
Developing Internal and External Proportional Integral Derivative Water Surface Controller in HEC-RAS



Abstract
1. Introduction
2. Materials and Methods
2.1. Studied Area
2.2. Simulation Model
2.3. Design of the Proportional–Integral–Derivative Controllers
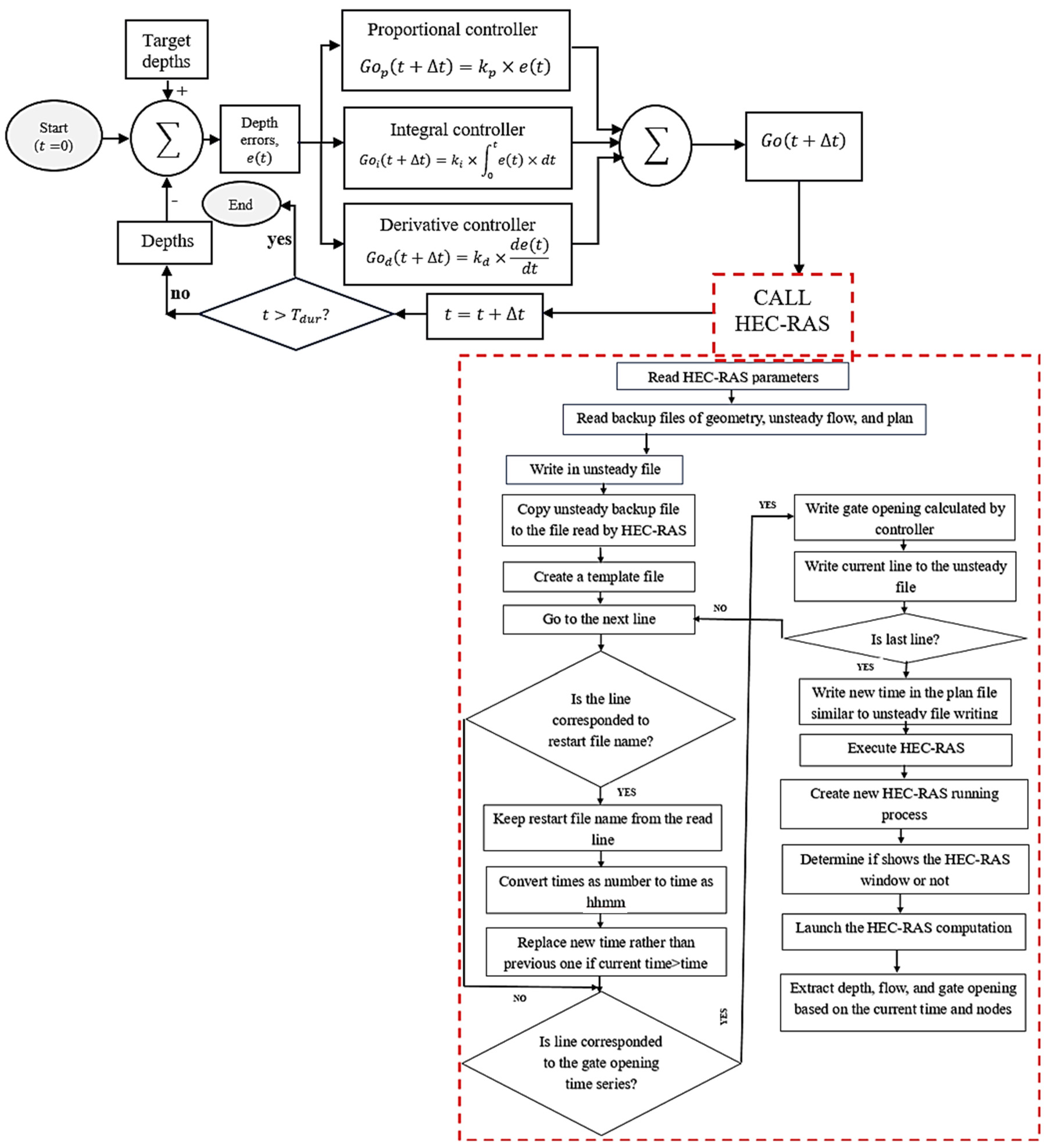
2.4. External Controller
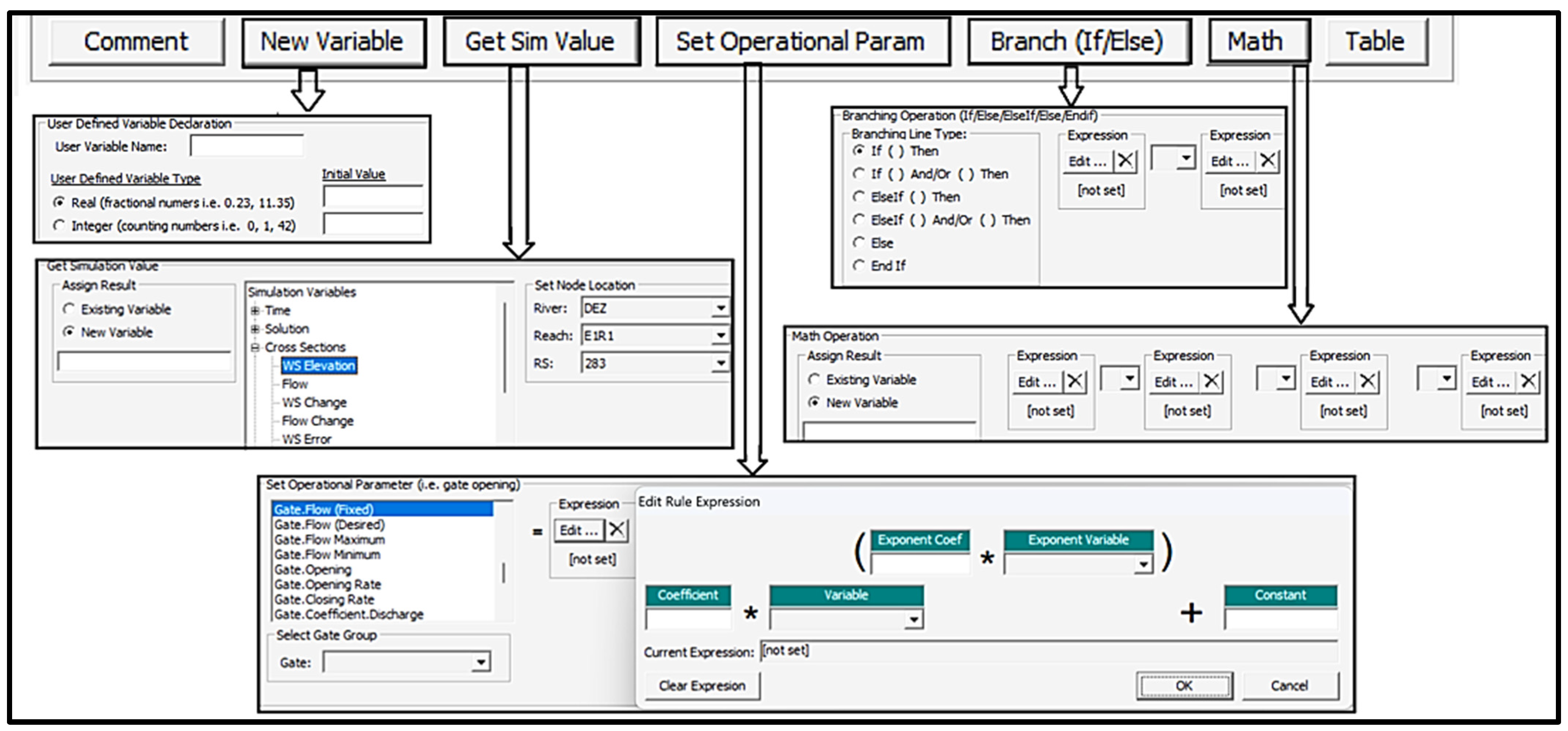
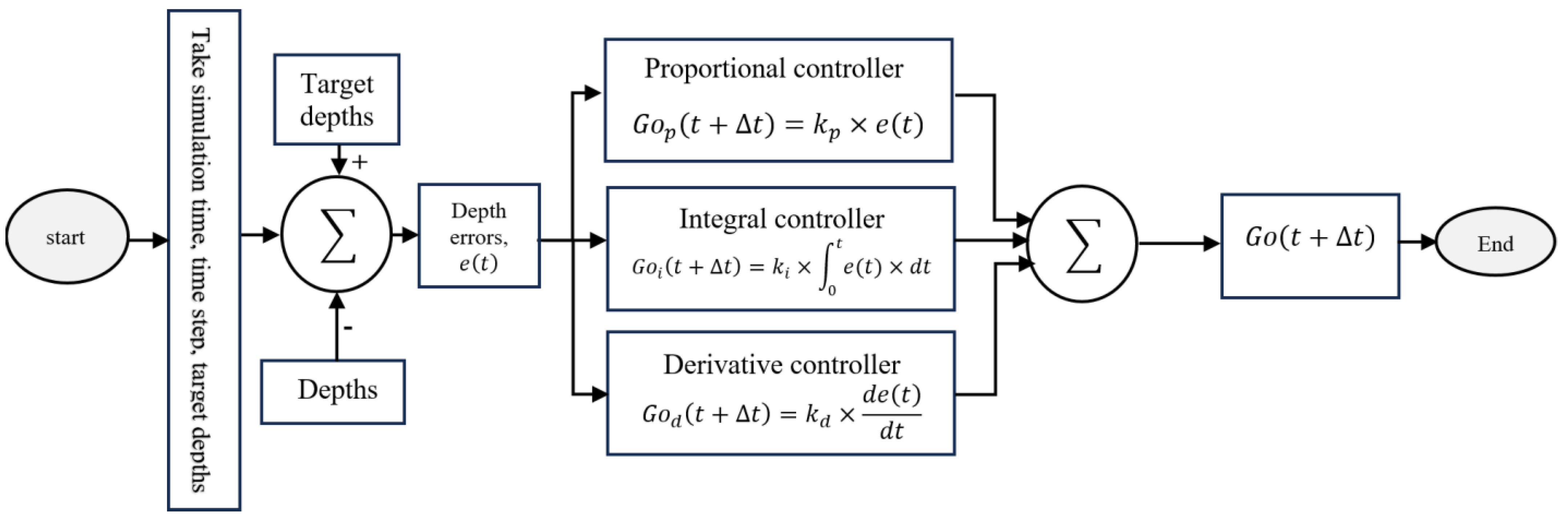
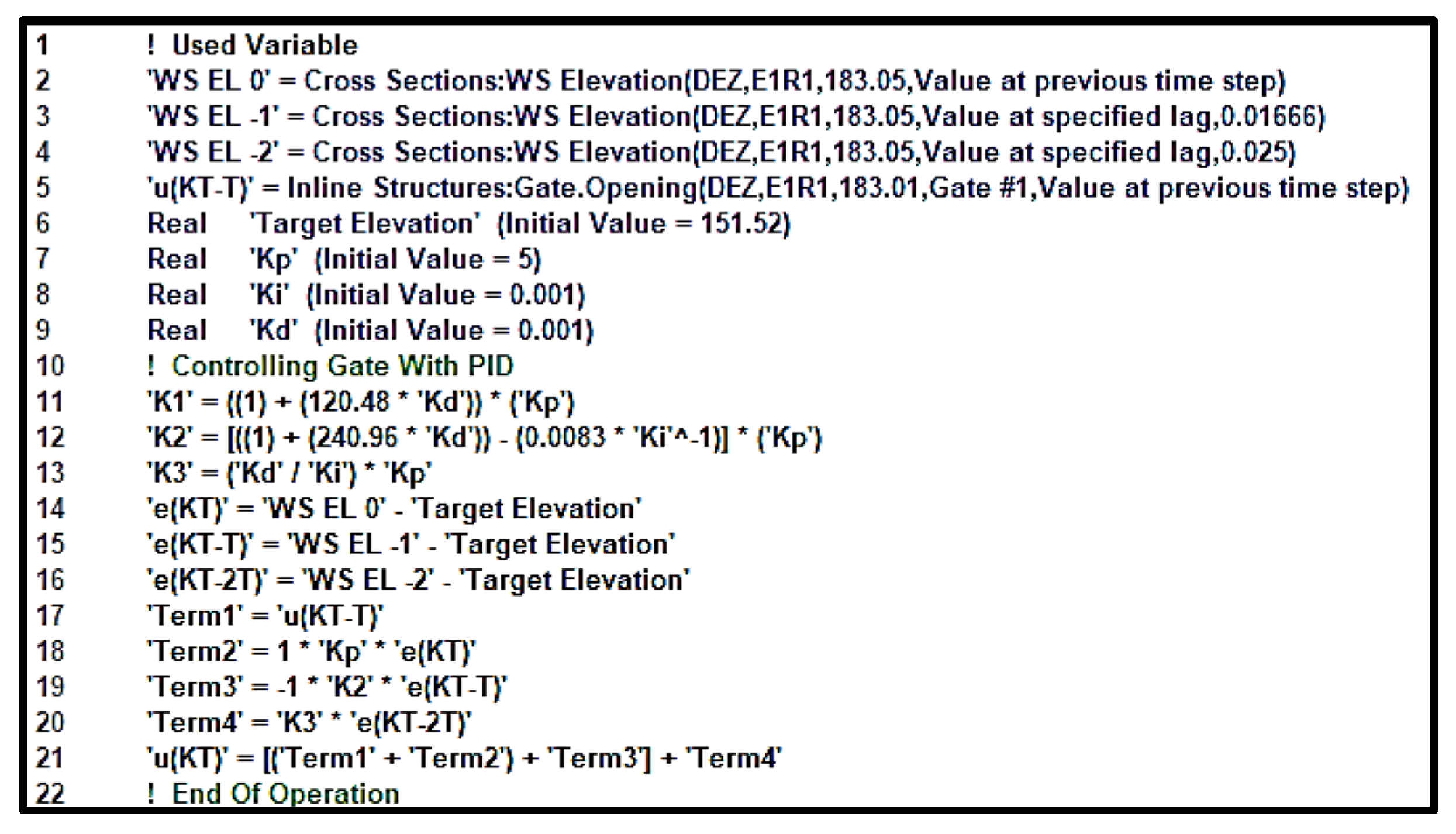
2.5. Internal controller
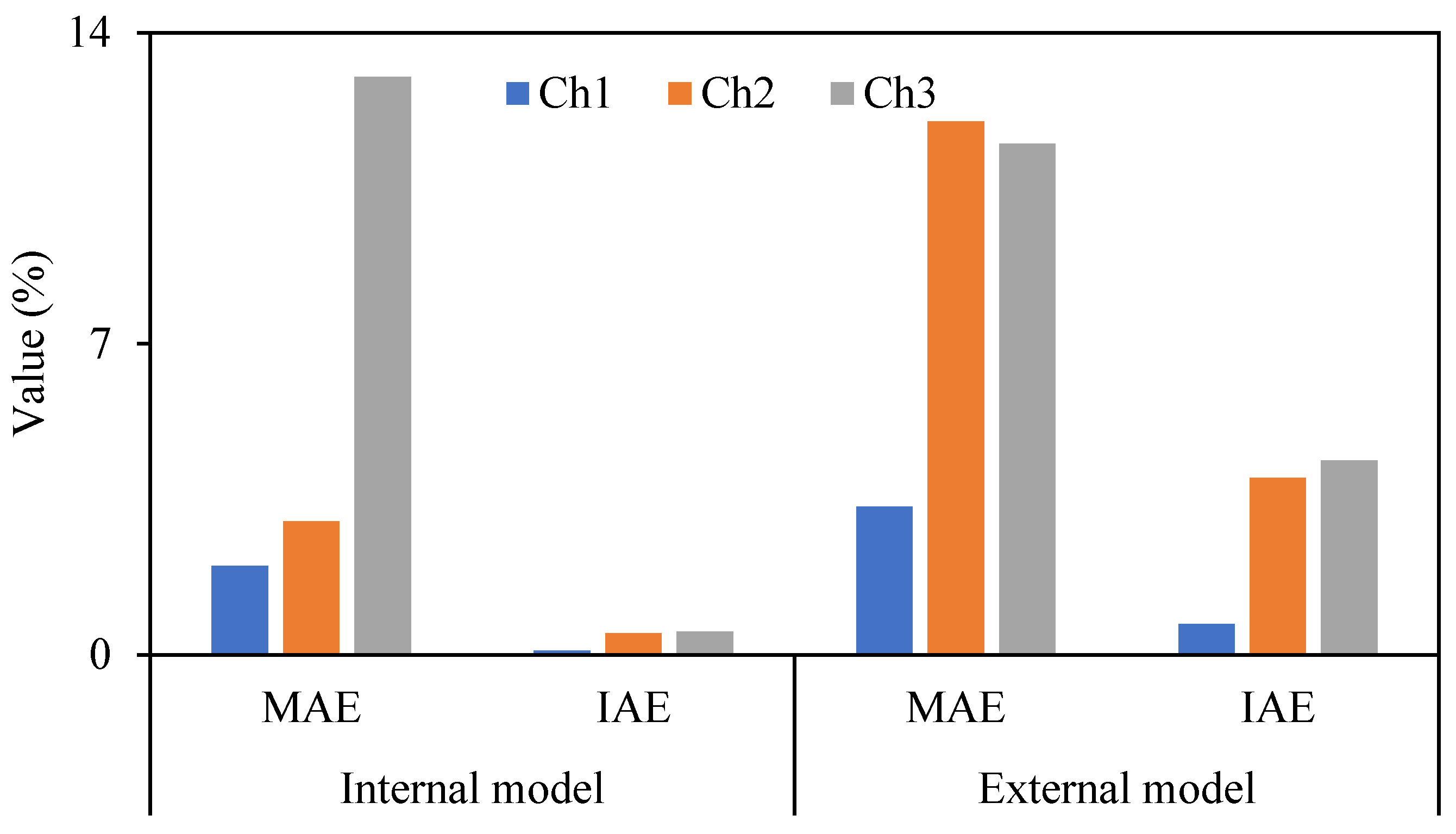
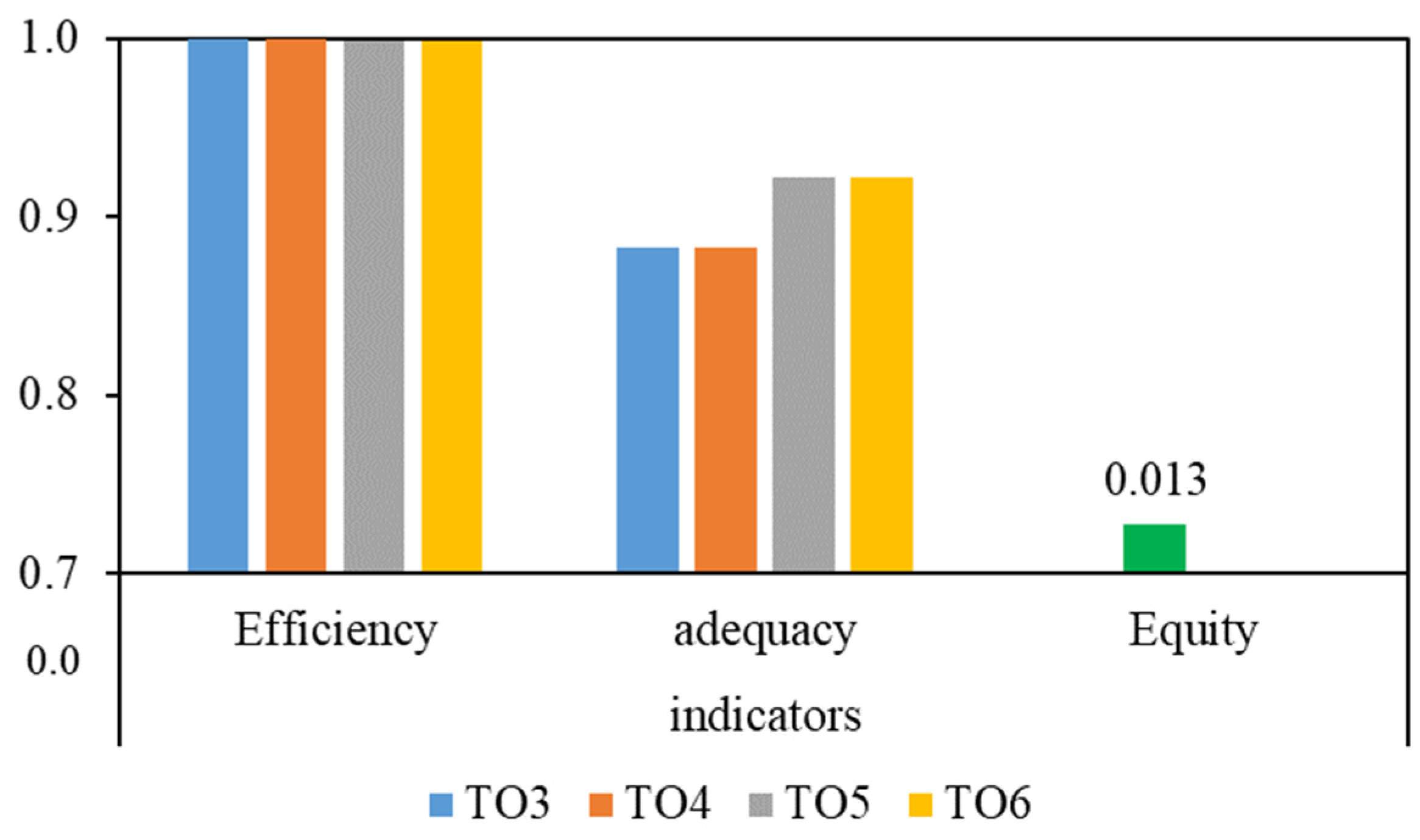
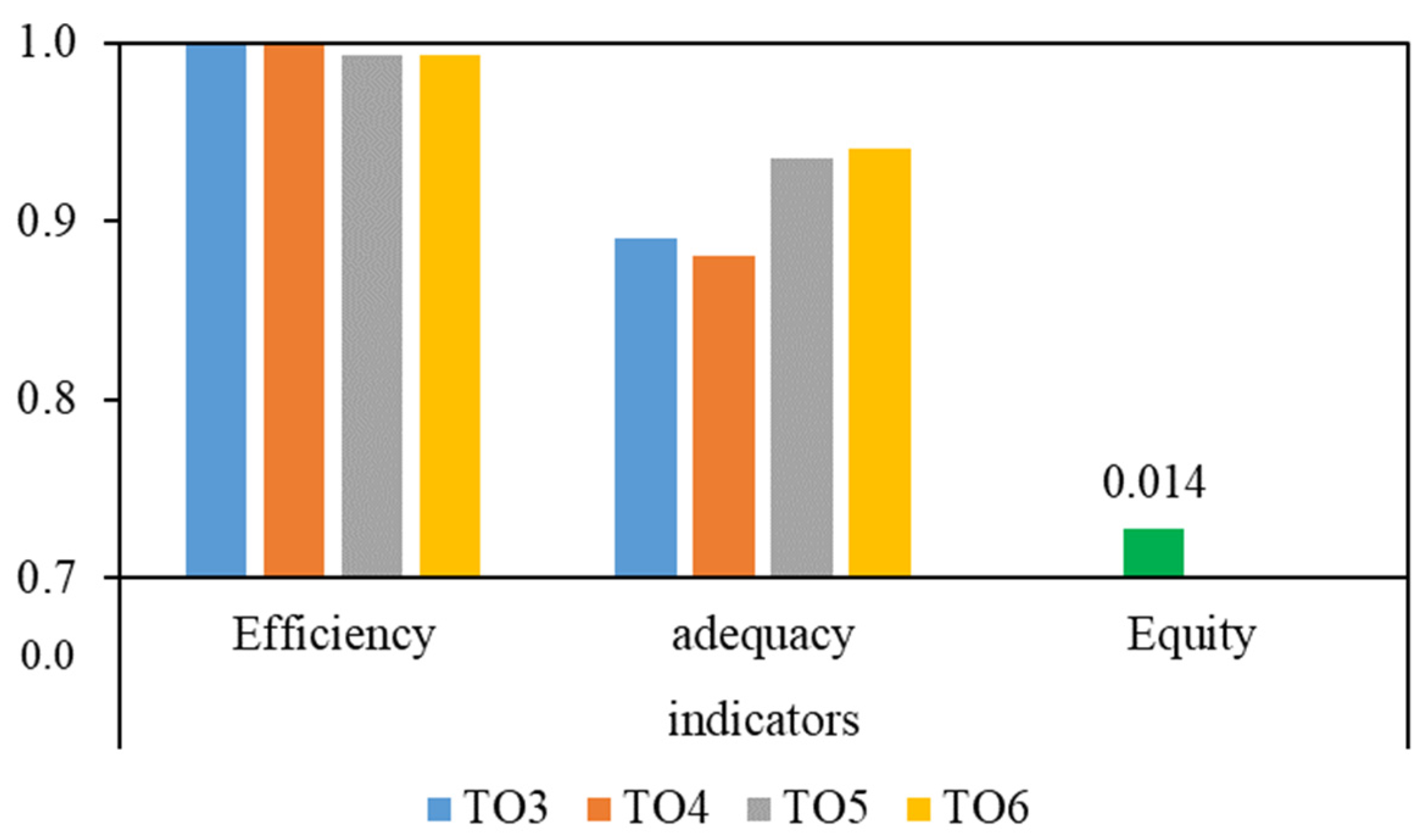
2.6. Indicators and Evaluation
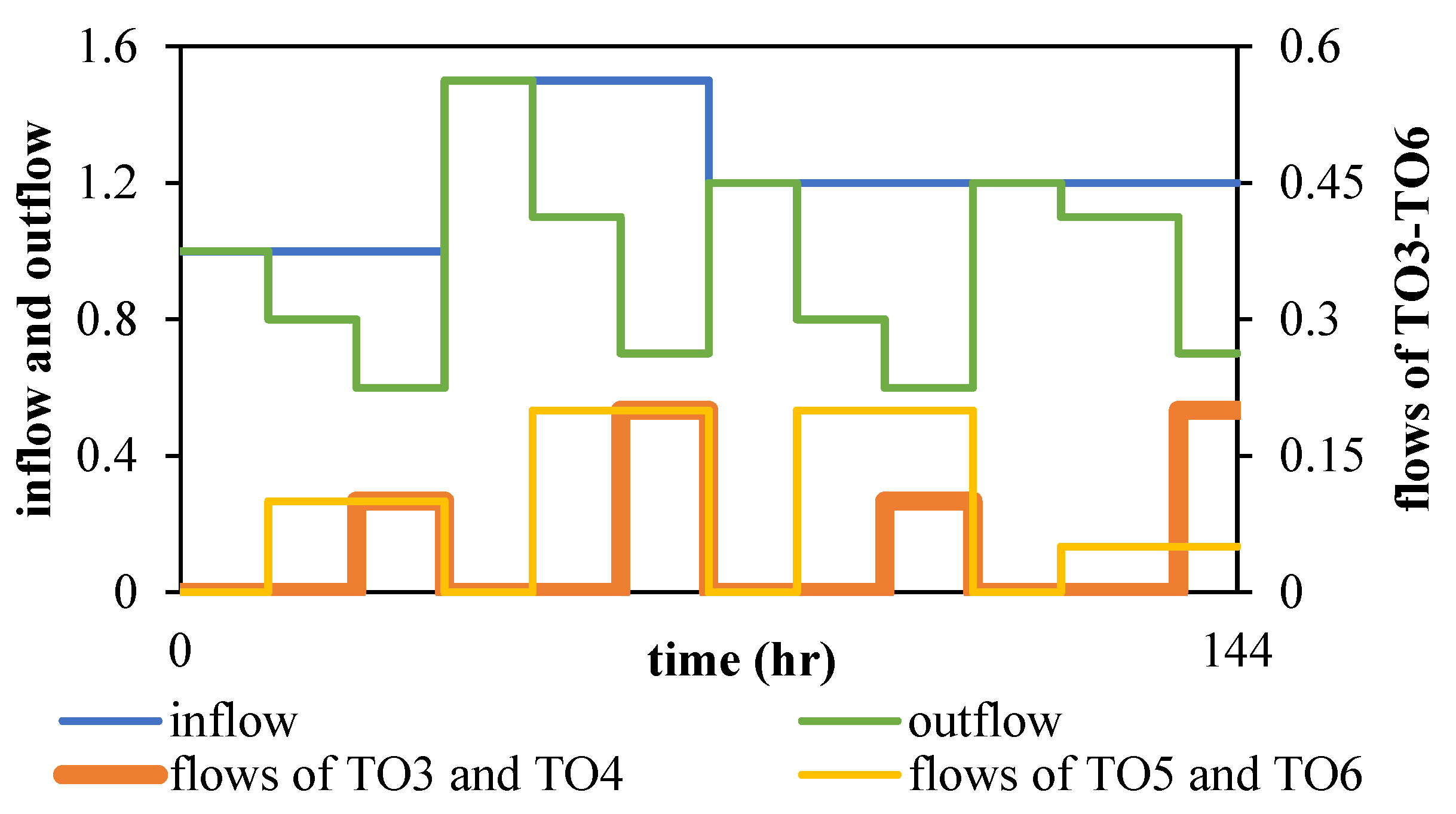
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fassoni-Andrade, A.C.; Fan, F.M.; Collischonn, W.; Fassoni, A.C.; Paiva, R.C.D.d. Comparison of numerical schemes of river flood routing with an inertial approximation of the Saint Venant equations. Rbrh 2018, 23, e10. [Google Scholar] [CrossRef]
- Daneshfaraz, R.; Dasineh, M.; Ghaderi, A. Evaluation of scour depth around bridge piers with HEC-RAS (case study: Bridge of Simineh Rood, Miandoab, Iran). Environ. Water Eng. 2019, 5, 91–102. [Google Scholar]
- Moussa, A.M.A. Evaluation of local scour around bridge piers for various geometrical shapes using mathematical models. Ain Shams Eng. J. 2018, 9, 2571–2580. [Google Scholar] [CrossRef]
- Pathan, A.I.; Agnihotri, P.G.; Patel, D.; Prieto, C. Mesh grid stability and its impact on flood inundation through (2D) hydrodynamic HEC-RAS model with special use of Big Data platform—A study on Purna River of Navsari city. Arab. J. Geosci. 2022, 15, 659. [Google Scholar] [CrossRef]
- Pathan, A.I.; Agnihotri, P. Application of new HEC-RAS version 5 for 1D hydrodynamic flood modeling with special reference through geospatial techniques: A case of River Purna at Navsari, Gujarat, India. Model. Earth Syst. Environ. 2021, 7, 1133–1144. [Google Scholar] [CrossRef]
- Madhuri, R.; Raja, Y.S.; Raju, K.S.; Punith, B.S.; Manoj, K. Urban flood risk analysis of buildings using HEC-RAS 2D in climate change framework. H2Open J. 2021, 4, 262–275. [Google Scholar] [CrossRef]
- Abd El Shafy, M.; Mostafa, A. Flash Flood Modeling Using HEC-RAS (2D) model on Wadi Reem in the western region, Kingdom of Saudi Arabia. J. Egypt. Acad. Soc. Environ. Dev. D Environ. Stud. 2021, 22, 17–32. [Google Scholar] [CrossRef]
- Karim, I.R.; Hassan, Z.F.; Abdullah, H.H.; Alwan, I.A. 2D-HEC-RAS modeling of flood wave propagation in a Semi-Arid Area due to dam overtopping failure. Civ. Eng. J. 2021, 7, 1501–1514. [Google Scholar] [CrossRef]
- Bilali, A.E.; Taleb, I.; Nafii, A.; Taleb, A. A practical probabilistic approach for simulating life loss in an urban area associated with a dam-break flood. Int. J. Disaster Risk Reduct. 2022, 76, 103011. [Google Scholar] [CrossRef]
- Zeiger, S.J.; Hubbart, J.A. Measuring and modeling event-based environmental flows: An assessment of HEC-RAS 2D rain-on-grid simulations. J. Environ. Manag. 2021, 285, 112125. [Google Scholar] [CrossRef]
- Muñoz, D.F.; Yin, D.; Bakhtyar, R.; Moftakhari, H.; Xue, Z.; Mandli, K.; Ferreira, C. Inter-model comparison of Delft3D-FM and 2D HEC-RAS for total water level prediction in coastal to inland transition zones. JAWRA J. Am. Water Resour. Assoc. 2022, 58, 34–49. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Ferraro, D.; Barca, P. Is HEC-RAS 2D accurate enough for storm-event hazard assessment? Lessons learnt from a benchmarking study based on rain-on-grid modelling. J. Hydrol. 2021, 603, 126962. [Google Scholar] [CrossRef]
- Mustafa, A.; Szydłowski, M. Application of different building representation techniques in HEC-RAS 2-D for urban flood modeling using the Toce River experimental case. PeerJ 2021, 9, e11667. [Google Scholar] [CrossRef] [PubMed]
- Mollazeynali, H.; Shahverdi, K. Application of Controlled Gates Boundary Condition in HEC-RAS in Water Conveyance and Distribution Systems. J. Water Irrig. Manag. 2022, 12, 847–858. [Google Scholar]
- Nourozirad, Z.; Shahverdi, K.; Ghodousi, H. Check Structure Level Regulation in Water Supply Canals using RBO in HEC-RAS. Water Irrig. Manag. 2023, 13, 341–350. [Google Scholar]
- Papaioannou, G.; Markogianni, V.; Loukas, A.; Dimitriou, E. Remote sensing methodology for roughness estimation in ungauged streams for different hydraulic/hydrodynamic modeling approaches. Water 2022, 14, 1076. [Google Scholar] [CrossRef]
- Akiyanova, F.; Ongdas, N.; Zinabdin, N.; Karakulov, Y.; Nazhbiyev, A.; Mussagaliyeva, Z.; Atalikhova, A. Operation of Gate-Controlled Irrigation System Using HEC-RAS 2D for Spring Flood Hazard Reduction. Computation 2023, 11, 27. [Google Scholar] [CrossRef]
- Nohani, E. Estimating the Manning’s Roughness Coefficient in Rivers by Experimental Method. Foot 2019, 1, 50. [Google Scholar]
- Hadi, Z.N.; Almansori, N.J.H. Estimation of manning coefficient for the section between Al-Hindiya barrage and Al-Kufa barrage utilizing HEC-RAS. Mater. Today Proc. 2023, 80, 2595–2601. [Google Scholar] [CrossRef]
- Serede, I.J.; Mutua, B.M.; Raude, J.M. Calibration of channel roughness coefficient for Thiba Main Canal Reach in Mwea irrigation scheme, Kenya. Hydrology 2015, 3, 55–65. [Google Scholar] [CrossRef]
- Shahverdi, K.; Talebmorad, H. Automating HEC-RAS and linking with particle swarm optimizer to calibrate manning’s roughness coefficient. Water Resour. Manag. 2023, 37, 975–993. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, Z.; Zhao, J.; Zheng, H. Constrained model predictive control algorithm for cascaded irrigation canals. J. Irrig. Drain. Eng. 2019, 145, 04019009. [Google Scholar] [CrossRef]
- Carlucho, I.; De Paula, M.; Acosta, G.G. Double Q-PID algorithm for mobile robot control. Expert Syst. Appl. 2019, 137, 292–307. [Google Scholar] [CrossRef]
- Kong, L.; Yang, Q.; Chen, R.; Zhang, Z.; Li, Y.; Shi, Y. Improved Proportional Integral (PI) controller for water level control in open channel systems: A case study of the Middle Route Project for South-to-North Water Transfer. J. Hydrol. Reg. Stud. 2024, 51, 101646. [Google Scholar] [CrossRef]
- Tufenkci, S.; Alagoz, B.B.; Kavuran, G.; Yeroglu, C.; Herencsar, N.; Mahata, S. A theoretical demonstration for reinforcement learning of PI control dynamics for optimal speed control of DC motors by using Twin Delay Deep Deterministic Policy Gradient Algorithm. Expert Syst. Appl. 2023, 213, 119192. [Google Scholar] [CrossRef]
- Hosseini Jolfan, M.; Hashemy Shahdany, S.M.; Javadi, S.; Mallakpour, I.; Neshat, A. Effects of canal automation on reducing groundwater extraction within irrigation districts: Case study of Qazvin irrigation district. Irrig. Drain. 2020, 69, 11–24. [Google Scholar] [CrossRef]
- Bhookya, J.; Kumar, M.V.; Kumar, J.R.; Rao, A.S. Implementation of PID controller for liquid level system using mGWO and integration of IoT application. J. Ind. Inf. Integr. 2022, 28, 100368. [Google Scholar] [CrossRef]
- Abd Mohammed, Y.; Karam, E.H.; Kadhim, N.N. Controlling Water Level by Using Modified Model Free Adaptive Controller. J. Eng. Sustain. Dev. 2023, 27, 375–383. [Google Scholar] [CrossRef]
- Zamani, S.; Parvaresh Rizi, A.; Isapoor, S. The effect of design parameters of an irrigation canal on tuning of coefficients and performance of a PI controller. Irrig. Drain. 2015, 64, 519–534. [Google Scholar] [CrossRef]
- Pratama, S.C.; Susanto, E.; Wibowo, A.S. Design and implementation of water level control using gain scheduling PID back calculation integrator Anti Windup. In Proceedings of the 2016 International Conference on Control, Electronics, Renewable Energy and Communications (ICCEREC), Bandung, Indonesia, 13–15 September 2016; pp. 101–104. [Google Scholar]
- Getu, B.N. Water level controlling system using PID controller. Int. J. Appl. Eng. Res. 2016, 11, 11223–11227. [Google Scholar]
- Arain, B.A.; Shaikh, M.F.; Harijan, B.L.; Memon, T.D.; Kalwar, I.H. Design of PID controller based on PSO algorithm and its FPGA synthesization. Int. J. Eng. Adv. Technol. 2018, 8, 201–206. [Google Scholar]
- Saddam, G.; Batlle, V.F. Robust Fractional Order Control of a Pool of a Main Irrigation Canal in Submerged Flow Condition. IFAC-Pap. 2020, 53, 16611–16616. [Google Scholar] [CrossRef]
- Budiastra, I.N.; Pemayun, A. Prototype Design of Water Level Control System Based on PID Controller in PLTMH. J. Electr. Electron. Inform. 2020, 4, 53–56. [Google Scholar] [CrossRef]
- Chen, L. Principle and Simulation PID Controller of Liquid Level System. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; p. 012187. [Google Scholar]
- Prastiyo, D.; Aji, W.S. Irrigation Sluice Control System Using Algorithm Based DC Motor PID And Omron PLC. Control Syst. Optim. Lett. 2023, 1, 19–26. [Google Scholar] [CrossRef]
- Tian, X.; Negenborn, R.R.; van Overloop, P.-J.; Maestre, J.M.; Sadowska, A.; van de Giesen, N. Efficient multi-scenario model predictive control for water resources management with ensemble streamflow forecasts. Adv. Water Resour. 2017, 109, 58–68. [Google Scholar] [CrossRef]
- Clemmens, A.J.; Kacerek, T.F.; Grawitz, B.; Schuurmans, W. Test cases for canal control algorithms. J. Irrig. Drain. Eng. 1998, 124, 23–30. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicator | Description | Range | Class |
|---|---|---|---|
| maximum water depth deviation from setpoint | 0–0.15 0.16–0.30 >30 | good fair poor | |
| mean water depth deviation from setpoint | 0–0.15 0.16–0.30 >30 | good fair poor | |
| Efficiency | Excess delivered water relative to the required | 1–0.85 0.84–0.70 <0.7 | good fair poor |
| Supplying uniformity of required water in canal intervals | 0–0.10 0.11–0.25 >0.25 | good fair poor | |
| Deficit delivered water relative to the required | 1–0.9 0.89–0.80 <0.8 | good fair poor |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahverdi, K.; Noorali, A.; Ghodousi, H.; Berndtsson, R. Developing Internal and External Proportional Integral Derivative Water Surface Controller in HEC-RAS. Water 2024, 16, 1699. https://doi.org/10.3390/w16121699
Shahverdi K, Noorali A, Ghodousi H, Berndtsson R. Developing Internal and External Proportional Integral Derivative Water Surface Controller in HEC-RAS. Water. 2024; 16(12):1699. https://doi.org/10.3390/w16121699
Chicago/Turabian StyleShahverdi, Kazem, Atefe Noorali, Hesam Ghodousi, and Ronny Berndtsson. 2024. "Developing Internal and External Proportional Integral Derivative Water Surface Controller in HEC-RAS" Water 16, no. 12: 1699. https://doi.org/10.3390/w16121699
APA StyleShahverdi, K., Noorali, A., Ghodousi, H., & Berndtsson, R. (2024). Developing Internal and External Proportional Integral Derivative Water Surface Controller in HEC-RAS. Water, 16(12), 1699. https://doi.org/10.3390/w16121699