1. Introduction
Extreme weather events in recent years have greatly increased the amount of rainfall in the mountains of Taiwan. Substantial rainfall affects rock slope safety by infiltrating rock slopes via weak planes, thereby weakening the shear strength of the slope body, raising the water table, and increasing the weight and downslide stress of the soil. This, in turn, causes parts of the rock slopes to deform and collapse. The fragile geological environment and heavy rainfall conditions in Taiwan make for frequent landslide disasters, mostly around mountain roads, villages, and valley banks. Large-scale rockslide disasters in the past include the complex landslide in Tuchang Village, Hsinchu in 2004, the collapse event at 3.1 km on National Freeway No. 3 in 2010, and the complex landslide in Zhongzhi Village, Wulai in 2016, all of which greatly threatened protected targets downstream. Rock slope failure is generally determined by the discontinuities between strata, such as bedding, faults, foliation, and joints [
1]. Prior to rock slope failure and creep deformation, tension cracks can generally be observed developing at the top of the slope, affecting it or causing the rocks on the slope toe to overturn or bulge. The damage gradually extends upwards toward important public facilities or villages, and if the scope of the creep damage is not determined and protective measures are not taken in a timely manner, major disasters may occur. In addition to enhancing emergency responses to landslides, disaster warnings for evacuation are also crucial to minimize losses. Model tests, numerical simulations, and real-time deformation monitoring are thus employed to grasp rock slope deformation, the timing of failure, and the hazard ranges of rock failure and deposits. These are all important issues in rock slope disaster prevention [
2,
3,
4,
5,
6,
7,
8].
Wedge failures are a common type of failure in rockslides, and mostly occur where the strata have an oblique attitude [
9]. Most wedge failures take place in rock masses via the following methods [
10]: (a) sliding along the line of intersection of the two planes, (b) sliding along only a single plane accompanied by rock mass fracturing, (c) rotation and sliding along only a single plane accompanied by rock mass fracturing, and (d) if the rock mass has a high joint density, gradual disintegration of the rock mass along two planes. A number of studies have examined the issue of rock wedge stability [
1,
2,
4,
5,
9,
11,
12,
13,
14,
15,
16] and also pointed out that wedge failure is related to its intersection angle and half-wedge angle, but they did not consider the three-dimensional rock slope state. Hoek and Bray [
9] proposed the rigid wedge method (RWM), which assumes that the wedge is a rigid body and ignores shear forces that intersect perpendicular to the discontinuities. It is assumed to be zero in the slope stability analysis, and RWM does not consider the deformation of the rock mass itself. Kovari and Fritz [
17] considered the influence of static and dynamic loads on wedge models and used model tests and numerical methods to assess the applicability of the limit equilibrium method to wedge slopes. Riquelmea et al. [
6] used Slope Mass Rating (SMR) to characterize the wedge failure mechanism found through 3D point cloud analysis. Grenon and Hadjigeorgiou [
3] proposed a methodology for linking a fracture system model to limit equilibrium and analyze the wedge failure. Smith and Arnhardt [
18] proposed the circle method, which can assess the sliding and toppling mechanisms of individual planes and pairs of planes forming wedges. Model verifications were conducted using real-world data from Turkey and Japan, and the influence of dynamic loads on slope stability in earthquake-prone areas was analyzed and discussed using parameter back-calculation. Kusmar et al. [
14] designed four types of test models in their study: static tests, dynamic tests, dry tests, and wet tests. Although these tests conformed to the limit equilibrium method, they could not accurately reflect the behavior of wedge slopes for the following reasons:
- (a)
The two-dimensional limit equilibrium method cannot describe the behavior of real three-dimensional wedge slope failure;
- (b)
Rock wedges are composite materials with both joints and weak planes, so an analysis with a single rigid body model cannot completely describe its physical behavior;
- (c)
The material parameters and variability of rock masses are complex and cannot be described using a single material; thus, the limit equilibrium method cannot express the influence of weak planes in the slope on failure characteristics.
To fill these gaps, this study examined the distributions of discontinuities and changes in intersection planes and angles in various types of oblique slopes, developed moderately simplified physical models, and used these models to investigate the deformation of wedge slopes until failure under conditions of rainfall infiltration. The factors of wedge failure caused by rainfall include rise in groundwater level (increase in water pressure), decrease in effective stress and frictional resistance, failure caused by seepage of weak surface of rock mass, etc. The softening of weak interlayers is also an important factor in rainfall-induced landslides. Xu et al. [
8] used nanoindentation experiments and simulations to study the softening of weak interlayers during landslides. The results of the study found that the friction angle of shale was almost unchanged after immersion in water, while the elastic modulus and cohesion decreased significantly. The shear strength of the weak interlayer decreased significantly, and the plastic zone developed along the weak interlayer, eventually forming a landslide. However, because of the complexity all the factors, the establishment of more complex physical models or numerical models has its limitations, and it is difficult to deeply understand the characteristics influencing each factor. Therefore, in this study, we only moderately simplified the wedge failure model of the rock slope, and first discussed the shear strength weakening characteristics of the discontinuity of the rock mass, assuming that the shear strength weakening of the discontinuity occurs in the entire rock mass during the rainfall period. In order to initially grasp the failure behavior under different wedge slope conditions, other factors will be gradually explored in the future.
3. Failure Processes of Physical Wedge Models
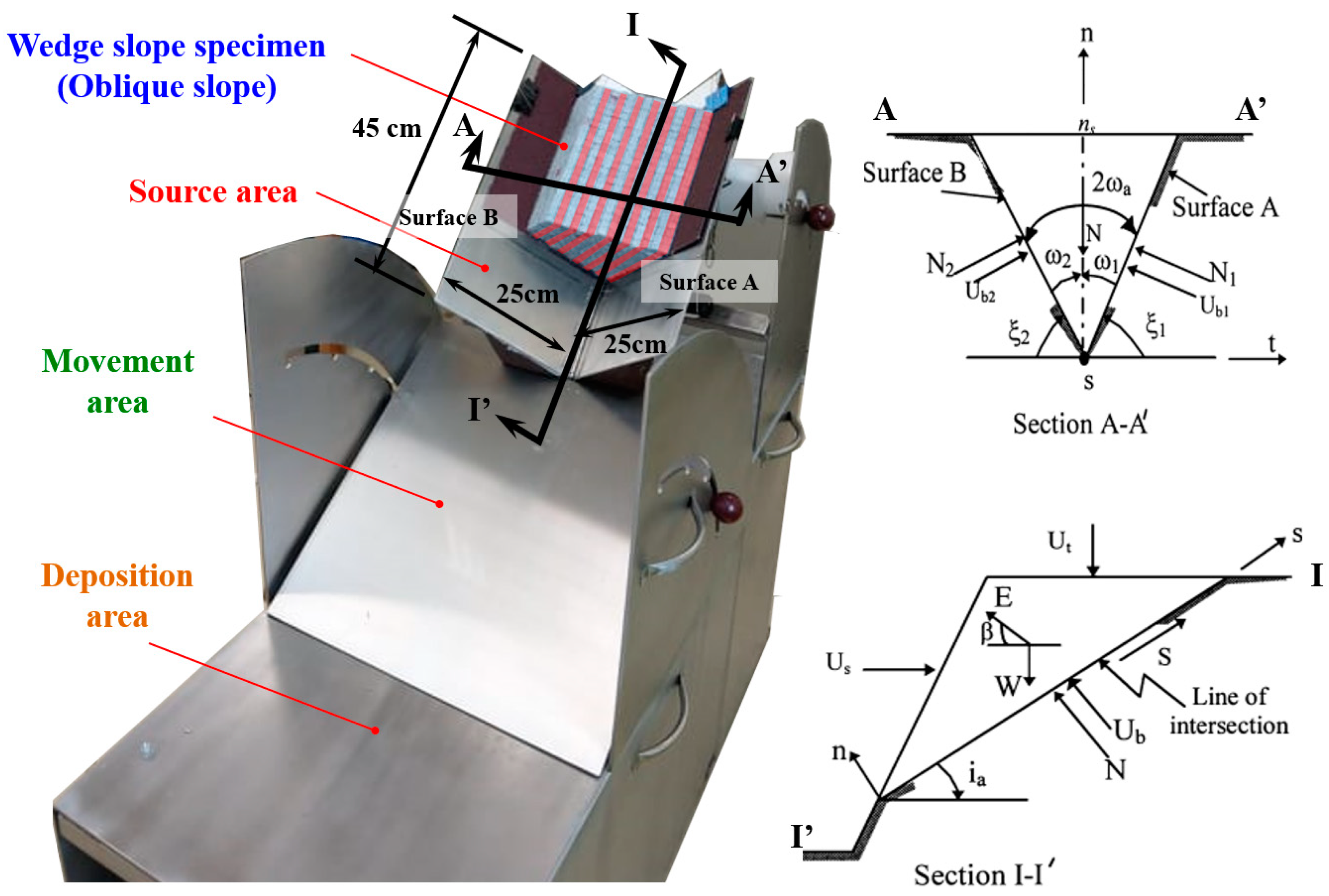
Rainfall intensity was controlled at 15 mm/h for constant surface water infiltration conditions. We varied
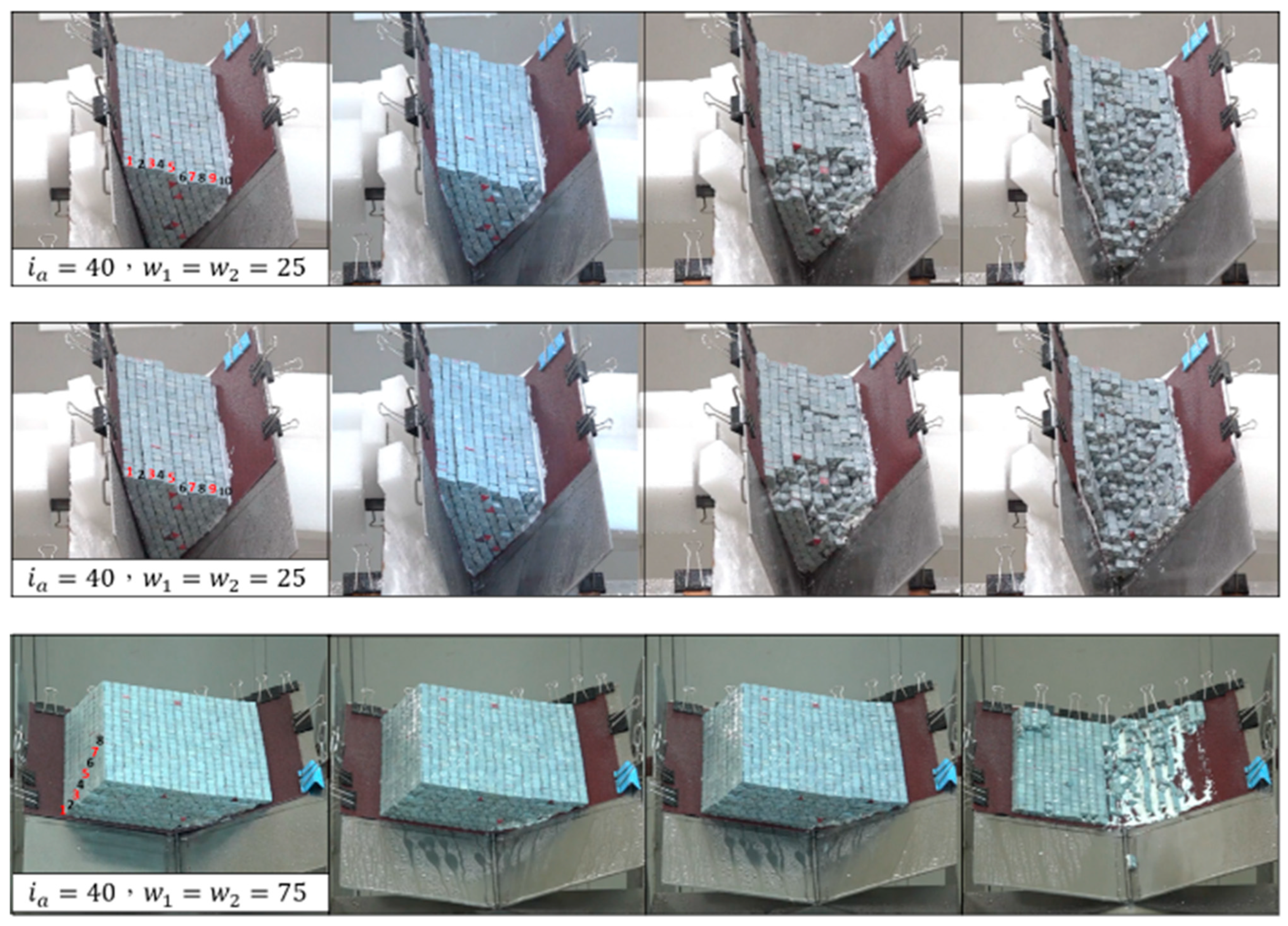
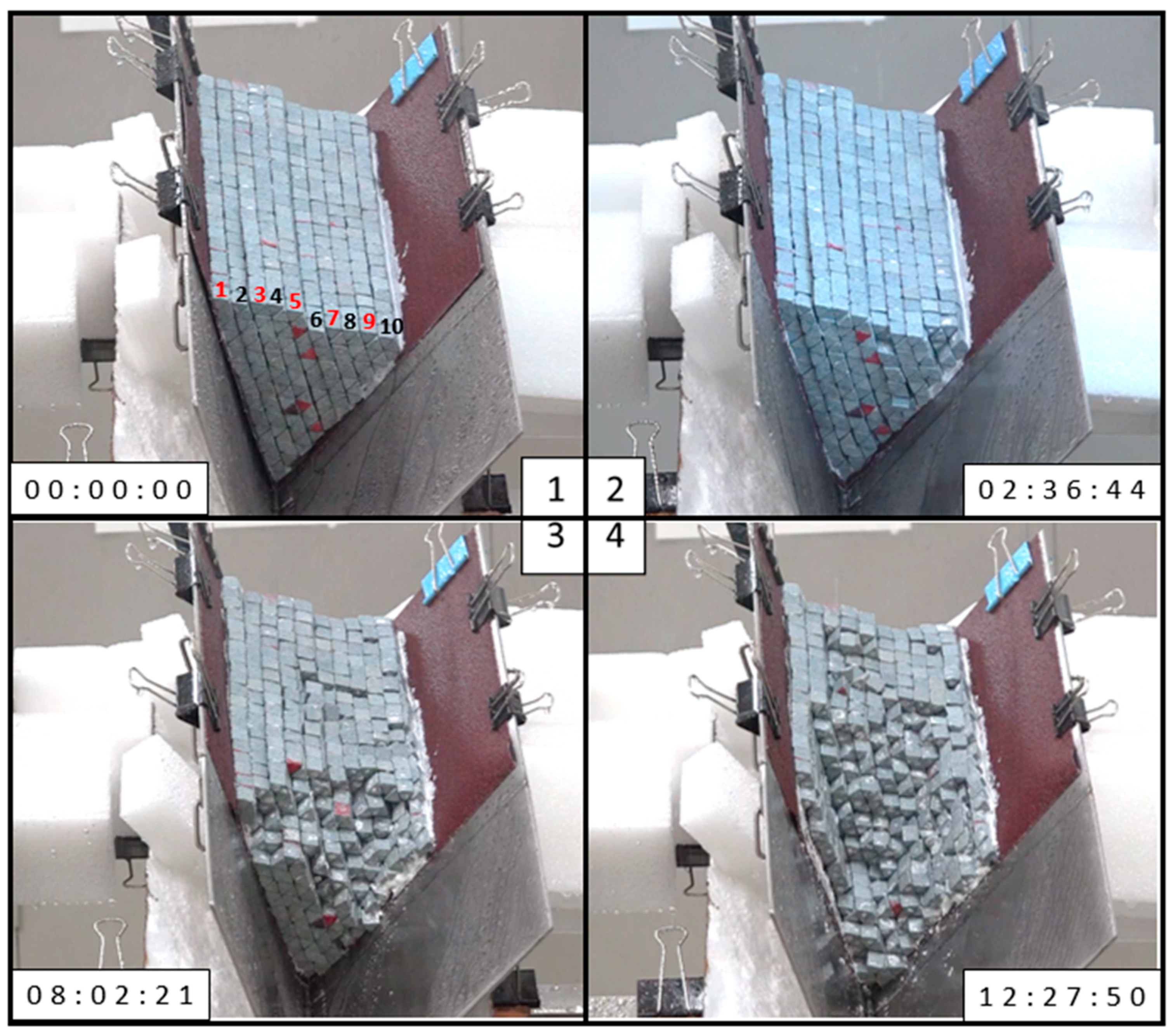
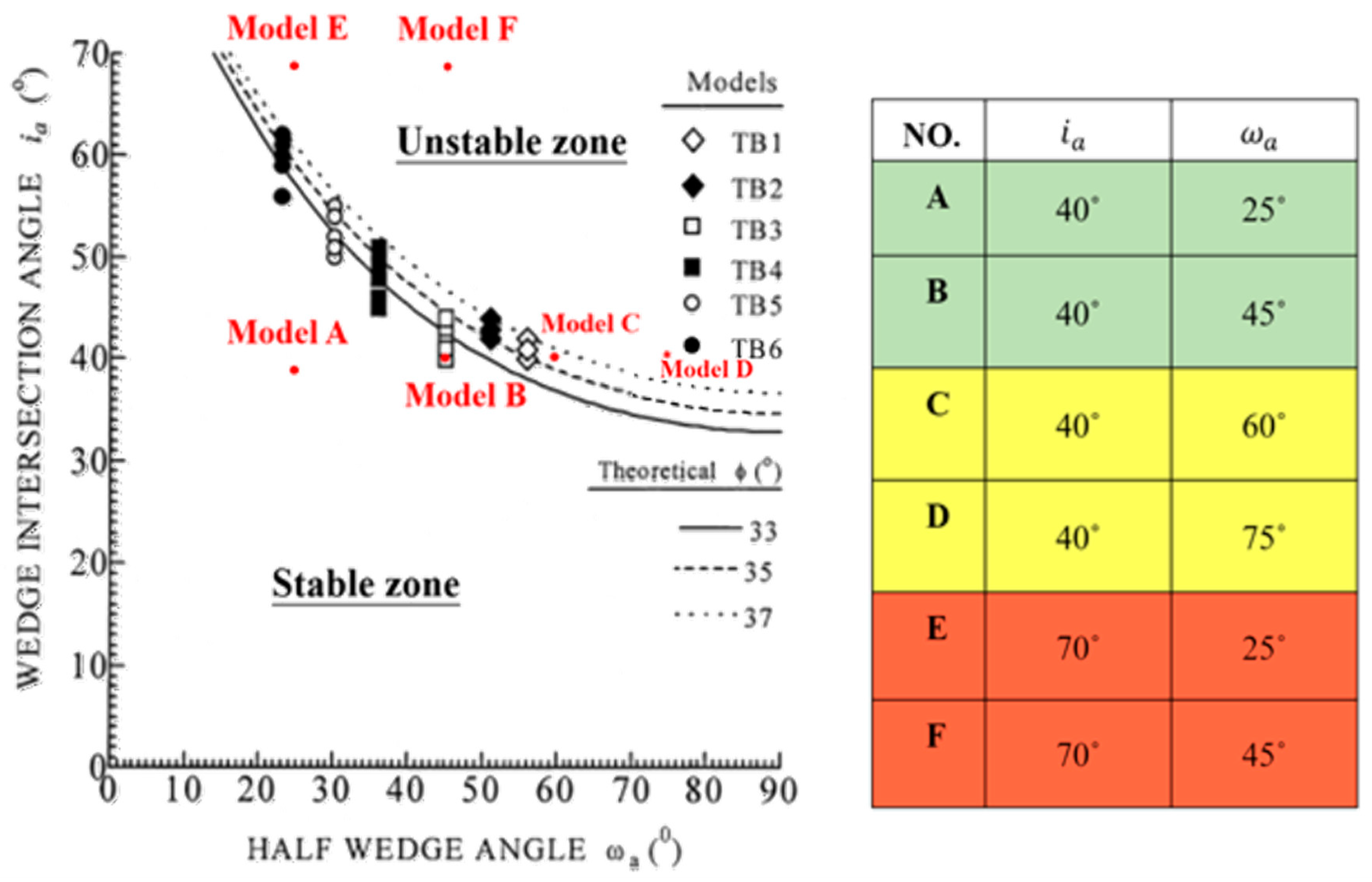
ia, ω, the eccentricity of ω, and the oblique direction while observing the processes and behavioral characteristics of wedge failure in the oblique slope under rainfall and slope toe daylight conditions. The primary conditions of Model A were
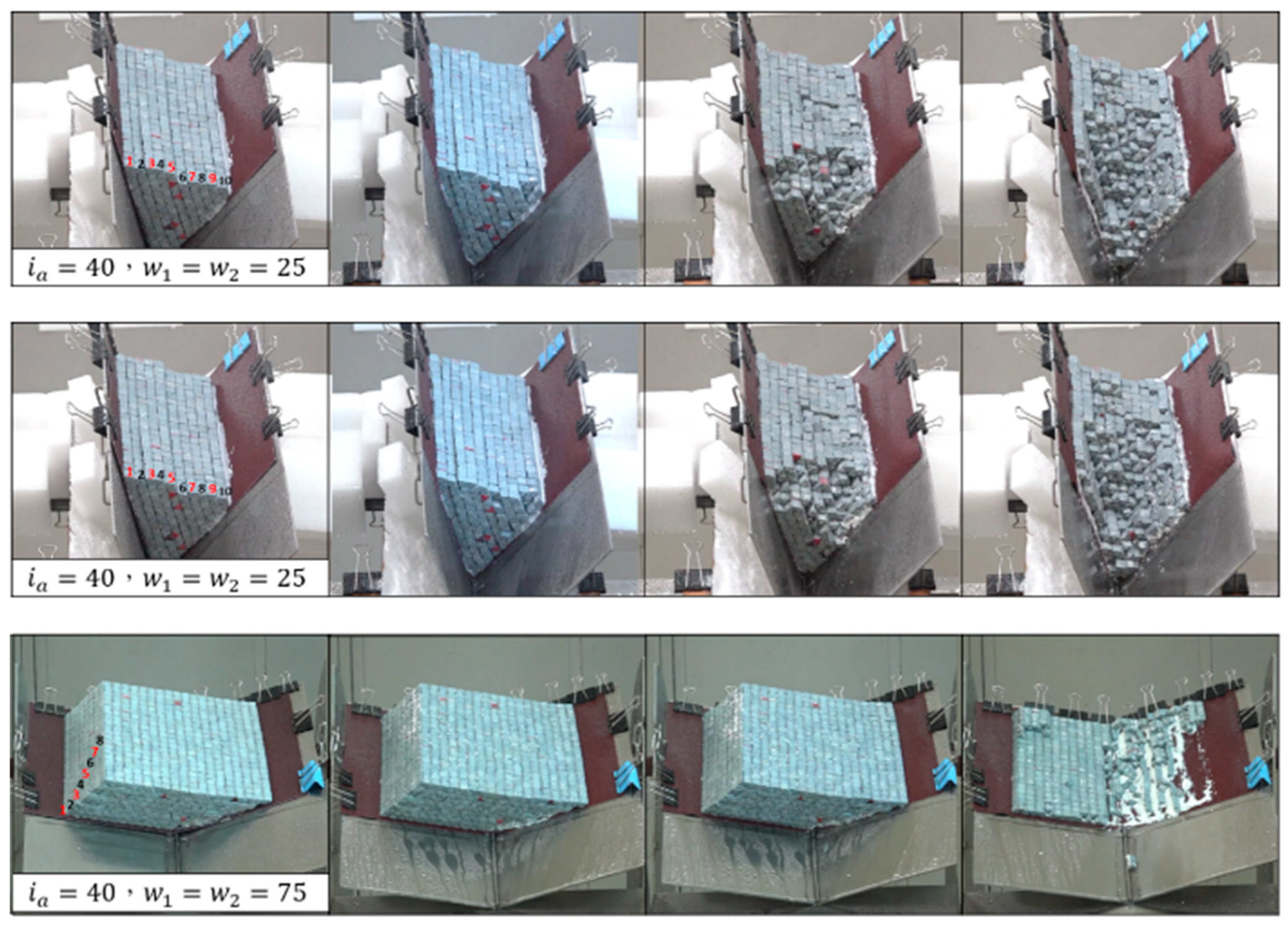
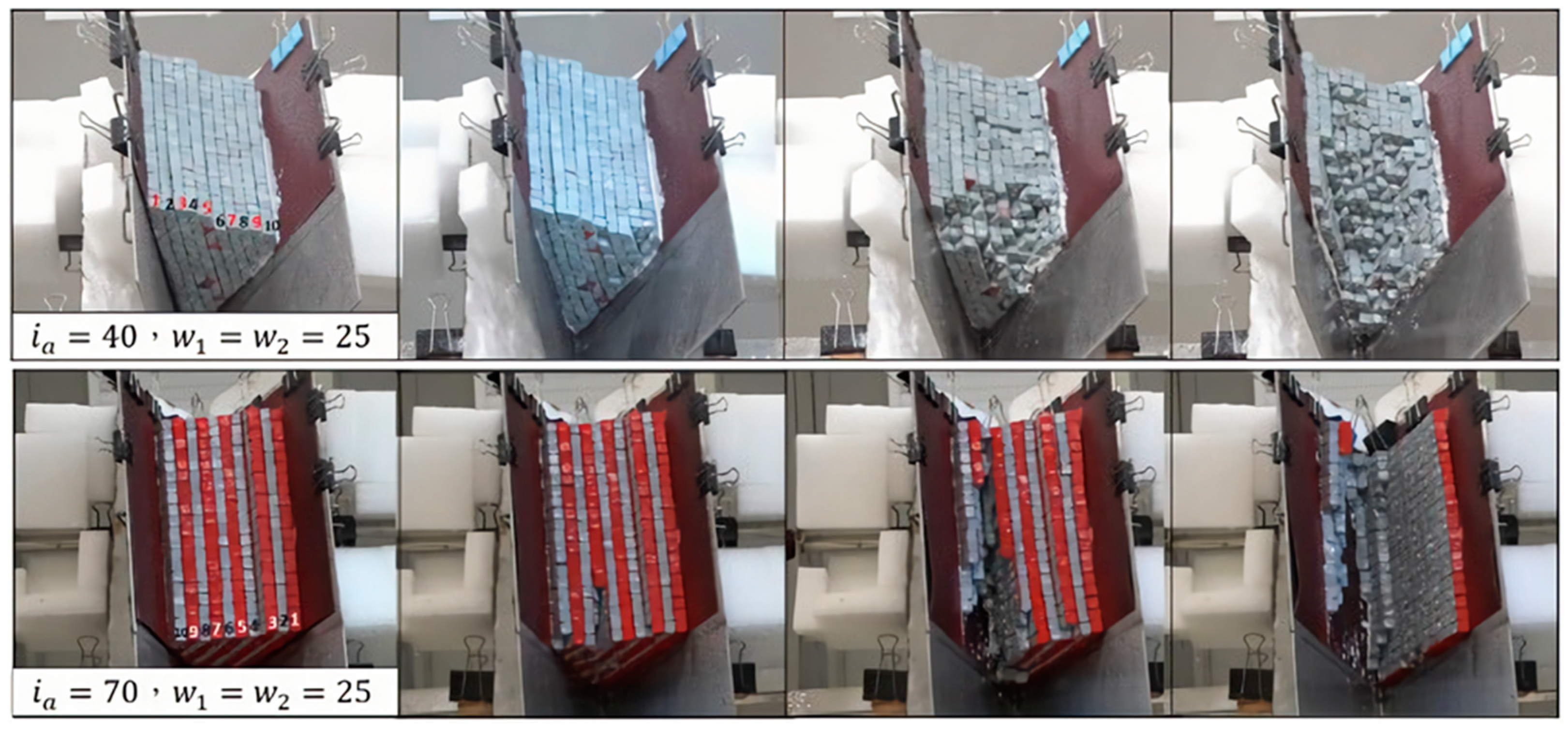
ia = 40° and ω1 = ω2 = 25°, and the duration of the test was 12 h 27 min 55 s. The test procedure is depicted in
Figure 6. In the initial stage, the initial resting state before the rainfall began, the oblique slope strata were inclined towards the left plate, and none of the rocks showed any signs of displacement or deformation. After the test started, the model began to soften from the water, and then, because of its own weight, further softened and deformed. The rock at locations No. 6 and No. 7 (close to the left plate) showed signs of dislocation and deformation. The model gradually slid downwards along the weak plane along the left plate. Some of the rock where the slope toe daylighted (locations No. 9 and No. 10) fell. This stage is mainly characterized by local slope failure (00:00:00–02:36:44) followed by the development of wedge failure (02:36:45–08:02:20). Because of surface water infiltration and the weakening of the strata at locations No. 4–10, approximately 17% of the lower portion of the entire rock mass slid downward, and tension cracks appeared in the upper portion of locations No. 5–9. The tension cracks allowed surface water to infiltrate the model even more easily, thereby accelerating the collapse of the lower portion of the rock. Once some of the rock in the lower portion of the model collapsed, the daylighting of the slope toe caused the upper portion of the rock mass to slide down along the intersection angle. The tension cracks near the top of the slope gradually progressed towards the source, enlarging the wedge failure range. The final stage is the accelerated development of rock mass sliding (08:02:21–12:27:55). Following the collapse of the lower portion of the rock mass, the surface water continued to infiltrate deep into the rock mass, causing tension cracks to form at the source and deeper within the rock. Thus, the lower portion of the rock mass continued to deform and collapse. With progressive wedge failure, tension cracks began appearing in multiple places along the left and right plates and developing along the sides. Ultimately, around 30% of the center of the rock wedge and fell along the intersection line, and only a small-scale collapse took place instead of complete wedge failure.
The duration of the Model B (
ia = 40° and ω1 = ω2 = 45°) test was 12 h 26 min 23 s (
Figure 7). At first (initial slight deformation stage at 00:00:00–01:29:00), surface water infiltrated the model via weak planes, softening the model and causing slight deformation. At locations No. 2 and No. 3, tension cracks could be seen at the slope toe. In this stage, the model only presented slight deformation toward the left plate with no significant displacement. At 01:29:01–04:32:30, the entire model gradually moved downhill. Tension cracks appeared at the slope toe at location No. 2, and after the rainfall continued for an hour, the slope toe at locations No. 1–4 slowly slid, creating local tension cracks. Apparent bulges could be seen where the slope toe daylighted, and deformation was more significant at the slope toe on the left plate of the model than that on the right plate (continued development of slight deformation). During this stage (slope stabilization at 04:32:31–12:26:23), the rocks at locations No. 6–12 stabilized and showed no signs of deformation. The tension cracks at the slope toe of locations No. 2 and No. 3 continued to develop, and small-scale collapses took place. However, there were no significant deformations or tension cracks in the overall rock mass. Before the end of the test, the rock wedge had not slid significantly and remained stable after 05:56:13.
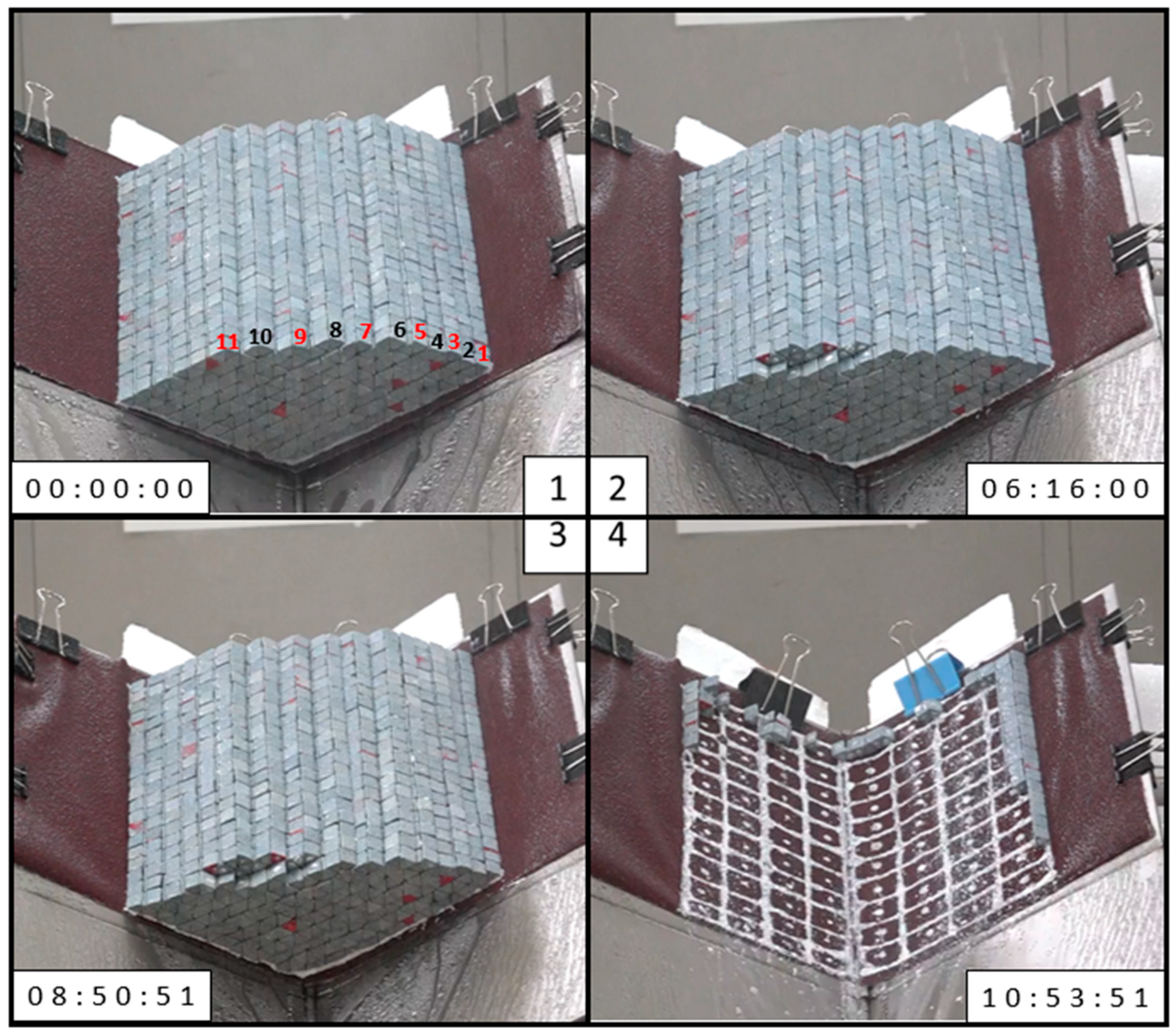
Model C (
ia = 40° and ω1 = ω2 = 60°) was tested for about 10 h 53 min 51 s (
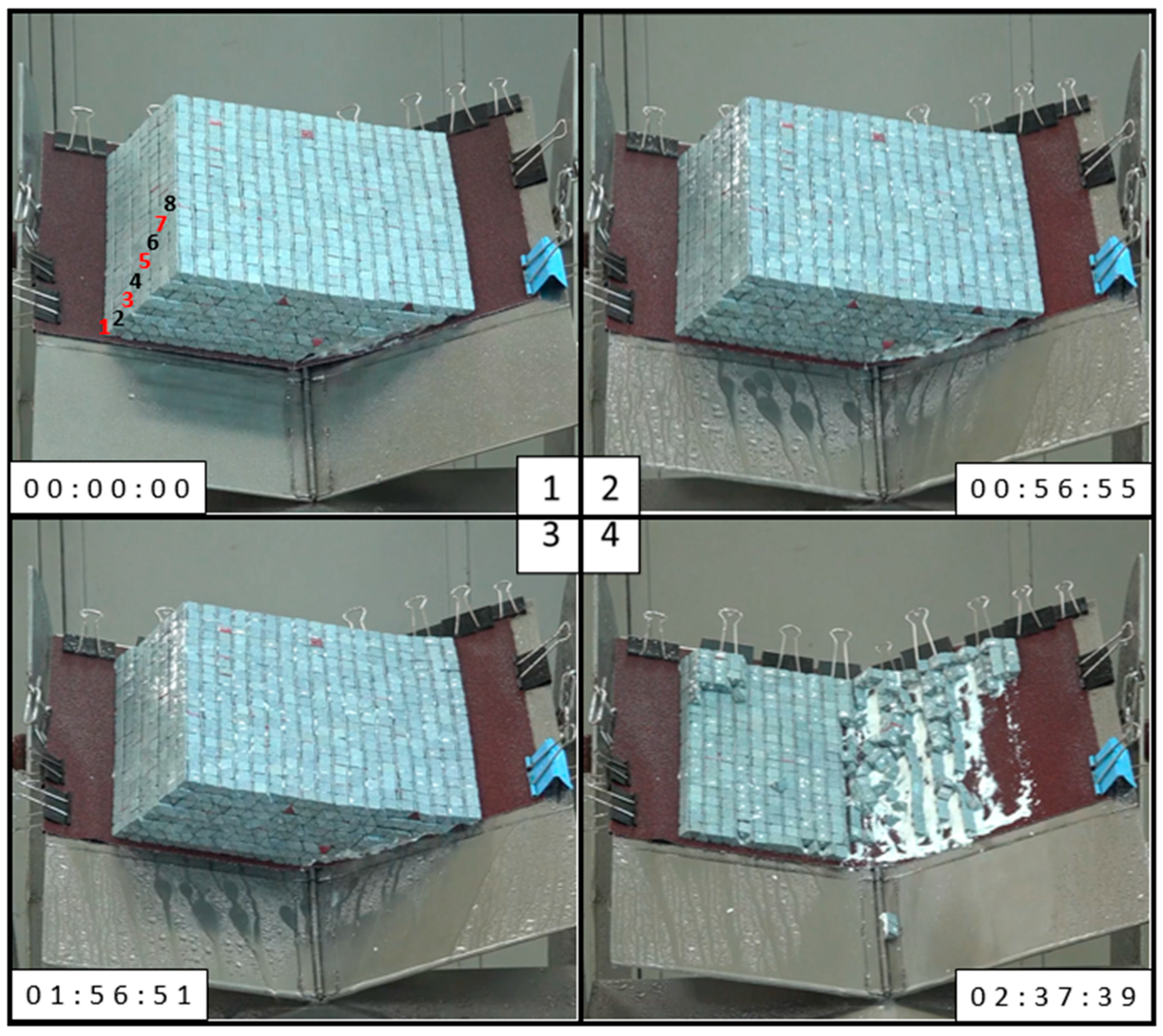
Figure 8). During the initial deformation stage (00:00:00–06:15:57), the model began to soften from the infiltrating surface water, and then, because of its own weight, began to deform, and some tension cracks appeared on the surface. Because of the progression of tension cracks, the daylighting of the slope toe at locations No. 8–10 caused some of the rock to fall. Because of the continued influence of surface water infiltration and gravity, the rock wedge slowly slid along the intersection line. Local tension crack development continued on the slope, accelerating the infiltration of surface water and weakening the strength of the rock. This stage is characterized by the sliding of the entire rock mass (06:15:58–08:26:51). As the duration of surface water infiltration increased, the resin at the bottom on the left and right plates gradually lost its shear strength. Ultimately, the entire rock wedge began to slide along the intersection line because of its own weight, and only 5% of the rock remained on the slope (08:26:52–10:53:51). The test conditions of model D (
ia = 40° and ω1 = ω2 = 75°) and model C were similar (
Figure 9), both ω1 and ω2 exceeded 50 degrees, and only the failure time of the test model was different. In the initial sliding stage (00:00:00–00:56:55), the model began to soften from the infiltrating surface water, and then, because of its own weight, the entire rock wedge began sliding toward the slope toe. As the surface water continued to infiltrate the rock wedge, the surface of the rock showed no apparent tension cracks. However, the strata in the oblique slope were inclined toward the left plate, which caused most of the surface water that had infiltrated the rock mass to flow through the strata on the right plate toward the left plate. Consequently, the rock on the right plate of the mode gradually weakened, resulting in twisting, deformation, and sliding (00:56:56–01:56:51). Then, the bottom of the rock wedge gradually lost its shear strength. Ultimately, the entire rock wedge began to slide along the intersection line and the two intersection planes because of its own weight, and only 10% of the rock remained on the slope (01:56:51–02:37:39).
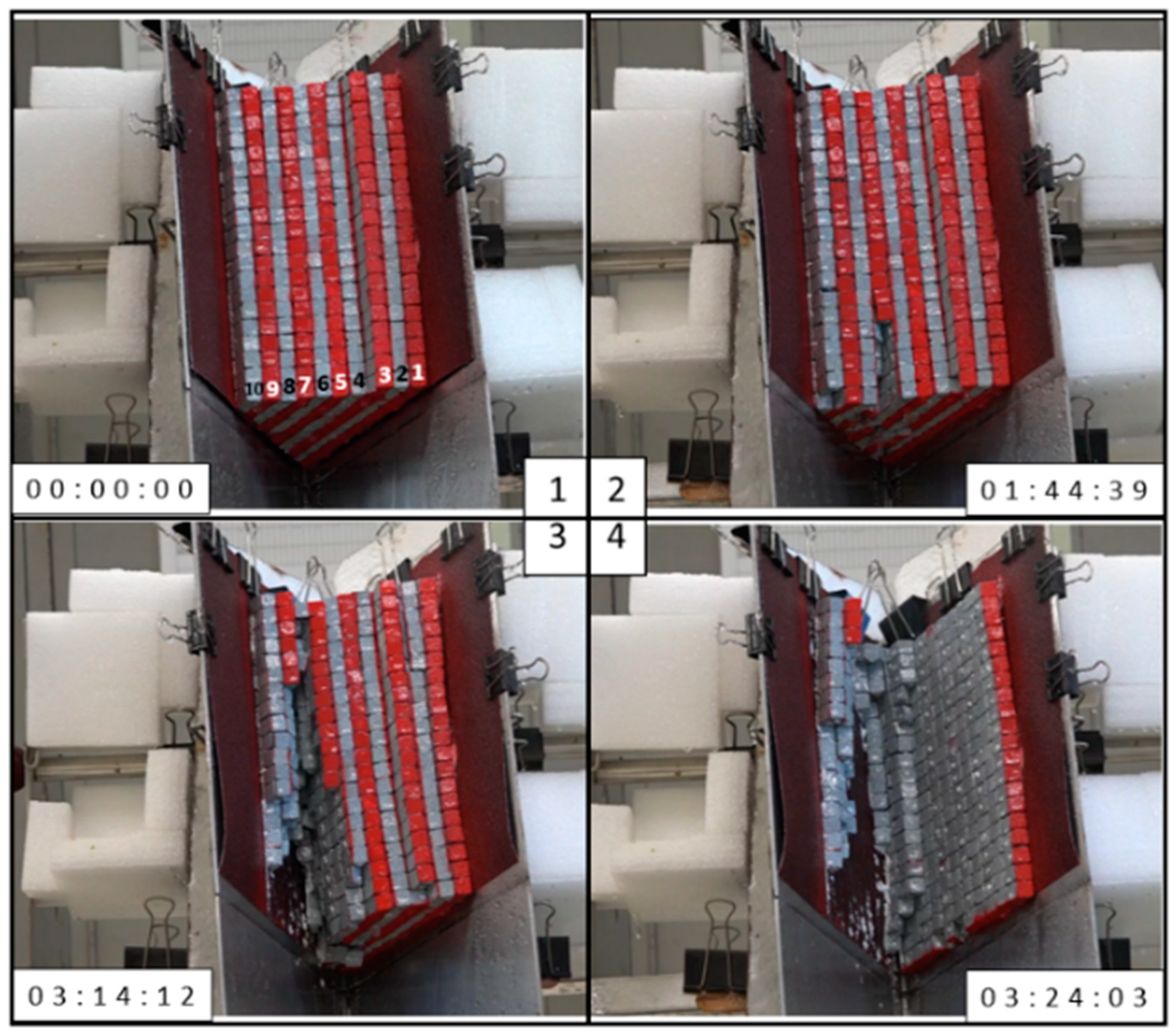
The primary conditions of Model E were
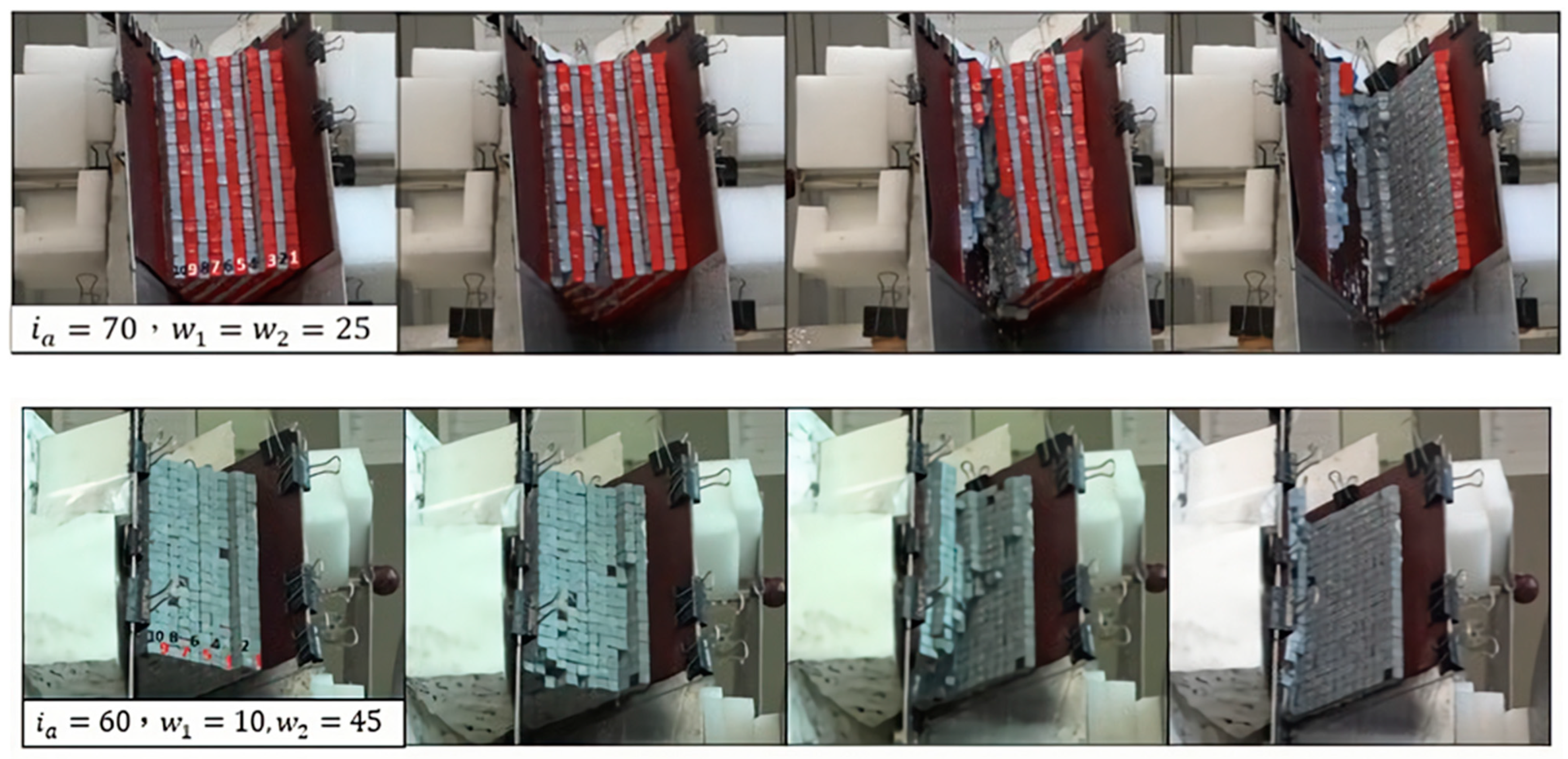
ia = 70° and ω1 = ω2 = 25°, and the duration of the test was 3 h 24 min 03 s (
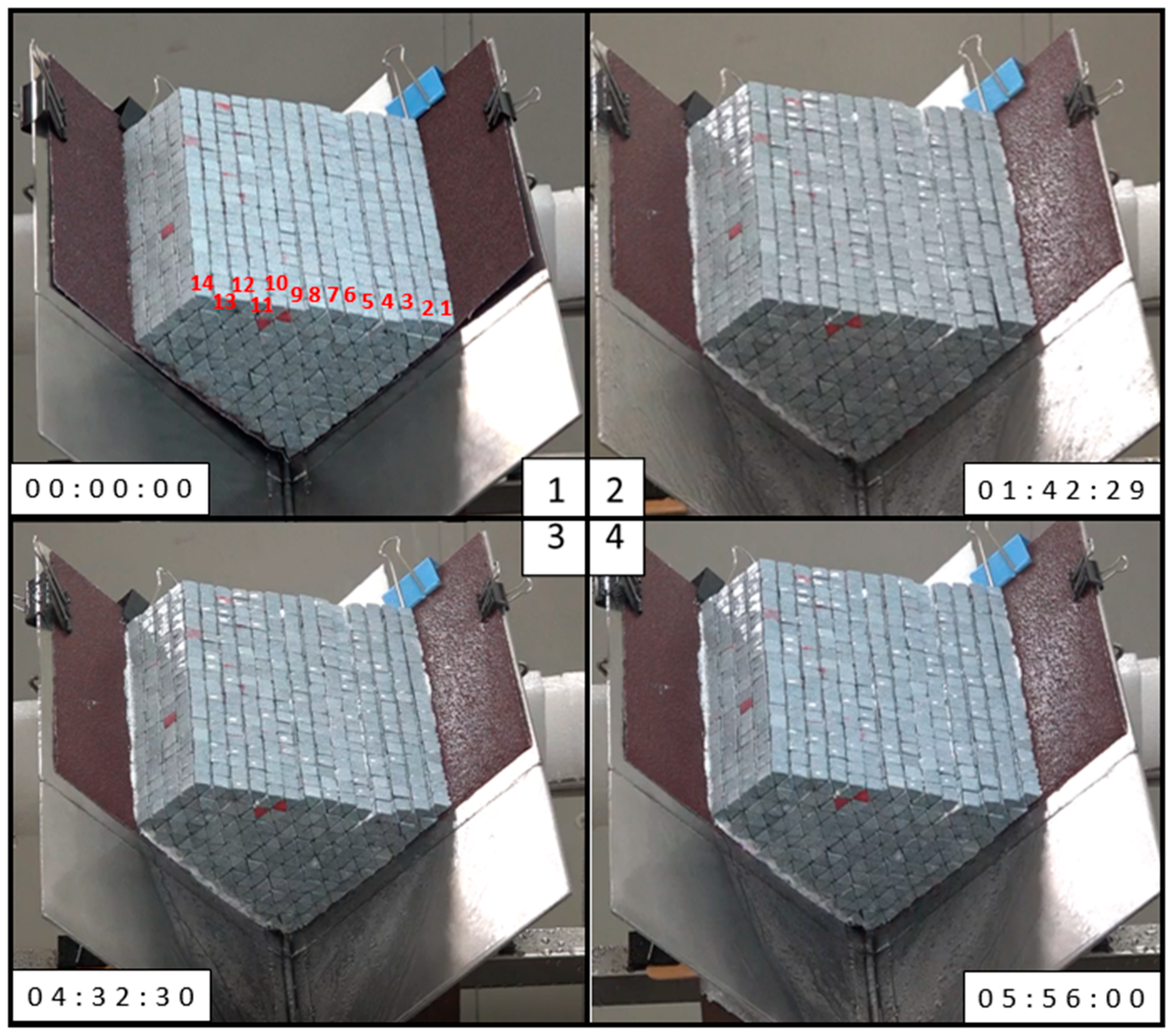
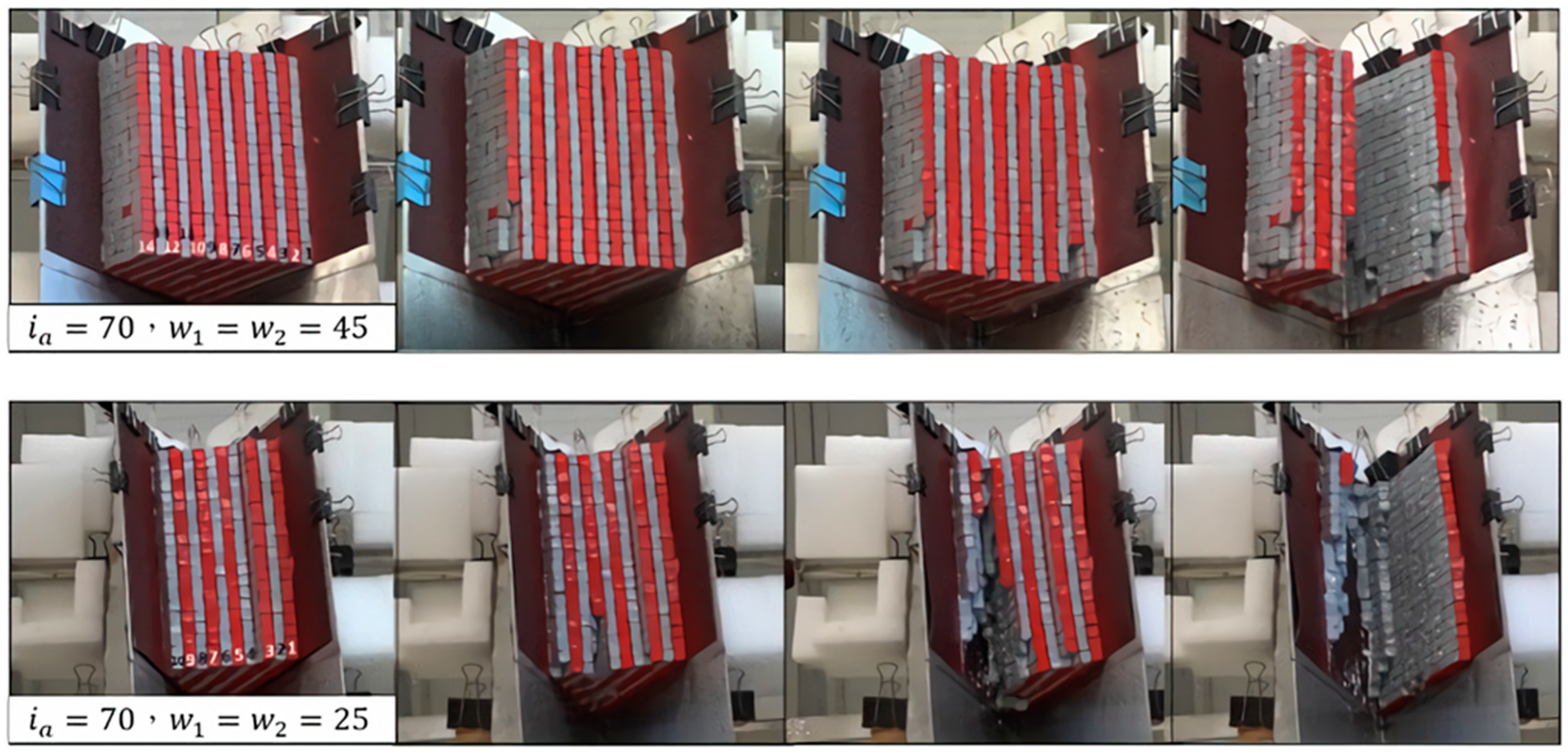
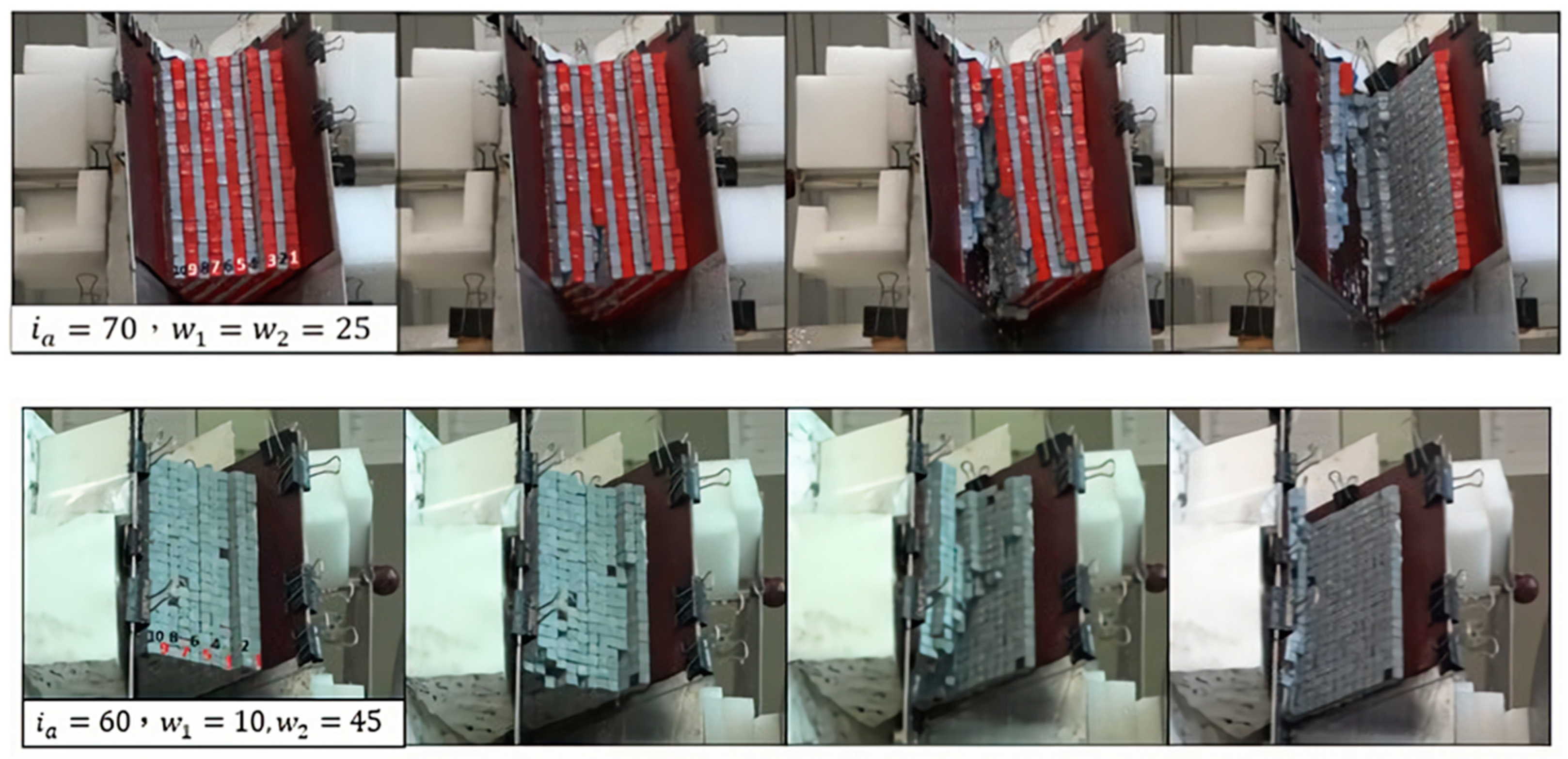
Figure 10). At the first stage (the initial deformation stage; 00:00:00–01:44:39), the model softened because of rainfall infiltration, and the greater intersection angle meant that gravity exerted a greater impact on the model. Significant deformation was observed after 20 min of rainfall. The weak planes in the oblique slope were inclined towards the right plate, and, as a result, soon after the surface water had infiltrated the model, the surface layer at the slope toe on the right plate (locations No. 7–10) showed local collapses and toppling failure. During the second stage (the local rock mass failure stage; 01:44:40–03:14:12), as some of the rock at the slope toe on the right plate collapsed, the rock on the right plate also became unstable, gradually resulting in wedge failure. Approximately 30% of the rock wedge slid and collapsed along the slope, greatly reducing the support below the rock mass on the right plate. Losing its support on the right, the entire rock wedge relied on the rock on the left plate and the intersection line for support. Then, as the duration of surface water infiltration increased, gravity and the weakening of the rock near the left led to gradual leaning and deformation. Subsequently, the rock in the back collapsed and toppled on a large scale along the intersection line, and only 5% of the rock remained on the slope. The duration of the Model F (
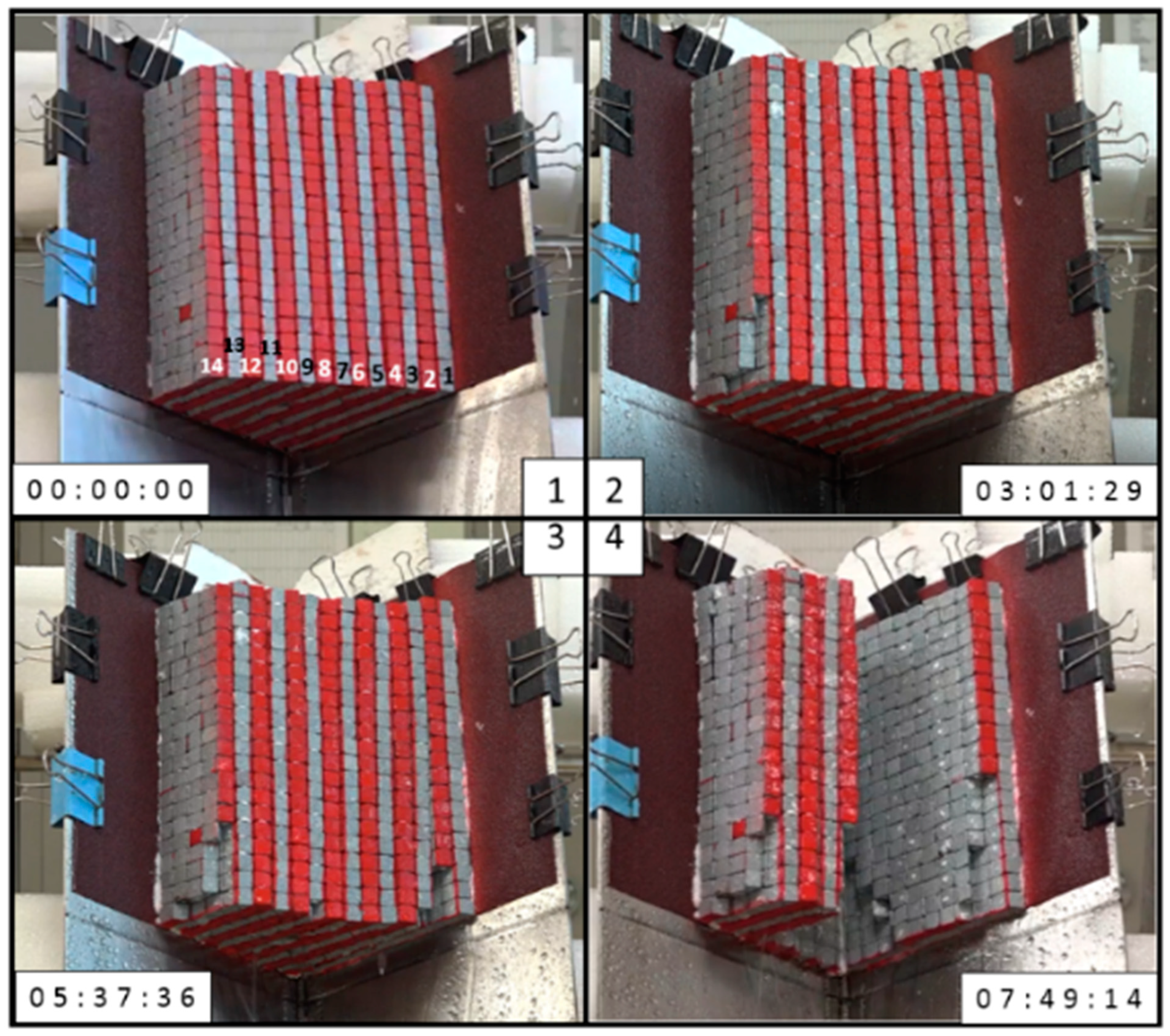
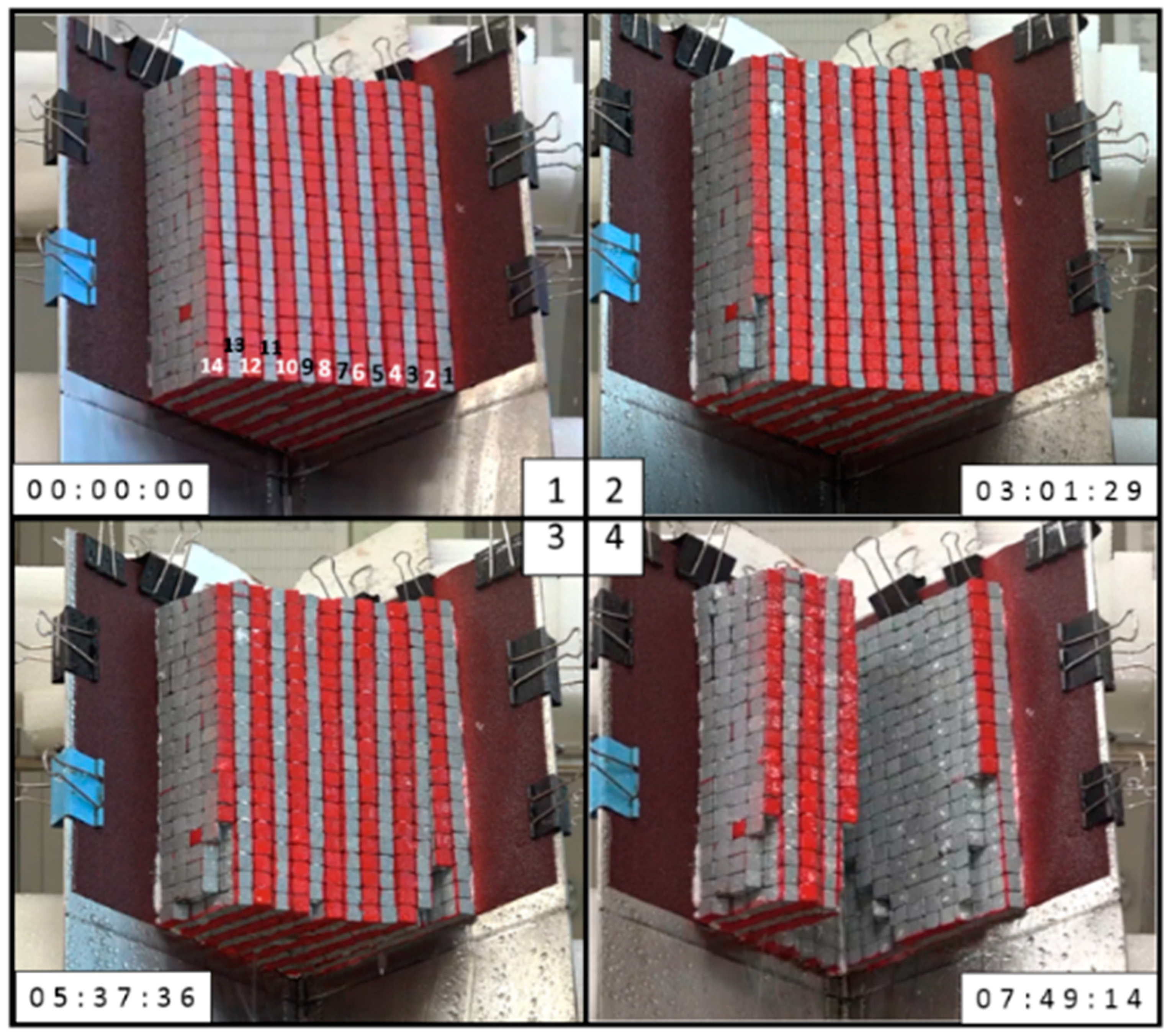
ia = 70° and ω1 = ω2 = 45°) test was 7 h 49 min 14 s (
Figure 11). At the first stage (the initial slope deformation stage; 0:00:00–1:30:44), the model softened because of surface water infiltration, and the greater intersection angle meant that gravity exerted a greater impact on the model. The model thus deformed and shifted toward the slope toe, and some of the rock at location No. 14 collapsed. The weak planes in the oblique slope were inclined towards the right plate, and the surface water could easily infiltrate and reach the weak places from above, resulting in weakening and failure on the surface on the right plate. At the local rock mass failure stage (1:30:45–5:37:36), rocks continued to fall at location No. 14. Because of gravity and surface water infiltration, the center of the model deformed and tilted forward. Local collapses were caused at locations No. 1–3, causing the deforming and forward-tilting slope toe at locations No. 3–9 to lose some of its support at the wings. After an hour of rainfall, the rock at locations No. 3–9 continued to deform and tilt forward. After four hours of rainfall, the forward-tilting rock became an independent mass on the verge of collapse. With the continuing infiltration of rainfall and the steep intersection angle, this mass eventually toppled. After the rock at locations No. 3–9 lost its support on the sides, the mass toppled. The remaining rock on the right plate also gradually toppled towards the intersection line, ultimately leaving only about 20% of the rock on the slope (5:37:37–07:49:14).
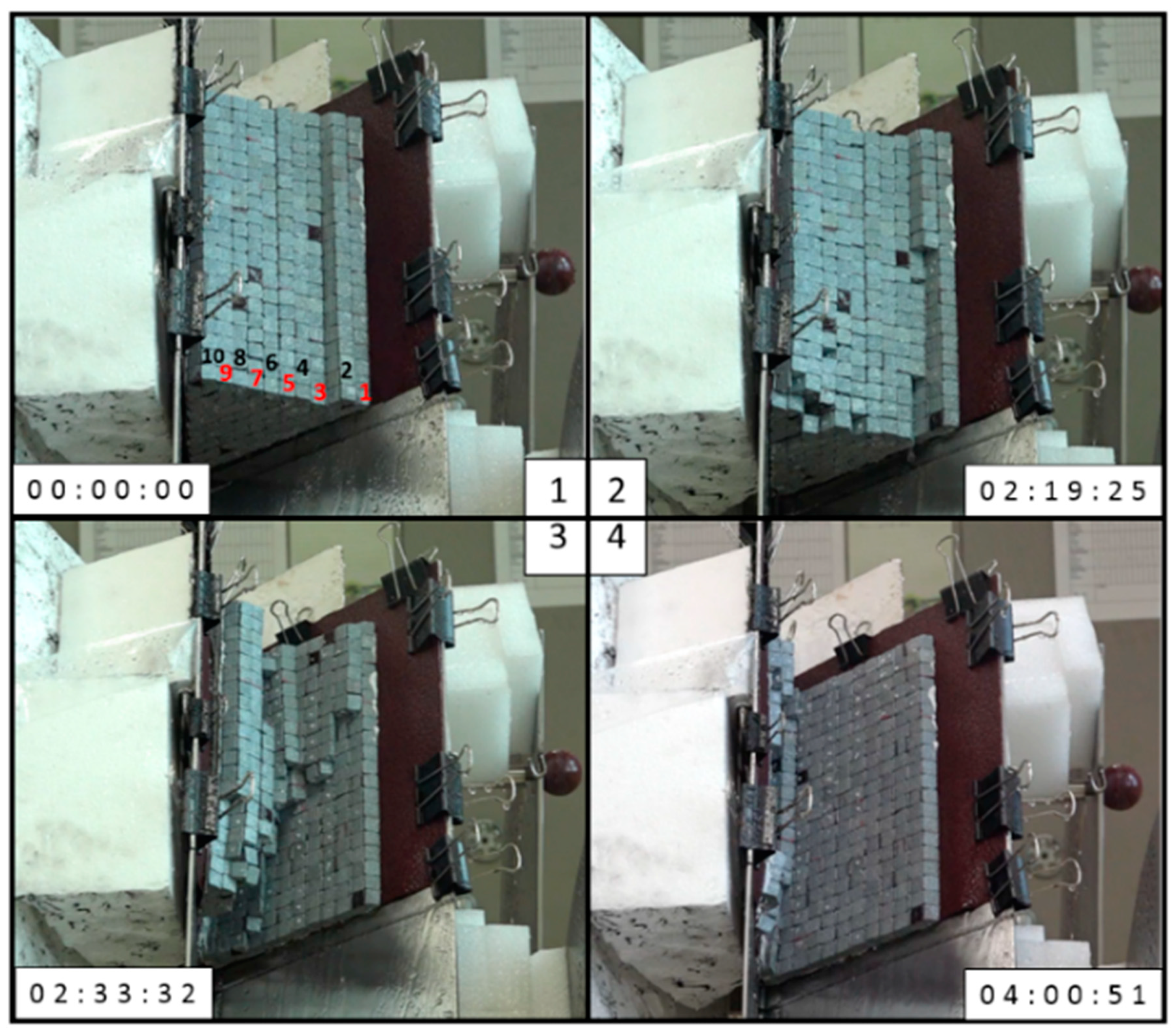
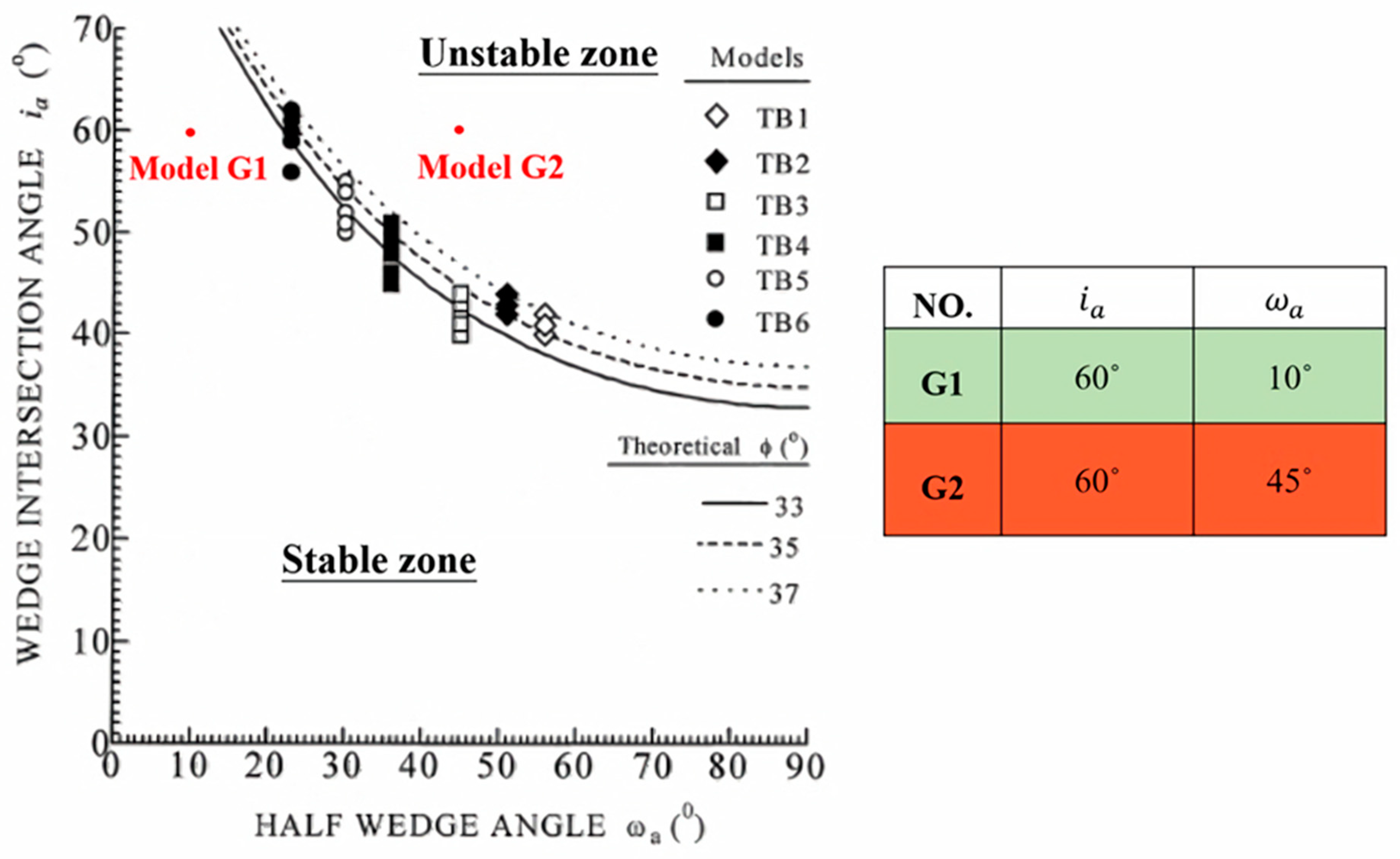
The primary conditions of Model G were
ia = 60°, ω1 = 40°, and ω2 = 10°, with two eccentric half-wedge angles, and the duration of the test was 3 h 24 min 03 s (
Figure 12). At the initial deformation stage under conditions of surface water infiltration (00:00:00–02:19:25), the model’s center of gravity was on the left plate (the side with a gentler slope), where ω was greater. In addition, the greater intersection angle meant that gravity exerted a greater impact on the model from the onset. As the surface water continued to infiltrate the model, it began to weaken and gradually deform and slide toward the toe on the left plate, leaving most of the rock on the left plate under compression, while most of the rock on the steep right plate was under tension. Before the midpoint of the test, rock continued to fall from the bottom of the model, resulting in local vertical torsion and displacement at locations No. 2 and No. 3. Weakened by water, the entire tock mass gradually slid and deformed. Next, the overall model reached the stage of local rock mass failure (02:19:26–02:33:32). Vertical torsion and displacement continued at locations No. 2 and No. 3 until tension cracks developed at location No. 8 (the cracks parallel to the intersection angle). The rock at locations No. 3–7 then lost its support on the sides, causing the rock mass to slide downwards along the intersection line, and only approximately 35% of the rock remained on the slope. The last stage is characterized by the rock wedge sliding and acceleration of the failure (02:33:33–04:00:51). After the collapse of the center rock mass, the rock at locations No. 9 and No. 10 remained on the slope. However, due to the loss of the rock on the intersection line, the rock remaining on the right plate gradually toppled toward the intersection line. The remainder of the rock was also softened by the infiltrating surface water and collapsed. Afterwards, approximately 15% of the rock remained on the right plate. The failure behaviors displayed by the entire rock wedge included sliding (gentle slope on left plate), collapsing, and toppling (steep slope on right plate).
5. Conclusions
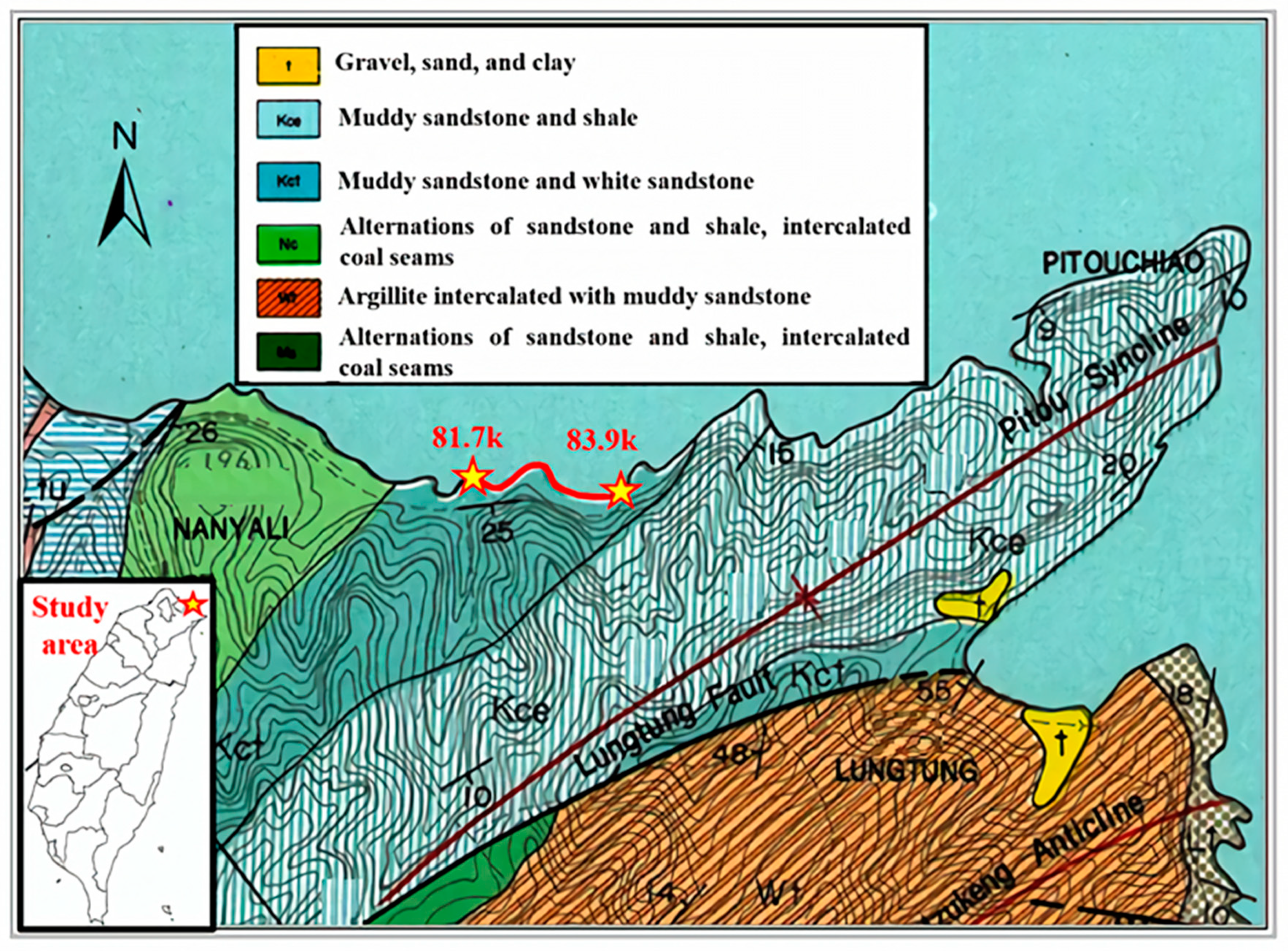
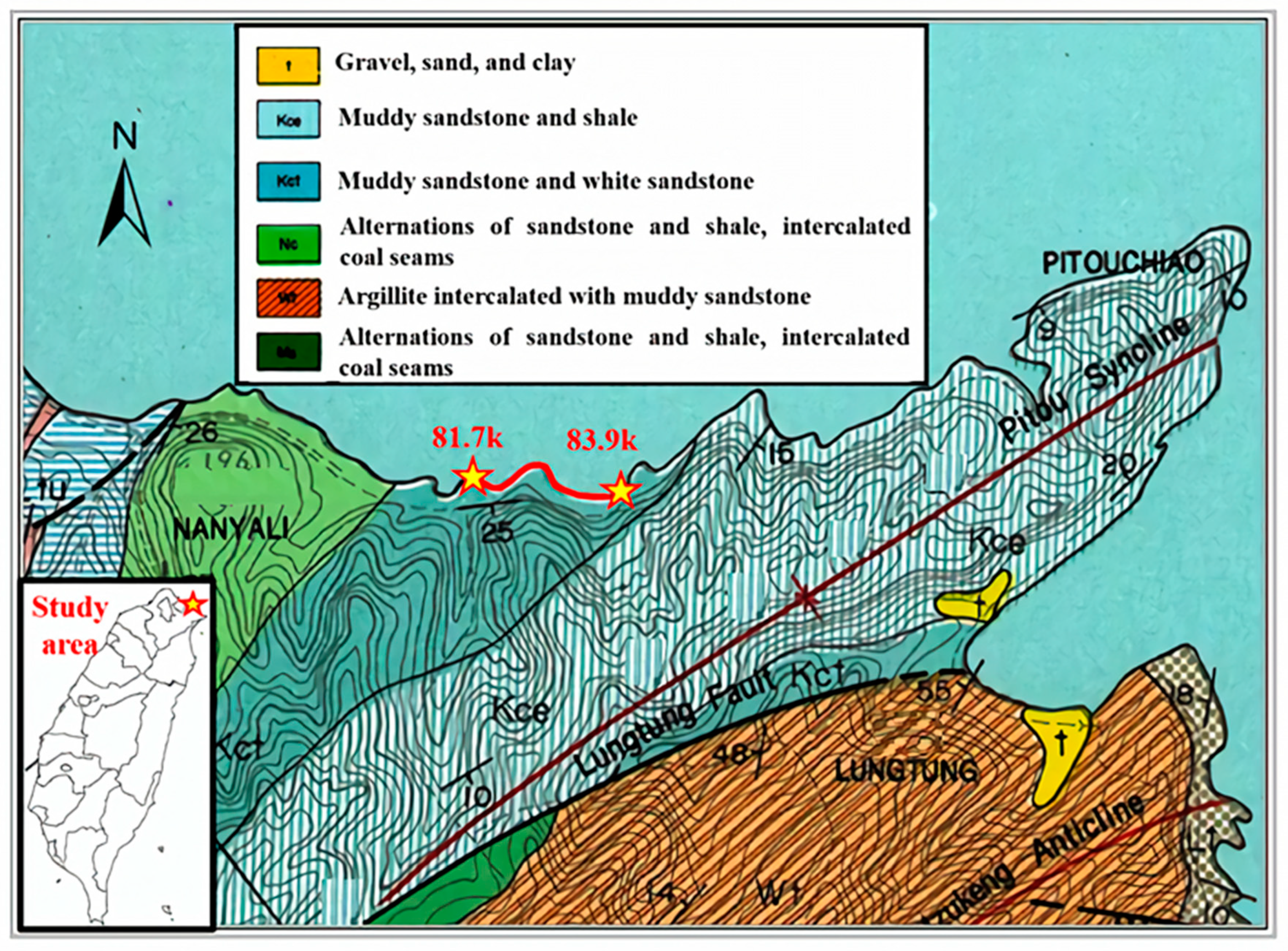
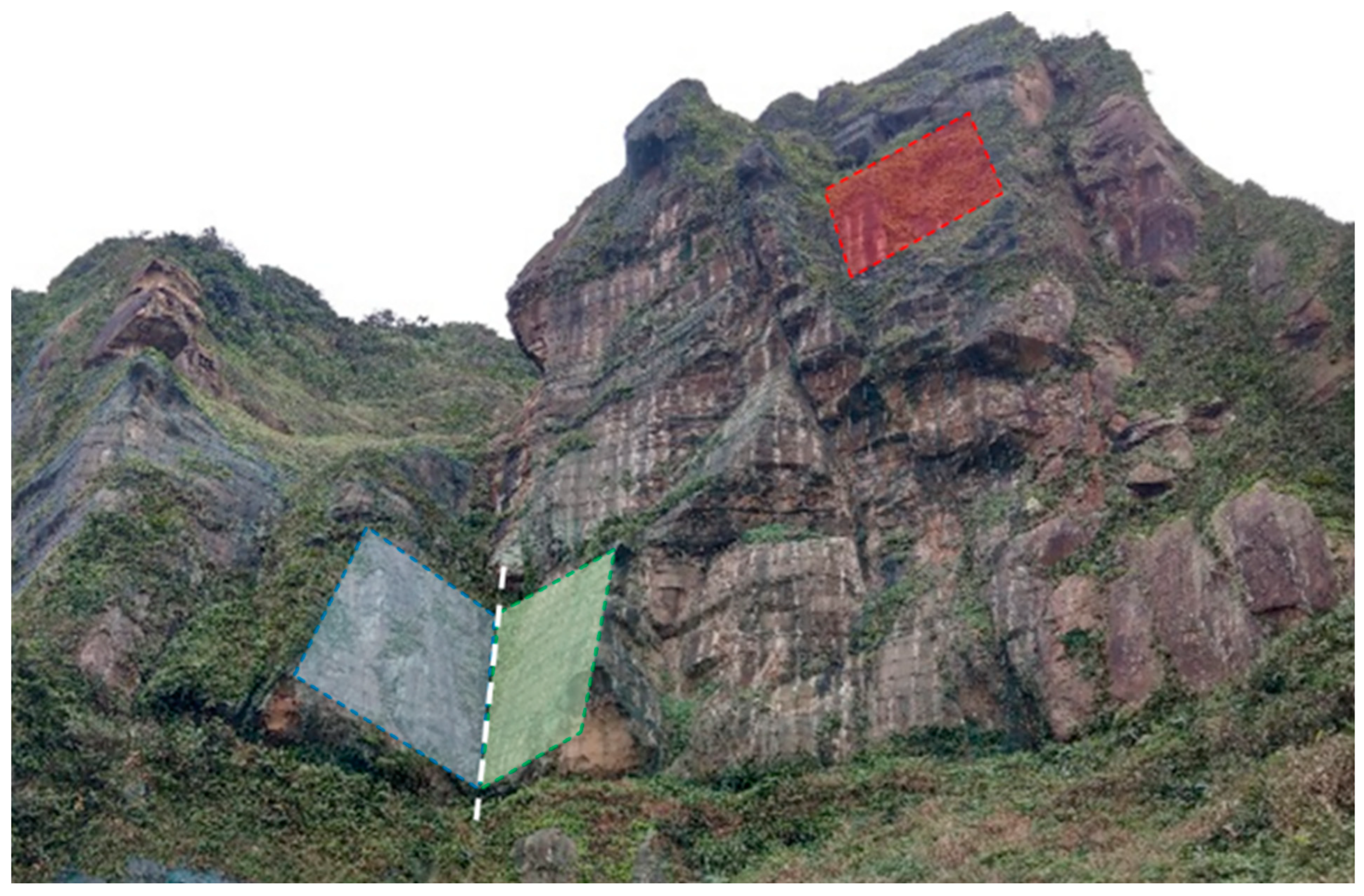
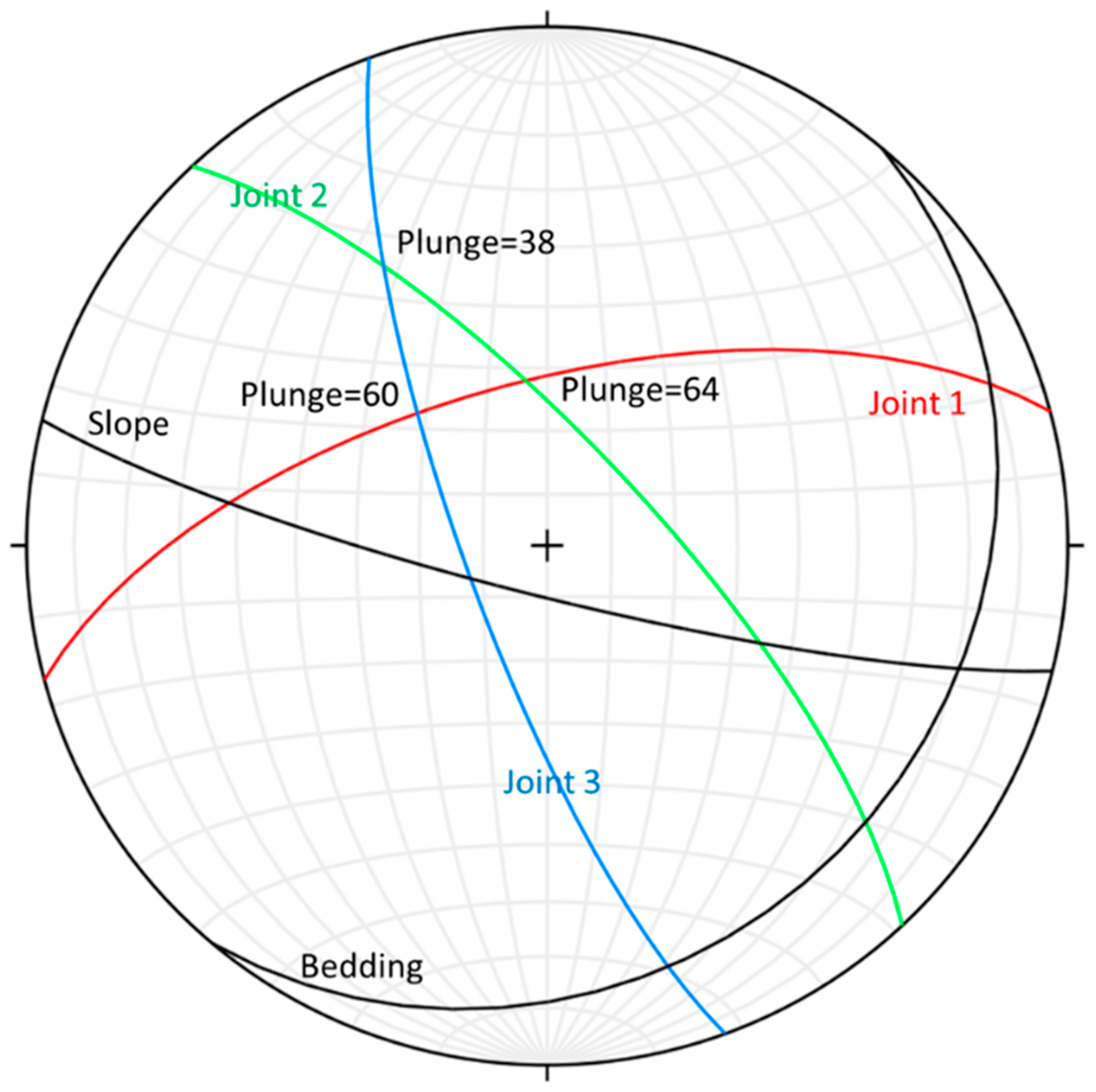
Our field surveys revealed that the wedge slopes along Provincial Highway No. 2 in Nanyali are mainly controlled by three sets of joints. Approximately 40% of the wedge slopes are controlled by Joints 2 and 3, and their intersection angles mostly range from 40° to 60°. We thus designed our physical models accordingly. The results of the physical tests revealed that most of the initial failure took place where the slope toe daylighted and that rockfalls or toppling were the most common. After some of the rock at the slope toe collapsed, tension cracks gradually developed toward the source, and surface water continued to infiltrate the rock mass via tension cracks, which weakened the shear strength within weak planes, reduced the overall stability of the rock wedge, and ultimately led to wedge failure.
The physical tests also revealed that ia had the greatest impact on overall rock wedge stability: ia less than 50° tended to result in sliding-type failure, and ia greater than 90° tended to result in toppling- or falling-type wedge failure. The variable with the second greatest impact was ω; when ω was less than 40°, forces on the rock mass from both sides produced progressive wedge failure characteristics. The failure began at the slope toe which the oblique slope was inclined towards and then gradually developed. Following local wedge failure, tension cracks formed in the rock above, and this cycle continued. The failure behavior resulting from ω greater than 45° was similar to that of planar rock sliding; there were fewer tension cracks, and the sliding mass was relatively whole. Most of the failure took place in deeper locations, thereby demonstrating that the characteristics of wedge failure are mostly controlled by ia and ω. Comparisons of the physical models and stability analysis models revealed that greater ω and ia increase the probability of wedge failure; however, existing stability formulas overlook the influence of rock material and continuous rainfall infiltration on wedge slope stability. This should be a focal point of future improvements to stability formulas. In wedge slopes where ω on the two slides of the slope differ, using the greater ω for stability analysis is the best approach.
Our results indicated that wedge slopes with ω less than 40° in Nanyali should be inspected for progressive wedge failure, and any tension cracks on the slope surface or wedge failure at the slope toe should be noted. Wedge slopes with ω greater than 45° should be inspected for slope toe daylighting to prevent large-scale wedge sliding. In eccentric wedge slopes (ω1 ≠ ω2), a greater ia means a greater chance of large-scale sliding on gentler slopes, which is important information for engineers.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}