
Identification of High-Impact Uncertainty Sources for Urban Flood Models in Hillside Peri-Urban Catchments




Abstract
:1. Introduction
2. Materials and Methods
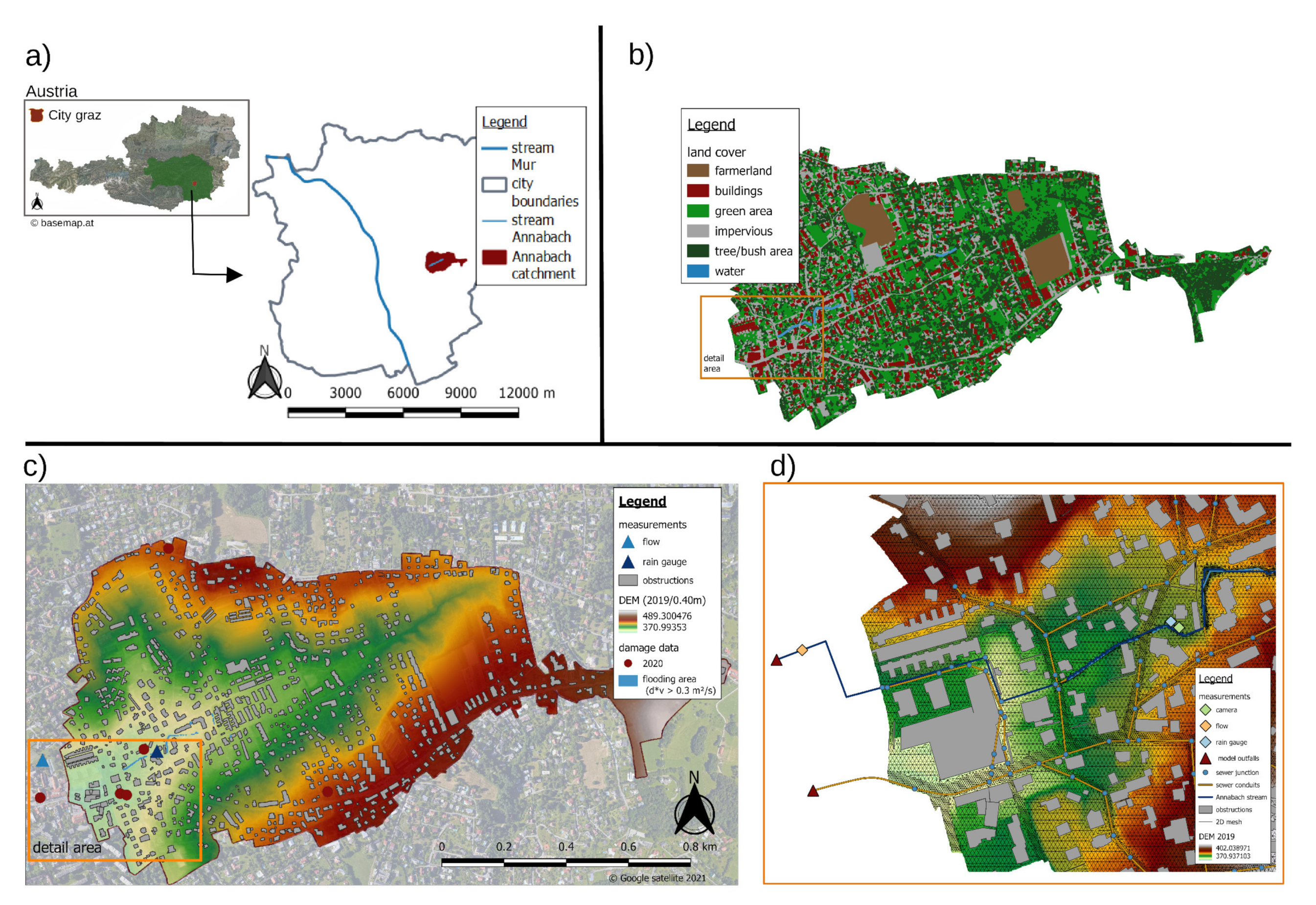
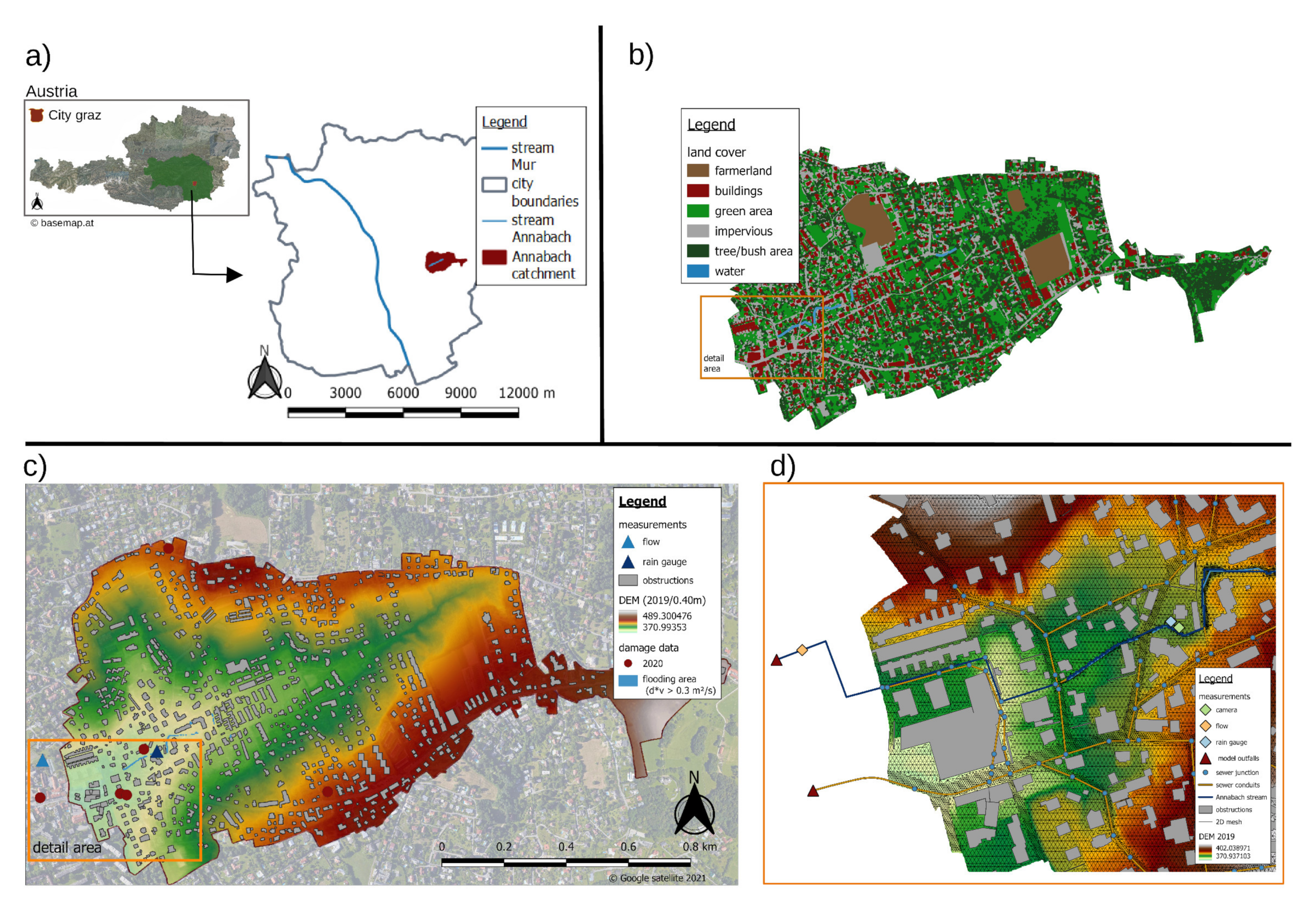
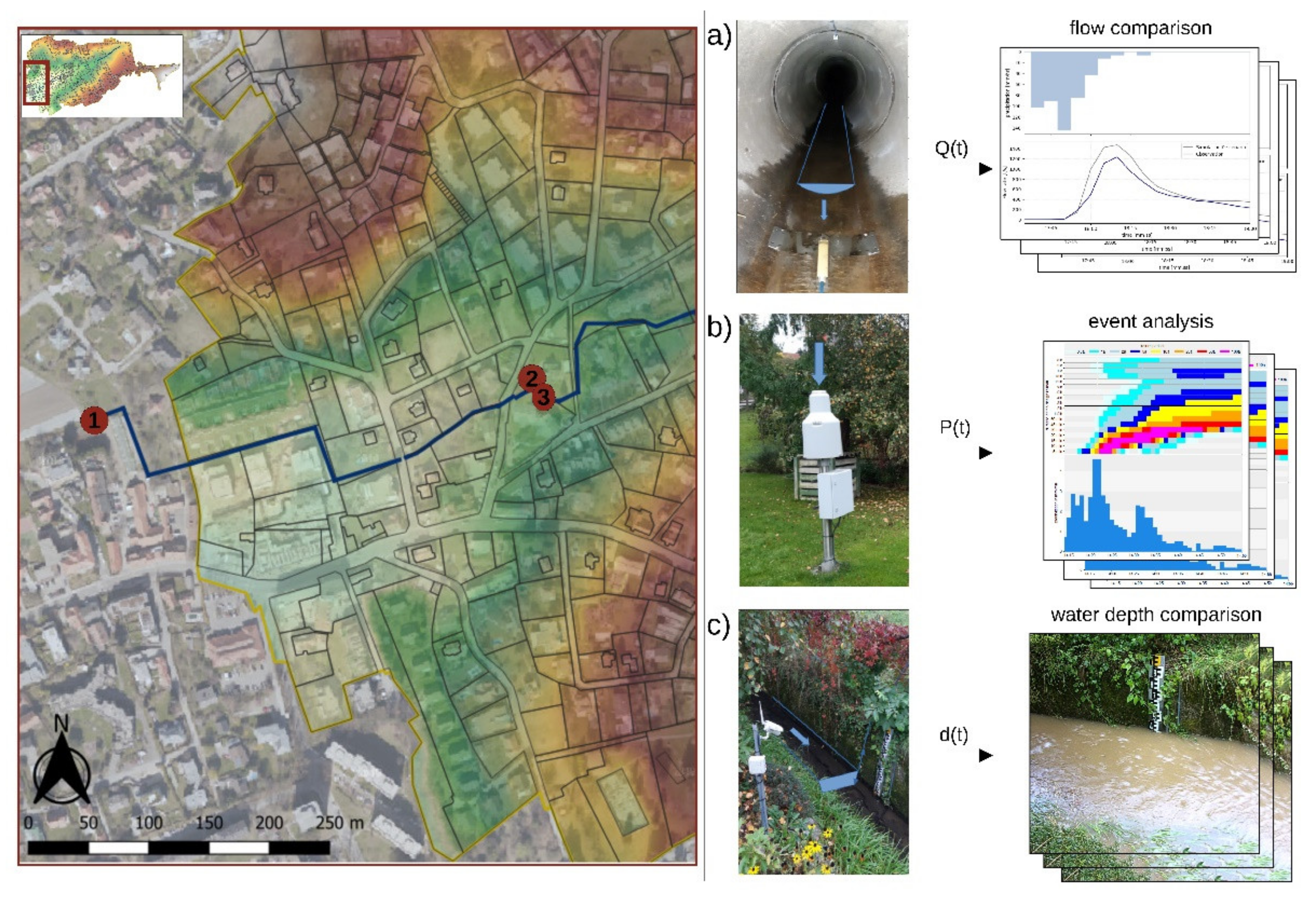
2.1. Study Site Annabach
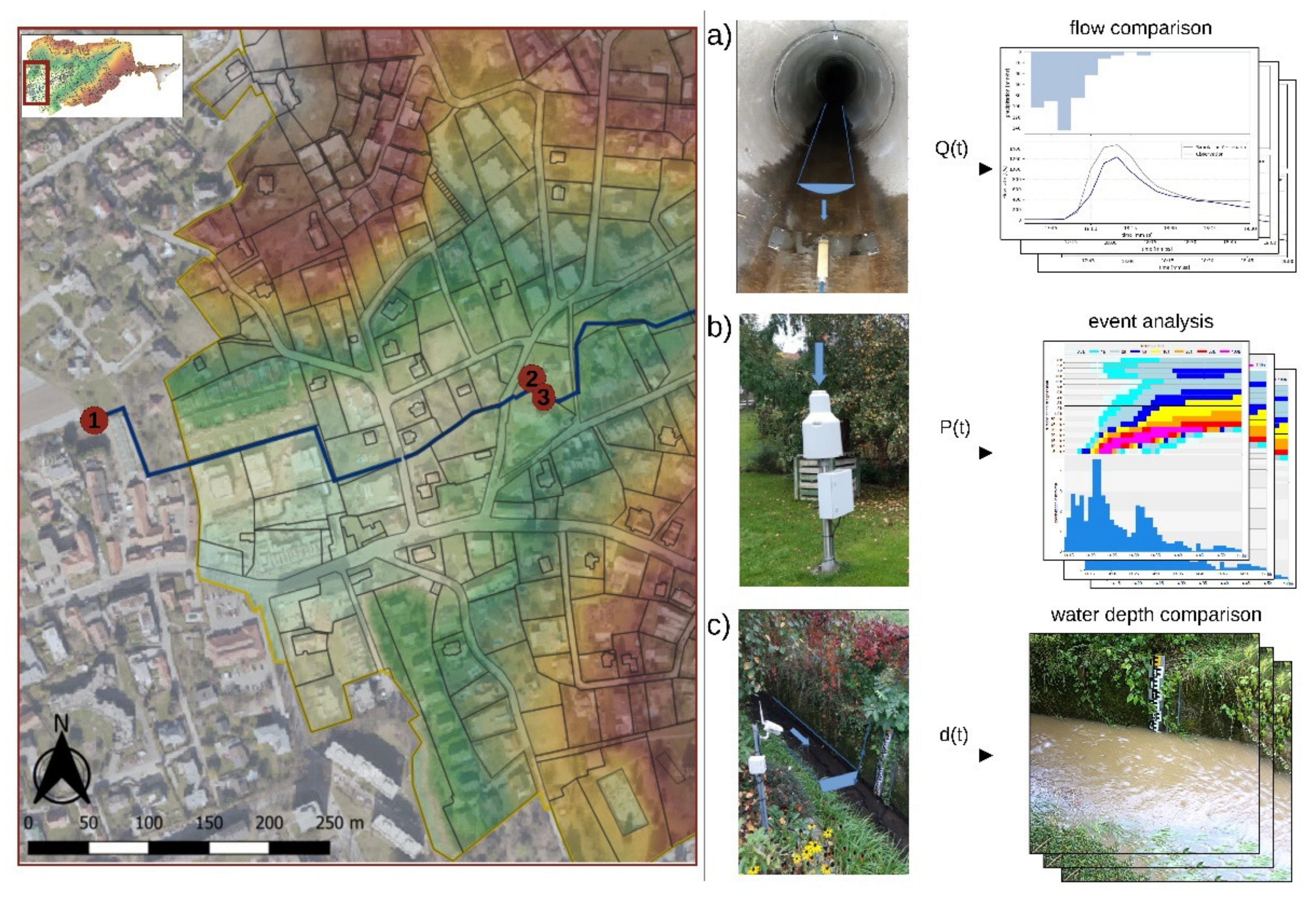
2.2. Data Requirements
- Input data (e.g., rainfall data, terrain data, obstruction data);
- Modeling data (e.g., land cover data to define the model parameters);
- Calibration and validation data (e.g., streamflow measurement data, flood damage data, interviews, social media data)
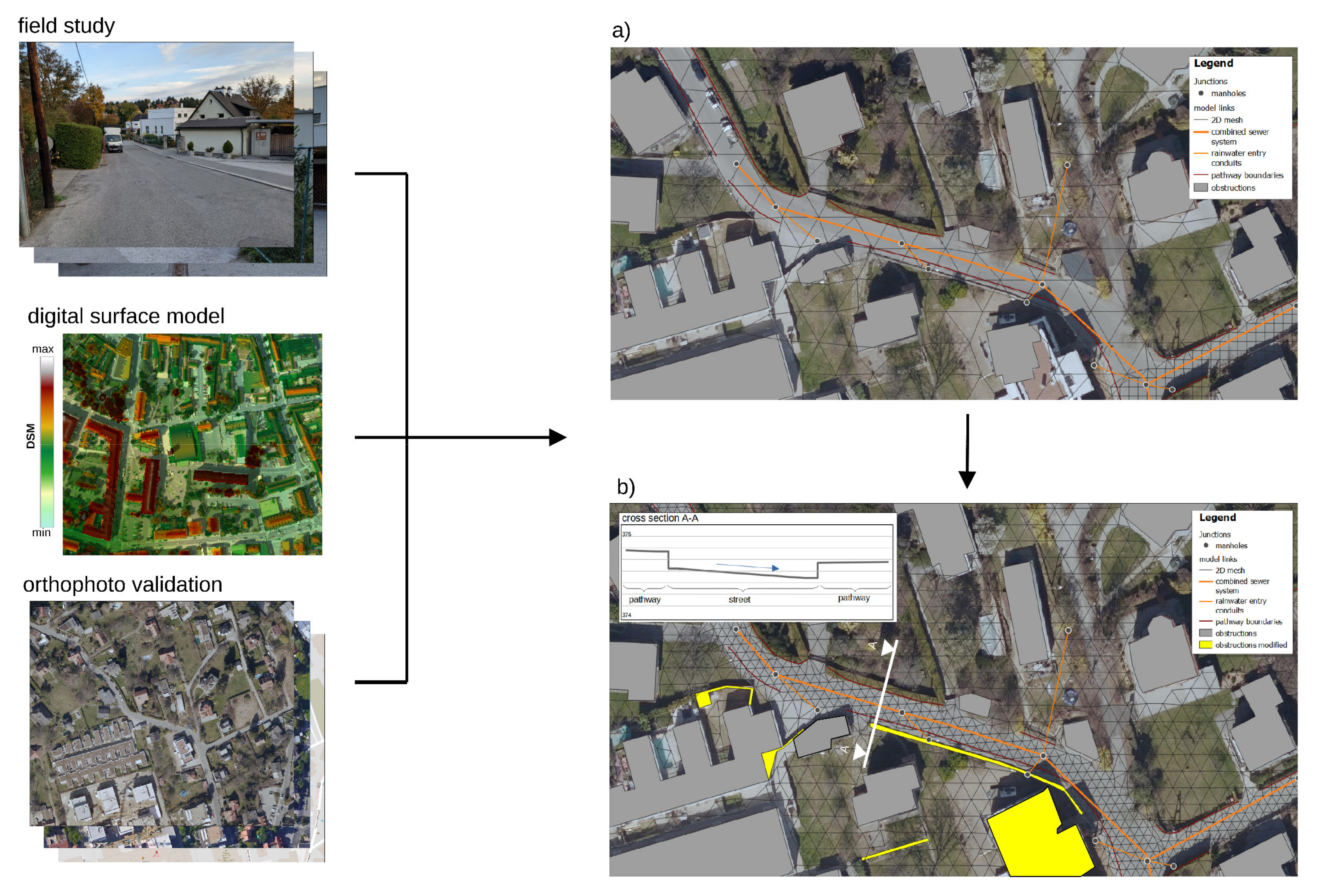
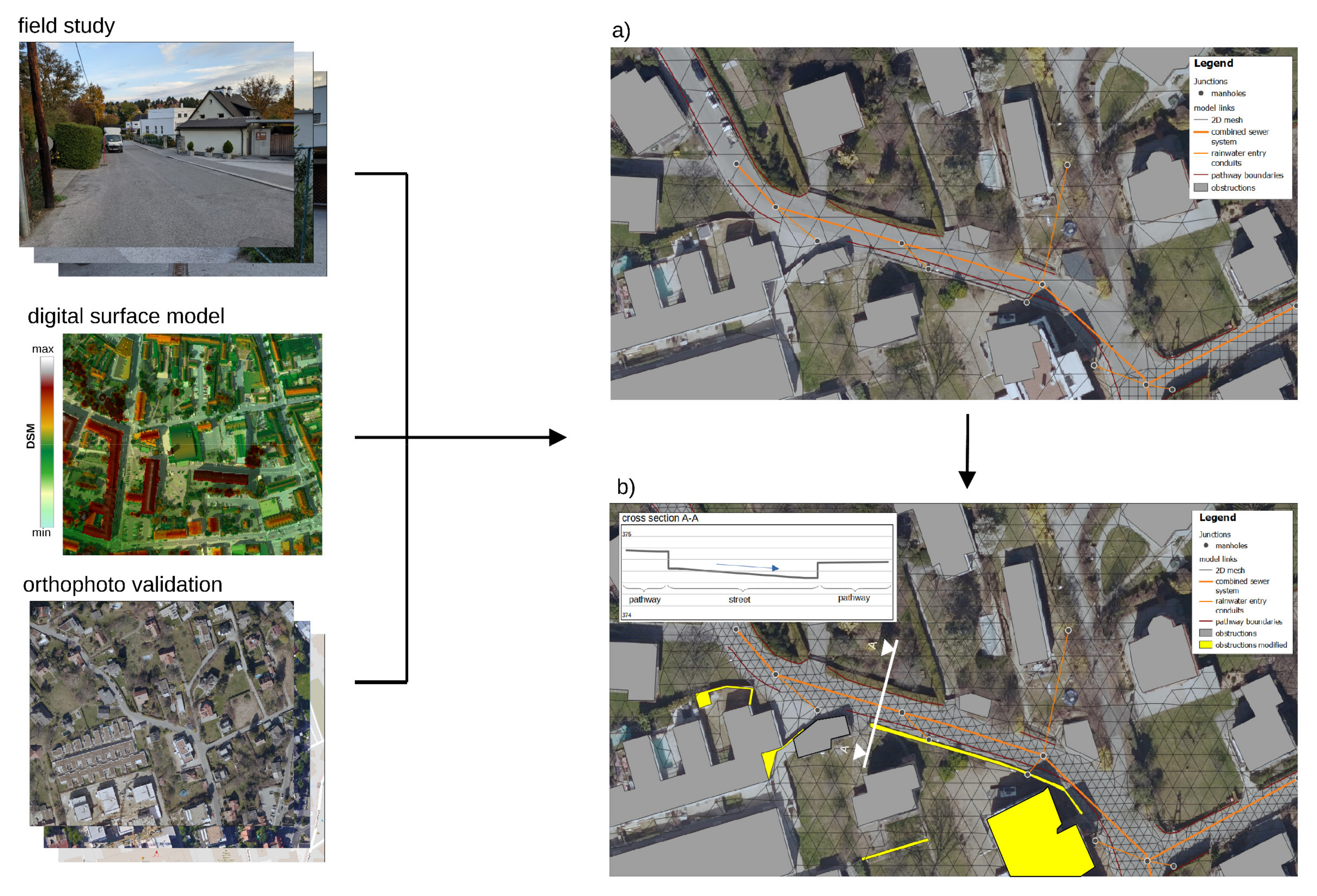
2.3. Uncertainty Source: Input Data
- All micro-obstructions of the private and the public ground that obstruct flows (e.g., walls and fences);
- Validation of buildings with changes in geometry and implement new buildings that are not included in the old data source (e.g., land cover data);
- Take all pathway boundaries along the streets into account, including the gaps due to street entrances.
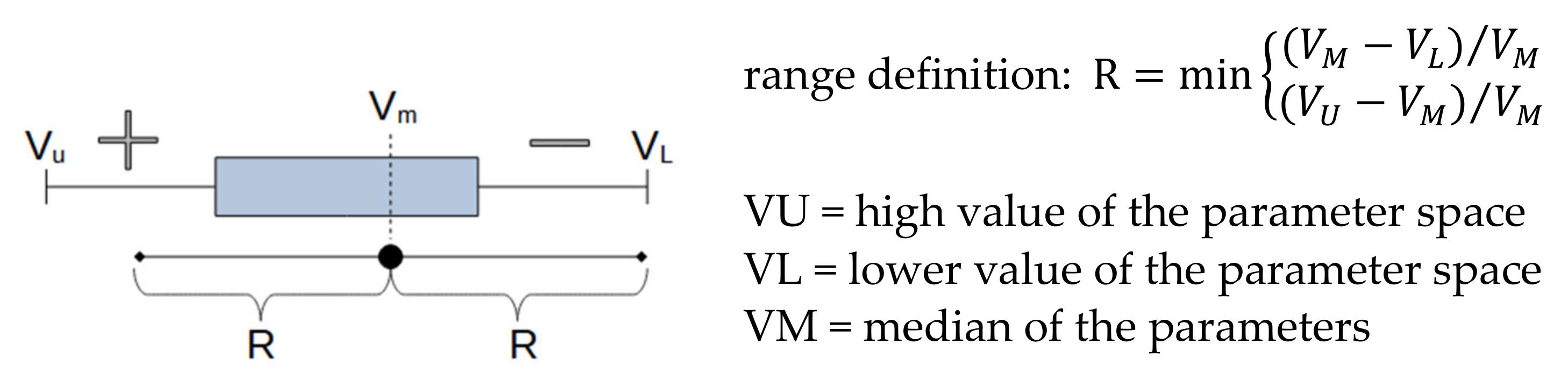
2.4. Uncertainty Source: Model Parameters
2.5. Uncertainty Source: Model Structure
2.5.1. D/2D Urban Flood Model
2.5.2. D Model
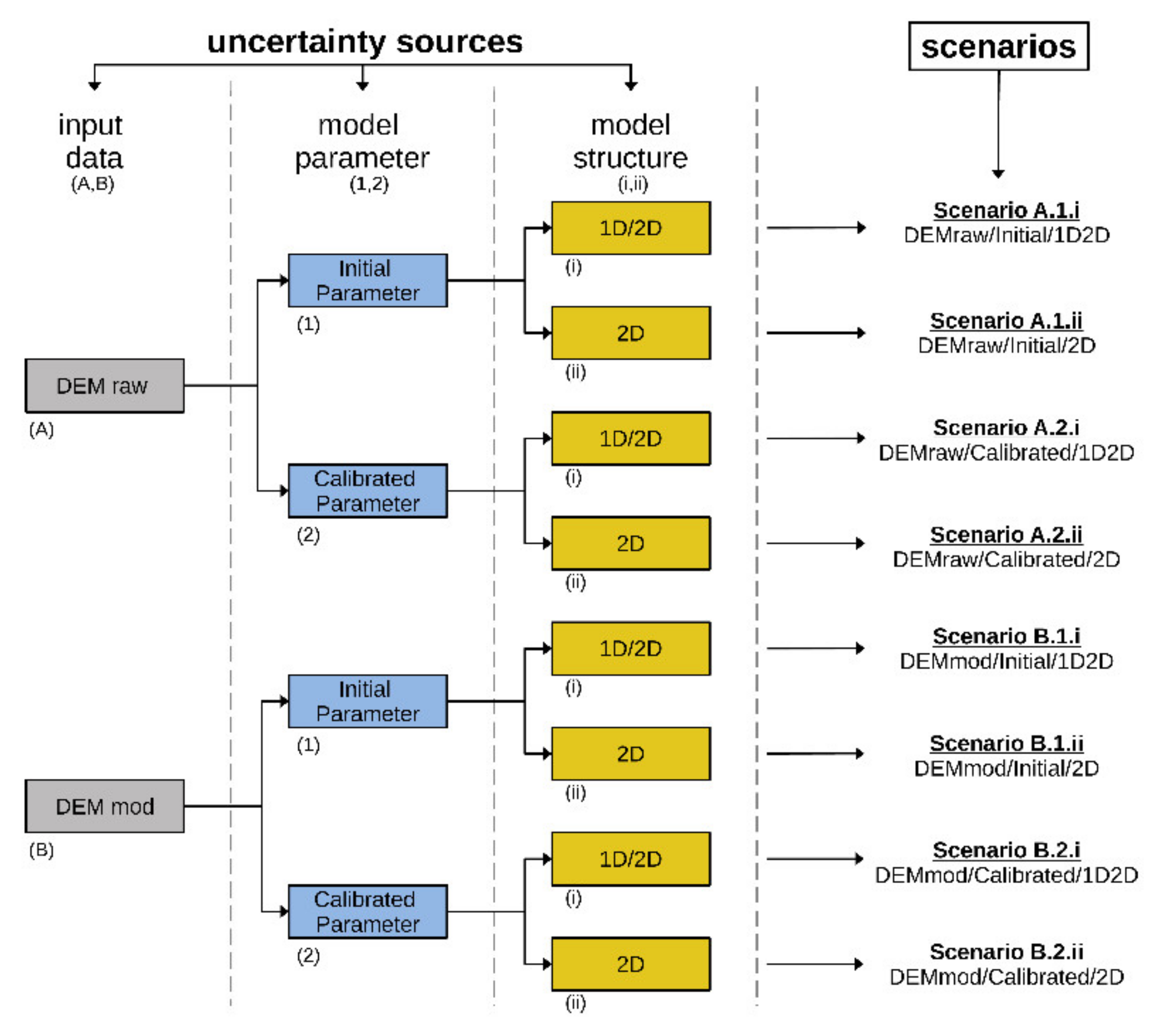
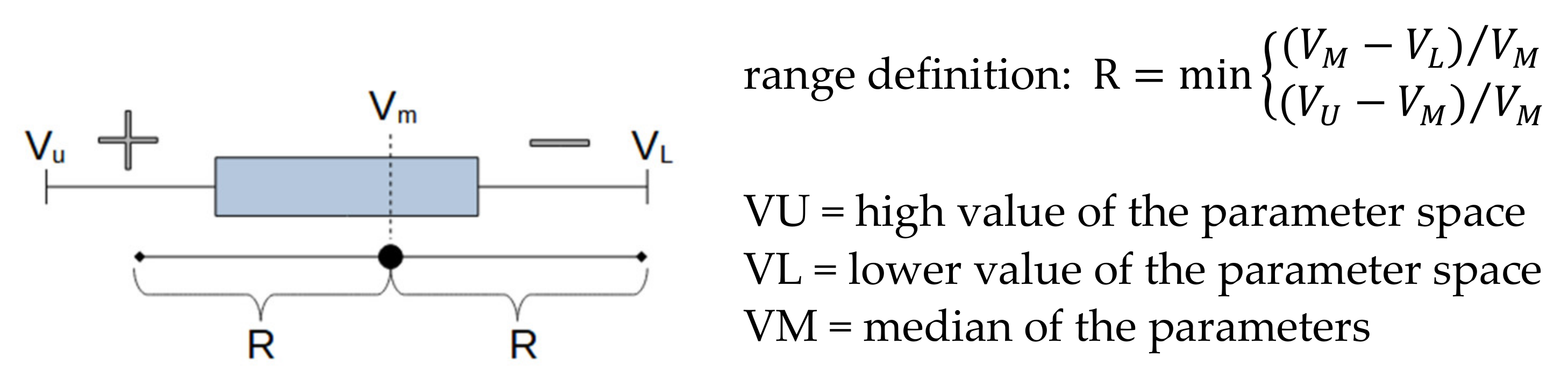
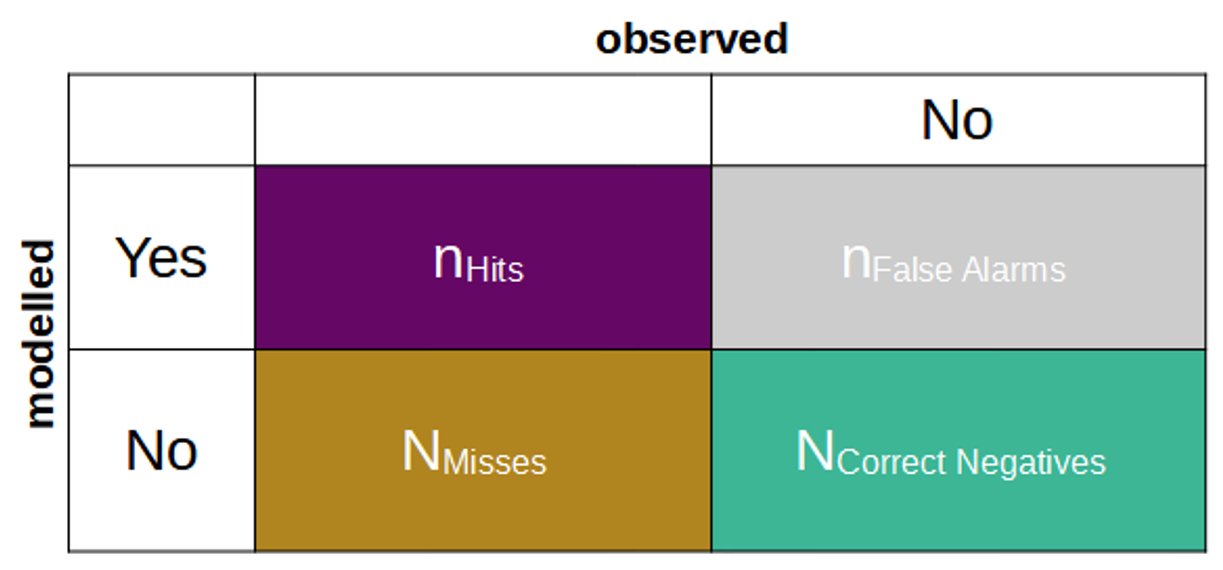
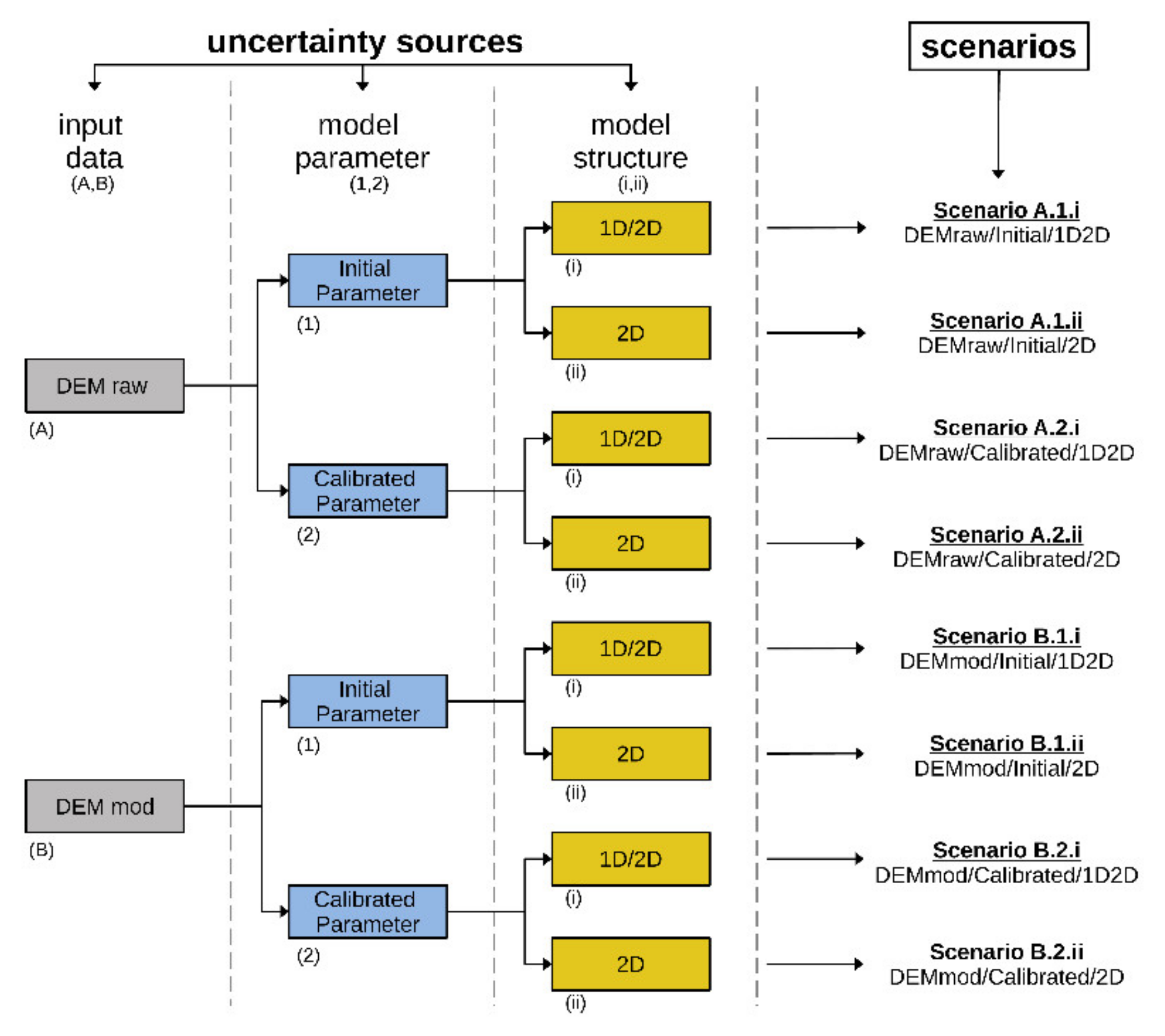
2.6. Identification of Uncertainty Source
- DEMraw and DEMmod (input data);
- Sensitive model parameters with literature values and calibrated values (parameters);
- 1D/2D model and 2D model (model structure).
3. Results & Discussion
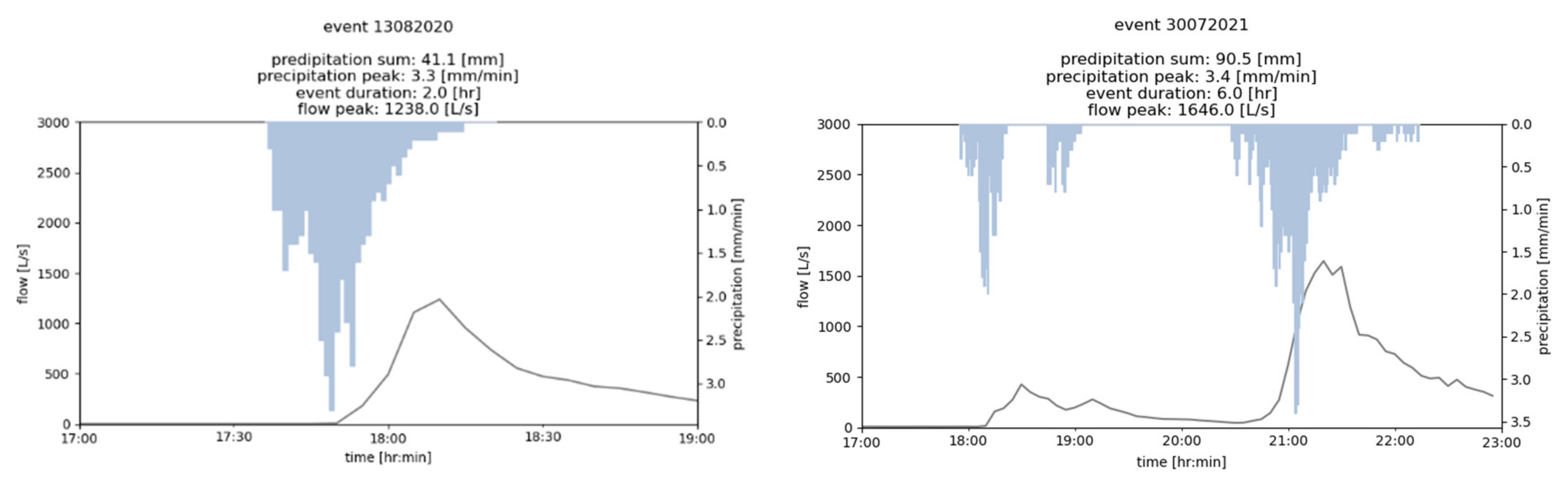
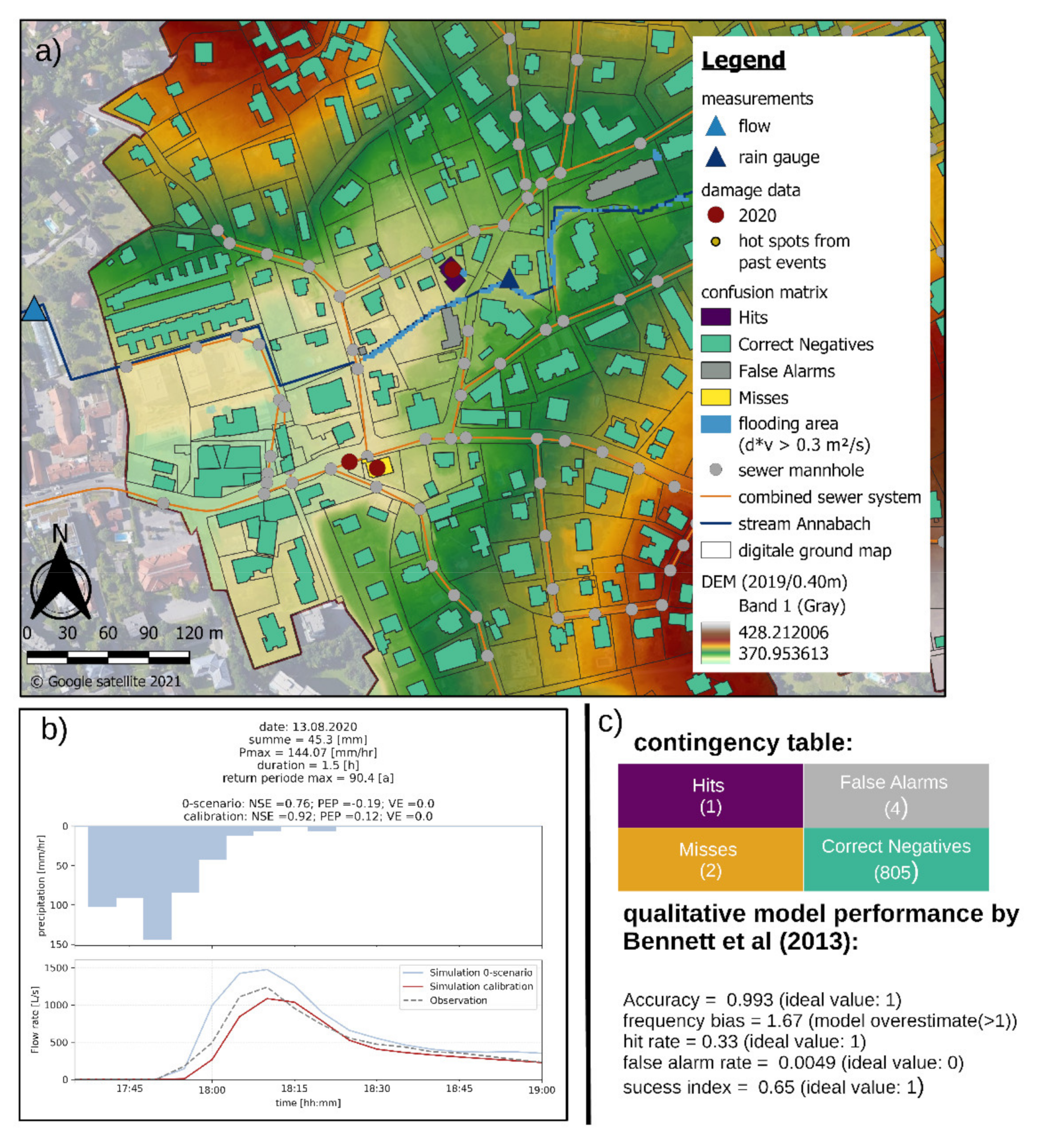
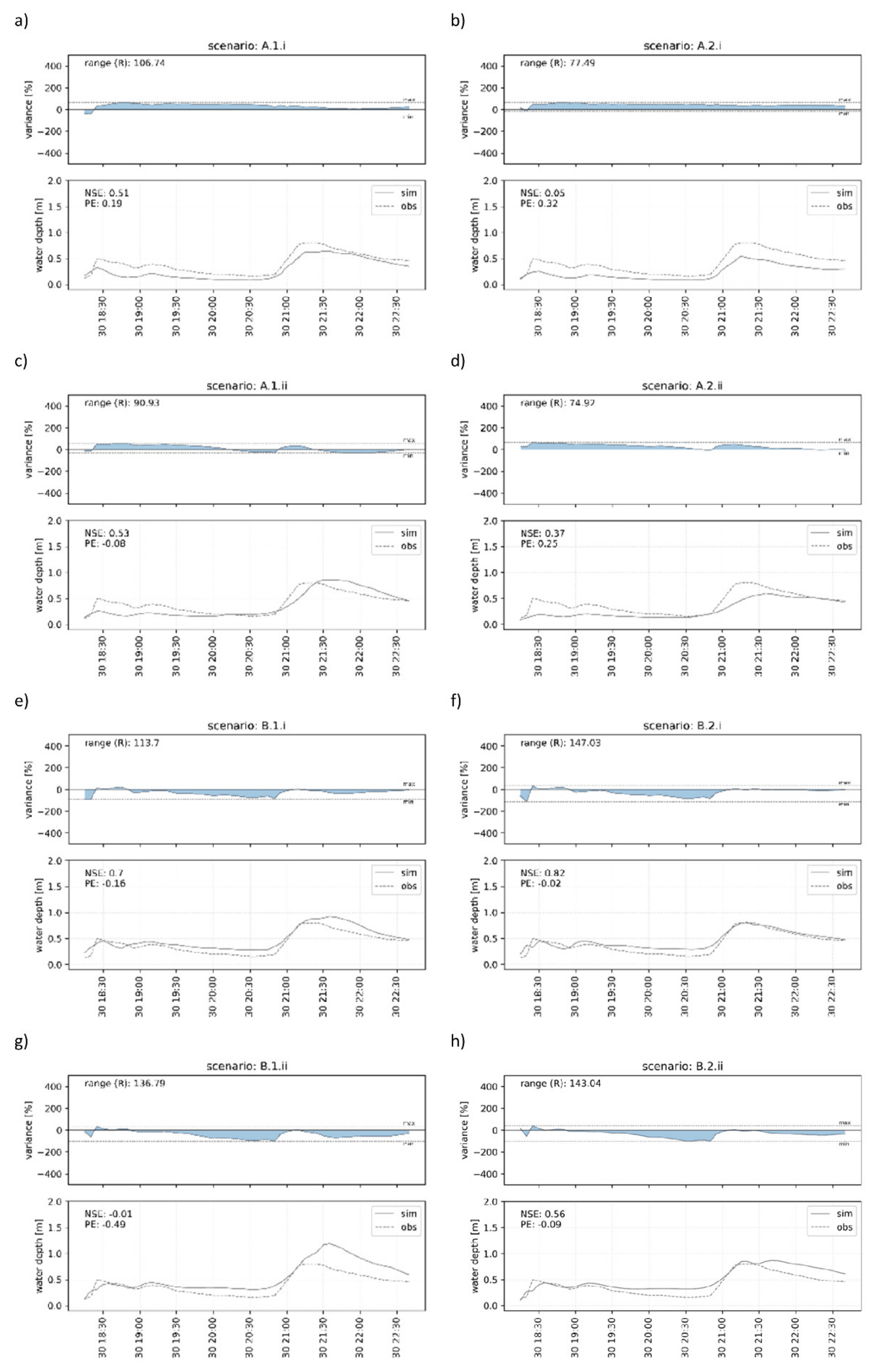
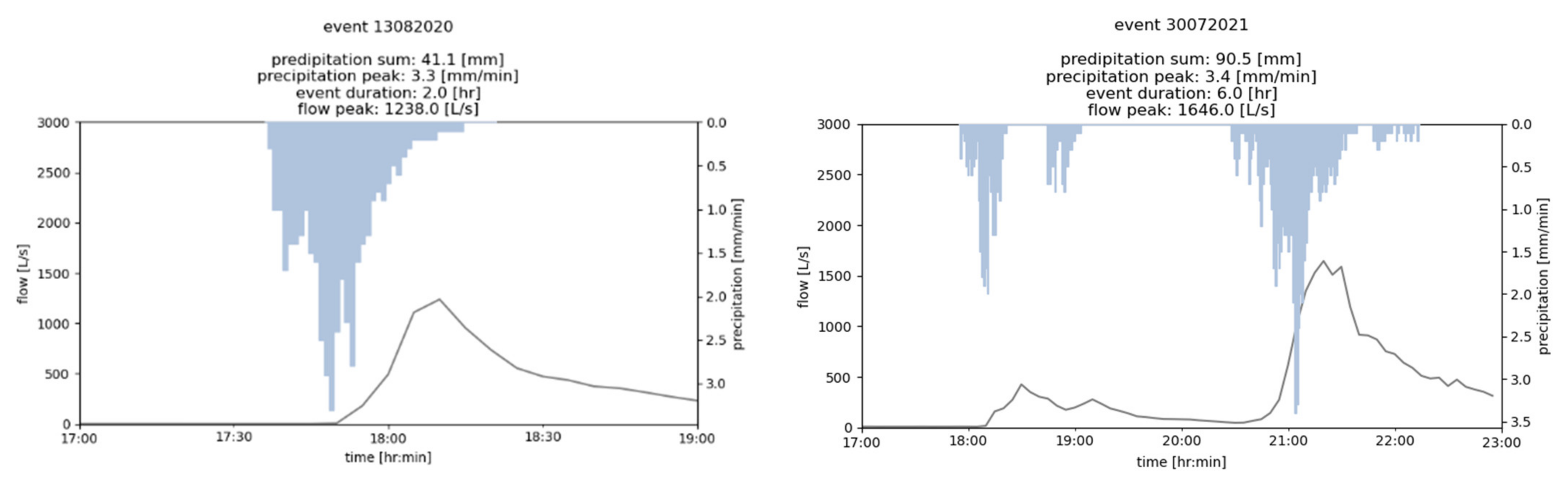
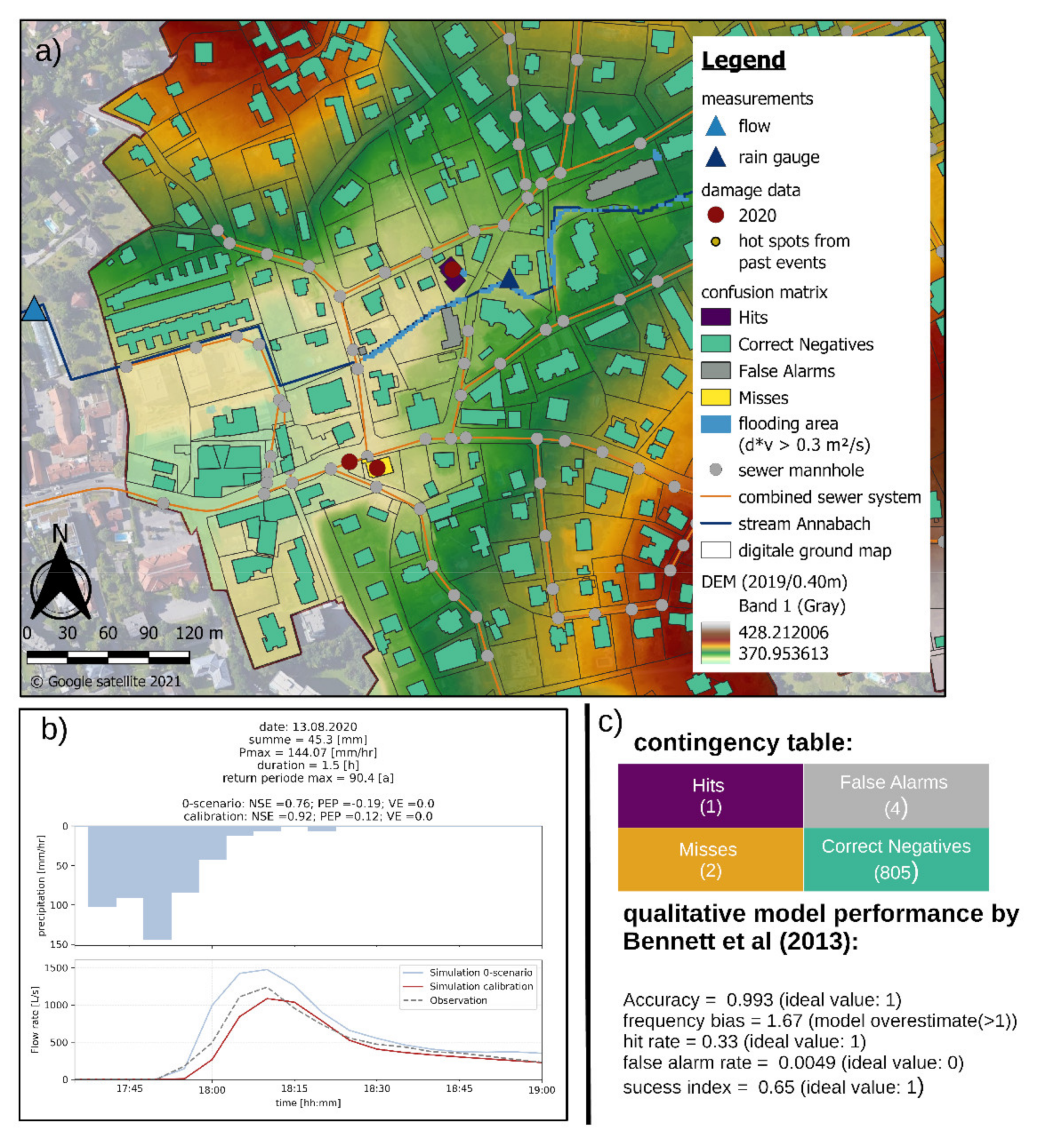
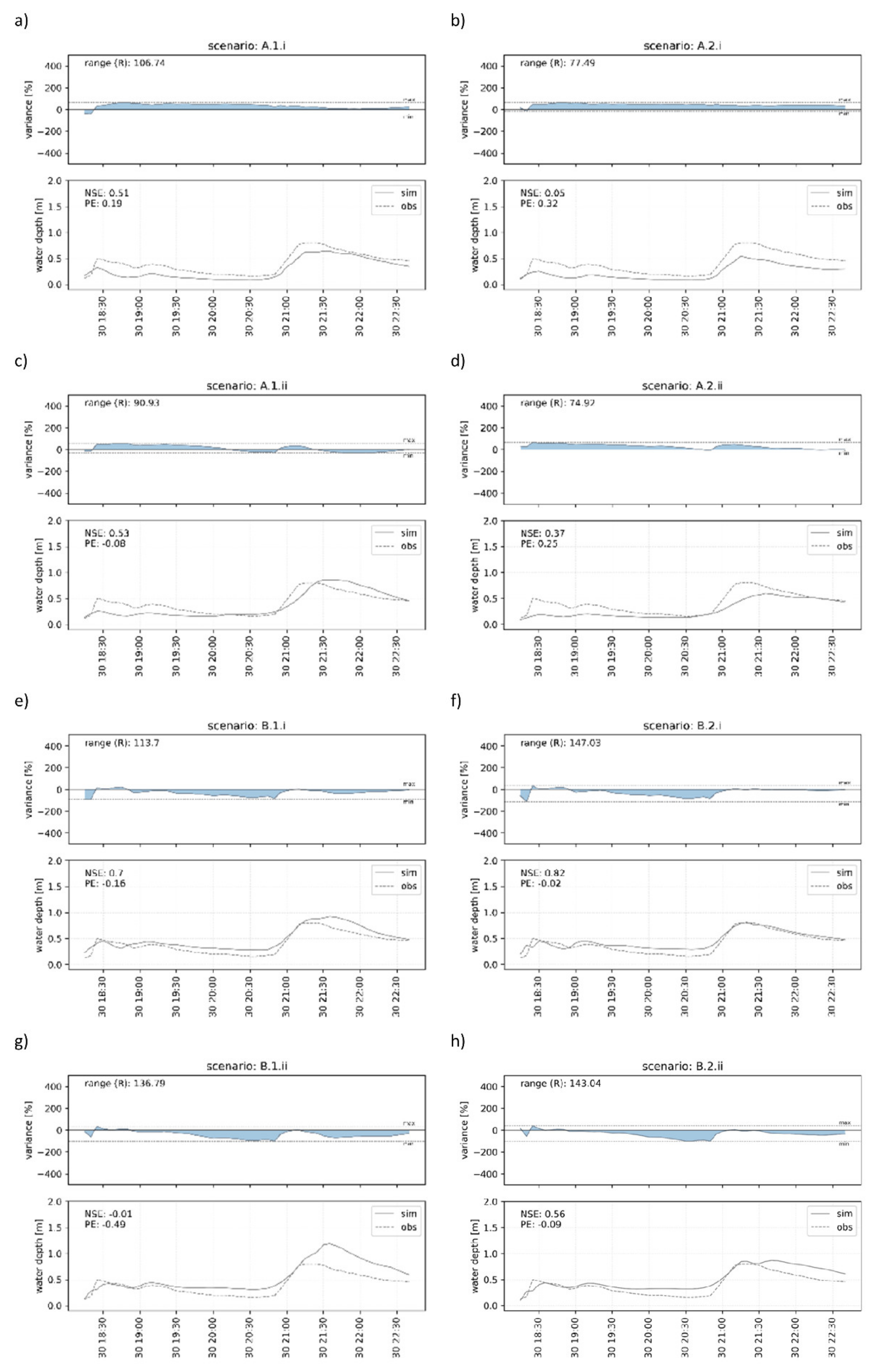
3.1. Model Calibration and Validation
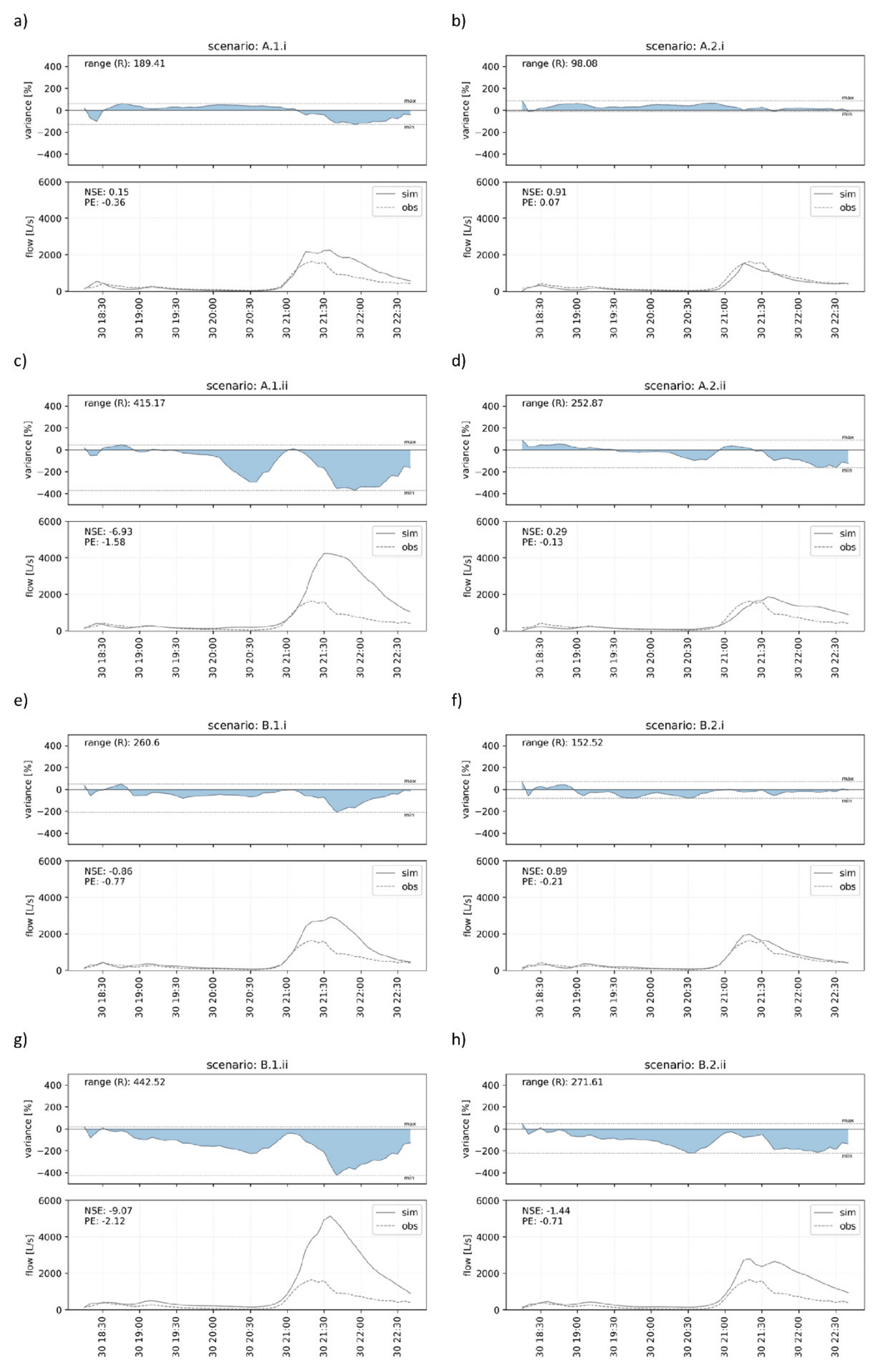
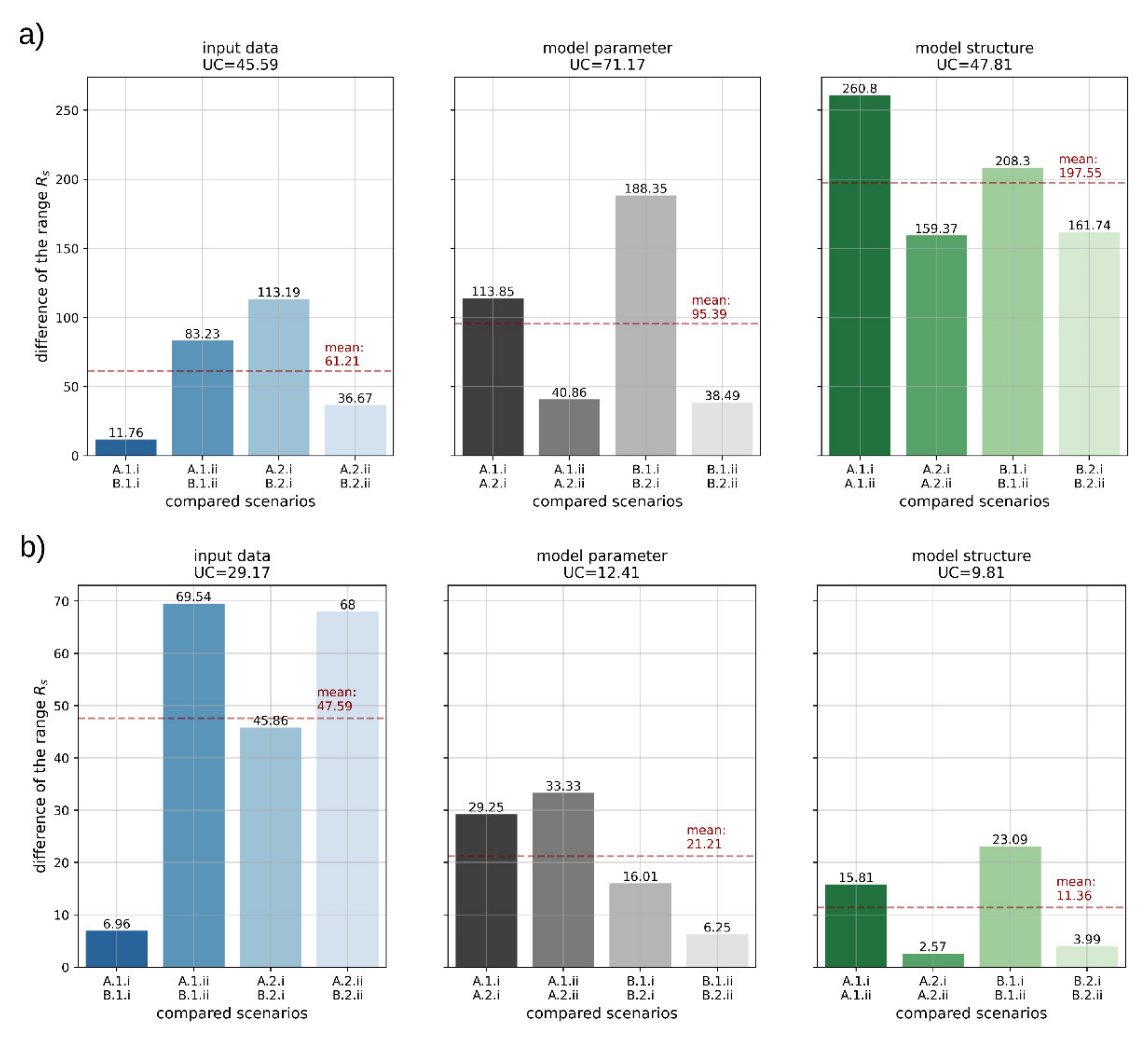
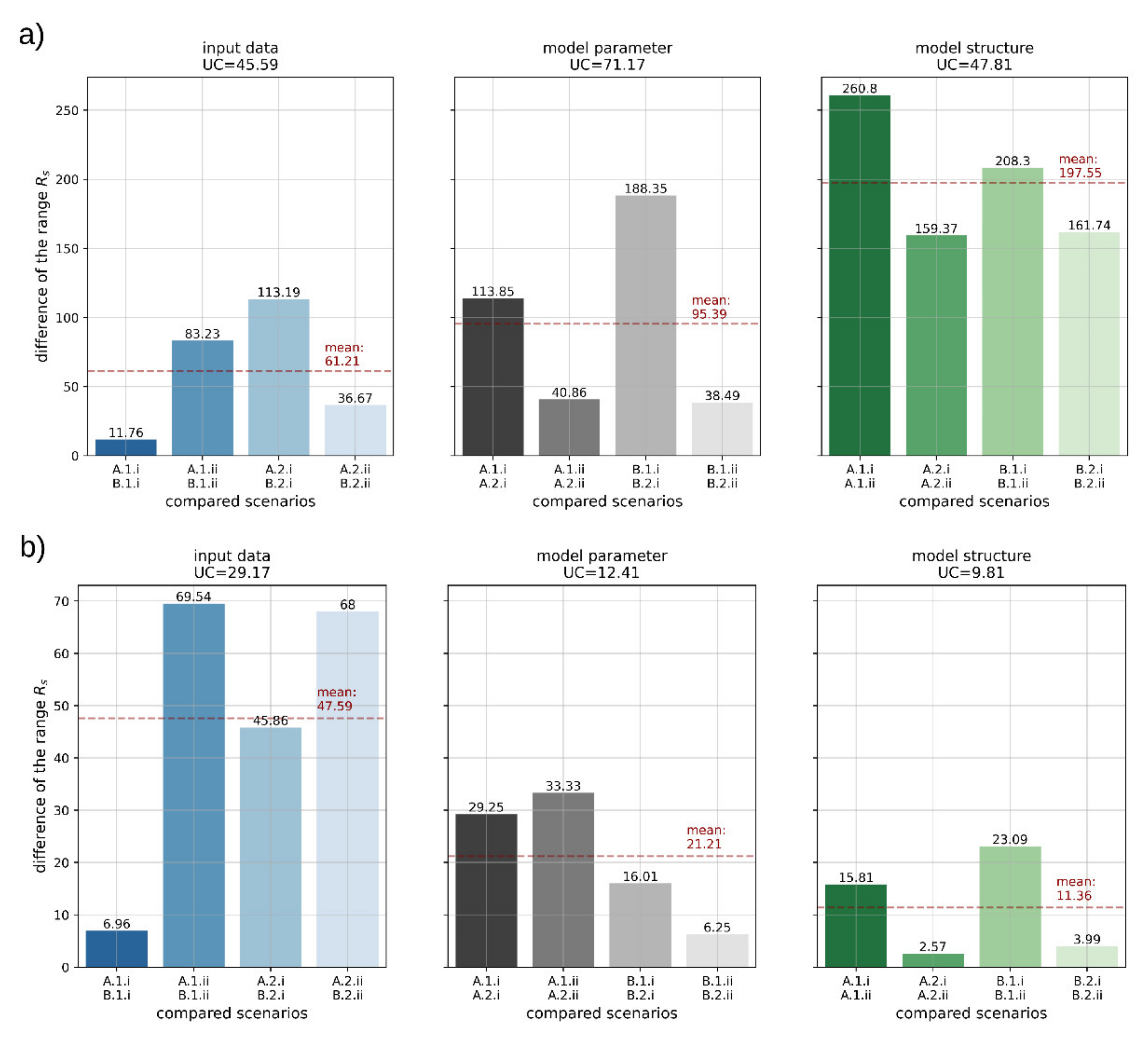
3.2. High-Impact Uncertainty Sources
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Overview of Sensitive Model Parameters of the Flooding Process

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameter: Surface Roughness [m-1/3/1] | ||||||
|---|---|---|---|---|---|---|
| Source | Impervious | Green Area | Trees and Bushes | Farmland | Water | Buildings |
| [93] | 0.12 | 0.352 | 0.3 | 0.09 | - | 0.011 |
| [45] * | 0.014 | - | 0.189 | 0.043 | 0.022 | 0.074 |
| [94] * | 0.048 | 0.275 | 0.4 | - | - | - |
| [95] | 0.015 | 0.28 | 0.45 | 0.02 | - | - |
| [51] | 0.015 | 0.28 | 0.45 | 0.02 | - | - |
| [48] * | 0.0176 | 0.285 | - | - | - | 0.012 |
| [57] | 0.036 | 0.233 | 0.25 | 0.096 | 0.0953 | 0.018 |
| [96] | 0.0155 | 0.3250 | 0.6 | 0.115 | - | - |
| [97] | 0.0105 | 0.014 | 0.012 | - | - | 0.0125 |
| [98] | 0.0125 | 0.2 | 0.25 | 0.04 | 0.02 | 0.05 |
| [99] | 0.0155 | 0.253 | - | 0.12 | 0.12 | 0.15 |
| [100] | 0.0105 | 0.065 | 0.12 | 0.038 | - | 0.035 |
| Model Parameter: Losses [mm] | |||||
|---|---|---|---|---|---|
| Source | Impervious | Green Area | Trees and Bushes | Farmland | Buildings |
| [101] | 1.88 | 3.75 | 8 | - | - |
| [102] * | 2.34 | 9.64 | 13.26 | 12.55 | - |
| [103] ** | 3 | 9 | 11.67 | 9 | 4 |
| [59] | 0.9 | 4 | 4 | 8.28 | 0.9 |
| [104] *** | 1.2 | 5.55 | 7.46 | 5.83 | 0.74 |
| [48] *** | 2 | 6 | 10 | - | 2 |
| [105] | 0.8 | 4.8 | 6.2 | 3.25 | - |
| [61] | 2.07 | 7.65 | 8.28 | 8.28 | 4.23 |
| Model Parameter: Hydraulic Conductivity [mm/h] | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Source | Sand | Loamy Sand | Sandy Loam | Loam | Siltloam | Sandy Clayloam | SandyClay | Silty Clay | Clay |
| [106] | 11.4 | 7.6 | 7.6 | 3.8 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 |
| [107] * | 360 | 11.7 | - | 2.34 | - | - | - | - | 0.44 |
| [108] | 210 | - | - | 13.2 | - | - | - | - | 0.6 |
| [109] | 297 | - | - | 2.6 | - | 13.1 | - | - | 2.6 |
| [110] | 150 | - | 3.5 | - | - | 4.5 | - | 0.54 | - |
| [111] | 120.34 | 29.97 | 10.92 | 3.3 | 6.6 | 1.52 | 1.02 | 0.51 | 0.25 |
| [99] | 210 | 61 | 26 | 13 | 6.8 | 4.3 | 1.2 | 0.9 | 0.6 |
| [112] | - | - | 44.2 | 10.4 | 4.5 | 13.08 | - | - | 2.58 |
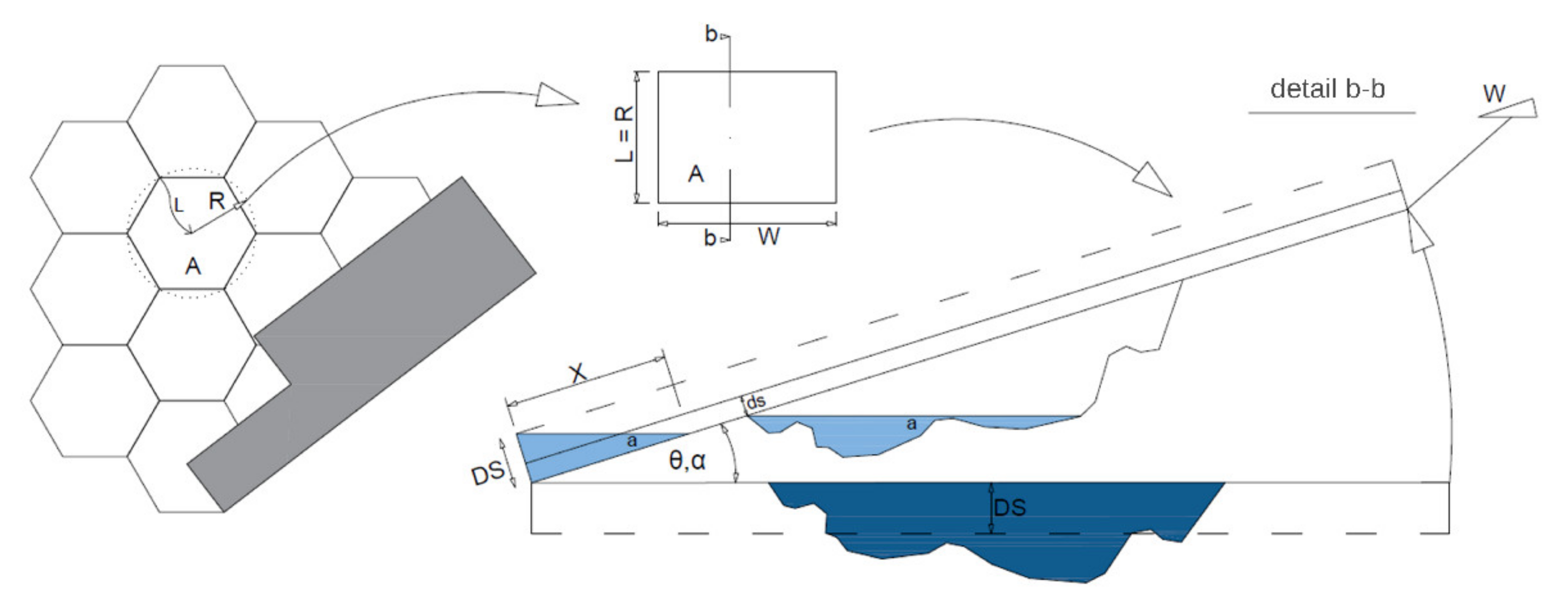
Appendix A.2. Reduction of the Depression Storage in Hillside Areas
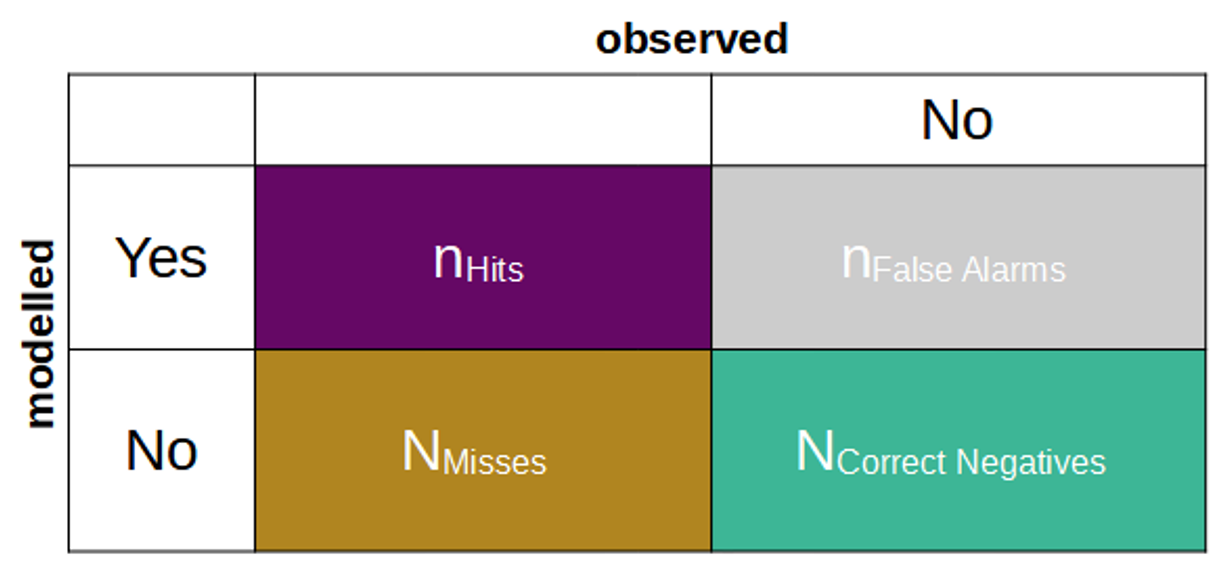
Appendix A.3. Qualitative Objective Functions
Appendix A.4. Quantitative Objective Functions
References
- Kundzewicz, Z.W.; Ulbrich, U.; Brücher, T.; Graczyk, D.; Krüger, A.; Leckebusch, G.C.; Menzel, L.; Pińskwar, I.; Radziejewski, M.; Szwed, M. Summer Floods in Central Europe–Climate Change Track? Nat. Hazards 2005, 36, 165–189. [Google Scholar] [CrossRef]
- The Mediterranean Region under Climate Change: A Scientific Update; Moatti, J.-P.; Thiébault, S. (Eds.) IRD Éditions: Marseille, France, 2016; ISBN 978-2-7099-2219-7. [Google Scholar]
- Berndtsson, R.; Becker, P.; Persson, A.; Aspegren, H.; Haghighatafshar, S.; Jönsson, K.; Larsson, R.; Mobini, S.; Mottaghi, M.; Nilsson, J.; et al. Drivers of changing urban flood risk: A framework for action. J. Environ. Manag. 2019, 240, 47–56. [Google Scholar] [CrossRef] [PubMed]
- O’Donnell, E.C.; Thorne, C.R. Drivers of future urban flood risk. Philos. Trans. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 2020, 378, 20190216. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IPCC. Global Warming of 1.5 °C. An IPCC Special Report on the Impacts of Global Warming of 1.5 °C above Pre-Industrial Levels and Related Global Greenhouse Gas Emission Pathways, in the Context of Strengthening the Global Response to the Threat of Climate Change, Sustainable Development, and Efforts to Eradicate Povertyte; lntergovernmental Panel on Clima Change: Geneva, Switzerland, 2018. [Google Scholar]
- Ashley, R.M.; Balmforth, D.J.; Saul, A.J.; Blanskby, J.D. Flooding in the Future–Predicting Climate Change, Risks and Responses in Urban Areas. Water Sci. Technol. 2005, 52, 265–273. [Google Scholar] [CrossRef] [PubMed]
- Freddy, V.; El Mehdi Saidi, M.; Douvinet, D.; Fehri, N.; Nasrallah, W.; Menad, W.; Mellas, S. Urbanization and Land Use as a Driver of Flood Risk. In The Mediterranen Region under Climate Change; Institut de Recherche Pour Le Développement Marseille; Ird Éditions Institut De Recherche Pour Le Développement: Marseille, France, 2016; pp. 563–575. ISBN 978-2-7099-2219-7. [Google Scholar]
- Trenberth, K.E. Changes in precipitation with climate change. Clim. Res. 2011, 47, 123–138. [Google Scholar] [CrossRef] [Green Version]
- Kundzewicz, Z.W.; Pińskwar, I.; Brakenridge, G. Changes in river flood hazard in Europe: A review. Hydrol. Res. 2018, 49, 294–302. [Google Scholar] [CrossRef]
- Davis, R. Flood and Hight Water Marks. Available online: http://floodlist.com/dealing-with-floods/flood-high-water-marks (accessed on 25 December 2021).
- Dankers, R.; Hiederer, D. Extreme Temperatures and Precipitation in Europe: Analysis of a High-Resolution Climate Change Scenario; The Publications Office of the European Union: Luxembourg, 2008. [Google Scholar]
- Nikulin, G.; Kjellstrom, E.; Hansson, U.; Strandberg, G.; Ullerstig, A. Evaluation and future projections of temperature, precipitation and wind extremes over Europe in an ensemble of regional climate simulations. Tellus A: Dyn. Meteorol. Oceanogr. 2011, 63, 41–55. [Google Scholar] [CrossRef] [Green Version]
- ZAMG Vermehrte Starkniederschläge? Available online: https://www.zamg.ac.at/cms/de/klima/informationsportal-klimawandel/klimavergangenheit/neoklima/starkniederschlag (accessed on 4 February 2021).
- Westra, S.J.; Fowler, H.J.; Evans, J.P.; Alexander, L.V.; Berg, P.R.; Johnson, F.; Kendon, E.J.; Lenderink, G.; Roberts, N.M. Future changes to the intensity and frequency of short-duration extreme rainfall: Future intensity of sub-daily rain-fall. Rev. Geophys. 2014, 52, 522–555. [Google Scholar] [CrossRef]
- KLIWA. Starkniederschläge Entwicklung in Vergangenheit Und Zukunft–Kurzbericht; Arbeitskreis KLIWA: Offenbach, Germany, 2019. [Google Scholar]
- Lehmann, J.; Coumou, D.; Frieler, K. Increased record-breaking precipitation events under global warming. Clim. Chang. 2015, 132, 501–515. [Google Scholar] [CrossRef]
- Berg, P.M.V.D.; Moseley, C.; Haerter, O.J. Strong increase in convective precipitation in response to higher temperatures. Nat. Geosci. 2013, 6, 181–185. [Google Scholar] [CrossRef]
- Pall, P.; Allen, M.R.; Stone, D.A. Testing the Clausius–Clapeyron constraint on changes in extreme precipitation under CO2 warming. Clim. Dyn. 2007, 28, 351–363. [Google Scholar] [CrossRef]
- Yin, J.; Ye, M.; Yin, Z.; Xu, S. A review of advances in urban flood risk analysis over China. Stoch. Hydrol. Hydraul. 2015, 29, 1063–1070. [Google Scholar] [CrossRef]
- Maier, R.; Krebs, G.; Pichler, M.; Muschalla, D.; Gruber, G. Spatial Rainfall Variability in Urban Environments—High-Density Precipitation Measurements on a City-Scale. Water 2020, 12, 1157. [Google Scholar] [CrossRef] [Green Version]
- Sapountzis, M.; Kastridis, A.; Kazamias, A.-P.; Karagiannidis, A.; Nikopoulos, P.; Lagouvardos, K. Utilization and Uncertainties of Satellite Precipitation Data in Flash Flood Hydrological Analysis in Ungauged Watersheds. Glob. NEST J. 2021, 23, 388–399. [Google Scholar] [CrossRef]
- Wild, T.; Dempsey, N.; Broadhead, A. Volunteered information on nature-based solutions–Dredging for data on deculverting. Urban For. Urban Green. 2019, 40, 254–263. [Google Scholar] [CrossRef]
- Plumb, B.D.; Juez, C.; Annable, W.K.; McKie, C.W.; Franca, M.J. The impact of hydrograph variability and frequency on sediment transport dynamics in a gravel-bed flume. Earth Surf. Process. Landforms 2019, 45, 816–830. [Google Scholar] [CrossRef]
- Galloway, G.; Brody, S.; Reilly, A.; Highfield, W. The Growing Threat of Urban Flooding; University of Maryland, Center for Disaster Resilience: College Park, MD, USA, 2018. [Google Scholar]
- Henonin, J.; Russo, B.; Mark, O.; Gourbesville, P. Real-time urban flood forecasting and modelling–A state of the art. J. Hydroinform. 2013, 15, 717–736. [Google Scholar] [CrossRef]
- Salvadore, E.; Bronders, J.; Batelaan, O. Hydrological modelling of urbanized catchments: A review and future directions. J. Hydrol. 2015, 529, 62–81. [Google Scholar] [CrossRef]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.W.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Rossman, L.A. Storm Water Management Model User’s Manual Version 5.1; US EPA National Risk Management Research Laboratory: Cincinnati, OH, USA, 2015. [Google Scholar]
- Vetsch, D.; Siviglia, A.; Bürgler, M.; Caponi, F.; Ehrbar, D.; Facchini, M.; Faeh, R.; Farshi, D.; Gerber, M.; Gerke, E.; et al. System Manuals of BASEMENT, Version 2.8.2; ETH Zurich, Laboratory of Hydraulics, Glaciology and Hydrology: Zurich, Switzerland, 2022; Available online: http://people.ee.ethz.ch/~basement/baseweb/download/documentation/BMdoc_System_Manual_v2-8-2.pdf (accessed on 23 May 2022).
- Ghimire, B.; Chen, A.S.; Guidolin, M.; Keedwell, E.C.; Djordjevic, S.; Savic, D. Formulation of a fast 2D urban pluvial flood model using a cellular automata approach. J. Hydroinform. 2013, 15, 676–686. [Google Scholar] [CrossRef] [Green Version]
- Guidolin, M.; Chen, A.; Ghimire, B.; Keedwell, E.C.; Djordjević, S.; Savić, D.A. A weighted cellular automata 2D inundation model for rapid flood analysis. Environ. Model. Softw. 2016, 84, 378–394. [Google Scholar] [CrossRef] [Green Version]
- Schmitt, T.G.; Thomas, M.; Ettrich, N. Analysis and modeling of flooding in urban drainage systems. J. Hydrol. 2004, 299, 300–311. [Google Scholar] [CrossRef]
- Djordjević, S.; Prodanovic, D.; Maksimović, C.; Ivetić, M.; Savić, D. SIPSON–Simulation of Interaction between Pipe flow and Surface Overland flow in Networks. Water Sci. Technol. 2005, 52, 275–283. [Google Scholar] [CrossRef]
- Leandro, J.; Chen, A.S.; Djordjević, S.; Savić, D.A. Comparison of 1D/1D and 1D/2D Coupled (Sewer/Surface) Hydraulic Models for Urban Flood Simulation. J. Hydraul. Eng. 2009, 135, 495–504. [Google Scholar] [CrossRef]
- Li, W.; Chen, Q.; Mao, J. Development of 1D and 2D coupled model to simulate urban inundation: An application to Beijing Olympic Village. Sci. Bull. 2009, 54, 1613–1621. [Google Scholar] [CrossRef] [Green Version]
- Vojinovic, Z.; Tutulic, D. On the use of 1D and coupled 1D-2D modelling approaches for assessment of flood damage in urban areas. Urban Water J. 2009, 6, 183–199. [Google Scholar] [CrossRef]
- Fan, Y.; Ao, T.; Yu, H.; Huang, G.; Li, X. A Coupled 1D-2D Hydrodynamic Model for Urban Flood Inundation. Adv. Meteorol. 2017, 2017, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Dong, B.; Xia, J.; Zhou, M.; Deng, S.; Ahmadian, R.; Falconer, R.A. Experimental and numerical model studies on flash flood inundation processes over a typical urban street. Adv. Water Resour. 2021, 147, 103824. [Google Scholar] [CrossRef]
- Gebreegziabher, M.; Demissie, Y. Modeling Urban Flood Inundation and Recession Impacted by Manholes. Water 2020, 12, 1160. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Q.; Leng, G.; Su, J.; Ren, Y. Comparison of urbanization and climate change impacts on urban flood volumes: Importance of urban planning and drainage adaptation. Sci. Total Environ. 2019, 658, 24–33. [Google Scholar] [CrossRef]
- Starl, H. Hangwassermodellierungen und deren Möglichkeit zur Abschätzung von potenziellen Gefährdungen für Gebäude. Bautechnik 2020, 97, 255–267. [Google Scholar] [CrossRef]
- Nielsen, R.; Thorndahl, S. Sensitivity Analysis of an Integrated Urban Flood Model. In New Trends in Urban Drainage Modelling; Mannina, G., Ed.; Green Energy and Technology; Springer International Publishing: Cham, Switzerland, 2019; pp. 723–728. ISBN 978-3-319-99866-4. [Google Scholar]
- Wang, Y.; Chen, A.; Fu, G.; Djordjevic, S.; Zhang, C.; Savić, D.A. An integrated framework for high-resolution urban flood modelling considering multiple information sources and urban features. Environ. Model. Softw. 2018, 107, 85–95. [Google Scholar] [CrossRef]
- Bulti, D.T.; Abebe, B.G. A review of flood modeling methods for urban pluvial flood application. Model. Earth Syst. Environ. 2020, 6, 1293–1302. [Google Scholar] [CrossRef]
- Bhola, P.K.; Leandro, J.; Disse, M. Framework for Offline Flood Inundation Forecasts for Two-Dimensional Hydrodynamic Models. Geosciences 2018, 8, 346. [Google Scholar] [CrossRef] [Green Version]
- Crotti, G.; Leandro, J.; Bhola, P.K. A 2D Real-Time Flood Forecast Framework Based on a Hybrid Historical and Synthetic Runoff Database. Water 2019, 12, 114. [Google Scholar] [CrossRef] [Green Version]
- Hofmann, J.; Schüttrumpf, H. Risk-Based and Hydrodynamic Pluvial Flood Forecasts in Real Time. Water 2020, 12, 1895. [Google Scholar] [CrossRef]
- Liu, J.; Shao, W.; Xiang, C.; Mei, C.; Li, Z. Uncertainties of urban flood modeling: Influence of parameters for different underlying surfaces. Environ. Res. 2020, 182, 108929. [Google Scholar] [CrossRef]
- Diakakis, M.; Andreadakis, E.; Nikolopoulos, E.; Spyrou, N.; Gogou, M.; Deligiannakis, G.; Katsetsiadou, N.; Antoniadis, Z.; Melaki, M.; Georgakopoulos, A.; et al. An integrated approach of ground and aerial observations in flash flood disaster investigations. The case of the 2017 Mandra flash flood in Greece. Int. J. Disaster Risk Reduct. 2019, 33, 290–309. [Google Scholar] [CrossRef]
- Grayson, R.; Blöschl, G. Spatial Modelling of Catchment Dynamics. In Spatial Patterns in Catchment Hydrology: Observations and Modelling; Grayson, R., Blöschl, G., Eds.; Cambridge University Press: Cambridge, UK, 2000; pp. 51–81. ISBN 978-0-521-63316-1. [Google Scholar]
- James, W. (Ed.) Rules for Responsible Modeling, 4th ed.; CHI: Guelph, ON, Canada, 2003; ISBN 0-9683681-5-8. [Google Scholar]
- EPA. Guidance Document on the Development, Evaluation, and Application of Environmental Models; US EPA: Washington, DC, USA, 2009. [Google Scholar]
- Dottori, F.; Di Baldassarre, G.; Todini, E. Detailed data is welcome, but with a pinch of salt: Accuracy, precision, and uncertainty in flood inundation modeling. Water Resour. Res. 2013, 49, 6079–6085. [Google Scholar] [CrossRef]
- Beven, K.; Lamb, R.; Leedal, D.; Hunter, N. Communicating uncertainty in flood inundation mapping: A case study. Int. J. River Basin Manag. 2015, 13, 285–295. [Google Scholar] [CrossRef]
- Bates, P.D.; Pappenberger, F.; Romanowicz, R.J. Uncertainty in Flood Inundation Modelling. In Applied Uncertainty Analysis for Flood Risk Management; Imperial College Press: London, UK, 2014; pp. 232–269. ISBN 978-1-84816-270-9. [Google Scholar]
- Hunter, N.M.; Bates, P.D.; Neelz, S.; Pender, G.; Villanueva, I.; Wright, N.G.; Liang, D.; Falconer, R.A.; Lin, B.; Waller, S.; et al. Benchmarking 2D Hydraulic Models for Urban Flooding. Proc. Inst. Civ. Eng. Water Manag. 2008, 161, 13–30. [Google Scholar] [CrossRef] [Green Version]
- LUBW Anhänge 1a, b, c Zum Leitfaden Kommunales Starkregenrisikomanagement in Baden-Württemberg. In Leitfaden Kommunales Starkregenrisikomanagement in Baden-Württemberg; Landesanstalt für Umwelt Baden-Württemberg: Karlsruhe, Germany, 2020; ISBN 978-3-88251-391-2.
- USDA. Urban Hydrology for Small Watersheds–TR-55; United States Department of Agriculture–Natural Resources Conservation Service–Conservation Engineering Division: Washington, DC, USA, 1986. [Google Scholar]
- Kidd, C.H.R. Rainfall-Runoff Processes over Urban Surfaces. In Proceedings of the International Workshop held at the Institute of Hydrology, Wallingford, UK, April 1978; Available online: https://nora.nerc.ac.uk/id/eprint/5787/1/IH_060.pdf (accessed on 1 June 2022).
- Viessman, W.; Lewis, G.L. Introduction to Hydrology, 5th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2003; ISBN 978-0-673-99337-3. [Google Scholar]
- Rossman, L.; Huber, W. Storm Water Management Model Reference Manual–Volume I–Hydrology (Revised); United States Environmental Protection Agency: Washington, DC, USA, 2016. [Google Scholar]
- Russo, B.; Gómez, M.; Tellez, J.; Tellez-Alvarez, J. Methodology to Estimate the Hydraulic Efficiency of Nontested Continuous Transverse Grates. J. Irrig. Drain. Eng. 2013, 139, 864–871. [Google Scholar] [CrossRef]
- Carvalho, R.F.; Lopes, P.; Leandro, J.; David, L.M. Numerical Research of Flows into Gullies with Different Outlet Locations. Water 2019, 11, 794. [Google Scholar] [CrossRef] [Green Version]
- Refsgaard, J.C. Hydrological Modelling and River Basin Management. Ph.D. Thesis, Geological Survey of Denmark and Greenland (GEUS), Danish Ministry of the Environment, Copenhagen, Denmark, 2007. [Google Scholar]
- Deletic, A.; Dotto, C.B.S.; McCarthy, D.T.; Kleidorfer, M.; Freni, G.; Mannina, G.; Uhl, M.; Henrichs, M.; Fletcher, T.D.; Rauch, W.; et al. Assessing uncertainties in urban drainage models. Phys. Chem. Earth, Parts A/B/C 2012, 42–44, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Comité commun des guides en métrologie, B. international des poids et mesures I.C.E.I.I.I.S.O.U.U.O. Evaluation of Measurement Data-Guide to the Expression of Uncertainty in Measurement Évaluation Des Données de Mesure (GUM 1995); JCGM: [S.l.]. 2008. Available online: https://www.bipm.org/documents/20126/2071204/JCGM_100_2008_E.pdf/cb0ef43f-baa5-11cf-3f85-4dcd86f77bd6 (accessed on 5 April 2022).
- René, J.-R.; Djordjević, S.; Butler, D.; Mark, O.; Hénonin, J.; Eisum, N.; Madsen, H. A real-time pluvial flood forecasting system for Castries, St. Lucia. J. Flood Risk Manag. 2015, 11, S269–S283. [Google Scholar] [CrossRef] [Green Version]
- Matzinger, A.; Pilger, M.L.; Nebauer, M.; Rouault, P. Potenzial von Bilddaten Aus Sozialen Medien Für Die Urbane Über-flutungsvorsorge–Versuch Einer Anwendung Für Zwei Extreme Starkregenereignisse in Berlin. In Proceedings of the Aqua Urbanica, Rigi-Kaltbad, Switzerland, 9–10 September 2019; p. 6. [Google Scholar]
- Néelz, S.; Pender, G. Benchmarking the Latest Generation of Hydraulic Modelling Packages; Department for Environment Food & Rural Affairs: Bristol, UK, 2013. [Google Scholar]
- Löwe, R.; Urich, C.; Domingo, N.S.; Mark, O.; Deletic, A.; Arnbjerg-Nielsen, K. Assessment of urban pluvial flood risk and efficiency of adaptation options through simulations–A new generation of urban planning tools. J. Hydrol. 2017, 550, 355–367. [Google Scholar] [CrossRef] [Green Version]
- Jamali, B.; Bach, P.M.; Deletic, A. Rainwater harvesting for urban flood management–An integrated modelling framework. Water Res. 2020, 171, 115372. [Google Scholar] [CrossRef]
- Bagheri, K.; Requieron, W.; Tavakol, H. Rick Engineering a Comparative Study of 2-Dimensional Hydraulic Modeling Software, Case Study: Sorrento Valley, San Diego, California. J. Water Manag. Model. 2020, 28, c471. [Google Scholar] [CrossRef]
- SEPA. Flood Modelling Guidance for Responsible Authorities; Scottish Environment Protection Agency: Stirling, UK, 2021. [Google Scholar]
- Mark, O.; Hénonin, J.; Domingo, N.; Russo, B.; Chen, A.; Djordjevic, S. Report and Papers with Guidelines on Calibration of Urban Flood Models; DHI Water, Environment & Health: Lakewood, CO, USA, 2014. [Google Scholar]
- Sene, K. Flash Floods: Forecasting and Warning; Springer: Berlin/Heidelberg, Germany, 2015; ISBN 978-94-007-9304-0. [Google Scholar]
- Belda, M.; Holtanová, E.; Halenka, T.; Kalvová, J. Climate classification revisited: From Köppen to Trewartha. Clim. Res. 2014, 59, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.; Edwards, E. Exploitation of new data types to create digital surface models for flood inundation modelling. Res. Rep. UR3 2006, 86. [Google Scholar]
- Mason, D.C.; Schumann, G.-P.; Bates, P.D. Data Utilization in Flood Inundation Models. In Flood Risk Science and Management; Wiley-Blackwell: Hoboken, NJ, USA, 2011; ISBN 978-1-4051-8657-5. [Google Scholar]
- Akhter, M.S.; Hewa, G.A. The Use of PCSWMM for Assessing the Impacts of Land Use Changes on Hydrological Responses and Performance of WSUD in Managing the Impacts at Myponga Catchment, South Australia. Water 2016, 8, 511. [Google Scholar] [CrossRef]
- Smith, G.P.; Davey, E.K.; Cox, R. Flood Hazard WRL Technical Report 2014/07; University of New South Wales: Sydney, Australia, 2014. [Google Scholar]
- Ball, J.; Babister, M.; Nathan, R.; Weeks, W.; Weinmann, E.; Retallick, M.; Testoni, I. (Eds.) Australian Rainfall and Runoff: A Guide to Flood Estimation; Commonwealth of Australia: Canberra, Australia, 2019. [Google Scholar]
- Reinstaller, S.; Muschalla, D. Qualitative Techniques to Evaluate Urban Flood Models. In Proceedings of the 12th International Conference of Urban Drainage Modelling, Costa Mesa, CA, USA, 10–12 January 2022. [Google Scholar]
- Bennett, N.D.; Croke, B.F.W.; Guariso, G.; Guillaume, J.H.A.; Hamilton, S.H.; Jakeman, A.J.; Marsili-Libell, S.; Newham, L.T.H.; Norton, J.P.; Perrin, C.; et al. Characterising performance of environmental models. Environ. Model. Softw. 2013, 40, 1–20. [Google Scholar] [CrossRef]
- James, R.; Finney, K.; Perera, N.; Peyron, N. SWMM5/PCSWMM Integrated 1D-2D Modeling. Presented at the Engineering Conferences International ECI Digital Archives. 2012. Available online: http://www.latornell.ca/wp-content/uploads/files/presentations/2015/Latornell_2015_W3F_Rob_James.pdf (accessed on 28 December 2021).
- Leandro, J.; Martins, R. A methodology for linking 2D overland flow models with the sewer network model SWMM 5.1 based on dynamic link libraries. Water Sci. Technol. 2016, 73, 3017–3026. [Google Scholar] [CrossRef] [PubMed]
- Sañudo, E.; Cea, L.; Puertas, J. Modelling Pluvial Flooding in Urban Areas Coupling the Models Iber and SWMM. Water 2020, 12, 2647. [Google Scholar] [CrossRef]
- Reyes-Silva, J.; Frauches, A.; Rojas-Gómez, K.; Helm, B.; Krebs, P. Determination of Optimal Meshness of Sewer Network Based on a Cost—Benefit Analysis. Water 2021, 13, 1090. [Google Scholar] [CrossRef]
- Bates, P.; De Roo, A. A simple raster-based model for flood inundation simulation. J. Hydrol. 2000, 236, 54–77. [Google Scholar] [CrossRef]
- Rossman, L.A. Storm Water Management Model Reference Manual Volume II–Hydraulics; US EPA National Risk Management Research Laboratory: Cincinnati, OH, USA, 2017. [Google Scholar]
- Juez, C.; Murillo, J.; García-Navarro, P. 2D simulation of granular flow over irregular steep slopes using global and local coordinates. J. Comput. Phys. 2013, 255, 166–204. [Google Scholar] [CrossRef]
- Ni, Y.; Cao, Z.; Liu, Q. Mathematical modeling of shallow-water flows on steep slopes. J. Hydrol. Hydromechanics 2019, 67, 252–259. [Google Scholar] [CrossRef] [Green Version]
- Leimgruber, J.; Krebs, G.; Camhy, D.; Muschalla, D. Sensitivity of Model-Based Water Balance to Low Impact Development Parameters. Water 2018, 10, 1838. [Google Scholar] [CrossRef] [Green Version]
- Bernet, D.B.; Zischg, A.P.; Prasuhn, V.; Weingartner, R. Modeling the extent of surface water floods in rural areas: Lessons learned from the application of various uncalibrated models. Environ. Model. Softw. 2018, 109, 134–151. [Google Scholar] [CrossRef]
- Crawford, N.H.; Linsley, R.K. Digital Simulation in Hydrology: Stanford Watershed Model IV; Civil Engineering Department, Stanford University: Palo Alto, CA, USA, 1966. [Google Scholar]
- Engman, E.T. Roughness Coefficients for Routing Surface Runoff. J. Irrig. Drain. Eng. 1986, 112, 39–53. [Google Scholar] [CrossRef]
- McCuen, R.; Johnson, P.; Ragan, R. Highway Hydrology; Federal Highway Administration: Washington, DC, USA, 1996. [Google Scholar]
- Monschein, M.; Gamerith, V. 1D/2D Gekoppelte Hydrodynamische Modellierung Urbaner Sturzfluten-Los1; Hydroconsult GmbH: Graz, Austria, 2020. [Google Scholar]
- Tyrna, B.; Assmann, A.; Fritsch, K.; Johann, G. Large-scale high-resolution pluvial flood hazard mapping using the raster-based hydrodynamic two-dimensional model FloodAreaHPC. J. Flood Risk Manag. 2018, 11, S1024–S1037. [Google Scholar] [CrossRef] [Green Version]
- USDA. KINEROS. A Kinematic Runoff and Erosion Model–Documentation and User Manuel; USDA: Washington, DC, USA, 1990. [Google Scholar]
- Yen, B.C. Hydraulics of Sewer Systems; Elsevier: New York, NY, USA, 2001. [Google Scholar]
- ASCE Design and Construction of Urban Stormwater Management Systems. In ASCE Manuals and Reports of Engineering Practice No. 77 Manual of Practice. No. 5; WEF Manual Practice FD-20; ASCE: New York, NY, USA, 1992; ISBN 0-7844-7366-8.
- Barr Engineering Company Abstractions (Interception and Depression Storage) (Item 5, Work Order 1); Minneapolis. 2010. Available online: http://ecoursesonline.iasri.res.in/mod/page/view.php?id=2214 (accessed on 25 November 2021).
- Endreny, T. Land Use and Land Cover Effects on Runoff Processes: Urban and Suburban Development. In Encyclopedia of Hydrological Sciences; American Cancer Society: New York, NY, USA, 2006; ISBN 978-0-470-84894-4. [Google Scholar]
- Krebs, G.; Kokkonen, T.; Setälä, H.; Koivusalo, H. Parameterization of a Hydrological Model for a Large, Ungauged Urban Catchment. Water 2016, 8, 443. [Google Scholar] [CrossRef]
- Maniak, U. Hydrologie und Wasserwirtschaft: Eine Einführung für Ingenieure; Springer: Berlin, Germany, 2016; ISBN 978-3-662-49087-7. [Google Scholar]
- Akan, A.O. Urban Stormwater Hydrology a Guide to Engineering Calculations; CRC Press: Boca Raton, FL, USA, 1993. [Google Scholar]
- Ali, S.; Islam, A.; Mishra, P.; Sikka, A.K. Green-Ampt approximations: A comprehensive analysis. J. Hydrol. 2016, 535, 340–355. [Google Scholar] [CrossRef]
- Brooks, R.H.; Corey, A.T. Hydraulic Properties of Porous Media; Hydrology Papers Colorado State University: Fort Collins, CO, USA, 1964. [Google Scholar]
- Chen, L.; Xiang, L.; Young, M.H.; Yin, J.; Yu, Z.; van Genuchten, M. Optimal parameters for the Green-Ampt infiltration model under rainfall conditions. J. Hydrol. Hydromech. 2015, 63, 93–101. [Google Scholar] [CrossRef] [Green Version]
- Deng, P.; Zhu, J. Analysis of effective Green–Ampt hydraulic parameters for vertically layered soils. J. Hydrol. 2016, 538, 705–712. [Google Scholar] [CrossRef]
- Rawls, W.J.; Brakensiek, D.L.; Miller, N. Green-ampt Infiltration Parameters from Soils Data. J. Hydraul. Eng. 1983, 109, 62–70. [Google Scholar] [CrossRef] [Green Version]
- Del Vigo, Á.; Zubelzu, S.; Juana, L. Infiltration models and soil characterisation for hemispherical and disc sources based on Green-Ampt assumptions. J. Hydrol. 2021, 595, 125966. [Google Scholar] [CrossRef]
- Thiemig, V.; Bisselink, B.; Pappenberger, F.; Thielen, J. A Pan-African Flood Forecasting System. Hydrol. Earth Syst. Sci. Discuss. 2014, 11, 5559–5597. [Google Scholar]

| Model Parameter: Surface Roughness [m−1/3/1] | ||||
| Land Cover | Parameter Range | Initial Value | Calibration Value | Rel. Difference[%] |
| impervious | 0.0105–0.024 | 0.016 | 0.02 | 34 |
| green area | 0.13–0.352 | 0.275 | 0.34 | 28 |
| forest/tree/bush | 0.012–0.8 | 0.275 | 0.51 | 95 |
| farmerland | 0.02–0.18 | 0.041 | 0.14 | 151 |
| water | 0.02–0.2 | 0.059 | 0.03 | 66 |
| Buildings | 0.011–0.074 | 0.018 | 0.023 | 38 |
| model parameter: losses [mm] | ||||
| land cover | parameter range | initial value | calibration value | range (R) [%] |
| impervious | 0.8–2.34 | 1.94 | 2.35 | 21 |
| green area | 3.75–9.64 | 5.78 | 8.09 | 35 |
| forest/tree/ bush | 4–13.26 | 8.14 | 11.4 | 51 |
| farmerland | 3.25–12.55 | 7.06 | 11.4 | 53 |
| water | - | - | - | - |
| buildings | 0.74–4.23 | 2 | 3.28 | 63 |
| model parameter: hydraulic conductivity [mm/h] | ||||
| soil type | parameter range | initial value | calibration value | range (R) [%] |
| loam-sand | 0.25–360 | 29.9 (loamy sand) | 59.94 (sand) | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reinstaller, S.; Krebs, G.; Pichler, M.; Muschalla, D. Identification of High-Impact Uncertainty Sources for Urban Flood Models in Hillside Peri-Urban Catchments. Water 2022, 14, 1973. https://doi.org/10.3390/w14121973
Reinstaller S, Krebs G, Pichler M, Muschalla D. Identification of High-Impact Uncertainty Sources for Urban Flood Models in Hillside Peri-Urban Catchments. Water. 2022; 14(12):1973. https://doi.org/10.3390/w14121973
Chicago/Turabian StyleReinstaller, Stefan, Gerald Krebs, Markus Pichler, and Dirk Muschalla. 2022. "Identification of High-Impact Uncertainty Sources for Urban Flood Models in Hillside Peri-Urban Catchments" Water 14, no. 12: 1973. https://doi.org/10.3390/w14121973
APA StyleReinstaller, S., Krebs, G., Pichler, M., & Muschalla, D. (2022). Identification of High-Impact Uncertainty Sources for Urban Flood Models in Hillside Peri-Urban Catchments. Water, 14(12), 1973. https://doi.org/10.3390/w14121973