Roll Motion of a Water Filled Floating Cylinder—Additional Experimental Verification




Abstract
1. Introduction
2. Methodology
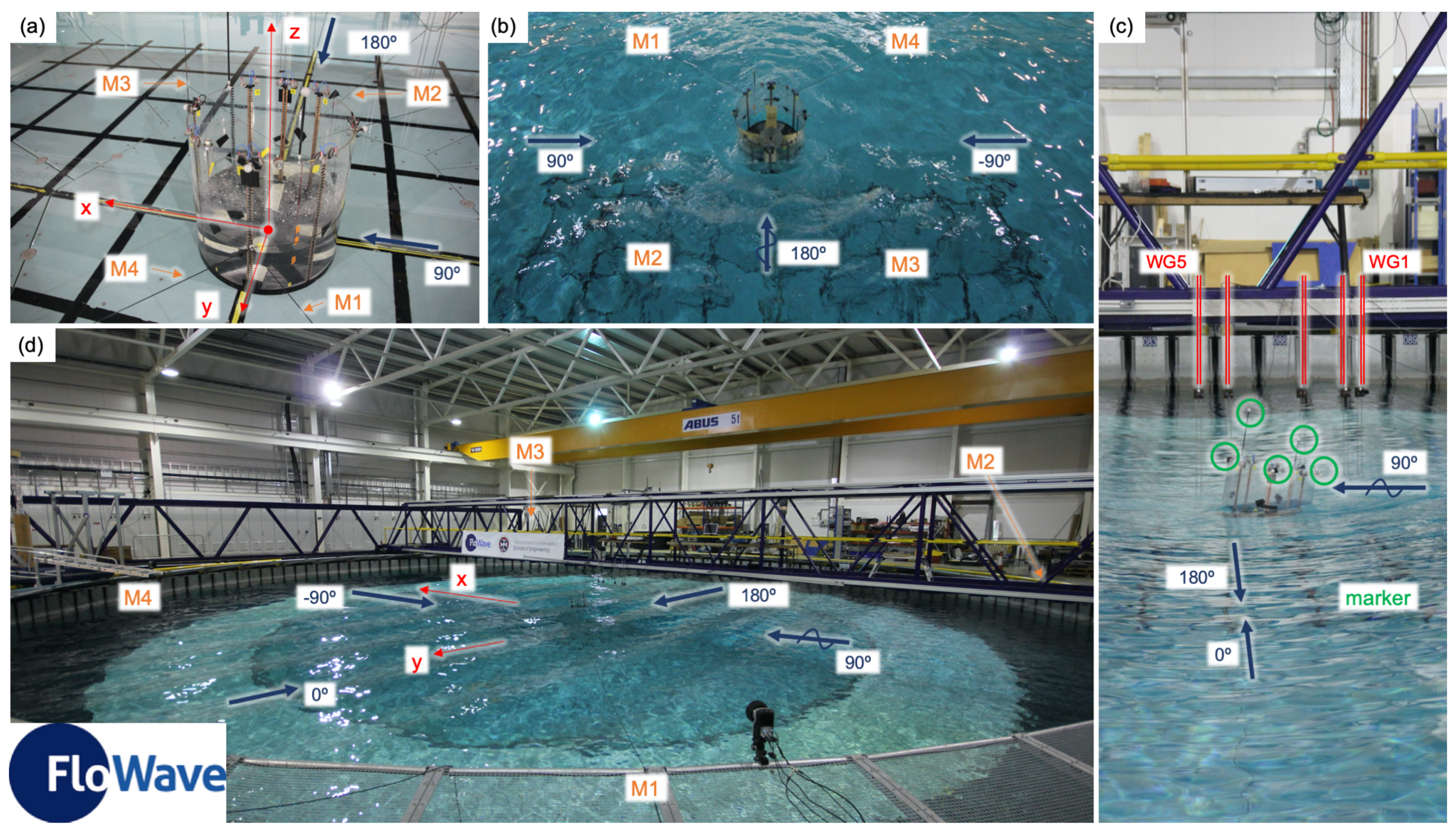
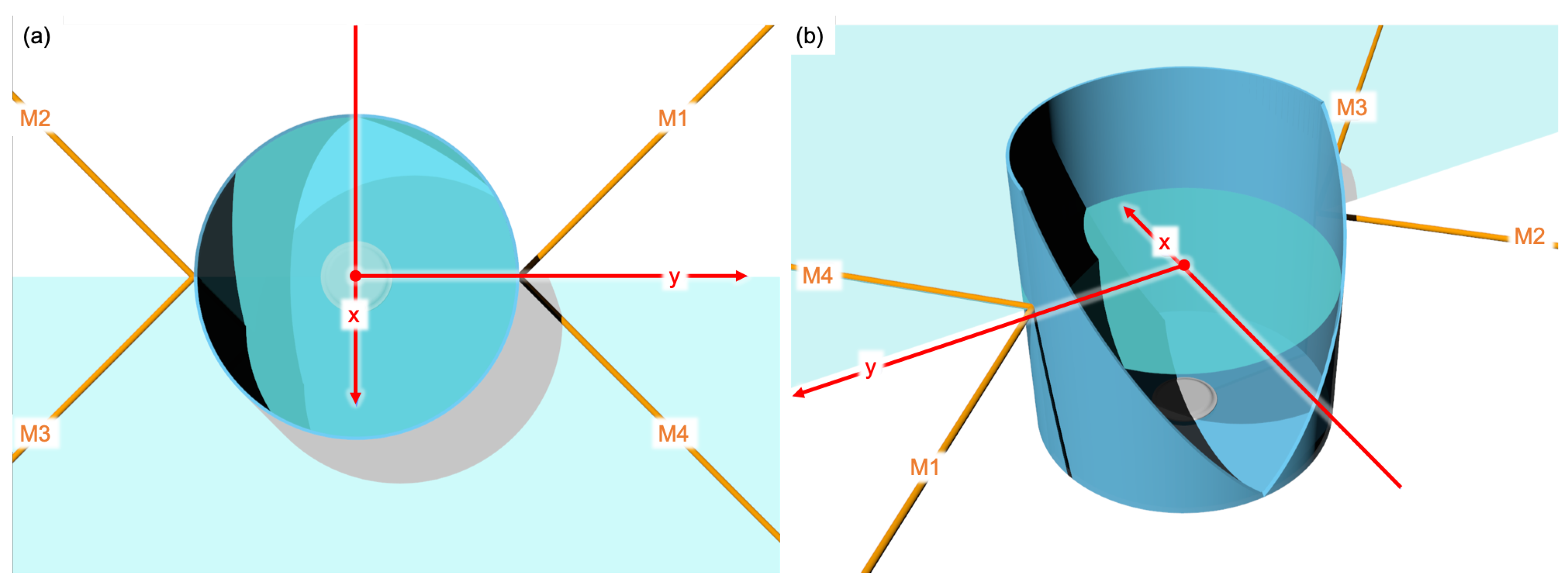
2.1. Experimental Set-up
2.2. Instrumentation
2.3. Experimental Conditions
3. Results
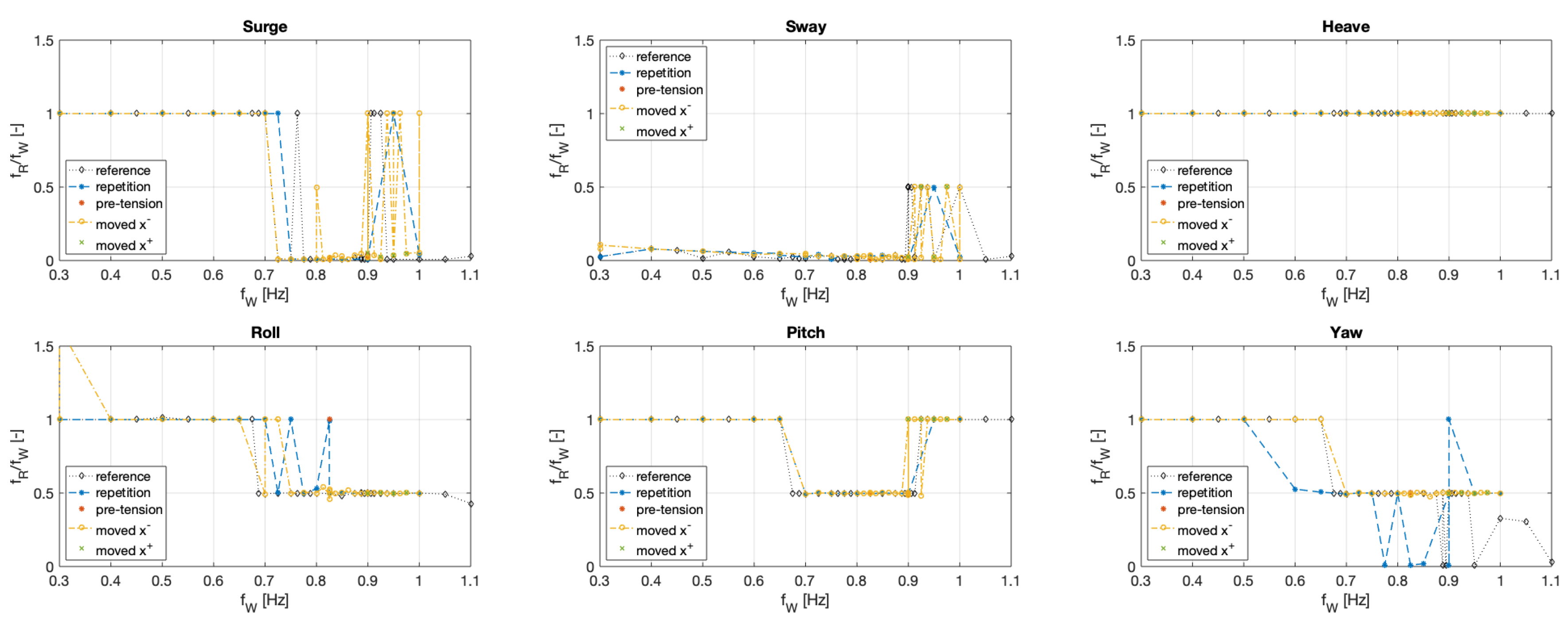
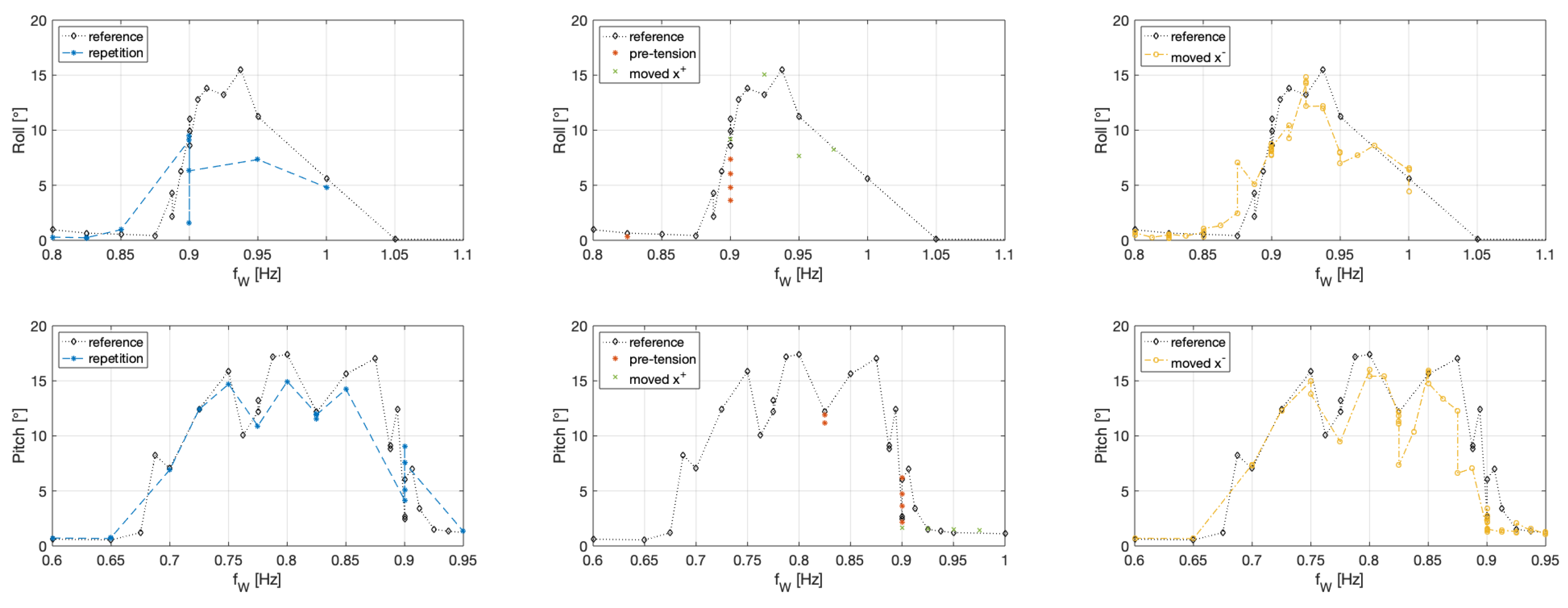
3.1. Overview
3.2. Position in the Tank
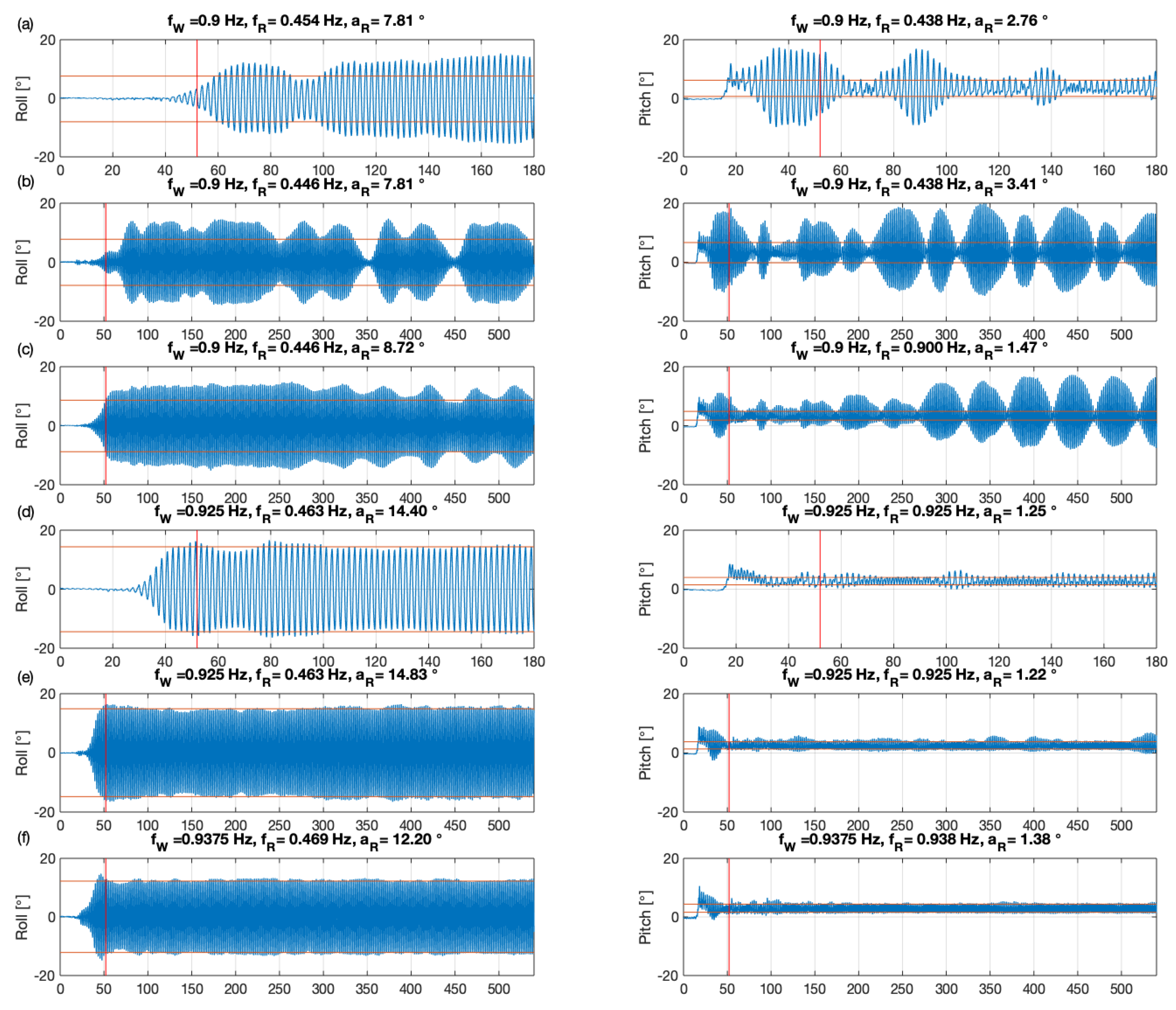
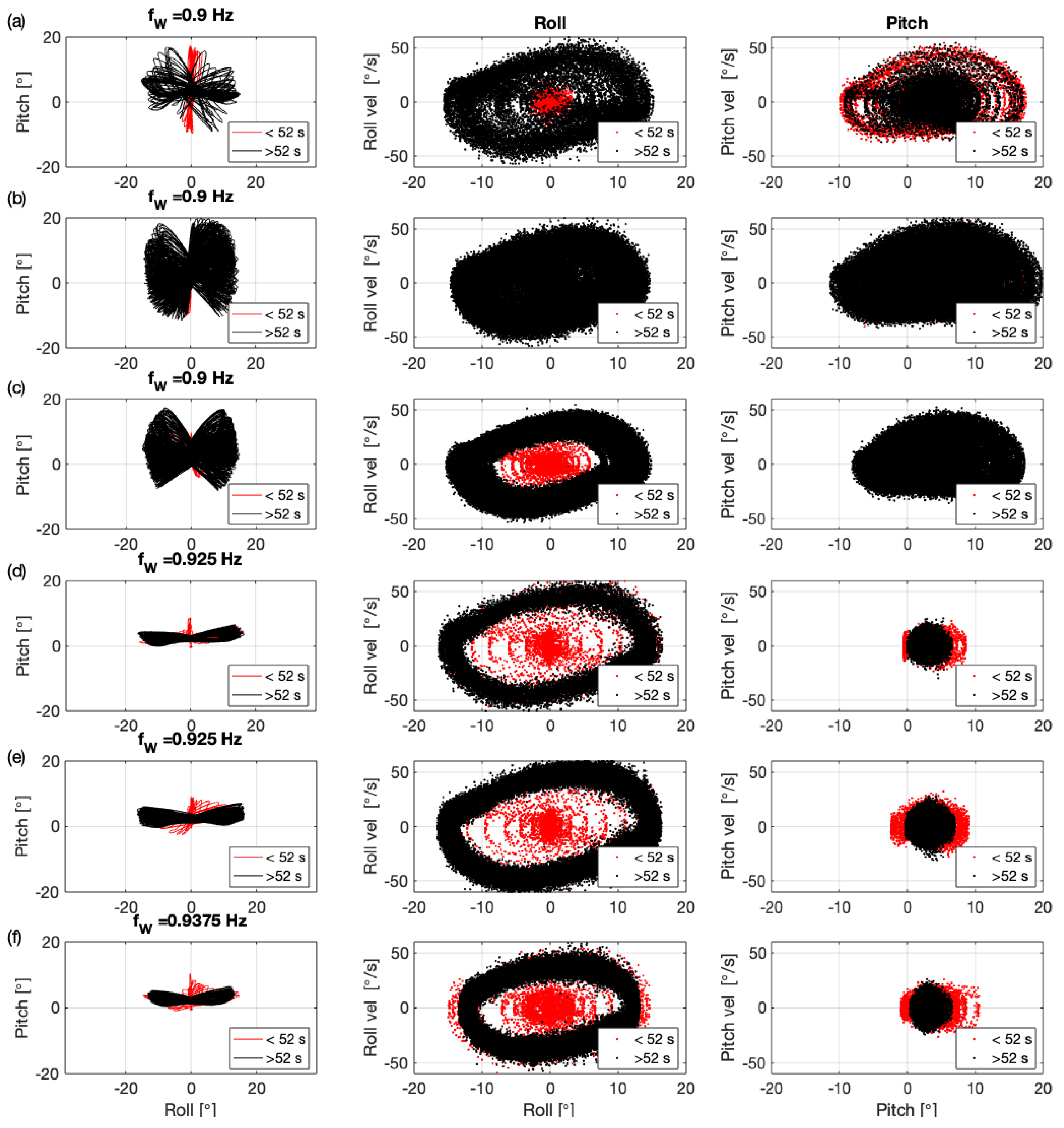
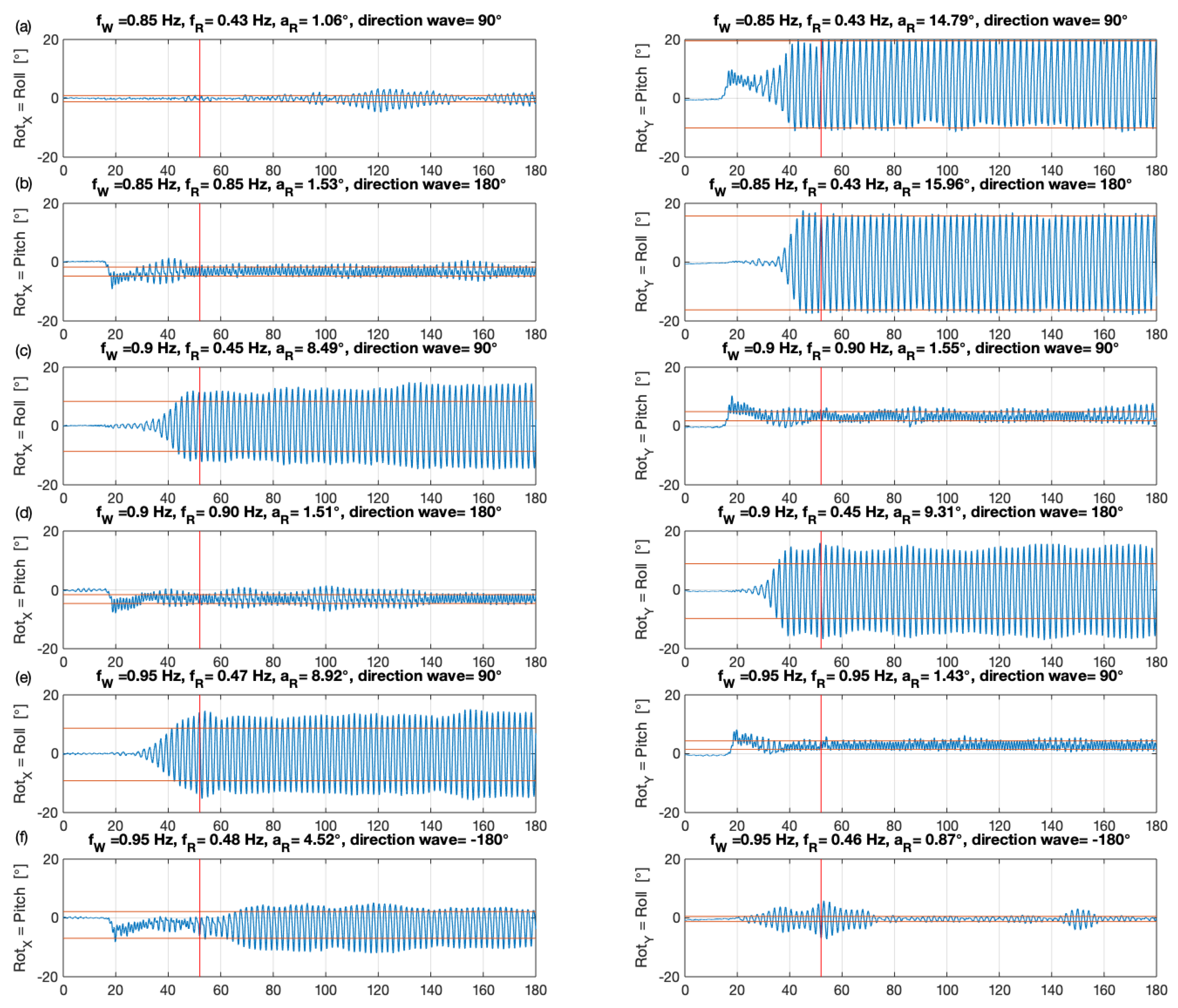
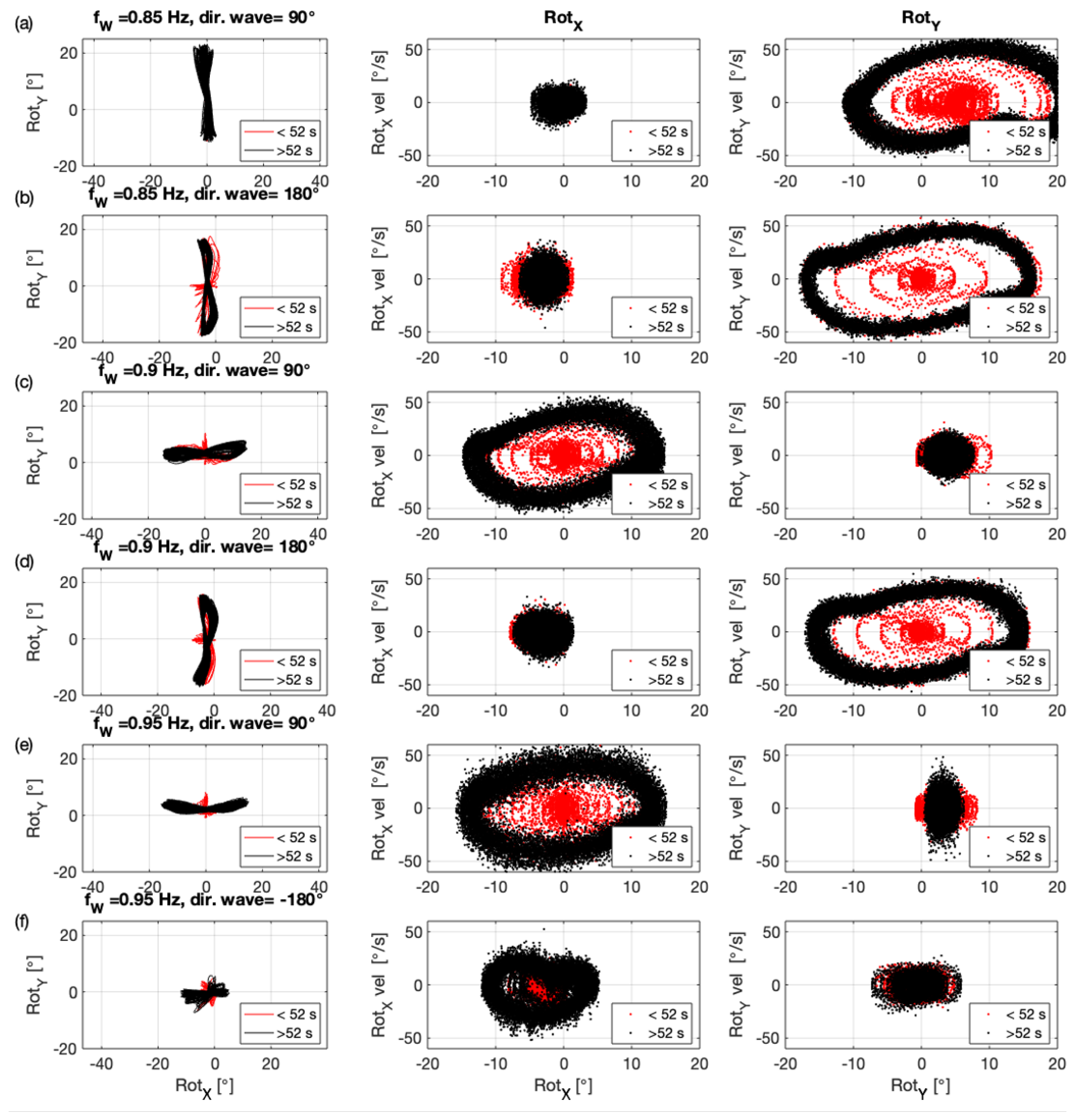
3.3. Length of the Test
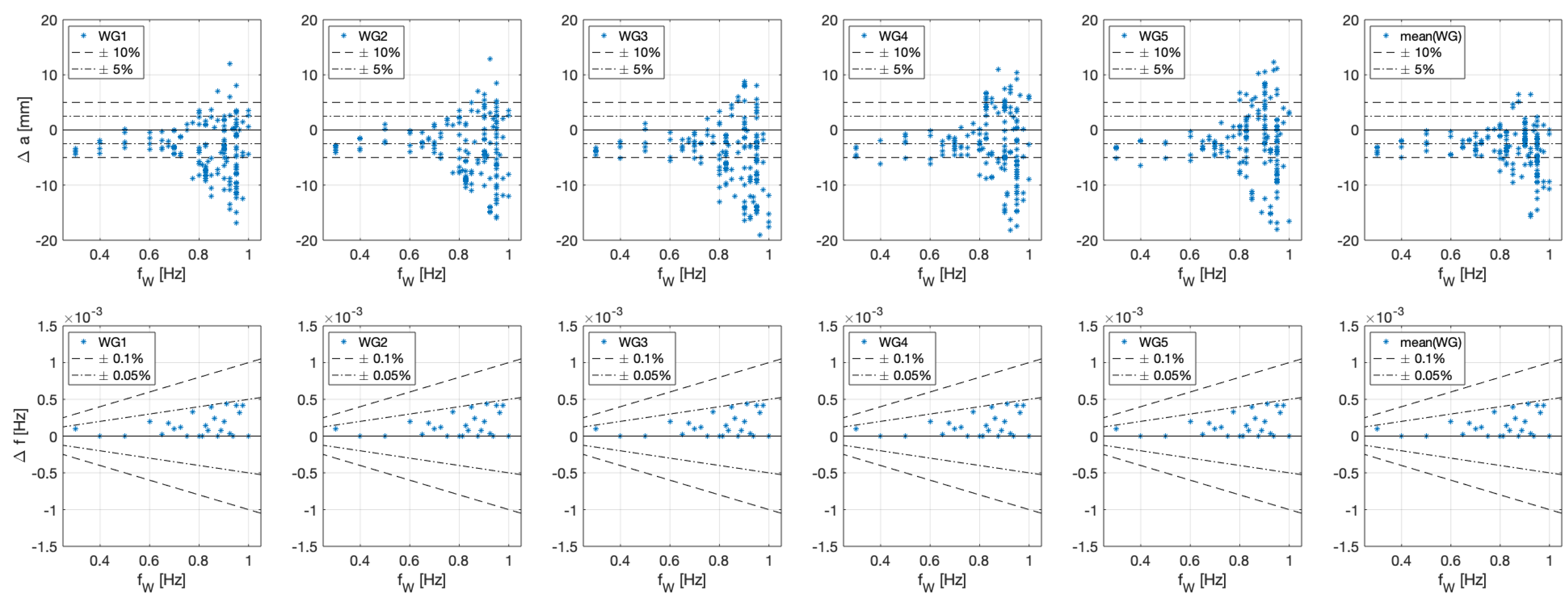
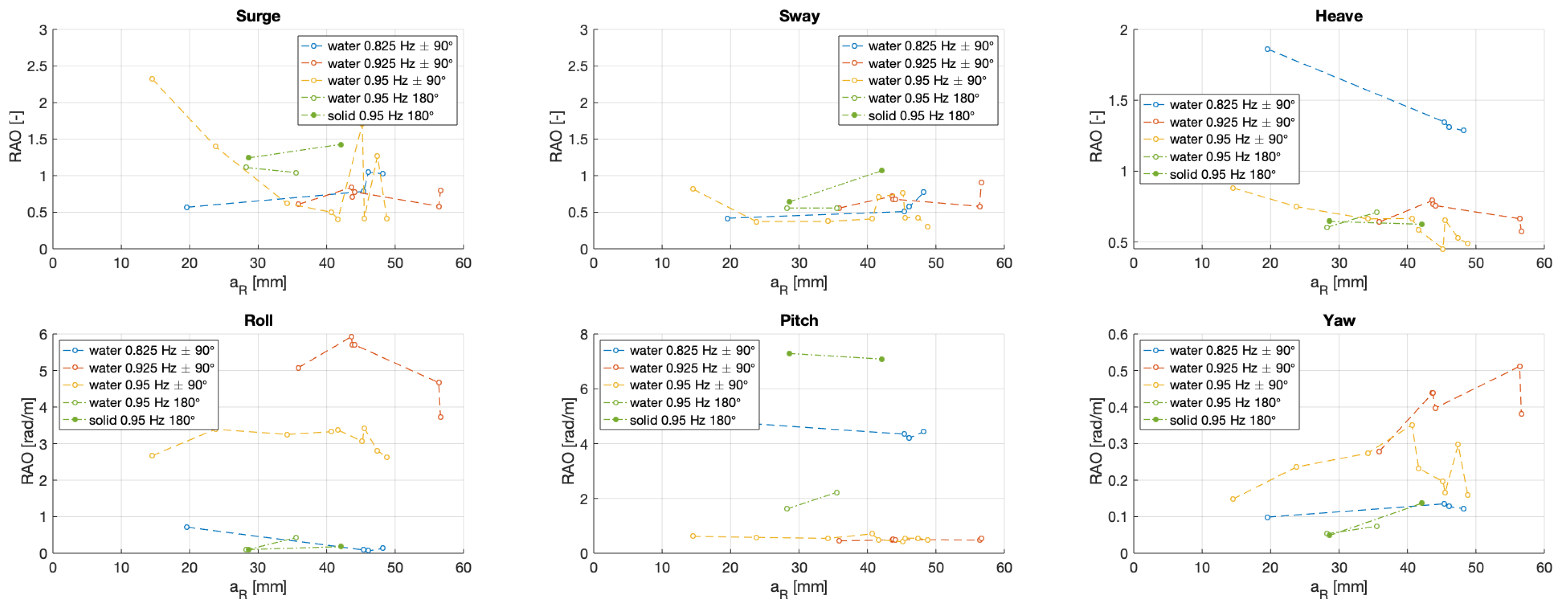
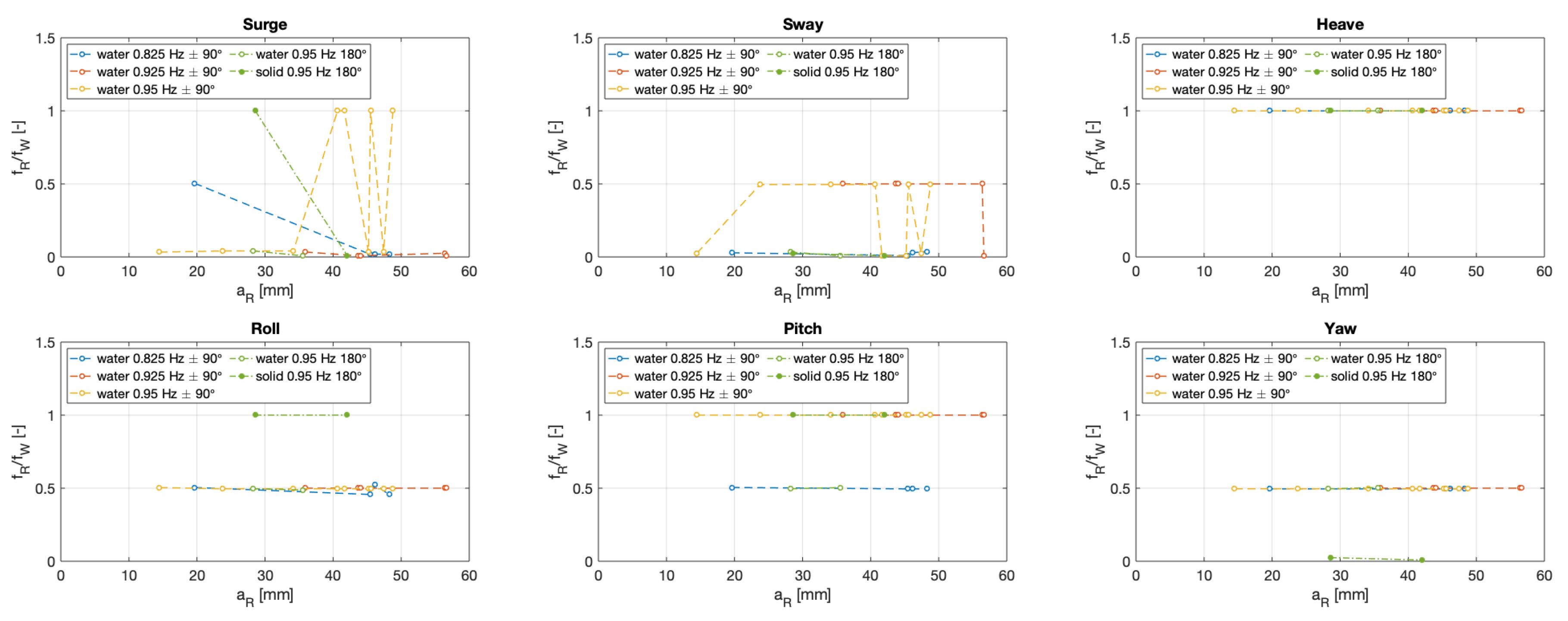
3.4. Wave Amplitudes
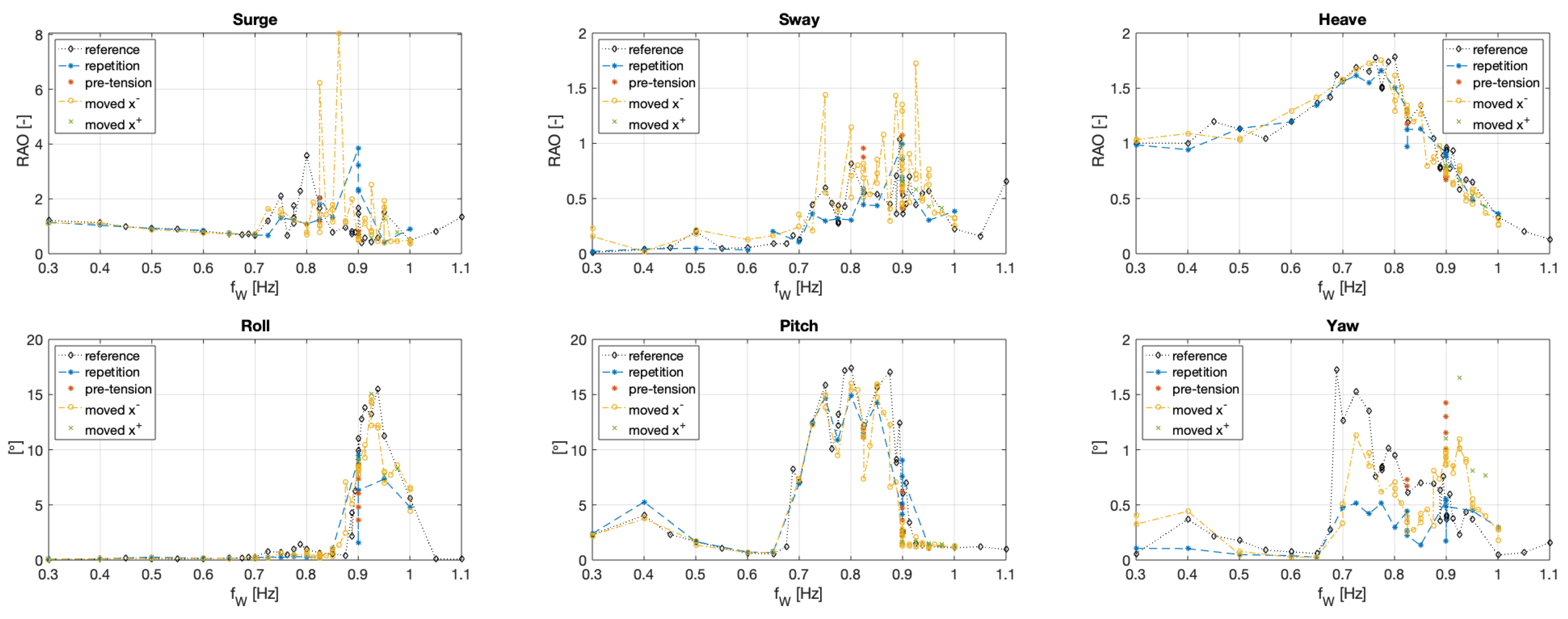
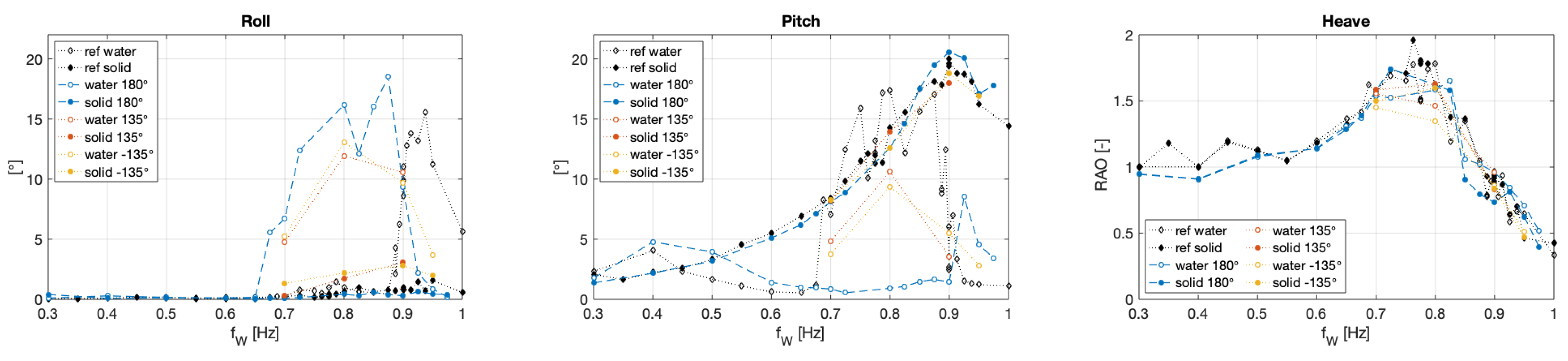
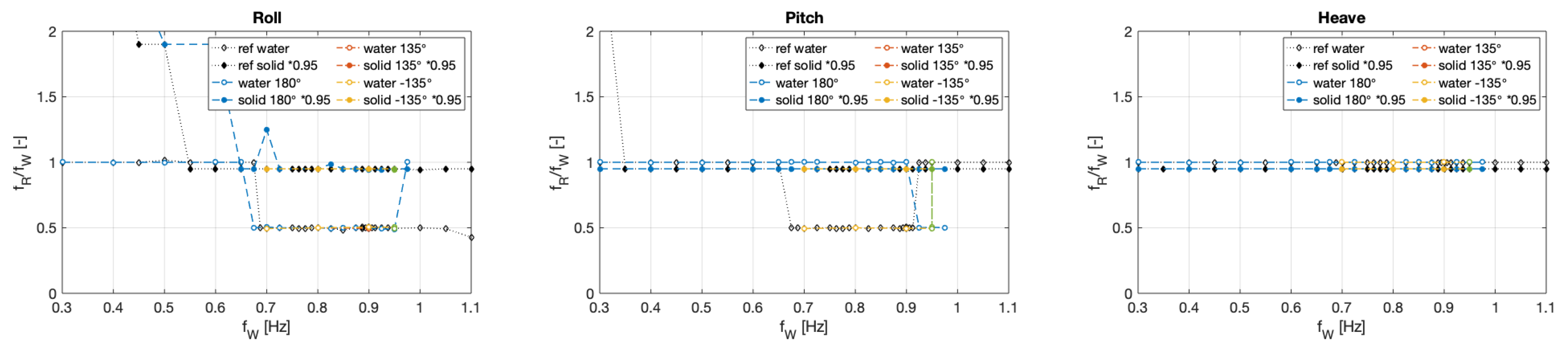
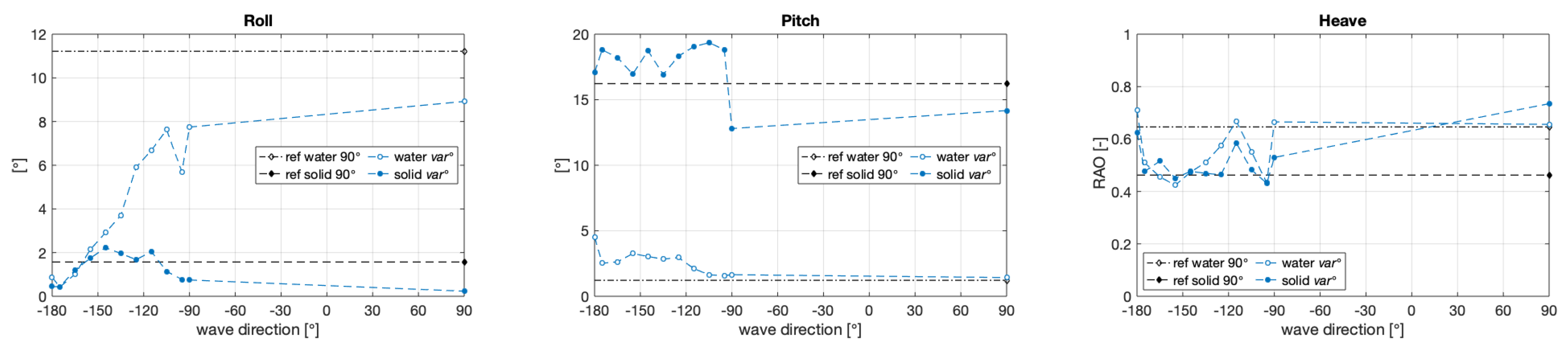
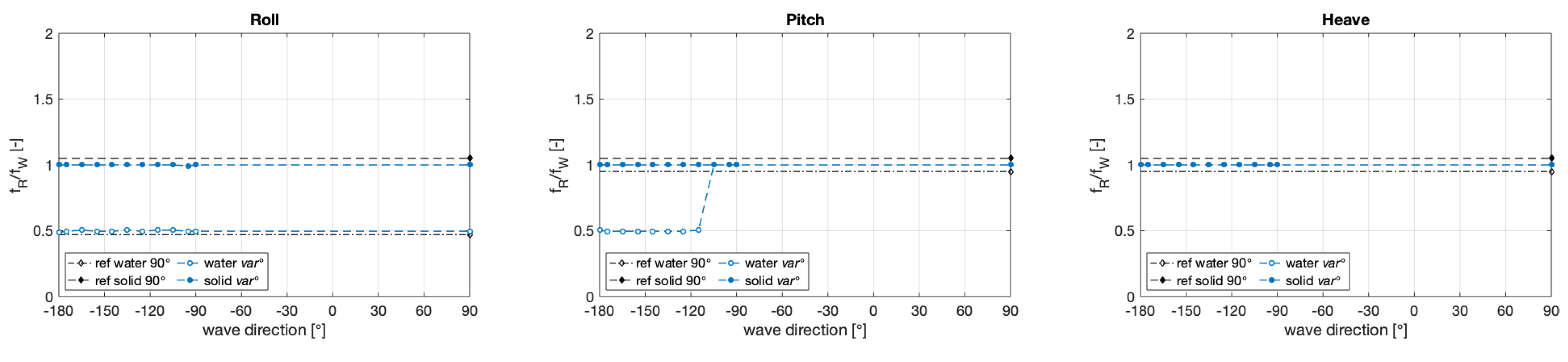
3.5. Direction Including Comparison with the Solid Case
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Notation
| amplitude waves (mm) measured | |
| amplitude waves (mm) requested from the wave makers | |
| d | cylinder draft (m) |
| D | cylinder diameter (m) |
| response frequency (Hz) measured | |
| frequency wave (Hz) requested from the wave makers | |
| h | water depth inside the cylinder (m) |
| H | height of the cylinder (m) |
| x | distance (m) in the main wave direction defined as 90° |
| X | motion in x-direction (mm) |
| y | distance orthogonal to the main wave direction (m) |
| Y | motion in y-direction (mm) |
| z | distance vertical direction (m) |
| Z | motion in z-direction (mm) |
| DoF | degree of freedom |
| MoCAP | motion capturing system |
| RAO | response amplitude operator |
| RQ | research question |
| WG | wave gauge |
References
- Gabl, R.; Davey, T.; Nixon, E.; Steynor, J.; Ingram, D.M. Comparison of a Floating Cylinder with Solid and Water Ballast. Water 2019, 11, 2487. [Google Scholar] [CrossRef]
- Gabl, R.; Davey, T.; Nixon, E.; Steynor, J.; Ingram, D.M. Experimental Data of a Floating Cylinder in a Wave Tank: Comparison Solid and Water Ballast. Data 2019, 4, 146. [Google Scholar] [CrossRef]
- Fossen, T.; Nijmeijer, H. Parametric Resonance in Dynamical Systems; Springer: New York, NY, USA, 2012. [Google Scholar]
- France, W.; Levadou, M.; Treakle, T.; Paulling, J.; Michel, R.; Moore, C. An Investigation of Head-Sea Parametric Rolling and Its Influence on Container Lashing Systems; The Society of Naval Architects and Marine Engineers: Alexandria, VA, USA, 2001; pp. 1–24. [Google Scholar]
- Cheng, P.; Liang, N.; Li, R.; Lan, H.; Cheng, Q. Analysis of Influence of Ship Roll on Ship Power System with Renewable Energy. Energies 2020, 13, 1. [Google Scholar] [CrossRef]
- Li, C.T.; Wang, D.Y.; Cai, Z.H. Experimental and numerical investigation on the scaled model of lashing bridge coupled with hull structure and container stack. Ships Offshore Struct. 2020. [Google Scholar] [CrossRef]
- Neves, M.A.S.; Rodríguez, C.A. On unstable ship motions resulting from strong non-linear coupling. Ocean Eng. 2016, 33, 1853–1883. [Google Scholar] [CrossRef]
- Wang, L.; Tang, Y.; Li, Y.; Zhang, J.C.; Lui, L.Q. Studies on Stochastic Parametric Roll of Ship with Stochastic Averaging Method. China Ocean Eng. 2020, 34, 289–298. [Google Scholar] [CrossRef]
- Guze, S.; Wawrzynski, W.; Wilczynski, P. Determination of Parameters Describing the Risk Areas of Ships Chaotic Rolling on the Example of LNG Carrier and OSV Vessel. J. Mar. Sci. Eng. 2020, 8, 91. [Google Scholar] [CrossRef]
- Kianejad, S.S.; Enshaei, H.; Duffy, J.; Ansarifard, N. Prediction of a ship roll added mass moment of inertia using numerical simulation. Ocean Eng. 2019, 173, 77–89. [Google Scholar] [CrossRef]
- Olivieri, A.; Francescutto, A.; Campana, E.F.; Stern, F. Parametric Roll: Highly Controlled Experiments for an Innovative Ship Design. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 4, pp. 291–299. [Google Scholar]
- Huang, S.; Duan, W.; Han, X.; Nicoll, R.; You, Y.G.; Sheng, S.W. Nonlinear analysis of sloshing and floating body coupled motion in the time-domain. Ocean Eng. 2018, 164, 350–366. [Google Scholar] [CrossRef]
- Zhou, Y.; Ma, N.; Lu, J.; Gu, M. A study of hybrid prediction method for ship parametric rolling. J. Hydrodyn. 2016, 28, 617–628. [Google Scholar] [CrossRef]
- Zhou, Y. Further validation study of hybrid prediction method of parametric roll. Ocean Eng. 2019, 186, 106103. [Google Scholar] [CrossRef]
- Zhao, W.; Taylor, P.; Wolgamot, H.; Taylor, R.E. Identifying linear and nonlinear coupling between fluid sloshing in tanks, roll of a barge and external free-surface waves. J. Fluid Mech. 2018, 844, 403–434. [Google Scholar] [CrossRef]
- Zhao, W.H.; McPhail, F. Roll response of an LNG carrier considering the liquid cargo flow. Ocean Eng. 2017, 129, 83–91. [Google Scholar] [CrossRef]
- Zhu, X.; Yoo, W. Numerical modeling of a spar platform tethered by a mooring cable. Chin. J. Mech. Eng. 2015, 28, 785–792. [Google Scholar] [CrossRef]
- Orszaghova, J.; Wolgamot, H.; Draper, S.; Taylor, P.H.; Rafiee, A. Onset and limiting amplitude of yaw instability of a submerged three-tethered buoy. Proc. R. Soc. A 2020, 476, 20190762. [Google Scholar] [CrossRef]
- Tarrant, K.; Meskel, C. Investigation on parametrically excited motions of point absorbers in regular waves. Ocean Eng. 2016, 111, 67–81. [Google Scholar] [CrossRef]
- Radhakrishnan, S.; Datla, R.; Hires, R.I. Theoretical and experimental analysis of tethered buoy instability in gravity waves. Ocean Eng. 2007, 34, 261–274. [Google Scholar] [CrossRef]
- Jiang, H.; You, Y.; Hu, Z.; Zheng, X.; Ma, Q. Comparative Study on Violent Sloshing with Water Jet Flows by Using the ISPH Method. Water 2019, 11, 2590. [Google Scholar] [CrossRef]
- Trimulyono, A.; Hashimoto, H.; Matsuda, A. Experimental Validation of Single- and Two-Phase Smoothed Particle Hydrodynamics on Sloshing in a Prismatic Tank. J. Mar. Sci. Eng. 2019, 7, 247. [Google Scholar] [CrossRef]
- Kim, D.H.; Kim, E.S.; Shin, S.-C.; Kwon, S.H. Sources of the Measurement Error of the Impact Pressure in Sloshing Experiments. J. Mar. Sci. Eng. 2019, 7, 207. [Google Scholar] [CrossRef]
- Delorme, L.; Colagrossi, A.; Souto-Iglesias, A.; Zamora-Rodríguez, R.; Botía-Vera, E. A set of canonical problems in sloshing, Part I: Pressure field in forced roll-comparison between experimental results and SPH. Ocean Eng. 2009, 36, 168–178. [Google Scholar] [CrossRef]
- Amicarelli, A.; Manenti, S.; Albano, R.; Agate, G.; Paggi, M.; Longoni, L.; Mirauda, D.; Ziane, L.; Viccione, G.; Todeschini, S.; et al. 2020 SPHERA v.9.0.0: A Computational Fluid Dynamics research code, based on the Smoothed Particle Hydrodynamics mesh-less method. Comput. Phys. Commun. 2009, 250, 107157. [Google Scholar] [CrossRef]
- Gunn, D.F.; Rudman, M.; Cohen, R.C.Z. Wave interaction with a tethered buoy: SPH simulation and experimental validation. Ocean Eng. 2018, 156, 306–317. [Google Scholar] [CrossRef]
- Guo, K.; Sun, P.-N.; Cao, X.-Y.; Huang, X. A 3D SPH model for simulating water flooding of a damaged floating structure. J. Hydrodyn. 2017, 29, 831–844. [Google Scholar] [CrossRef]
- Ming, F.R.; Zhang, A.M.; Cheng, H.; Sun, P.N. Numerical simulation of a damaged ship cabin flooding in transversal waves T with Smoothed Particle Hydrodynamics method. Ocean Eng. 2018, 165, 336–352. [Google Scholar] [CrossRef]
- Cheng, H.; Zhang, A.M.; Ming, F.R. Study on coupled dynamics of ship and flooding water based on experimental and SPH methods. Phys. Fluids 2017, 29, 107101. [Google Scholar] [CrossRef]
- Royon-Lebeaud, A.; Hopfinger, E.J.; Cartellier, A. Liquid Sloshing and Wave Breaking in Circular and Square-Base Cylindrical Containers. J. Fluid Mech. 2007, 577, 467–494. [Google Scholar] [CrossRef]
- Frosina, E.; Senatore, A.; Andreozzi, A.; Fortunato, F.; Giliberti, P. Experimental and Numerical Analyses of the Sloshing in a Fuel Tank. Energies 2018, 11, 682. [Google Scholar] [CrossRef]
- Chong, W.; Hongde, Q.; Ge, L.; Ting, G. Study on Sloshing of Liquid Tank in Large LNG-FSRU Based on CLSVOF Method. Int. J. Heat Technol. 2016, 34, 616–622. [Google Scholar]
- Liu, J.; Zang, Q.S.; Ye, W.B.; Lin, G. High performence of sloshing problem in cylindrical tank with various barrels by isogeometric boundary element method. Eng. Anal. Bound. Elem. 2020, 114, 148–165. [Google Scholar] [CrossRef]
- Wei, Z.; Feng, J.; Ghalandari, M.; Maleki, A.; Abdelmalek, Z. Numerical Modeling of Sloshing Frequencies in Tanks with Structure Using New Presented DQM-BEM Technique. Symmetry 2020, 12, 655. [Google Scholar] [CrossRef]
- Sanapala, V.S.; Sajish, S.D.; Velusamy, K.; Ravisankar, A.; Patnaik, B.S.V. An experimental investigation on the dynamics of liquid sloshing in a rectangular tank and its interaction with an internal vertical pole. J. Sound Vib. 2019, 449, 43–63. [Google Scholar] [CrossRef]
- Ye, W.B.; Liu, J.; Lin, G.; Zhou, Y.; Yu, L. High performance analysis of lateral sloshing response in vertical cylinders with dual circular or arc-shaped porous structures. Appl. Ocean Res. 2018, 81, 47–71. [Google Scholar] [CrossRef]
- Demirel, E.; Aral, M.M. Liquid Sloshing Damping in an Accelerated Tank Using a Novel Slot-Baffle Design. Water 2018, 10, 1565. [Google Scholar] [CrossRef]
- Dinçer, A.E. Investigation of the sloshing behavior due to seismic excitations considering two-way coupling of the fluid and the structure. Water 2019, 11, 2664. [Google Scholar] [CrossRef]
- Gabl, R.; Davey, T.; Ingram, D.M. Additional Experimental Data of a Floating Cylinder in a Wave Tank—Verification Experiments; DataShare Edinburgh [Dataset]; University of Edinburgh: Edinburgh, UK, 2020. [Google Scholar] [CrossRef]
- Gabl, R.; Steynor, J.; Forehand, D.I.M.; Davey, T.; Bruce, T.; Ingram, D.M. Capturing the Motion of the Free Surface of a Fluid Stored within a Floating Structure. Water 2019, 11, 50. [Google Scholar] [CrossRef]
- Ingram, D.; Wallace, R.; Robinson, A.; Bryden, I. The Design and Commissioning of the First, Circular, Combined Current and Wave Test Basin. In Proceedings of the Oceans 2014 MTS/IEEE, Taipei, Taiwan, 7–10 April 2014. [Google Scholar]
- Draycott, S.; Sellar, B.; Davey, T.; Noble, D.R.; Venugopal, V.; Ingram, D. Capture and Simulation of the Ocean Environment for Offshore Renewable Energy. Renew. Sustain. Energy Rev. 2019, 104, 15–29. [Google Scholar] [CrossRef]
- Noble, D.R.; Draycott, S.; Nambiar, A.; Sellar, B.G.; Steynor, J.; Kiprakis, A. Experimental Assessment of Flow, Performance, and Loads for Tidal Turbines in a Closely-Spaced Array. Energies 2020, 13, 1977. [Google Scholar] [CrossRef]
- Jourdain de Thieulloy, M.; Dorward, M.; Old, C.; Gabl, R.; Davey, T.; Ingram, D.M.; Sellar, B.G. On the Use of a Single Beam Acoustic Current Profiler for Multi-Point Velocity Measurement in a Wave and Current Basin. Sensors 2020, 20, 3881. [Google Scholar] [CrossRef]
- Jourdain de Thieulloy, M.; Dorward, M.; Old, C.; Gabl, R.; Davey, T.; Ingram, D.M.; Sellar, B.G. Single-Beam Acoustic Doppler Profiler and Co-Located Acoustic Doppler Velocimeter Flow Velocity Data. Data 2020, 5, 61. [Google Scholar] [CrossRef]
- Gabl, R.; Davey, T.; Cao, Y.; Li, Q.; Li, B.; Walker, K.L.; Giorgio-Serchi, F.; Aracri, S.; Kiprakis, A.; Stokes, A.; et al. Experimental Force Data of a hung up ROV under Wave and Current. Data 2020, 5, 57. [Google Scholar] [CrossRef]
- MARINET (2012) Work Package 2: Standards and Best Practice—D2.1 Wave Instrumentation Database. Revision: 05. Available online: http://www.marinet2.eu/wp-content/uploads/2017/04/D2.01-Wave-Instrumentation-Database.pdf (accessed on 30 May 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WGNr | WG1 | WG2 | WG3 | WG4 | WG5 |
|---|---|---|---|---|---|
| x (m) | −0.82 | −0.73 | −0.45 | 0.00 | 0.18 |
| y (m) | −1.50 = 3 | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gabl, R.; Davey, T.; Ingram, D.M. Roll Motion of a Water Filled Floating Cylinder—Additional Experimental Verification. Water 2020, 12, 2219. https://doi.org/10.3390/w12082219
Gabl R, Davey T, Ingram DM. Roll Motion of a Water Filled Floating Cylinder—Additional Experimental Verification. Water. 2020; 12(8):2219. https://doi.org/10.3390/w12082219
Chicago/Turabian StyleGabl, Roman, Thomas Davey, and David M. Ingram. 2020. "Roll Motion of a Water Filled Floating Cylinder—Additional Experimental Verification" Water 12, no. 8: 2219. https://doi.org/10.3390/w12082219
APA StyleGabl, R., Davey, T., & Ingram, D. M. (2020). Roll Motion of a Water Filled Floating Cylinder—Additional Experimental Verification. Water, 12(8), 2219. https://doi.org/10.3390/w12082219