
A Hybrid Coupled Model for Groundwater-Level Simulation and Prediction: A Case Study of Yancheng City in Eastern China


Abstract
:1. Introduction
2. Study Area and Methods
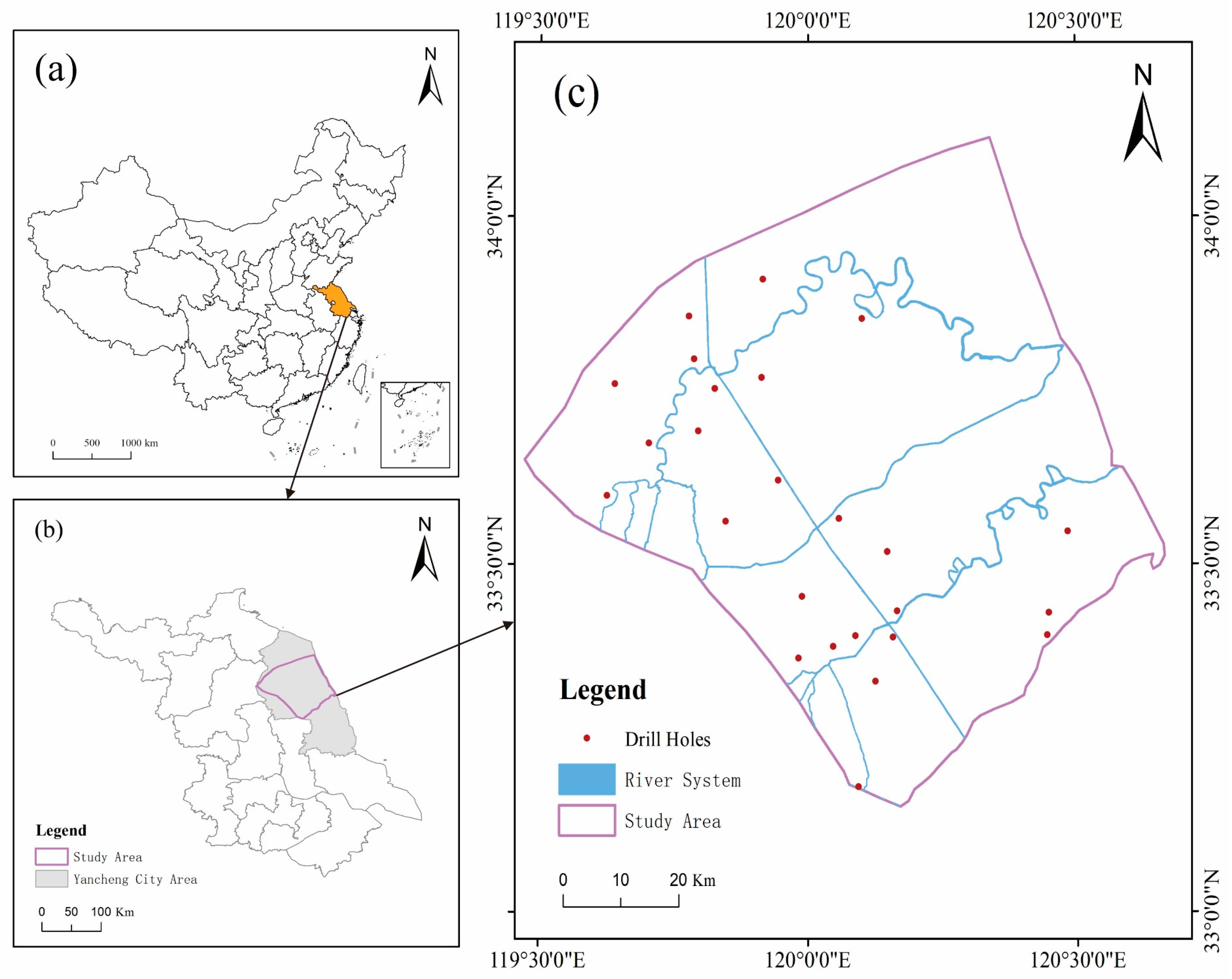
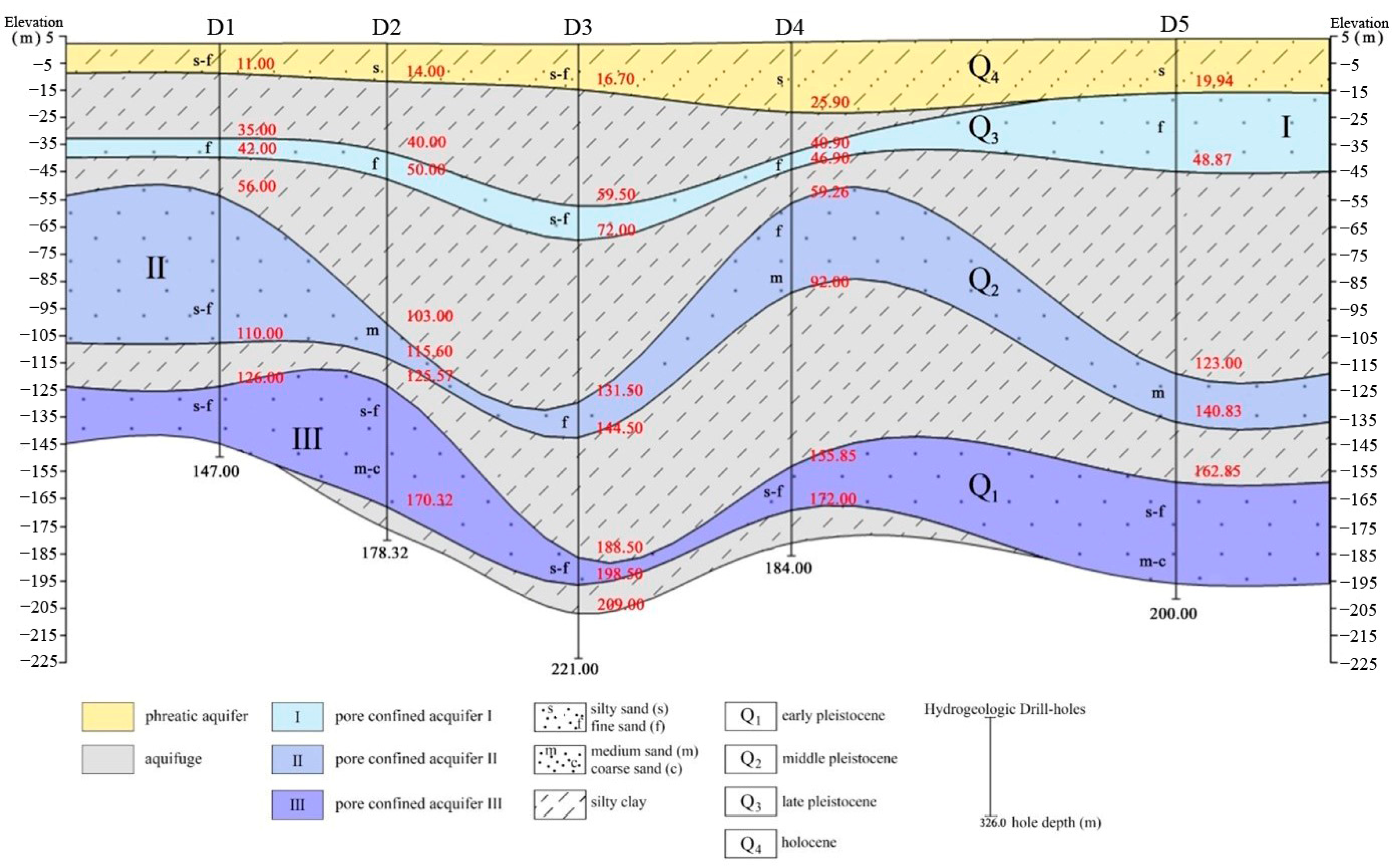
2.1. Overview of the Study Area
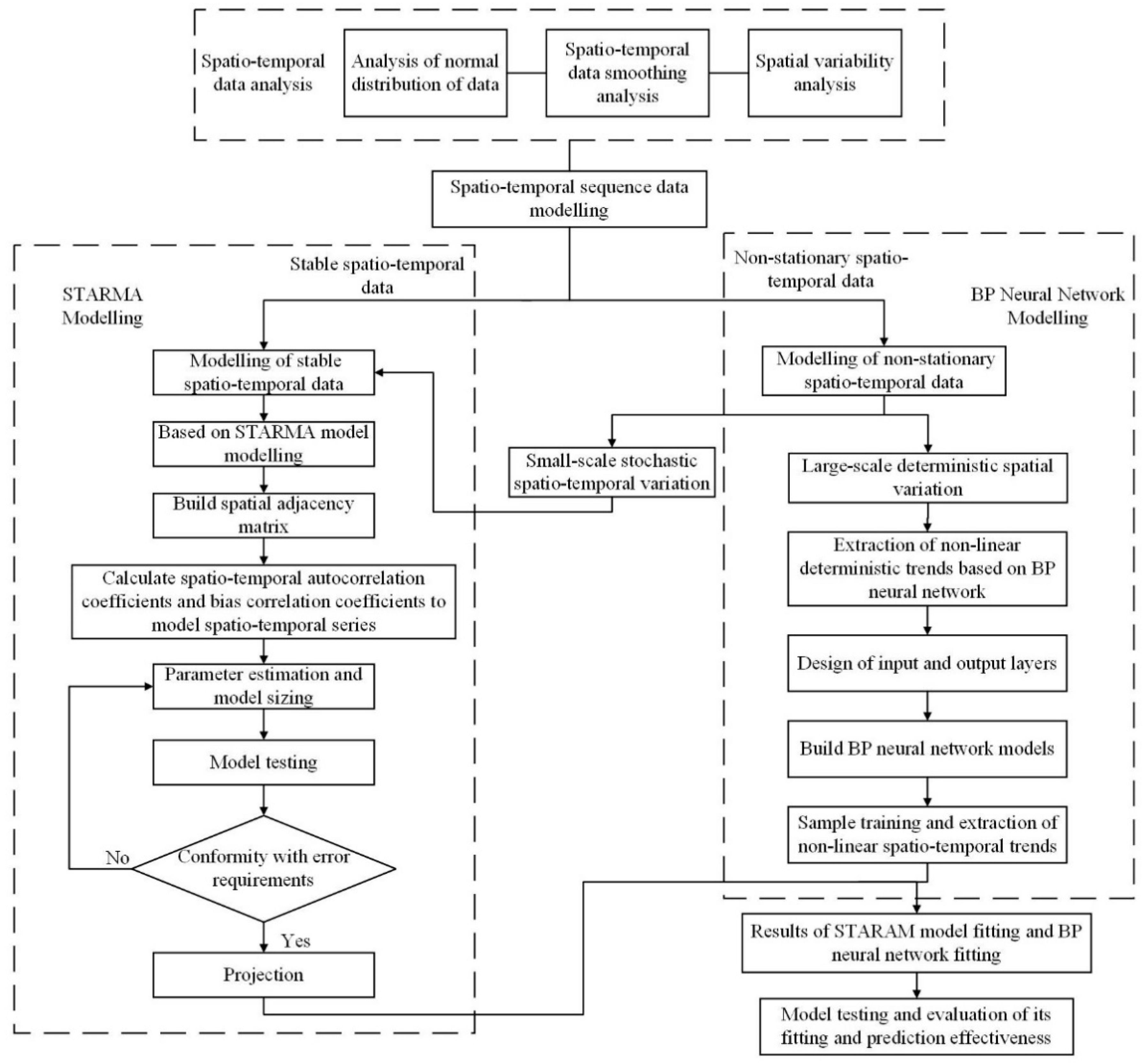
2.2. Data Analysis and Modeling Process
2.2.1. Spatiotemporal Data Analysis
- (1)
- Skewness coefficients, kurtosis coefficients, and non-parametric tests were used to determine whether the data were normally distributed. Analysis was performed using SPSS software(Version 21.0), and when the sample content n ≤ 2000, the results were based on the Shapiro–Wilk (W-test); when the sample content n > 2000, the results were based on the Kolmogorov–Smirnov (D-test). For unweighted or integer weights, the Shapiro–Wilk statistic was calculated when the weighted sample size was between 3 and 5000, while for single samples, the Kolmogorov–Smirnov test can be used to test whether the variables are normally distributed.
- (2)
- Time stationarity test [57]. This paper used the spatial trend analysis tool in ArcGIS to analyze the groundwater dynamic monitoring data in the study area as a trend surface to test the spatial smoothness; the test of temporal smoothness is mainly achieved through time series analysis. Time series analysis means that the time series is regarded as a random process that does not vary with time [58]. For a time series , the expression for the mean is
- (3)
- Spatial variability analysis uses semi-variance functions to analyze spatial data. The semi-variance function , also known as the semi-variance function, is expressed as half of the variable between at points i and i + h and with the expression
2.2.2. STARMA Modeling
- (1)
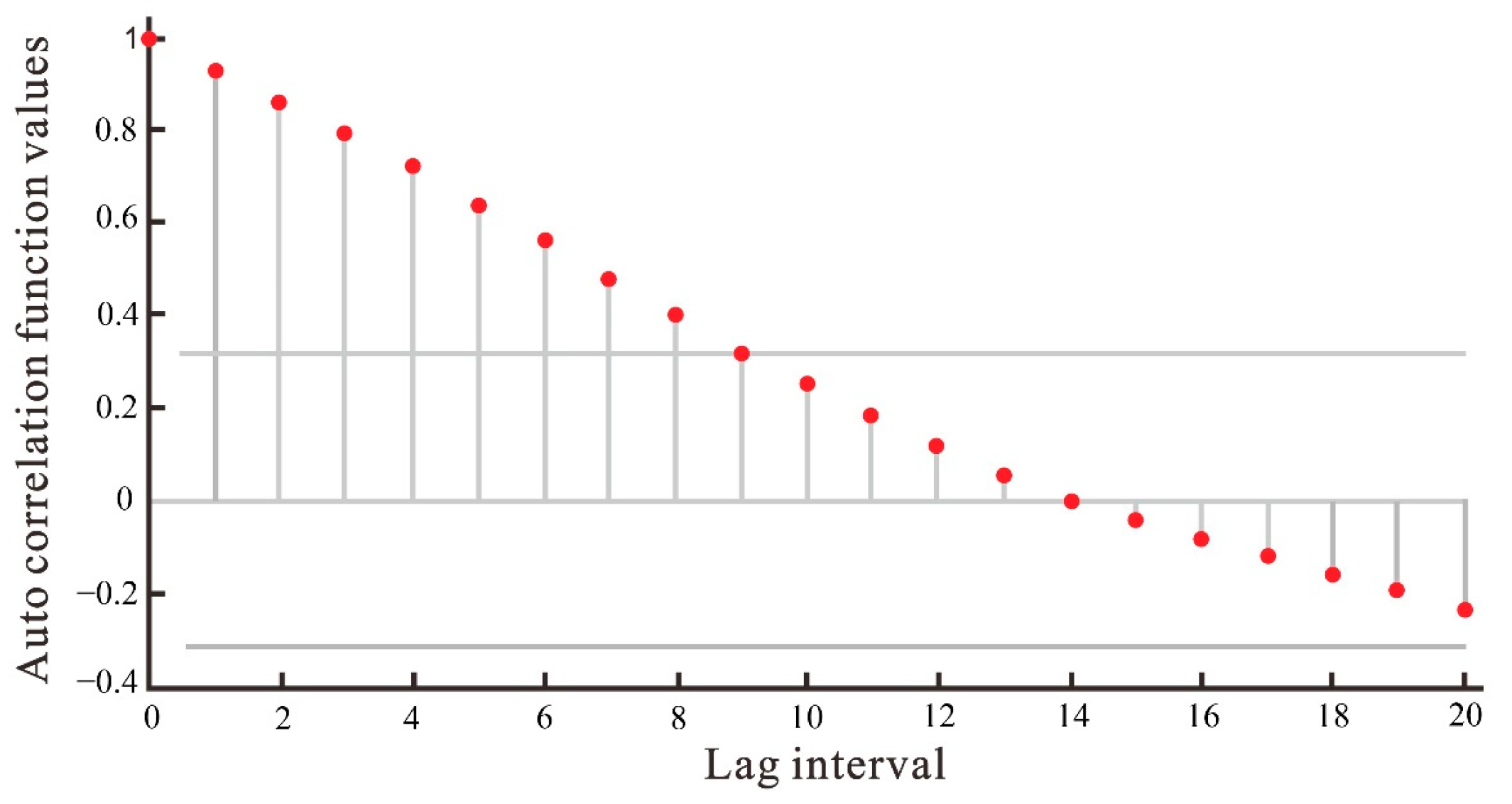
- The identification of the model is based on the truncated or trailing nature of its space–time autocorrelation function (STACF) and space–time partial autocorrelation function (STPACF). In this paper, based on the autocorrelation and bias correlation coefficients on the spatiotemporal data, the model chosen was identified as the spatiotemporal autocorrelation model STAR (2), with the specific expression
- (2)
- Estimation of the parameters in the model is carried out using the least-squares and greatest likelihood methods. That is, in order to make the model output value as close as possible to the actual monitoring value, the sum of squares of the error between the model output value and the actual monitoring value are used to measure, and the parameter value with the smallest sum of squares is the parameter value of the model.
- (3)
- Model validation. The residual sequence of the model is tested to determine whether it is a random error. If the residual of the model is random error—that is, the mean and auto-covariance of the model residual are 0, and the variance is σ2—then the model is reasonable; otherwise, the selected model is unreasonable, which means that there is a certain pattern in the residual sequence—that is, there is a certain correlation or variability in space–time. If the selected model is unreasonable, it means that there is still some important information in the original space–time sequence that has not been extracted, and then the model and parameter estimation need to be re-selected.
2.2.3. BP Neural Network Model Building
2.2.4. BP-STARMA Model Building
3. Results and Discussion
3.1. Data Processing and Analysis
3.1.1. Monitoring Data Processing
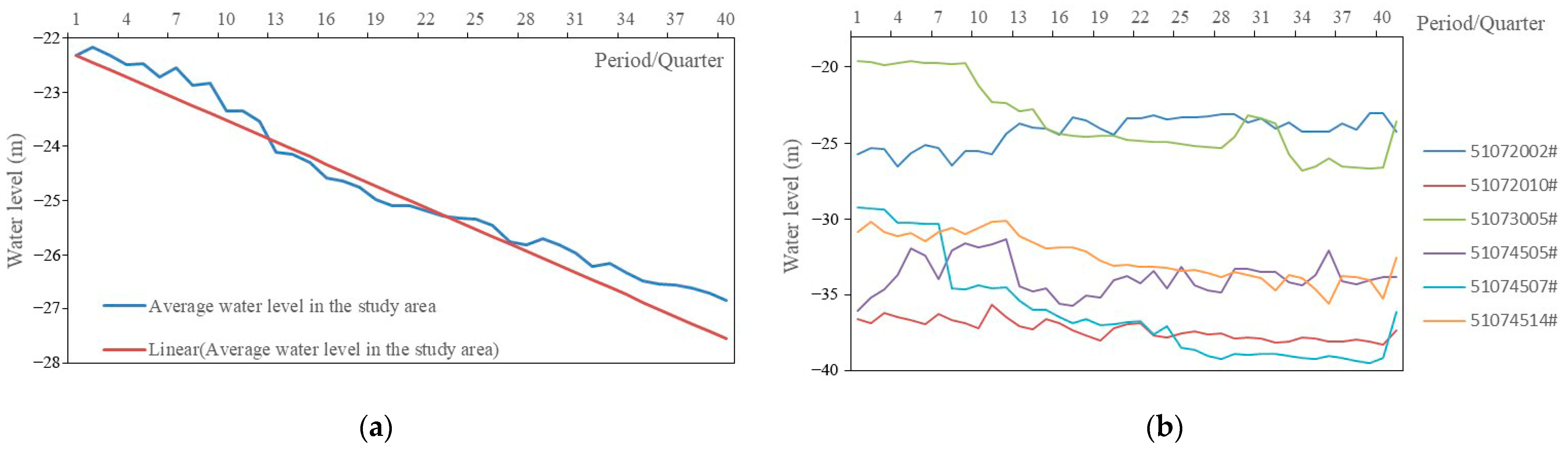
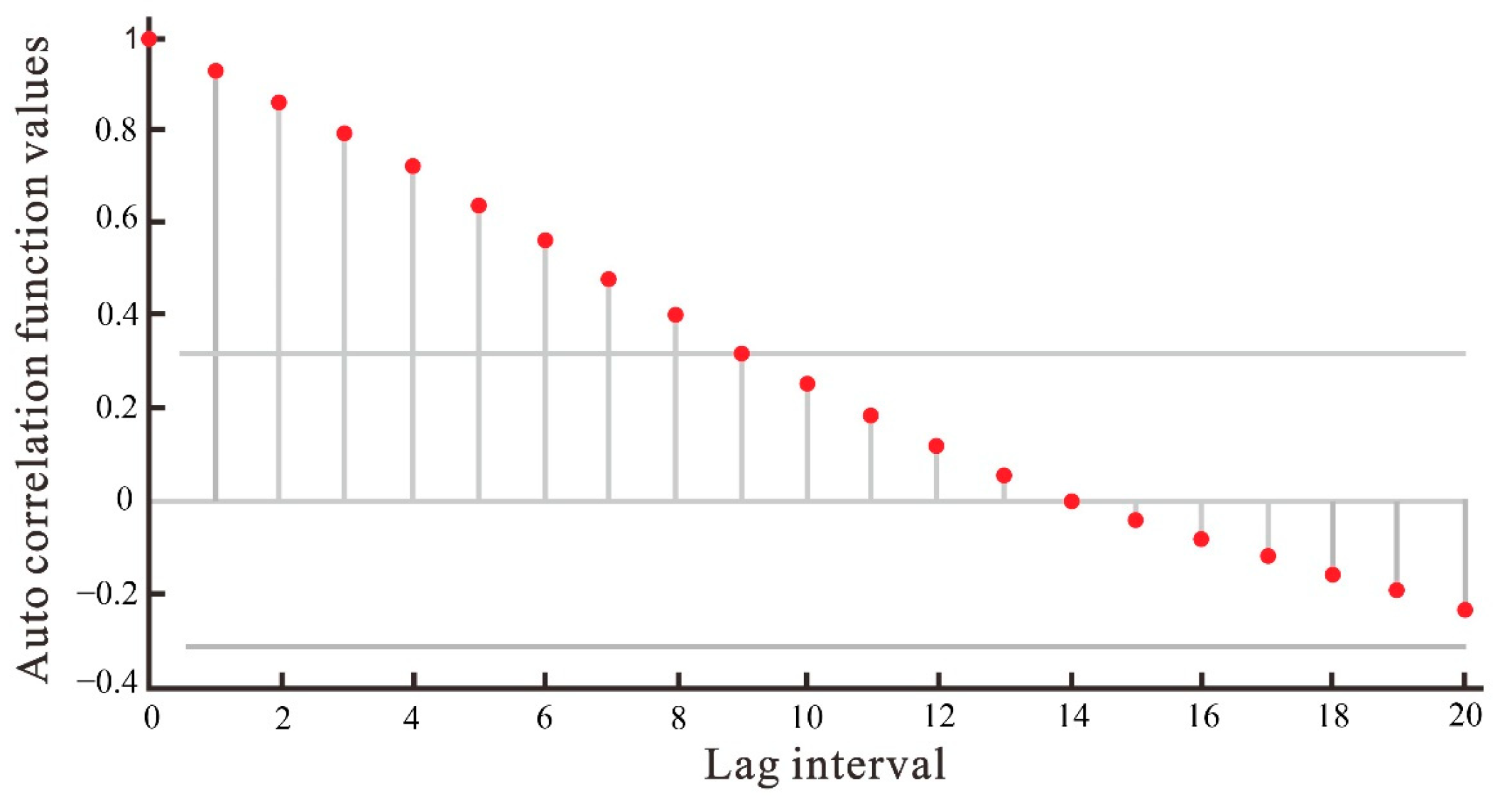
3.1.2. Data Analysis
3.2. BP-STARMA Model Building
3.2.1. BP Neural Network to Extract Nonlinear Spatiotemporal Trends
3.2.2. STARMA Modeling
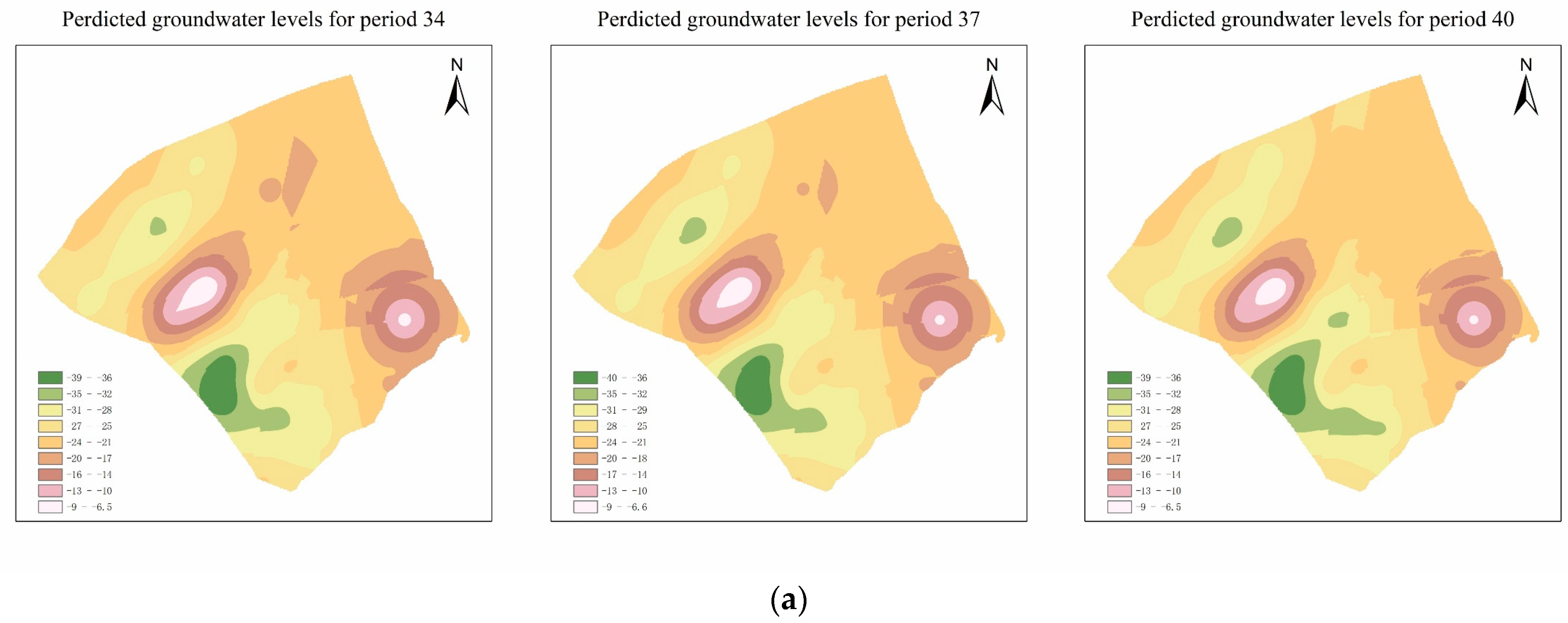
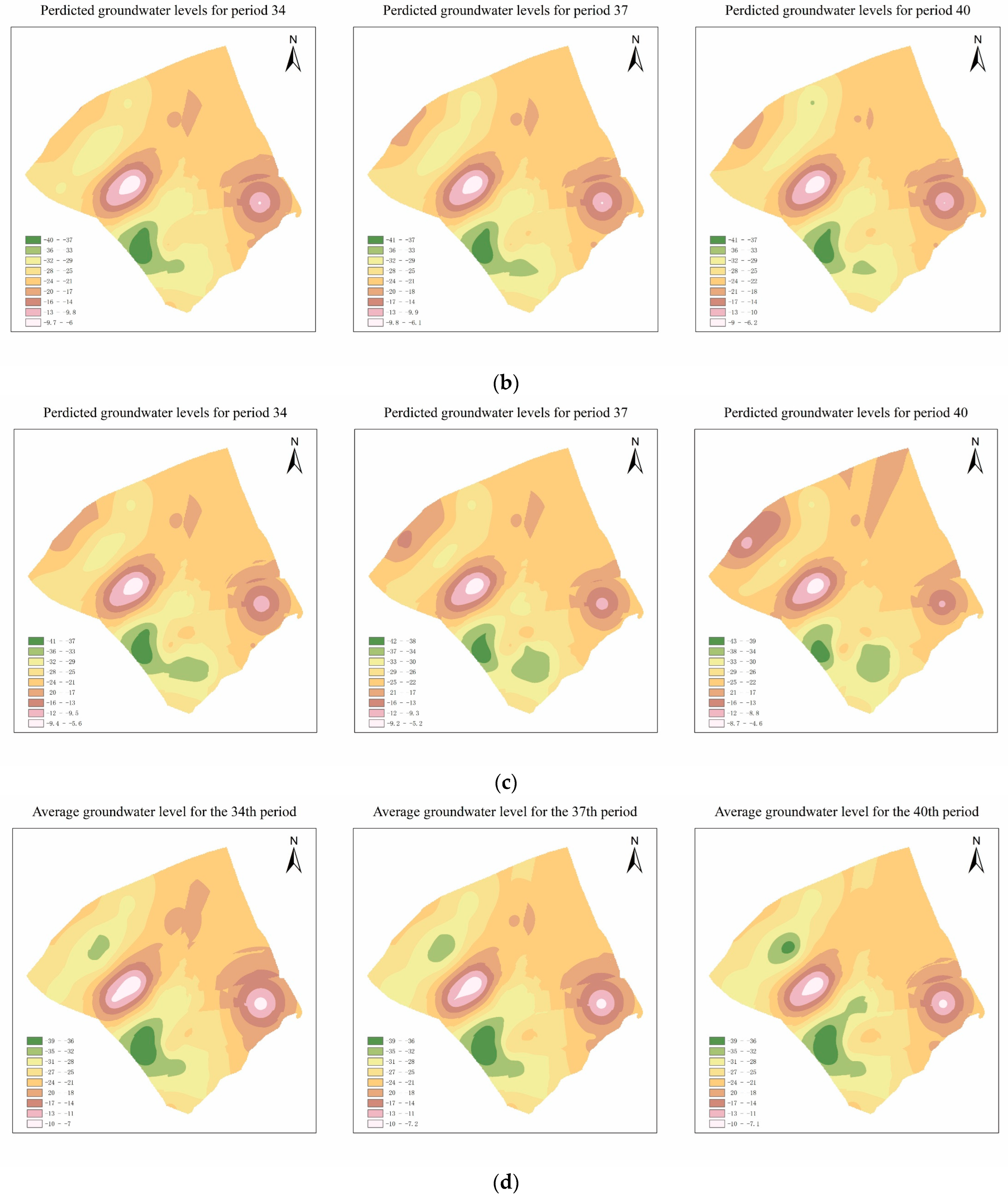
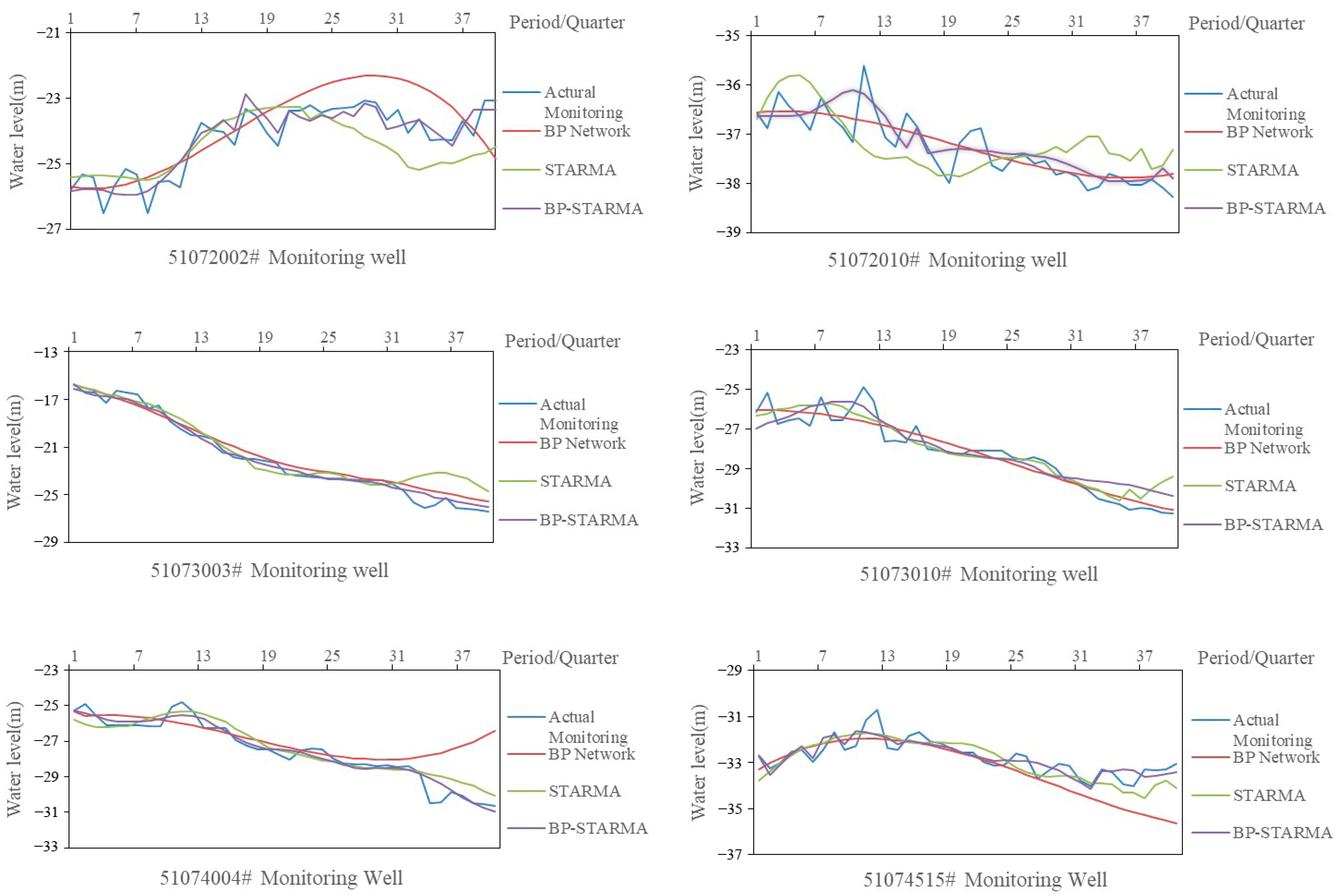
3.3. Comparison of Model Prediction Accuracy
3.4. Evaluation and Comparison of Comprehensive Model Performance
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nourani, V.; Mousavi, S. Spatiotemporal groundwater level modeling using hybrid artificial intelligence-meshless method. J. Hydrol. 2016, 536, 10–25. [Google Scholar] [CrossRef]
- Sattari, M.T.; Mirabbasi, R.; Sushab, R.S.; Abraham, J. Prediction of Groundwater Level in Ardebil Plain Using Support Vector Regression and M5 Tree Model. Ground Water 2018, 56, 636–646. [Google Scholar] [CrossRef]
- Chen, W.; Li, H.; Hou, E.K.; Wang, S.; Wang, G.; Panahi, M.; Li, T.; Peng, T.; Guo, C.; Niu, C.; et al. GIS-based groundwater potential analysis using novel ensemble weights-of-evidence with logistic regression and functional tree models. Sci. Total Environ. 2018, 634, 853–867. [Google Scholar] [CrossRef] [Green Version]
- Yoon, H.; Kim, Y.; Lee, S.H.; Ha, K. Influence of the range of data on the performance of ANN- and SVM-based time series models for reproducing groundwater level observations. Acque Sotter. Ital. J. Groundw. 2019, 8, 17–21. [Google Scholar] [CrossRef]
- Rahmati, O.; Falah, F.; Naghibi, S.A.; Biggs, T.; Soltani, M.; Deo, R.C.; Cerdà, A.; Mohammadi, F.; Bui, D.T. Land subsidence modelling using tree-based machine learning algorithms. Sci. Total Environ. 2019, 672, 239–252. [Google Scholar] [CrossRef]
- Rahmati, O.; Golkarian, A.; Biggs, T.; Keesstra, S.; Mohammadi, F.; Daliakopoulos, I. Land subsidence hazard modeling: Machine learning to identify predictors and the role of human activities. J. Environ. Manag. 2019, 236, 466–480. [Google Scholar] [CrossRef] [PubMed]
- Conway, B.D. Land subsidence and earth fissures in south-central and southern Arizona, USA. Hydrogeol. J. 2016, 24, 649–655. [Google Scholar] [CrossRef]
- Gao, M.S.; Luo, Y.M. Change of groundwater resource and prevention and control of seawater intrusion in coastal zone. Bull. Chin. Acad. Sci. 2016, 31, 1197–1203. (In Chinese) [Google Scholar]
- Chen, S.M.; Liu, H.W.; Liu, F.T.; Miao, J.J.; Guo, X.; Zhang, Z.; Jiang, W.J. Using time series analysis to assess tidal effect on coastal groundwater level in Southern Laizhou Bay, China. J. Groundw. Sci. Eng. 2022, 10, 292–301. [Google Scholar]
- Mohanty, S.; Jha, M.K.; Kumar, A.; Sudheer, K.P. Artificial Neural Network Modeling for Groundwater Level Forecasting in a River Island of Eastern India. Water Resour. Manag. 2010, 24, 1845–1865. [Google Scholar] [CrossRef]
- Zou, J.; Xie, Z.; Zhan, C.; Qin, P.; Sun, Q.; Jia, B.; Xia, J. Effects of anthropogenic groundwater exploitation on land surface processes: A case study of the Haihe River Basin, northern China. J. Hydrol. 2015, 524, 625–641. [Google Scholar] [CrossRef]
- Abdollahi, S.; Pourghasemi, H.R.; Ghanbarian, G.A.; Safaeian, R. Prioritization of effective factors in the occurrence of land subsidence and its susceptibility mapping using an SVM model and their different kernel functions. Bull. Eng. Geol. Environ. 2019, 78, 4017–4034. [Google Scholar] [CrossRef]
- Natarajan, N.; Sudheer, C. Groundwater level forecasting using soft computing techniques. Neural Comput. Appl. 2020, 32, 7691–7708. [Google Scholar] [CrossRef]
- Liu, Y.J. The establishment and application of dynamic prediction model of groundwater level based on intelligent algorithm. Hydrogeol. Eng. Geol. 2004, 31, 55–56. [Google Scholar]
- Zhang, W.G.; Huang, Q.; Tong, C.S. Dynamic Prediction of Groundwater Level based on Chaos Optimization and Support Vector Machine. Resour. Sci. 2007, 29, 105–109. (In Chinese) [Google Scholar]
- Xu, J.; Chen, Y.; Li, W. Using GM (1,1) models to predict groundwater level in the lower reaches of Tarim River: A demonstration at Yingsu section. In Proceedings of the 2008 Fifth International Conference on Fuzzy Systems and Knowledge Discovery, Jinan, China, 18–20 October 2008; pp. 668–672. [Google Scholar]
- Fu, Z.; Liu, J.; Li, L.; Kong, M. Application of Artificial Neural Network in Dynamic Prediction of Groundwater Level in Weibei Irrigation Area. Bull. Soil Water Conserv. 2008, 4, 144–146. (In Chinese) [Google Scholar]
- Mohammad, R.; Ebadi, T.; Maknoun, R. Development of a smart model for groundwater level prediction based on aquifer dynamic condictions. Water Wastewater Winter 2011, 21, 70–80. [Google Scholar]
- Zhang, H.F. Overview on Groundwater Dynamic Prediction Model. Ground Water 2016, 1, 68–70. (In Chinese) [Google Scholar]
- Mohanty, S.; Jha, M.K.; Raul, S.K.; Panda, R.K.; Sudheer, K.P. Using Artificial Neural Network Approach for Simultaneous Forecasting of Weekly Groundwater Levels at Multiple Sites. Water Resour. Manag. 2015, 29, 5521–5532. [Google Scholar] [CrossRef]
- Lee, S.; Lee, K.K.; Yoon, H. Using artificial neural network models for groundwater level forecasting and assessment of the relative impacts of influencing factors. Hydrogeol. J. 2018, 27, 567–579. [Google Scholar] [CrossRef]
- Jeong, J.; Park, E. Comparative Applications of Data-Driven Models Representing Water Table Fluctuations. J. Hydrol. 2019, 572, 261–273. [Google Scholar] [CrossRef]
- Eriksson, E. Groundwater Time Series. Hydrol. Res. 1970, 1, 181–205. [Google Scholar] [CrossRef]
- Upton, K.A.; Jackson, C.R. Simulation of the spatio-temporal extent of groundwater flooding using statistical methods of hydrograph classification and lumped parameter models. Hydrol. Process. 2011, 25, 1949–1963. [Google Scholar] [CrossRef] [Green Version]
- Jha, M.K.; Sahoo, S. Efficacy of neural network and genetic algorithm techniques in simulating spatio-temporal fluctuations of groundwater. Hydrol. Process. 2015, 29, 671–691. [Google Scholar] [CrossRef]
- Ebrahimi, H.; Rajaee, T. Simulation of groundwater level variations using wavelet combined with neural network, linear regression and support vector machine. Glob. Planet. Chang. 2017, 148, 181–191. [Google Scholar] [CrossRef]
- Nourani, V.; Ejlali, R.G.; Alami, M.T.; Aalami, M.T. Spatiotemporal Groundwater Level Forecasting in Coastal Aquifers by Hybrid Artificial Neural Network-Geostatistics Model: A Case Study. Environ. Eng. Sci. 2011, 28, 217–228. [Google Scholar] [CrossRef]
- Rakhshandehroo, G.R.; Vaghefi, M.; Aghbolaghi, M.A. Forecasting groundwater level in Shiraz Plain Using Artificial Neural Networks. Arab. J. Sci. Eng. 2012, 37, 1187–1883. [Google Scholar] [CrossRef]
- Zhou, T.; Wang, F.; Yang, Z. Comparative analysis of ANN and SVM models combined with wavelet preprocess for groundwater depth prediction. Water 2017, 9, 781. [Google Scholar] [CrossRef] [Green Version]
- Behnia, N.; Rezaeian, F. Coupling wavelet transform with time series models to estimate groundwater level. Arab. J. Geosci. 2015, 8, 8441–8447. [Google Scholar] [CrossRef]
- Afkhamifar, S.; Sarraf, A. Comparative study of groundwater level forecasts using hybrid neural network models. Proc. Inst. Civ. Eng.-Water Manag. 2021, 174, 267–277. [Google Scholar] [CrossRef]
- Hussein, E.A.; Thron, C.; Ghaziasgar, M.; Bagula, A.; Vaccari, M. Groundwater prediction using machine-learning tools. Algorithms 2020, 13, 300. [Google Scholar] [CrossRef]
- Seidu, J.; Ewusi, A.; Kuma, J.S.Y.; Ziggah, Y.Y.; Voigt, H.J. A hybrid groundwater level prediction model using signal decomposition and optimized extreme learning maching. Model. Earth Syst. Environ. 2022, 8, 3607–3624. [Google Scholar] [CrossRef]
- Daliakopoulos, I.N.; Coulibaly, P.; Tsanis, I.K. Groundwater Level Forecasting Using Artificial Neural Networks. J. Hydrol. 2005, 309, 229–240. [Google Scholar] [CrossRef]
- Lallahem, S.; Mania, J.; Hani, A.; Najjar, Y. On the use of neural networks to evaluate groundwater levels in fractured media. J. Hydrol. 2005, 307, 92–111. [Google Scholar] [CrossRef]
- Mohammadi, K. Groundwater Table Estimation Using MODFLOW and Artificial Neural Networks. Pract. Hydroinformatics 2009, 68, 127–138. [Google Scholar]
- Taormina, R.; Chau, K.W.; Sethi, R. Artificial neural network simulation of hourly groundwater levels in a coastal aquifer system of the Venice lagoon. Eng. Appl. Artif. Intell. 2012, 25, 1670–1676. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.L.; Xu, X.C.; Tan, Y.M. BP Neural Network Model Based on Chaos Theory and Application in Ground Water Level Forecasting. In Proceedings of the 2008 2th International Symposium on Intelligent Information Technology Application, Shanghai, China, 21-22 December 2008; pp. 445–448. [Google Scholar]
- Raj, A.S.; Oliver, D.H.; Srinivas, Y.; Viswanath, J. Wavelet based analysis on rainfall and water table depth forecasting using Neural Networks in Kanyakumari district, Tamil Nadu, India. Groundw. Sustain. Dev. 2017, 5, 178–186. [Google Scholar]
- Crespo, J.L.; Zorrilla, M.; Bernardos, P.; Mora, E. A new image prediction model based on spatio-temporal techniques. Vis. Comput. Int. J. Comput. Graph. 2007, 23, 419–431. [Google Scholar] [CrossRef]
- Stroud, J.R.; Müller, P.; Sansó, B. Dynamic models for spatiotemporal data. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2001, 63, 673. [Google Scholar] [CrossRef]
- Li, Z.H.; Miao, Z.H. A new precipitable water vapor STARMA model based on Newton’s method. Adv. Intell. Syst. Comput. 2016, 367, 275–287. [Google Scholar]
- Saha, A.; Singh, K.N.; Ray, M.; Rathod, S. A hybrid spatio-temporal modelling: An application to space-time rainfall forcasting. Theor. Appl. Climatol. 2020, 142, 1271–1282. [Google Scholar] [CrossRef]
- Rathod, S.; Saha, A.; Patil, R.; Ondrasek, G.; Gireesh, C.; Anantha, M.S.; Rao, D.V.K.N.; Bandumula, N.; Senguttuvel, P.; Swarnaraj, A.K.; et al. Two-stage spatiotemporal time series modelling approach for rice yield prediction & advanced agroecosystem management. Agronomy 2021, 11, 12. [Google Scholar]
- Saha, A.; Singh, K.N.; Ray, M.; Rathod, S.; Dhyani, M. Fuzzy rule-based weighted space-time autoregressive moving average models for temperature forecasting. Theor. Appl. Clim. 2022, 150, 1321–1335. [Google Scholar] [CrossRef]
- Kumar, R.R.; Sarkar, K.A.; Dhakre, D.S.; Bhattacharya, D. A hybrid space-time modelling approach for forecasting monthly temperature. Environ. Model. Assess. 2022, 1–14. [Google Scholar] [CrossRef]
- Ahmadi, R.; Shahrabi, J.; Aminshahidy, B. Forecasting multiple-well flow rates using a novel space-time modeling approach. J. Pet. Sci. Eng. 2020, 191, 107027. [Google Scholar] [CrossRef]
- He, L.; Hou, M.Q.; Chen, S.Z.; Zhang, J.; Chen, J.; Qi, H. Construction of a spatio-temporal coupling model for groundwater level prediction: A case study of Changwu area, Yangtze River Delta region of China. Water Supply 2021, 21, 3790–3809. [Google Scholar] [CrossRef]
- Sivajogi, D.; Koppula. Forecasting Groundwater Levels: A Stochastic Procedure. Transp. Res. Rec. 1984, 965, 16–21. [Google Scholar]
- Pourtaghi, Z.S.; Pourghasemi, H.R. GIS-based groundwater spring potential assessment and mapping in the Birjand Township, southern Khorasan Province, Iran. Hydrogeol. J. 2014, 22, 643–662. [Google Scholar] [CrossRef]
- Demel, S.S.; Du, J. Spatio-temporal models for some data sets in continuous space and discrete time. Stat. Sin. 2015, 25, 81–98. [Google Scholar]
- Mclaughlin, D.B. Hanford Groundwater Modeling: A Numerical Comparison of Bayesian and Fisher Parameter Estimation Techniques; Resource Management Associates: Lafayette, CA, USA, 1980. [Google Scholar]
- Hamilton, J.D. State-space models. Handb. Econom. 1986, 4, 39–50. [Google Scholar]
- Zadrozny, P.A.; Mittnik, S. Kalman-filtering methods for computing information matrices for time-invariant, periodic, and generally time-varying VARMA models and samples. Comput. Math. Appl. 1994, 28, 107–119. [Google Scholar] [CrossRef] [Green Version]
- He, L.; Chen, L.; Chen, S.Z. Visualization method for porous groundwater seepage flow field based on particle flow: Case of Yancheng city in the East coast of China. Geofluids 2022, 2022, 4850968. [Google Scholar] [CrossRef]
- Martin, R.L.; Oeppen, J.E. The Identification of Regional Forecasting Models Using Space: Time Correlation Functions. Trans. Inst. Br. Geogr. 1975, 66, 95–118. [Google Scholar] [CrossRef]
- George, E.P.B.; Gwilym, M.J.; Gregory, C.R.; Greta, M.L. Time Series Analysis; Wiley: Hoboken, NJ, USA, 2008; pp. 47–91. [Google Scholar]
- Cao, Q.; Yue, D.; Gao, Y.; Wang, X. Contrast Study on Various Methods Extracting Trend Extraction Based on Non-stationary Time Series. J. Geod.Geody. (In Chinese). 2013, 33, 150–154. [Google Scholar]
- Wang, G.; Yang, P.; Daren, L. Method of Spatio-Temporal Series and Tests Analysis on Its Predictable Skill. Chin. J. Atmos. Sci. 2004, 28, 536–544. [Google Scholar]
- Patle, G.T.; Singh, D.K.; Sarangi, A.; Rai, A.; Khanna, M.; Sahoo, R.N. Time Series Analysis of Groundwater Levels and Projection of Future Trend. J. Geol. Soc. India 2015, 85, 232–242. [Google Scholar] [CrossRef]
- Barzegar, R.; Fijani, E.; Moghaddam, A.A.; Tziritis, E. Forecasting of Groundwater Level Fluctuations Using Ensemble Hybrid Multi-wavelet Neural Network-based Models. Sci. Total. Environ. 2017, 599, 20–31. [Google Scholar] [CrossRef] [PubMed]
- Al-Haija, Q.A. A machine learning based predictive model for time-series modelling and analysis. Int. J. Spatio-Temporal Data Sci. 2021, 1, 270–283. [Google Scholar] [CrossRef]
- Cliff, A.D.; Ord, J.K. Space-Time Modelling with an Application to Regional Forecasting. Trans. Inst. Br. Geogr. 1975, 64, 119–128. [Google Scholar] [CrossRef]
- Pfeifer, P.E.; Deutsch, S.J. Identification and Interpretation of First Order Space-Time ARMA Models. Technometrics 1980, 22, 397–408. [Google Scholar] [CrossRef]
- Pfeifer, P.E.; Deutsch, S.J. Independence and sphericity tests for the residuals of space-time arma models Independence and sphericity tests for the residuals. Commun. Stat.—Simul. Comput. 1980, 9, 533–549. [Google Scholar] [CrossRef]
- Tao, C.; Jiaqiu, W.; Xia, L. A Hybrid Framework for Space-Time Modeling of Environmental Data. Geogr. Anal. 2011, 43, 188–210. [Google Scholar]
- Zhou, M.; Buongriorno, J. Space-Time Modeling of Timber Prices. West. J. Agric. Econ. 2006, 31, 40–56. [Google Scholar]
- Pfeifer, P.E.; Deutsch, S.J. STARIMA (Space-Time Autoregressive Integrated Moving Average) Model-Building Procedure with Application to Description and Regional Forecasting; Bureau of Justice Statistics: Washington, DC, USA, 1979.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Well Number | Bias u | Peak State u |
|---|---|---|
| 51073006# | 3.075023 | 0.559089 |
| 51073509# | 3.136233 | 0.852506 |
| 51073512# | 2.765471 | 1.891852 |
| 51074507# | 2.712559 | 0.273745 |
| 51073006# | 51073509# | 51073512# | 51074507# | ||
|---|---|---|---|---|---|
| N | 40 | 40 | 40 | 40 | |
| Normal | Mean | −30.8653 | −19.5038 | −7.69125 | −36.1275 |
| Parameters a,b | Std. Deviation | 2.783878 | 2.366837 | 0.55931 | 3.325536 |
| Most Extreme Differences | Absolute | 0.320592 | 0.195934 | 0.159134 | 0.166015 |
| Positive | 0.320592 | 0.195934 | 0.159134 | 0.166015 | |
| Negative | −0.17658 | −0.10716 | −0.08156 | −0.15888 | |
| Test Statistic | 0.320592 | 0.195934 | 0.159134 | 0.166015 | |
| Asymp. Sig. (2-tailed) | 0.000 c | 0.000 c | 0.012 c | 0.007 c | |
| Number of Issues | Water Level (m) | Number of Issues | Water Level (m) | Number of Issues | Water Level (m) | Number of Issues | Water Level (m) |
|---|---|---|---|---|---|---|---|
| 1 | −22.322 | 11 | −23.344 | 21 | −25.103 | 31 | −25.977 |
| 2 | −22.161 | 12 | −23.540 | 22 | −25.182 | 32 | −26.212 |
| 3 | −22.323 | 13 | −24.108 | 23 | −25.285 | 33 | −26.154 |
| 4 | −22.492 | 14 | −24.138 | 24 | −25.327 | 34 | −25.336 |
| 5 | −22.468 | 15 | −24.268 | 25 | −25.345 | 35 | −26.486 |
| 6 | −22.726 | 16 | −24.574 | 26 | −25.461 | 36 | −26.536 |
| 7 | −22.556 | 17 | −24.646 | 27 | −25.751 | 37 | −26.553 |
| 8 | −22.879 | 18 | −24.744 | 28 | −25.810 | 38 | −26.621 |
| 9 | −22.833 | 19 | −24.971 | 29 | −25.698 | 39 | −26.703 |
| 10 | −22.338 | 20 | −25.090 | 30 | −25.810 | 40 | −26.844 |
| Number of Issues | Variable Range (km) | Offset Abutment Value (C) | Nugget Value (C0) | Abutment Values (C0 + C) | C0/Sill (%) |
|---|---|---|---|---|---|
| 4 | 21.7 | 18.42 | 4.99 | 23.41 | 21.32 |
| 8 | 20.7 | 16.24 | 5.21 | 21.45 | 24.29 |
| 12 | 22.8 | 15.32 | 7.73 | 23.05 | 33.54 |
| 16 | 21.4 | 16.42 | 10.83 | 27.25 | 39.74 |
| 20 | 21.8 | 14.77 | 10.88 | 25.65 | 42.42 |
| 24 | 21.3 | 18.63 | 9.94 | 28.57 | 34.79 |
| 28 | 21.5 | 13.19 | 12.71 | 25.9 | 49.07 |
| Coefficient | Std. | t-Statistic | Prob | |
|---|---|---|---|---|
| 0.54276 | 0.06895 | 4.5148 | 0.0132 | |
| 0.15267 | 0.07429 | 6.8419 | 0.0051 | |
| −0.38156 | 0.06472 | 6.7513 | 0.0024 | |
| 0.24158 | 0.05719 | 3.4856 | 0.0084 |
| Space Delay (h) Time Delay (k) | 0 | 1 | Space Delay (h) Time Delay (k) | 0 | 1 |
|---|---|---|---|---|---|
| 1 | 0.038 | −0.073 | 9 | 0.064 | −0.042 |
| 2 | −0.012 | −0.028 | 10 | 0.013 | 0.026 |
| 3 | 0.048 | −0.035 | 11 | −0.016 | −0.092 |
| 4 | −0.04 | −0.023 | 12 | 0.068 | −0.0011 |
| 5 | −0.03 | 0.017 | 13 | −0.0093 | 0.0017 |
| 6 | −0.027 | −0.021 | 14 | −0.037 | 0.061 |
| 7 | −0.034 | 0.019 | 15 | 0.0061 | −0.0347 |
| 8 | 0.017 | −0.068 | 16 | −0.015 | 0.0015 |
| Periods | Fitted Values | Periods | Predicted Values | ||||
|---|---|---|---|---|---|---|---|
| RMSE | RMSE | ||||||
| BP-STARMA | STARMA | BP | BP-STARMA | STARMA | BP | ||
| 10 | 0.662993 | 0.684267 | 0.630171 | 34 | 1.104 | 1.25 | 1.34 |
| 20 | 0.397683 | 0.536424 | 0.493816 | 37 | 1.38 | 1.1642 | 1.91 |
| 30 | 0.369923 | 0.361022 | 0.399997 | 40 | 2.20 | 2.718 | 2.69 |
| Indicators | Models | 51072002# | 51072010# | 51073003# | 51073010# | 51074004# | 51074515# |
|---|---|---|---|---|---|---|---|
| RSE | BP-STARMA | 0.150101 | 0.283151 | 0.016342 | 0.220120 | 0.053888 | 0.303071 |
| STARMA | 0.604417 | 0.904445 | 0.114733 | 0.049426 | 0.117395 | 0.53618 | |
| BP | 0.828549 | 0.427072 | 0.022214 | 0.449457 | 0.399316 | 0.394206 | |
| NMSE | BP-STARMA | 0.000254 | 0.000119 | 0.000381 | 0.000630 | 0.000205 | 0.000128 |
| STARMA | 0.001012 | 0.000278 | 0.001797 | 0.000105 | 0.000448 | 0.000226 | |
| BP | 0.00199 | 0.000247 | 0.000525 | 0.001161 | 0.000851 | 0.000239 | |
| RMSE | BP-STARMA | 0.385879 | 0.347153 | 0.425131 | 0.704296 | 0.393573 | 0.370956 |
| STARMA | 0.774334 | 0.620444 | 1.126466 | 0.333735 | 0.580906 | 0.493408 | |
| BP | 1.0878 | 0.587649 | 0.500338 | 0.957361 | 0.798729 | 0.507498 | |
| MAE | BP-STARMA | 0.315065 | 0.263823 | 0.339018 | 0.58108 | 0.27274 | 0.291155 |
| STARMA | 0.619108 | 0.493683 | 0.767228 | 0.244518 | 0.44759 | 0.408922 | |
| BP | 0.6692 | 0.449455 | 0.388958 | 0.627958 | 0.56586 | 0.377935 |
| Monitoring Well Number | Fitted Values | Predicted Values | ||||
|---|---|---|---|---|---|---|
| RMSE | RMSE | |||||
| BP-STARMA | STARMA | BP | BP-STARMA | STARMA | BP | |
| 51072002# | 0.3955 | 0.6583 | 0.5089 | 0.3448 | 1.1245 | 2.2092 |
| 51072010# | 0.3814 | 0.6187 | 0.4180 | 0.1440 | 0.3957 | 1.0137 |
| 51073003# | 0.3177 | 0.4555 | 0.3779 | 0.7070 | 2.3483 | 0.8249 |
| 51073010# | 0.5780 | 0.2346 | 0.4510 | 1.0695 | 0.5803 | 1.9414 |
| 51074004# | 0.2968 | 0.4336 | 0.4152 | 0.6497 | 0.9670 | 1.5812 |
| 51074515# | 0.3648 | 0.4221 | 0.3817 | 0.3745 | 0.7104 | 0.8396 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, M.; Chen, S.; Chen, X.; He, L.; He, Z. A Hybrid Coupled Model for Groundwater-Level Simulation and Prediction: A Case Study of Yancheng City in Eastern China. Water 2023, 15, 1085. https://doi.org/10.3390/w15061085
Hou M, Chen S, Chen X, He L, He Z. A Hybrid Coupled Model for Groundwater-Level Simulation and Prediction: A Case Study of Yancheng City in Eastern China. Water. 2023; 15(6):1085. https://doi.org/10.3390/w15061085
Chicago/Turabian StyleHou, Manqing, Suozhong Chen, Xinru Chen, Liang He, and Zhichao He. 2023. "A Hybrid Coupled Model for Groundwater-Level Simulation and Prediction: A Case Study of Yancheng City in Eastern China" Water 15, no. 6: 1085. https://doi.org/10.3390/w15061085
APA StyleHou, M., Chen, S., Chen, X., He, L., & He, Z. (2023). A Hybrid Coupled Model for Groundwater-Level Simulation and Prediction: A Case Study of Yancheng City in Eastern China. Water, 15(6), 1085. https://doi.org/10.3390/w15061085