



Comparative Assessment of Different Image Velocimetry Techniques for Measuring River Velocities Using Unmanned Aerial Vehicle Imagery




Abstract
:1. Introduction
2. Materials and Methods
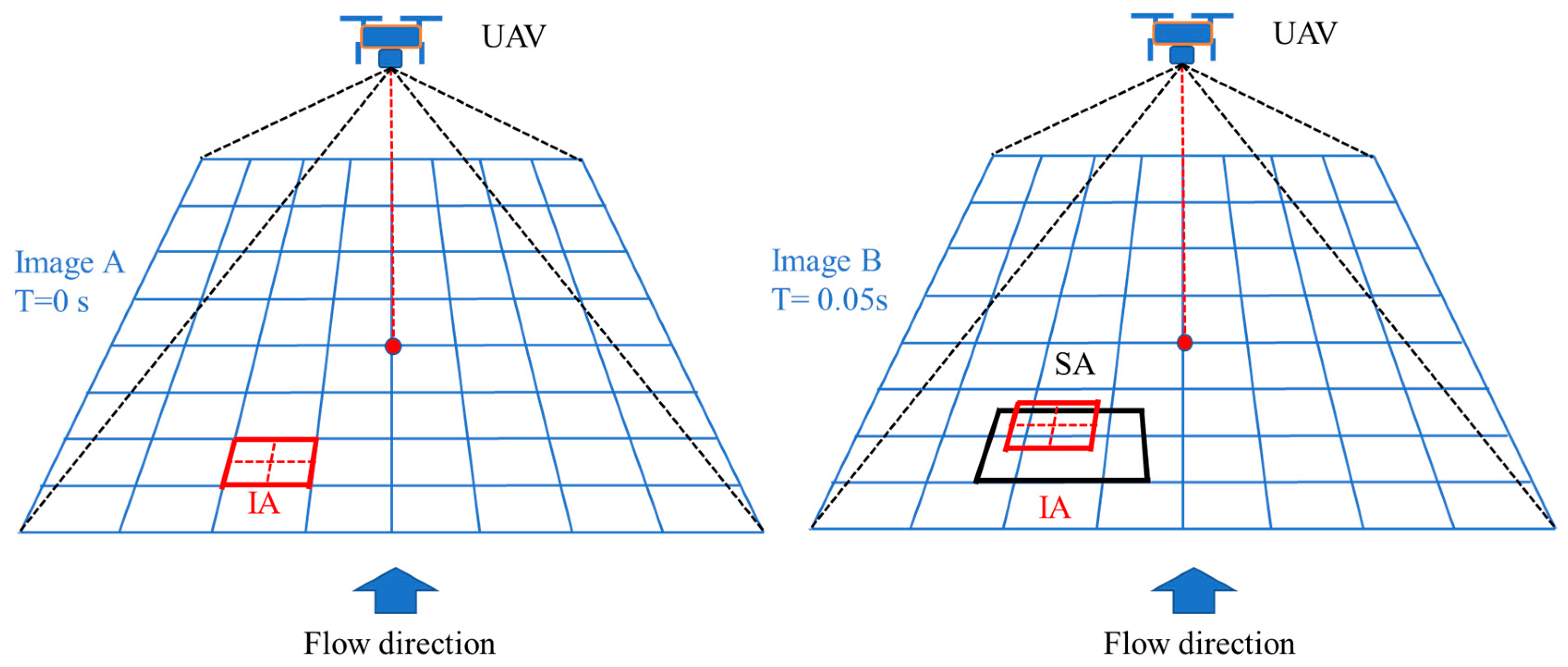
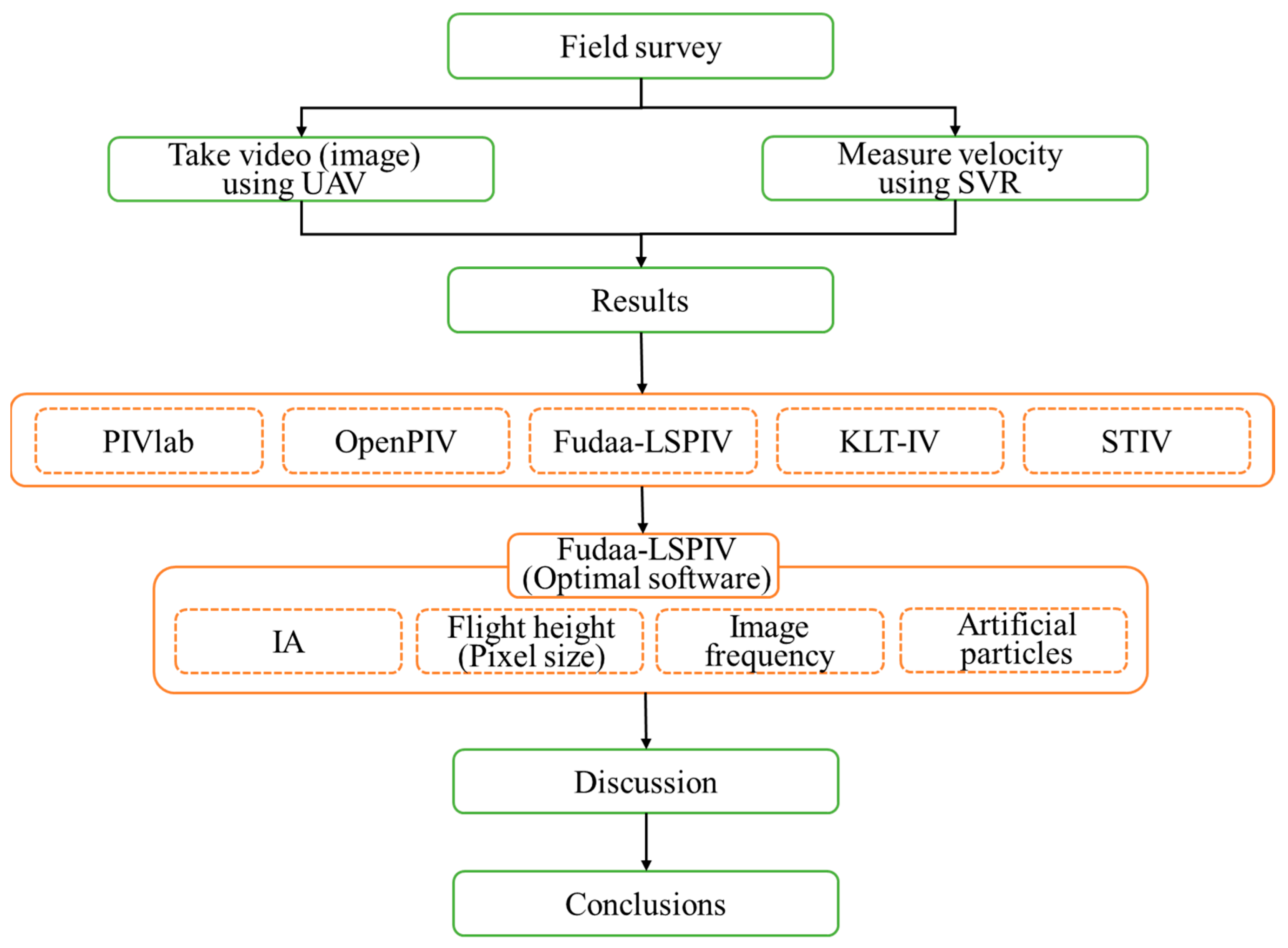
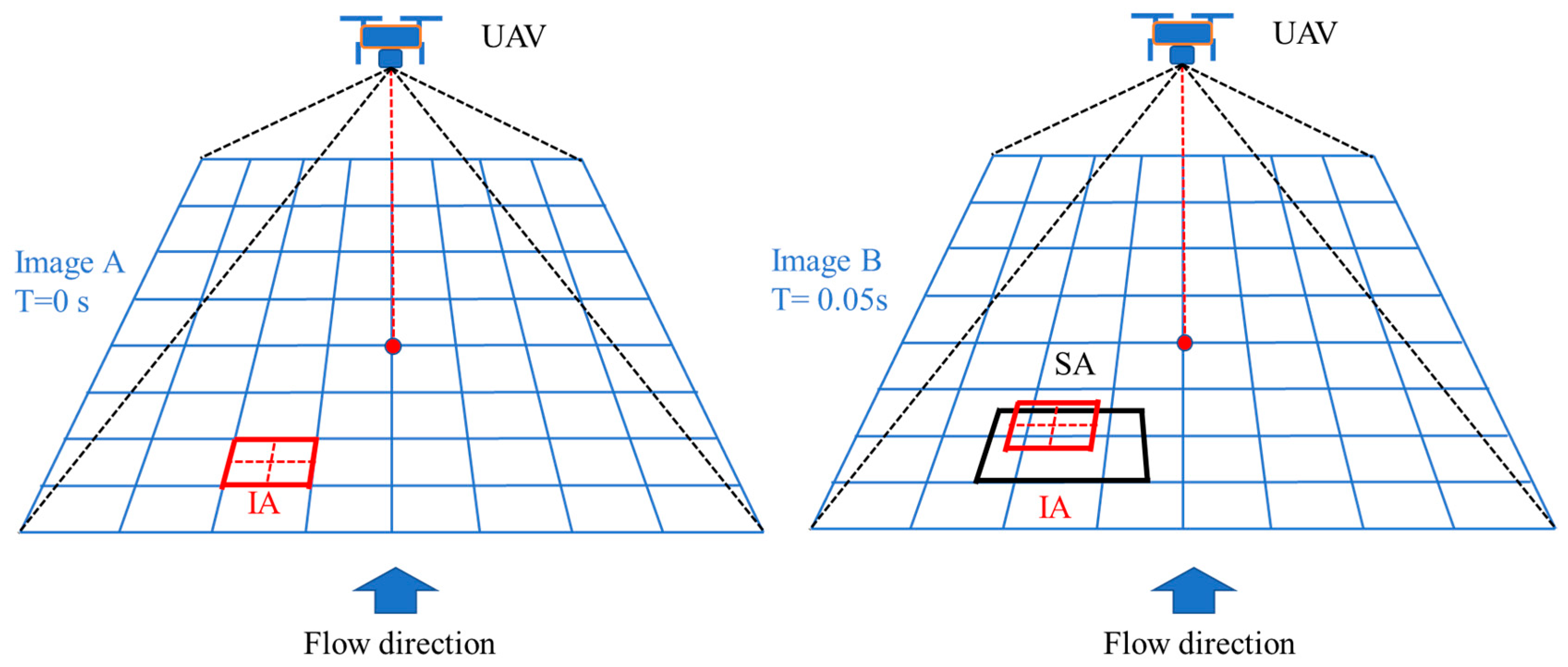
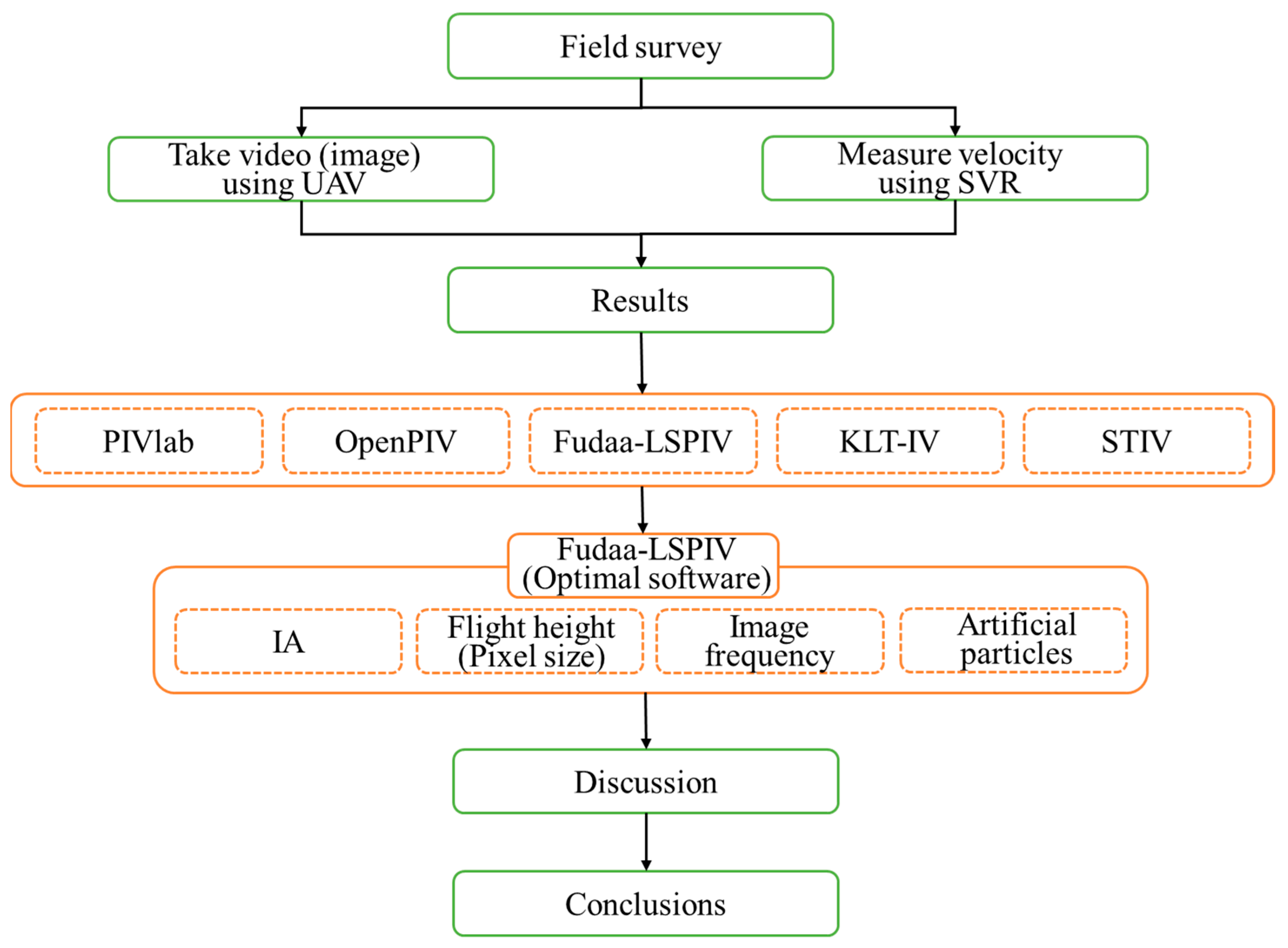
2.1. Image Velocimetry Process
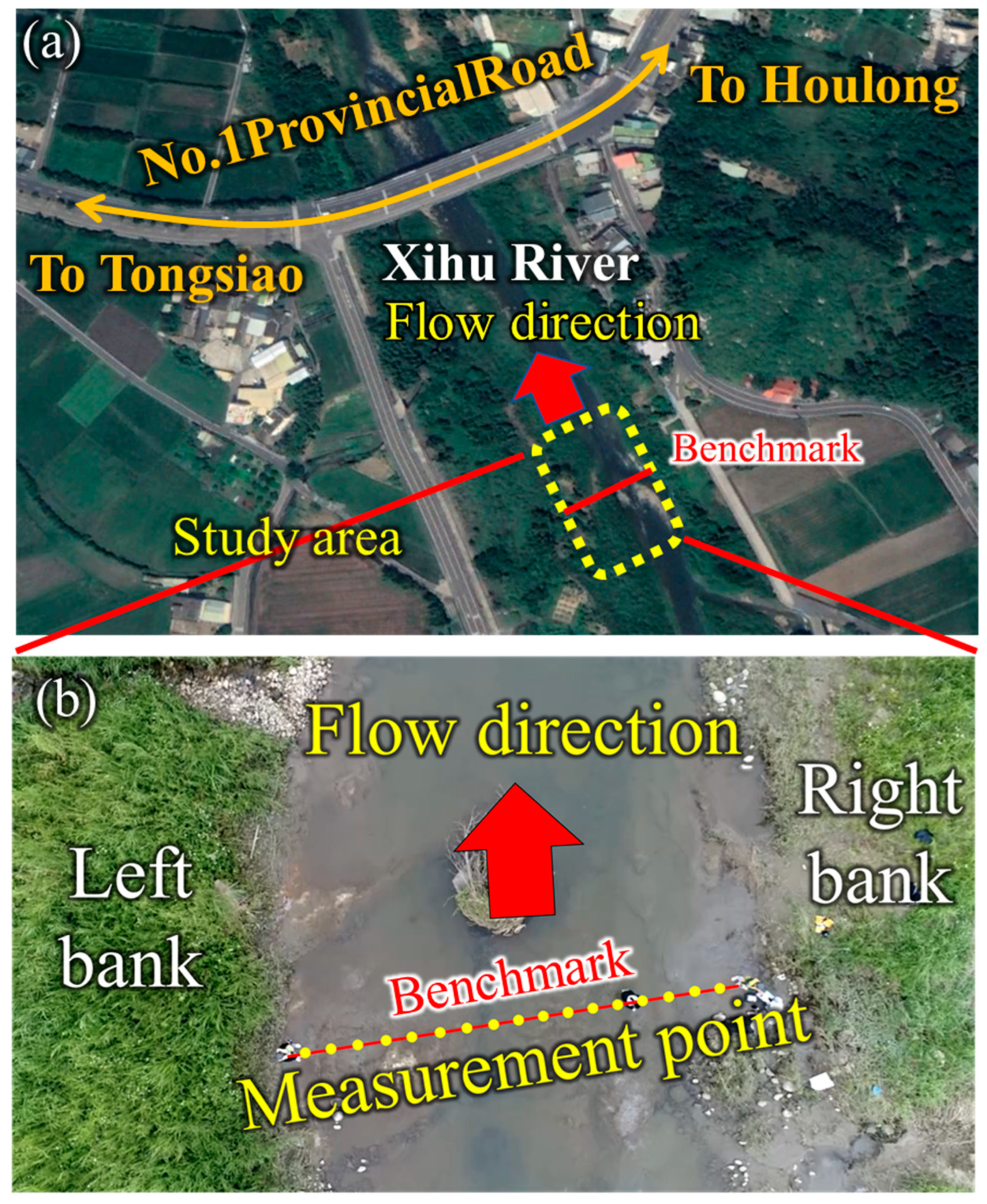
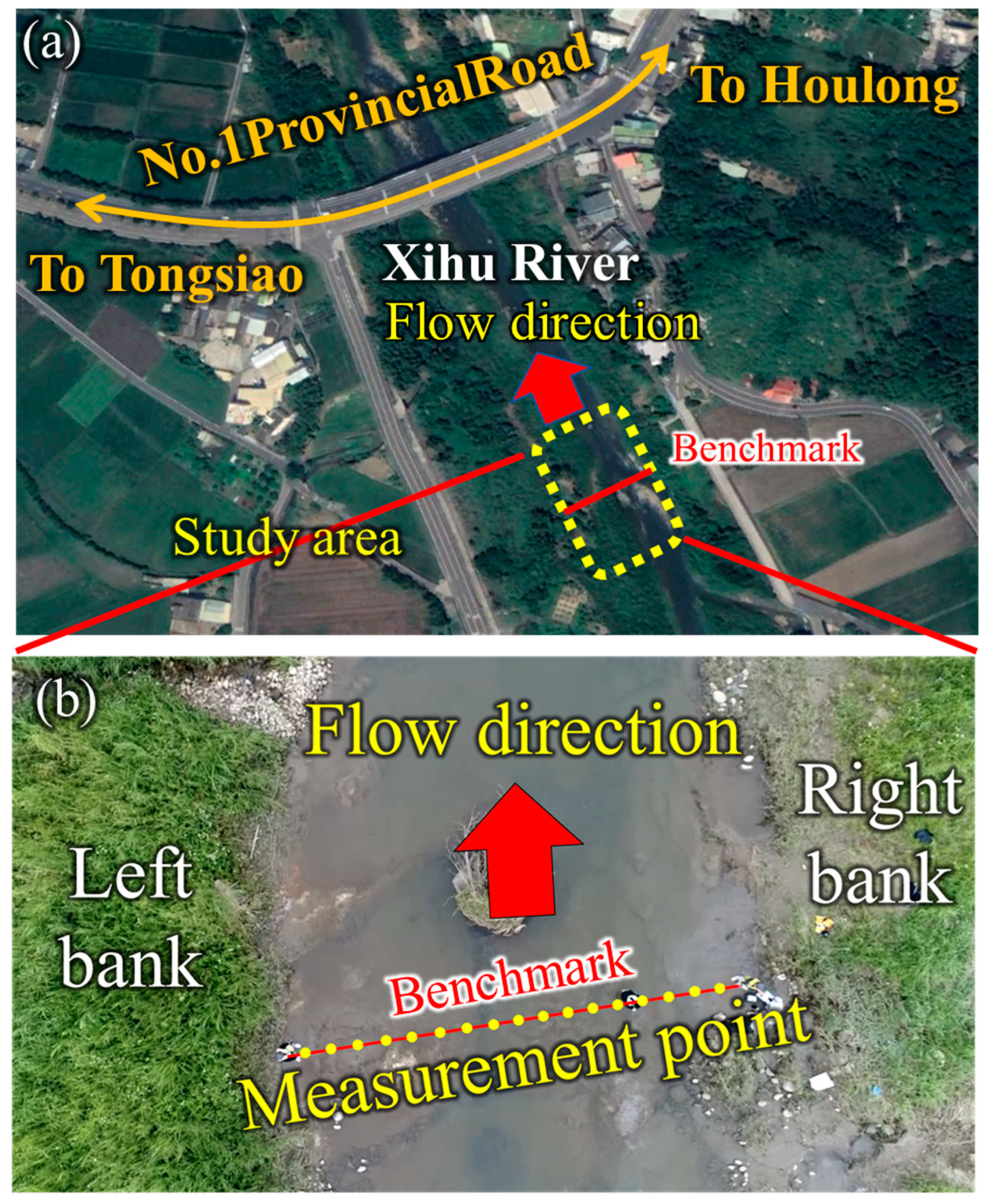
2.2. Description of the Study Area
2.3. Unmanned Aerial Vehicle (UAV)
2.4. Surface Velocity Radar (SVR)
2.5. Statistical Error
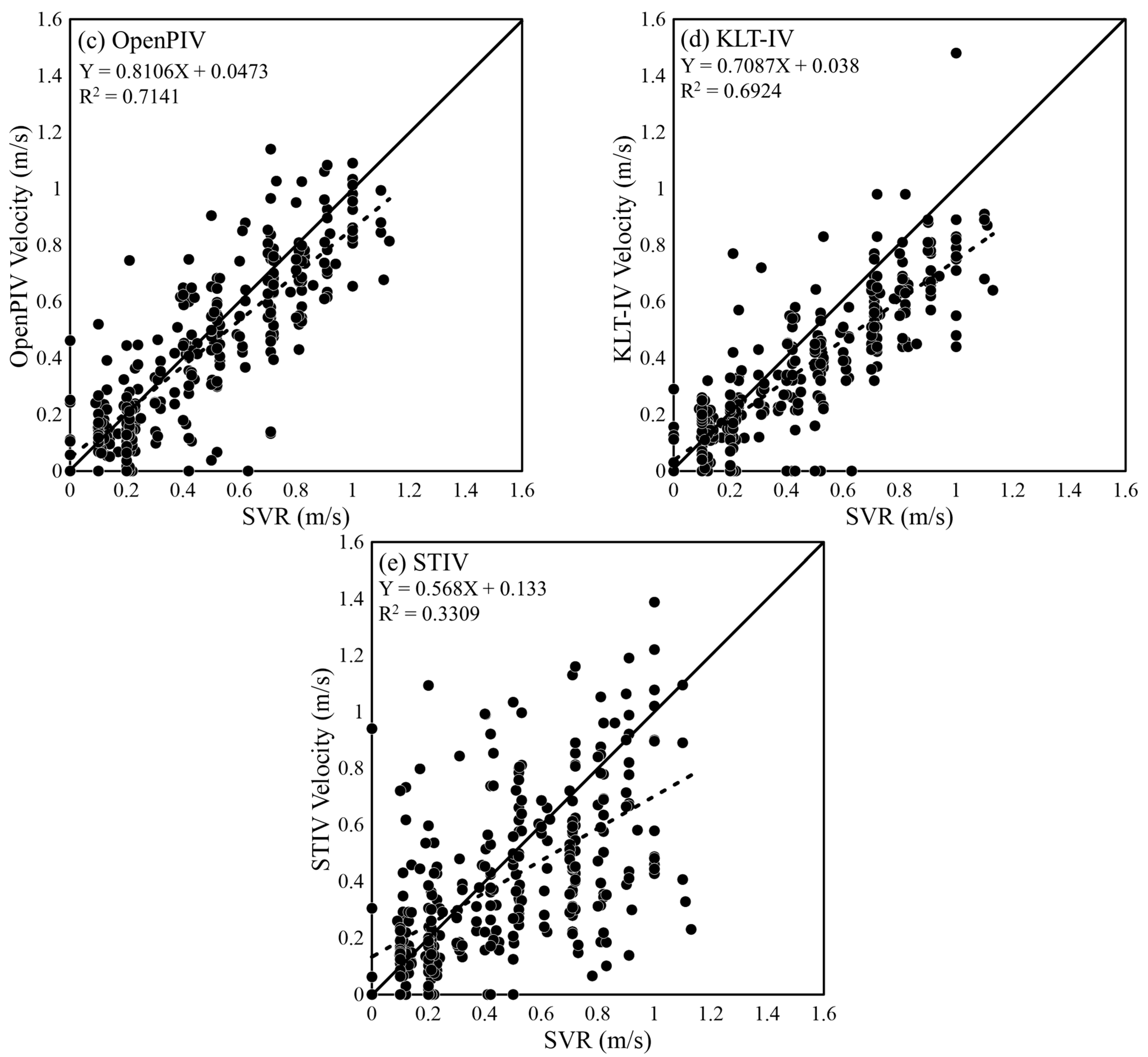
3. Results
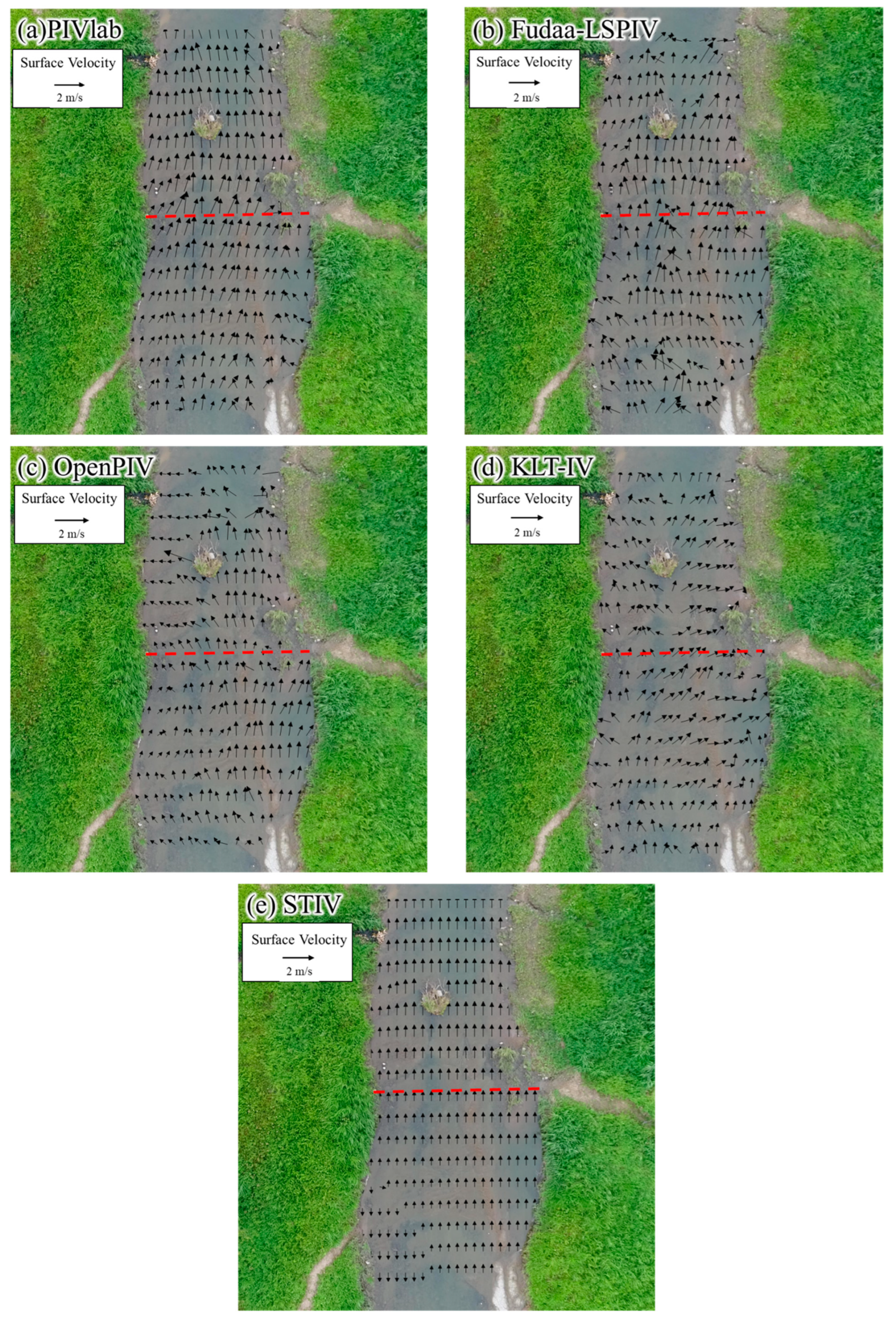
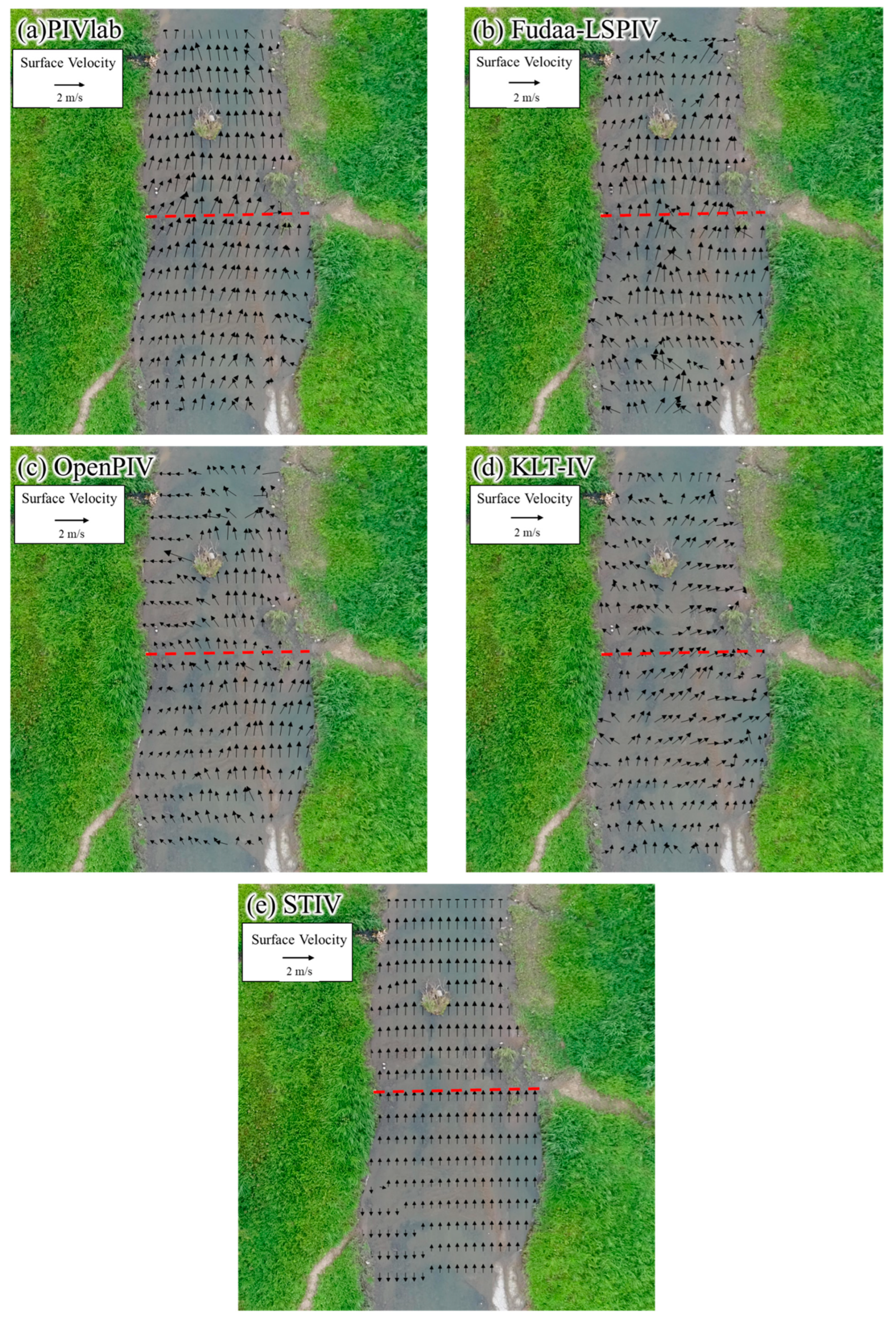
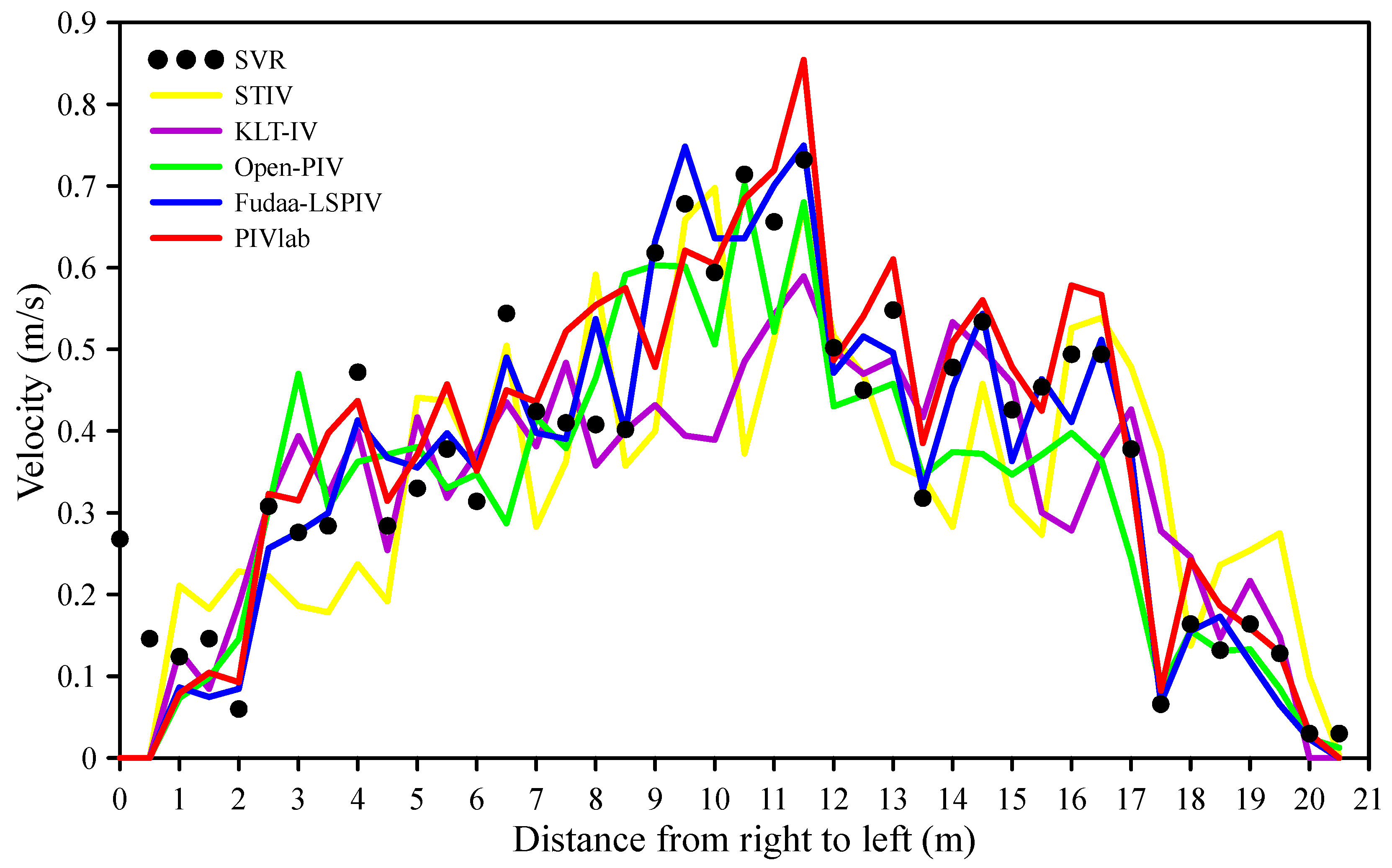
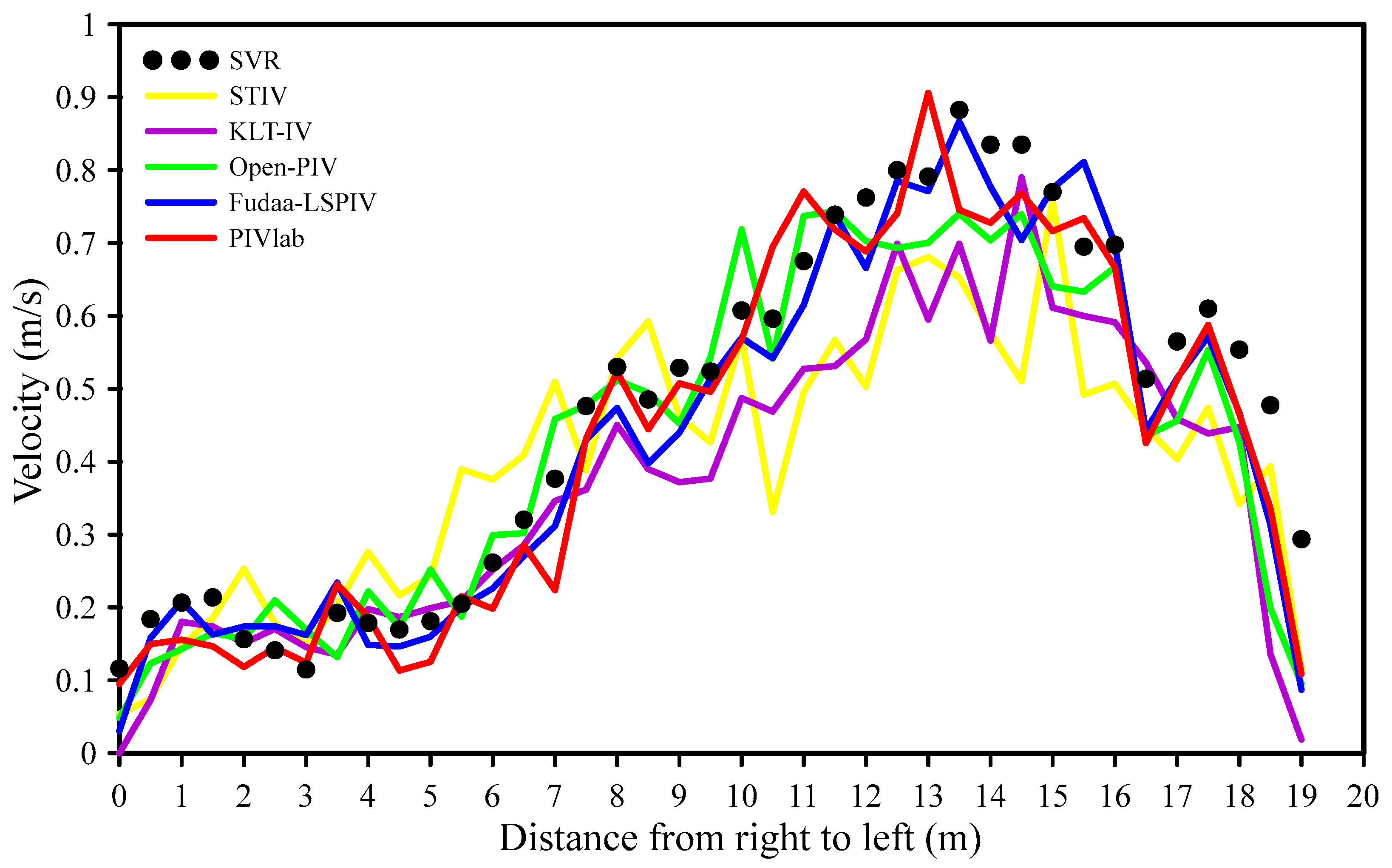
3.1. Measurement Results on 5 July 2022
3.2. Measurement Results on 11 July 2022
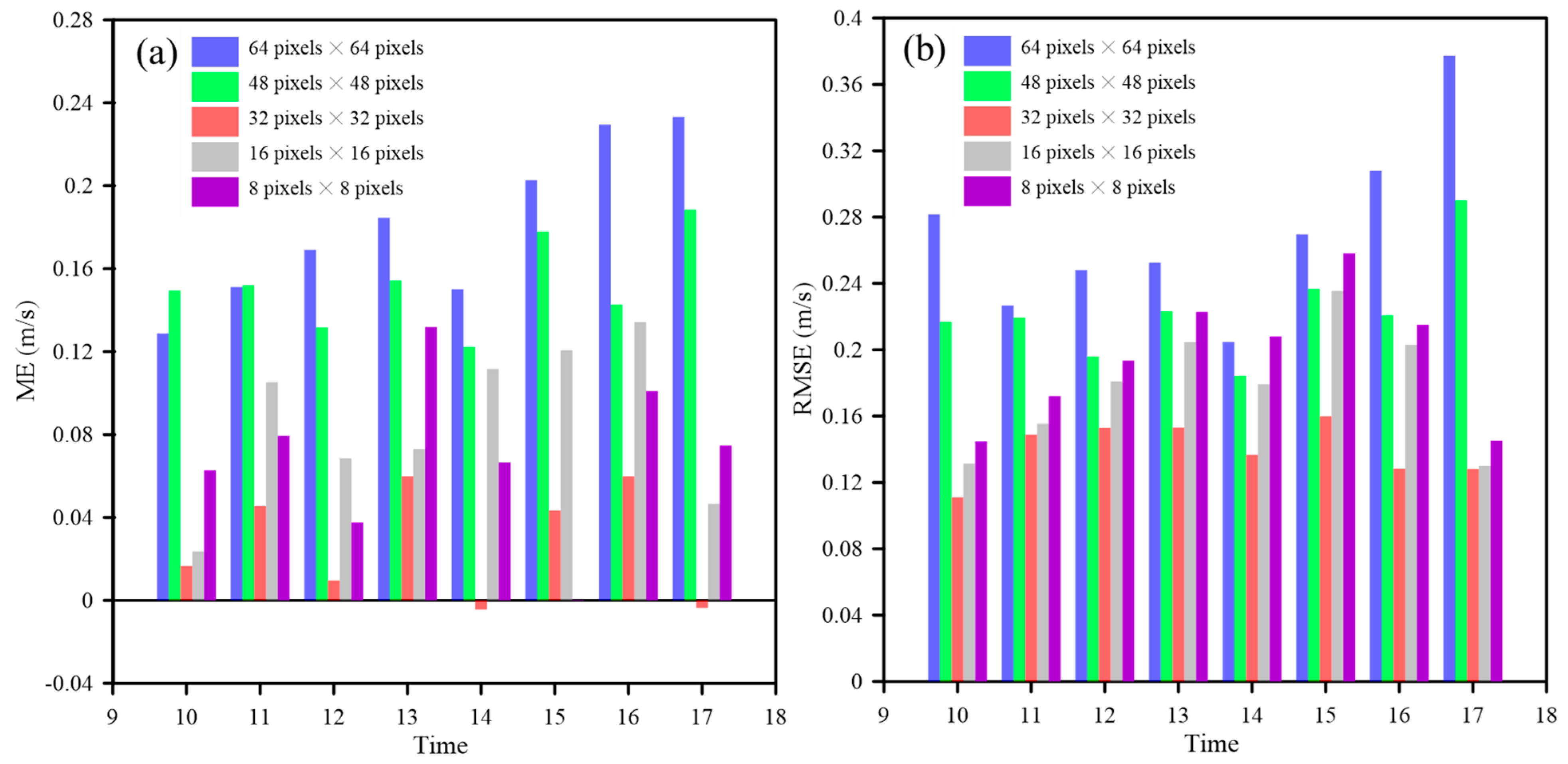
3.3. Influence of the Interrogation Area (IA) on Surface Flow Measurement
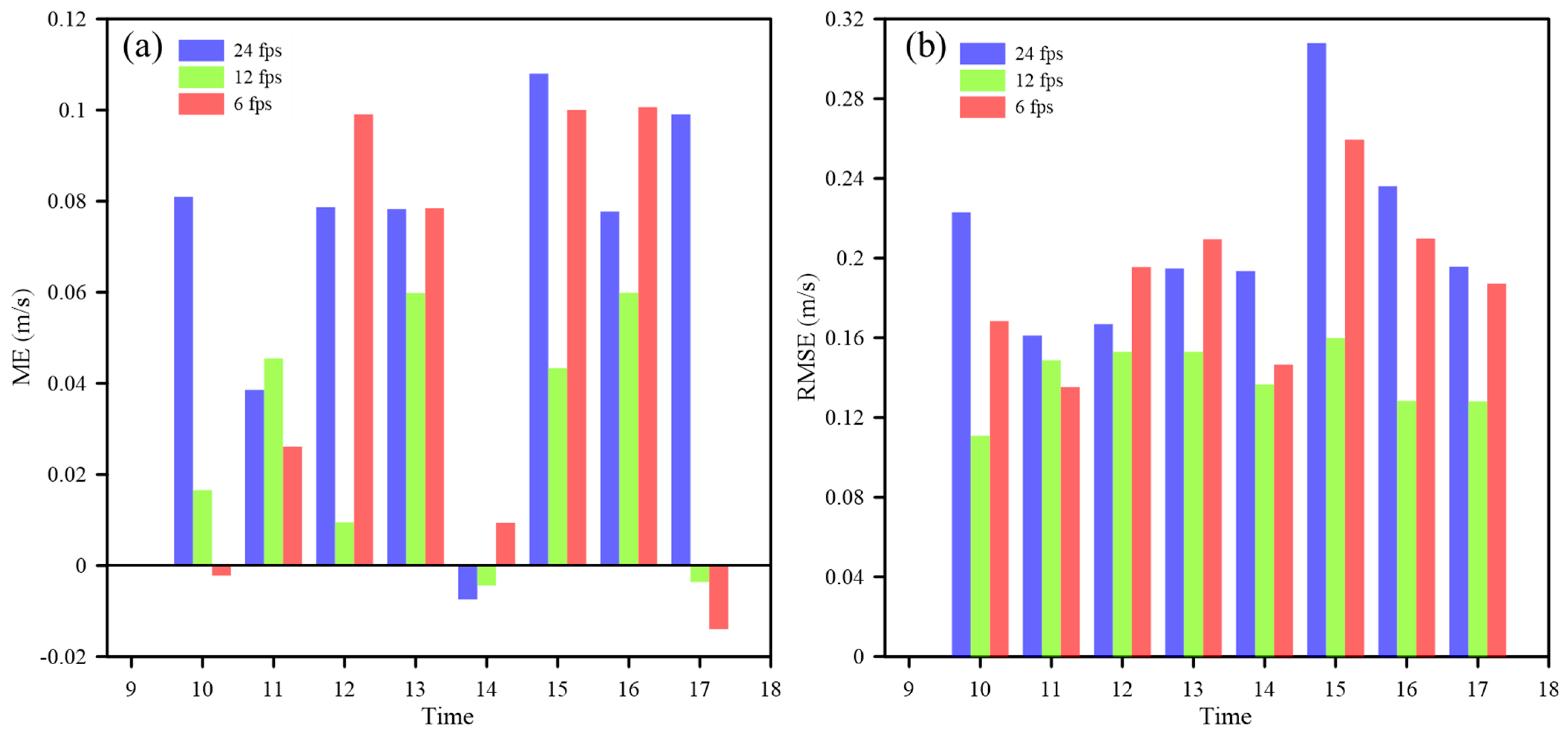
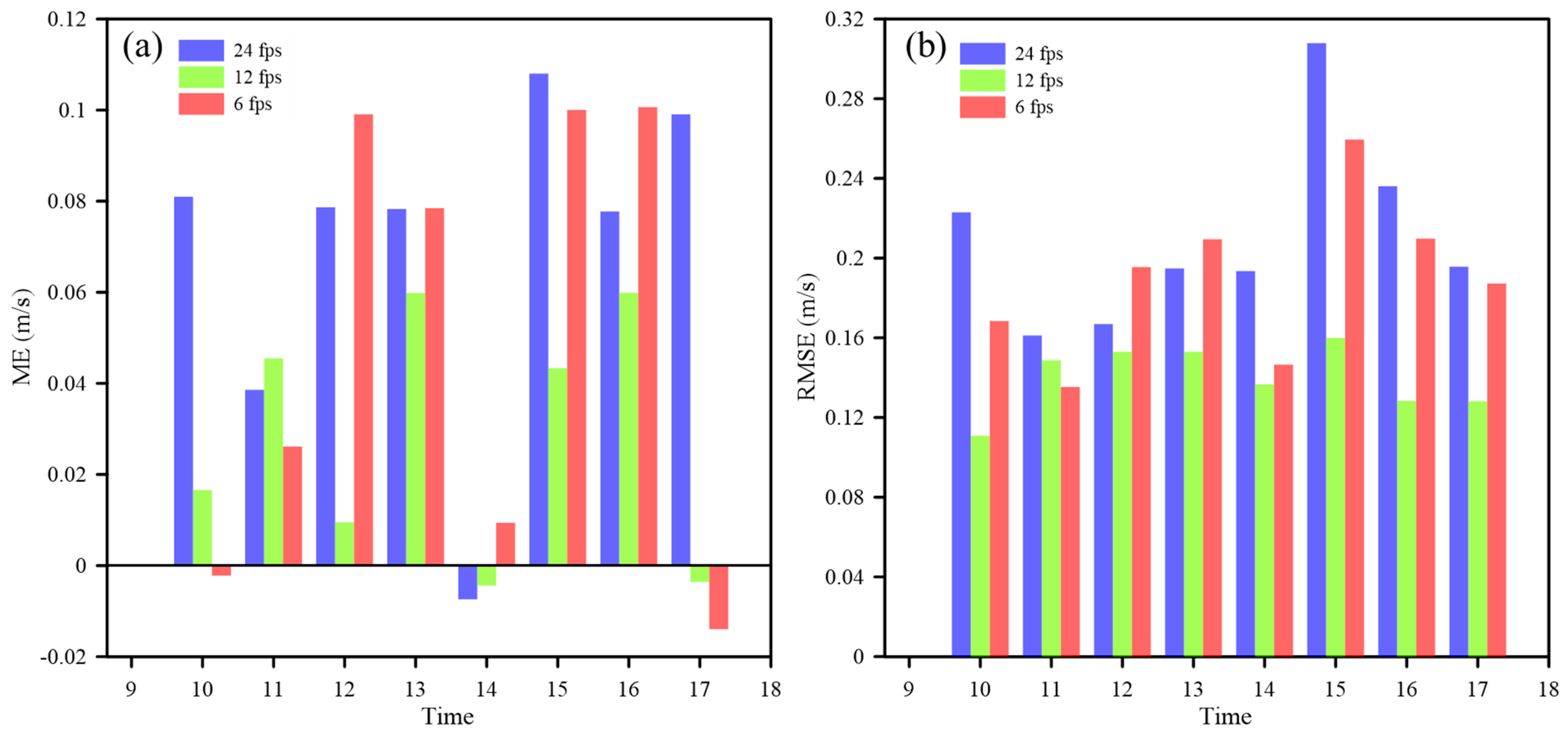
3.4. Influence of Image Frequency on Surface Flow Measurement
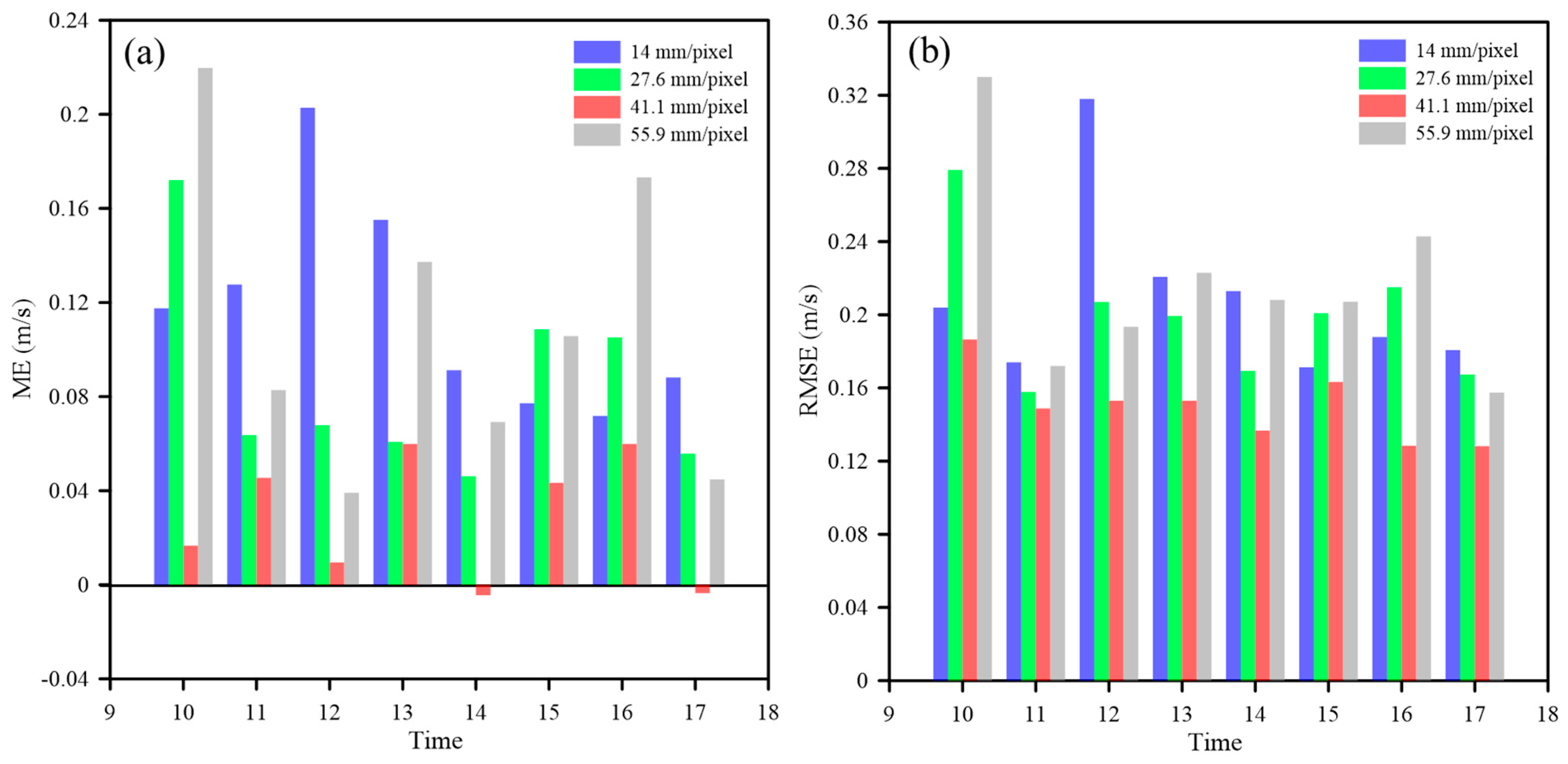
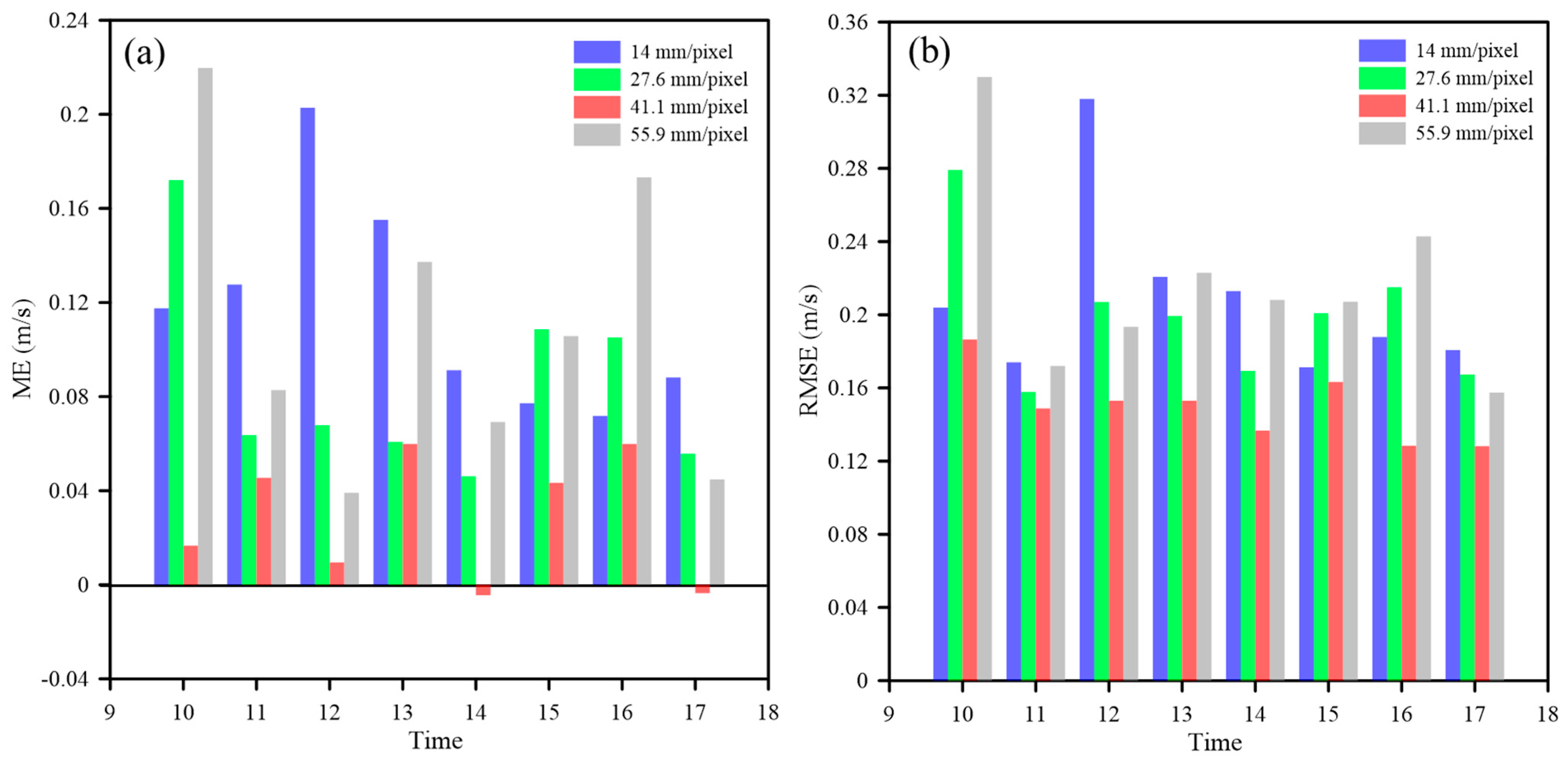
3.5. Influence of Pixel Size on Surface Flow Measurement
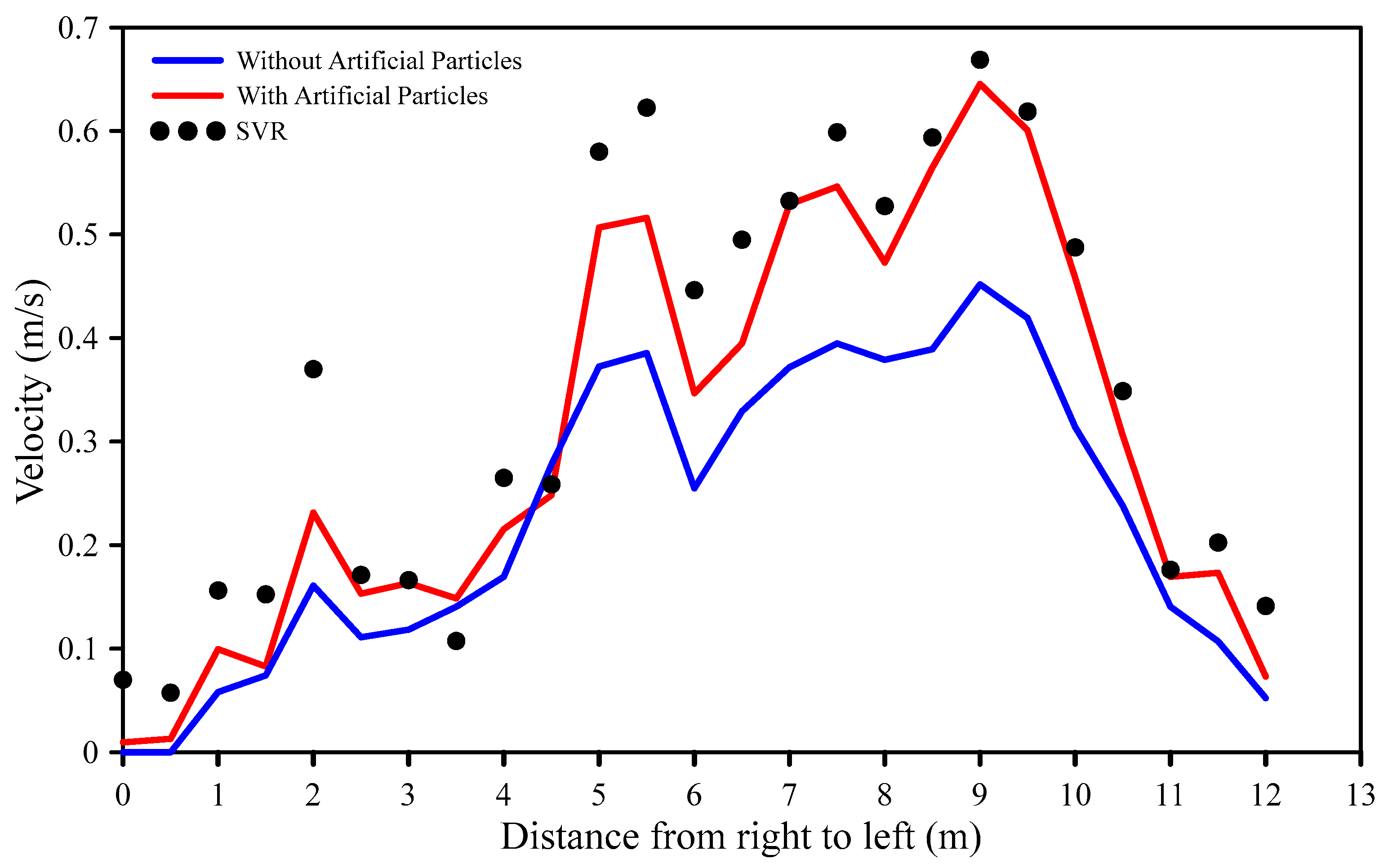
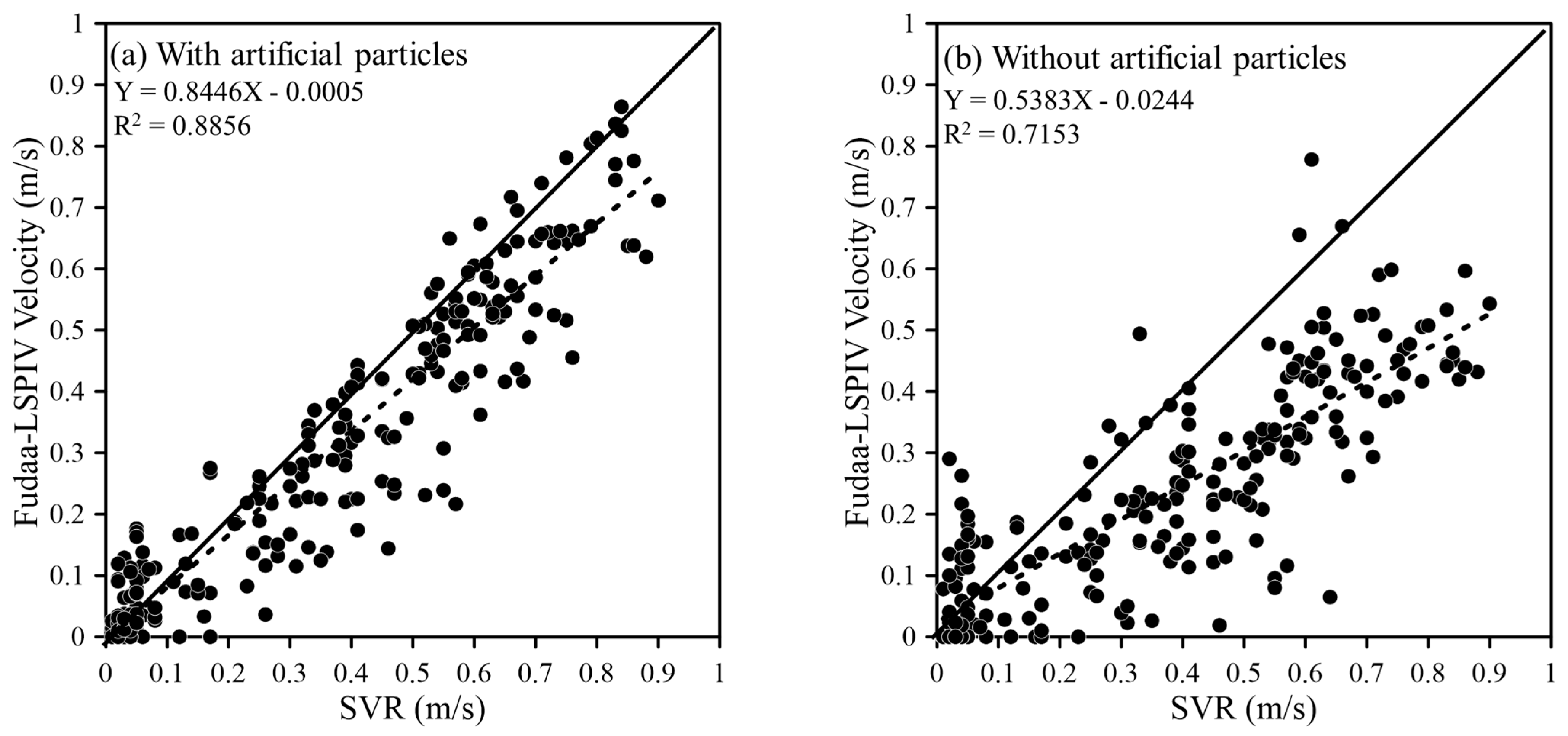
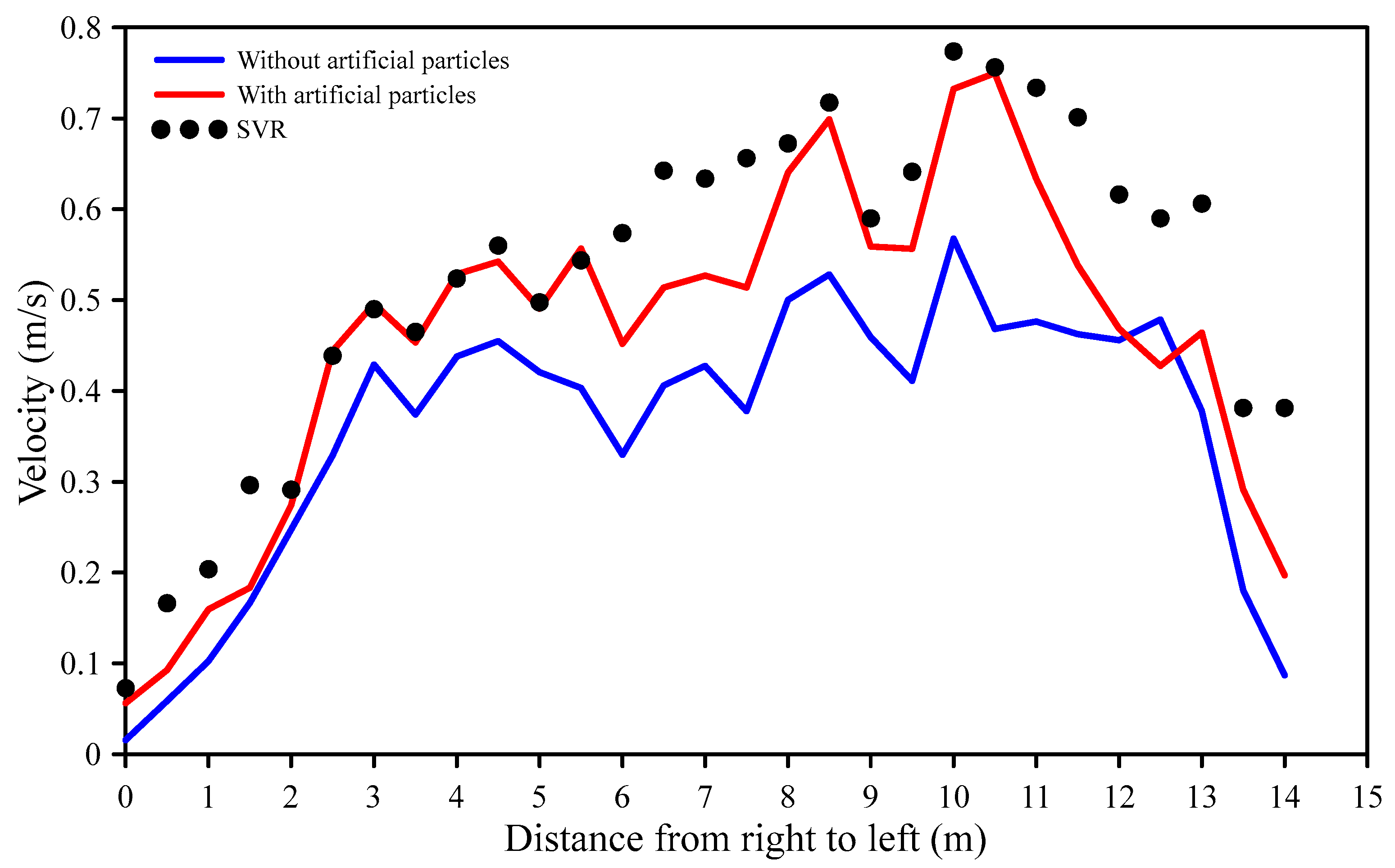
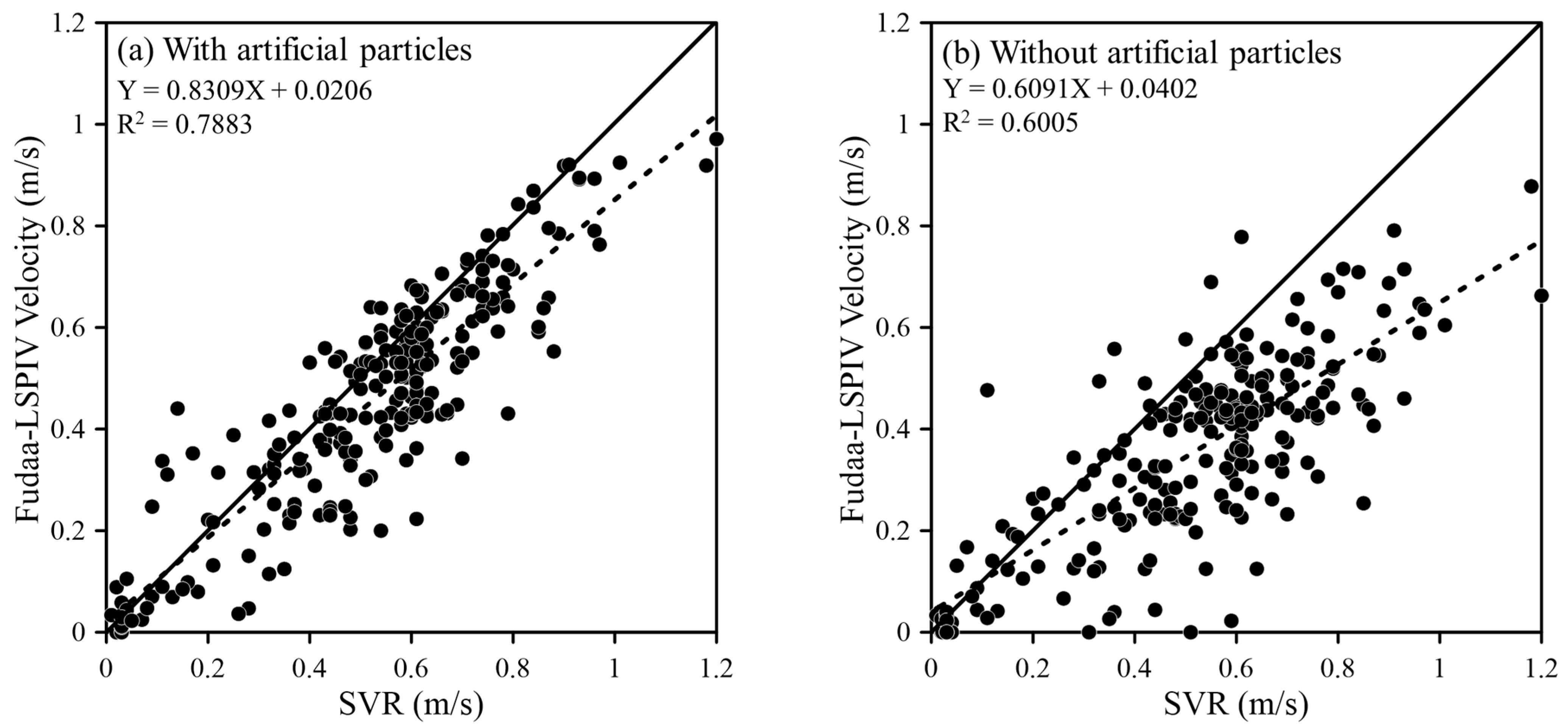
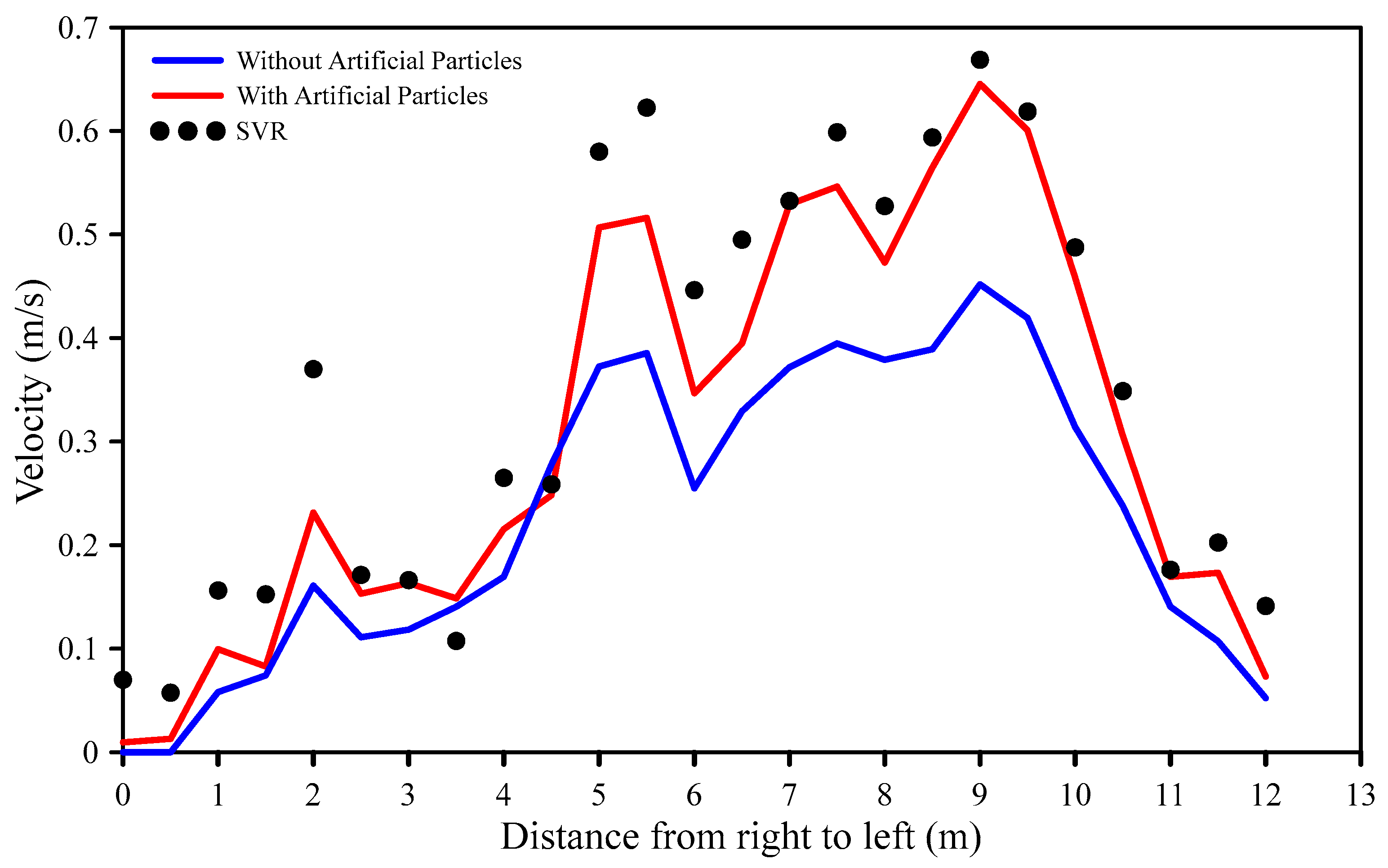
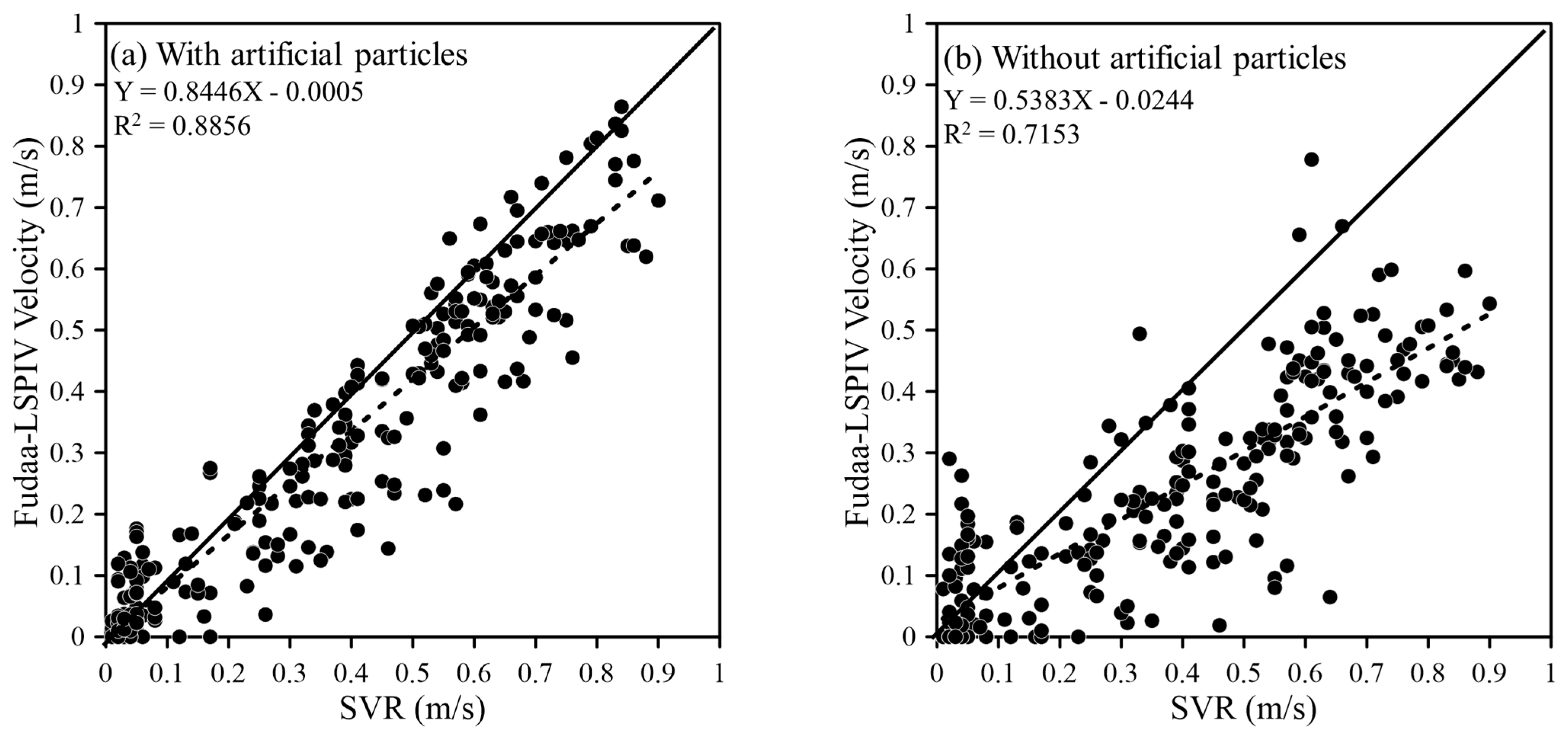
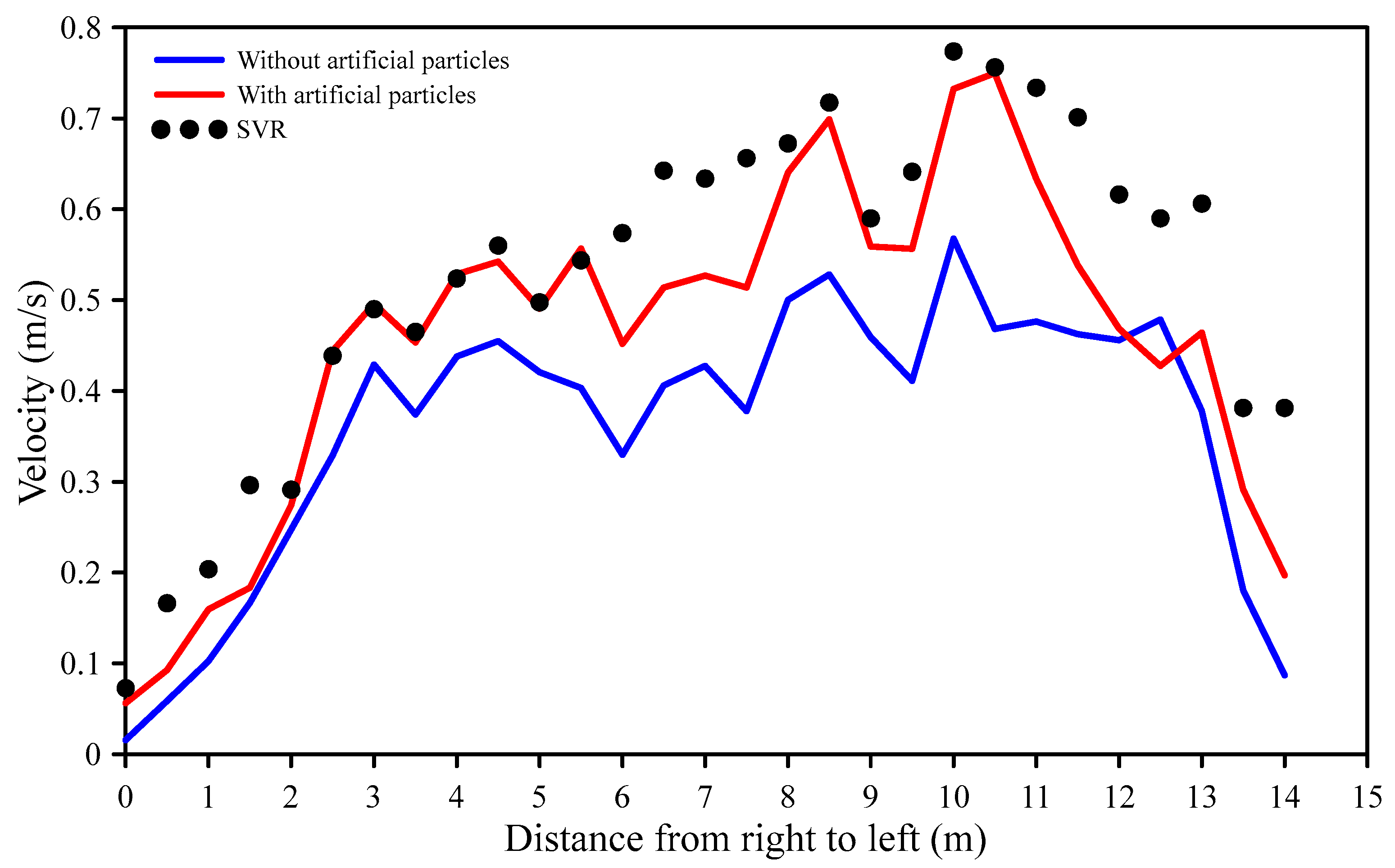
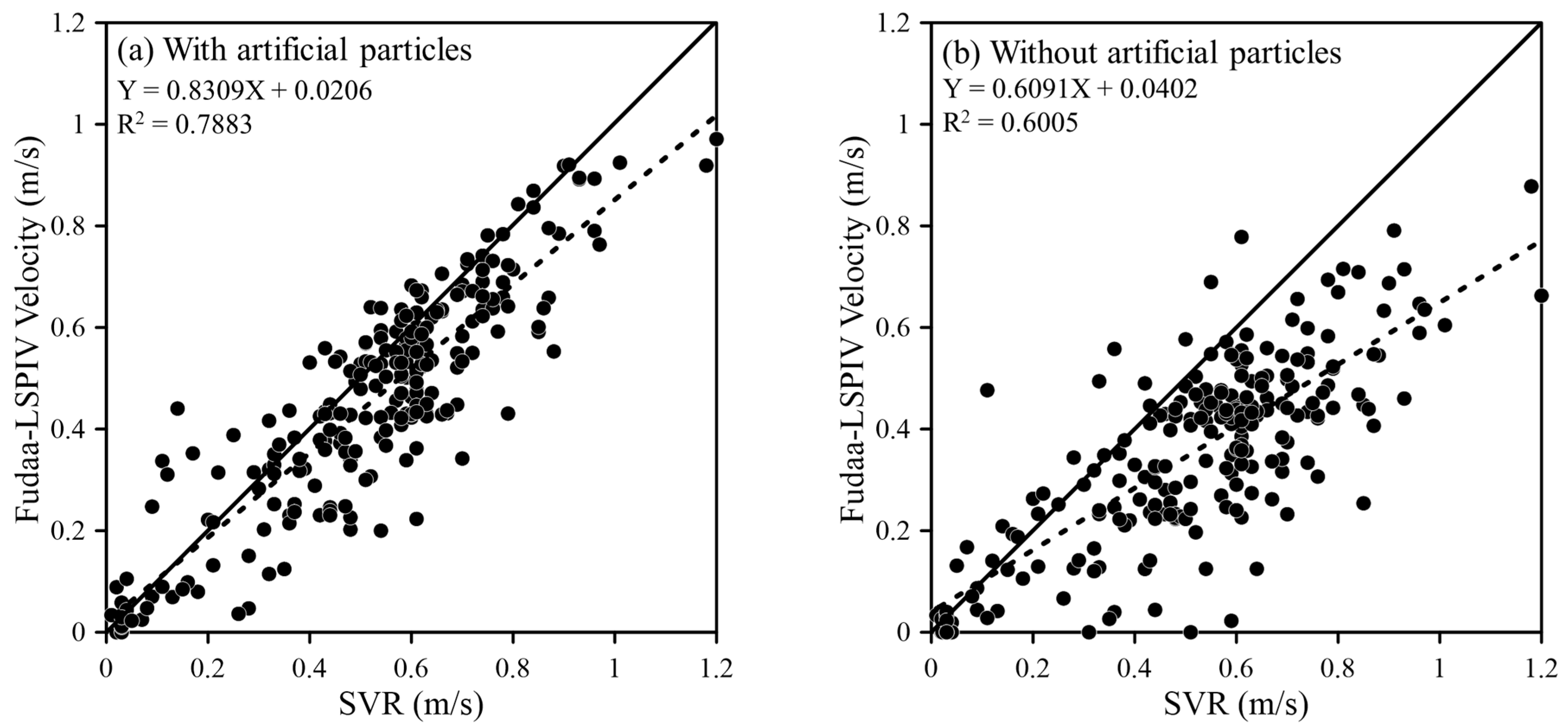
3.6. Influence of Artificial Particles on Surface Flow Measurement
4. Discussion
4.1. Specific Measurement on 11 July 2022
4.2. Advantages, Limitations, and Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, K.; Lee, J. Method for measuring the surface velocity field of a river using images acquired by a moving drone. Water 2023, 15, 53. [Google Scholar] [CrossRef]
- Liu, W.C.; Huang, W.C. Development of a three-axis accelerometer and large-scale particle image velocimetry (LSPIV) to enhance surface velocity measurements in rivers. Comput. Geosci. 2021, 155, 104866. [Google Scholar] [CrossRef]
- Eltner, A.; Sardemann, H.; Grundmann, J. Technical note: Flow velocity and discharge measurement in rivers using terrestrial and unmanned-aerial-vehicle imagery. Hydrol. Earth Syst. Sci. 2020, 24, 1429–1445. [Google Scholar] [CrossRef]
- Pearce, S.; Ljubicic, R.; Peña-Haro, S.; Perks, M.; Tauro, F.; Pizarro, A.; Dal Sasso, S.F.; Strelnikova, D.; Grimaldi, S.; Maddock, I.; et al. An evaluation of image velocimetry techniques under low flow conditions and high seeding densities using unmanned aerial systems. Remote Sens. 2020, 12, 232. [Google Scholar] [CrossRef]
- Jolley, M.J.; Russell, A.J.; Quinn, P.F.; Perks, M.T. Considerations when applying Large-Scale PIV and PTV for determining river flow velocity. Front. Water 2021, 3, 709269. [Google Scholar] [CrossRef]
- Bandini, F.; Frías, M.C.; Liu, J.; Simkus, K.; Karagkiolidou, S.; Bauer-Gottwein, P. Challenges with regard to Unmanned Aerial Systems (UASs) measurement of river surface velocity using Doppler radar. Remote Sens. 2022, 14, 1277. [Google Scholar] [CrossRef]
- Hou, J.; Yang, L.; Wang, X.; Chai, J.; Zhang, Z.; Li, X.; Shao, J.; Du, Y.; Bai, G. Adaptive large-scale particle image velocimetry method for physical model experiments of flood propagation with complex flow patterns. Measurement 2022, 198, 111309. [Google Scholar] [CrossRef]
- Rozos, E.; Mazi, K.; Koussis, A.D. Probabilistic evaluation and filtering of image velocimetry measurements. Water 2021, 13, 2206. [Google Scholar] [CrossRef]
- Masafu, C.; Williams, R.; Shi, X.; Yuan, Q.; Trigg, M. Unpiloted Aerial Vehicle (UAV) image velocimetry for validation of two-dimensional hydraulic model simulations. J. Hydrol. 2022, 612, 128217. [Google Scholar] [CrossRef]
- Ljubičić, R.; Strelnikova, D.; Perks, M.T.; Eltner, A.; Penã-Haro, S.; Pizarro, A.; Dal Sasso, S.F.; Scherling, U.; Vuono, P.; Manfreda, S. A comparison of tools and techniques for stabilising unmanned aerial system (UAS) imagery for surface flow observations. Hydrol. Earth Syst. Sci. 2021, 25, 5105–5132. [Google Scholar] [CrossRef]
- Thielicke, W.; Stamhuis, E.J. PIVlab—Towards user-friendly, affordable and accurate digital particle image velocimetry in MATLAB. J. Open Res. Softw. 2014, 2, 30. [Google Scholar] [CrossRef]
- Ben-Gida, H.; Gurka, R.; Liberzon, A. OpenPIV-MATLAB-An open-source software for particle image velocimetry; test case: Birds’ aerodynamics. SoftwareX 2020, 12, 100585. [Google Scholar] [CrossRef]
- Le Coz, J.; Jodeau, M.; Hauet, A.; Marchand, B.; Boursicaud, R. Image-based velocity and discharge measurements in field and laboratory river engineering studies using the free FUDAA-LSPIV software. Proc. Intern. Conf. Fluv. Hydraul. River Flow 2014, 2014, 1961–1967. [Google Scholar]
- Jodeau, M.; Le Coz, J.; Bercovitz, Y.; Lebert, F. Laboratory and field lspiv measurements of flow velocities using Fudaa-LSPIV a free user-friendly software Fudaa-lspiv: A user friendly software View project Passive Acoustic Monitoring View project. In Proceedings of the HydroSensoft Conference, HydroSenSoft, International Symposium and Exhibition on Hydro-Environment Sensors and Software, Madrid, Spain, 1–3 March 2017. [Google Scholar]
- Perks, M.T. KLT-IV v1.0: Image velocimetry software for use with fixed and mobile platforms. Geosci. Model Dev. 2020, 13, 6111–6130. [Google Scholar] [CrossRef]
- Fujita, I.; Watanabe, H.; Tsubaki, R. Development of a non-intrusive and efficient flow monitoring technique: The space-time image velocimetry (STIV). Int. J. River Basin Manag. 2007, 5, 105–114. [Google Scholar] [CrossRef]
- Patalano, A.; García, C.M.; Rodríguez, A. Rectification of image velocity results (RIVeR): A simple and user-friendly toolbox for large scale water surface particle image velocimetry (PIV) and particle tracking velocimetry (PTV). Comput. Geosci. 2017, 109, 323–330. [Google Scholar] [CrossRef]
- Fujita, I.; Notoya, Y.; Tani, K.; Tateguchi, S. Efficient and accurate estimation of water surface velocity in STIV. Environ. Fluid Mech. 2019, 19, 1363–1378. [Google Scholar] [CrossRef]
- Lu, J.; Yang, X.; Wang, J. Velocity vector estimation of two-dimensional flow field based on STIV. Sensors 2023, 23, 955. [Google Scholar] [CrossRef]
- Hutley, N.R.; Beecroft, R.; Wagenaar, D.; Soutar, J.; Edwards, B.; Deering, N.; Grinham, A.; Albert, S. Adaptively monitoring streamflow using a stereo computer vision system. Hydrol. Earth Syst. Sci. 2023, 27, 2051–2073. [Google Scholar] [CrossRef]
- Tauro, F.; Petroselli, A.; Arcangeletti, E. Assessment of drone-based surface flow observations. Hydrol. Proc. 2016, 30, 1114–1130. [Google Scholar] [CrossRef]
- Huang, W.C.; Young, C.C.; Liu, W.C. Application of an automated discharge imaging system and LSPIV during typhoon events in Taiwan. Water 2018, 10, 280. [Google Scholar] [CrossRef]
- Liu, W.C.; Lu, C.H.; Huang, W.C. Large-scale particle velocimetry to measure streamflow from videos from unmanned aerial vehicle and fixed imaging system. Remote Sens. 2021, 13, 2661. [Google Scholar] [CrossRef]
- Pena-Haro, S.; Carrel, M.; Luthi, B.; Hansen, I.; Lukes, R. Robust image-based streamflow measurements for real-time continuous monitoring. Front. Water 2021, 3, 766918. [Google Scholar] [CrossRef]
- Lewis, Q.W.; Rhoads, B.L. LSPIV measurements of two-dimensional flow structure in stream using small unmanned aerial systems: 2. Hydrodynamic mapping at river confluences. Water Resour. Res. 2018, 54, 7891–7999. [Google Scholar] [CrossRef]
- Acharya, B.S.; Bhandari, M.; Bandini, F.; Pizarro, A.; Perks, M.; Joshi, D.R.; Wang, S.; Dogwiler, T.; Ray, R.L.; Kharel, G.; et al. Unmanned aerial vehicles in hydrology and water management: Applications, challenges, and perspectives. Water Resour. Res. 2021, 57, e2021WR029925. [Google Scholar] [CrossRef]
- Eskandari, R.; Mahdianpari, M.; Mohammadimanesh, F.; Salehi, B.; Brisco, B.; Homayouni, S. Meta-analysis of unmanned aerial vehicle (UAV) imagery for agro-environmental monitoring using machine learning and statistical models. Remote Sens. 2020, 12, 3511. [Google Scholar] [CrossRef]
- Federman, A.; Shrestha, S.; Quintero, M.S.; Mezzino, D.; Gregg, J.; Kretz, S.; Ouimet, C. Unmanned Aerial Vehicles (UAV) photogrammetry in the conservation of historic places: Carleton Immersive Media Studio case studies. Drones 2018, 2, 18. [Google Scholar] [CrossRef]
- Strelnikova, D.; Paulus, G.; Käfer, S.; Anders, K.H.; Mayr, P.; Mader, H.; Scherling, U.; Schneeberger, R. Drone-based optical measurements of heterogeneous surface velocity fields around fish passages at hydropower dams. Remote Sens. 2020, 12, 384. [Google Scholar] [CrossRef]
- Dal Sasso, S.F.; Pizarro, A.; Manfreda, S. Metrics for the quantification of seeding characteristics to enhance image velocimetry performance in rivers. Remote Sens. 2020, 12, 1789. [Google Scholar] [CrossRef]
- Legleiter, C.; Kinzel, P. Inferring surface flow velocities in sediment-laden Alaskan Rivers from optical image sequences acquired from a helicopter. Remote Sens. 2020, 12, 1282. [Google Scholar] [CrossRef]
- Welber, M.; Le Coz, J.; Jonathan, B.L.; Zolezzi, G.; Zamler, D.; Dramais, G.; Hauet, A.; Salvaro, M. Field assessment of noncontact stream gauging using portable surface velocity radars (SVR). Water Resour. Res. 2016, 52, 1108–1126. [Google Scholar] [CrossRef]
- Son, G.; Kim, D.; Kim, K.; Roh, Y. Performance of a rectangular-shaped surface velocity radar for river velocity measurements. KSCE J. Civ. Eng. 2023, 27, 1077–1092. [Google Scholar] [CrossRef]
- Rozos, E.; Dimitriadis, P.; Mazi, K.; Lykoudis, S.; Koussis, A. On the uncertainty of the image velocimetry method parameters. Hydrology 2020, 7, 65. [Google Scholar] [CrossRef]
- Caridi, G.C.A.; Torta, E.; Mazzi, V.; Chiastra, C.; Audenino, A.L.; Morbiducci, U.; Gallo, D. Smartphone-based particle image velocimetry for cardiovascular flows applications: A focus on coronary arteries. Front. Bioeng. Biotechnol. 2020, 10, 1011806. [Google Scholar] [CrossRef] [PubMed]
- Biggs, H.J.; Smith, B.; Detert, M.; Sutton, H. Surface image velocimetry: Aerial tracer particle distribution system and techniques for reducing environmental noise with coloured tracer particles. River Res. Appl. 2022, 38, 1192–1198. [Google Scholar] [CrossRef]
- Dal Sasso, S.F.; Pizarro, A.; Pearce, S.; Maddock, I.; Manfreda, S. Increasing LSPIV performances by exploiting the seeding distribution index at different spatial scales. J. Hydrol. 2021, 598, 126438. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, H.; Liu, B.; Liu, W.; Xu, C.Y.; Guo, S.; Wang, J. An improvement of the Space-Time Image Velocimetry combined with a new denoising method for estimating river discharge. Flow Meas. Instrum. 2021, 77, 101864. [Google Scholar] [CrossRef]
- Ho, H.C.; Chiu, Y.W.; Chen, T.Y.; Lin, Y.C. Flow measurement in open channel using imaging techniques in conjunction with a convolutional neural network. J. Hydrol. 2023, 618, 129183. [Google Scholar] [CrossRef]
- Morrell, M.C.; Hickmann, K.; Wilson, B. Particle image velocimetry analysis with simultaneous uncertainty qualification using Bayesian neural network. Meas. Sci. Technol. 2021, 32, 104003. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Velocimetry Software | Overview of the Software | Requirement |
|---|---|---|
| PIVlab (Version 2.0) | PIVlab comprises three primary stages. Initially, in the pre-processing phase, it employs contrast-limited adaptive histogram equalization (CLAHE) as the default setting, which effectively enhances image contrast. Subsequently, during the image analysis stage, PIVlab employs three distinct correlation algorithms: direct cross correlation (DCC), fast Fourier transformation (FFT), and ensemble correlation. Finally, in the post-processing phase of PIVlab, velocity-based validation and image-based validation techniques are employed. | This method does not require the provision of control point data, but it does require the provision of a scale for the pixel size and real-space length. The user has the authority to define the IA, step, and calibration. |
| Fudaa-LSPIV (Version 1.8.1) | Fudaa-LSPIV involves three primary stages. To begin, the pre-processing phase encompasses the density of points of interest, an image stabilization model, and orthorectification. Following that, the image analysis stage employs cross-correlation statistical analysis by defining the IA, SA, and grid size. Finally, in the post-processing stage, a standard velocity filter is applied in the vx and vy directions. | The user is responsible for inputting values for the IA, SA, and data with at least four control point coordinates. The choices for density of points of interest and the image transformation model adapt to the specific conditions of the river. This method of orthorectification is contingent upon the extent of camera shake and the quality of the captured images. |
| OpenPIV (https://github.com/ElsevierSoftwareX/SOFTX-D-20-00014. Accessed on 8 March 2021) | OpenPIV employs a spatial analysis toolbox for conducting spectral and characteristic analysis of the flow field. To utilize OpenPIV effectively, one is required to provide input parameters such as the IA value, spacing size, and a feature threshold that distinguishes between true and false vector values, depending on the Signal-to-Noise (S/N) ratio. | This method does not require the provision of control point data but requires the provision of a scale for the pixel size and real-world length. The user is tasked with specifying the IA and spacing size. The Signal-to-Noise (S/N) ratio parameter is designed to minimize the uncertainty associated with the resulting PIV measurement. Additionally, users provide input for the scale and time step (dt). |
| KLT-IV (Version 1.0) | KLT-IV employs the particle tracking velocimetry (PTV) method to detect motion on the water surface, and its available options are tailored to align with field and environmental conditions [15]. Within KLT-IV, users can specify the camera type and orientations, and the workflow is contingent upon the chosen camera orientations. | Ground control points (GCPs) are specified based on both their physical location and corresponding pixel coordinates, typically requiring a minimum of four points for calibration. The determination of camera location and orientation is contingent on the camera type selected. Users establish values for the block size and extract rate for the analysis. |
| RIVeR-STIV (Version 2.4.1) | In the context of velocity analysis, RIVeR-STIV utilizes a searching line, represented as a straight line. STIV conducts its analysis based on light contrast within images, necessitating the use of filters like CLAHE, Gaussian Blur, and FFT (both vertically and horizontally) to enhance the image quality and accuracy. | A minimum of four points is required for the ground control points (GCPs). In the analysis process, essential parameters include the time step, window size, and the selection of a straight-line segment for the specific area of interest. The application of filters such as CLAHE, Gaussian Blur, and FFT (both vertical and horizontal stripes) is aimed at enhancing the visibility and clarity of the particles on the water surface. |
| Date | 16 April 2022 | 5 July 2022 | 7 July 2022 | 23 August 2022 | 18 September 2022 |
|---|---|---|---|---|---|
| Benchmark (along cross-section) | Every 0.5 m 24 points | Every 0.5 m 42 points | Every 0.5 m 39 points | Every 0.5 m 24 points | Every 0.5 m 24 points |
| Particles release (Kg) | N | N | N | N 0.5 1.0 1.5 | N 0.5 1.0 1.5 |
| Discharge (m3/s) | 2.2 | 10.6 | 6.9 | 2.6 | 2.4 |
| Software | Advantages | Limitations |
|---|---|---|
| PIVlab | ●Visualizes full field vector information ●Has pre-processing and post-processing, which enhances the images ●Can choose to perform single passes or multiple passes ●Does not require a lot of ground control points ●The process of analyzing the velocity of the water surface is fast | ●Sensitive to changes in the IA. ●Sensitive to particles on the surface of the water ●Users have to perform trial and error to obtain more accurate results |
| Fudaa-LSPIV | ●Visualizes full field vector information ●Has clear information about the stabilization parameters and orthorectification ●Has a grid so that the visualized vector is clear and neat | ●Sensitive to changes in the IA. ●Sensitive to particles on the surface of the water ●The analysis process takes longer |
| OpenPIV | ●Visualizes full field vector information ●The process of analyzing the velocity of the water surface is fast ●The simple GUI display makes it easy for the user to understand the process | ●Sensitive to changes in the IA. ●The parameter S/N value must be carried out via trial and error to obtain the best results |
| KLT-IV | ●Changing block size does not influence the water surface velocity analysis ●Many options for different camera and field conditions ●Clearly visualizes the trajectories of the flow field | ●Sensitive to changes in the extraction rate; even a small change will change the trajectory intensity ●For conditions requiring GCPs, camera shake affects the resulting trajectories ●User experience is needed to adjust the KLT-IV parameters and hydrological environmental conditions |
| STIV | ●The analysis process is fast because the analysis is only one-dimensional ●Allows flexibility to adapt to different flow conditions | ●Limitations in analyzing wide areas because it is limited to only one cross section ●Sensitive to changes in the IA and length of the search line ●Although there is a filter to adjust the illumination of the image, it still requires trial and error to obtain acceptable results |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wijaya, F.; Liu, W.-C.; Suharyanto; Huang, W.-C. Comparative Assessment of Different Image Velocimetry Techniques for Measuring River Velocities Using Unmanned Aerial Vehicle Imagery. Water 2023, 15, 3941. https://doi.org/10.3390/w15223941
Wijaya F, Liu W-C, Suharyanto, Huang W-C. Comparative Assessment of Different Image Velocimetry Techniques for Measuring River Velocities Using Unmanned Aerial Vehicle Imagery. Water. 2023; 15(22):3941. https://doi.org/10.3390/w15223941
Chicago/Turabian StyleWijaya, Firnandino, Wen-Cheng Liu, Suharyanto, and Wei-Che Huang. 2023. "Comparative Assessment of Different Image Velocimetry Techniques for Measuring River Velocities Using Unmanned Aerial Vehicle Imagery" Water 15, no. 22: 3941. https://doi.org/10.3390/w15223941
APA StyleWijaya, F., Liu, W.-C., Suharyanto, & Huang, W.-C. (2023). Comparative Assessment of Different Image Velocimetry Techniques for Measuring River Velocities Using Unmanned Aerial Vehicle Imagery. Water, 15(22), 3941. https://doi.org/10.3390/w15223941