


Impacts of Spatiotemporal Gaps in Satellite Soil Moisture Data on Hydrological Data Assimilation
Abstract
1. Introduction
2. Materials and Methods
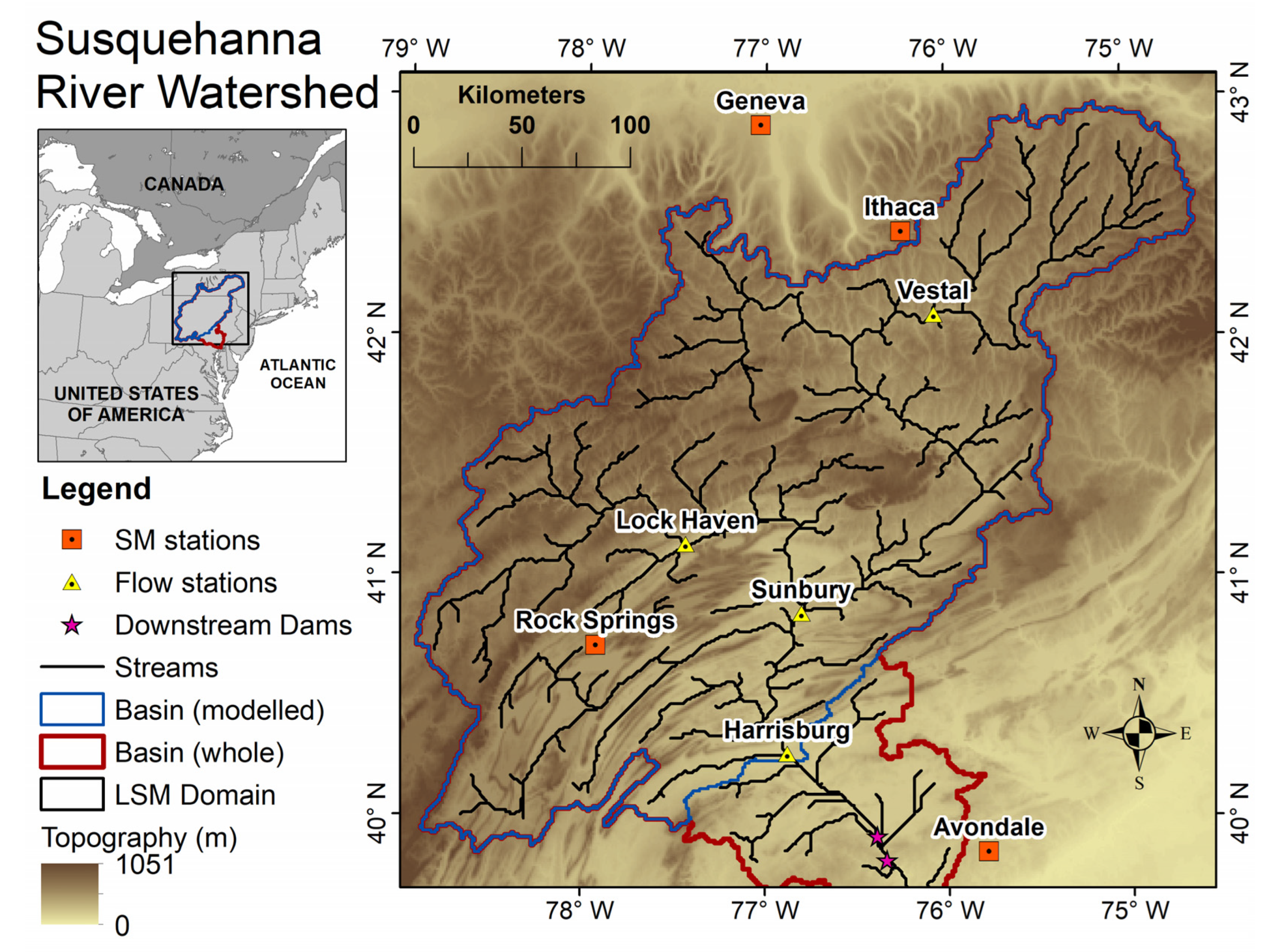
2.1. Study Area
2.2. Hydrological Modeling
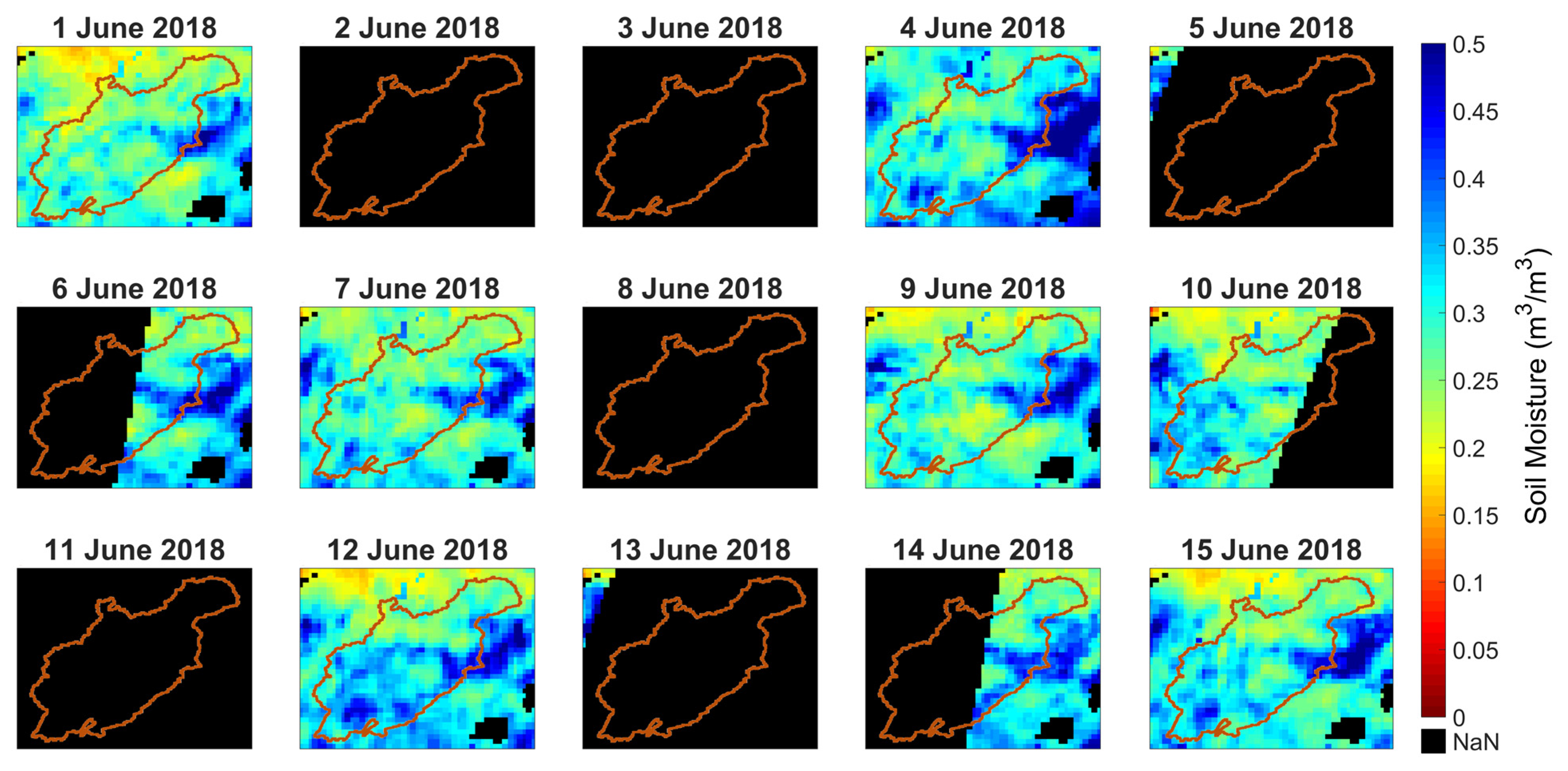
2.3. Remotely Sensed Soil Moisture
2.4. Data Assimilation
2.4.1. Ensemble Kalman Filter (EnKF)
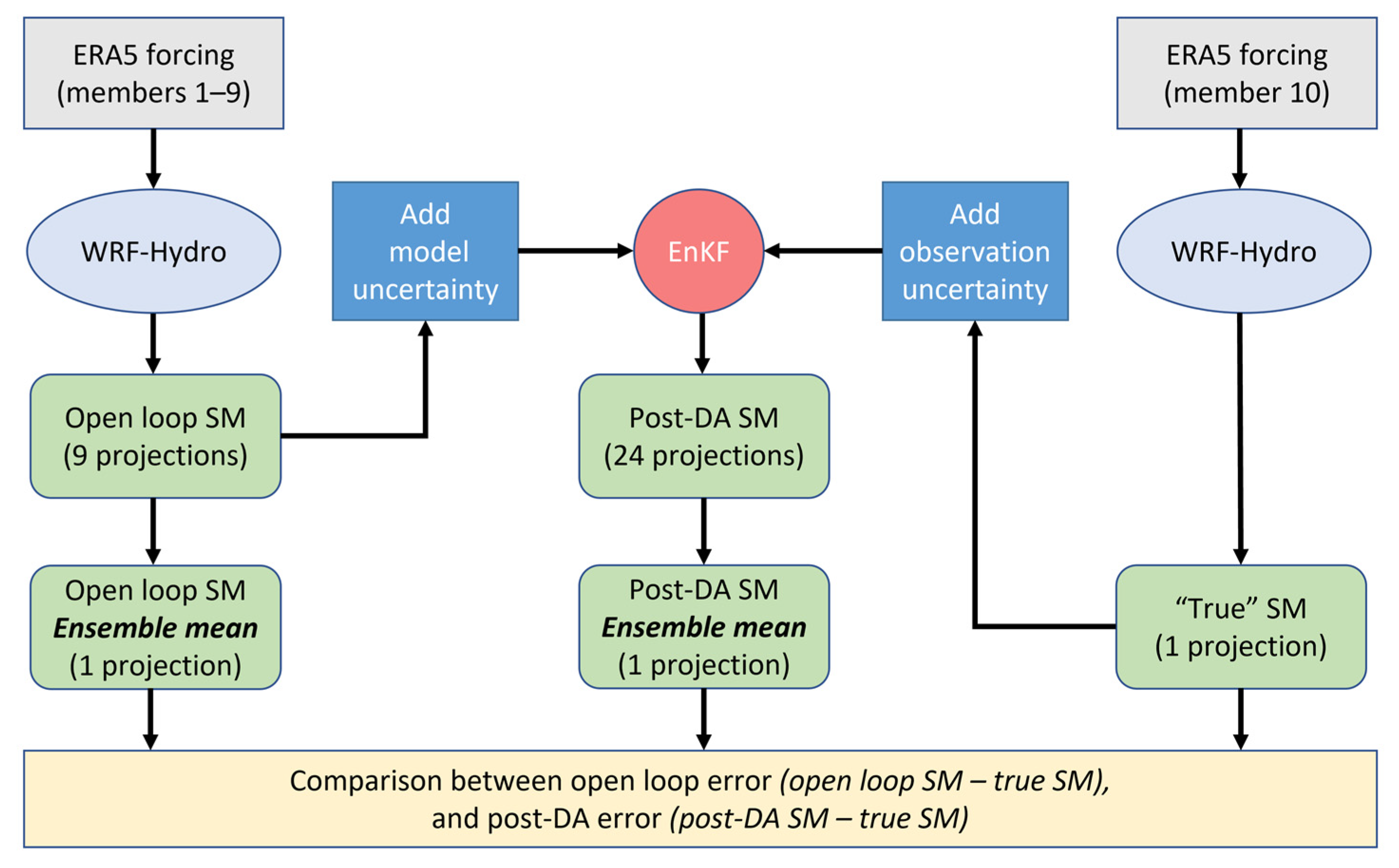
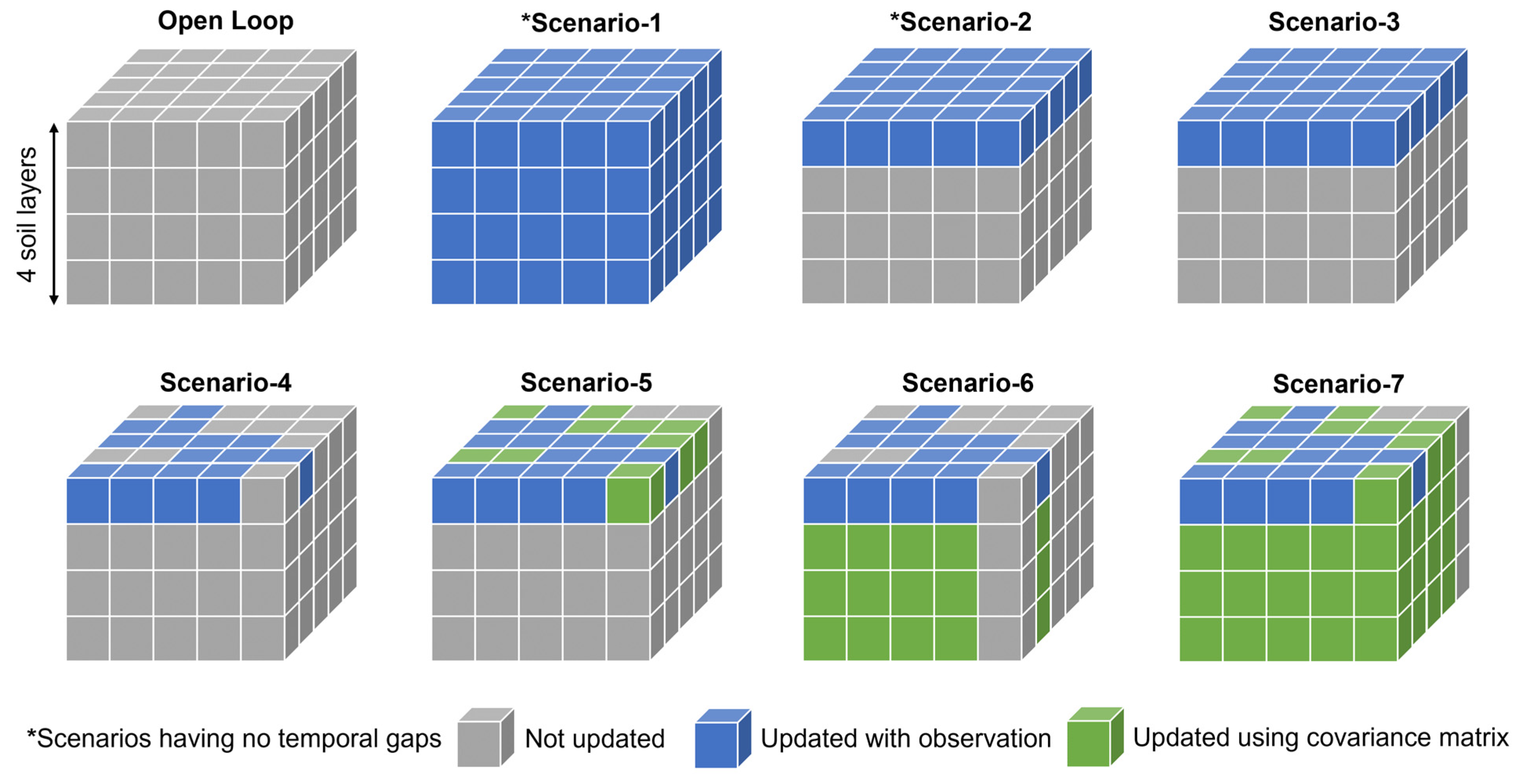
2.4.2. Synthetic Experiments
2.4.3. Real-Data Experiments
3. Results and Discussion
3.1. Model Calibration and Validation
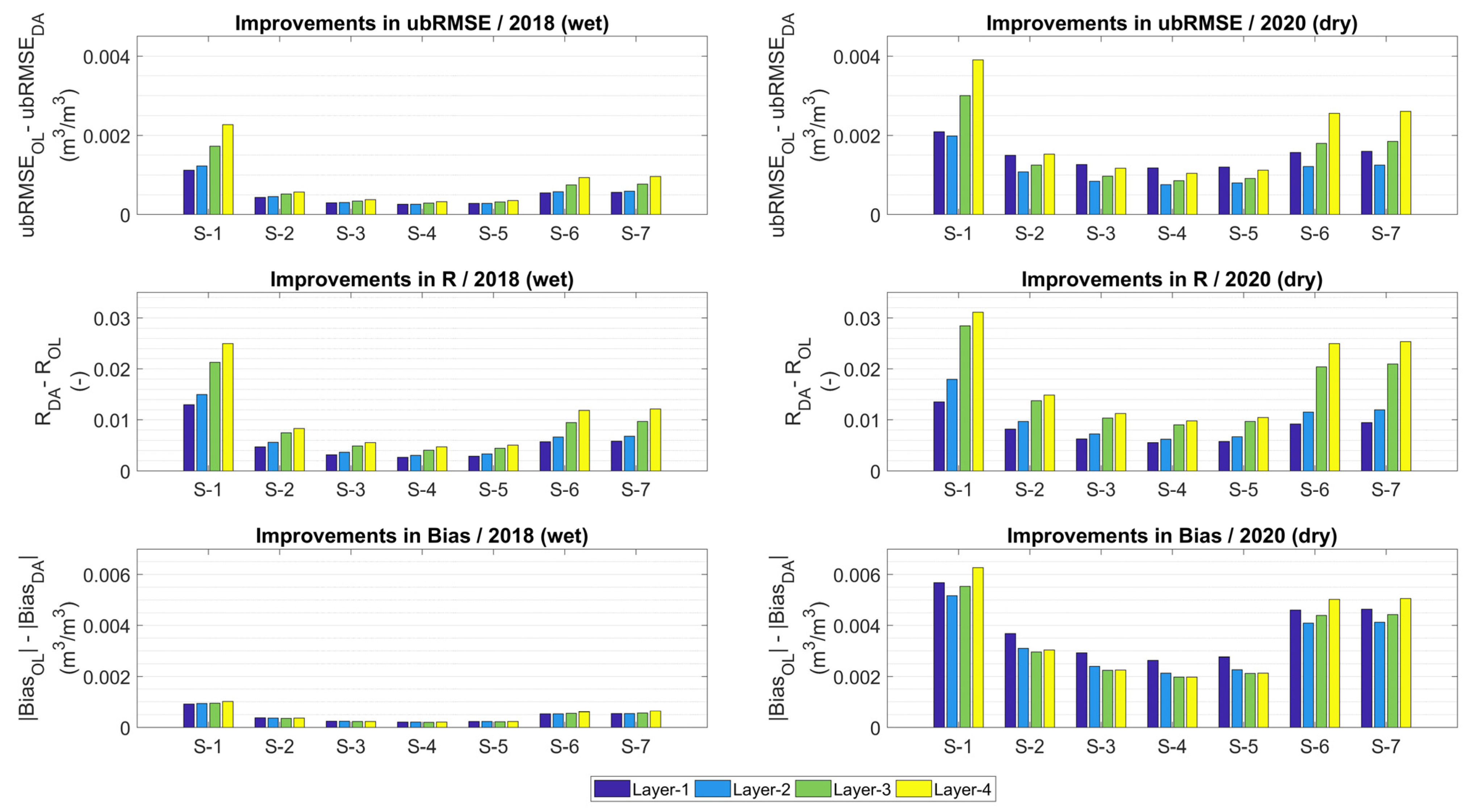
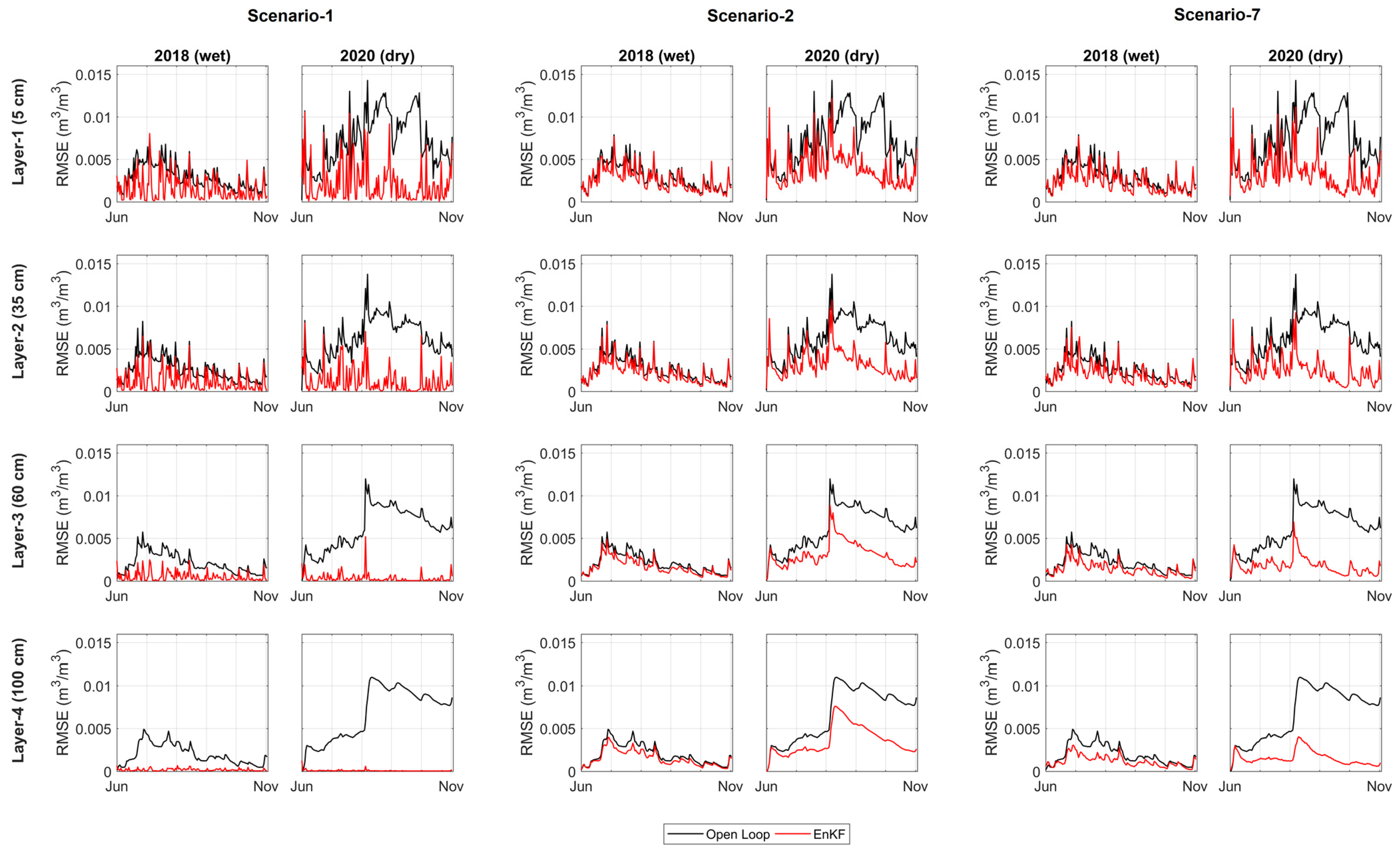
3.2. Synthetic Experiments
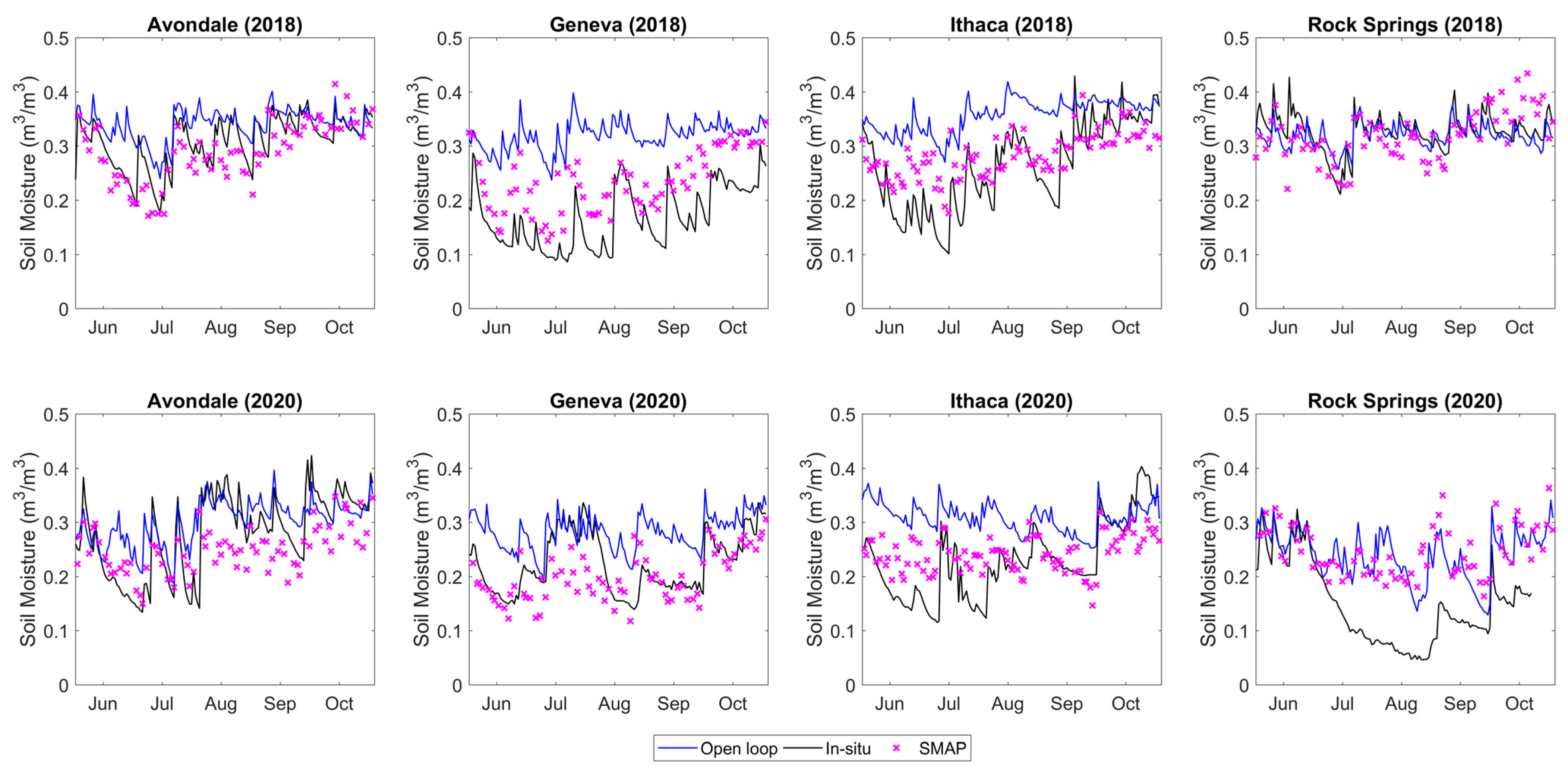
3.3. Real-Data Experiments
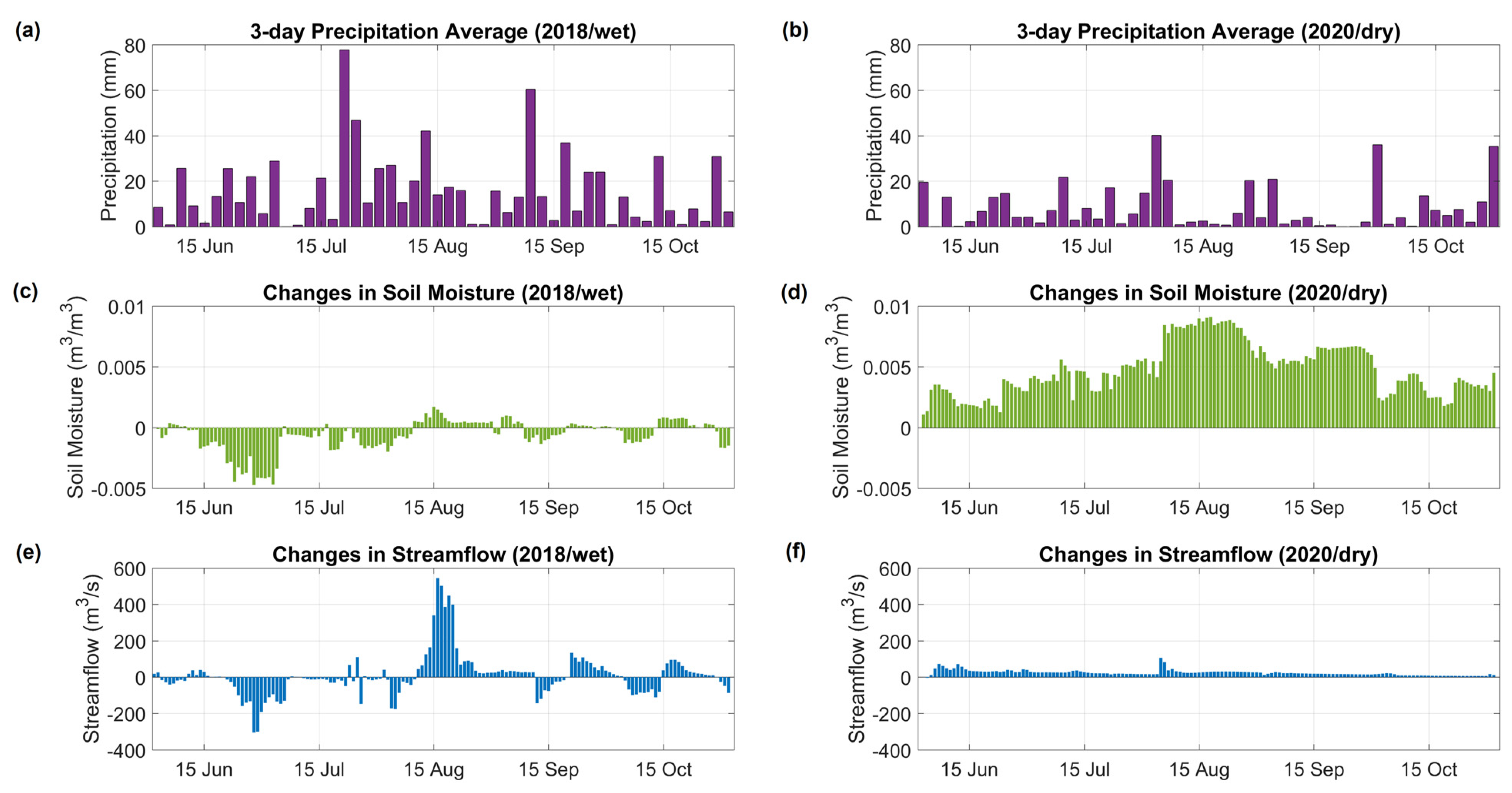
3.4. Streamflow Modeling Performance
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Peng, J.; Albergel, C.; Balenzano, A.; Brocca, L.; Cartus, O.; Cosh, M.H.; Crow, W.T.; Dabrowska-Zielinska, K.; Dadson, S.; Davidson, M.W.; et al. A roadmap for high-resolution satellite soil moisture applications–confronting product characteristics with user requirements. Remote Sens. Environ. 2021, 252, 112162. [Google Scholar] [CrossRef]
- Gruber, A.; De Lannoy, G.; Crow, W. A Monte Carlo based adaptive Kalman filtering framework for soil moisture data assimilation. Remote Sens. Environ. 2019, 228, 105–114. [Google Scholar] [CrossRef]
- Dorigo, W.; Himmelbauer, I.; Aberer, D.; Schremmer, L.; Petrakovic, I.; Zappa, L.; Preimesberger, W.; Xaver, A.; Annor, F.; Ardö, J.; et al. The International Soil Moisture Network: Serving Earth system science for over a decade. Hydrol. Earth Syst. Sci. 2021, 25, 5749–5804. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.-J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Babaeian, E.; Sadeghi, M.; Jones, S.B.; Montzka, C.; Vereecken, H.; Tuller, M. Ground, proximal, and satellite remote sensing of soil moisture. Rev. Geophys. 2019, 57, 530–616. [Google Scholar] [CrossRef]
- Park, J.; Bindlish, R.; Bringer, A.; Horton, D.; Johnson, J.T. Soil moisture retrieval using a time-series ratio algorithm for the NISAR mission. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 11–16 July 2021. [Google Scholar] [CrossRef]
- Massari, C.; Brocca, L.; Tarpanelli, A.; Moramarco, T. Data assimilation of satellite soil moisture into rainfall-runoff modelling: A complex recipe? Remote Sens. 2015, 7, 11403–11433. [Google Scholar] [CrossRef]
- Kolassa, J.; Reichle, R.H.; Draper, C.S. Merging active and passive microwave observations in soil moisture data assimilation. Remote Sens. Environ. 2017, 191, 117–130. [Google Scholar] [CrossRef]
- Lievens, H.; Reichle, R.H.; Liu, Q.; De Lannoy, G.J.M.; Dunbar, R.S.; Kim, S.B.; Das, N.N.; Cosh, M.; Walker, J.P.; Wagner, W. Joint Sentinel-1 and SMAP data assimilation to improve soil moisture estimates. Geophys. Res. Lett. 2017, 44, 6145–6153. [Google Scholar] [CrossRef] [PubMed]
- Dumedah, G.; Walker, J.P.; Merlin, O. Root-zone soil moisture estimation from assimilation of downscaled Soil Moisture and Ocean Salinity data. Adv. Water Resour. 2015, 84, 14–22. [Google Scholar] [CrossRef]
- Draper, C.S.; Reichle, R.H.; De Lannoy, G.J.M.; Liu, Q. Assimilation of passive and active microwave soil moisture retrievals. Geophys. Res. Lett. 2012, 39, L04401. [Google Scholar] [CrossRef]
- Blyverket, J.; Hamer, P.D.; Bertino, L.; Albergel, C.; Fairbairn, D.; Lahoz, W.A. An Evaluation of the EnKF vs. EnOI and the Assimilation of SMAP, SMOS and ESA CCI Soil Moisture Data over the Contiguous US. Remote Sens. 2019, 11, 478. [Google Scholar] [CrossRef]
- Kumar, S.V.; Reichle, R.H.; Harrison, K.W.; Peters-Lidard, C.D.; Yatheendradas, S.; Santanello, J.A. A comparison of methods for a priori bias correction in soil moisture data assimilation. Water Resour. Res. 2012, 48, W03515. [Google Scholar] [CrossRef]
- Karthikeyan, L.; Pan, M.; Wanders, N.; Kumar, D.N.; Wood, E.F. Four decades of microwave satellite soil moisture observations: Part 1. A review of retrieval algorithms. Adv. Water Resour. 2017, 109, 106–120. [Google Scholar] [CrossRef]
- Han, X.; Li, X.; Hendricks Franssen, H.J.; Vereecken, H.; Montzka, C. Spatial horizontal correlation characteristics in the land data assimilation of soil moisture. Hydrol. Earth Syst. Sci. 2012, 16, 1349–1363. [Google Scholar] [CrossRef]
- Yan, H.; Moradkhani, H. Combined assimilation of streamflow and satellite soil moisture with the particle filter and geostatistical modelling. Adv. Water Resour. 2016, 94, 364–378. [Google Scholar] [CrossRef]
- Sahoo, A.K.; De Lannoy, G.J.; Reichle, R.H.; Houser, P.R. Assimilation and downscaling of satellite observed soil moisture over the Little River Experimental Watershed in Georgia, USA. Adv. Water Resour. 2013, 52, 19–33. [Google Scholar] [CrossRef]
- Evensen, G. The ensemble Kalman filter: Theoretical formulation and practical implementation. Ocean Dyn. 2016, 53, 343–367. [Google Scholar] [CrossRef]
- Rouf, T.; Girotto, M.; Houser, P.; Maggioni, V. Assimilating satellite-based soil moisture observations in a land surface model: The effect of spatial resolution. J. Hydrol. X 2021, 13, 100105. [Google Scholar] [CrossRef]
- Baguis, P.; Roulin, E. Soil moisture data assimilation in a hydrological model: A case study in Belgium using large-scale satellite data. Remote Sens. 2017, 9, 820. [Google Scholar] [CrossRef]
- López López, P.; Wanders, N.; Schellekens, J.; Renzullo, L.J.; Sutanudjaja, E.H.; Bierkens, M.F. Improved large-scale hydrological modelling through the assimilation of streamflow and downscaled satellite soil moisture observations. Hydrol. Earth Syst. Sci. 2016, 20, 3059–3076. [Google Scholar] [CrossRef]
- De Santis, D.; Biondi, D.; Crow, W.T.; Camici, S.; Modanesi, S.; Brocca, L.; Massari, C. Assimilation of satellite soil moisture products for river flow prediction: An extensive experiment in over 700 catchments throughout Europe. Water Resour. Res. 2021, 57, e2021WR029643. [Google Scholar] [CrossRef]
- Massari, C.; Camici, S.; Ciabatta, L.; Brocca, L. Exploiting satellite-based surface soil moisture for flood forecasting in the Mediterranean area: State update versus rainfall correction. Remote Sens. 2018, 10, 292. [Google Scholar] [CrossRef]
- Leroux, D.J.; Pellarin, T.; Vischel, T.; Cohard, J.-M.; Gascon, T.; Gibon, F.; Mialon, A.; Galle, S.; Peugeot, C.; Seguis, L. Assimilation of SMOS soil moisture into a distributed hydrological model and impacts on the water cycle variables over the Ouémé catchment in Benin. Hydrol. Earth Syst. Sci. 2016, 20, 2827–2840. [Google Scholar] [CrossRef]
- Patil, A.; Ramsankaran, R.A.A.J. Improved streamflow simulations by coupling soil moisture analytical relationship in EnKF based hydrological data assimilation framework. Adv. Water Resour. 2018, 121, 173–188. [Google Scholar] [CrossRef]
- Cenci, L.; Pulvirenti, L.; Boni, G.; Chini, M.; Matgen, P.; Gabellani, S.; Squicciarino, G.; Pierdicca, N. An evaluation of the potential of Sentinel 1 for improving flash flood predictions via soil moisture–data assimilation. Adv. Geosci. 2017, 44, 89–100. [Google Scholar] [CrossRef]
- Ciupak, M.; Ozga-Zielinski, B.; Adamowski, J.; Deo, R.C.; Kochanek, K. Correcting satellite precipitation data and assimilating satellite-derived soil moisture data to generate ensemble hydrological forecasts within the HBV rainfall-runoff model. Water 2019, 11, 2138. [Google Scholar] [CrossRef]
- Patil, A.; Ramsankaran, R.A.A.J. Improving streamflow simulations and forecasting performance of SWAT model by assimilating remotely sensed soil moisture observations. J. Hydrol. 2017, 555, 683–696. [Google Scholar] [CrossRef]
- Meng, S.; Xie, X.; Liang, S. Assimilation of soil moisture and streamflow observations to improve flood forecasting with considering runoff routing lags. J. Hydrol. 2017, 550, 568–579. [Google Scholar] [CrossRef]
- Tian, S.; Renzullo, L.J.; Pipunic, R.C.; Lerat, J.; Sharples, W.; Donnelly, C. Satellite soil moisture data assimilation for improved operational continental water balance prediction. Hydrol. Earth Syst. Sci. 2021, 25, 4567–4584. [Google Scholar] [CrossRef]
- Mao, Y.; Crow, W.T.; Nijssen, B. A framework for diagnosing factors degrading the streamflow performance of a soil moisture data assimilation system. J. Hydrometeorol. 2018, 20, 79–97. [Google Scholar] [CrossRef]
- Fairbairn, D.; Barbu, A.L.; Napoly, A.; Albergel, C.; Mahfouf, J.F.; Calvet, J.C. The effect of satellite-derived surface soil moisture and leaf area index land data assimilation on streamflow simulations over France. Hydrol. Earth Syst. Sci. 2017, 21, 2015–2033. [Google Scholar] [CrossRef]
- De Lannoy, G.J.; Reichle, R.H. Assimilation of SMOS brightness temperatures or soil moisture retrievals into a land surface model. Hydrol. Earth Syst. Sci. 2016, 20, 4895–4911. [Google Scholar] [CrossRef]
- Ridler, M.E.; Madsen, H.; Stisen, S.; Bircher, S.; Fensholt, R. Assimilation of SMOS-derived soil moisture in a fully integrated hydrological and soil-vegetation-atmosphere transfer model in Western Denmark. Water Resour. Res. 2014, 50, 8962–8981. [Google Scholar] [CrossRef]
- Jackson, J.K.; Huryn, A.D.; Strayer, D.L.; Courtemanch, D.L.; Sweeney, B.W. Atlantic Coast Rivers of the Southeastern United States. In Rivers of North America, 1st ed.; Benke, A.C., Cushing, C.E., Eds.; Elsevier Academic Press: Cambridge, MA, USA, 2005; pp. 20–71. [Google Scholar]
- Ray, R.L.; Beighley, R.E.; Yoon, Y. Integrating runoff generation and flow routing in Susquehanna River Basin to characterize key hydrologic processes contributing to maximum annual flood events. J. Hydrol. Eng. 2016, 21, 04016026. [Google Scholar] [CrossRef]
- DePhilip, M.; Moberg, T. Ecosystem Flow Recommendations for the Susquehanna River Basin; The Nature Conservancy: Harrisburg, PA, USA, 2010. [Google Scholar]
- Schaefer, G.L.; Cosh, M.H.; Jackson, T.J. The USDA natural resources conservation service soil climate analysis network (SCAN). J. Atmos. Oceanic Technol. 2007, 24, 2073–2077. [Google Scholar] [CrossRef]
- Bell, J.E.; Palecki, M.A.; Baker, C.B.; Collins, W.G.; Lawrimore, J.H.; Leeper, R.; Hall, M.E.; Kochendorfer, J.; Meyers, T.P.; Wilson, T.; et al. US Climate Reference Network soil moisture and temperature observations. J. Hydrometeorol. 2013, 14, 977–988. [Google Scholar] [CrossRef]
- Gochis, D.J.; Barlage, M.; Cabell, R.; Casali, M.; Dugger, A.; FitzGerald, K.; McAllister, J.; McCreight, A.; RafieeiNasab, L.; Read, K.; et al. The WRF-Hydro Modeling System Technical Description, Version (5.1.1); NCAR Technical Note; UCAR: Boulder, CO, USA, 2020. [Google Scholar]
- Niu, G.-Y.; Yang, Z.-L.; Mitchell, K.E.; Chen, F.; Ek, M.B.; Barlage, M.; Kumar, A.; Manning, K.; Niyogi, D.; Rosero, E.; et al. The community Noah land surface model with multiparameterization options (Noah-MP): 1. Model description and evaluation with local-scale measurements. J. Geophys. Res. Atmos. 2011, 116, D12109. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Liu, Z.; Berner, J.; Wang, W.; Powers, J.G.; Duda, M.G.; Barker, D.M.; et al. A Description of the Advanced Research WRF Version 4; NCAR Technical Note; UCAR: Boulder, CO, USA, 2019. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horanyi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorolog. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Asadzadeh, M.; Tolson, B. Pareto archived dynamically dimensioned search with hypervolume-based selection for multi-objective optimization. Eng. Optim. 2013, 45, 1489–1509. [Google Scholar] [CrossRef]
- Tolson, B.A.; Shoemaker, C.A. Dynamically dimensioned search algorithm for computationally efficient watershed model calibration. Water Resour. Res. 2007, 43, W01413. [Google Scholar] [CrossRef]
- Loizu, J.; Massari, C.; Alvarez-Mozos, J.; Tarpanelli, A.; Brocca, L.; Casali, J. On the assimilation set-up of ASCAT soil moisture data for improving streamflow catchment simulation. Adv. Water Resour. 2018, 111, 86–104. [Google Scholar] [CrossRef]
- Sun, L.; Seidou, O.; Nistor, I.; Liu, K. Review of the Kalman-type hydrological data assimilation. Hydrol. Sci. J. 2015, 61, 2348–2366. [Google Scholar] [CrossRef]
- Montzka, C.; Pauwels, V.R.N.; Franssen, H.H.; Han, X.; Vereecken, H. Multivariate and multiscale data assimilation in terrestrial systems: A review. Sensors 2012, 12, 16291–16333. [Google Scholar] [CrossRef]
- Wanders, N.; Karssenberg, D.; De Roo, A.; De Jong, S.M.; Bierkens, M.F.P. The suitability of remotely sensed soil moisture for improving operational flood forecasting. Hydrol. Earth Syst. Sci. 2014, 18, 2343–2357. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D. Assessing the impact of horizontal error correlations in background fields on soil moisture estimation. J. Hydrometeorol. 2003, 4, 1229–1242. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D. Bias reduction in short records of satellite soil moisture. Geophys. Res. Lett. 2004, 31, L19501. [Google Scholar] [CrossRef]
- Renzullo, L.J.; Van Dijk, A.I.J.M.; Perraud, J.M.; Collins, D.; Henderson, B.; Jin, H.; Smith, A.; McJannet, D.L. Continental satellite soil moisture data assimilation improves root-zone moisture analysis for water resources assessment. J. Hydrol. 2014, 519, 2747–2762. [Google Scholar] [CrossRef]
- Kumar, S.V.; Reichle, R.H.; Koster, R.D.; Crow, W.T.; Peters-Lidard, C.D. Role of subsurface physics in the assimilation of surface soil moisture observations. J. Hydrometeorol. 2009, 10, 1534–1547. [Google Scholar] [CrossRef]
- Yilmaz, M.T.; Crow, W.T. The optimality of potential rescaling approaches in land data assimilation. J. Hydrometeorol. 2013, 14, 650–660. [Google Scholar] [CrossRef]
- Lievens, H.; Tomer, S.; Al Bitar, A.; De Lannoy, G.; Drusch, M.; Dumedah, G.; Franssen, H.-J.H.; Kerr, Y.; Martens, B.; Pan, M.; et al. SMOS soil moisture assimilation for improved hydrologic simulation in the Murray Darling Basin, Australia. Remote Sens. Environ. 2015, 168, 146–162. [Google Scholar] [CrossRef]
- Samuel, J.; Coulibaly, P.; Dumedah, G.; Moradkhani, H. Assessing model state and forecasts variation in hydrologic data assimilation. J. Hydrol. 2014, 513, 127–141. [Google Scholar] [CrossRef]
- Trudel, M.; Leconte, R.; Paniconi, C. Analysis of the hydrological response of a distributed physically-based model using post-assimilation (EnKF) diagnostics of streamflow and in situ soil moisture observations. J. Hydrol. 2014, 514, 192–201. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Layer | Calibration (2011/Wet Year) | Validation (2018/Wet Year) | Validation (2020/Dry Year) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Soil Moisture | Flow | Soil Moisture | Flow | Soil Moisture | Flow | |||||||
| R | ubRMSE (m3/m3) | Bias (m3/m3) | NSE | R | ubRMSE (m3/m3) | Bias (m3/m3) | NSE | R | ubRMSE (m3/m3) | Bias (m3/m3) | NSE | |
| Layer 1 | 0.81 | 0.056 | 0.092 | 0.78 | 0.68 | 0.041 | 0.071 | 0.77 | 0.57 | 0.053 | 0.062 | 0.71 |
| Layer 2 | 0.84 | 0.048 | 0.103 | 0.68 | 0.037 | 0.064 | 0.75 | 0.042 | 0.079 | |||
| Layer 3 | 0.75 | 0.026 | 0.062 | 0.63 | 0.027 | 0.054 | 0.64 | 0.021 | 0.044 | |||
| Performance Metrics | Layer 1 | Layer 2 | Layer 3 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2018 (Wet) | 2020 (Dry) | 2018 (Wet) | 2020 (Dry) | 2018 (Wet) | 2020 (Dry) | |||||||||
| OL | RS | DA | OL | RS | DA | OL | DA | OL | DA | OL | DA | OL | DA | |
| ubRMSE (m3/m3) | 0.041 | 0.040 | 0.040 | 0.053 | 0.052 | 0.051 | 0.037 | 0.036 | 0.042 | 0.041 | 0.027 | 0.028 | 0.021 | 0.022 |
| R | 0.68 | 0.73 | 0.72 | 0.57 | 0.61 | 0.66 | 0.68 | 0.71 | 0.75 | 0.78 | 0.63 | 0.64 | 0.64 | 0.60 |
| Bias (m3/m3) | 0.071 | 0.026 | 0.071 | 0.062 | 0.039 | 0.062 | 0.064 | 0.064 | 0.079 | 0.079 | 0.054 | 0.054 | 0.044 | 0.044 |
| Measurement Location | Layer 1 | Layer 2 | Layer 3 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2018 (Wet) | 2020 (Dry) | 2018 (Wet) | 2020 (Dry) | 2018 (Wet) | 2020 (Dry) | |||||||||
| OL | RS | DA | OL | RS | DA | OL | DA | OL | DA | OL | DA | OL | DA | |
| Avondale | 0.77 | 0.82 | 0.81 | 0.76 | 0.70 | 0.75 | 0.73 | 0.76 | 0.76 | 0.71 | 0.33 | 0.24 | 0.84 | 0.86 |
| Geneva | 0.50 | 0.78 | 0.54 | 0.67 | 0.61 | 0.70 | 0.47 | 0.52 | 0.71 | 0.74 | 0.47 | 0.57 | 0.16 | 0.27 |
| Ithaca | 0.79 | 0.80 | 0.84 | 0.25 | 0.57 | 0.54 | 0.85 | 0.88 | 0.73 | 0.86 | 0.85 | 0.88 | 0.69 | 0.69 |
| Rock Springs | 0.68 | 0.53 | 0.68 | 0.62 | 0.56 | 0.66 | 0.68 | 0.70 | 0.80 | 0.82 | 0.87 | 0.85 | 0.85 | 0.58 |
| Scenario | 2018 (Wet) | 2020 (Dry) | ||
|---|---|---|---|---|
| NSE | log-NSE | NSE | log-NSE | |
| Open Loop | 0.77 | 0.82 | 0.71 | 0.61 |
| Scenario 7 | 0.77 | 0.84 | 0.70 | 0.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammed, K.; Leconte, R.; Trudel, M. Impacts of Spatiotemporal Gaps in Satellite Soil Moisture Data on Hydrological Data Assimilation. Water 2023, 15, 321. https://doi.org/10.3390/w15020321
Mohammed K, Leconte R, Trudel M. Impacts of Spatiotemporal Gaps in Satellite Soil Moisture Data on Hydrological Data Assimilation. Water. 2023; 15(2):321. https://doi.org/10.3390/w15020321
Chicago/Turabian StyleMohammed, Khaled, Robert Leconte, and Mélanie Trudel. 2023. "Impacts of Spatiotemporal Gaps in Satellite Soil Moisture Data on Hydrological Data Assimilation" Water 15, no. 2: 321. https://doi.org/10.3390/w15020321
APA StyleMohammed, K., Leconte, R., & Trudel, M. (2023). Impacts of Spatiotemporal Gaps in Satellite Soil Moisture Data on Hydrological Data Assimilation. Water, 15(2), 321. https://doi.org/10.3390/w15020321