
Understanding Uncertainty in Probabilistic Floodplain Mapping in the Time of Climate Change


Abstract
1. Introduction
2. Study Area and Data
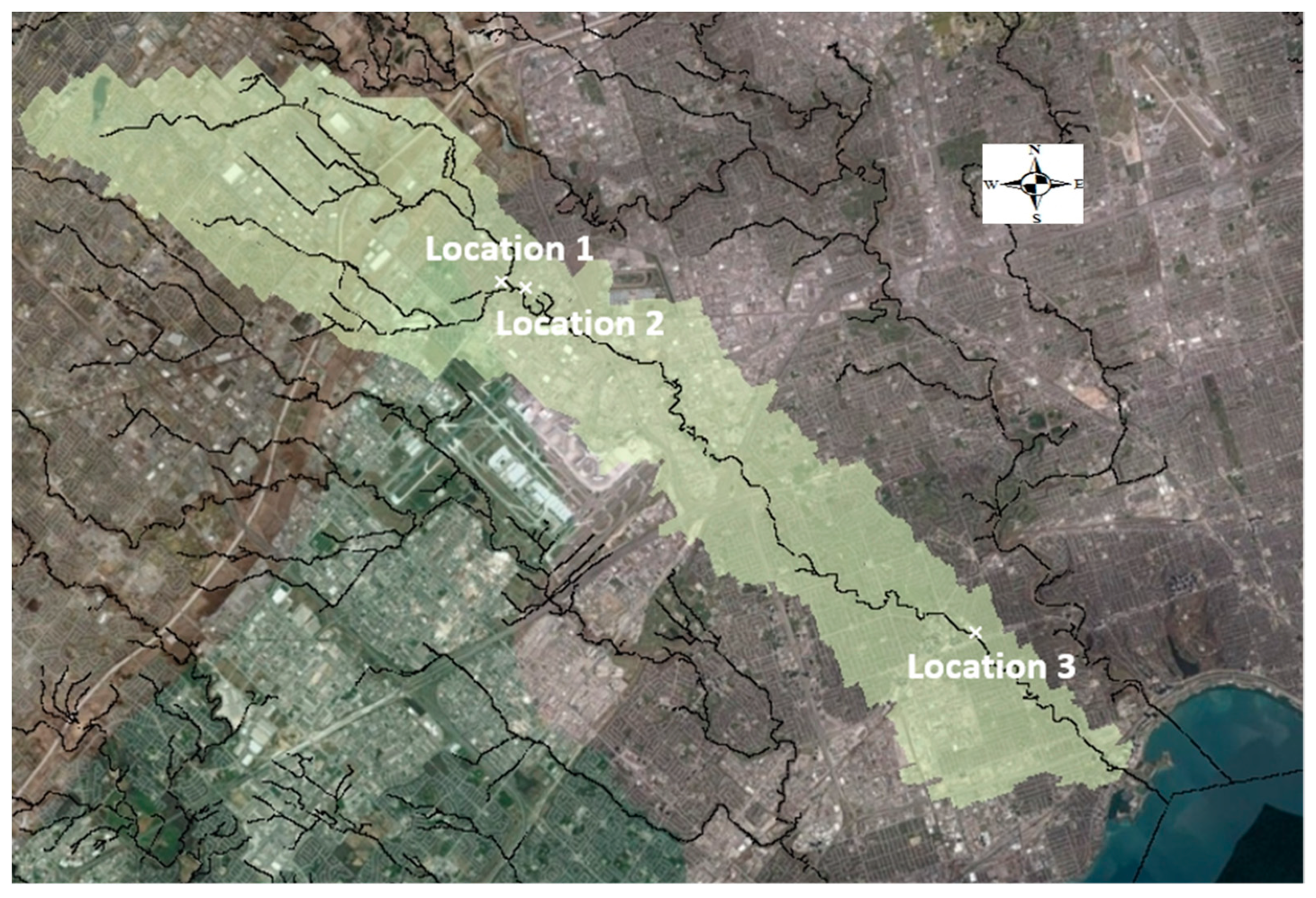
2.1. Study Area
2.2. Data Requirements and Collection
3. Methodology
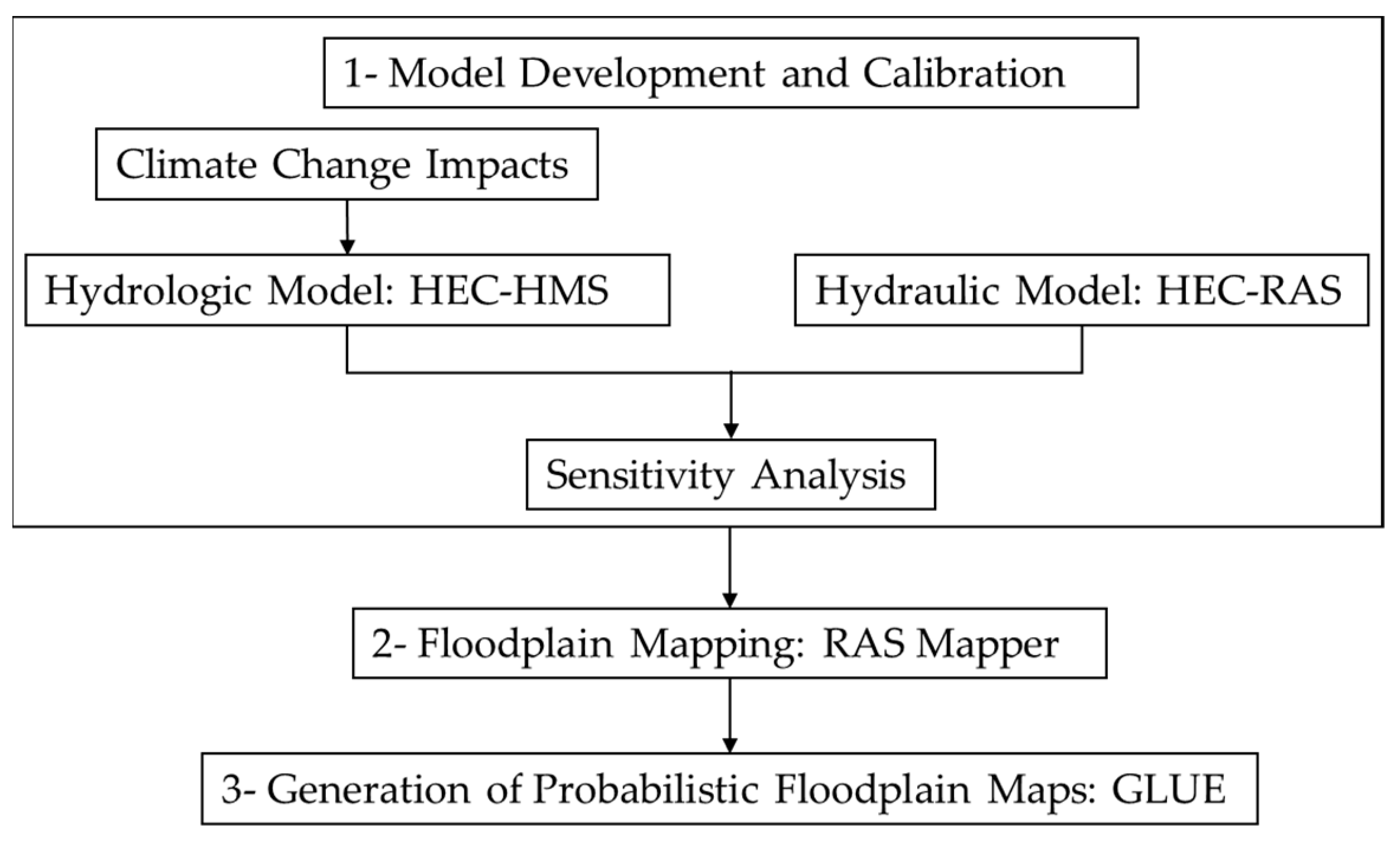
3.1. Integrated Flood Modeling and Floodplain Mapping
3.2. Hydrologic Modeling: HEC-HMS
3.2.1. Hydrologic Model Calibration
3.2.2. Sensitivity Analysis to Identify Uncertain Parameters
3.3. Hydraulic Modeling: HEC-RAS
Sensitivity Analysis to Identify Uncertain Parameters
3.4. Floodplain Mapping
3.5. Probabilistic Floodplain Mapping: GLUE
4. Results
4.1. Hydrologic Model Calibration
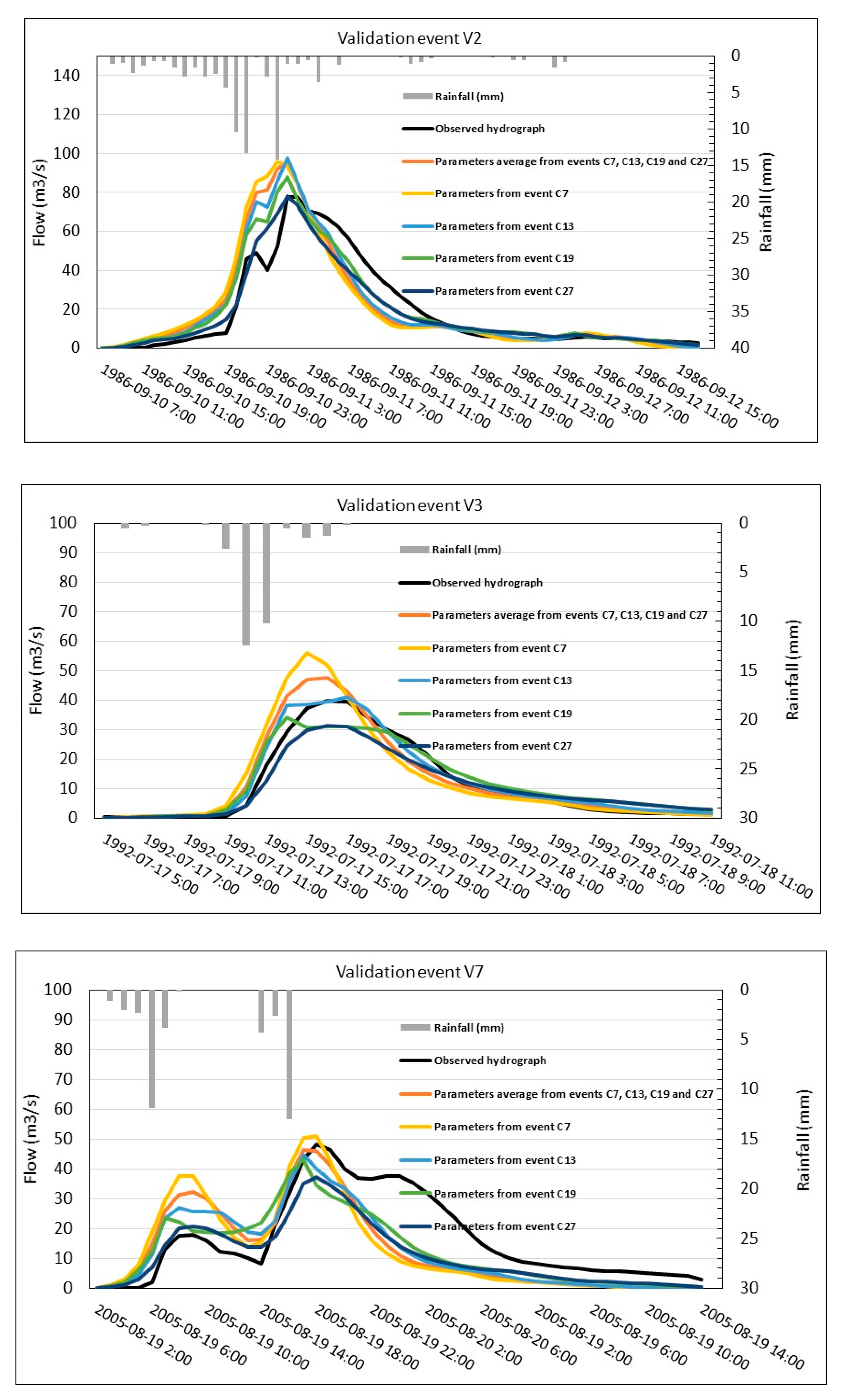
4.2. Validation of the Hydrologic—Hydraulic Modeling to Generate Floodplain Maps
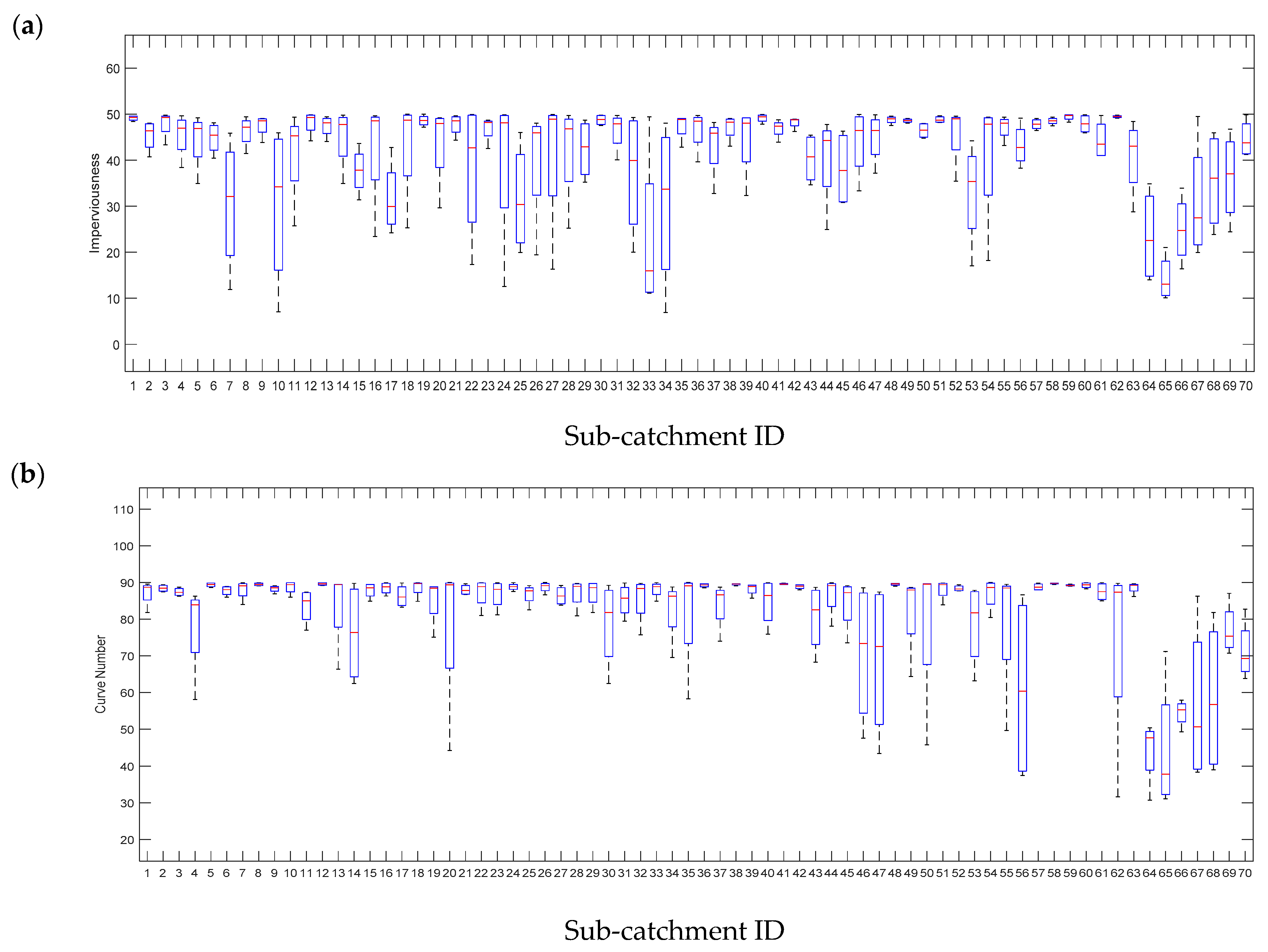
4.3. Uncertainty Analysis
Identifying Sensitive Parameters in Hydrologic and Hydraulic Modeling
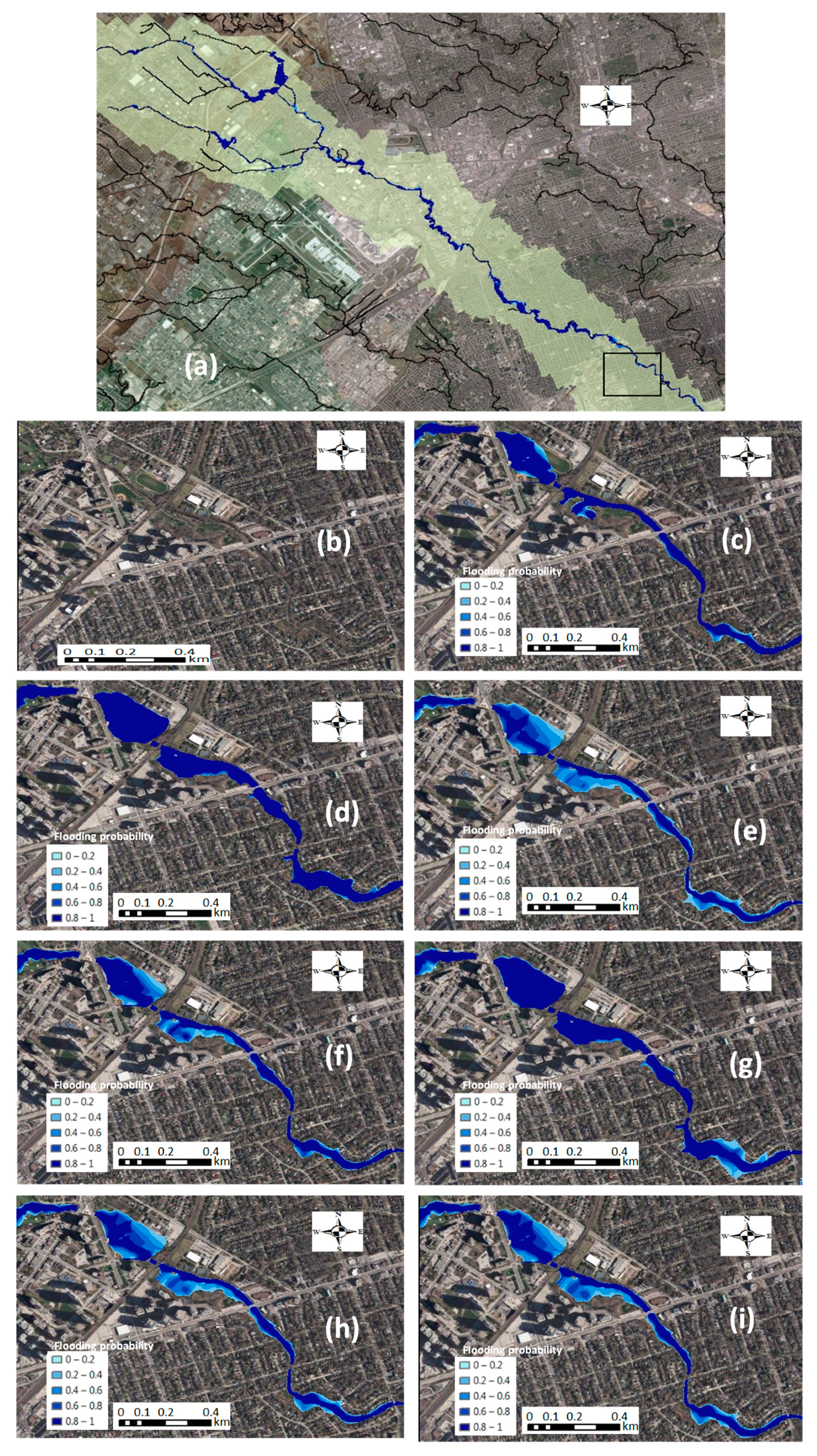
4.4. Developing Floodplain Maps
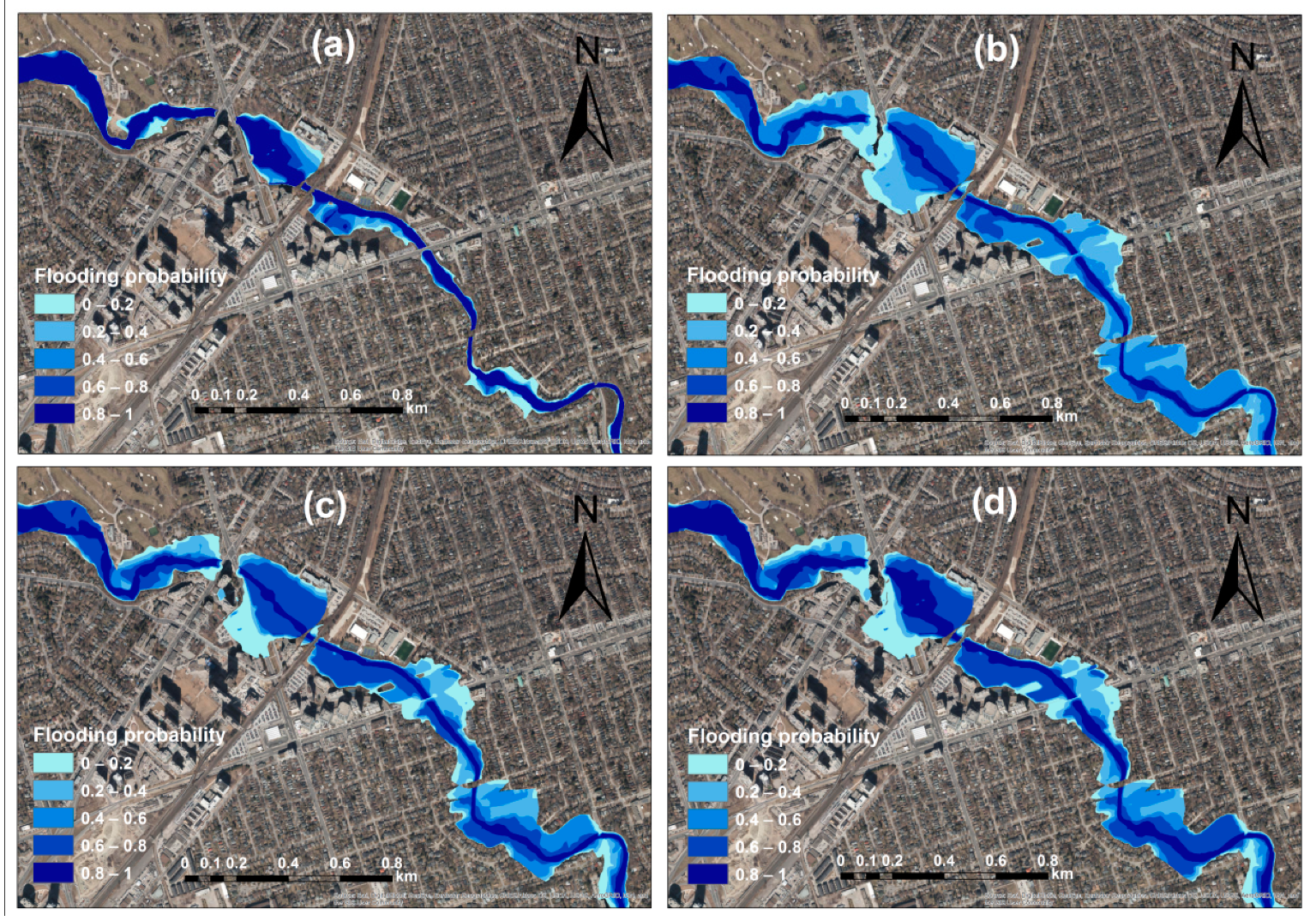
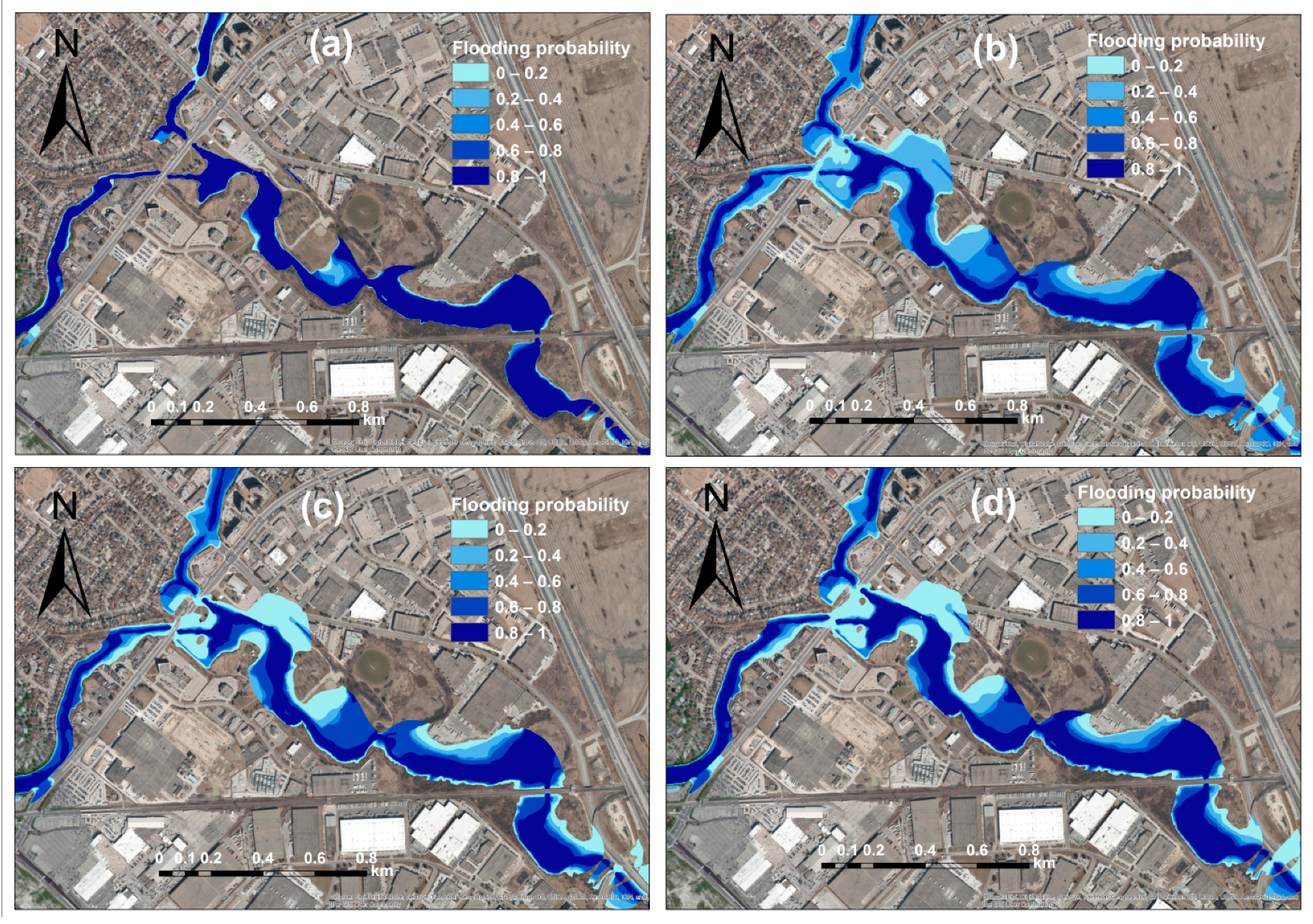
4.4.1. Probabilistic Floodplain Mapping Considering Different Uncertainties
4.4.2. Future Probabilistic Floodplain Mapping under Climate Change
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Freer, J.; Beven, K.J.; Neal, J.; Schumann, G.; Hall, J.; Bates, P. Risk and uncertainty assessment for natural hazards. In Flood Risk and Uncertainty; Rougier, J., Sparks, S., Hill, L., Eds.; Cambridge University Press: Cambridge, UK, 2011; pp. 190–233. [Google Scholar]
- Noji, E.K. Natural disaster. Crit. Care Clin. 1991, 7, 271–292. [Google Scholar] [CrossRef]
- Ohl, C.; Tapsell, S. Flooding and human health: The dangers posed are not always obvious. Br. Med. J. 2000, 321, 1167–1168. [Google Scholar] [CrossRef]
- Thieken, A.H.; Cammerer, H.; Dobler, C.; Lammel, J.; Schoberl, F. Estimating changes in flood risks and benefits of non-structural adaptation strategies—A case study from Tyrol, Austria. Mitig. Adapt. Strateg. Glob. Chang. 2016, 21, 343. [Google Scholar] [CrossRef]
- Zahmatkesh, Z.; Jha, S.K.; Coulibaly, P.; Stadnyk, T. An overview of river flood forecasting procedures in Canadian watersheds. Can. Water Resour. J./Rev. Can. Resour. Hydr. 2019, 44, 213–229. [Google Scholar] [CrossRef]
- Lott, N.; Ross, T. Tracking and Evaluating US Billion Dollar Weather Disasters, 1980–2005; NOAA National Climatic Data Center: Asheville, NC, USA, 2006; pp. 1–6.
- Choryński, A.; Pińskwar, I.; Kron, W.; Brakenridge, G.R.; Kundzewicz, Z.W. Catalogue of large floods in Europe in the 20th century. In Changes in Flood Risk in Europe; CRC Press: Boca Raton, FL, USA, 2019; pp. 40–67. [Google Scholar]
- Mosavi, A.; Ozturk, P.; Chau, K.W. Flood prediction using machine learning models: Literature review. Water 2018, 10, 1536. [Google Scholar] [CrossRef]
- Abbott, M.B.; Bathurst, J.C.; Cunge, J.A.; O’Connell, P.E.; Rasmussen, J. An introduction to the European Hydrological System e systeme Hydrologique Europeen, ‘‘SHE’’, 1: History and Philosophy of a physically-based distributed modelling system. J. Hydrol. 1986, 87, 45–59. [Google Scholar] [CrossRef]
- Arduino, G.; Reggiani, P.; Todini, E. Recent advances in flood forecasting and flood risk assessment. Hydrol. Earth Syst. Sci. 2005, 9, 280–284. [Google Scholar] [CrossRef]
- Beven, K. Changing ideas in hydrology—The case of physically-based models. J. Hydrol. 1989, 105, 157–172. [Google Scholar] [CrossRef]
- Bhuiyan, M.; Dutta, D. Analysis of flood vulnerability and assessment of the impacts in coastal zones of Bangladesh due to potential sea-level rise. Nat. Hazards 2012, 61, 729–743. [Google Scholar] [CrossRef]
- Dutta, D.; Teng, J.; Vaze, J.; Lerat, J.; Hughes, J.; Marvanek, S. Storage-based approaches to build floodplain inundation modelling capability in river system models for water resources planning and accounting. J. Hydrol. 2013, 504, 12–28. [Google Scholar] [CrossRef]
- Merz, B.; Kreibich, H.; Schwarze, R.; Thieken, A. Review article ‘Assessment of economic flood damage’. Nat. Hazards Earth Syst. Sci. 2010, 10, 1697–1724. [Google Scholar] [CrossRef]
- Vaze, J.; Viney, N.; Stenson, M.; Renzullo, L.; Van Dijk, A.; Dutta, D.; Crosbie, R.; Lerat, J.; Penton, D.; Vleeshouwer, J.; et al. The Australian Water Resource Assessment System (AWRA). In Proceedings of the 20th International Congress on Modelling and Simulation (MODSIM2013), Adelaide, Australia, 1–6 December 2013. [Google Scholar]
- Apel, H.; Thieken, A.; Merz, B.; Bloschl, G. A probabilistic modelling system for assessing flood risks. Nat. Hazards 2006, 38, 79–100. [Google Scholar] [CrossRef]
- Dutta, D.; Herath, S.; Musiake, K. An application of a flood risk analysis system for impact analysis of a flood control plan in a river basin. Hydrol. Processes 2006, 20, 1365–1384. [Google Scholar] [CrossRef]
- Bales, J.D.; Wagner, C.R. Sources of uncertainty in flood inundation maps. J. Flood Risk Manag. 2009, 2, 139–147. [Google Scholar] [CrossRef]
- Beven, K. Environmental Modelling: An Uncertain Future? CRC Press: London, UK, 2009. [Google Scholar]
- Jung, Y.; Merwade, V. Estimation of uncertainty propagation in flood inundation mapping using a 1-D hydraulic model. Hydrol. Processes 2015, 29, 624–640. [Google Scholar] [CrossRef]
- Dottori, F.; Di Baldassarre, G.; Todini, E. Detailed data is welcome, but with a pinch of salt: Accuracy, precision, and uncertainty in flood inundation modeling. Water Resour. Res. 2013, 49, 6079–6085. [Google Scholar]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Ter Braak, C.J.; Clark, M.P.; Hyman, J.M.; Robinson, B.A. Treatment of input uncertainty in hydrologic modeling: Doing hydrology backward with Markov chain Monte Carlo simulation. Water Resour. Res. 2008, 44, 1–15. [Google Scholar] [CrossRef]
- Farmakis, C.; Dimitriadis, P.; Bellos, V.; Papanicolaou, P.; Koutsoyiannis, D. Investigation of the uncertainty of spatial flood inundation among widely used 1D/2D hydrodynamic models. In Geophysical Research Abstracts; EGU General Assembly: Vienna, Austria, 2019. [Google Scholar]
- Kalyanapu, A.J.; McPherson, D.R.; Burian, S.J. Monte Carlo-based flood modelling framework for estimating probability weighted flood risk. J. Flood Risk Manag. 2012, 5, 37–48. [Google Scholar] [CrossRef]
- Neal, J.; Keef, C.; Bates, P.; Beven, K.; Leedal, D. Probabilistic flood risk mapping including spatial dependence. Hydrol. Processes 2013, 27, 1349–1363. [Google Scholar] [CrossRef]
- Nuswantoro, R.; Diermanse, F.; Molkenthin, F. Probabilistic flood hazard maps for Jakarta derived from a stochastic rain-storm generator. J. Flood Risk Manag. 2016, 9, 105–124. [Google Scholar] [CrossRef]
- Issermann, M.; Chang, F.J. Uncertainty analysis of spatiotemporal models with point estimate methods (PEMs)—The case of the ANUGA Hydrodynamic Model. Water 2020, 12, 229. [Google Scholar] [CrossRef]
- Hu, R.; Fang, F.; Pain, C.C.; Navon, I.M. Rapid spatio-temporal flood prediction and uncertainty quantification using a deep learning method. J. Hydrol. 2019, 575, 911–920. [Google Scholar] [CrossRef]
- Wu, Y.; Ding, Y.; Zhu, Y.; Feng, J.; Wang, S. Complexity to forecast flood: Problem definition and spatiotemporal attention LSTM solution. Complexity 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Muhadi, N.A.; Abdullah, A.F.; Bejo, S.K.; Mahadi, M.R.; Mijic, A. The Use of LiDAR-Derived DEM in Flood Applications: A Review. Remote Sens. 2020, 12, 2308. [Google Scholar] [CrossRef]
- Olthof, I.; Svacina, N. Testing Urban Flood Mapping Approaches from Satellite and In-Situ Data Collected during 2017 and 2019 Events in Eastern Canada. Remote Sens. 2020, 12, 3141. [Google Scholar] [CrossRef]
- Thiemann, M.; Trosset, M.; Gupta, H.; Sorooshian, S. Bayesian recursive parameter estimation for hydrological models. Water Resour. Res. 2001, 37, 2521–2535. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Gupta, H.V.; Bouten, W.; Sorooshian, S. A Shuffled Complex Evolution Metropolis algorithm for optimization and uncertainty assessment of hydrologic model parameters. Water Resour. Res. 2003, 39, 1201. [Google Scholar] [CrossRef]
- Wagener, T.; McIntyre, N.; Lees, M.J.; Wheater, H.S.; Gupta, H.V. Towards reduced uncertainty in conceptual rainfall-runoff modelling: Dynamic identifiability analysis. Hydrol. Processes 2003, 17, 455–476. [Google Scholar] [CrossRef]
- Neuman, S.P. Maximum likelihood Bayesian averaging of uncertain model predictions. Stoch. Environ. Res. Risk Assess. 2003, 17, 291–305. [Google Scholar] [CrossRef]
- Moradkhani, H.; Sorooshian, S.; Gupta, H.V.; Houser, P. Dual state parameter estimation of hydrologic models using ensemble Kalman filter. Adv. Water Resour. 2005, 28, 135–147. [Google Scholar] [CrossRef]
- Moradkhani, H.; Hsu, K.L.; Gupta, H.V.; Sorooshian, S. Uncertainty assessment of hydrologic model states and parameters: Sequential data assimilation using the particle filter. Water Resour. Res. 2005, 4, 1–17. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Gupta, H.V.; Nualláin, B.; Bouten, W. Real-time data assimilation for operational ensemble streamflow forecasting. J. Hydrometeorol. 2006, 7, 548–565. [Google Scholar] [CrossRef]
- Matott, L.S.; Babendreier, J.E.; Purucker, S.T. Evaluating uncertainty in integrated environmental models: A review of concepts and tools. Water Resour. Res. 2009, 45, 1–14. [Google Scholar] [CrossRef]
- Razavi, S.; Sheikholeslami, R.; Gupta, H.V.; Haghnegahdar, A. VARS-TOOL: A toolbox for comprehensive, efficient, and robust sensitivity and uncertainty analysis. Environ. Model. Softw. 2019, 112, 95–107. [Google Scholar] [CrossRef]
- Alfonso, L.; Mukolwe, M.M.; Di Baldassarre, G. Probabilistic Flood Maps to support decision-making: Mapping the Value of Information. Water Resour. Res. 2016, 52, 1026–1043. [Google Scholar] [CrossRef]
- Di Baldassarre, G.; Schumann, G.; Bates, P.; Freer, J.; Beven, K. Floodplain mapping: A critical discussion on deterministic and probabilistic approaches. Hydrol. Sci. J. 2010, 55, 364–376. [Google Scholar] [CrossRef]
- Krzysztofowicz, R. The case for probabilistic forecasting in hydrology. J. Hydrol. 2001, 249, 2–9. [Google Scholar] [CrossRef]
- Pappenberger, F.; Beven, K.J. Ignorance is bliss: Or seven reasons not to use uncertainty analysis. Water Resour. Res. 2006, 42, W05302. [Google Scholar] [CrossRef]
- Apel, H.; Thieken, A.H.; Merz, B.; Bloschl, G. Flood risk assessment and associated uncertainty. Nat. Hazards Earth Syst. Sci. 2004, 4, 295–308. [Google Scholar] [CrossRef]
- Bates, P.D.; Horritt, M.S.; Aronica, G.; Beven, K. Bayesian updating of flood inundation likelihoods conditioned on flood extent data. Hydrol. Processes 2004, 18, 3347–3370. [Google Scholar] [CrossRef]
- Di Baldassarre, G.; Castellarin, A.; Montanari, A.; Brath, A. Probability-weighted hazard maps for comparing different flood risk management strategies: A case study. Nat. Hazards 2009, 50, 479–496. [Google Scholar] [CrossRef]
- Domeneghetti, A.; Vorogushyn, S.; Castellarin, A.; Merz, B.; Brath, A. Probabilistic flood hazard mapping: Effect of uncertain boundary conditions. Hydrol. Earth Syst. Sci. 2013, 17, 3127–3140. [Google Scholar] [CrossRef]
- Jalayer, F.; De Risi, R.; De Paola, F.; Giugni, M.; Manfredi, G.; Gasparini, P.; Topa, M.E.; Yonas, N.; Yeshitela, K.; Nebebe, A.; et al. Probabilistic GIS-based method for delineation of urban flooding risk hotspots. Nat. Hazards 2014, 73, 975–1001. [Google Scholar] [CrossRef]
- Pappenberger, F.; Beven, K.; Horritt, M.; Blazkova, S. Uncertainty in the calibration of effective roughness parameters in HEC-RAS using inundation and downstream level observations. J. Hydrol. 2005, 302, 46–69. [Google Scholar] [CrossRef]
- Büchele, B.; Kreibich, H.; Kron, A.; Thieken, A.; Ihringer, J.; Oberle, P.; Merz, B.; Nestmann, F. Flood-risk mapping: Contributions towards an enhanced assessment of extreme events and associated risks. Nat. Hazards Earth Syst. Sci. 2006, 6, 485–503. [Google Scholar] [CrossRef]
- Candela, A.; Aronica, G.T. Probabilistic Flood Hazard Mapping Using Bivariate Analysis Based on Copulas. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2017, 3, A4016002. [Google Scholar] [CrossRef]
- Hall, J.W.; Manning, L.J.; Hankin, R.K.S. Bayesian calibration of a flood inundation model using spatial data. Water Resour. Res. 2011, 47, W05529. [Google Scholar] [CrossRef]
- Beven, K.; Binley, A. The future of distributed models: Model calibration and uncertainty prediction. Hydrol. Processes 1992, 6, 279–298. [Google Scholar] [CrossRef]
- Montanari, A. What do we mean by uncertainty? The need for a consistent wording about uncertainty assessment in hydrology. Hydrol. Processes 2006, 21, 841–845. [Google Scholar] [CrossRef]
- Pedrozo-Acuña, A.; Rodríguez-Rincón, J.P.; Arganis-Juárez, M.; Domínguez-Mora, R.; González Villareal, F.J. Estimation of probabilistic flood inundation maps for an extreme event: Pánuco River, México. J. Flood Risk Manag. 2015, 8, 177–192. [Google Scholar] [CrossRef]
- Alazzy, A.A.; Lü, H.; Zhu, Y. Assessing the uncertainty of the Xinanjiang rainfall-runoff model: Effect of the likelihood function choice on the GLUE method. J. Hydrol. Eng. 2015, 20, 04015016. [Google Scholar] [CrossRef]
- Aronica, G.; Bates, P.D.; Horritt, M.S. Assessing the uncertainty in distributed model predictions using observed binary pattern information within GLUE. Hydrol. Processes 2002, 16, 2001–2016. [Google Scholar] [CrossRef]
- Brandimarte, L.; Di Baldassarre, G. Uncertainty in design flood profiles derived by hydraulic modelling. Hydrol. Res. 2012, 43, 753–761. [Google Scholar] [CrossRef]
- Horritt, M.S. A methodology for the validation of uncertain flood inundation models. J. Hydrol. 2006, 326, 153–165. [Google Scholar] [CrossRef]
- Hunter, N.M.; Bates, P.D.; Horritt, M.S.; De Roo, A.P.J.; Werner, M.G. Utility of different data types for calibrating flood inundation models within a GLUE framework. Hydrol. Earth Syst. Sci. 2005, 9, 412–430. [Google Scholar] [CrossRef]
- Mason, D.C.; Bates, P.D.; Dall’Amico, J.T. Calibration of uncertain flood inundation models using remotely sensed water levels. J. Hydrol. 2009, 368, 224–236. [Google Scholar] [CrossRef]
- Romanowicz, R.; Beven, K. Estimation of flood inundation probabilities as conditioned on event inundation maps. Water Resour. Res. 2003, 39, SWC41–SWC412. [Google Scholar] [CrossRef]
- Romanowicz, R.J.; Beven, K.J.; Young, P.C. Uncertainty Propagation in a Sequential Model for Flood Forecasting. In Proceedings of the Symposium S7 held during the Seventh IAHS Scientific Assembly, Foz do Iguaçu, Brazil, 17–23 September 2006; pp. 177–184. [Google Scholar]
- Werner, M.G.F.; Hunter, N.M.; Bates, P.D. Identifiability of distributed floodplain roughness values in flood extent estimation. J. Hydrol. 2005, 314, 139–157. [Google Scholar] [CrossRef]
- Lespinas, F.; Dastoor, A.; Fortin, V. Performance of the dynamically dimensioned search algorithm: Influence of parameter initialization strategy when calibrating a physically based hydrological model. Hydrol. Res. 2018, 49, 971–988. [Google Scholar] [CrossRef]
- Awol, F.S.; Coulibaly, P.; Tolson, B.A. Event-based model calibration approaches for selecting representative distributed parameters in semi-urban watersheds. Adv. Water Resour. 2018, 118, 12–27. [Google Scholar] [CrossRef]
- Milly, P.C.D.; Betancourt, J.; Falkenmark, M.; Hirsch, R.M.; Kundzewicz, Z.W.; Lettenmaier, D.P.; Stouffer, R.J. Climate change: Stationarity is dead: Whither water management? Science 2008, 319, 573–574. [Google Scholar] [CrossRef] [PubMed]
- Milly, P.C.D.; Wetherald, R.T.; Dunne, K.A.; Delworth, T.L. Increasing risk of great floods in a changing climate. Nature 2002, 415, 514–517. [Google Scholar] [CrossRef]
- Slater, J.; Villarini, G.; Archfield, S.; Faulkner, D.; Lamb, R.; Khouakhi, A.; Yin, Y. Global Changes in 20-Year, 50-Year, and 100-Year River Floods. Geophys. Res. Lett. 2021, 48, e2020GL091824. [Google Scholar] [CrossRef]
- Agrawal, N. Defining Natural Hazards–Large Scale Hazards. In Natural Disasters and Risk Management in Canada; Springer: Dordrecht, The Netherlands, 2018; pp. 1–40. [Google Scholar]
- Doberstein, B.; Fitzgibbons, J.; Mitchell, C. Protect, accommodate, retreat or avoid (PARA): Canadian community options for flood disaster risk reduction and flood resilience. Nat. Hazards 2019, 98, 31–50. [Google Scholar] [CrossRef]
- Rincón, D.; Khan, U.; Armenakis, C. Flood Risk Mapping Using GIS and Multi-Criteria Analysis: A Greater Toronto Area Case Study. Geosci. J. 2018, 8, 275. [Google Scholar] [CrossRef]
- Boyle, S.J.; Tsanis, I.K.; Kanaroglou, P.S. Developing geographic information systems for land use impact assessment in flooding conditions. J. Water Resour. Plan. Manag. 1998, 124, 89–98. [Google Scholar] [CrossRef]
- Kokas, T. Effect of Land Use and Low Impact Development Measures on Urban Flood Hazard: A Case Study in the Black Creek Watershed. Master’s Thesis, The University of Western Ontario, London, ON, Canada, 2017. [Google Scholar]
- Nirupama, N.; Armenakis, C.; Montpetit, M. Is flooding in Toronto a concern? Nat. Hazards 2014, 72, 1259–1264. [Google Scholar] [CrossRef]
- TRCA; AMEC. Hydrologic Impacts of Future Development on Flood Flows and Mitigation Requirements in the Humber River Watershed-Draft Report; AMEC Environment & Infrastructure to Toronto and Region Conservation Authority Toronto: Toronto, ON, Canada, 2012. [Google Scholar]
- MMM Group Limited. Draft Final Report: Etobicoke Creek Hydrology Update, Prepared for Toronto and Region Conservation Authority. 2013. Available online: https://s3-ca-central-1.amazonaws.com/trcaca/app/uploads/2018/10/17181839/Etobicoke-Creek-Hydrology-_-March-2013_FINAL.pdf (accessed on 4 December 2019).
- Wang, X.; Huang, G.; Liu, J.; Li, Z.; Zhao, S. Ensemble projections of regional climatic changes over Ontario, Canada. J. Clim. 2015, 28, 7327–7346. [Google Scholar] [CrossRef]
- Ganguli, P.; Coulibaly, P. Assessment of future changes in intensity-duration-frequency curves for Southern Ontario using North American (NA)-CORDEX models with nonstationary methods. J. Hydrol. Reg. Stud. 2019, 22, 100587. [Google Scholar] [CrossRef]
- Greck and Associates Limited. Available online: https://www.greck.ca/ (accessed on 10 May 2019).
- Halwatura, D.; Najim, M.M.M. Application of the HEC-HMS model for runoff simulation in a tropical catchment. Environ. Model. Softw. 2013, 46, 155–162. [Google Scholar] [CrossRef]
- MMM Group Limited. Final Report: Hydrologic Modeling Mimico Creek, Prepared for Toronto and Region Conservation Authority. 2009. Available online: https://s3-ca-central-1.amazonaws.com/trcaca/app/uploads/2016/07/17181839/Final-Report-Hydrologic-Modeling-Mimico-Creek-Dec-2009.pdf (accessed on 4 December 2019).
- Tolson, B.A.; Shoemaker, C.A. Dynamically dimensioned search algorithm for computationally efficient watershed model calibration. Water Resour. Res. 2007, 43, 1–16. [Google Scholar] [CrossRef]
- Matott, L.S. OSTRICH: An Optimization Software Tool: Documentation and Users Guide; University at Buffalo: Buffalo, NY, USA, 2005. [Google Scholar]
- Qin, Y.; Kavetski, D.; Kuczera, G. A robust Gauss-Newton algorithm for the optimization of hydrological models: Benchmarking against industry-standard algorithms. Water Res. Res. 2018, 54, 9637–9654. [Google Scholar] [CrossRef]
- Coulibaly, P.; Bobée, B.; Anctil, F. Improving extreme hydrologic events forecasting using a new criterion for artificial neural network selection. Hydrol. Processes 2001, 15, 1533–1536. [Google Scholar] [CrossRef]
- Khan, M.S.; Coulibaly, P. Bayesian neural network for rainfall-runoff modeling. Water Resour. Res. 2006, 42, 1–18. [Google Scholar] [CrossRef]
- Awol, F.S.; Coulibaly, P.; Tsanis, I.; Unduche, F. Identification of hydrological models for enhanced ensemble reservoir inflow forecasting in a large complex prairie watershed. Water 2019, 11, 2201. [Google Scholar] [CrossRef]
- Smart, G.M. Improving flood hazard prediction models. Int. J. River Basin Manag. 2018, 16, 449–456. [Google Scholar] [CrossRef]
- Toronto and Region Conservation Authority (TRCA). Available online: https://trca.ca/app/uploads/2016/04/05-16-ReportPackage-Executive-Committee_Jul08_2016.pdf (accessed on 21 March 2020).
- Di Baldassarre, G.; Montanari, A. Uncertainty in river discharge observations: A quantitative analysis. Hydrol. Earth Syst. Sci. 2009, 13, 913–921. [Google Scholar] [CrossRef]
- Maione, U.; Mignosa, P.; Tomirotti, M. Regional estimation model of synthetic design hydrographs. Int. J. River Basin Manag. 2003, 1, 151–163. [Google Scholar] [CrossRef]
- Chow, T.V.; Maidment, D.R.; Mays, L.W. Applied Hydrology; McGraw-Hill: New York, NY, USA, 1988. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Calibration Event ID | C7 | C13 | C19 | C27 |
|---|---|---|---|---|
| Storm Date | 20 March 1980 | 29 September 1986 | 14 January 1995 | 2 April 2009 |
| Cumulative rainfall (mm) | 33.8 | 58.7 | 62.1 | 40.6 |
| Peak flow (m3/s) | 31.7 | 62.3 | 38.9 | 28.0 |
| Flow volume (mm) | 26.6 | 44.3 | 56.0 | 25.8 |
| Validation Event ID | Date | Cumulative Rainfall (mm) | Streamflow Peak (m3/s) | Streamflow Volume (mm) |
|---|---|---|---|---|
| V1 | 22 February 1975 | 37.9 | 30.3 | 36.2 |
| V2 | 10 September 1986 | 76.3 | 77.85 | 58.5 |
| V3 | 17 July 1992 | 30.0 | 39.6 | 18.6 |
| V4 | 28 August 1992 | 38.2 | 51.8 | 24.1 |
| V5 | 20 January 1995 | 41.7 | 32.5 | 36.6 |
| V6 | 5 October 1995 | 79.9 | 58.5 | 37.5 |
| V7 | 19 August 2005 | 41.3 | 48.23 | 39.0 |
| V8 | 19 October 2011 | 49.0 | 40.8 | 32.5 |
| V9 | 4 September 2012 | 43.9 | 42.8 | 18.0 |
| Location | Observed Flood Depth (m) | Simulated Flood Depth (m) |
|---|---|---|
| 1 | 162.7 | 163.3 |
| 2 | 162.1 | 162.1 |
| 3 | 115.2 | 115.9 |
| Scenario | Hydrologic Model Input (Rainfall) | Hydrologic Model Parameters (θ) | Hydrologic Model Input and Parameters (Rainfall and θ) | Hydraulic Model Parameters (Floodplain and Channels’ Manning) |
|---|---|---|---|---|
| S1 | × | × | × | ✓ |
| S2 | × | ✓ | × | × |
| S3 | ✓ | × | × | × |
| S4 | × | × | ✓ | × |
| S5 | × | ✓ | × | ✓ |
| S6 | ✓ | × | × | ✓ |
| S7 | × | × | ✓ | ✓ |
| Scenario | S1 | S2 | S3 | S4 | S5 | S6 | S7 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Statistic | mean | std | mean | std | mean | std | mean | std | mean | std | mean | std | mean | std |
| Upstream | 0.97 | 0.02 | 0.59 | 0.06 | 0.32 | 0.12 | 0.29 | 0.08 | 0.60 | 0.07 | 0.37 | 0.11 | 0.29 | 0.12 |
| Downstream | 0.34 | 0.06 | 0.79 | 0.03 | 0.42 | 0.16 | 0.43 | 0.10 | 0.77 | 0.10 | 0.39 | 0.17 | 0.39 | 0.16 |
| Scenario | a | b | c | d |
|---|---|---|---|---|
| Upstream mean water level (m) | 206.99 | 207.73 | 207.53 | 207.97 |
| Downstream mean water level (m) | 85.8 | 87.32 | 87.01 | 87.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zahmatkesh, Z.; Han, S.; Coulibaly, P. Understanding Uncertainty in Probabilistic Floodplain Mapping in the Time of Climate Change. Water 2021, 13, 1248. https://doi.org/10.3390/w13091248
Zahmatkesh Z, Han S, Coulibaly P. Understanding Uncertainty in Probabilistic Floodplain Mapping in the Time of Climate Change. Water. 2021; 13(9):1248. https://doi.org/10.3390/w13091248
Chicago/Turabian StyleZahmatkesh, Zahra, Shasha Han, and Paulin Coulibaly. 2021. "Understanding Uncertainty in Probabilistic Floodplain Mapping in the Time of Climate Change" Water 13, no. 9: 1248. https://doi.org/10.3390/w13091248
APA StyleZahmatkesh, Z., Han, S., & Coulibaly, P. (2021). Understanding Uncertainty in Probabilistic Floodplain Mapping in the Time of Climate Change. Water, 13(9), 1248. https://doi.org/10.3390/w13091248