1. Introduction
The 2004 Indian Ocean earthquake of magnitude 9.1 and the related tsunami resulted in the most severe casualties from an earthquake recorded to date. In 10 countries across South Asia and East Africa, the disaster resulted in over 283,100 deaths, 14,100 missing, and 1,126,900 displaced people. Most of the deaths were due to the inundation process caused by wave overtopping from the tsunami. Additionally, the Fukushima nuclear plant was damaged by the 9.1-magnitude 2011 Tohoku earthquake and tsunami. As the tsunami inundated the Fukushima nuclear plant, emergency generators and coolant intake pumps became unusable, leading to a meltdown and explosions, thus exposing the surrounding area to radiation. The plant is still in the process of restoration and does not have a definite restoration timeline. The International Atomic Energy Agency designated this as a Level 7 (major) accident, which is the highest risk designation on the International Nuclear and Radiological Event Scale and is the same as that of the 1986 Chernobyl disaster.
The direct damage by a tsunami is caused by a process that leads to shockwaves, run-up, wave overtopping, and inundation. Hence, researchers have actively studied shoaling and run-up by applying solitary waves or tsunami-like waves rather than tsunamis in coastal areas [
1,
2,
3,
4,
5,
6]. There have also been numerous theoretical [
7], experimental [
6], and numerical [
8,
9,
10,
11,
12,
13] studies on the overtopping of tsunami-like waves or solitary waves formed from run-up.
Most studies on tsunami inundation involve physical modeling tests and numerical analysis applied to coastal cities or fringing reefs. Rueben et al. [
14] conducted a representative study by considering coastal cities, built a 1/50-scale model of the town of Seaside, Oregon, USA, in a large tank, and reported that macro-roughness introduced by elements such as structures and houses reduces the bore speed by 40% when a tsunami-like wave passes over them. Additionally, Shin et al. [
15] and Park et al. [
16] conducted a numerical analysis by applying the experimental conditions of Rueben et al. [
14]; as in the experiment, the maximum momentum flux occurred near the shoreline and decreased as it moved inland. Shin et al. [
15] represented the coastal city three-dimensionally in a 3D large eddy simulation (LES) model based on the Navier–Stokes (NS) equation, which can analyze a two-phase flow. Park et al. [
16] used COULWAVE [
17,
18,
19], a depth-integrated numerical model based on the Boussinesq equation that can account for the bottom-stress-driven turbulence effect, to study the inundation height, flow velocity, and momentum flux according to the coefficient of friction. Prasetyo et al. [
20] used a 1/250-scale physical model, 2D nonlinear shallow-water equation model, and quasi-three-dimensional model and found that the effects of macro-roughness on tsunami inundation in the town of Onagawa, Miyagi Prefecture, Japan, when the 2011 Tohoku tsunami passed, were similar to those reported in previous studies. Yasuda et al. [
21] recognized the necessity to accurately predict tsunami inundation and compared and reviewed various numerical model results with the 1/250-scale physical modeling results of Prasetyo et al. [
20]. They experimented with a 1/250-scale model and confirmed that, in a complex urban area such as the town of Onagawa, the resolution of the topographic data is an important parameter in the inundation analysis and suggested a topographic resolution of 1 cm intervals as a sufficient condition by considering the computational cost and accuracy.
Revetments and levees are constructed on coasts to protect life and property (land and structures) from ocean forces such as waves and tides. Initially, nearly vertical impermeable structures such as stone walls were installed on coasts to protect the foundation from ocean forces. Recently, however, with the development of various wave-absorbing blocks, wave dissipation methods have also been applied to protect the coasts from wave overtopping. As for recent research trends on wave overtopping, various studies are considering the response to climate change, eco-friendliness, and advanced technology. Wave overtopping studies using physical modeling test considered introducing artificial coral reefs to existing structures, providing eco-friendly and biological advances to improve climate change resilience [
22,
23]. Various retrofitting structures (diffraction pillars, reef breakwaters, vegetation, and recurve walls) were investigated to reduce wave overtopping [
24,
25], considering climate change resilience. In addition, Dong et al. analyzed wave impact pressure and overturning moment generated from the wave impact force by applying a retrofitting recurve wall to evaluate the safety of the structure and wave overtopping reduction of the structure with retrofitting [
26]. Furthermore, studies were conducted to quantify the wave-by-wave overtopping volume [
27] and to analyze the spatial distribution of the overtopping discharge behind the structure [
28]. For the numerical modeling, as the utility of the smoothed particle hydrodynamics model has recently increased in the field of coastal marine engineering, it is being applied to the calculation of wave overtopping, impact, and runoff [
29,
30]. However, most wave overtopping studies have focused on periodic waves; even the EurOtop guideline, which contains numerous research results on wave overtopping, has limited information on the reduction effects of the wave dissipation methods in wave overtopping and inundation of bores and long-period waves such as tsunamis [
31,
32].
Lee et al. [
33] conducted physical modeling and numerical analysis of the overtopping of solitary waves in vertical revetments (VRs) and wave-absorbing revetments (WARs). They demonstrated that for a high wave, the overtopping rate of the VR was less than that of the WAR, owing to the effect of the wave absorber. However, they reported that under the condition
, the overtopping rate of the WAR was greater than that of the VR (here,
is the solitary wave amplitude and
is the depth). For such a VR or WAR, overtopping of the solitary wave leads to land inundation. Unfortunately, as Lee et al. [
33] measured the overtopping rate in a tank installed on land, their findings have many limitations in the understanding of the inundation characteristics of solitary waves. Since phenomena such as run-up, wave overtopping, and flooding that occur in the coast directly affect property damage, it is necessary to clearly analyze the characteristics of inundation in the land area according to the revetment type.
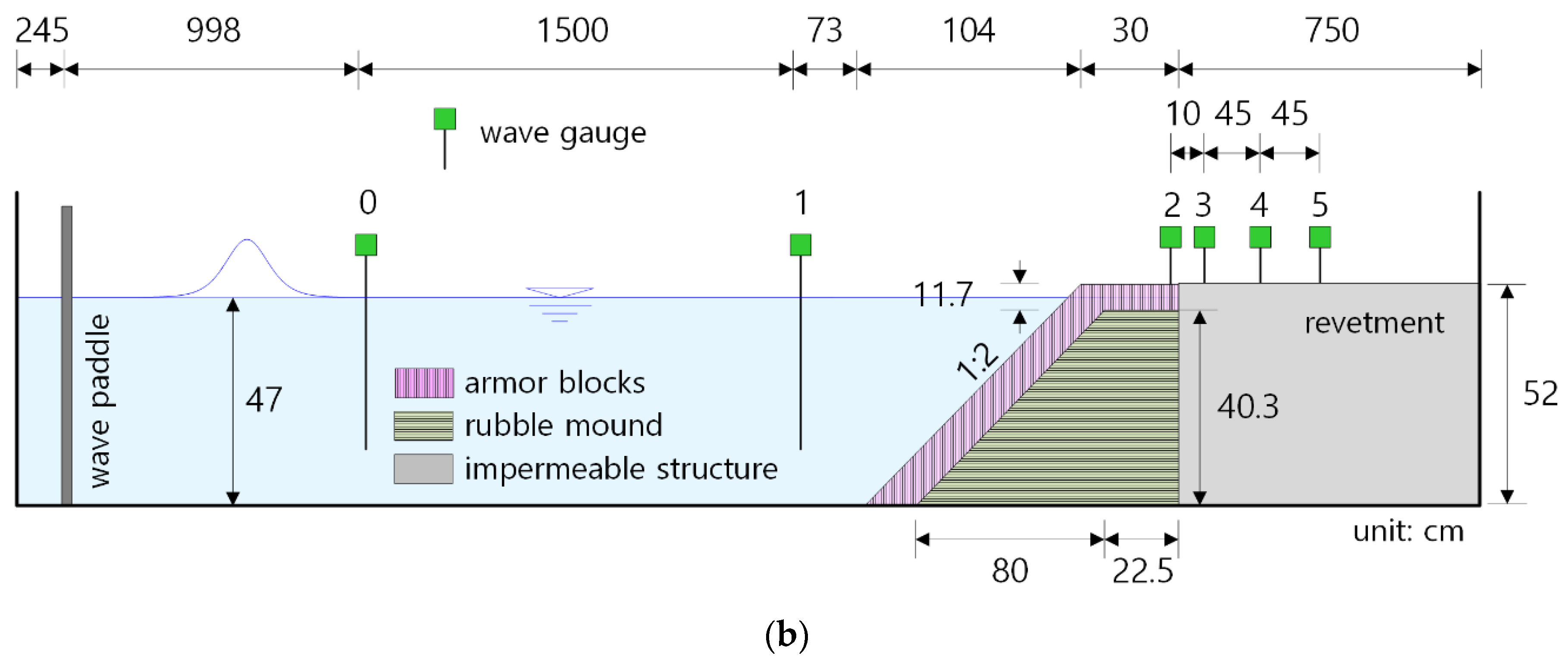
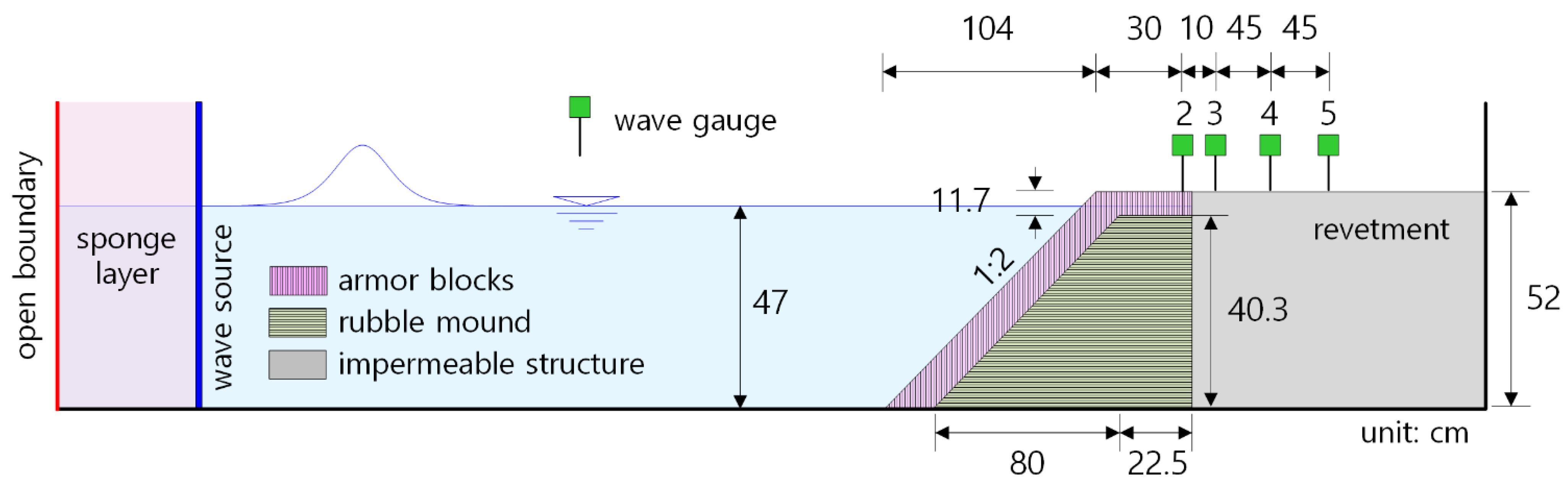
In this study, the inundation of solitary waves in VR and WAR was analyzed using experimental and numerical methods. First, VR and WAR were installed in separate experimental tanks; the water surface elevation was measured when the solitary wave entered the tank, and the inundation characteristics on the land area were examined. We simulated the spatiotemporal wave field, flow field, and vortex field during the overtopping and inundation of the solitary waves in a numerical wave tank (NWT) with the same specifications as the experimental tank. Finally, we performed an in-depth analysis of the influence of hydraulic characteristics related to solitary wave overtopping and inundation on the inundation height and distance.
5. Numerical Analysis Results
5.1. Wave Field and Flow Field
5.1.1. Overtopping and Inundation Process
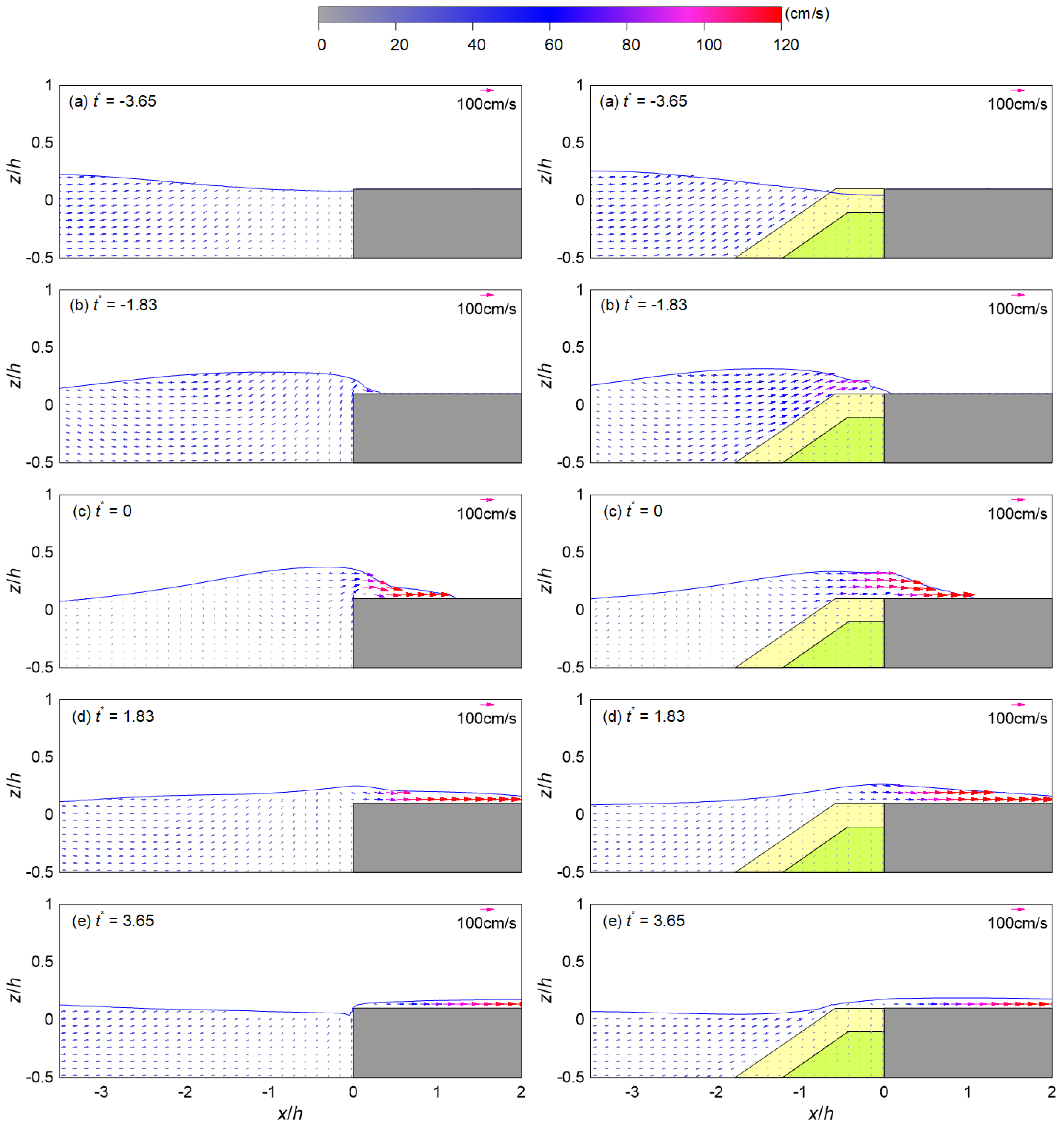
To compare the wave field and flow field changes in the solitary wave overtopping and inundation process at the VR and WAR, the representative incident conditions of Run-7 (
,
) are shown in
Figure 15. In
Figure 15c,
indicates the moment the maximum water surface elevation occurs in front of the impermeable vertical wall at
; the wave and flow fields are shown at
intervals based on (c). The horizontal and vertical distances (
,
) are nondimensionalized using the depth
. In addition, the magnitude of the flow velocity can be determined from the vector scale and color scale.
In the results of the WAR shown on the right of
Figure 15b, the flow cross-sectional area was reduced due to the wave absorber, causing the flow velocity of the solitary wave to significantly develop along the slope and the horizontal velocity to become dominant during the overtopping. The VR does not have a wave absorber. In the VR results on the left in
Figure 15a, the horizontal velocity of the solitary wave is rapidly converted to vertical velocity owing to the blocking of the impermeable vertical wall, causing the water surface elevation to rise and overtopping to begin, as shown in
Figure 15b. Additionally, for the VR on the left in
Figure 15c, at the point where the maximum water surface elevation occurs at the edge of the vertical wall, flow separation occurs at the revetment crest because the solitary wave flow cannot bend by 90°. In contrast, for the WAR on the right of
Figure 15, the flow passing through the wave absorber to the upper section is weak, and flow separation does not occur at the edge of the vertical wall because the horizontal flow is dominant above the crest.
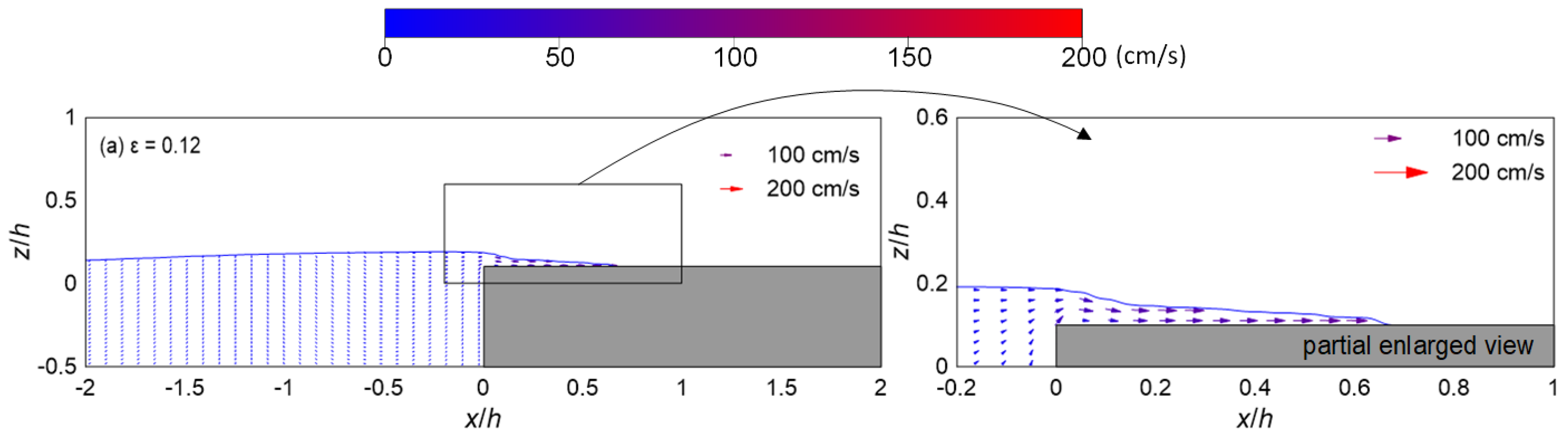
5.1.2. Flow Field Distribution
Figure 16 shows the wave and flow fields in detail at the point (
) when the maximum water surface elevation at
(the edge of the vertical wall) in the VR, and
Figure 17 shows the corresponding data for the WAR. The representative solitary wave conditions of Run-2 (
,
), Run-7 (
,
), and Run-10 (
,
) are shown in (a), (b), and (c), respectively.
When the solitary wave acts on the VR in
Figure 16, the flow cannot bend sharply by 90° at the edge. Hence, flow separation occurs at the crest, and a separation region is formed. As
increases, the flow velocity of the solitary wave increases, and it becomes difficult for the flow to sharply change its direction; this causes the flow separation to strengthen and the separation region to expand further. Consequently, the flow velocity of the separated flow is greater than that near the water surface, and the gradient of the spatial waveform of the solitary wave steepens. Moreover, a reversed flow gradient (
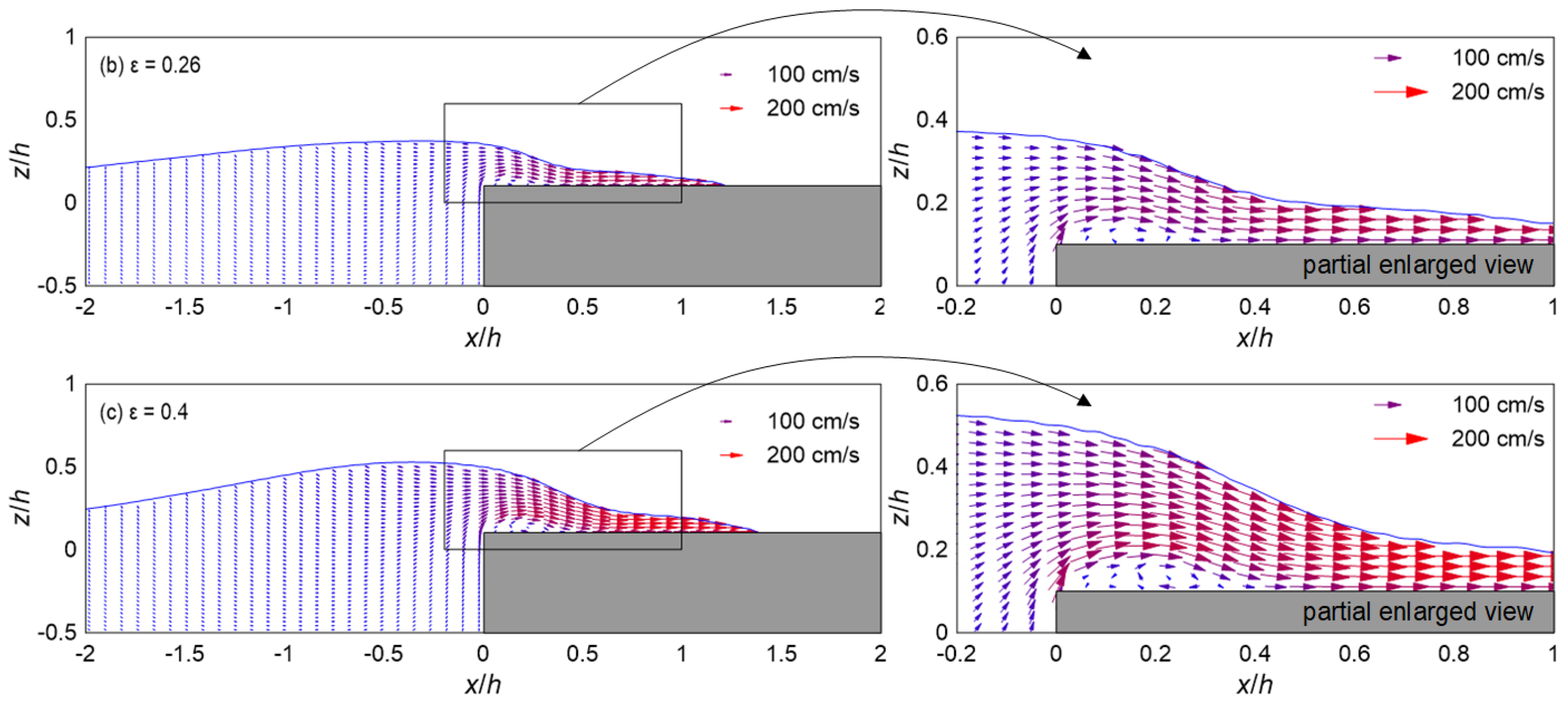
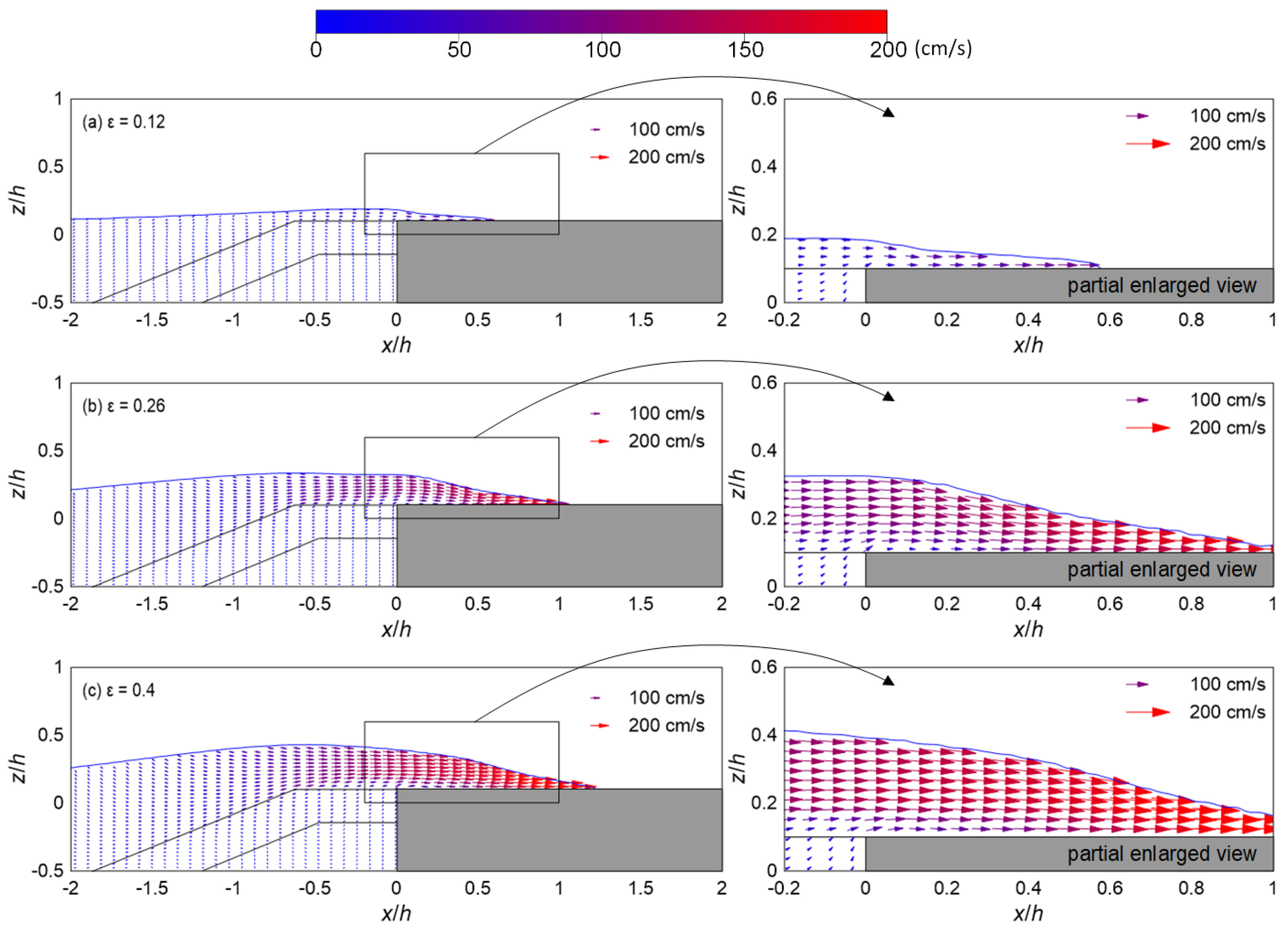
) may occur in the separation region owing to the reversed flow. For the WAR in
Figure 17, the horizontal flow of the solitary wave is dominant above the wave absorber. Hence, in
Figure 17c, where
is large, flow separation does not occur. Thus, as observed in the experiment, the rise in water surface elevation at the VR, owing to the increase in the drag caused by the flow separation during overtopping, is larger than that at the WAR. In addition, at the WAR, with no sudden change in direction and no flow separation, the horizontal velocity is dominant during the inundation process, and the flow velocity gradient near the floor is smaller than that at the VR. The rise in water surface elevation during solitary wave overtopping and flow separation at the edge of the vertical wall during the inundation process is considered to greatly affect the solitary wave inundation in the land area.
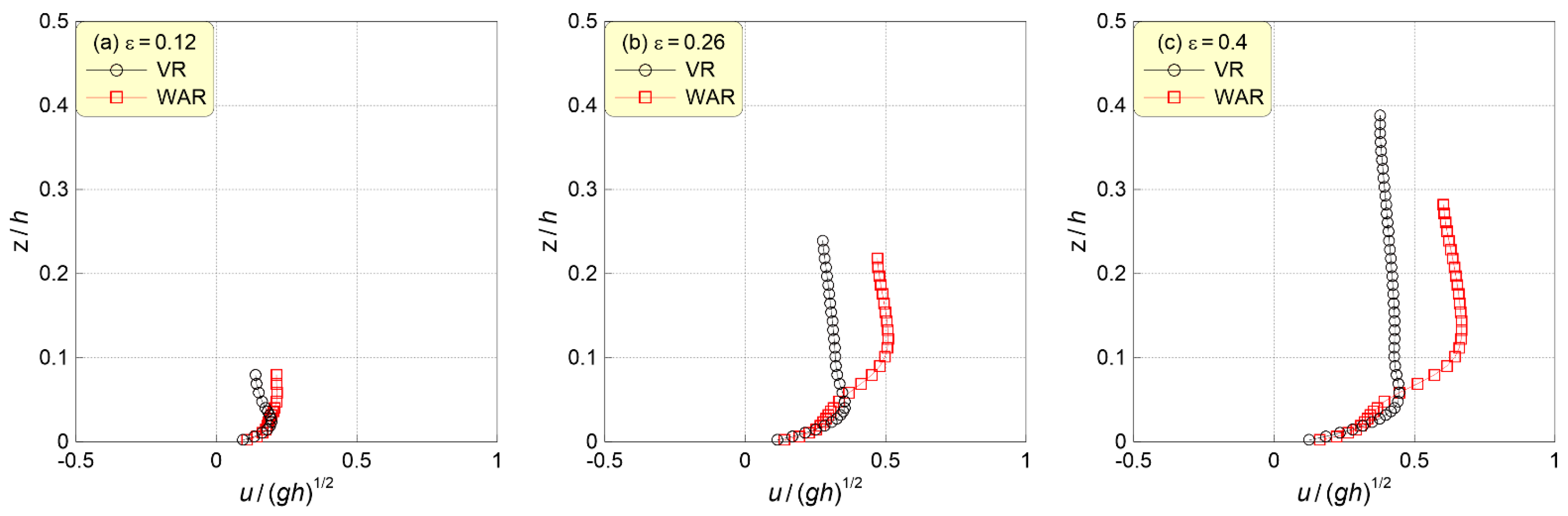
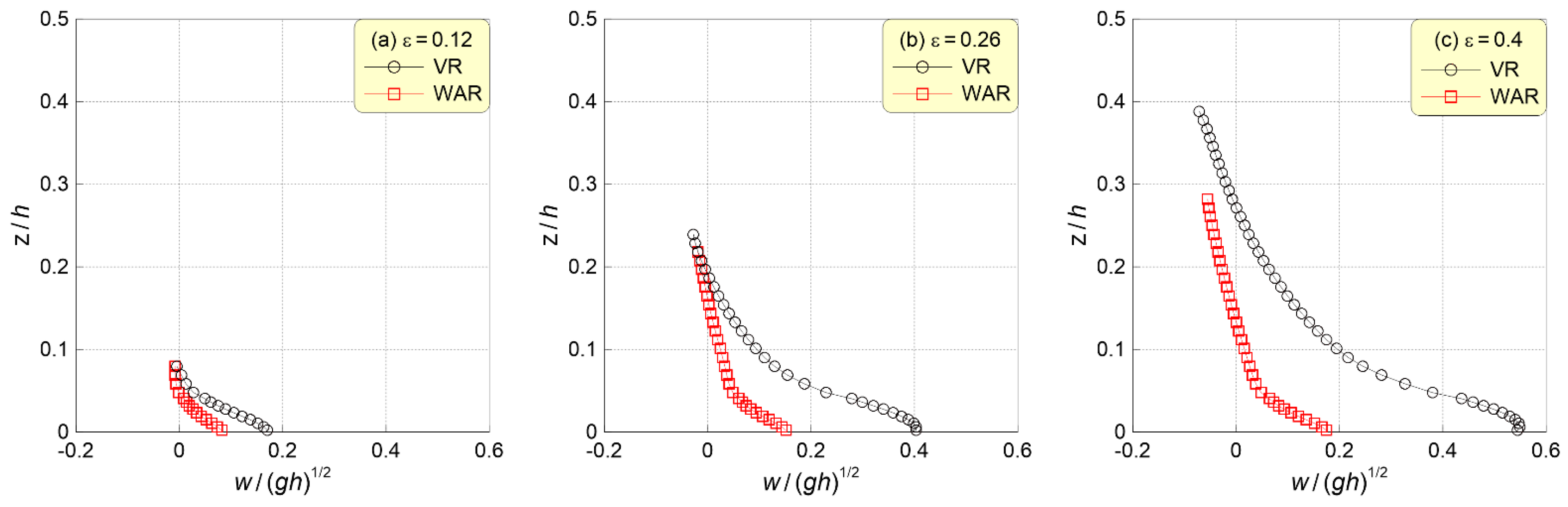
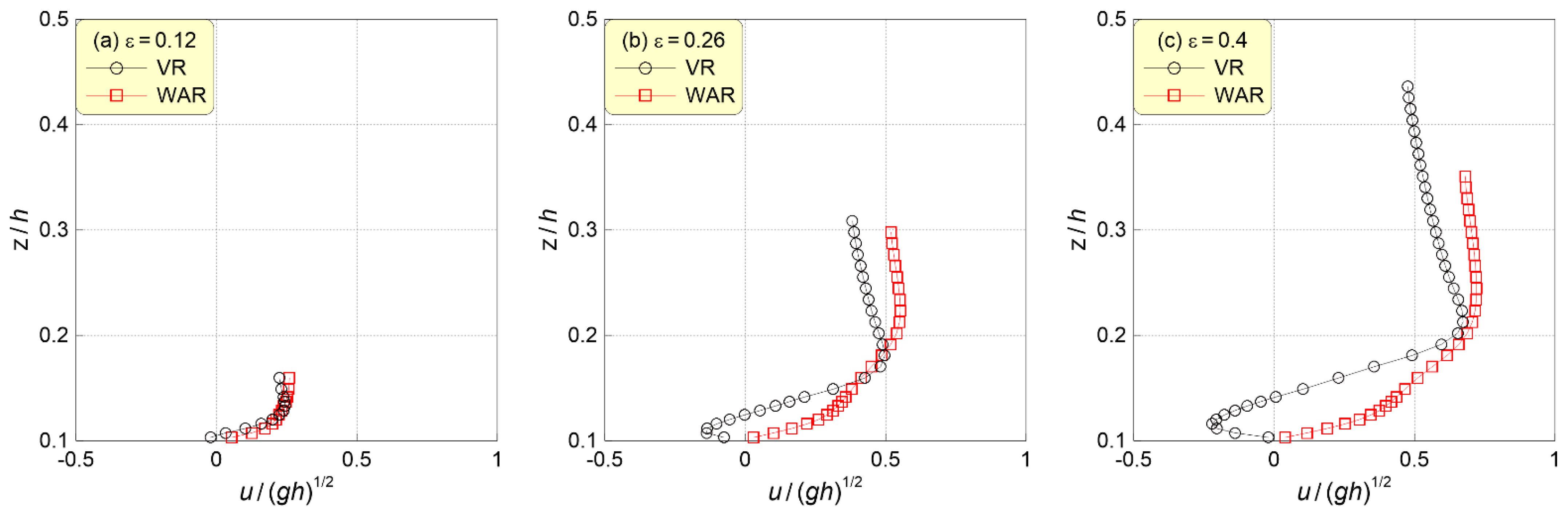
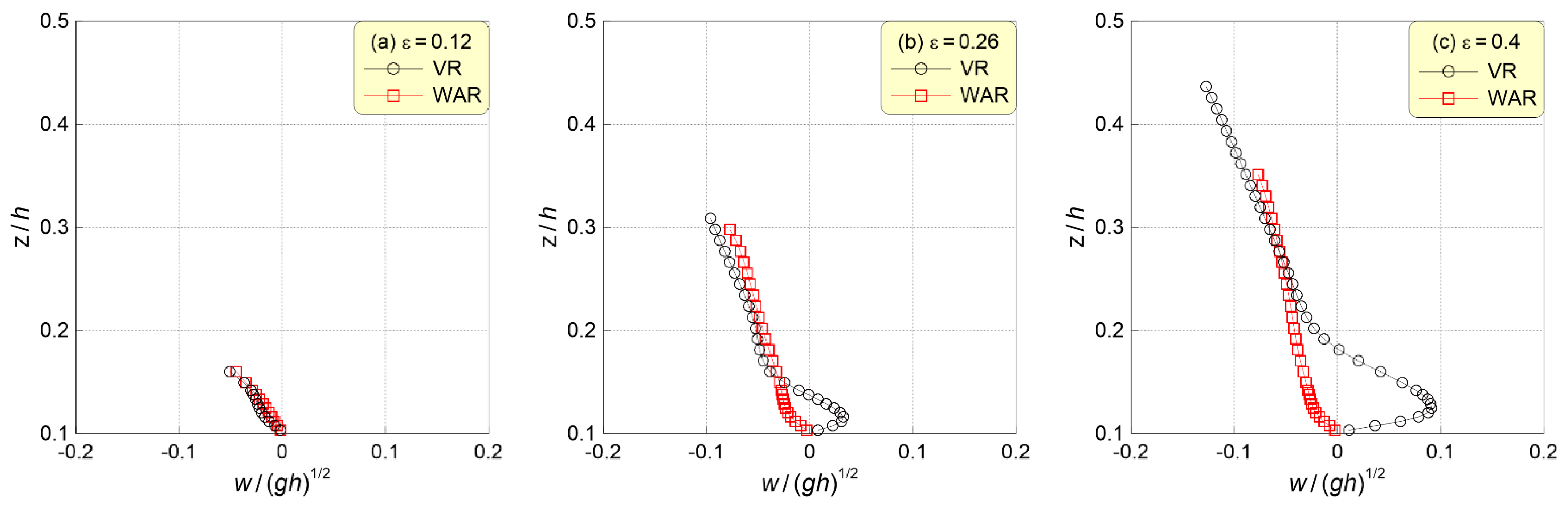
5.2. Vertical Flow Velocity Distribution
Figure 18 and
Figure 19 show the vertical distributions of the horizontal and vertical velocity components (
,
) when the maximum water surface elevation occurs at the edge of the vertical wall at point
, and
Figure 20 and
Figure 21 show the corresponding data at the center of the flow separation region. The solitary wave conditions of Run-2 (
,
), Run-7 (
,
), and Run-10 (
,
) are shown in (a), (b), and (c), respectively. The flow velocity components on the vertical axes of the graphs are nondimensionalized by dividing them by the wave speed (
) of the shallow-water wave, and the
direction on the horizontal axis is nondimensionalized using
.
As discussed for the wave and flow field section of the physical modeling test and numerical analysis, during solitary wave overtopping, the flow cross-sectional area gradually decreases along the slope of the wave absorber in the WAR, thus developing a horizontal velocity, which subsequently becomes dominant, as shown in
Figure 17 and
Figure 18. In contrast, at the VR, which consists of a vertical wall, the horizontal velocity of the solitary wave is converted to vertical velocity, and the upward flow dominates the flow in the propagation direction as overtopping occurs. Consequently, as shown in the physical modeling test, the rise in water surface elevation at the VR is larger than that at the WAR, and this trend intensifies as
increases.
Further, in
Figure 20 and
Figure 21, which show the vertical distributions of the flow velocity at the center of the separation region, the separated flow that develops near the boundary of the separation region at the VR causes the largest horizontal velocity, which is shown in
Figure 20b,c. In addition,
and
appear at the VR owing to the influence of the reversed flow. Conversely, at the WAR, the flow distribution of a typical open channel is observed. Furthermore, owing to the influence of the water surface gradient in the overtopping–inundation process of the solitary wave,
in the gravitational direction develops outside the separation region. At the VR, where the water surface gradient is steeper than that at the WAR,
develops to a greater extent near the water surface.
This flow velocity distribution at the VR will form strong vorticity opposite to the inside and boundary of the separation region and greatly differs from the observations at the WAR. This is also judged to have a strong influence on the solitary wave overtopping and inundation.
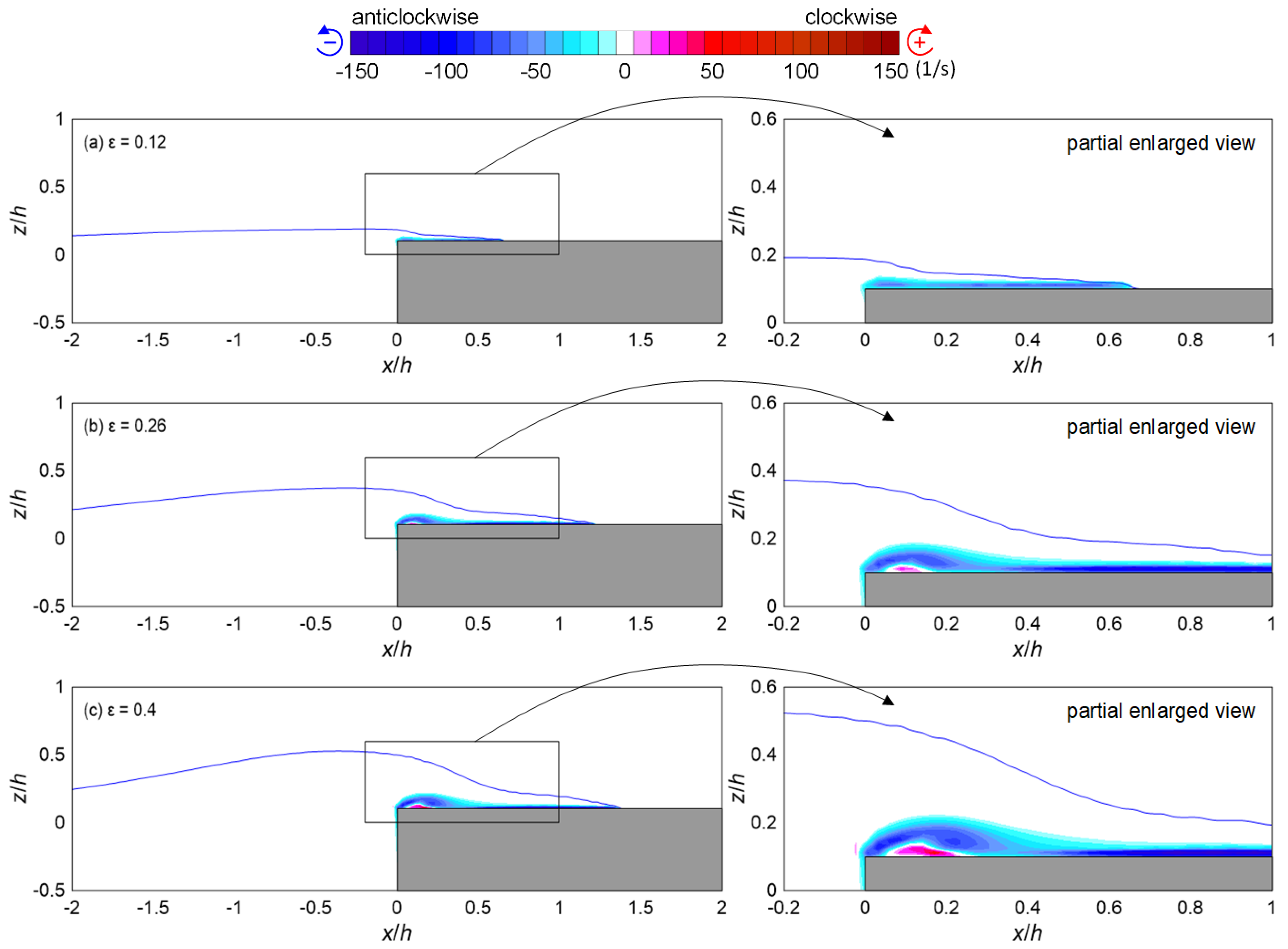
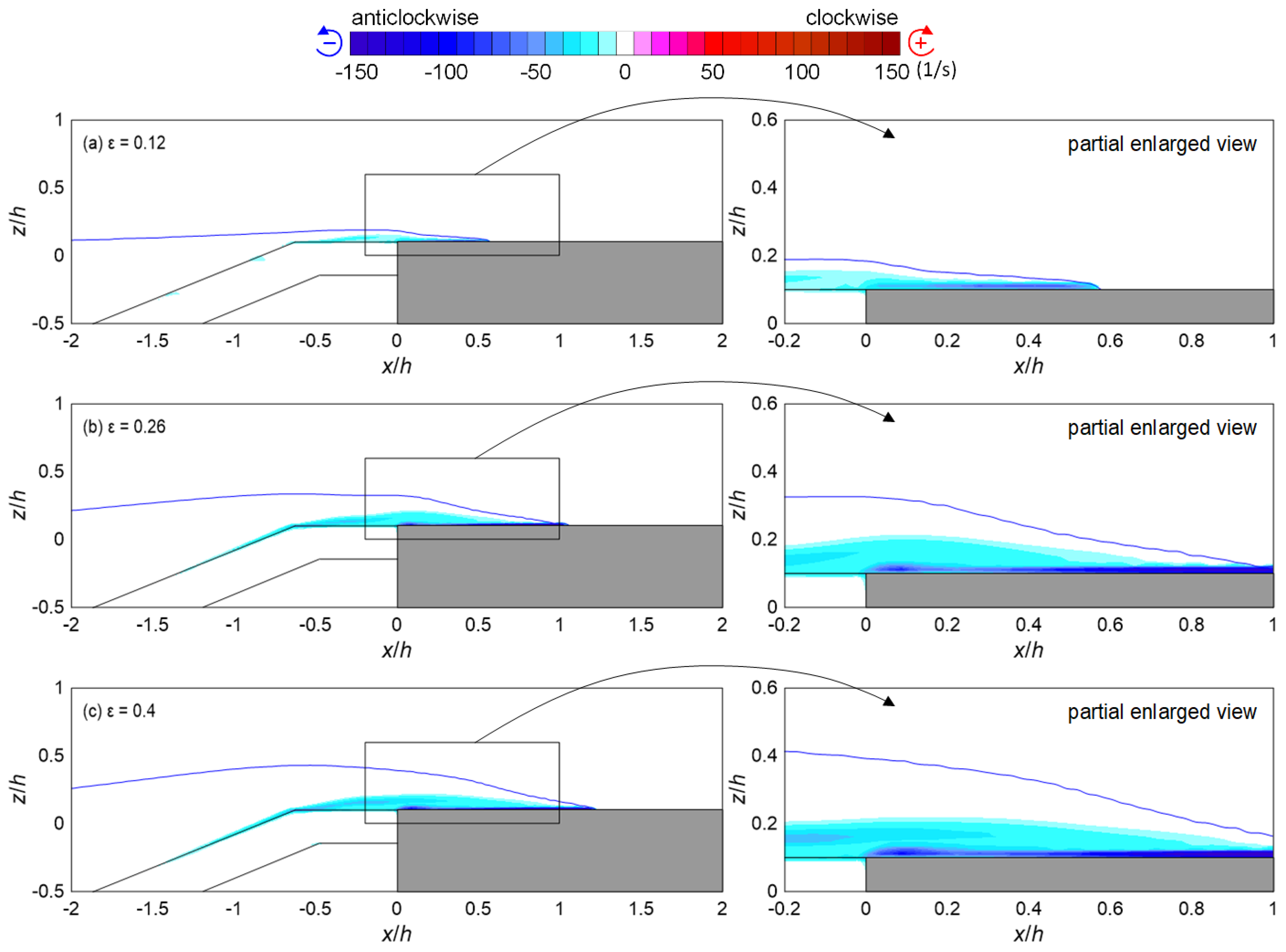
5.3. Vortex Field
To analyze the vortex phenomenon in the solitary wave overtopping and inundation process at the VR and WAR,
Figure 22 and
Figure 23 show the vortex fields at
when the maximum water surface elevation occurs at the vertical wall edge. The solitary wave incidence conditions of Run-2 (
,
), Run-7 (
,
), and Run-10 (
,
) are shown in (a), (b), and (c), respectively. The vorticity (
) is indicated in color; the red line indicates clockwise vorticity
, and the blue line indicates counterclockwise vorticity
. Here,
is calculated as follows:
Generally, because the flow velocity of the solitary wave increases as
increases, a strong
tends to occur owing to friction at the floor of the revetment, as shown in
Figure 22 and
Figure 23. At the VR where flow separation occurs (
Figure 22), as
increases, reversed flow develops in the separation region, and
strengthens. Additionally,
at the boundary of the separation region, caused by the developing separated flow, becomes stronger as
increases. This strong vortex phenomenon can dissipate the kinetic energy of the solitary wave and slow down the inundation of the land area. Further, at the WAR where flow separation does not occur (
Figure 23), there are no unusual vortex phenomena except those near the floor of the revetment and the wave absorber surface.
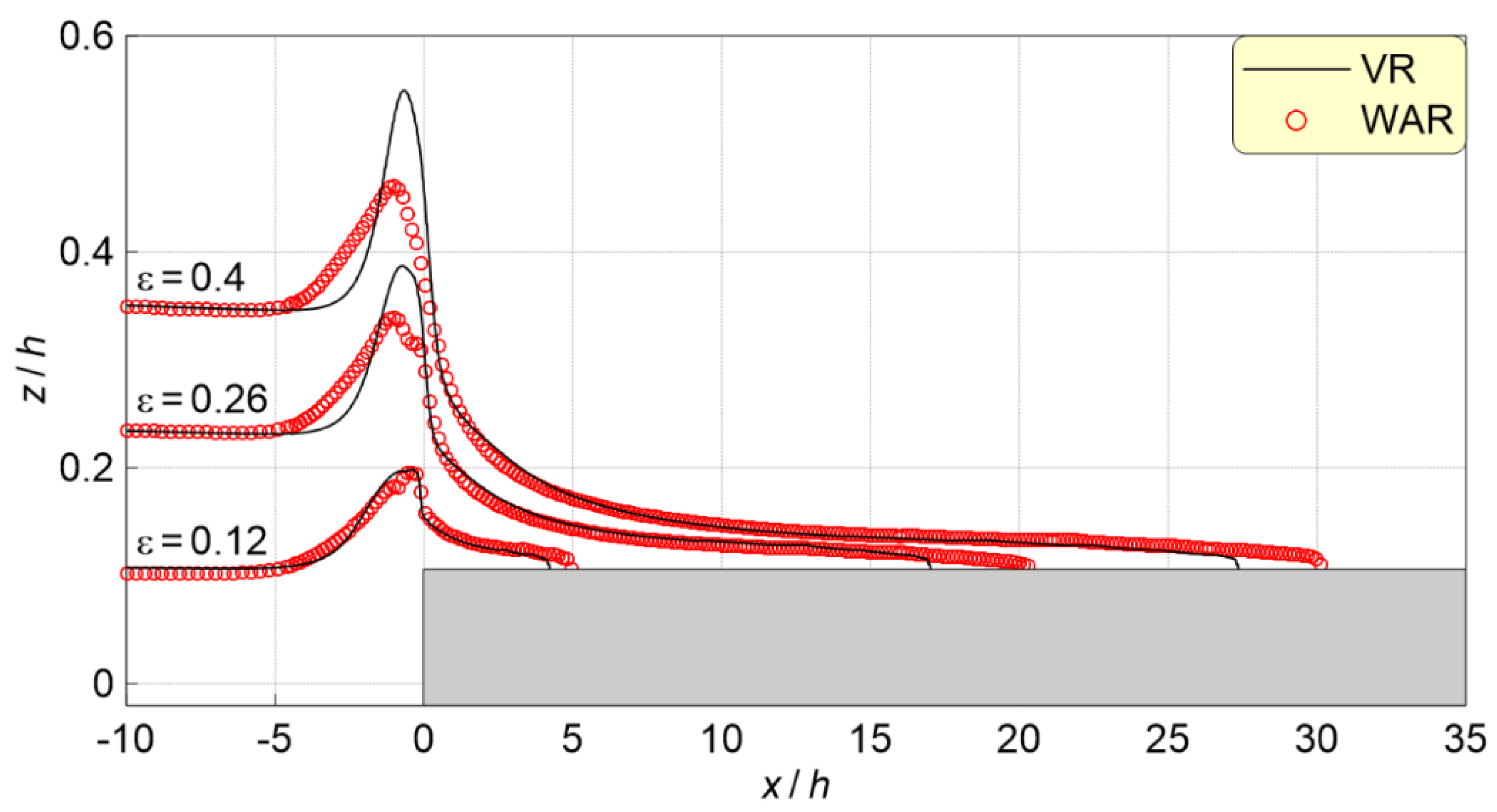
5.4. Maximum Water Surface Elevation Distribution
As in
Figure 15,
Figure 24 shows the spatial distribution of the maximum water surface elevation generated during the solitary wave overtopping and inundation process at the VR and WAR. The representative solitary wave conditions of Run-2 (
,
), Run-7 (
,
), and Run-10 (
,
) are shown in the graphs.
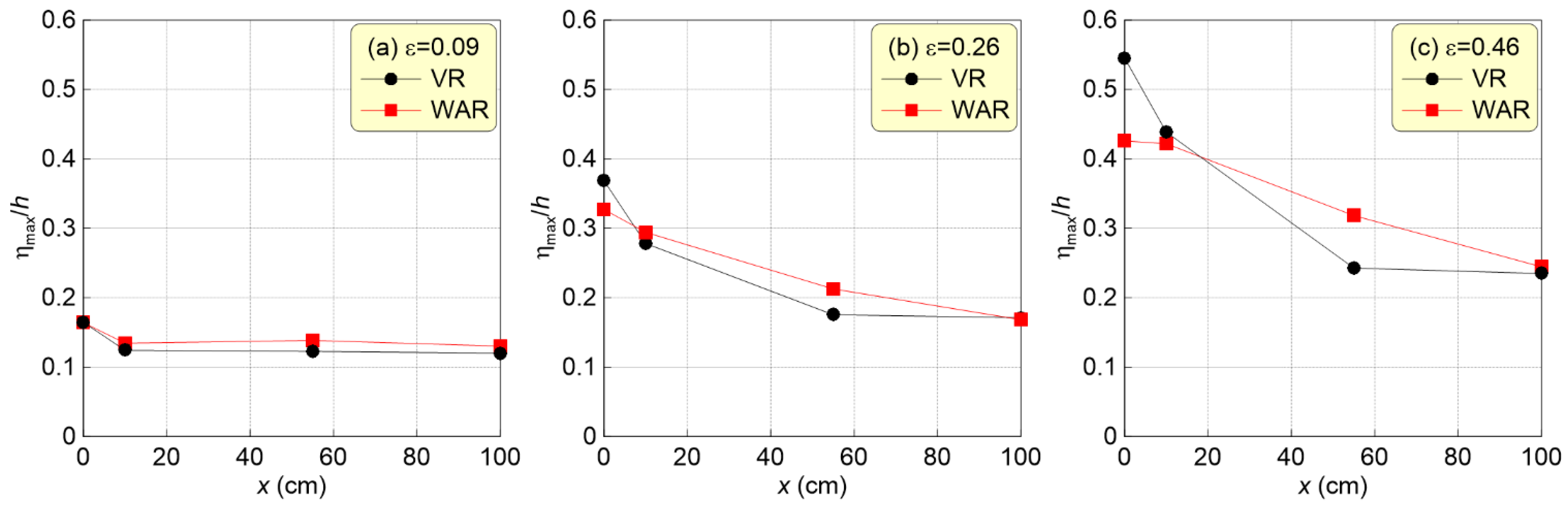
As in the physical modeling results, the difference in the maximum water surface elevation at the point at the edge of the vertical wall between the VR and WAR was not large under Run-2 conditions where is small and the effective wavelength is long. Under Run-7 and Run-10 conditions, the maximum overtopping water surface elevation at the vertical wall was larger at the VR than at the WAR, and as increased, the difference in water surface elevation tended to increase. At the VR, this can be explained by the rise in water surface elevation caused by the flow separation at the revetment crest and the conversion of the horizontal velocity of the solitary wave to vertical velocity due to the sharp decrease in the cross-sectional area because of the vertical wall, as discussed in the physical modeling test and numerical analysis. At the WAR, because the flow cross-sectional area gradually decreases along the gradient of the wave absorber, the horizontal velocity of the solitary wave becomes dominant as overtopping progresses, and the rise in water surface elevation is not large. Hence, near the shore, although the maximum inundation height is large at the VR (), as the wave propagates inland, the difference () decreases, and the height at the WAR increases (); however, this difference is not large.
The inundation distance was observed to be longer at the WAR than at the VR. This was partly because the horizontal velocity is dominant during solitary wave overtopping; however, at the VR, energy damping owing to vortex generation caused by flow separation also had a substantial effect.
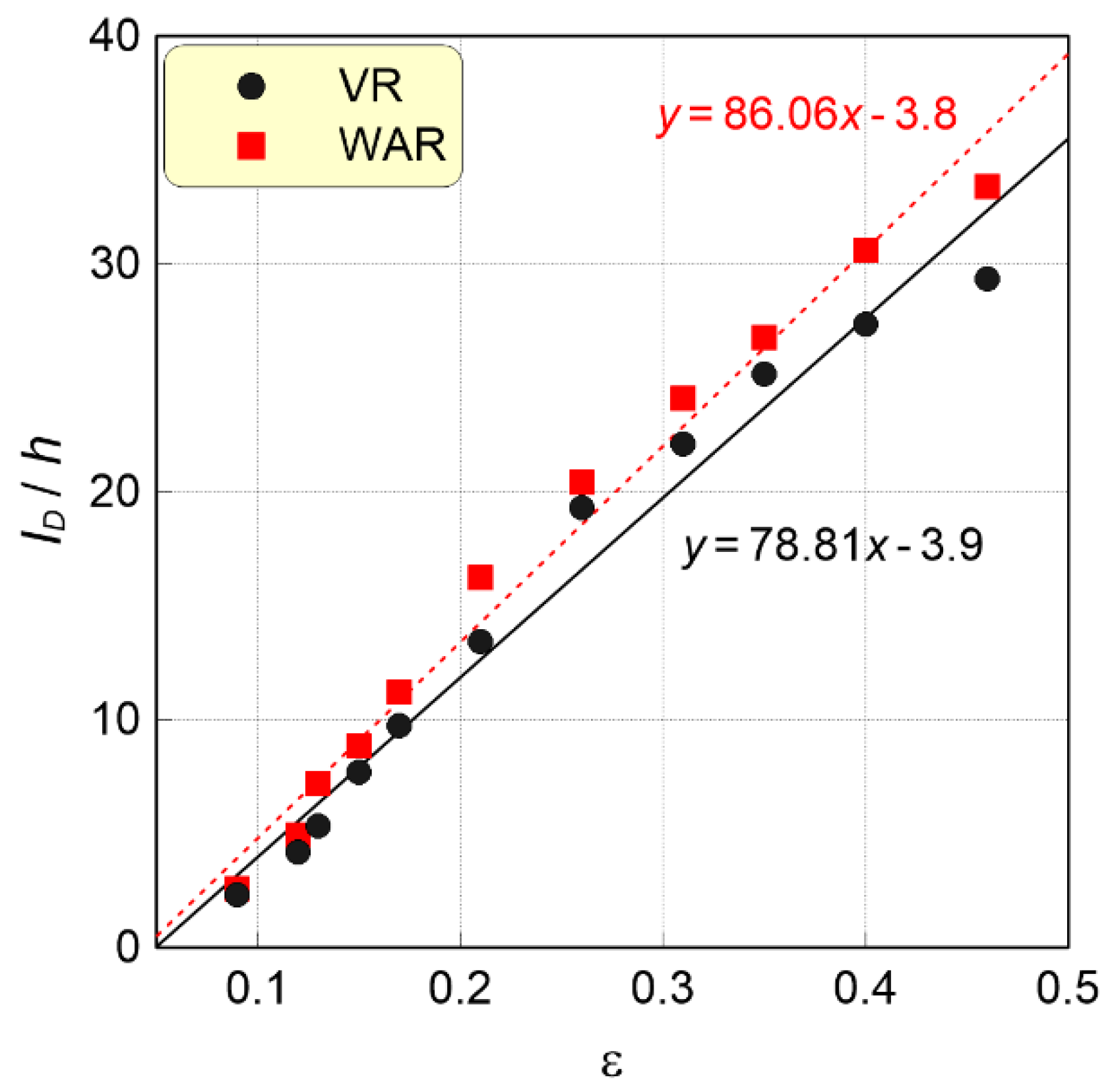
5.5. Inundation Distance
Figure 25 shows a graph of the inundation distance (
) of the solitary wave according to
at the VR and WAR, nondimensionalized using the depth (
), and
Table 3 shows the inundation data. The superscript VR or WAR next to
indicates the type of revetment.
As the incident wave height of the solitary wave increases (as increases), the inundation distance increases almost linearly. There are two reasons why the inundation distance at the VR is smaller than that at the WAR. First, at the WAR, the horizontal velocity caused by the gradual reduction in the flow cross-sectional area during solitary wave overtopping is dominant, which affects the inundation process. Second, at the VR, the drag increases owing to flow separation near the edge of the vertical wall, and energy dissipates owing to the vortexes.
Hence, a difference () occurs between the inundation distances of VR and WAR (), which increases as increases. Under the condition of , for which the incident wave height of the solitary wave is the largest, the largest difference of , occurs. Additionally, under the condition, the ratio difference is the largest at , , and becomes 35% larger than . On average, , , and is . Thus, the average inundation distance is 15% longer at the WAR than at the VR.
6. Discussion
In the results of the physical modeling test, the difference in inundation height in the land area according to revetment type was not clearly explained. Here, we will comprehensively discuss the aspects that were not explained earlier, along with the results of the numerical analysis.
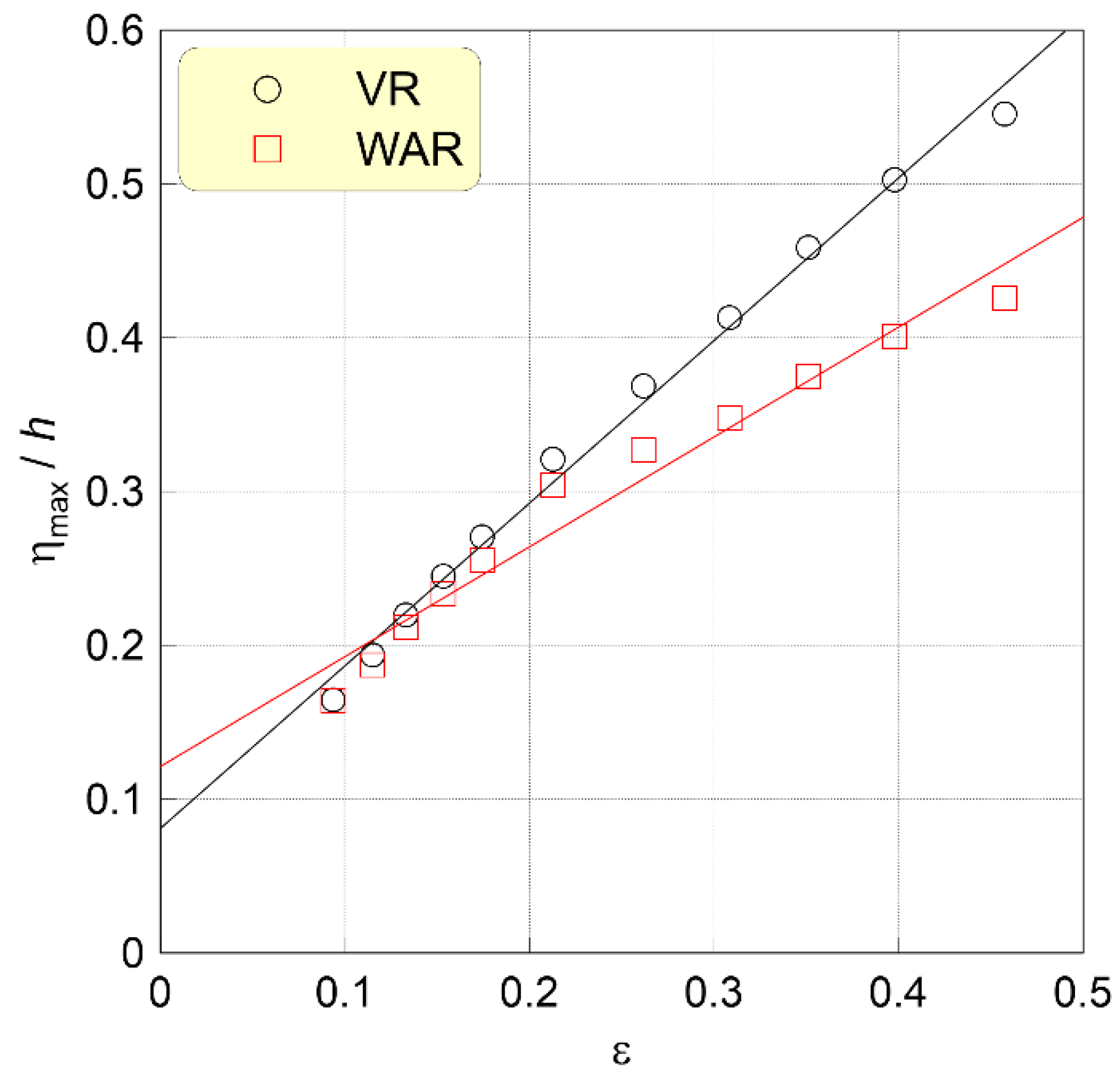
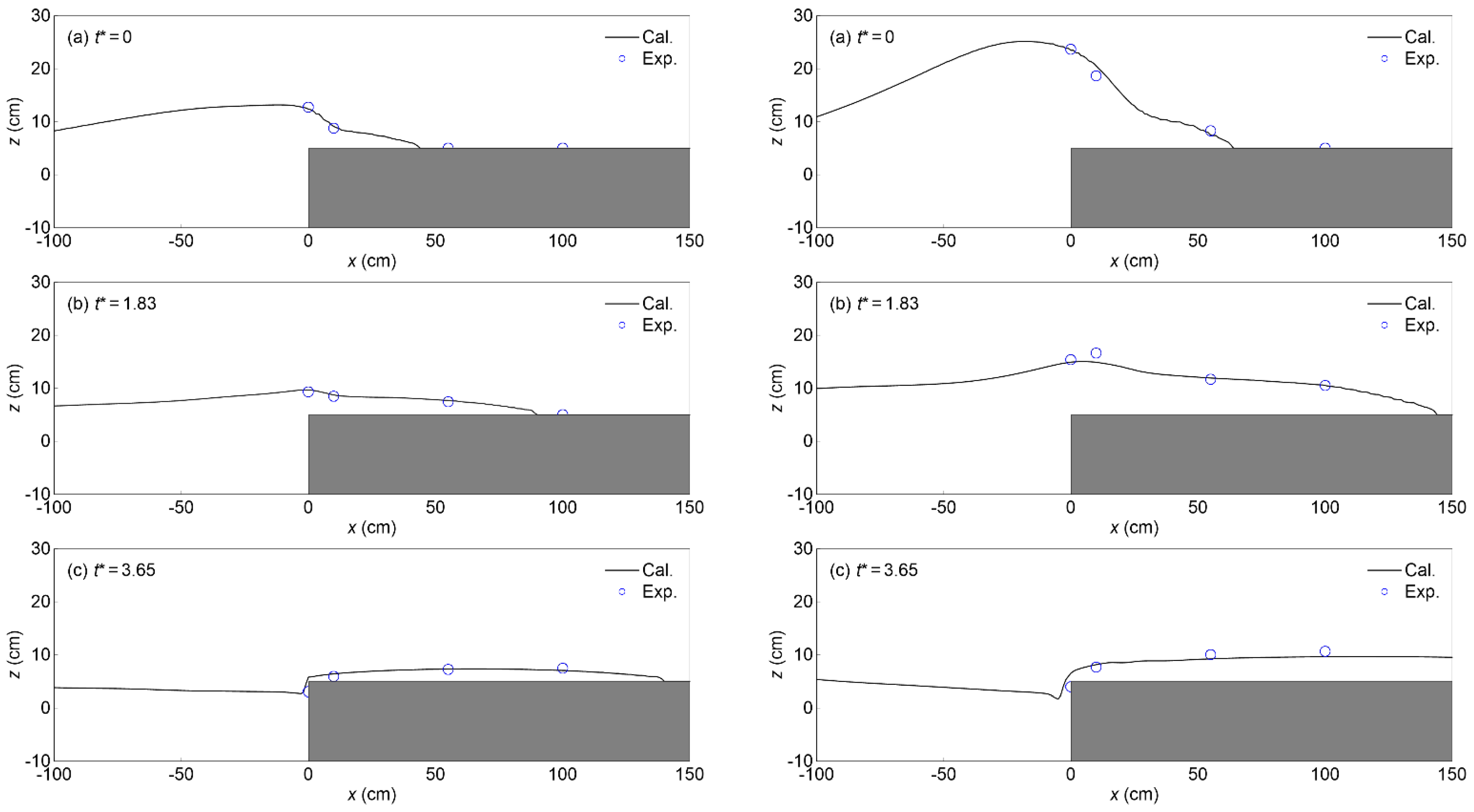
In
Figure 7a, the inundation height is larger at the WAR when
for the solitary wave, whereas it is larger at the VR when
at WG3 (
). This is because, as shown in
Figure 14, the vertical velocity of the solitary wave developed along the vertical wall of the VR increases the water surface elevation, and a rapid drop in the water surface elevation occurs as the horizontal velocity is converted at the revetment crest. Conversely, at the WAR, where the horizontal velocity is dominant during the overtopping, the drop in water surface elevation at the revetment crest is not large. Because the flow separation near the revetment edge increases the drag in this process, the sharp drop in the water surface elevation is delayed (see
Figure 15 and
Figure 21). Hence, as
decreases, the flow separation weakens, and the inundation height at the WAR becomes larger than that at the VR; as
increases, the flow separation strengthens, and the separation region expands, which causes the inundation height at the VR to increase.
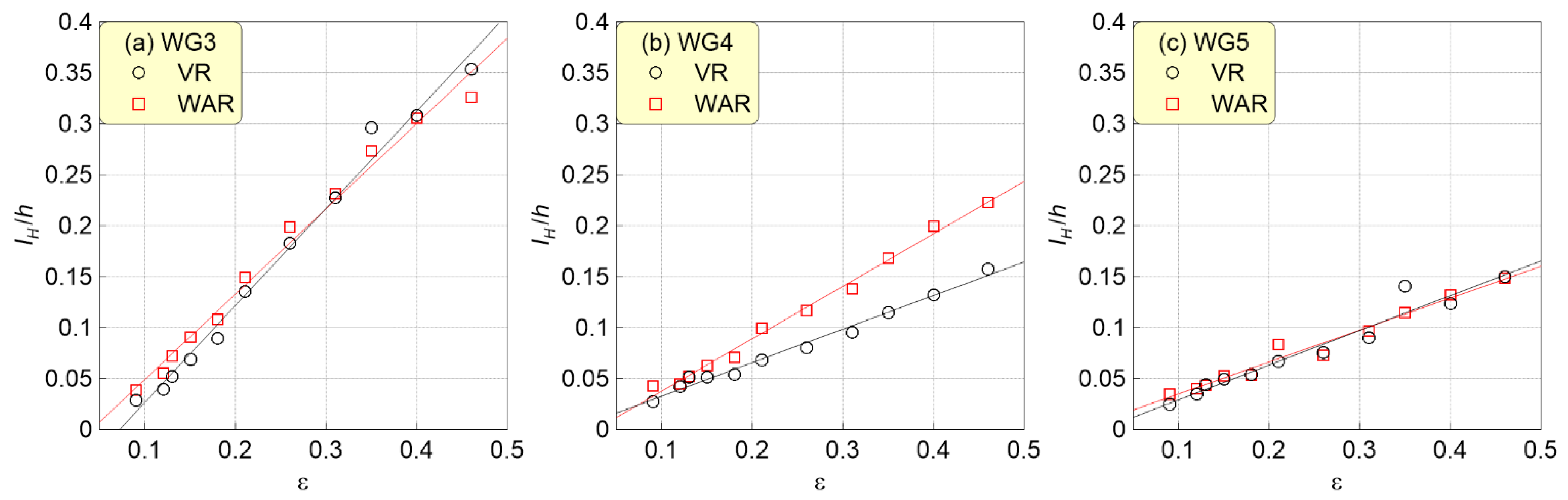
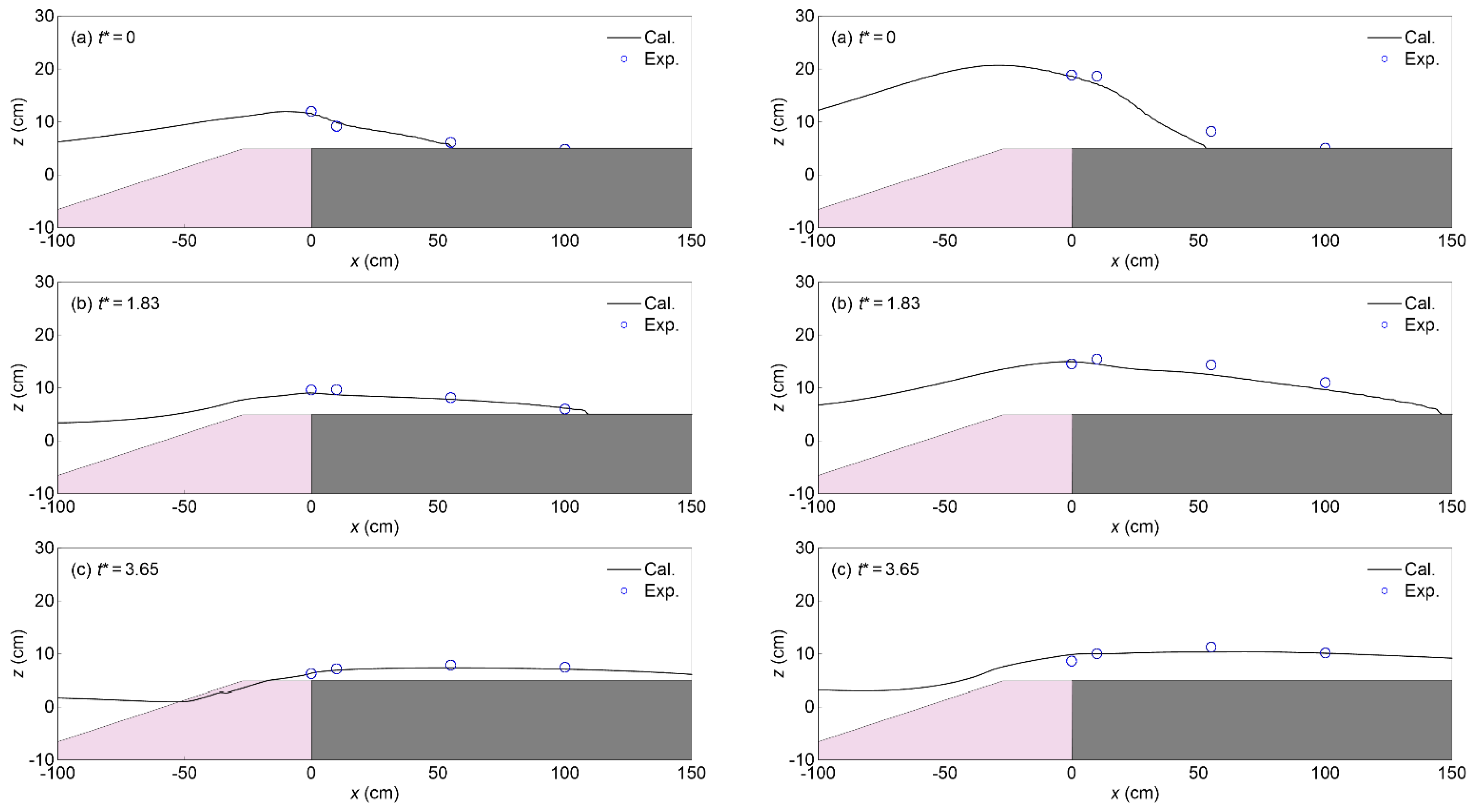
The maximum inundation height at WG4 (
) increases to a greater extent at the WAR with an increase in
(see
Figure 14b). As evidenced in
Figure 15 and
Figure 21, because the point
at the VR is outside the flow separation region, as the drag resistance disappears, the flow velocity increases, and the water surface elevation drops sharply. Hence, in the numerical analysis results of
Figure 23 and in the physical modeling test, as
increases at the point
, the inundation height at the WAR increases to a greater extent than at the VR.
As shown in
Figure 14c, the difference in inundation height between the VR and WAR at WG5 (
) is not large. A comparison of
Figure 15 and
Figure 16 shows that the solitary wave field and flow field near the shore, which exhibit complex flow phenomena, greatly differ between the VR and WAR. However, as the solitary wave propagates inland, its flow stabilizes, and as the water surface elevation drops, the difference in inundation height between the VR and WAR becomes small.
7. Conclusions
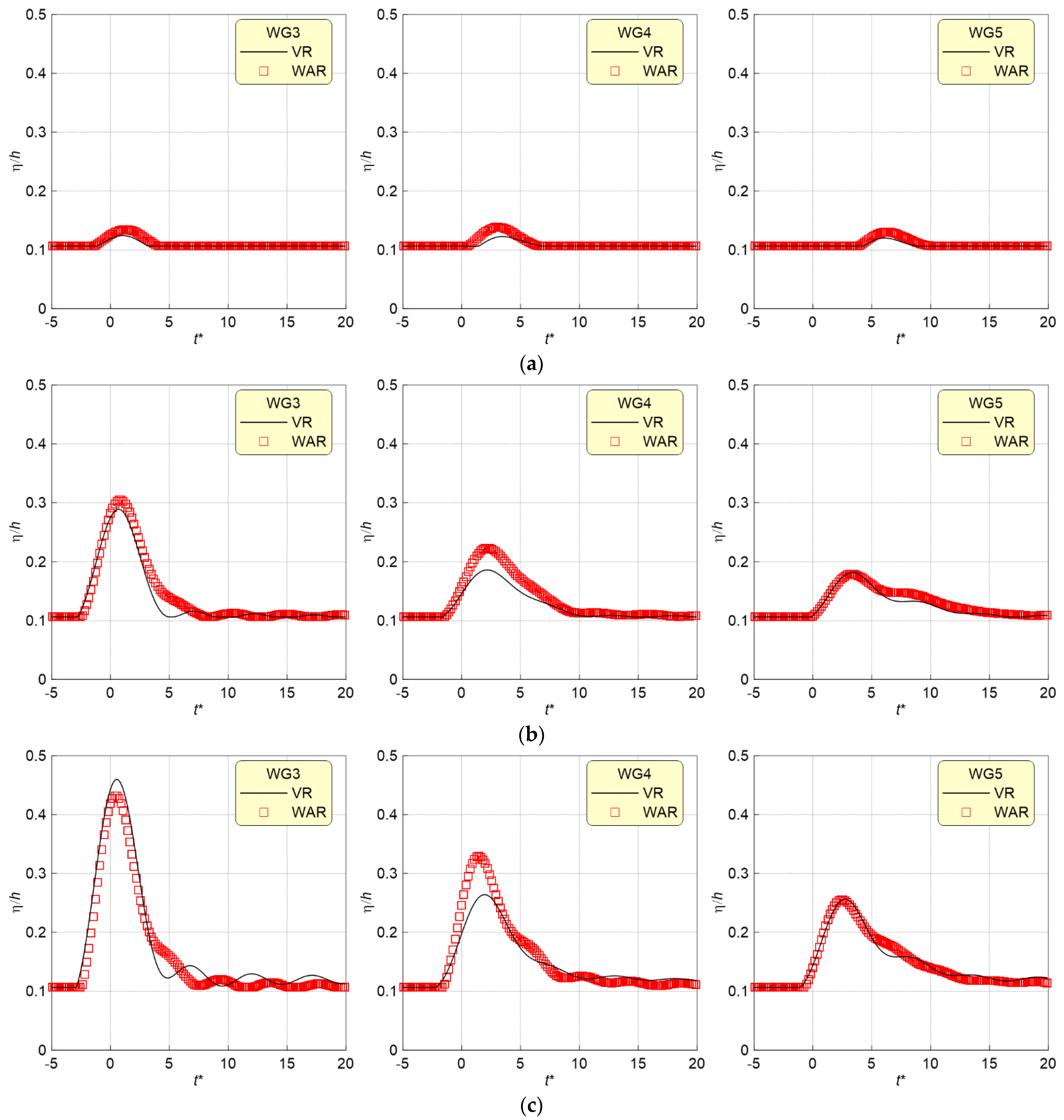
This study conducted a physical modeling test and numerical analysis to investigate the phenomena of wave overtopping and inundation according to the revetment type for solitary waves. In the physical modeling test, we constructed a VR and WAR and measured the water surface elevations during the overtopping and inundation process of the solitary wave. In the numerical analysis, we constructed the same revetments in an NWT as in the experiment and analyzed the wave fields, flow fields, and vortex fields in the solitary wave overtopping and inundation process.
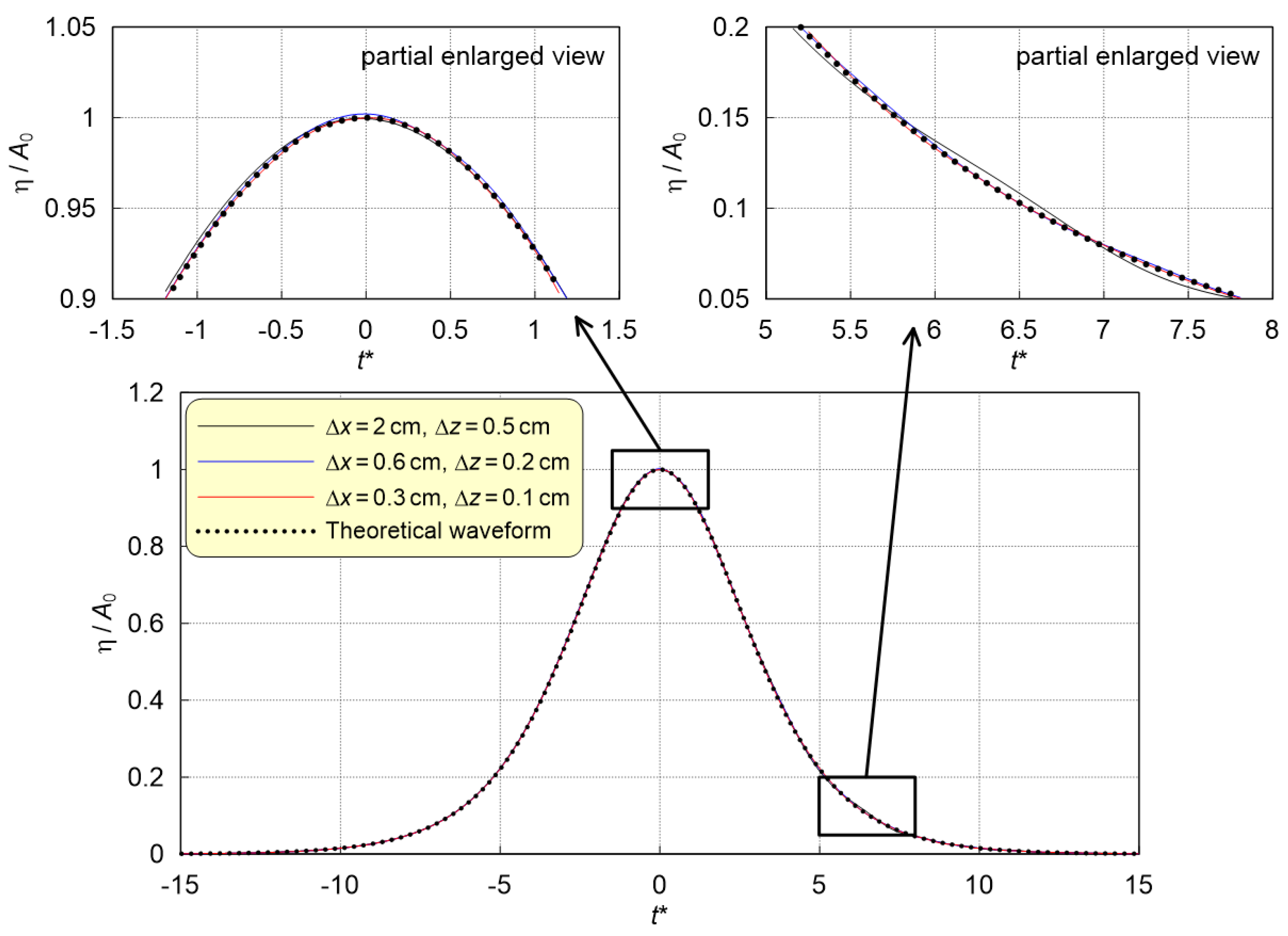
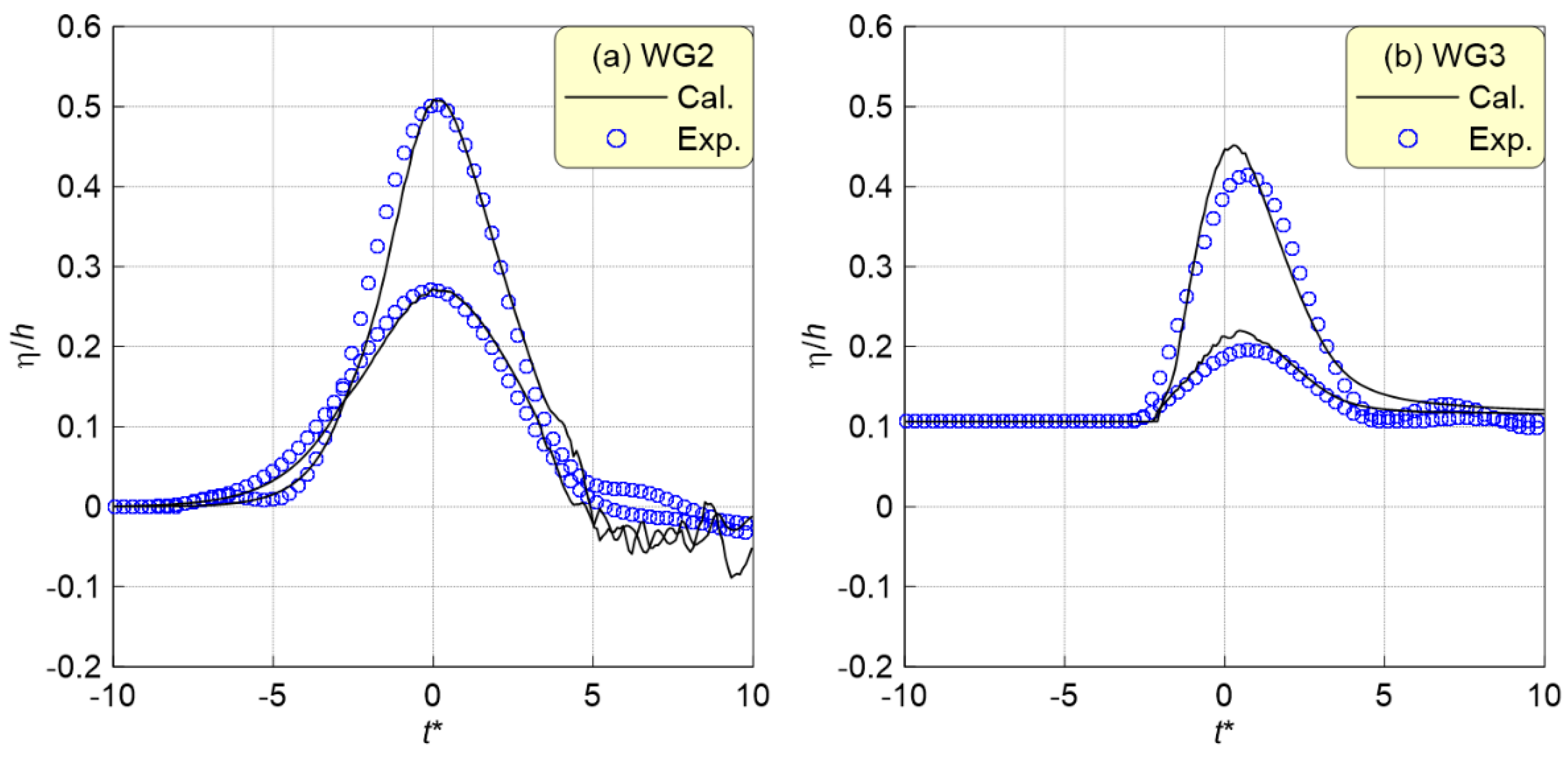
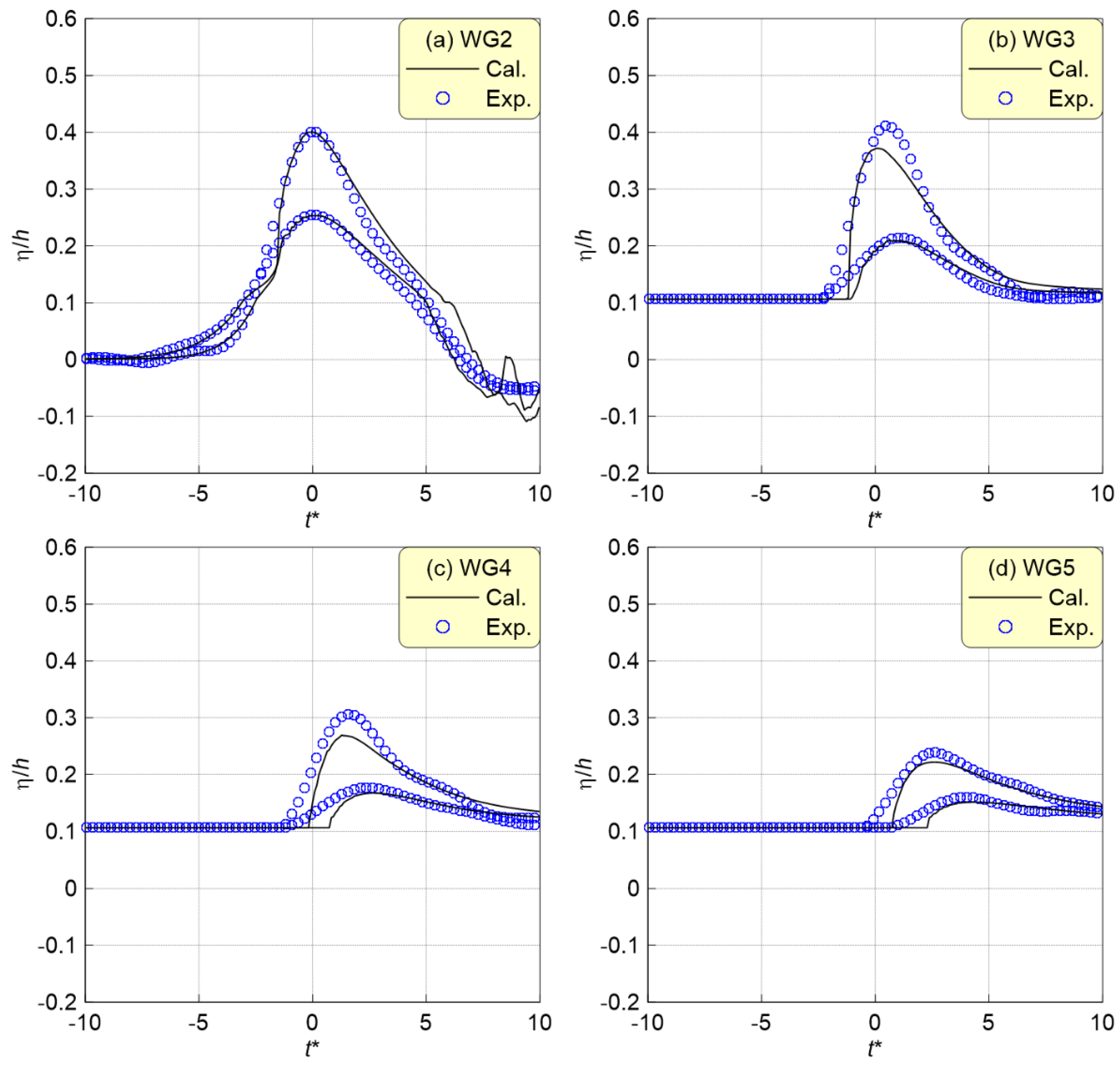
In the physical modeling test, the maximum water level at the front of the revetment showed similar results for the VR and WAR under the condition of small wave height (Run-1) when a solitary wave overtopped. However, as the height of the wave increased, the maximum water level was larger at the VR than at WAR, and the difference in maximum water level tended to increase. In contrast with the results at the front of the revetment, a reversal occurred, in which the maximum inundation height increased at the WAR than at VR as the wave propagated inland. To confirm the validity and effectiveness of the NWT wave generation method, we compared and reviewed the approximate waveform of the solitary wave and flow velocity. In addition, the time waveforms and spatial waveforms calculated in the NWT accurately reproduced the water surface elevations measured by the WGs in the experimental tank. As the flow velocity of the solitary wave cannot bend at right angles at the VR, flow separation occurred at the revetment crest, and a separation region was formed. Conversely, at the WAR, the flow cross-sectional area gradually decreased along the slope of the wave absorber, leading to typical open channel flow characteristics in which the horizontal velocity was dominant during overtopping and inundation. At the WAR where flow separation did not occur, strong vorticity developed only in the boundary layer owing to floor friction. However, at the VR where flow separation occurred, strong vorticity and separated flows occurred inside and at the boundary of the separation region. Owing to the increase in drag, generation of vorticity, and energy damping due to flow separation at the VR crest, as well as the development of horizontal velocity on the slope of the inclined wave absorber at the WAR, the inundation distance was longer at the WAR than at the VR. As ε increased, the inundation distance of the solitary wave increased; the difference in inundation distance between the VR and WAR also tended to increase. The difference in the average inundation distance of the solitary waves was 86.69 cm, and inundation progressed by an average of 15% further inland in the case of the WAR than the VR.
WAR structures are known to reduce damage from overtopping and inundation caused by periodic waves more effectively than VR. However, this study on solitary waves yielded experimental and numerical results that were contrary to general knowledge. It is judged that the analysis result of inundation characteristics according to the revetment type can be used for responding to secondary damage such as inundation and collision caused by tsunamis. In addition, it can be concluded that sufficient distance and slope for energy dissipation are necessary when sloped revetment is applied to reduce wave overtopping and inundation for long period waves such as solitary waves.
This study analyzed wave overtopping and inundation characteristics according to the type of structure and was limited to solitary waves. However, analyzing the hydraulic phenomena of the tsunami is difficult, as the actual tsunami is wider than the solitary waveform. Tsunami-like waves [
13] and N-solitary waves [
53,
54,
55,
56], which have hydraulic phenomena similar to tsunamis, are being actively researched. To improve the reliability of this research, we plan to conduct physical modeling tests and numerical analyses in the future by applying WARs of various structural types to solitary waves or tsunami-like waves.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




























