1. Introduction
Over the past few decades, the action of water waves on nearshore structures has been one of the most interesting and important topics investigated by researchers and engineers to obtain the wave elevations and applied forces needed for coastal protection-related projects. A partially immersed breakwater, in general, can be placed as an economic and effective protective structure to reduce the direct action of an incoming wave and at the same time to maintain the needed environmental conditions for water behind the body through the induced fluid motion across the region beneath the body.
Early studies on waves acting on a partially immersed or fixed floating body focused mostly on the use of a linear wave as an incident wave condition. Mei and Black [
1] introduced a variational-formulation-based numerical approach to calculate the scattering properties of a linear wave for bottom and surface obstacles of various proportions, including surface docks. Later, the scattering of a regular wave by a fixed and partially immersed circular cylinder was investigated by Martin and Dixon [
2]. Also limited to the linear wave condition, McCartney [
3] examined the advantages and disadvantages of the box and pontoon type of breakwaters using the hydraulic model test results. Based on the assumption of a small gap condition, Drimer et al. [
4] derived a simplified analytical model to study the effectiveness of a partially submerged long rectangular breakwater in reducing the transmitted waves. Solving the symmetric and antisymmetric parts of the velocity potentials analytically, Kanoria et al. [
5] analyzed the behavior of the reflection coefficient for a linear wave encountering four types of fixed obstacles in the form of a thick rectangular cross-section that was placed in different vertical positions, including a partially immersed one. Considering two porous walls attached to a partially submerged box type breakwater, Qiao et al. [
6] analytically and experimentally investigated the performance of the breakwater in reducing the reflected and transmitted linear waves under various structural and porous wall conditions. Recently, an analytical approach was carried out by Kaligatla [
7] to study the oblique scattering of a linear water wave by a partially immersed rectangular breakwater.
The above-mentioned studies on linear waves acting on a fixed and partially immersed body may not represent well the wave conditions in coastal areas of shallow water depth, especially when the wave height becomes relatively large. Therefore, it is desirable to extend the linear wave study to cases with the inclusion of wave nonlinearity in shallow-water depth by modeling the wave propagation, wave transformation, and induced wave forces on bodies. Solitary and cnoidal waves are two typical nonlinear water waves that propagate in a domain of shallow-water depth, or the so-called Boussinesq-type waves. Because of its simple bell-shaped-like wave form, the wave scattering between a solitary wave and various structures of interest were investigated more often than those using a cnoidal wave with periodic oscillations as an incident wave condition. Adopting a linearized wave diffraction theory and a Fourier transformation technique, Isaacson [
8] derived an approximated analytical solution to calculate the applied wave forces for a solitary wave encountering a bottom-mounted and surface-piercing circular cylinder. For a similar structural condition, Wang et al. [
9] and Zhong and Wang [
10] numerically solved the full nonlinear Boussinesq equations to model the scattering process of a solitary wave acting on a fixed vertical cylinder or a cylinder group. In terms of the cases for a solitary wave propagating past a partially submerged body, the wave reflection and transmission processes were investigated by Lu and Wang [
11], Xu et al. [
12]; and Chang et al., [
13] for a box-type structure and by Chen and Wang [
14] for a circular cylinder.
A cnoidal wave with its periodic oscillatory feature is probably better represented when considering waves propagating in a shallow-water coastal environment. Therefore, as modeling studies on cnoidal waves have been very limited, there is a need to expand the approaches to solve the problems related to cnoidal waves encountering a coastal structure. The studies of scattering of cnoidal waves by either a single or multiple bottom-mounted and surface-piercing cylinders include the early theoretical or modeling efforts carried out by Isaacson [
15] and Wang and Ren [
16], and more recently by Weng et al. [
17] and Zhang and Teng [
18]. Tang and Lee [
19] investigated the generation of cnoidal waves and their induced oscillatory boundary-layer flow over a wavy bottom. Ren and Ma [
20] numerically simulated the scattered wave patterns for cnoidal waves encountering a structured system of multiple perforated quasi-ellipse caissons by solving the Navier-Stokes equations with the finite-difference method and the volume-of-fluid technique to capture the free-surface elevations.
Overall, the problems related to a nonlinear shallow water wave acting on a bottom-mounted and surface-piercing obstacle have been investigated more often than in cases with a truncated (or partially immersed) structure. The no-flow boundary condition for a body extended from bottom to above the fluid surface can be applied uniformly to the entire structural boundary that is in contact with the fluids. However, for a partially immersed body, a special solution procedure needs to be developed to handle the mixed boundary conditions that are applied separately on the structural surface and the interfacial open boundaries connecting the inner and outer regions. Additionally, because of the periodic feature, based on modeling efforts, it is generally harder to use a cnoidal wave than a solitary wave to enter such an incident wave into the computational domain and to propagate the scattered and main waves out of the upstream and downstream open boundaries. The other numerical challenge that requires special attention is to model the standing waves or the resonant phenomenon when generated from a periodic flow passing through a confined lateral fluid domain either for a potential flow or a viscous flow condition [
21,
22,
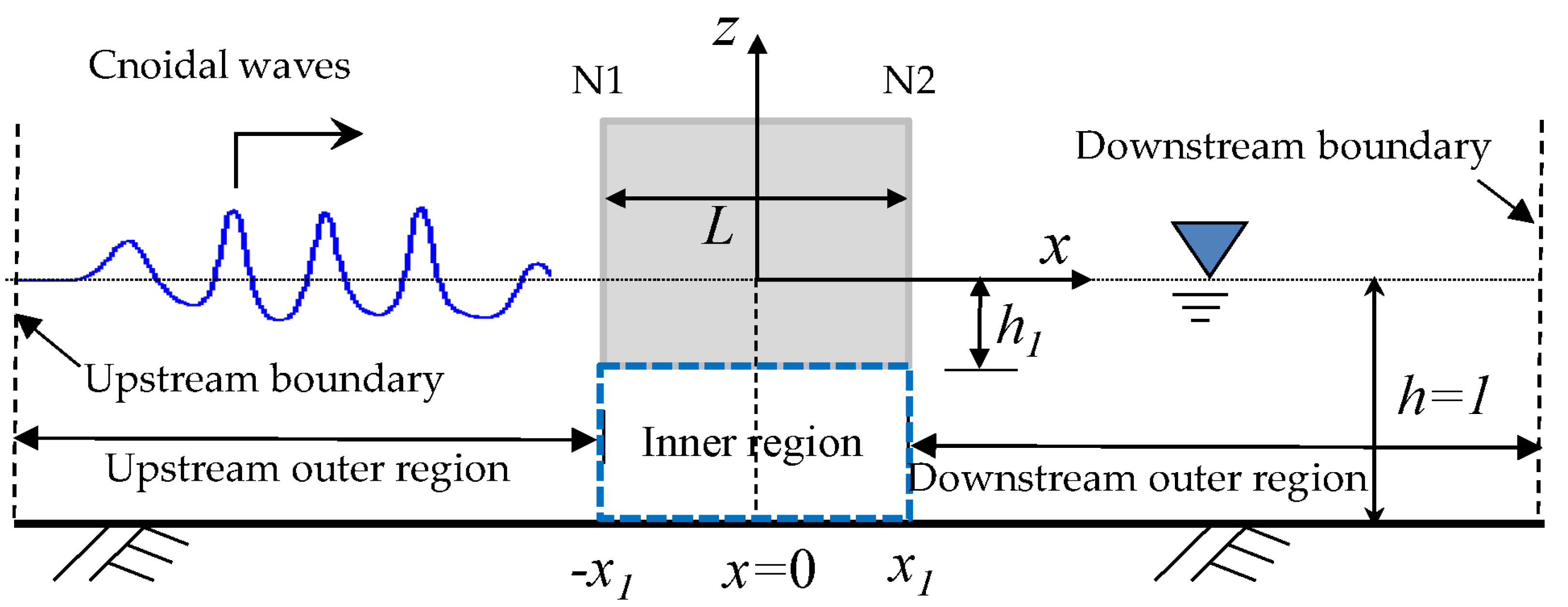
23]. In this study, the wave scattering process after a cnoidal wave has been propagated through the underneath open region does not include the phenomena of standing wave and wave resonance. Due to the lack of studies on a partially immersed body under a cnoidal wave condition, it is important to provide a new modeling approach to predict the wave variations and applied forces for a cnoidal wave encountering a structure that is partially submerged in water. In this study, we intend to develop an efficient and reliable model with a combined analytical and numerical (CAN) approach to investigate the propagation of a cnoidal wave and its subsequent scattering process after encountering a fixed but partially immersed 2D body of rectangular prism. For model verification, experimental measurements were also carried out to record the wave elevations at two locations upstream and downstream of the body. With both sidewalls of a rectangular structure extended vertically upward to a level, which is much higher than the encountering wave elevation, the effect of wave overtopping is not considered in the present study.
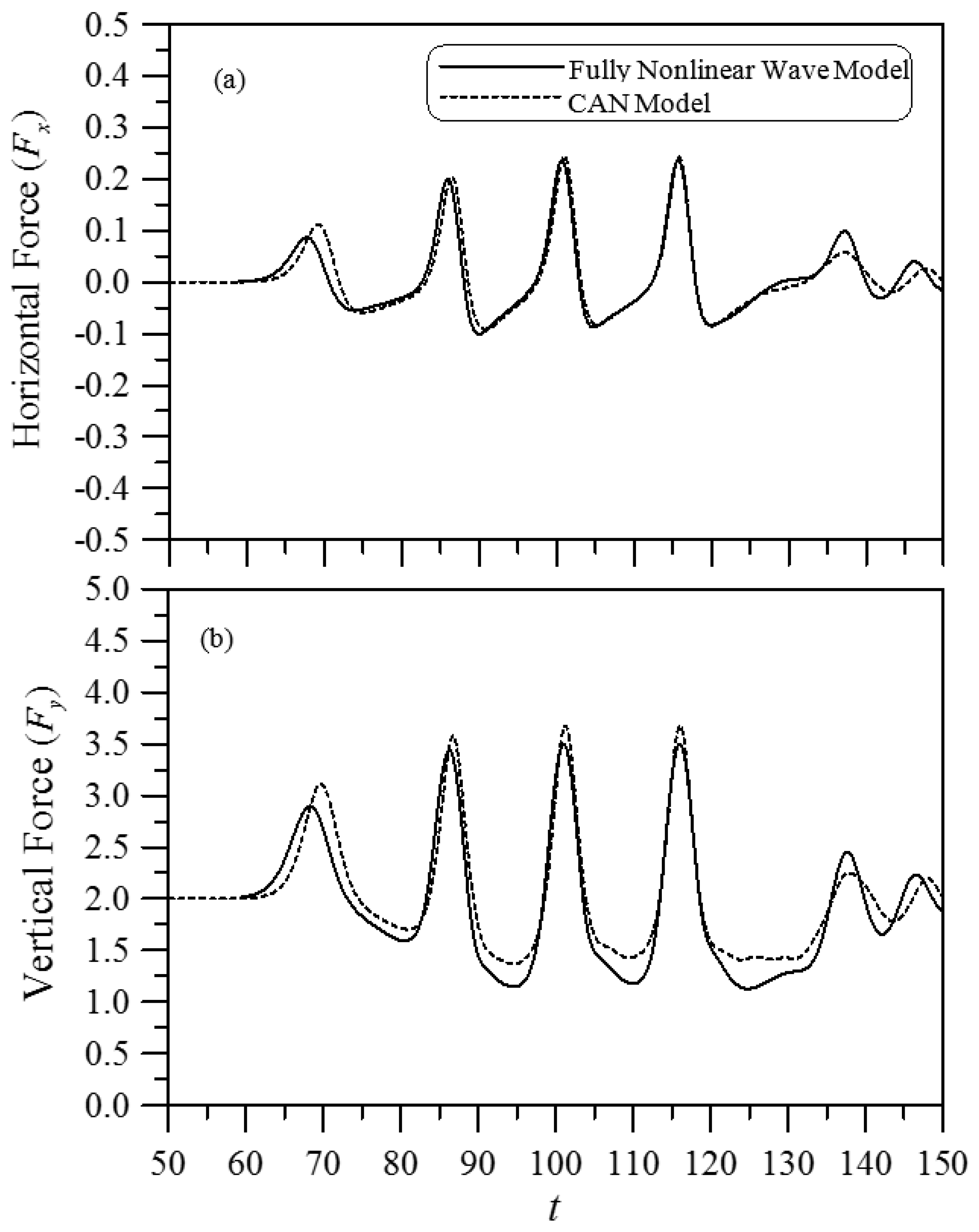
As a part of the integrated approach, a set of Boussinesq equations are solved in the outer region using the finite-difference method to obtain the wave field outside of the body. The solutions for fluid flows in the region beneath the partially immersed body are determined analytically by solving the equations formulated from the orthogonality of eigenfunctions and the mixed matching conditions formed at the domain interfaces. In addition to the determination of the free-surface elevations in terms of the reflected and transmitted waves, the hydrodynamic forces on the solid surface of the truncated structure are calculated. The measurements of incident, reflected, and transmitted wave profiles under different waves and structural conditions are used to verify the model predictions. The CAN model results match closely with the measured data. The CAN model calculated horizontal and vertical forces on the body that were then compared with the results obtained from a potential-flow-based fully nonlinear wave model (FNWM). The agreeable force comparisons from the two models are considered to effectively verify the feasibility and applicability of the CAN model. The parametric studies by examining the effects of body thickness and immersed depth (draft) on the reflected and transmitted waves are also presented.
The fully nonlinear wave model (FNWM)—adopted to make comparisons with the CAN model results—was developed by Chang et al. [
13]. This numerical model solved the Laplace equation of the velocity potential describing the vertical 2D flow field together with the fully nonlinear kinematic and dynamic free-surface boundary conditions in a transient boundary-fitted grid system. The grids generated follow the transient curvilinear coordinate system, which transforms the time-dependent physical domain in (
x,
y;
t) to a computational domain in (
,
;
). The spatial discretization of the governing differential equation in the model was based on the up to second-order accuracy finite difference scheme and the time derivative is approximated with a forward difference. More detailed theoretical and numerical formulations, computational procedures, and verification of the FNWM can be found in Chang et al. [
13].
The aim of the present study is to advance the knowledge on the development of a combined analytical and numerical (CAN) approach to improve the computational efficiency and stability for predicting the scattering process of an incident nonlinear shallow-water wave, such as the cnoidal wave, encountering a partially immersed box-type body. The main advantage of the CAN model when compared to the fully nonlinear wave model (FNWM) is its computational efficiency. Even for a vertical two-dimensional (2D) domain, the FNWM requires a layout of a large number of 2D grid points for intensive calculations, which is considered computationally expensive. However, the CAN model can perform calculations under a one-dimensional grid system for the fluid regions outside of a partially immersed box-type body. The solutions are determined analytically for the region beneath the body. The CAN model is more efficient in producing the results. Additionally, the FNWM will encounter the typical instability issue when solving the equations at the corner points of the fluid domain unless special numerical treatments or approximations are applied at those grid points. Those approximated numerical procedures may affect the accuracy of the calculations at the interfacial regions. As for the CAN model, the solutions for the fluid region beneath the body (including the corner points) are analytically determined; the calculation of the vertical force can be more accurately and effectively evaluated. Considering the prediction of the wave profiles, the CAN model can calculate the free-surface elevations directly by solving the Boussinesq equations and does not need the implementation of special numerical techniques to capture the movement of the free surface as the FNMW does.
The CAN approach applied in this study integrates the procedure of numerical simulations of the propagation and diffraction process of the cnoidal waves in the region outside of a fixed and partially immersed rectangular body (outer region) and analytical calculations of the flow solutions in the region beneath the body (inner region). Presented in the following two sections are the basic model equations, boundary conditions, initial conditions, and derived solutions with calculation procedures for the domains of the outer and inner regions.
4. Force Calculations
In addition to the prediction of wave transformation using the CAN model as described above, the induced hydrodynamic forces on the body are important variables to be determined. With the model calculated free-surface elevations and velocity components, the dimensionless horizontal force per unit width,
, and vertical force per unit width,
, can be computed by integrating the pressure along their corresponding structural surfaces, where
and
are, respectively, the dimensional horizontal and vertical forces per unit width. We have:
where
and
are, respectively, the dimensionless pressure distributions in the outer and inner regions. The pressure is calculated from the unsteady Bernoulli equation expressed with the dimensionless form as
where the dimensionless pressure
and
is the dimensional pressure. In Equation (35),
can be either the outer velocity potential
or the inner velocity potential
. The velocity potential
that is required for the determination of pressure
is computed using Equation (3) with the inputs of numerically determined depth-averaged velocity potential
.
5. Experimental Measurements
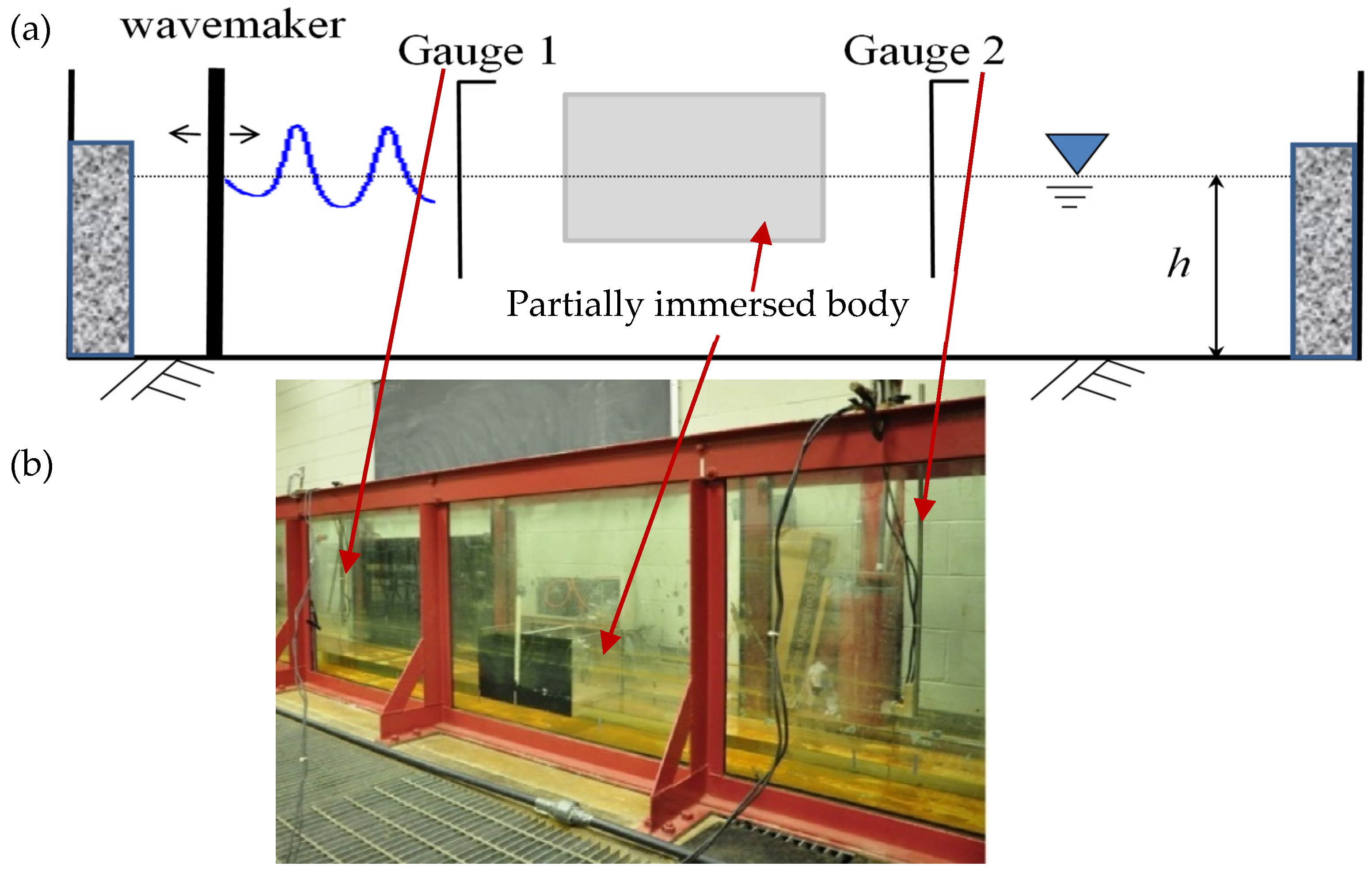
To confirm the solutions of free-surface elevation obtained from the present CAN model, laboratory measurements were performed in a glass-walled wave tank with dimensions of 762 cm (25 ft) in length, 30.48 cm (1 ft) in width, and 91.44 cm (3 ft) in height. A sketch and a photo showing the experimental setup in the wave flume are presented in
Figure 2.
A Tolomatic linear-actuator-controlled piston-type wavemaker was used at one end of the tank to generate the desired cnoidal waves. The accuracy of the actuator motion is 3.175 × 10−4 cm. Porous-type structures were placed at the other end of the tank to eliminate waves reaching there. Two resistance-type wave gauges (Gauge 1 and Gauge 2) were installed in the flume to record the wave elevations at the locations of interest. The data-sampling rate is 20 HZ. The wave gauges were calibrated carefully in which a good linear correlation with the coefficient of determination = 0.998 between the voltage and water surface level was achieved. One gauge was installed in between the wavemaker and body for measuring the incident and reflected waves while the other one was placed behind the body to record the transmitted waves. The bodies with three different sizes (or thicknesses), namely 4, 6, and 10 times of the water depth, were made of plexiglass. For the model tests, the water depth was set at 7.62 cm (0.25 ft).
The position of a moving wavemaker determines the desired wave to be generated. For nonlinear shallow-water waves, the wave paddle position
can be described by the following mass conservation equation [
26]:
By solving Equation (36) with the input of a given cnoidal wave condition (Equation (11)), the positions calculated can be used to control the motion of the wavemaker. Due to the length limitation of the wave tank, waves covering four wave periods were generated for data collection. As waves were generated from a quiescent water surface condition, a smaller leading wave front followed with three fully developed cnoidal waves was observed (see
Figure 3).
Various parameters that affect the outcomes of the reflected and transmitted waves were tested. Waves with wave heights ranging from 0.15 to 0.3 and wave lengths of = 10, 15, and 20 were generated to examine the effect of wave conditions. The effects of structural thickness and submerged depth (or draft) on transmitted waves were also examined. The thicknesses of the tested bodies include L* = 30.48, 45.72, and 76.2 cm (or in dimensionless form, 4, 6, and 10). Each tested body was also placed at two different draft positions namely 1.524 cm and 3.81 cm (or in dimensionless values, 0.2 and 0.5) for the lab tests.
7. Conclusions
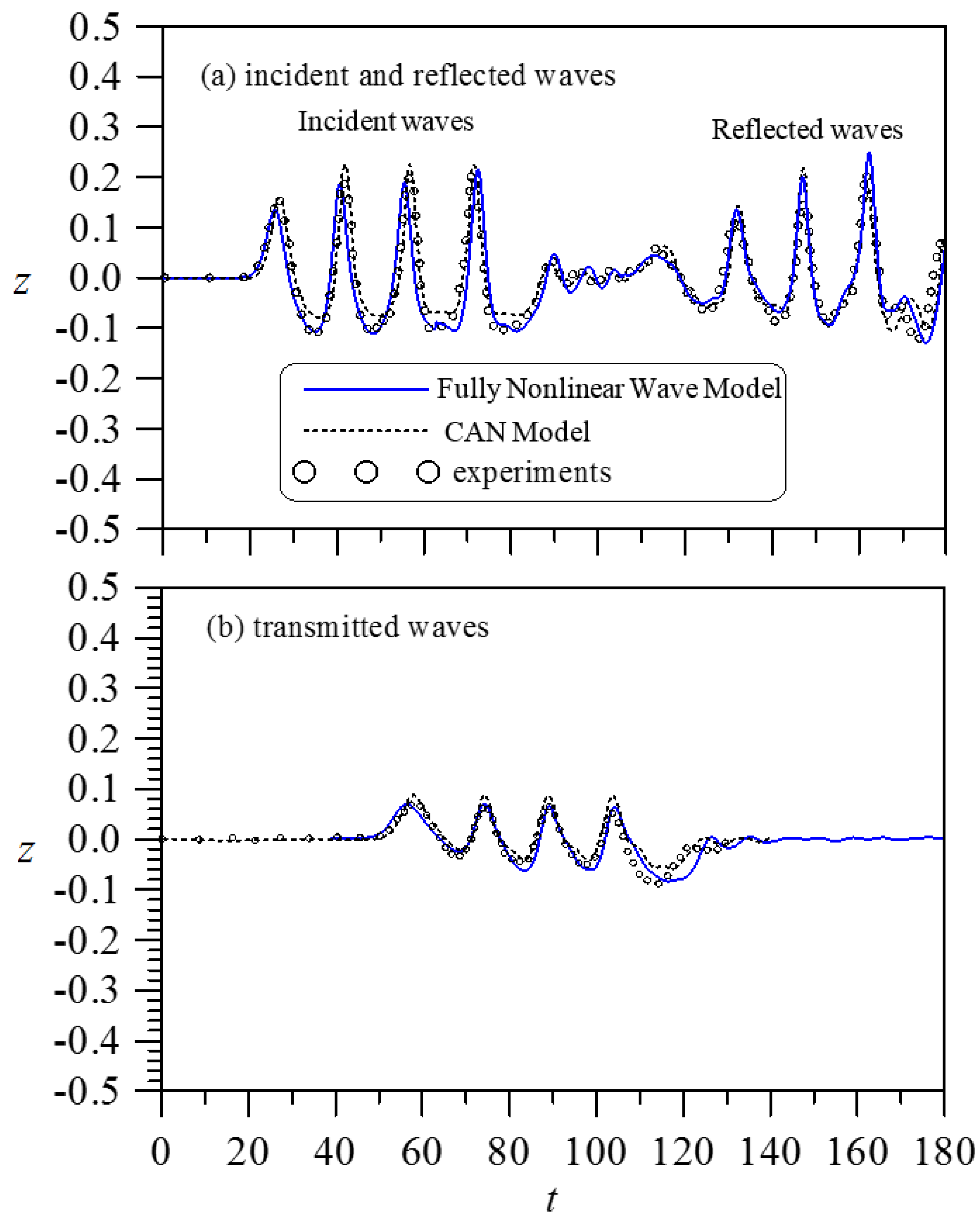
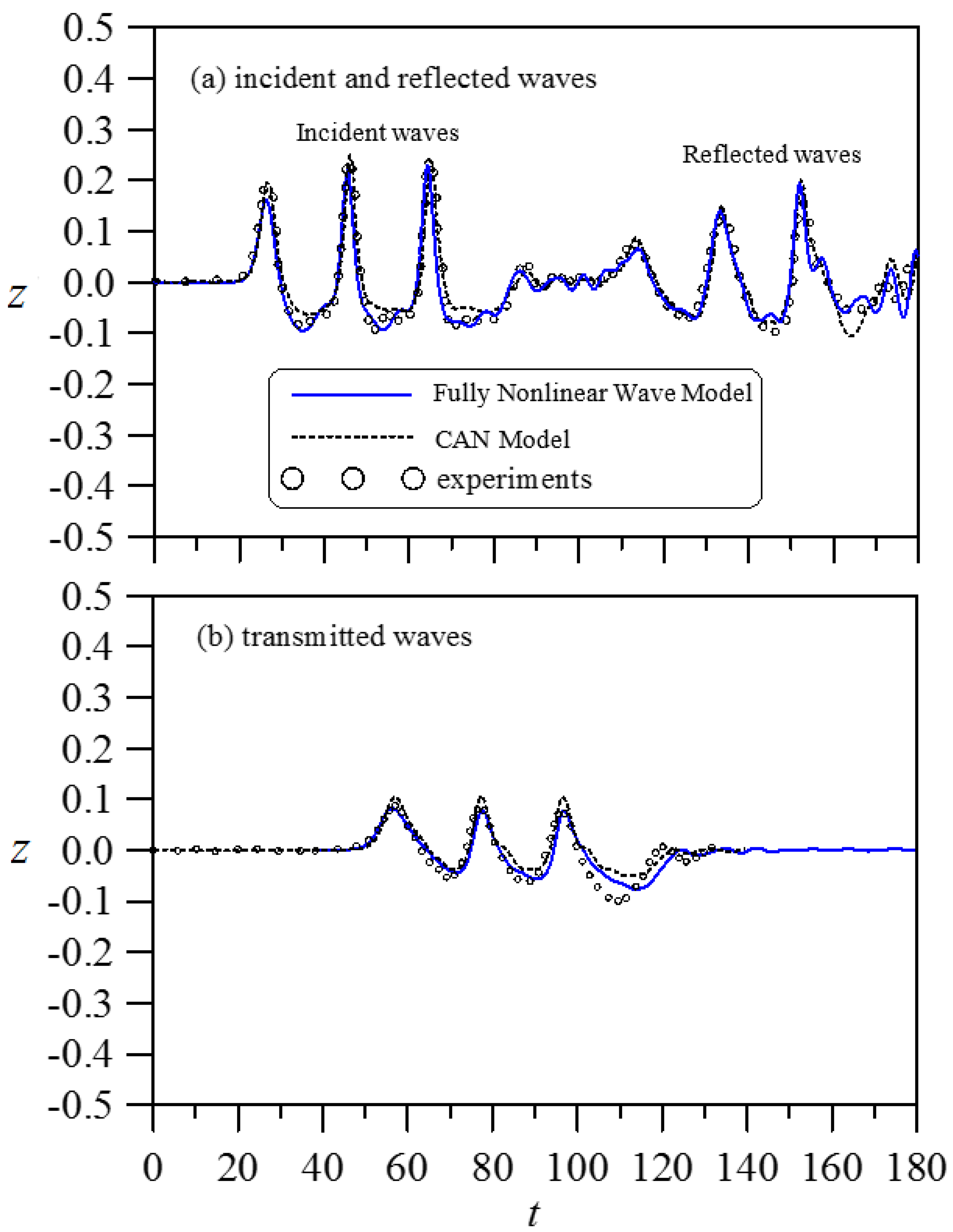
This paper introduced a combined analytical and numerical (CAN) model to simulate the scattering of a cnoidal wave by a partially immersed stationary 2D body. The model performance was examined by comparing the simulated wave elevations with the measured data. The computed horizontal and vertical forces on the body were compared with the results obtained numerically from a 2D fully nonlinear wave model (FNWM) for validation. The proposed approach integrated the inner analytical solutions with the outer numerical results through the formulations derived from the matching conditions set at the interfaces that separated the interior domain beneath a partially immersed body and the exterior domain of the upstream and downstream of the body. When simultaneously solving the derived matching equations with the outer finite-difference numerical formulations of the Boussinesq equations, the velocity potentials, free-surface elevations, and wave forces along the horizontal and vertical directions can be effectively determined. Wavetank tests for selected wave conditions with a partially immersed body of varying thickness and draft were carried out to record the incident, reflected, and transmitted waves for verification of the model predictions.
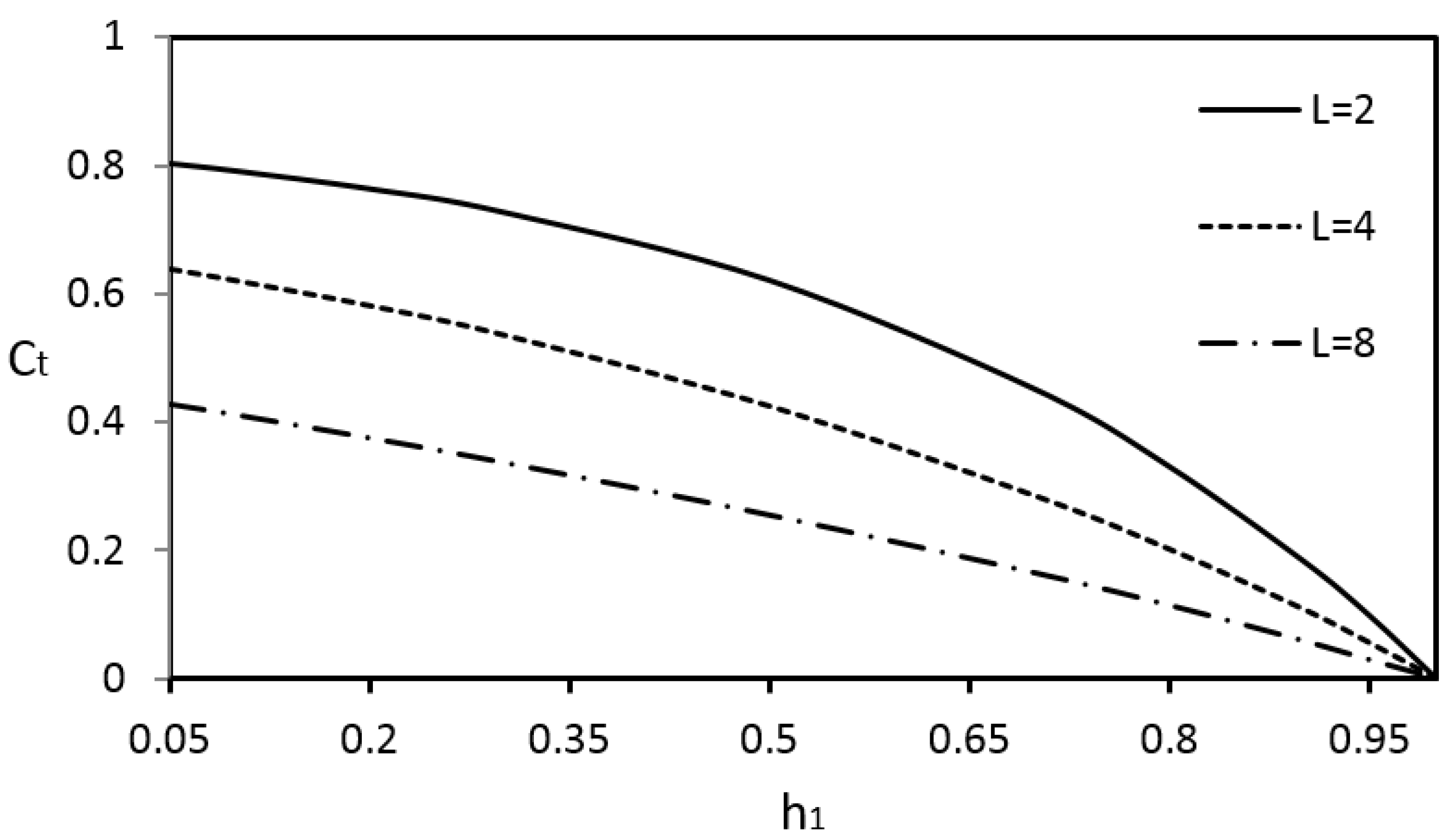
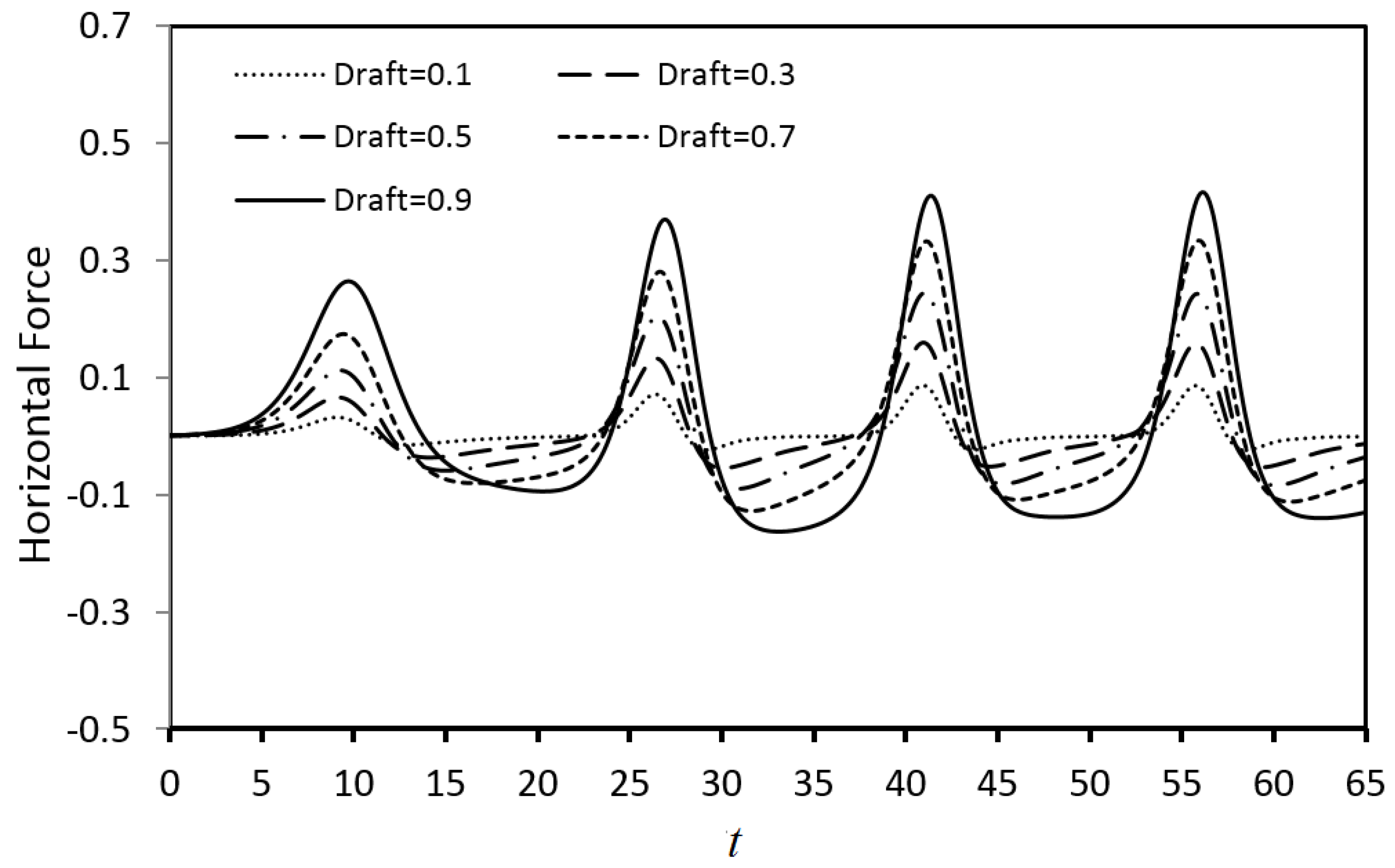
It was found that both the reflected and transmitted wave profiles obtained from the present CAN model agree reasonably well with the measured data. In general, the reflected or transmitted wave peak was slightly over-estimated due to the negligence of the effects of energy dissipation and fluid viscosity in the model development. The CAN model produced much smaller comparison errors in wave peak predictions when the case of a relatively longer wave length, smaller incident wave height, smaller body draft, or smaller body thickness was considered. The time variations of the cnoidal wave-induced forces were calculated. Due to the limitation of the equipment setup and a relatively small wave tank, the wave forces were not measured. It was found that the horizontal forces computed from the present CAN model matched closely with the results from a fully nonlinear wave model (FNWM). In terms of the vertical forces, the CAN model was able to predict a similar variation trend as those from the FNWM with slightly greater values of the maximum force. Additionally, the proposed CAN model, if applied to a simple parametric investigation, can provide the expected trends in terms of applied forces, wave reflection, and transmission, such as when the body draft or its thickness increases, the transmitted wave height decreases, and the maximum horizontal force increases.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}