
Effect of Groundwater Level Rise on the Critical Velocity of High-Speed Railway

Abstract
:1. Introduction
2. Theoretical Solution Method
2.1. Biot’s Porous Media Theory
2.2. 2.5D Finite Element Solution
2.3. Train-Track-Embankment Coupling
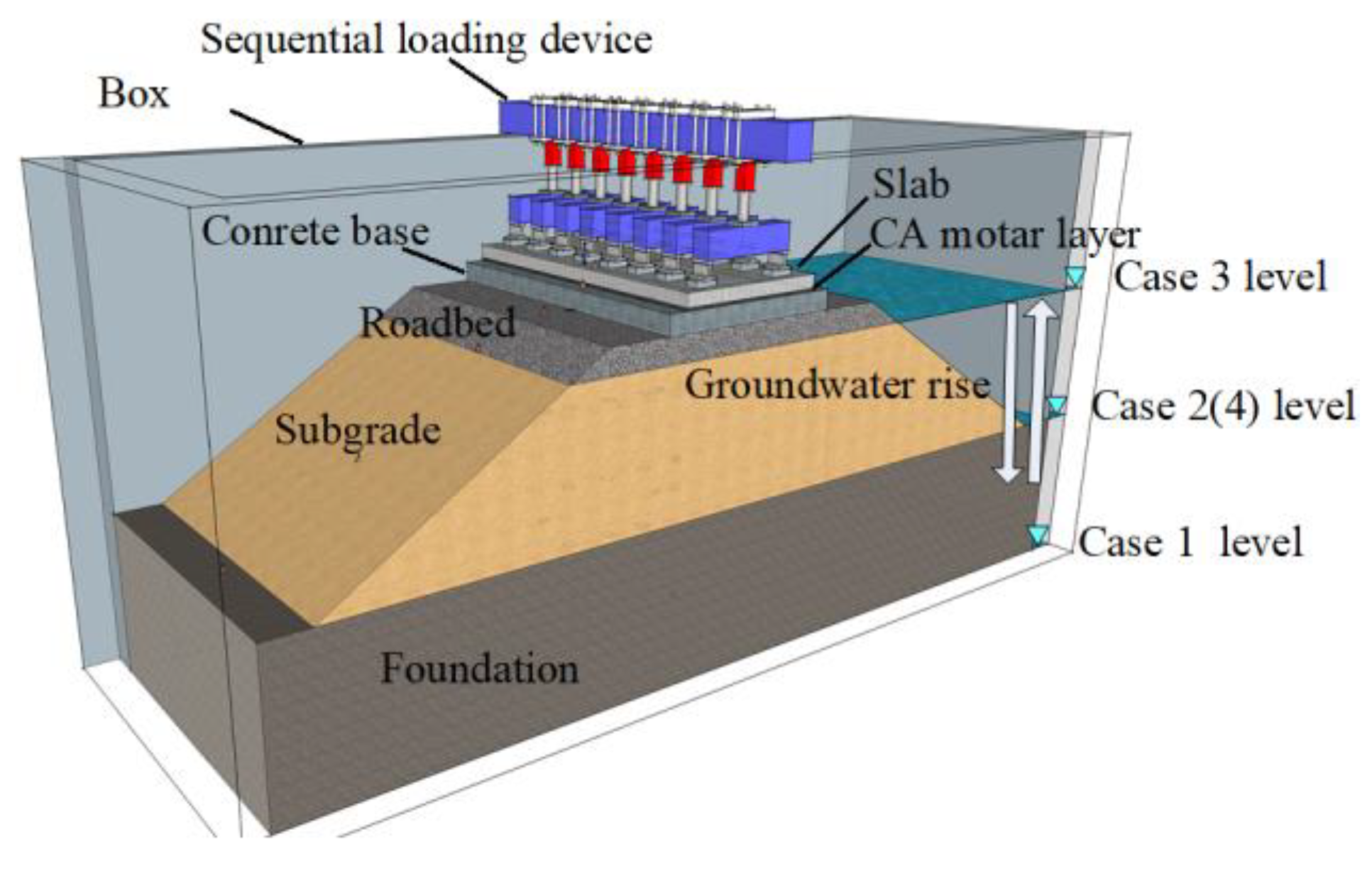
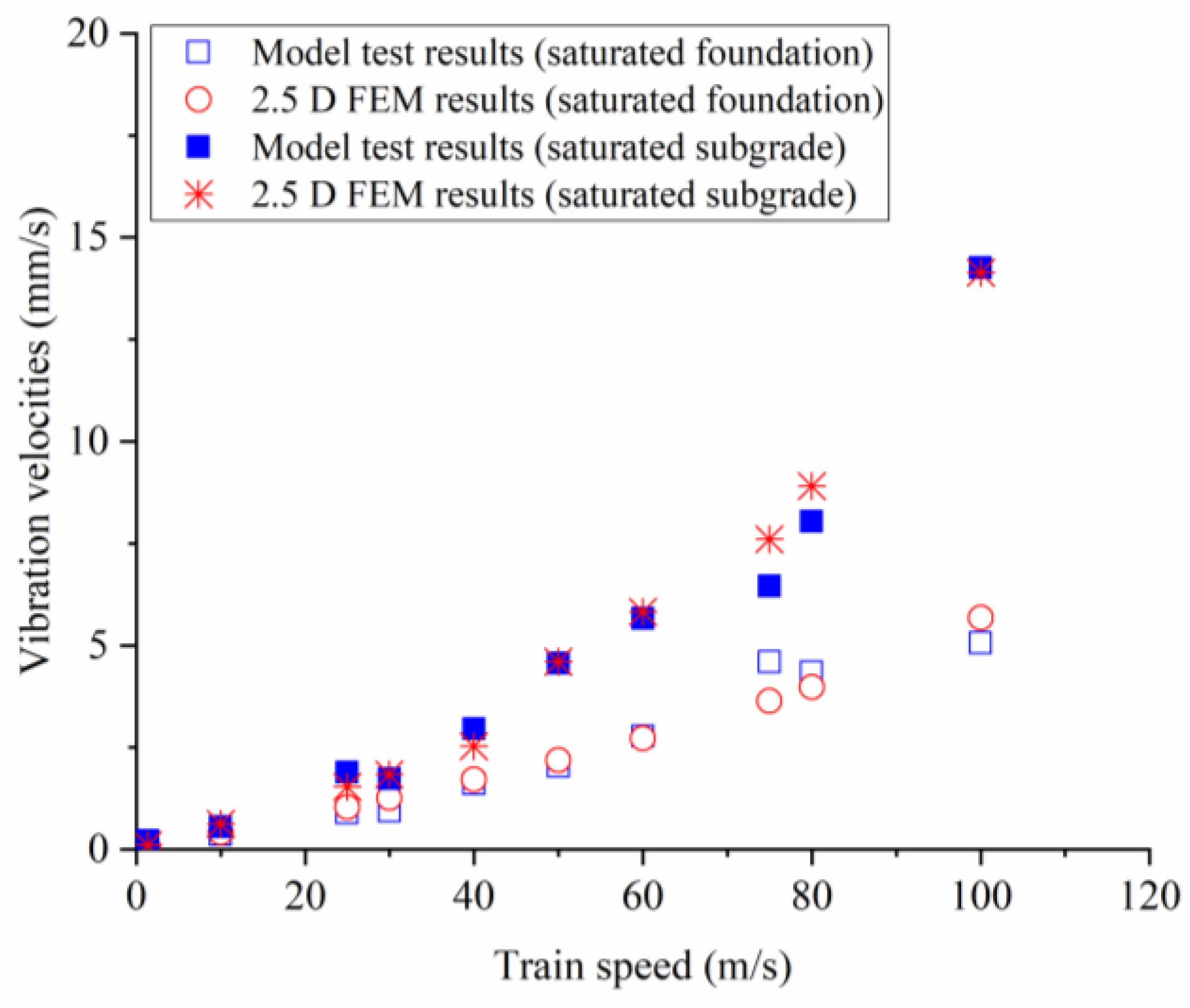
2.4. Model Validation
3. Numerical Modelling
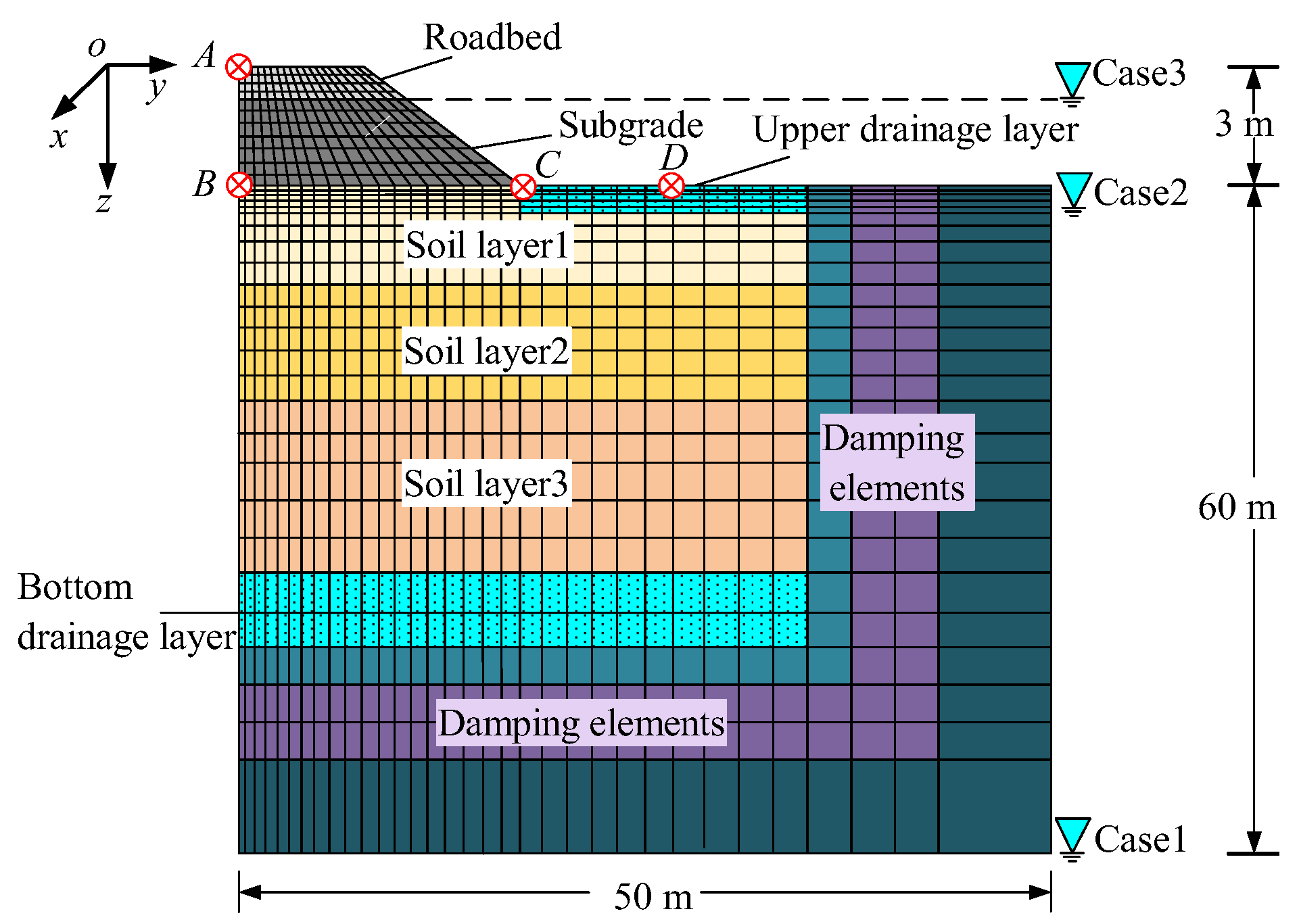
3.1. Introduction of the Model
3.2. Calculated Cases
4. Numerical Analysis
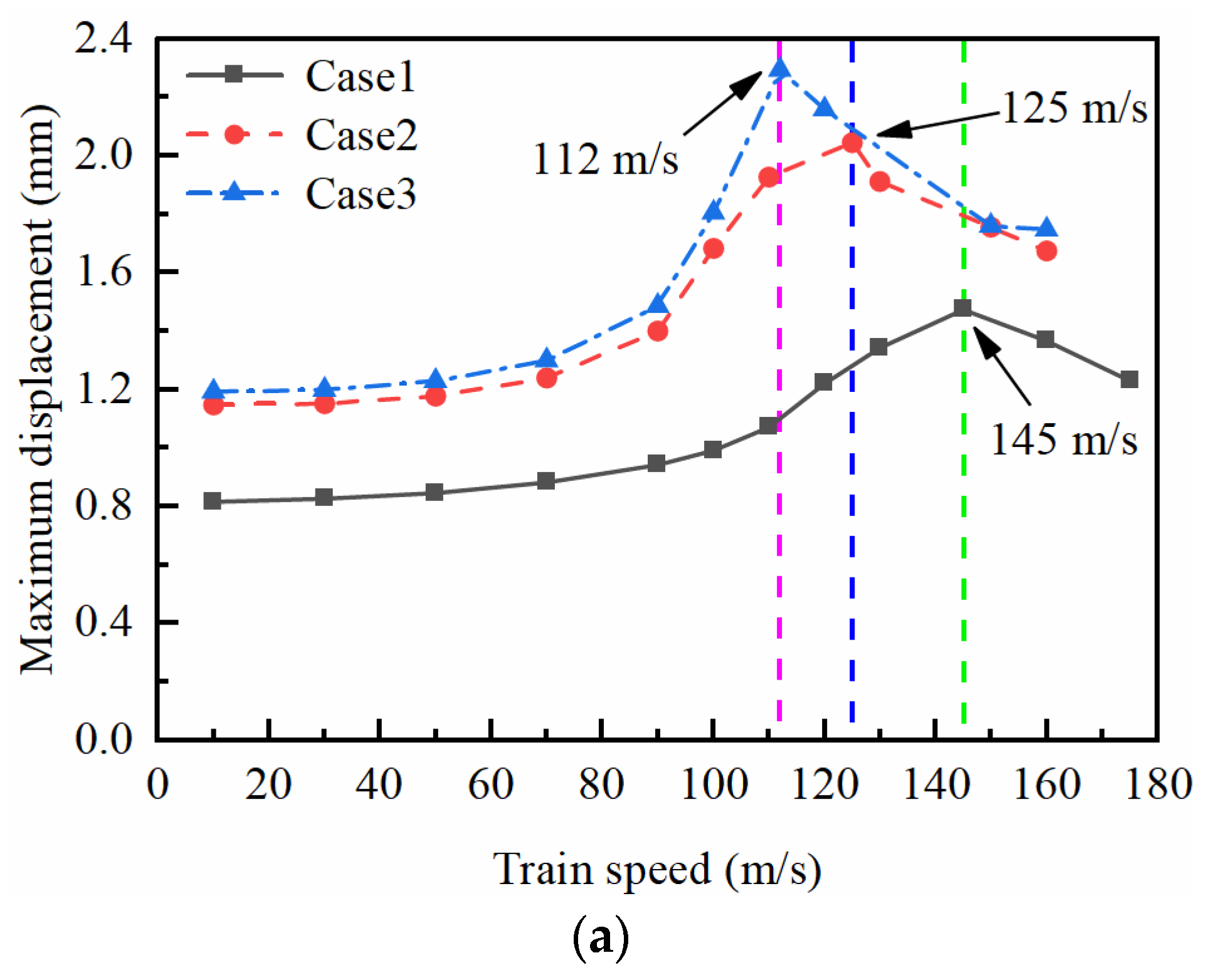
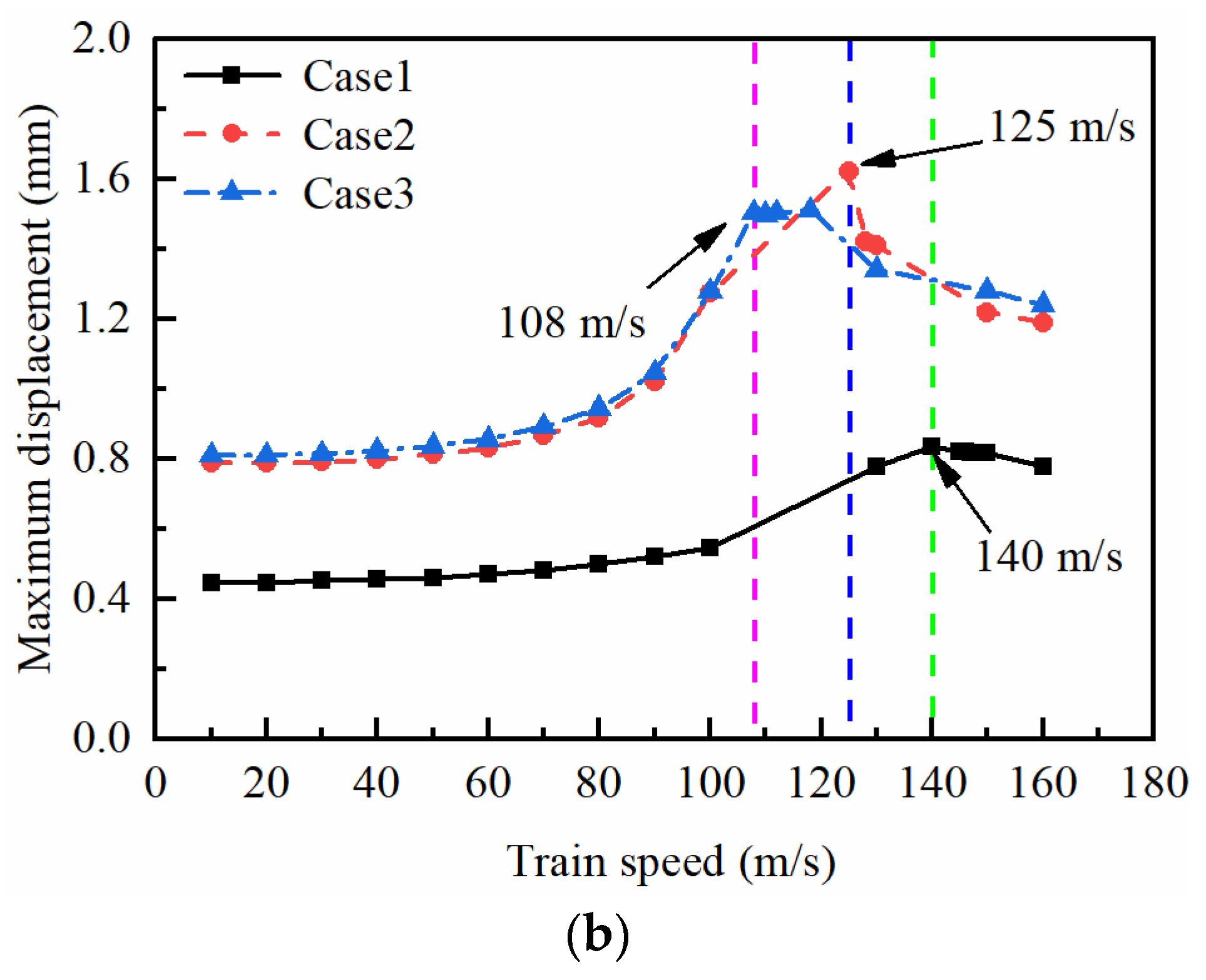
4.1. Critical Velocity
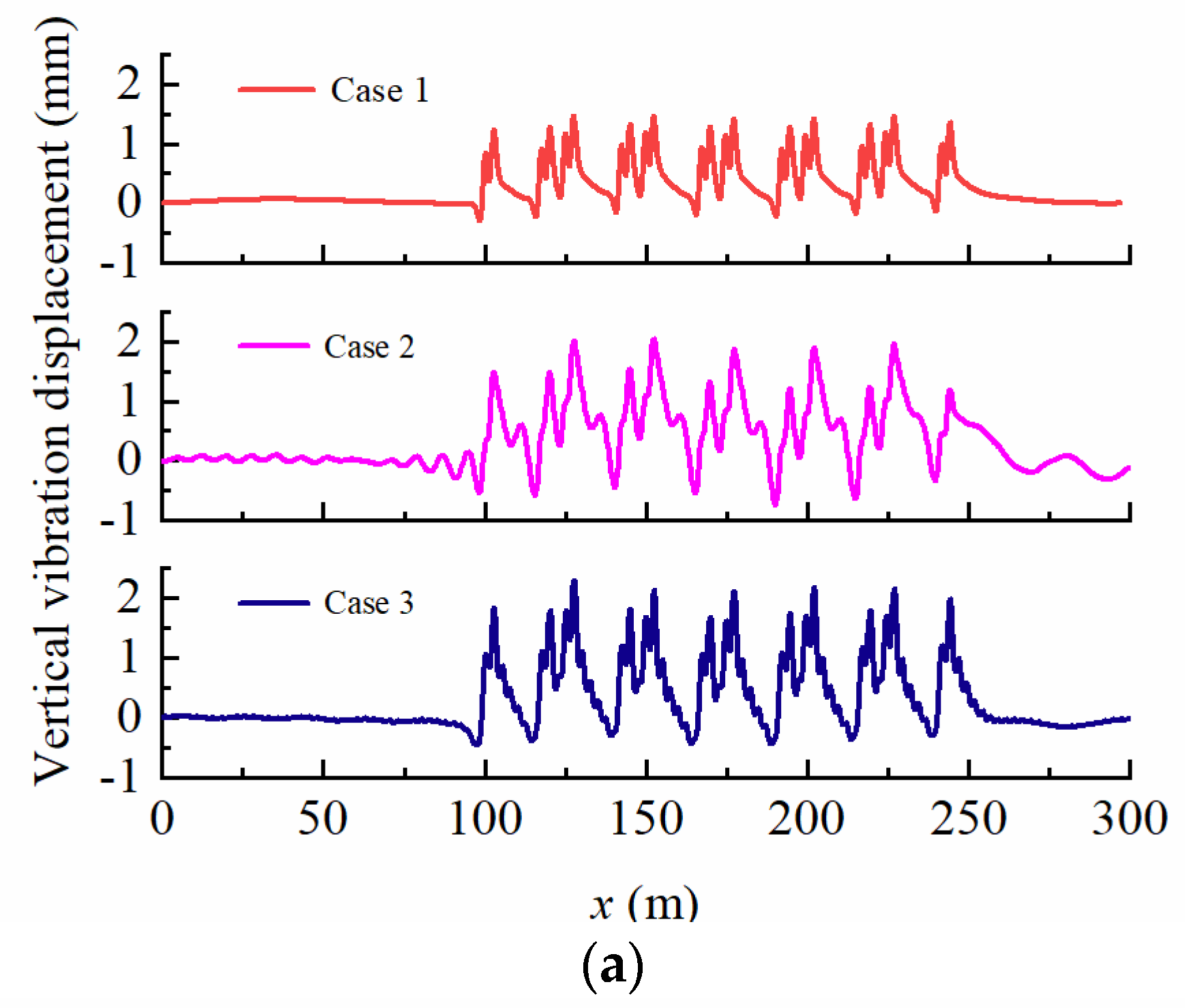
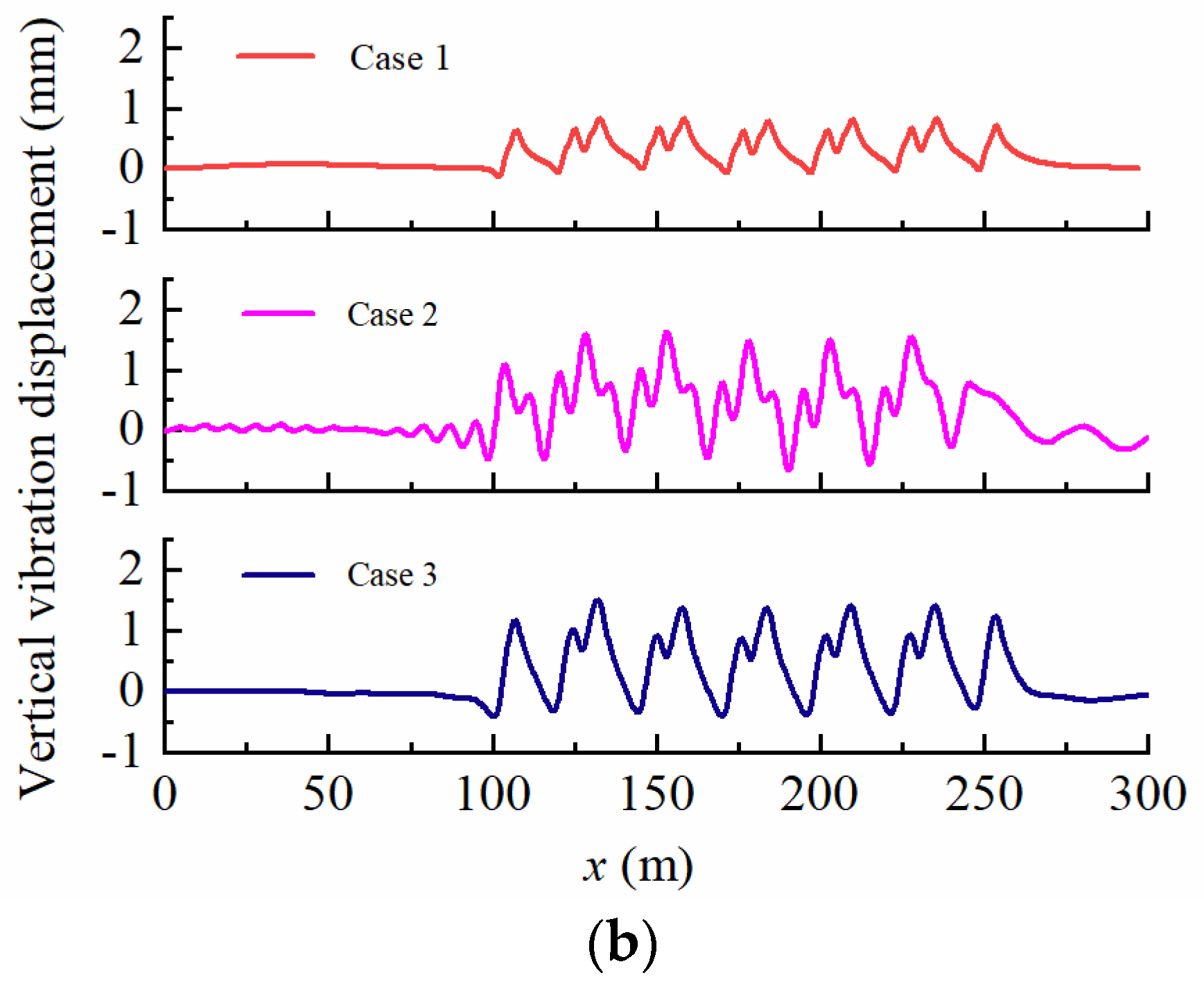
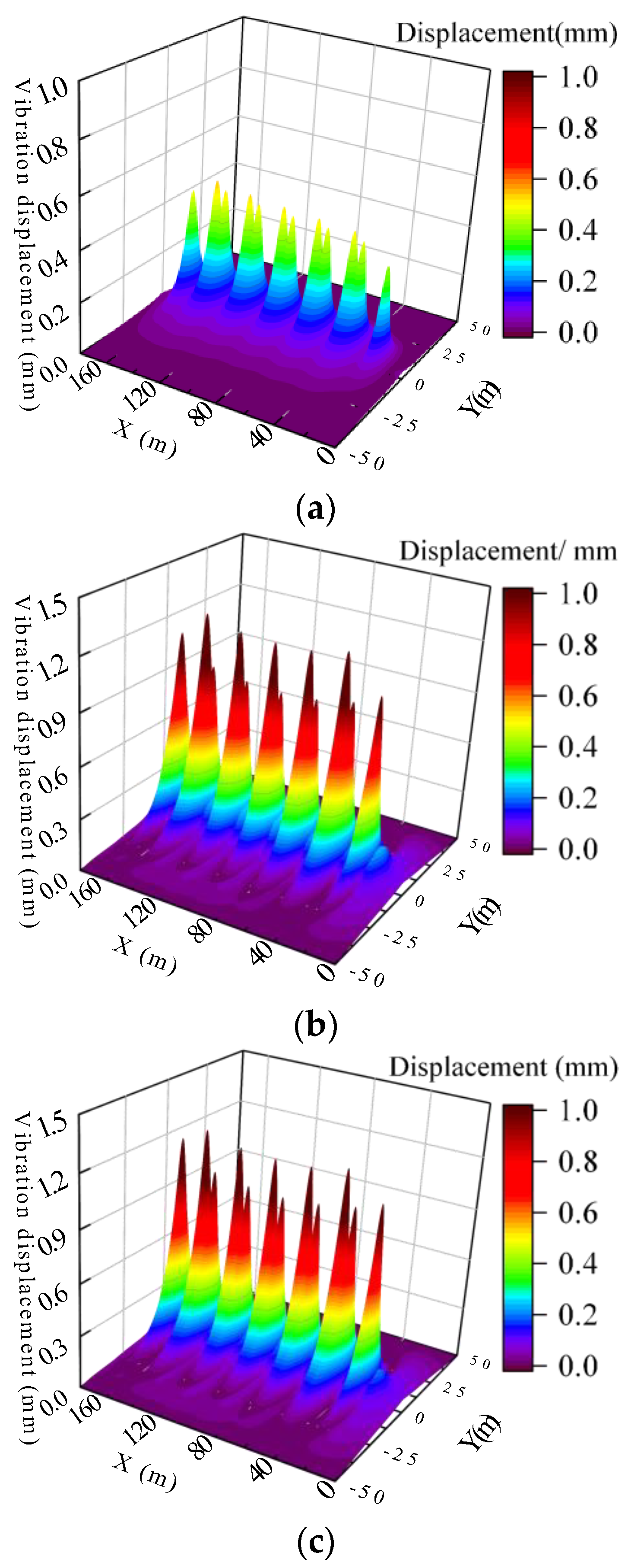
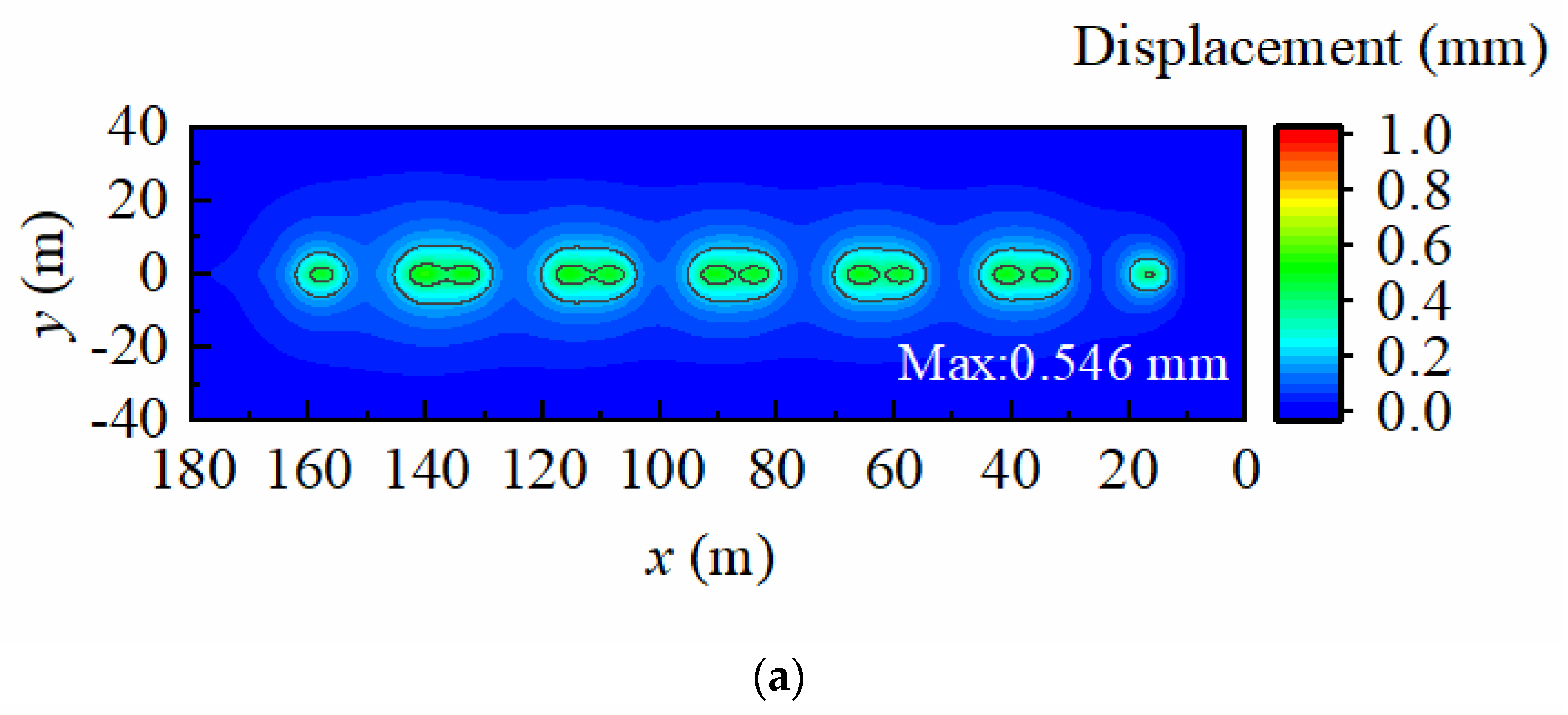
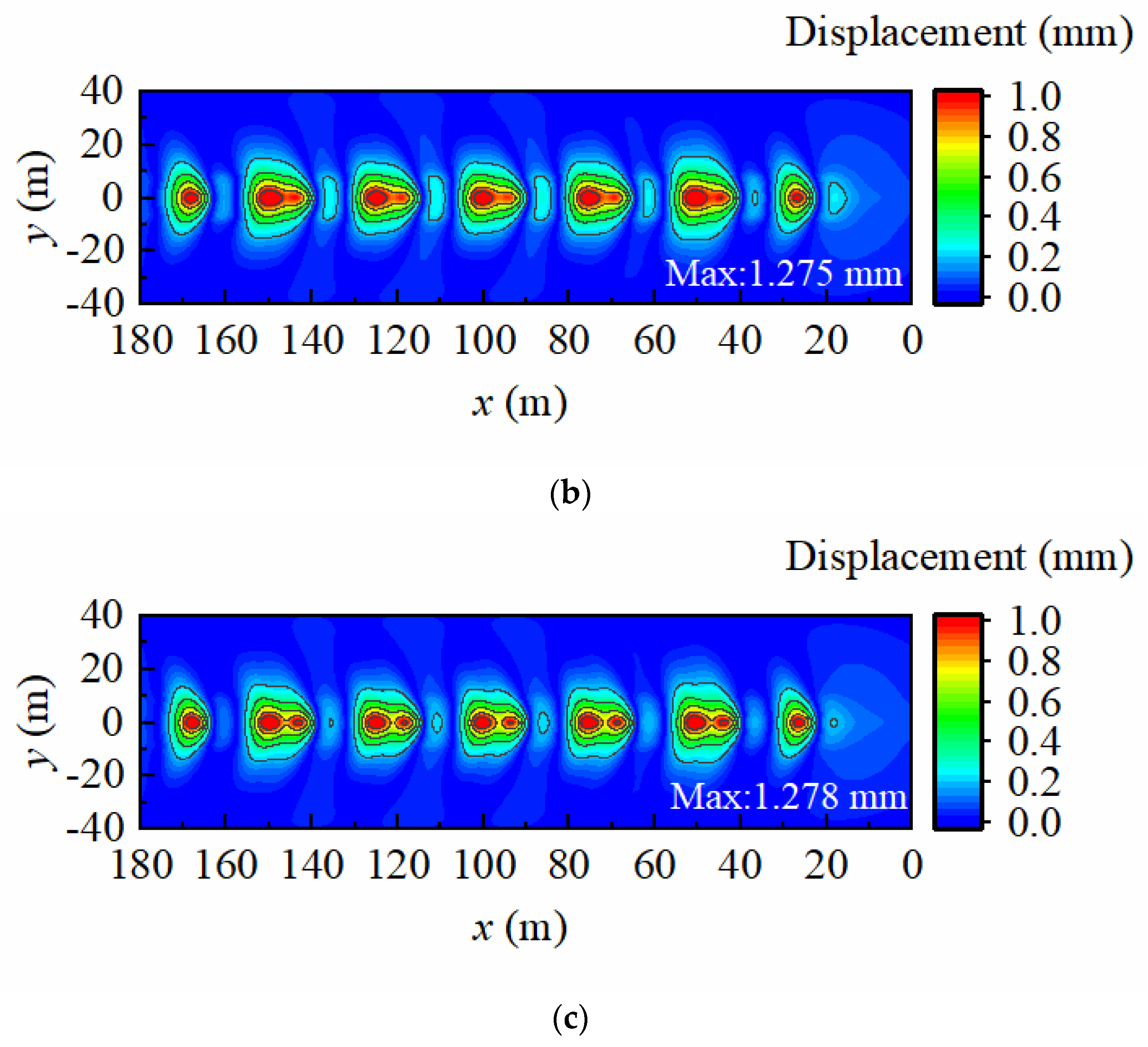
4.2. Dynamic Response in the Foundation
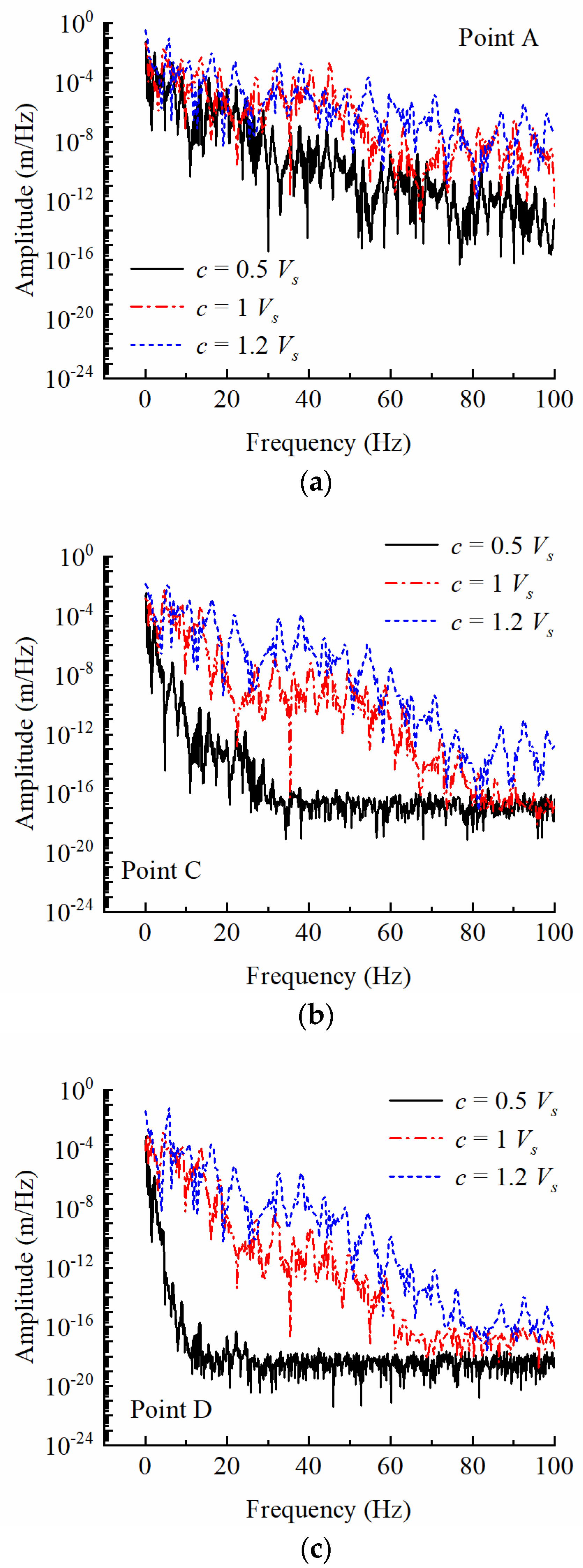
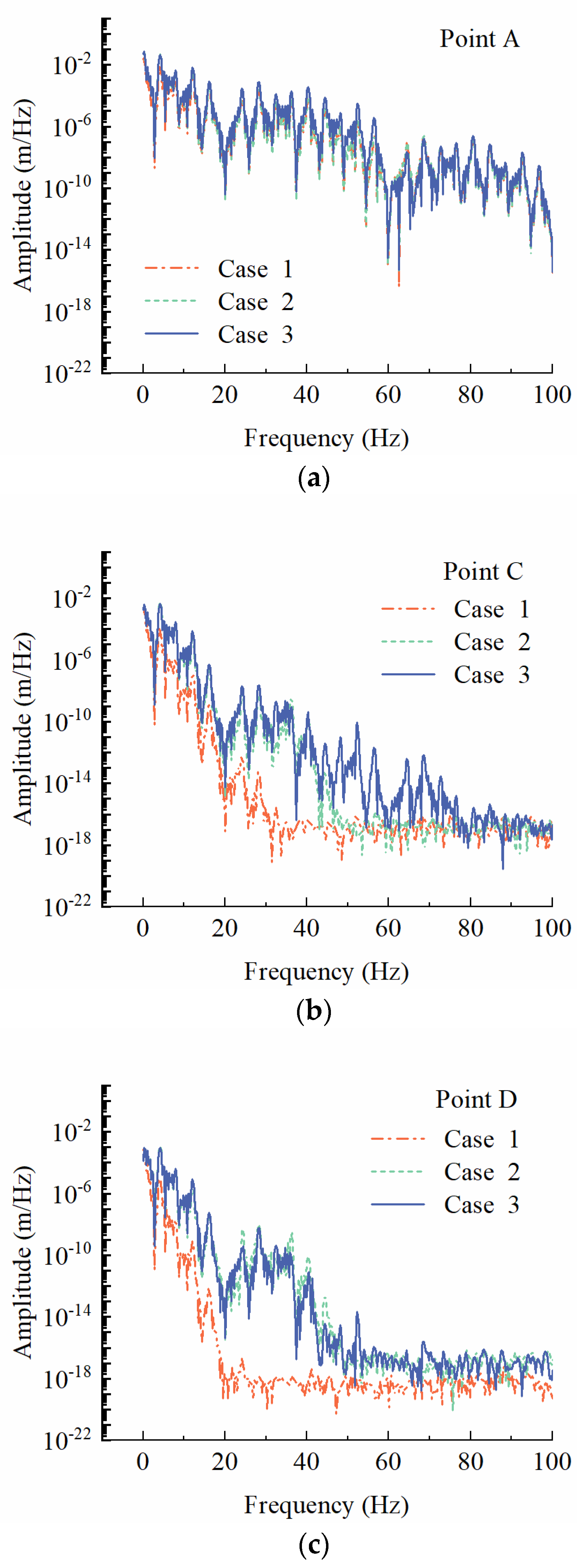
4.3. Displacement Response Spectrum
5. Summary and Conclusions
- (1)
- The critical velocity of the high-speed railway consistently decreases with the groundwater level rise. Moreover, the rise of the groundwater level within the embankment exerts a more pronounced influence on the system’s critical velocity compared to the rise in groundwater level within the foundation. This underscores the significance of effective embankment waterproofing in controlling track vibrations;
- (2)
- Train operations can induce deformation in both the embankment and foundation, with deformation significantly increasing as the groundwater level rises. In particular, when the groundwater level ascends from the foundation bottom to the subgrade surface, the deformation of the subgrade surface escalates by approximately 55%;
- (3)
- The frequency spectrum of ground vibration increases significantly in the high-frequency region with the rising groundwater levels, and this increase affects a wider frequency range as the water level rises;
- (4)
- This study indicates that the increase in groundwater level not only amplifies vibrations but also contributes to the extended propagation of high-frequency vibrations. Consequently, a more comprehensive analysis of the correlation between vibration propagation mechanisms and rising groundwater levels is imperative for future research;
- (5)
- A limitation of this study is that the materials in the model are simulated using isotropic linear elastic properties. Future research could explore the anisotropic nature of materials and the polyphase composition of the media for a more comprehensive understanding.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, C.S.; Zhou, Y.; Zhang, S.N.; Wang, J.T.; Liu, F.M.; Gong, C.; Yi, C.Y.; Li, L.; Zhou, H.; Wei, L.S.; et al. Groundwater resources in the Yangtze River Basin and its current development and utilization. Geol. China 2021, 48, 979–1000. (In Chinese) [Google Scholar]
- Feng, K. Spatiotemporal pattern evolution of rainstorms with different intensities in China. J. Landsc. Res. 2019, 11, 51–58. (In Chinese) [Google Scholar]
- Hu, J.; Bian, X.; Jiang, J. Critical velocity of high-speed train running on soft soil and induced dynamic soil response. Procedia Eng. 2016, 143, 1034–1042. [Google Scholar] [CrossRef]
- Costa, P.A.; Colaço, A.; Calçada, R.; Cardoso, A.S. Critical speed of railway tracks: Detailed and simplified approaches. Transp. Geotech. 2015, 2, 30–46. [Google Scholar] [CrossRef]
- Kaynia, A.M.; Madshus, C.; Zackrisson, P. Ground vibration from high-speed trains: Prediction and countermeasure. J. Geotech. Geoenviron. Eng. 2000, 126, 531–537. [Google Scholar] [CrossRef]
- Auersch, L. The effect of critically moving loads on the vibrations of soft soils and isolated railway tracks. J. Sound Vib. 2008, 310, 587–607. [Google Scholar] [CrossRef]
- Bian, X.; Cheng, C.; Jiang, J.; Chen, R.; Chen, Y. Numerical analysis of soil vibrations due to trains moving at critical speed. Acta Geotech. 2016, 11, 281–294. [Google Scholar] [CrossRef]
- Fernández-Ruiz, J.; Castanheira-Pinto, A.; Costa, P.A.; Connolly, D.P. Influence of non-linear soil properties on railway critical speed. Constr. Build. Mater. 2022, 335, 127485. [Google Scholar] [CrossRef]
- Castanheira-Pinto, A.; Colaço, A.; Ruiz, J.F.; Costa, P.A.; Godinho, L. Simplified approach for ground reinforcement design to enhance critical speed. Soil Dyn. Earthq. Eng. 2022, 153, 107078. [Google Scholar] [CrossRef]
- Castanheira-Pinto, A.; Fernández-Ruiz, J.; Costa, P.A. Predicting the non-linear critical speed for high-speed railways in singular geotechnical scenarios. Soil Dyn. Earthq. Eng. 2023, 165, 107722. [Google Scholar] [CrossRef]
- Bian, X.; Hu, J.; Thompson, D.; Powrie, W. Pore pressure generation in a poro-elastic soil under moving train loads. Soil Dyn. Earthq. Eng. 2019, 125, 105711. [Google Scholar] [CrossRef]
- Hu, J.; Tang, Y.; Zhang, J.K.; Deng, T. Dynamic responses of saturated soft soil foundation under high-speed train load. Rock Soil Mech. 2021, 42, 3169–3181. (In Chinese) [Google Scholar]
- Lu, J.-F.; Jeng, D.-S. A half-space saturated poro-elastic medium subjected to a moving point load. Int. J. Solids Struct. 2007, 44, 573–586. [Google Scholar] [CrossRef]
- Zhou, S.H.; He, C.; Di, H.G. Dynamic 2.5-D green׳ s function for a poroelastic half-space. Eng. Anal. Bound. Elem. 2016, 67, 96–107. [Google Scholar] [CrossRef]
- Zhou, S.; He, C.; Guo, P.; Yu, F. Dynamic response of a segmented tunnel in saturated soil using a 2.5-D FE-BE methodology. Soil Dyn. Earthq. Eng. 2019, 120, 386–397. [Google Scholar] [CrossRef]
- Thom, N.H.; Brown, S.F. Effect of moisture on the structural performance of a crushed-limestone road base. Transp. Res. Rec. 1987, 1121, 50–56. [Google Scholar]
- Jiang, H.; Bian, X.; Jiang, J.; Chen, Y. Dynamic performance of high-speed railway formation with the rise of water table. Eng. Geol. 2016, 206, 18–32. [Google Scholar] [CrossRef]
- Chen, R.P.; Zhao, X.; Jiang, H.G.; Bian, X.C.; Chen, Y.M. Study on the effect of water level change on the deformation characteristics of ballastless track subgrade. J. China Railw. Soc. 2014, 36, 87–93. (In Chinese) [Google Scholar]
- Chen, S.X.; Song, R.J.; Yu, F.; Li, J. Study on the variation law of rainfall infiltration on the dynamic response of subgrade. J. Rock Mech. Eng. 2017, 36, 4212–4219. (In Chinese) [Google Scholar]
- Biot, M.A. Theory of propagation of elastic waves in a fluid-saturated porous solid. I. Low frequency range. J. Acoust. Soc. Am. 1956, 28, 179–191. [Google Scholar] [CrossRef]
- Takemiya, H.; Bian, X. Substructure Simulation of Inhomogeneous Track and Layered Ground Dynamic Interaction under Train Passage. J. Eng. Mech. 2005, 131, 699–711. [Google Scholar] [CrossRef]
- Hu, J.; Bian, X.-C. Analysis of dynamic stresses in ballasted railway track due to train passages at high speeds. J. Zhejiang Univ. A 2022, 23, 443–457. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Layer | Biot’s Constant α | Biot’s Constant M (MPa) | Young’s Modulus E (MPa) | Poisson’s Ratio v | Density of Soil Particles (kg/m3) | Liquid Density (kg/m3) | Soil Damping D0 | Porosity n | Permeability Coefficient kD (m/s) |
|---|---|---|---|---|---|---|---|---|---|
| Roadbed | 0.001 | 0.001 | 240 | 0.25 | 2500 | 0.001 | 0.05 | 0.001 | 10−20 |
| Subgrade | 0.001 | 0.001 | 140 | 0.3 | 2200 | 0.001 | 0.05 | 0.001 | 10−20 |
| Soil layer 1 | 0.001 | 0.001 | 113 | 0.35 | 2700 | 0.001 | 0.05 | 0.001 | 10−20 |
| Soil layer 2 | 0.001 | 0.001 | 113 | 0.35 | 2700 | 0.001 | 0.05 | 0.001 | 10−20 |
| Soil layer 3 | 0.001 | 0.001 | 135 | 0.35 | 2700 | 0.001 | 0.05 | 0.001 | 10−20 |
| Soil Layer | Biot’s Constant α | Biot’s Constant M (MPa) | Young’s Modulus E (MPa) | Poisson’s Ratio v | Density of Soil Particles (kg/m3) | Liquid Density (kg/m3) | Soil Damping D0 | Porosity n | Permeability Coefficient kD (m/s) |
|---|---|---|---|---|---|---|---|---|---|
| Roadbed | 0.001 | 0.001 | 240 | 0.25 | 2500 | 1000 | 0.05 | 0.001 | 1 |
| Subgrade | 1.000 | 6400 | 80 | 0.3 | 2700 | 1000 | 0.05 | 0.3 | 10−6 |
| Soil layer 1 | 1.000 | 3520 | 45 | 0.35 | 2700 | 1000 | 0.05 | 0.6 | 10−6 |
| Soil layer 2 | 1.000 | 3520 | 45 | 0.35 | 2700 | 1000 | 0.05 | 0.6 | 10−8 |
| Soil layer 3 | 1.000 | 3520 | 60 | 0.35 | 2700 | 1000 | 0.05 | 0.6 | 10−6 |
| Rail Mass per Linear Meter (kg/m) | Rail Bending Stiffness (MNm2) | Slab Bending Stiffness (MNm2) | Mass per Linear Meter of Slab (kg/m) | Stiffness of CA Mortar Layer (MN/m/m) |
|---|---|---|---|---|
| 60.64 | 6.625 | 40 | 950 | 100 |
| Damping of CA mortar layer (Ns/m/m) | Bending stiffness of the concrete base (MNm2) | Mass per linear meter of the concrete base (kg/m) | Fastener stiffness (MN/m/m) | Fastener damping (Ns/m/m) |
| 2 × 105 | 190 | 1800 | 28.5 | 5 × 104 |
| Parameter Name | Value |
|---|---|
| Carriage mass/kg | 45,000 |
| Bogie mass/kg | 3600 |
| Wheelset quality/kg | 1700 |
| Carriage length/m | 24.8 |
| Centre-to-centre distance of adjacent bogies/m | 14.9 |
| Bogie length/m | 2.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Jin, L.; Wu, S.; Zheng, B.; Tang, Y.; Wu, X. Effect of Groundwater Level Rise on the Critical Velocity of High-Speed Railway. Water 2023, 15, 3764. https://doi.org/10.3390/w15213764
Hu J, Jin L, Wu S, Zheng B, Tang Y, Wu X. Effect of Groundwater Level Rise on the Critical Velocity of High-Speed Railway. Water. 2023; 15(21):3764. https://doi.org/10.3390/w15213764
Chicago/Turabian StyleHu, Jing, Linlian Jin, Shujing Wu, Bin Zheng, Yue Tang, and Xuezheng Wu. 2023. "Effect of Groundwater Level Rise on the Critical Velocity of High-Speed Railway" Water 15, no. 21: 3764. https://doi.org/10.3390/w15213764