
Improving Accuracy and Robustness of Space-Time Image Velocimetry (STIV) with Deep Learning


Abstract
1. Introduction
2. Outline of STIV
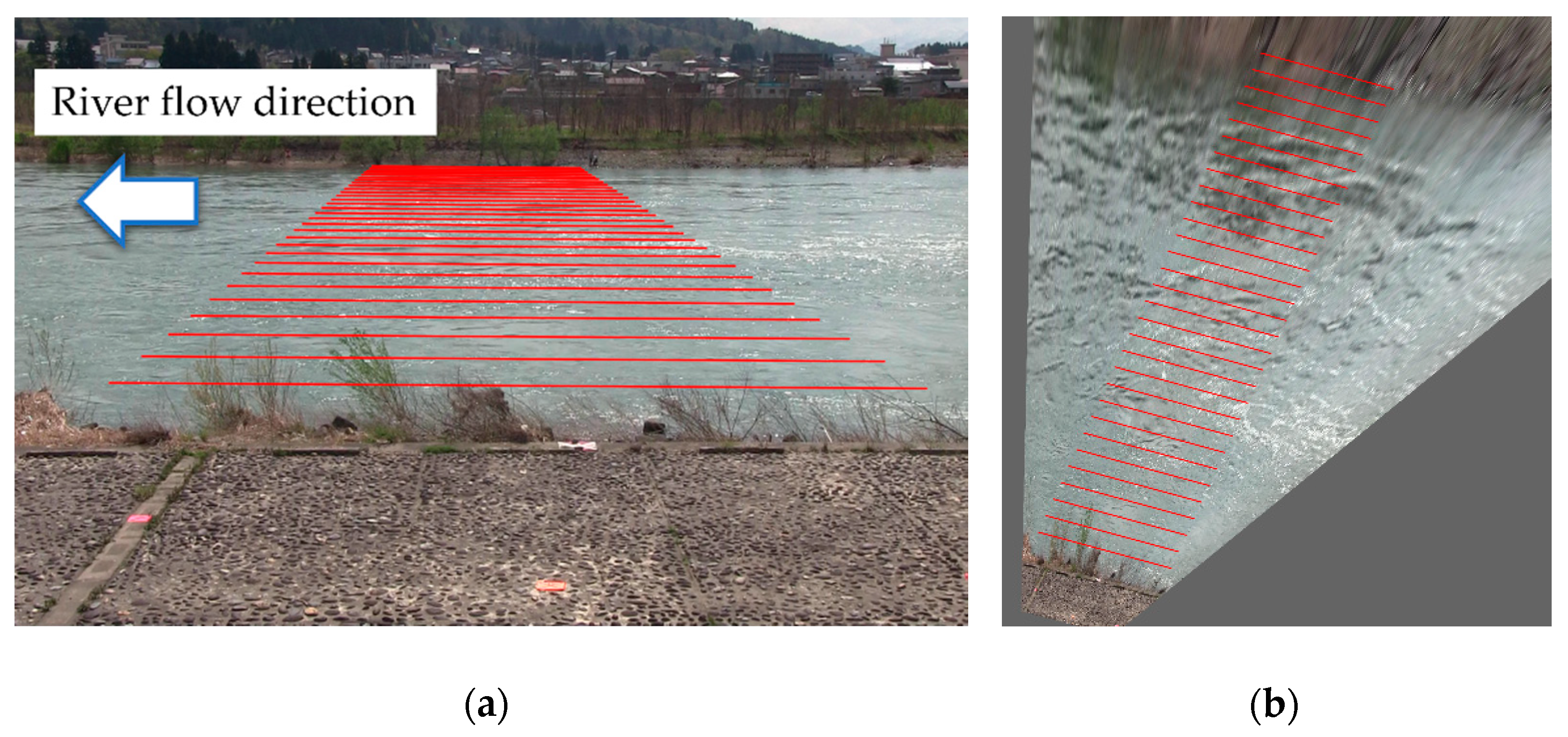
2.1. Image Analysis Procedure of STIV
2.2. Conventional STIV Methods
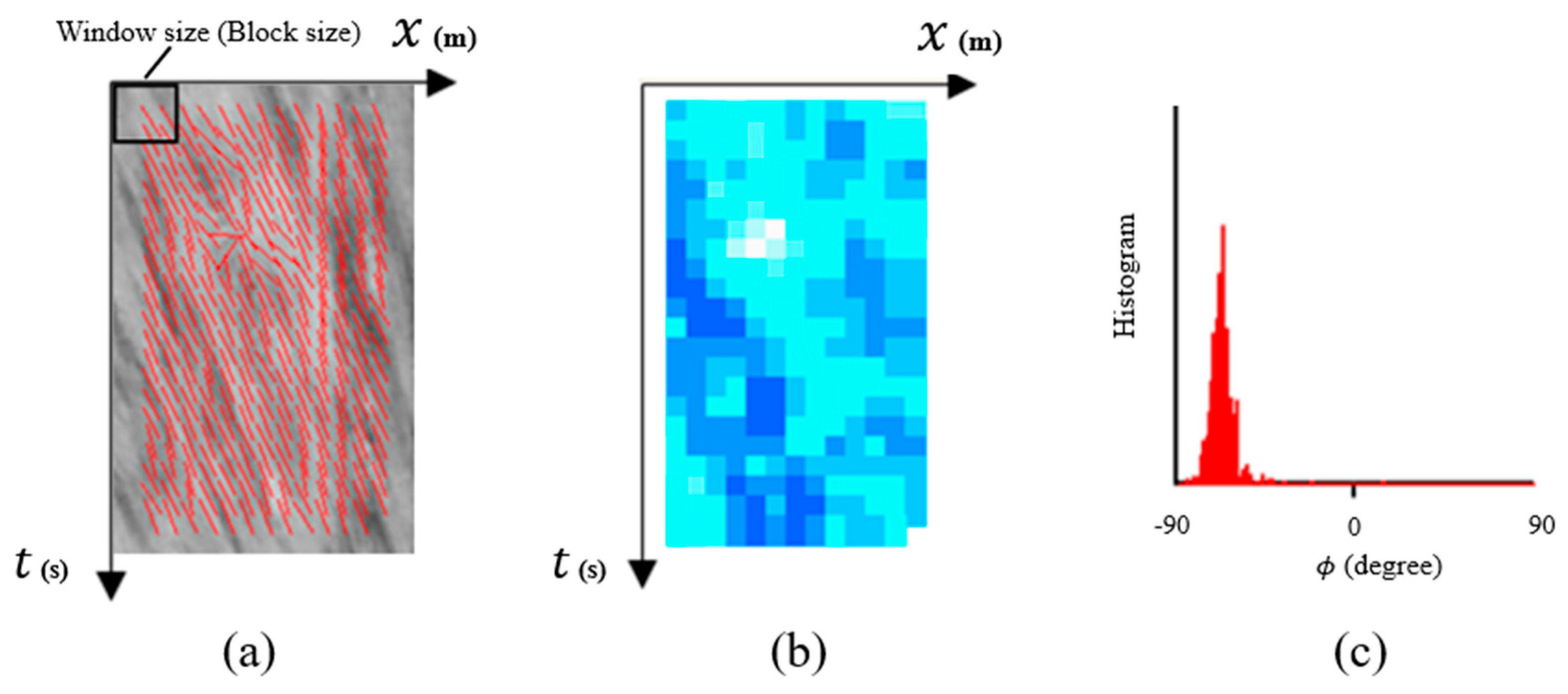
2.2.1. Gradient Tensor Method
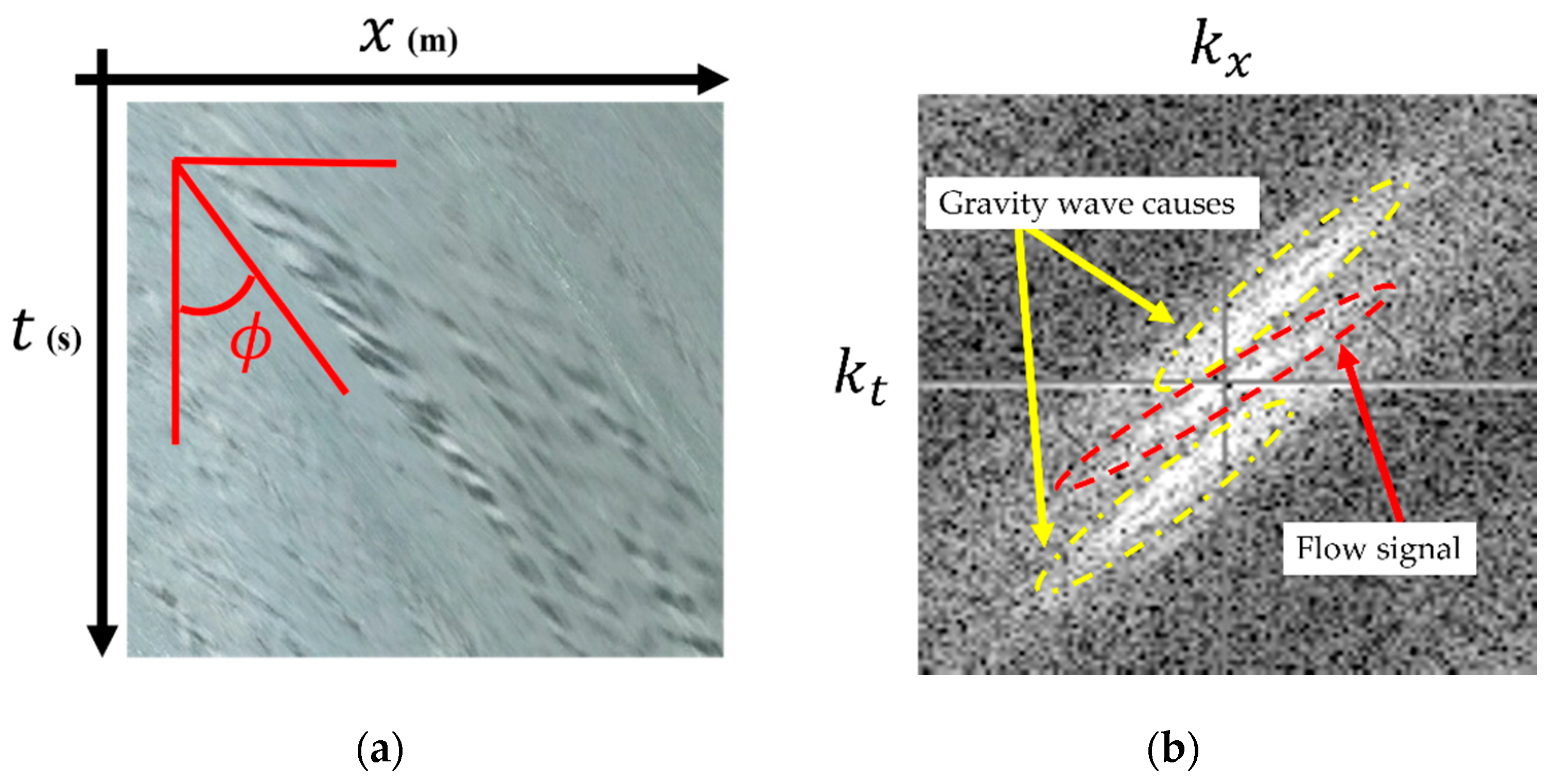
2.2.2. Fourier Predominant Angular Analysis Method
3. Automatic Detection of STI Pattern Gradients by Deep Learning
3.1. Outline of Deep Learning
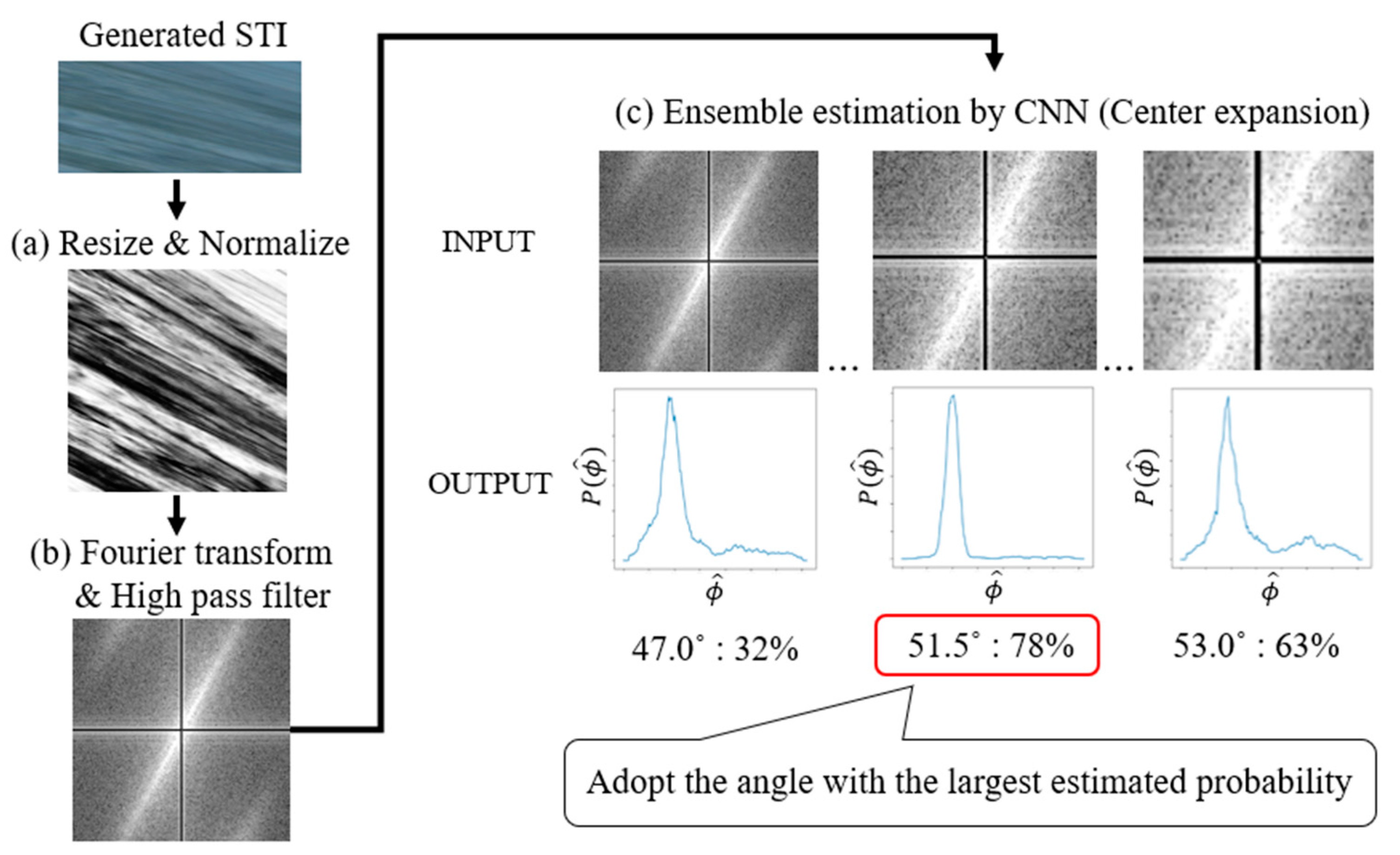
3.2. Application of CNN to a STI Pattern Gradient Detection Problem
4. Experiments
4.1. Training the CNN with Synthetic STI Dataset
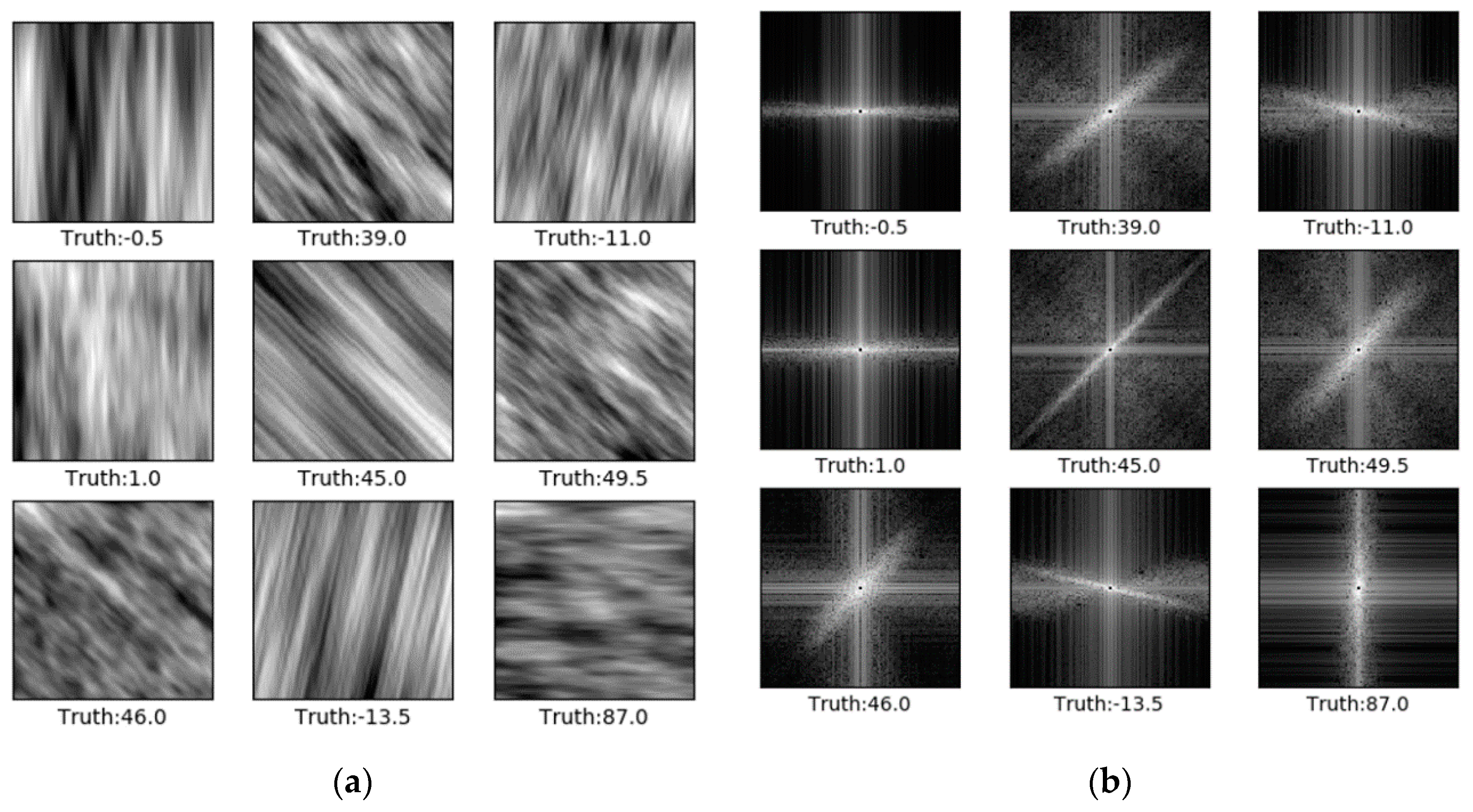
4.1.1. Generation of Synthetic Dataset
4.1.2. Deep Neural Network Structure and Learning Configurations
4.2. Application to Synthetic STI Dataset
4.3. Application to Categorized STI Dataset
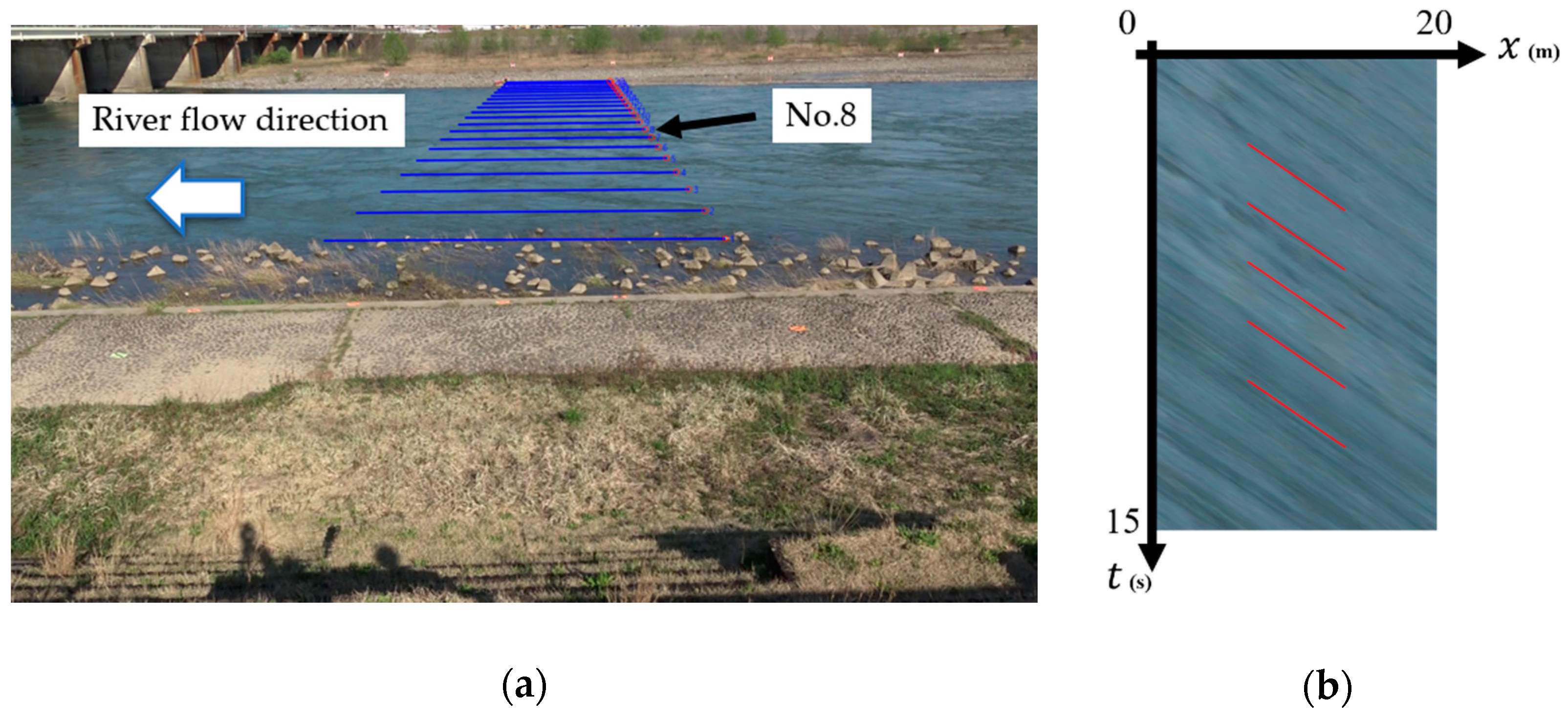
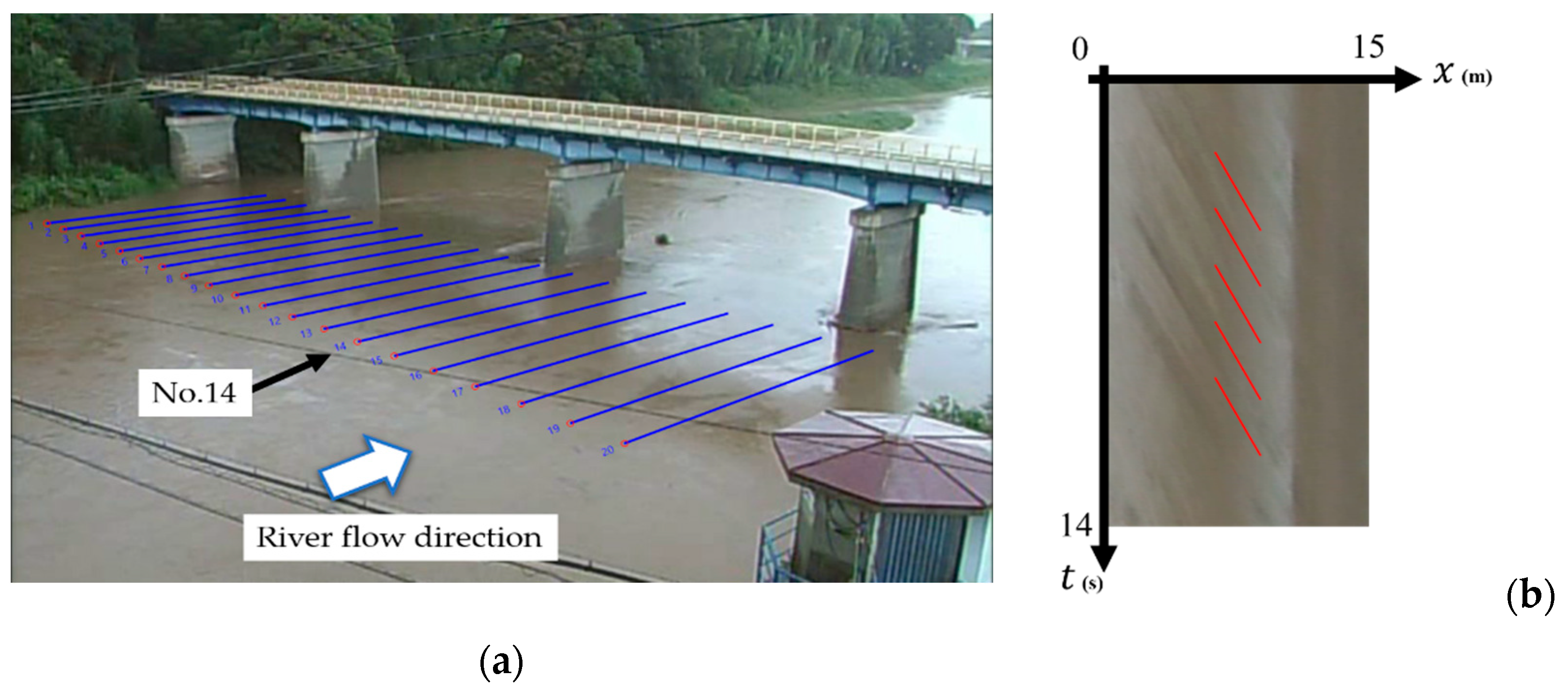
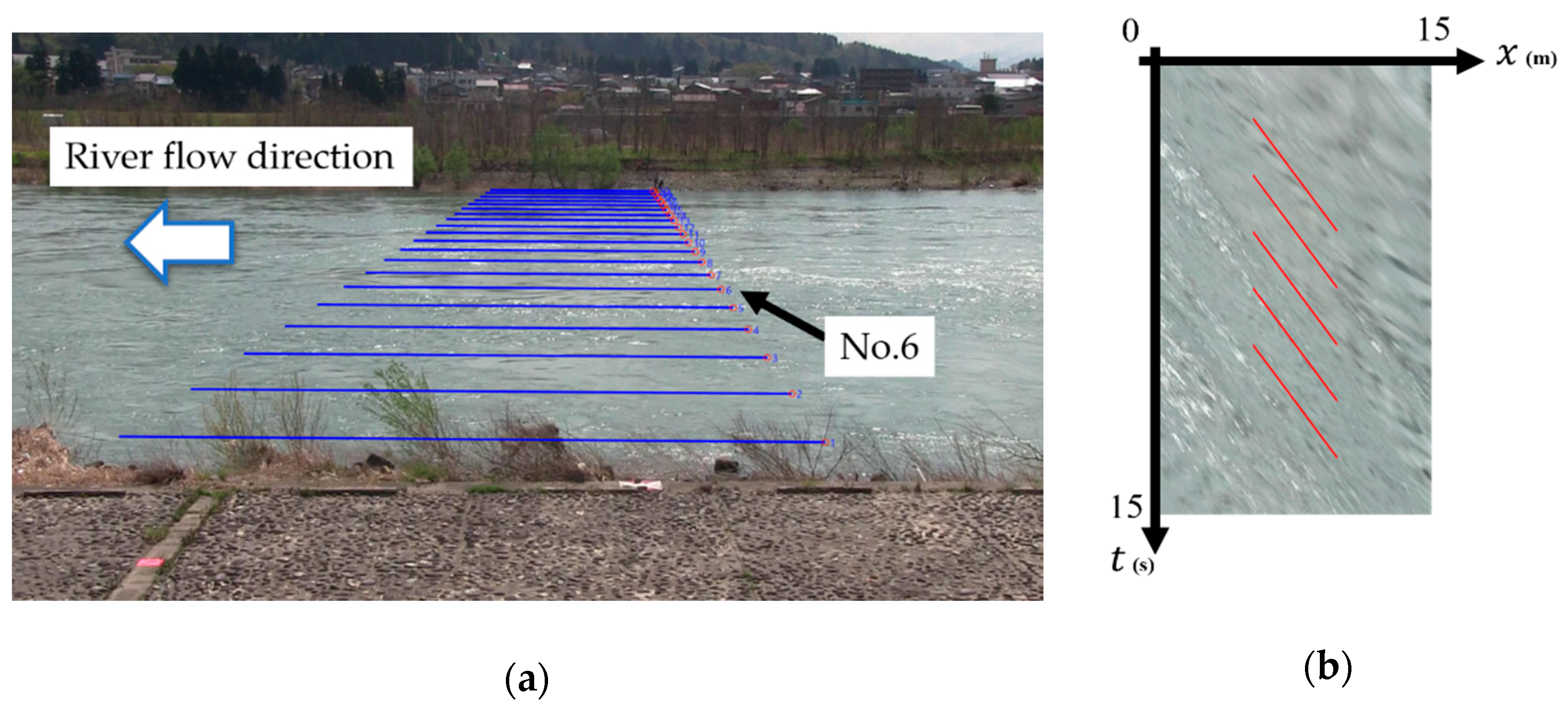
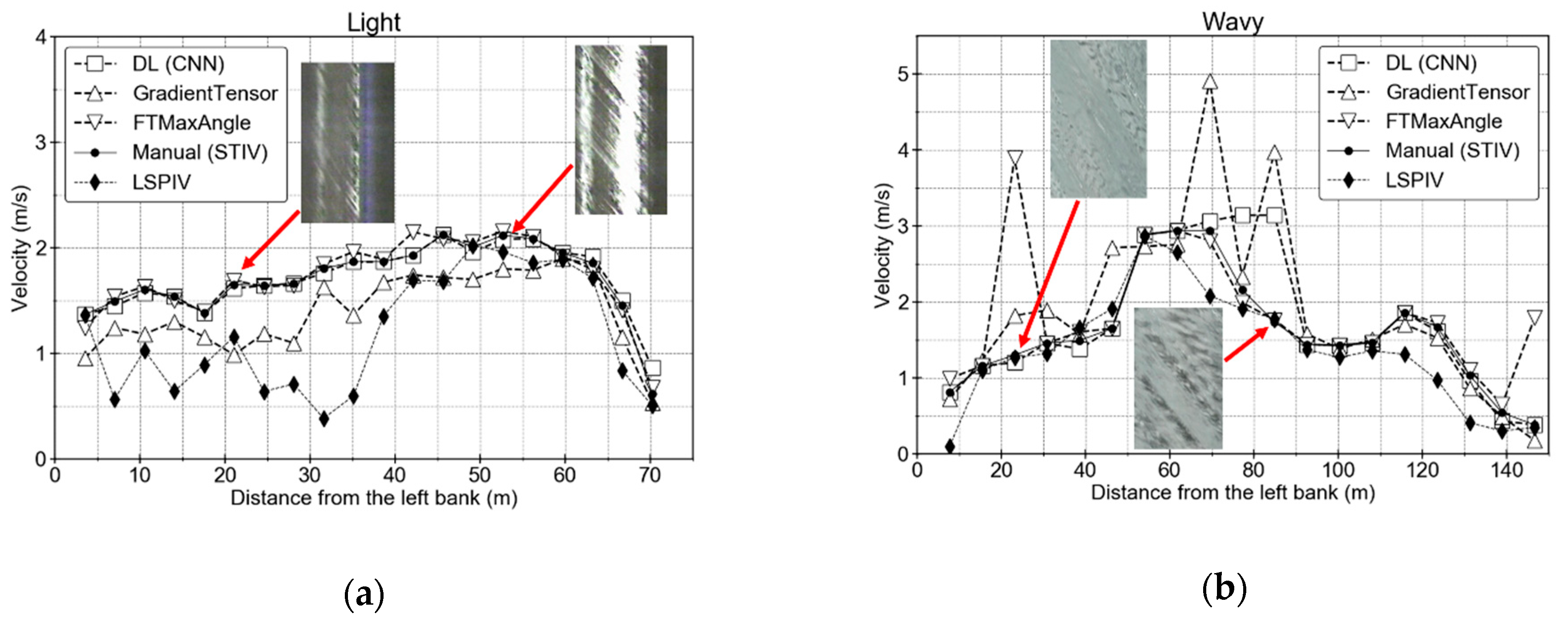
4.4. Application to River Flow Measurement
5. Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Shakti, P.C.; Nakatani, T.; Misumi, R. Hydrological Simulation of Small River Basins in Northern Kyushu, Japan, during the Extreme Rainfall Event of July 5–6, 2017. J. Disaster Res. 2018, 13, 396–409. [Google Scholar] [CrossRef]
- Tominaga, A. Lessons Learned from Tokai Heavy Rainfall. J. Disaster Res. 2007, 2, 50–53. [Google Scholar] [CrossRef]
- Kazama, M.; Yamakawa, Y.; Yamaguchi, A.; Yamada, S.; Kamura, A.; Hino, T.; Moriguchi, S. Disaster report on geotechnical damage in Miyagi Prefecture, Japan caused by Typhoon Hagibis in 2019. Soils Found. 2021, 61, 549–565. [Google Scholar] [CrossRef]
- Nihei, Y.; Sakai, T. ADCP measurements of vertical flow structure and coefficients of float in flood flows. In Proceedings of the 32nd Congress of the International Association of Hydraulic Engineering and Research, Venice, Italy, 1–6 July 2007. [Google Scholar]
- Harada, Y.; Nihei, Y.; Sakai, T.; Kimizu, A. Fundamental study on measuring accuracy for flood discharge with floats. Annu. J. Hydraul. Eng. 2007, 51, 1081–1086. (In Japanese) [Google Scholar] [CrossRef][Green Version]
- The Innovative River Technology Project led by the Ministry of Land, Infrastructure, Transport and Tourism (MLIT) in Japan. Available online: https://www.mlit.go.jp/river/gijutsu/inovative_project/project4.html (accessed on 25 June 2021). (In Japanese).
- Muste, M.; Yu, K.; Spasojevic, M. Practical aspects of ADCP data use for quantification of mean river flow characteristics; Part I: Moving-vessel measurements. Flow Meas. Instrum. 2004, 15, 1–16. [Google Scholar] [CrossRef]
- Muste, M.; Yu, K.; Pratt, T.; Abraham, D. Practical aspects of ADCP data use for quantification of mean river flow characteristics; Part II: Fixed-vessel measurements. Flow Meas. Instrum. 2004, 15, 17–28. [Google Scholar] [CrossRef]
- Oberg, K.; Mueller, D.S. Validation of Streamflow Measurements Made with Acoustic Doppler Current Profilers. J. Hydraul. Eng. 2007, 133, 1421–1432. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Niizato, K. Flood discharge observation using radio current meter. Proc. Jpn. Soc. Civ. Eng. 1994, 497, 41–50. (In Japanese) [Google Scholar]
- Welber, M.; Le Coz, J.; Laronne, J.B.; Zolezzi, G.; Zamler, D.; Dramais, G.; Hauet, A.; Salvaro, M. Field assessment of noncontact stream gauging using portable surface velocity radars (SVR). Water Resour. Res. 2016, 52, 1108–1126. [Google Scholar] [CrossRef]
- Muste, M.; Fujita, I.; Hauet, A. Large-scale particle image velocimetry for measurements in riverine environments. Water Resour. Res. 2008, 44, 1–14. [Google Scholar] [CrossRef]
- Fujita, I. Discharge Measurements of Snowmelt Flood by Space-Time Image Velocimetry during the Night Using Far-Infrared Camera. Water. 2017, 9, 269. [Google Scholar] [CrossRef]
- Hauet, A.; Creutin, J.-D.; Belleudy, P. Sensitivity study of large-scale particle image velocimetry measurement of river discharge using numerical simulation. J. Hydrol. 2008, 349, 178–190. [Google Scholar] [CrossRef]
- Fujita, I.; Kawamura, Y. Discharge Measurements of Flood Flow by Imaging Technology and Float Method. In Proceedings of the 29th Congress of IAHR, Beijing, China, 16–21 September 2001; Volume 1, pp. 1–6. [Google Scholar]
- Fujita, I.; Muste, M.; Kruger, A. Large-scale particle image velocimetry for flow analysis in hydraulic engineering applications. J. Hydraul. Res. 1998, 36, 397–414. [Google Scholar] [CrossRef]
- Muste, M.; Hauet, A.; Fujita, I.; Legout, C.; Ho, H.-C. Capabilities of Large-scale Particle Image Velocimetry to characterize shallow free-surface flows. Adv. Water Resour. 2014, 70, 160–171. [Google Scholar] [CrossRef]
- Khalid, M.; Pénard, L.; Mémin, E. Optical flow for image-based river velocity estimation. Flow Meas. Instrum. 2019, 65, 110–121. [Google Scholar] [CrossRef]
- Fujita, I.; Watanabe, H.; Tsubaki, R. Development of a non-intrusive and efficient flow monitoring technique: The space-time image velocimetry (STIV). Int. J. River Basin Manag. 2007, 5, 105–114. [Google Scholar] [CrossRef]
- Fujita, I.; Kumano, G.; Asami, K. Evaluation of 2D river flow simulation with the aid of image-based field velocity measurement techniques. River Flow. 2014, 1969–1977. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, H.; Liu, B.; Liu, W.; Xu, C.-Y.; Guo, S.; Wang, J. An improvement of the Space-Time Image Velocimetry combined with a new denoising method for estimating river discharge. Flow Meas. Instrum. 2021, 77, 101864. [Google Scholar] [CrossRef]
- Al-Mamari, M.; Kantoush, S.; Kobayashi, S.; Sumi, T.; Saber, M. Real-Time Measurement of Flash-Flood in a Wadi Area by LSPIV and STIV. Hydrology 2019, 6, 27. [Google Scholar] [CrossRef]
- Zhen, Z.; Huabao, L.; Yang, Z.; Jian, H. Design and evaluation of an FFT-based space-time image velocimetry (STIV) for time-averaged velocity measurement. In Proceedings of the 14th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Changsha, China, 1–3 November 2019. [Google Scholar] [CrossRef]
- Hydro-STIV. Available online: https://hydrosoken.co.jp/service/hydrostiv.php (accessed on 25 June 2021).
- Fujita, I.; Notoya, Y.; Tani, K.; Tateguchi, S. Efficient and accurate estimation of water surface velocity in STIV. Environ. Fluid Mech. 2018, 19, 1363–1378. [Google Scholar] [CrossRef]
- Fujita, I.; Shibano, T.; Tani, K. Application of masked two-dimensional Fourier spectra for improving the accuracy of STIV-based river surface flow velocity measurements. Meas. Sci. Technol. 2020, 31, 094015. [Google Scholar] [CrossRef]
- Fujita, I.; Deguchi, T.; Doi, K.; Ogino, D.; Notoya, Y.; Tateguchi, S. Development of KU-STIV: Software to measure surface velocity distribution and discharge from river surface images. In Proceedings of the 37th IAHR World Congress, Kuala Lumpur, Malaysia, 13–18 August 2017; pp. 5284–5292. [Google Scholar]
- Tani, K.; Fujita, I. Wavenumber-frequency analysis of river surface texture to improve accuracy of image-based velocimetry. E3S Web Conf. 2018, 40, 06012. [Google Scholar] [CrossRef]
- Yoshimura, H.; Fujita, I. Investigation of free-surface dynamics in an open-channel flow. J. Hydraul. Res. 2019, 58, 231–247. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Lin, M.; Chen, Q.; Yan, S. Network in network. In Proceedings of the 2nd International Conference on Learning Representations, ICLR, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. In Proceedings of the IEEE conference on computer vision and pattern recognition, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Tan, M.; Le, Q.V. Efficientnet: Rethinking model scaling for convolutional neural networks. In Proceedings of the 36th International Conference on Machine Learning (ICML 2019), Long Beach, CA, USA, 10–15 June 2019. [Google Scholar]
- Dolcetti, G.; Horoshenkov, K.; Krynkin, A.; Tait, S.J. Frequency-wavenumber spectrum of the free surface of shallow turbulent flows over a rough boundary. Phys. Fluids. 2016, 28, 105105. [Google Scholar] [CrossRef]
- Perlin, K. Improving noise. ACM Trans. Graph. (TOG) 2002, 21, 681–682. [Google Scholar] [CrossRef]
- Fudaa-LSPIV. Available online: https://forge.irstea.fr/projects/fudaa-lspiv (accessed on 25 June 2021).
- Le Coz, J.; Jodeau, M.; Hauet, A.; Marchand, B.; Le Boursicaud, R. Image-based velocity and discharge measurements in field and laboratory river engineering studies using the free Fudaa-LSPIV software. In Proceedings of the International Conference on Fluvial Hydraulics, River Flow 2014, Lausanne, Switzerland, 3–5 September 2014; pp. 1961–1967. [Google Scholar]
- Detert, M. How to Avoid and Correct Biased Riverine Surface Image Velocimetry. Water Resour. Res. 2021, 57, e2020WR027833. [Google Scholar] [CrossRef]
- Rozos, E.; Dimitriadis, P.; Mazi, K.; Lykoudis, S.; Koussis, A. On the Uncertainty of the Image Velocimetry Method Parameters. Hydrology 2020, 7, 65. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Setting Item | Value |
|---|---|
| Loss function | Cross entropy |
| Optimization algorithm | Adam |
| Learning rate | 0.0001 |
| Number of learning data | 36,000 (100/class) |
| Batch size | 32 |
| Number of learning epoch | 6 |
| Layer | Resolution I/O | Channel I/O | Kernel |
|---|---|---|---|
| Conv1 | 128/128 | 1/32 | 7 7 |
| Conv2 | 128/128 | 32/32 | 5 5 |
| MaxPool1 | 128/64 | 32/32 | 2 2 |
| Dropout1 | 64/64 | 32/32 | - |
| Conv3 | 64/64 | 32/64 | 5 5 |
| Conv4 | 64/64 | 64/64 | 3 3 |
| MaxPool2 | 64/32 | 64/64 | 2 2 |
| Dropout2 | 32/32 | 64/64 | - |
| Conv5 | 32/32 | 64/128 | 5 5 |
| Conv6 | 32/32 | 128/128 | 3 3 |
| MaxPool3 | 32/16 | 128/128 | 2 2 |
| Dropout3 | 16/16 | 128/128 | - |
| Conv7 | 16/16 | 512/512 | 5 5 |
| Conv8 | 16/16 | 512/512 | 3 3 |
| GAP | 16/1 | 512/512 | 16 16 |
| Dense | 1/1 | 512/360 | - |
| Conv1 | 128/128 | 1/32 | 7 7 |
| Tolerance | 0° | 0.5° | 1.0° | 1.5° | 2.0° |
| Accuracy | 33.0% | 80.2% | 97.0% | 99.5% | 99.9% |
| Case | Time Step | Orthorectified Image Pixel Scale | Interrogation Area Size (IA) | Search Area Size (SA) |
|---|---|---|---|---|
| Normal | 0.2 s | 0.05 m/pix | 60 0 pix (3 m2) | 40 pix (10 m/s) |
| Shadow | 0.1 s | 0.05 m/pix | 100 100 pix (5 m2) | 20 pix (10 m/s) |
| Light | 0.3 s | 0.05 m/pix | 100 100 pix (5 m2) | 30 pix ( m/s) |
| Wavy | 0.1 s | 0.05 m/pix | 60 0 pix (3 m2) | 10 pix ( m/s) |
| Case | DL (CNN) | Gradient Tensor | FTMaxAngle |
|---|---|---|---|
| Normal | 0.12 | 0.12 | 0.22 |
| Shadow | 0.06 | 0.39 | 1.15 |
| Light | 0.06 | 0.35 | 0.07 |
| Wavy | 0.40 | 0.75 | 0.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Watanabe, K.; Fujita, I.; Iguchi, M.; Hasegawa, M. Improving Accuracy and Robustness of Space-Time Image Velocimetry (STIV) with Deep Learning. Water 2021, 13, 2079. https://doi.org/10.3390/w13152079
Watanabe K, Fujita I, Iguchi M, Hasegawa M. Improving Accuracy and Robustness of Space-Time Image Velocimetry (STIV) with Deep Learning. Water. 2021; 13(15):2079. https://doi.org/10.3390/w13152079
Chicago/Turabian StyleWatanabe, Ken, Ichiro Fujita, Makiko Iguchi, and Makoto Hasegawa. 2021. "Improving Accuracy and Robustness of Space-Time Image Velocimetry (STIV) with Deep Learning" Water 13, no. 15: 2079. https://doi.org/10.3390/w13152079
APA StyleWatanabe, K., Fujita, I., Iguchi, M., & Hasegawa, M. (2021). Improving Accuracy and Robustness of Space-Time Image Velocimetry (STIV) with Deep Learning. Water, 13(15), 2079. https://doi.org/10.3390/w13152079