1. Introduction
Pumping stations operation plays a significant role in energy consumption in urban water networks. The electricity consumed by pump stations corresponds to 20% of the total electricity demanded in the world. Almost 95% of energy consumption in water networks is related to pumping energy costs, and 90% of the total cost of the pumps cycle life is related to operational cost [
1]. In fact, the Europe Commission [
2] established a goal to save at least 27% of consumed energy for 2030 in order to mitigate climate change problems.
These previous antecedents could incentivize researchers such as Casasso et al. [
3] and Candilejo et al. [
4] to develop strategies to improve energy efficiency in water infrastructures that include pumping stations. The Environmental Protection Agency (EPA) [
5] defined several measures to save energy in pumping stations, such as reduced pressure service, managed pressure service, maximized efficiency of the system, and adequate pump and control modes selections. In addition, pumping system sizing, piping layout, and head pressure demands are principal factors to improve a pump station’s efficiency. Changing pumping operational mode used to be the most common strategy to achieve consumed energy optimization [
6]. Besides, implementing variable frequency drives (VFD) and automatic control modes on pumping stations are other methods to optimize operational costs [
7].
Most investigations about pumping optimization in water supply systems focused on pump scheduling optimization with fixed speed pumps (FSPs) to minimize the operation costs. A pump scheduling optimization is a process that starts with a pump model and with a determined number of pumps that are previously set. Then, this problem consists of selecting a number of pumps in a pumping station to be operated and determining the current state of the pumps (switch on/off) in every interval of time. This set of pumps in operation must satisfy objectives such as minimizing the amount of electric energy and the requirements of demands of the water network [
5].
In last three decades, there have been developed some mathematical methods to solve pump scheduling problems, including linear programming [
8,
9], nonlinear programming [
10,
11], and dynamin programming [
12,
13]. The problem of these mathematical methods is that they are computationally slow. Later, more powerful methods were developed to solve pump scheduling optimization that highlight the metaheuristic method (evolutive algorithms). For example, Lopez-Ibañez et al. [
14] presented a new form of pump scheduling based on time controlled triggers and using ant colony optimization (ACO), where the objective is to minimize electricity cost. Magalhaes-Costa et al. [
15] established a general optimization routine for any water distribution system that is integrated to EPANET [
16] using a branch and bound algorithm. De Paola et al. [
17] developed a modified harmony search multi-objective optimization in the operation of pumping stations to optimize the energy consumption in water networks. In addition, Wang H. et al. [
18] used particle swarm optimization (PSO) in a drainage pumping station optimization. Besides, Mohsen et al. [
19] used a non-dominated sorting genetic algorithm in a multi-objective optimization tool to minimize electricity cost and pollution emission of pumping stations in water networks. Finally, goal programming is another method that has been highlighted in the last years for pumping operation optimization. Abdallah and Kapelan [
20] developed an iterative extended lexicographic goal programming for fast FSP scheduling optimization in order to minimize consumption energy.
In the last twenty years, the use of VSPs has been developed, and the benefits of these pumps in energy terms compared with FSPs have been demonstrated in different applications such as water supply networks or ground water pumping [
21,
22]. Even despite these benefits, pumping scheduling methods are more common with FSP. The principal reason is associated with the increasing complexity of the pump scheduling problem. In fact, the optimization of VSPs depends on discretization of VSPs speeds [
23]. Another important aspect is to find the optimal number of running pumps. Therefore, it increases the number of decision variables and the computation time and could lead to the problem of suboptimal solution [
24].
Several works of literature of VSP scheduling used metaheuristic methods, including genetic algorithm (GA) [
25,
26]. Furthermore, other optimization methods are highlighted, such as ant colony optimization [
27] or particle swarm solution [
28]. In order to improve computational time, Rao and Salmons [
29] combined artificial neural networks (ANNs) with a GA. Then, Abdallah and Kapelan [
30] developed a fast VSP scheduling method through an improved goal programming algorithm to optimize the energy cost in a computationally efficient manner.
Another alternative to optimize a pumping station in energy terms is to use control systems so that a pumping station operates according to the requirements of the flow and the head of the water network and does not consume excess energy by the pumps. In this way, Lamaddalena and Khila [
31] developed a methodology to regulate pumping systems in an irrigation network to save energy consumption. In that methodology, they used FSP and VSP to adapt the pumping system to the head system curve. The head system curve that was used in these previous works can be defined as the minimum head required to satisfy the flow demand in the consumption nodes, as these demands vary in space and time. However, this concept is quite complex to apply in water networks because there are many head systems as demand consume varies. In a similar way, Nowak et al. [
32] presented an optimization process using VSPs with different constraints in operational controls. There could be different pumping configurations with FSPs and VSPs for pumping stations in water networks. However, using more FSPs than the minimum required in the system generates significant benefits in energy costs because pumps improve their efficiency, as was demonstrated by Walsky and Creaco [
33]. Later, Candilejo et al. [
4,
34] improved a methodology to estimate pump’s performance for a proper design of a pumping station in order to reduce operational costs and then create a methodology for the optimal design of a water pumping system with variable flow rates.
On the other hand, León-Celi et al. [
35,
36] developed a methodology that optimizes the flow rate of multiple pump stations and the energy consumption in closed water networks. A simpler concept (set-point curve) was used in this methodology, and it is defined as the minimum head required at the exit of the pumping station to guarantee the flow demand and to maintain the minimum pressure required at the critical consumption node at every time step [
37]. Thus, as a difference of the head system curve, the set-point curve has only one curve for every pump station. However, this methodology does not consider the selection of pump models. In fact, the energy was computed only with theorical values. Furthermore, the efficiency of pump stations was assumed with a constant value.
A problem of optimization of a pumping station is that the process is based with a fixed model of a pump and a set number of pumps. Therefore, the optimization of consumed energy is limited to the model of pump and the number of pumps that were previously set. Another problem is that it has not been deepened in a pumping station design. There is not a clear criterion to select the most suitable pump model and determine the total number of pumps. In fact, a pumping station is usually designed in maximum situations (maximum demand flow and maximum pressure service). However, a pumping station rarely operates in these conditions. Hence, a control system allows that the operation of a pumping station be adapted to the requirements of the network. Even though the pumping configurations of regulation modes are usually limited to the number of pumps that were previously set, other pumping configurations that could be more optimal in energy terms have not been evaluated.
On the other hand, a problem of previous works related with VSPs is that they assumed a constant efficiency regardless of changes in the rotational speed of the pump. In fact, this efficiency is affected by rotational speed and by the frequency inverter’s performance. Consequently, the calculated energy of VSPs is lower than the real energy used, and it derivates to an inaccuracy of operational costs [
38]. Simpson and Marchi [
39] evaluated the approximation of affinity lows to estimate the efficiency of a VSP, and they concluded that the best efficient point (BEP) of the efficiency using the affinity laws has a deviation in relation to the real BEP. However, there are expressions that reduce this inaccuracy, such as Sarbu and Borza expressions [
40]. Later, Coelho and Andrade-Campos [
41] developed an expression to correct the deviation of the BEP of the affinity laws.
A variable frequency drive (VFD) can be defined as an electrical device that converts the wave power from the power supply into the variable frequency power and sends it to the motor. Its performance is the relation between the input power of the motor and the input power of the frequency inverter [
42]. Several works have realized laboratory tests to measure the efficiency of VFD devices, such as Europump and the Hydraulic Institute [
42] and Aranto [
43]. These tests consist of measuring the efficiencies of VFD with different percentages of the motor load where the electrical frequency is changed from a minimum to a maximum value (50 Hz in Europe).
In this way, one of the novelties of this present work is to develop a new methodology that determines the most suitable energetical number of pumps in a pumping station design. In addition, this work determines the optimal number of FSPs and VSPs and the pumping configuration, thus the consumed energy would be minimal in the regulation mode of the pumping station. Evidently, the selection of the pump model is the one with the lowest operational and investment costs. Nonetheless, the objective of this work is to solve what the number of pumps and the most suitable regulation mode for a pump model are. Furthermore, another novelty of this work is to consider some important aspects of VSPs such as the effect that produces on the global efficiency, the rotational speed changes, and its influence over the performance of a frequency inverter. Accordingly, this work develops an expression to estimate the performance of a frequency, and this expression is adjusted to the experimental results of previous literature.
Basically, this work is not exactly a pump scheduling optimization. In fact, this is a new methodology of pumping station design in which the main objective is to calculate the total number of pumps so that the consumed energy is the minimum. In addition, this work determines the optimal operational combination of FSPs and VSPs for every flow rate of the network on a control system. This methodology begins with a set pump model and the set-point curve of a network. To achieve this objective, this work develops a methodology based on the operation of a pumping control system and some important concepts such as the pumping curve, the efficiency curve, and the set-point curve. It is important to mention that this work is focused on determining the optimal number of pumps but not on selecting the most adequate pump model.
2. Methods
2.1. Methodology of Pumping Control System
A pumping system is usually designed for the maximum requirements of the network, thus it is considered the maximum demand flow (
Qmax) and the maximum total dynamic head required (
Hmax) to supply the requirements of demand flow and pressure for the network. The total dynamic head is defined as the total equivalent head to be pumped and includes the suction head, the static head, the head losses produced by the friction in the piping system, and the required pressure of the nodes. However, there are several forms to select the necessary number of pumps in a pumping station. The most common hypotheses are as follows. One hypothesis is to set a number of pumps, and from this fixed value, the pump model is selected. The second hypothesis is to set a pump model according to the maximum requirements of the network and then calculate the number of pumps (
Npumps). It is calculated by the following expression that is the relation between the maximum demand flow of the system (
Qmax) and the flow that one pump could supply with the total dynamic head when the demand flow is
Qmax or, in other words, the maximum dynamic head required (
Qb,hmax).
The term int in equation indicates that Npumps is the next higher integer of the value obtained in this expression. In this way, we named the classic method to the second hypothesis when a pump model is set according to the maximum requirements of the network, and then the number of pumps is calculated.
In order to optimize the energy in a pumping system, the pumping curve has to be as close as possible to the set-point curve and the efficiency of the pump needs to operate near the best efficient point. This statement is achieved by different configurations of control systems, combining FSPs and VSPs and different control modes (flow and pressure).
A control system makes operational points of the pump (Q, H) match with the set-point curve of the network. The pressure and the flow of the system are constantly measured with their respective controls, and then these values are sent to a programmable logic controller (PLC). These values are compared with the variables of the set-point curve, and it orders the pumps to change the rotational speed of the VSP in order for the pumps to operate at the same points of the set-point curve. A classic control system has two ways of operation: pressure and flow control. A pressure control system aims to maintain a constant head pressure at the exit of the pump station through a pressure switch that sends signals to a PLC, and this device order the pump station to maintain the set head pressure. On the other way, a flow control system presumes to measure instantly the head pressure and the flow at the exit of the pump station whose measures are sent to a PLC. This PLC orders the pump station to operate at the correspondent rotational speed (N) so that it follows the set-point curve. This work only analyzes the operation of a flow control system. However, the pressure control systems operate in a similar way.
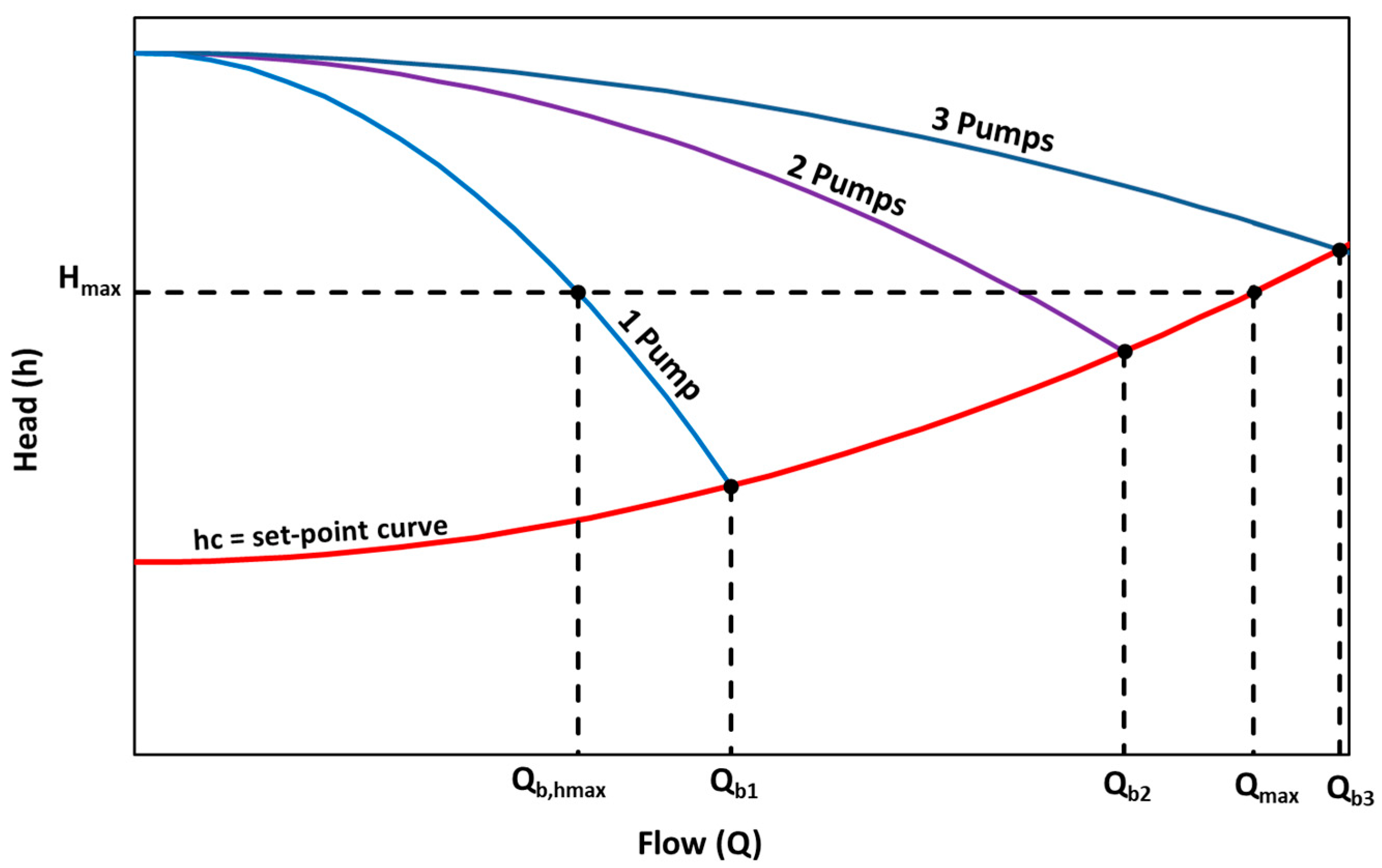
In the pumping control system of the classic method, the total number of pumps that that are calculated determines the number of flow operational ranges. These ranges are defined by the terms (
Qb1, Qbi, …,
Qbn), where the term
Qbi is the maximum flow that can be supplied when there are
i pumps in operation if the control system pretends that the head added by the pump is the same at the required head of the set-point curve. In other words,
Qbi is the intersection between the set-point curve and the head curve of
i pumps. In this way, the term
i take values from 1 to
n, where
n is the total number of pumps of the pumping station (
Figure 1). The term
Hmax refers to the total dynamic head when the demand flow is maximum (
Qmax).
In the classic method, when demand flow (Q) is in the range (0 < Q < Qb1), one pump supplies the flow demand at N rotational speed to follow the set-point curve, where N could have values from (0 < N < N0) and N0 corresponds to the nominal rotational speed. On the other hand, when the flow (Q) is in the second range (Qb1 < Q < Qb2), one pump operates at 100% of nominal speed (N0) and the second pump operates at a correspondent (N) rotational speed, thus it follows the set-point curve. Another alternative is that the two pumps operate at a same correspondent (N) rotational speed following the set-point curve. When the flow (Q) is in the range (Qb2 < Q < Qb3), two pumps work at 100% of nominal speed (N0) and the third pump works at a (N) rotational speed following the set-point curve. Other alternatives of operation in this last range are one pump works at 100% nominal speed (N0) and two pumps work at the same correspondent (N) rotational speed following the set-point curve, or three pumps operate at the same correspondent (N) rotational speed that follows the set-point curve.
The idea of this proposed methodology of pumping station design is to determine the optimal number of pumps and the optimal pumping configuration of the control system in every flow rate to minimize the energy. This methodology starts with a set-point curve of the system that determines the conditions of flow and head (Q, H) required at the end of the pump and with a set pump model. Using the operational flow range of the classic method, different pumping configurations are tested, combining FSPs and VSPs and calculating the consumed energy in every configuration to determine the optimal number of FSPs and VSPs in operation. These configurations are determined by adding a pump to the minimum required number of pumps until the minimum consumed energy is obtained. Finally, the results of energy of the different pumping configurations determine the optimal number of FSPs and VSPs in every flow rate.
In summary, the operational flow ranges and the number of required pumps of the control system of the classic method are used only as reference in this proposed methodology. In order for the methodology to be systematized for any pump model, the set-point curve and the characterized curves of the pump model are expressed in a dimensionless form, where these terms are in relation to the best efficient point of the pump.
Before describing the mathematical formulations and the process of this methodology, it is important to highlight several assumptions of this methodology. This methodology is adapted only to closed systems. However, this methodology could also be applied to elevated storage systems if it uses the head and the flow (H, Q) curves that could be supplied a pump as references. In addition, it is assumed that pumping stations are configurated in parallel and are equipped with pumps of the same characteristics. Another assumption is that the type of demand is for urban consumption and does not change through the time. Furthermore, it is assumed that the suction head of the pump is constant and does not change. It is important to mention that the main objective of this proposed control system is to determine the most suitable pumping configuration to obtain the optimal consumed energy. This work does not consider any kind of cost, including investment cost, operational cost, and maintenance cost, in the process of this methodology. In future studies, these costs could be considered for this proposed methodology of pumping station design.
2.2. Mathematical Formulation
The total dynamic head curve of a pump (
H) and the efficiency curve of a pump (
η) are in function of the flow (
Q). When a pump rotates with different rotation speeds, the total dynamic head curve and the efficiency curve are affected by the rotational speed that is defined by the term (
α). This term is the relation between the real rotational speed of the pump (
N) and the nominal speed (
N0). Taking as reference the affinity laws, both curves are expressed as the following expressions.
The terms H1, A, B, E, and F in the previous equations are coefficients that characterize the pump, and the term n is the number of pumps that conforms the pumping system.
The hydraulic power represents the energy of the pump when supplied with some flow with a certain head pressure. It is directly proportional to the specific weight of the water (γ), the flow rate (
Q), and the total dynamic head (
H). Even though the efficiency of the electrical motor could be between 90% and 95%, it is assumed that the mechanical power on the shaft (
Pa) is equal to the electrical power consumed by the motor-pump group (
P). This power includes the hydraulic power and the power losses on the transmission of the shaft. Therefore, the efficiency of a pump is defined as the relation between the hydraulic power and the shaft power. The relation between the consumed power of a pump (
P), the mechanical torque (
M), and the rotational speed of the shaft (
ω) are expressed in the following equation:
The methodology presented is based on expressing the equations of a pump in a dimensionless way, taking the BEP of the pump as a reference. Therefore, the reduced terms, including total dynamic head (
h), flow (
q), efficiency (
θ), mechanical torque (
β), and power (
π), are obtained by the relation between the values of these variables and the values of the BEP.
Taking as reference the affinity laws and the previously described terms, the head pressure curve and the efficiency curve in a dimensionless form are expressed as the following equations.
Before analyzing a pumping control system, is important to define the set-point curve. This curve references the demand flow (
Q) and the total dynamic head required (
Hc) to satisfy the minimum required pressure of the user’s demand at the critical node. The set-point curve is defined as the following expression.
The term Δ
H refers to the static head that is defined as the difference of elevations between the axis suction of the pump and the critical node and adding the minimum required pressure of the critical node. The term
R is a constant value because the type of demand does not change through time, is associated with the energy losses in the system, and is defined as the resistance of the flow presented in the pipelines. Finally, the term
c is an exponent that depends on the characteristic of the system. The terms
R and
c are obtained by a regression adjustment from the points (
Hc,
Q) of the set-point curve to the expression (12). Taking as reference the dimensionless terms in a pumping system, the dimensionless form of the set-point curve leads to
where the term
λ1 is defined as the relation between the static head (Δ
H) and the nominal head of the pump (
H0), and the term
r is associated with energy losses
R and the nominal point of the flow and the head of the pump (
Q0,
H0).
In order to design a pumping control system, it is important to determine the rotational speed (α) of the pump, thus the pumping system follows the set-point curve. This type of control system we named the flow control system, and it is the focus of this work. However, if the control system aims to maintain a constant head pressure in the pump station (pressure control system), the process is similar. This rotational speed is calculated in an iterative form by setting values of rotational speed on the pumping curve Equation (7) and the set-point curve (13) until the head pressure is the same on both equations.
In order to estimate the efficiency of a pump using a VFD, the affinity laws are used in the equation of the efficiency curve. As it was mentioned previously in the introduction, the affinity laws present an incongruence to calculate the efficiency [
39]. However, Coelho and Andrade-Campos [
41] proposed an expression that corrects the inaccuracy of the affinity laws. This expression (15) relates the real efficiency or the corrected efficiency (
η2) when the rotational speed of a pump is (
N2) and the estimated efficiency (
η1) when the rotational speed is (
N1). From equation (16), a correction factor f(α) is defined. This factor corrects the efficiency of the pump estimated by the affinity laws
On the other hand, the reduced mechanical torque (
β) could have values greater than the unit in some cases. In a VSP, a reduced mechanical torque (
βv) is defined by the relation between a VSP’s mechanical torque (
M) and the maximum torque of the pump (
Mmax). Thus,
βv is expressed as:
Additionally, the mechanical torque of the pump β and the torque of the VSP could be related through the following expression:
The term
βmax is the maximum reduced torque of a pump when the rotational speed is nominal (
α = 1) and the flow is (
q = qmax). Taking as reference the definition of
β, the term of
βmax is expressed as:
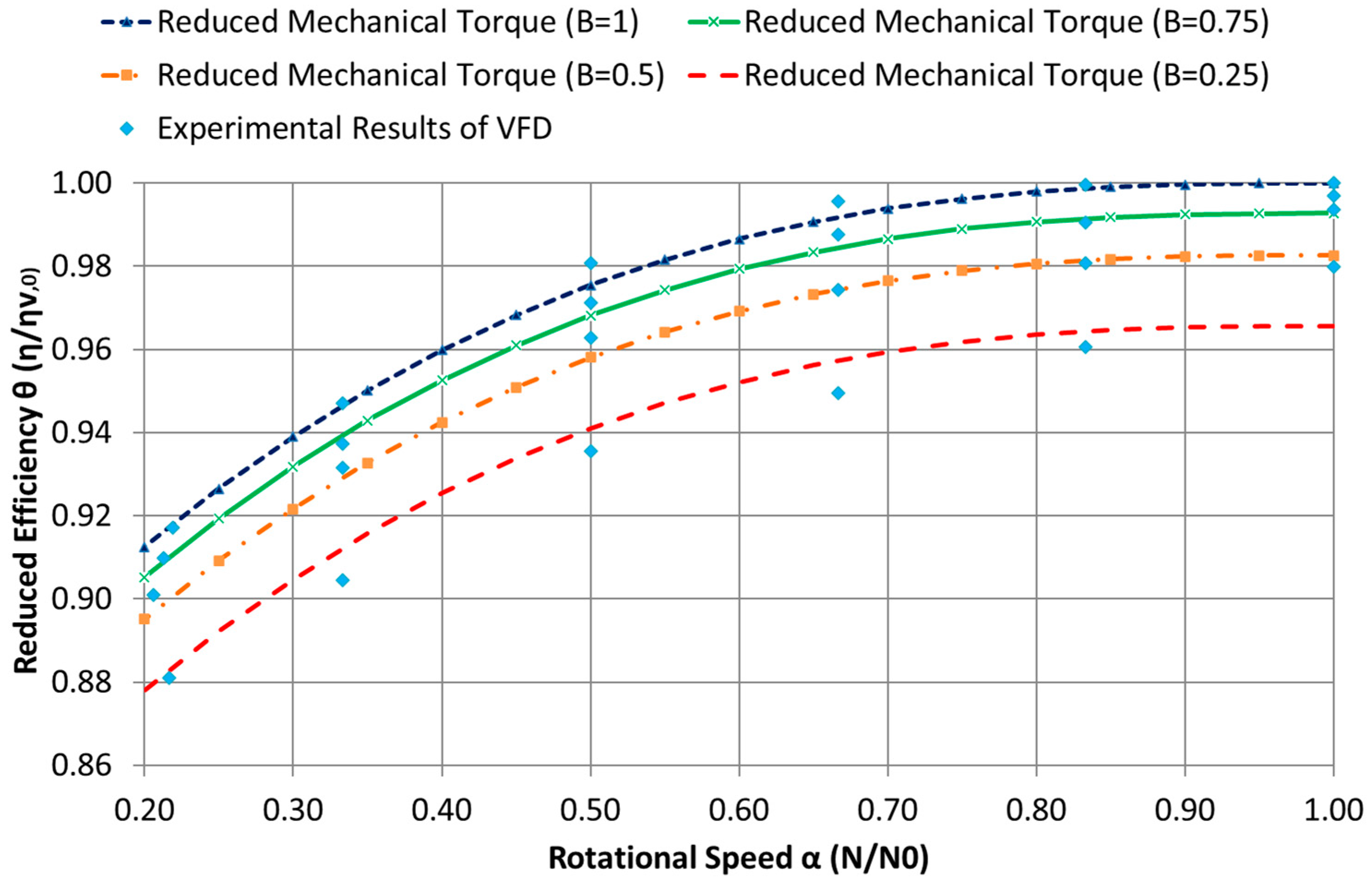
Another important aspect to consider in the energetic analysis of VSPs is the decrease of the efficiency system because of the frequency inverter performance. As it was mentioned in the introduction section, there are several works such as Europump and the Hydraulic Institute (2004) that analyze energy losses in the VFD device relating rotational speed and mechanical torque. They developed experimental essays of different frequency inverters, evaluating the performance with different mechanical torque and different rotational speeds. The aim of this methodology is to develop an expression that best adjusts to the experimental essays of Europump and the Hydraulic Institute [
42]. As a result, the expression that best adjusts to the performance essays is:
In this previous equation,
ηv is the performance of VFD. This value is determined by the mechanical torque of the VSP (
βv) and the rotational speed (
α). The coefficients that best fit the efficiency curve of frequency inverters essays realized by Europump and the Hydraulic Institute [
42] are obtained by regression adjustment from experimental tests. These values are
k1 = 0.025,
k2 = 0.16, and
k3 = 2.71. The
Figure 2 shows the adjustment of the developed expression by regression technics with the experimental essays of the VFD, where the horizontal axis represents the rotational speed (α) and the vertical axis represents the reduced efficiency of the VFD (θ
v). The different type of lines represents the adjustment curve of the efficiency of VFD for different reduced mechanical torque (β) and the points represent the experimental essays obtained from Europump and the Hydraulic Institute [
42].
The performance of the frequency inverter in a reduced form is expressed as the following expression:
Finally, the global efficiency of the pumping system (
ηc) and its reduced form (
θc) should be defined considering the correction of the inaccuracy of the estimated efficiency and the performance of the frequency inverter. Mathematically, they can be expressed as:
The total consumed energy of a pumping system is expressed as the following equation:
This last expression allows evaluating the consumed energy in dimensionless form for the different alternatives of pumping configuration for every flow range. Finally, this analysis determines the optimal number of FSPs and VSPs in operation that is the objective of the methodology.
2.3. Process of the Optimization Methodology
As it was previously explained in the mathematical formulations, the terms of the characteristic curves of the pump and the set-point curve are expressed in dimensionless forms that are in relation to the BEP of the pump. In this way, the flow of the optimization analysis of the pumping system is expressed in a reduced form (
q) that is the relation between the supplied flow and the nominal flow of the pump (
Q/Q0). In the same way, the total consumed energy is expressed in a reduced form (
) that is the relation between the consumed power of the pump and the nominal power of the pumps (
). In order to explain how the total operational range (
qmin < q < qmax) is expressed in this methodology, the following
Table 1 shows some examples of the limits of the operational range that are minimum demand flow (
Qmin) and maximum demand flow (
Qmax) and its equivalency in reduced terms (
qmin and
qmax) with different pump models.
This optimization process starts with a set pump model of the pumping station and the requirements of (Q, H) of the system (the set-point curve) and a set flow range (qmax < q < qmax). It is important to remind the reader that this process is focused with the control system that allows the pumping station to follow the set-point curve (flow control system). With these data, the minimum required number of pumps of the pumping station according to the classical method established is determined. It is obtained by the relation between the flow of the system and the flow that one pump supply with the maximum total dynamic head requires (Qmax/Qb,hmax).
Once the total number of pumps is obtained, the flow operational range of the pumping system is determined. It is important to remind the reader that the total number of pumps (Npumps) determines the same number of operational ranges in the classic method. In this way, every operational range is set by the term i, where this term varies from 1 to Npumps, and every term of i determines the number of pumps in operation in every flow operational range. For example, if the number of pumps is three pumps, there are three operational ranges. In the first, the second, and the third operational range, there are one pump, two pumps, and three pumps in operation, respectively. In summary, this proposed methodology takes as reference the operational range of the classical method to analyze the optimal number of pumps and pumping configuration in every flow rate.
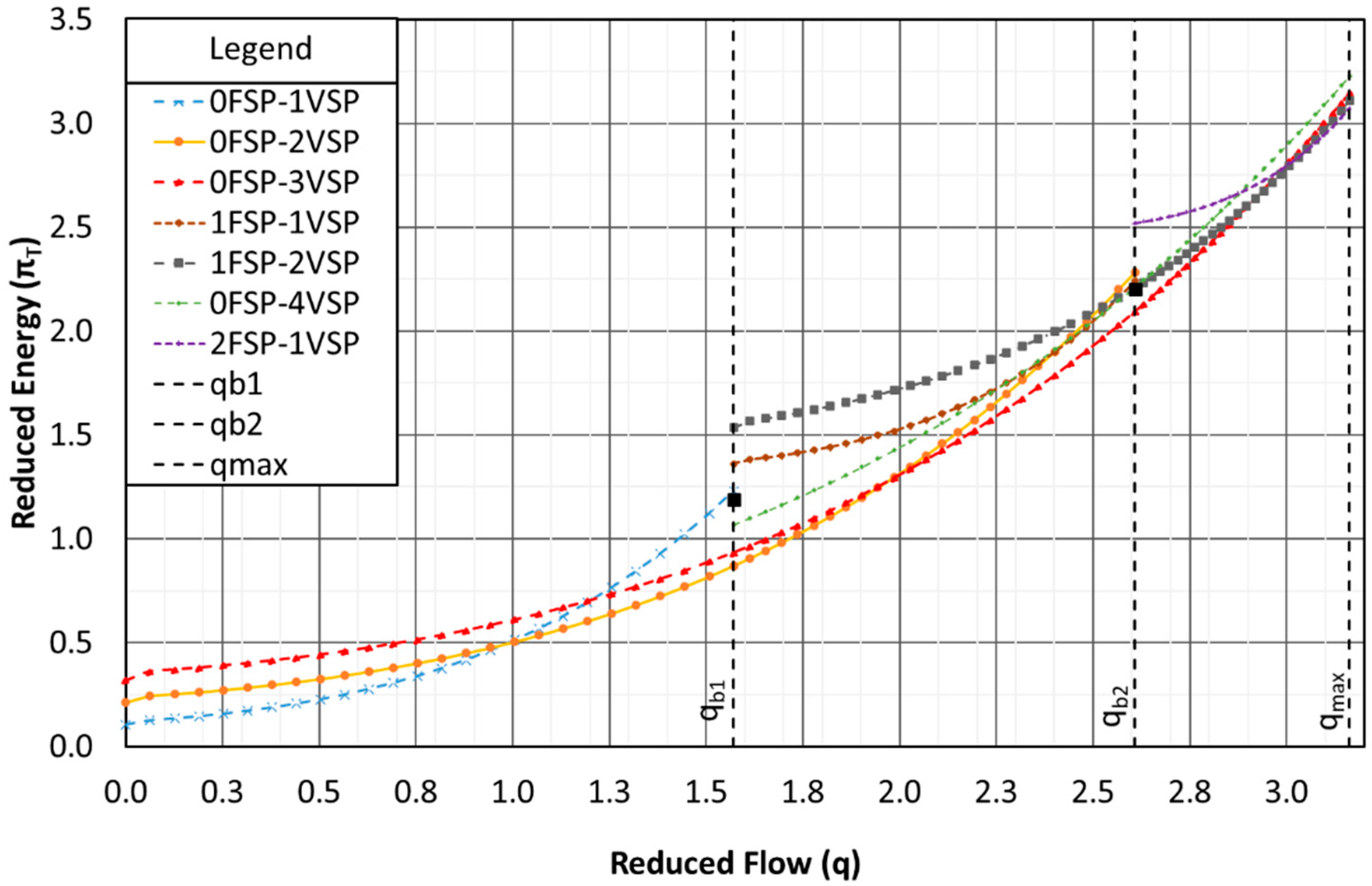
The next step is to set the number of pumps in study to the minimum required number of pumps. At this point, all the possible pumping configurations in operation with FSPs and VSPs are determined. For example, in the first range of operation, the only possibility of operation is 1 VSP. Conversely, it is not possible evaluate 1 FSP, because it exceeds the requirements of the systems and cannot follow the set-point curve. In the second range, the possibilities are 2 VSPs or 1 FSP with 1 VSP, whereas, in the third range, the possibilities are 3 VSPs or 1 FSP with 2 VSPs or 2 FSP with 1 VSP. Then, the energy for every pumping combination in every flow rate is evaluated and the minimum consumed energy is determined.
Once the consumed energy with the number of pumps in study is analyzed, the current number of pumps in study is incremented in a unit pump. With this incremental number of pumps, all the pumping combinations are determined once again and the consumed energy in every flow rate is evaluated. Then, the minimum consumed energy is determined.
If the minimum consumed energy with the current number of pumps is not incremented with respect to the last number of pumps, the current number of pumps is increased once more and the process is repeated. Nevertheless, if the minimum consumed energy of this increment of pumps is incremented with respect to the last number of pumps, the process is stopped, and the optimal number of pumps is the last number of pumps in study.
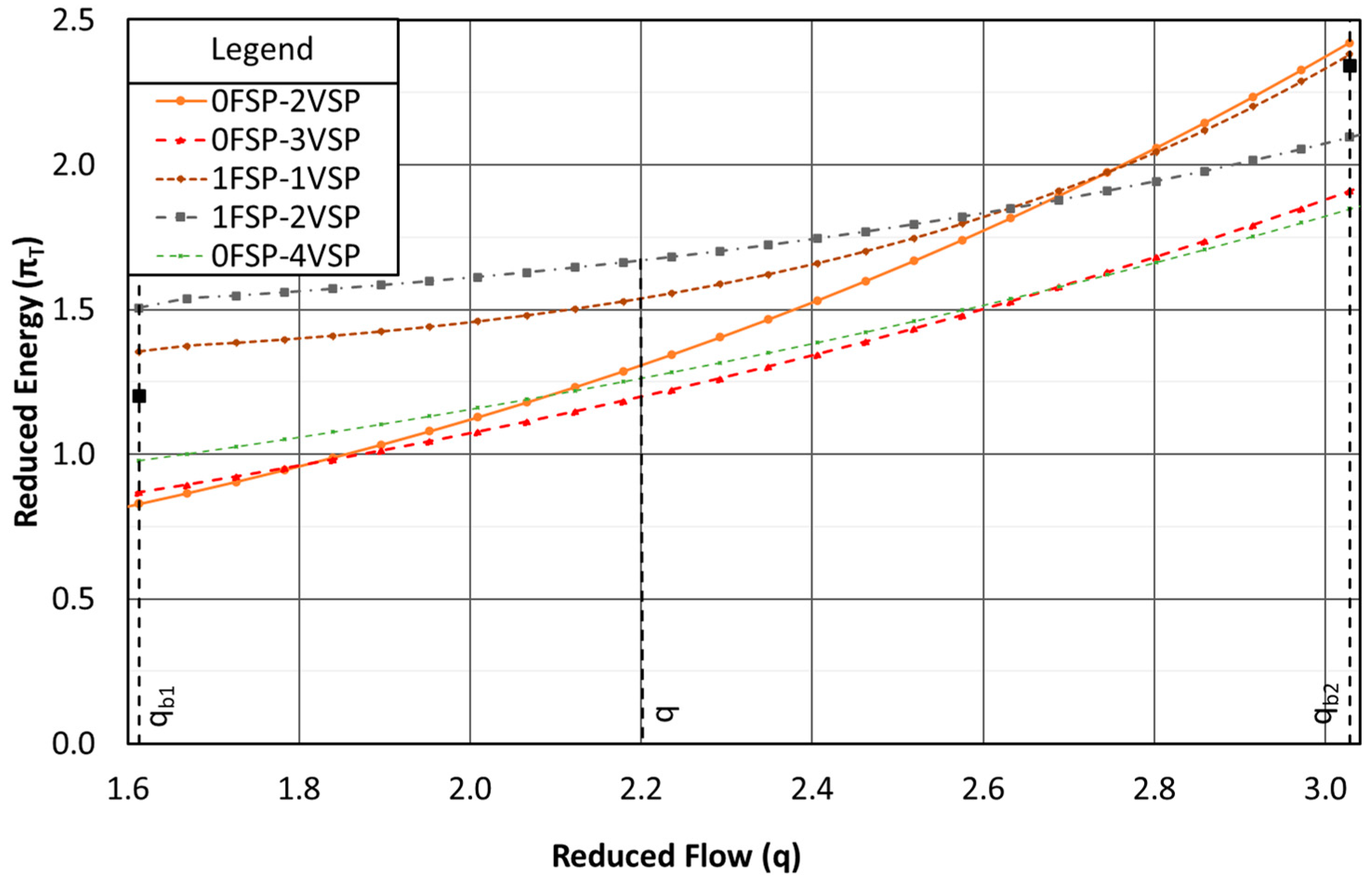
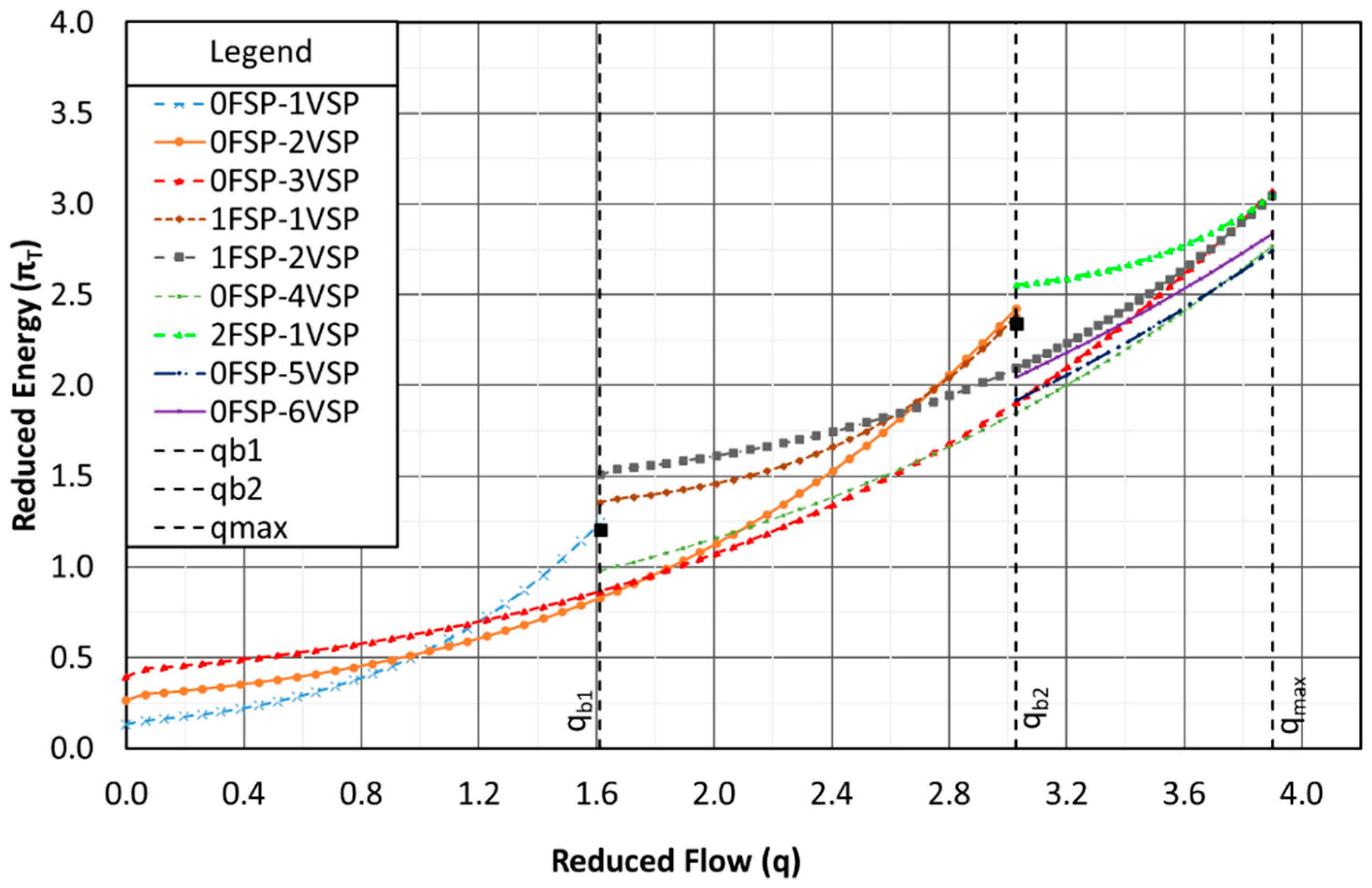
Figure 3 shows an example with a set flow of how the consumed energy evolves as different pumping combinations are evaluated. As an example, it is assumed that the calculated number of pumps for a set pump model is three pumps, thus there are three operational ranges.
Figure 3 shows different pumping combinations for the second range (
qb1 < q < qb2). For example, a reduced flow (
q = 2) is in the second range, the minimum required pumps is 2 pumps, and the possible combinations are 2 VSPs or 1 FSP with 1 VSP. Then, 3 and 4 pumps are added in this flow, and the possible combinations that are evaluated are 0 FSP-2 VSPs, 1 FSP-1 VSP, 0 FSP-3 VSPs, 1 FSP-2 VSPs, and 0 FSP-4 VSPs. There are more pumping combinations for 4 pumps, such as 1 FSP-3 VSPs. However, it is not necessary to evaluate this combination because the combination 1 FSP-2 VSPs is not optimal, and it is inferred that the combination 1 FSP-2 VSPs consumes more energy. In summary, it is observed in
Figure 3 that the optimal pumping combination in energy terms for a flow (
q = 2) is 0 FSP-3 VSPs.
5. Conclusions
Much of the scientific research on pump scheduling takes, as a starting point, a number of pumps previously set according to the classic system operation. This assumption could lead to not achieving the optimal result in terms of energy consumed in the PS because it has not been optimally designed. Another limitation presented by some studies on the operation of pumping stations is they do not consider the effect of the performance of the frequency inverters on the global efficiency of a pumping station when a VSP changes its rotational speed. In the best case, a constant efficiency of frequency inverter on the global efficiency is assumed. This may generate inaccuracy to determine the consumed energy of this pump, and it affects the PS global energy consumed. Therefore, the purpose of this present work is to discuss the classic system operation, determining the optimal number of pumps for every flow rate so that the consumed energy be optimal. Another contribution of this work is to consider that the efficiency of the frequency inverters of the VSPs varies depending on the load. In this way, the determination of the global energy optimum takes into consideration the efficiency of these devices.
The discussion about the classic operating system of a pumping station is relevant since different operating rules lead to lower energy consumption. Besides, it is important to analyze the optimal number of pumps for every flow rate because it determines the total number of pumps in an optimal pumping station design.
This study accomplishes the development of a methodology that analyzes how the pumping curve and the set-point curve influence the determination of the optimal number of FSPs and VSPs for each flow rate. The main idea of this methodology is to express the set-point curve and the pumping curve in a dimensionless form in relation to the BEP of the pump so that the methodology is more systematized to analyze different case studies. In this way, several pumping configurations are added and evaluated in energy terms to obtain the configuration with the minimum consumed energy.
The results obtained in both study cases allow us to conclude that the performance of a frequency inverter has a great influence on the global efficiency of a VSP, especially when the demand flow is close to the limits of the classic operational ranges (qb2, qb3, qmax). In fact, there could be cases where the consumed energy on VSP is higher than FSP. Therefore, a combination of FSPs and VSPs consumes lower energy than a configuration only with VSP.
The number of FSPs and VSPs in operation cannot be inferred in a simple form as is commonly done in the classic system. It requires a deep analysis on the control system, where the optimal number of pumps depends on several factors such as the BEP of the pump, the energy losses on the set-point curve, and how far or close the optimal head of the pump is to the maximum head of the set-point curve. For example, the optimal configuration of the pump of the TF network and the second and the third models pumps of the E1 network indicated that the total optimal number of pumps is the same as the minimum required pumps in the classic system. However, the optimal number of pumps in the first model pump of the E1 network is more than the minimum required in the classic system.
Furthermore, the minimum required pumps of a pumping system is not necessarily the best option in energy terms. In fact, the first pump model of the E1 network has an optimal number of pumps greater than the second and the third pump models, and at the same time, this first pump model is the best option in energy use. In summary, the total number of pumps associated with a pump model in a pumping station is not necessarily a decisive factor to determine the best alternative in energy terms, but it requires a deep analysis in the control pumping system configuration.
One limitation of this proposed methodology is that the set-point curve expression is adapted to closed networks. However, the general procedure of this methodology is similar to networks with a storage system. Another limitation is that the pumping curve, the pump efficiency curve, and the set-point curve are adjusted in exponential expressions. Despite this, this methodology is valid to be applied in any case study of pumping station designs. Furthermore, the expression of frequency inverter efficiency is adjusted according to experimental works that were previously mentioned in the methodology section. However, this expression is still valid to be considered on the analysis of pumping station operation.
Future research will be to develop a methodology to select the most suitable pump model for a pumping station design including this newly proposed control system operation. Besides, it will consider investment cost, operational cost, and maintenance cost in order to appropriately design a pumping station.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}