1. Introduction
Over the years, extreme weather events have become increasingly frequent, causing dramatic economic and social damage. According to data on natural disasters in the EU Member States, the total reported economic losses caused by weather and climate-related extremes between 1980 and 2017 amounted to approximately EUR 426 billion (at 2017 values) accounting for about 83% of the monetary losses over that period [
1].
Changing climatic conditions and the increase in the frequency and intensity of extreme precipitation events (heavy rainfall, rainstorm, heavy snow, hail) are not the primary driver of the observed increase in economic losses from river floods and storms in Europe during recent decades, which is mainly due to the increasing exposure of people and economic assets in hazard-prone areas [
1]. As a matter of fact, the urban population growth, the high concentration of people and activities in urban areas and the development of cities occurred in the last two centuries represent a disruptive action for the natural system, resulting in excessive soil sealing, and alteration of the hydrological system [
2,
3]. As a result, the majority of land use in urban areas is impervious ground surface that produces accelerated runoff and diminished infiltration, increasing surface runoff volumes. According to the harmonized definition by Eurostat and the OECD (i.e., Organisation for Economic Co-operation and Development), urban areas—defined as cities, towns and suburbs—provide a home to over 70% of the EU-population, and this number is expected to rise to over 80% by 2050 [
4,
5]. The combination of these factors makes cities the most vulnerable human settlements to the impacts of extreme weather and climate events, especially pluvial floods.
Pluvial flooding is defined as flooding that results from rainfall-generated overland flow; it is usually associated with either intense and/or prolonged rainstorm events, which generate high runoff volumes that exceed the capacity of drainage systems [
6]. Its formation is generated by direct surface runoff and ponding caused by rainwater [
7] and by the flow caused by sewers and urban minor watercourses, whose capacity has been exceeded as a result of extreme event [
8,
9]. The type and intensity of the produced impacts depend on the magnitude and frequency of the event, but also on intrinsic factors of the affected urban system, both physical (geographic, morphological, typological, technical, constructional, etc.) and social urban characteristics (see e.g., [
10]).
An efficient and detailed pluvial flood-hazard assessment in urban contexts is, therefore, crucial for sustainable urban development; however, pluvial flood modeling poses difficult challenges for hydrologists because of the short response time and the strong intensity of pluvial flood events [
11]. Urban storm-inundation models are often classified into three categories based on calculation algorithm: hydrologic, hydrodynamic and simplified models (see e.g., [
12,
13,
14]). Hydrologic and hydrodynamic storm-flooding models may be characterized by a higher level of accuracy relative to simplified models, but their practical application is often hampered by input data requirements and computational burden (e.g., highly complex flow paths; insufficient model efficiency for urban flooding simulations on meaningful scales; representation of microscale topographic features and blockage effects; capability of simulating both high-velocity low-depth flow on steep slopes and depression ponding typical of many urban flooding situations; uncertainty in friction parameters, etc.).
Several studies recently highlighted the potential of simplified raster-based methods for a fast and consistent flood hazard characterization across large computational domains. Their application is facilitated by their relatively low computational costs compared to hydraulic models and the steadily increasing availability and free accessibility of high-resolution Digital Elevation Models (DEMs). Actually, high-resolution terrain data from modern LiDAR (Light Detection And Ranging) systems (i.e., spatial resolution of the order of 1 m) are sufficiently accurate and resolved for simulating urban flows, making the development of raster-based algorithms extremely appealing for a prompt mapping of pluvial flood hazard across large municipalities, or for a quick assessment of potential impacts of a given modification of the urban texture (e.g., land-use change, new development, etc.).
However, to date, the literature on fast-processing DEM-based algorithms for pluvial flood-hazard in urban areas is still sparse, and flood hazard assessment using simplified models has mainly focused on fluvial flooding. In this regard, several raster-based methods have been proposed to assess fluvial flood hazard based on DEM-retrieved geomorphic methodologies using data-mining techniques involving the intersection of databases, statistics and machine learning (e.g., [
15,
16,
17,
18,
19]). They have been proven to be particularly helpful for analyses over large geographical regions in which information on flooding potential is limited (see e.g., HAND, short for Height Above the Nearest Drainage, [
20], or GFI, acronym of Geomorphic Flood Index, see e.g., [
21]). Nevertheless, geomorphic DEM-based approaches are not suitable for assessing pluvial-flooding hazard in urbanized areas, in which topography is deeply anthropogenically altered, with abundance of flat and sub-horizontal areas and a diffuse presence of sinks and pits. Moreover, the extent of pluvial-flooded areas is largely controlled by the spatial distribution and the volume of rainfall, which are not explicitly considered in geomorphic methods such as GFI or HAND.
Our study focuses on a class of raster- or DEM-based approaches proposed in literature that has been recently shown to be very promising for the characterization of pluvial-flooding hazard in urban areas: the so-called Hierarchical Filling-&-Spilling Algorithm (HFSA) or Puddle-to-Puddle (P2P) Dynamic Filling-&-Spilling (see e.g., [
11,
22,
23,
24,
25]).
In watershed modeling, the presence of surface depressions in a DEM is considered undesirable, since they result in disconnected stream-flow patterns and spurious interior sub-watersheds pouring into them. The common practice is, therefore, to locate and remove surface depressions (pit-filling) while preprocessing the DEM [
26]. However, when dealing with pluvial flooding in urban areas, surface depressions and microtopography play a major role in the collection and storage of incoming precipitation, having a pronounced effect on the runoff response of a watershed. Therefore, rather than raster cells, taking depressions as the units of analysis appears to be more sensible and convenient [
27,
28].
Although their hydrologic importance has been long recognized (see e.g., [
29,
30,
31]), surface depressions have not been extensively studied. The first studies that considered depression storage in hydrologic modeling dates back to the late 1970s [
32,
33]. The authors proposed a 4-direction raster-based technique to characterize their geometric properties and hierarchical nested structure using Digital Surface Models (DSMs).
More recently, exploiting the availability of LiDAR data and high-resolution DEMs, ref. [
22,
34] proposed an automated algorithm to characterize surface microtopography and surface depression storages; they actually eliminated the artificial depression-filling phase, and identified DEM depressions, or puddles, determining their mutual hierarchical relationships in order to represent the real puddle-to-puddle (P2P) filling-merging-spilling process in modeling the overland flow dynamics. The P2P Filling-&-Spilling, or Hierarchical Filling-&-Spilling, simulates the water routing among different depressions according to their hierarchical structure.
In this study, we test the potential of P2P or HFS algorithms (hereafter also referred to as HFSAs) for pluvial flood-hazard assessment and mapping in urban areas, while overcoming common current limitations of other depression-based approaches (e.g., purely static approaches, isolated depressions; see [
27]). HFSA potential in this context has been first tested by [
11,
24,
27]. Our aim is to develop a fast-processing and cost-effective algorithm for characterizing pluvial-flooding hazard on the basis of high-resolution DEMs of (large) urban areas. Specifically, we present Safer_RAIN, a raster-based tool developed within the EIT Climate-KIC research project SaferPLACES (Improved assessment of pluvial, fluvial and coastal flood hazards and risks in European cities as a mean to build safer and resilient communities), which aims at exploring and developing innovative and simplified modeling techniques to assess and map pluvial, fluvial and coastal flood hazard and risk in urban environments under current and future climates. In particular, Safer_RAIN further expands the possibilities of HFSAs by introducing the option to map pluvial flooding associated with partial filling of the depression system, or to delineate the pluvial flooding associated with spatially variable rainfall data, such as data from weather radar measurements or nowcasts, or net-rainfall reflecting losses associated with spatially variable capacities of storm water drainage systems, or land-cover and infiltration rates. We present applications of Safer_RAIN to two urban areas in Northern Italy for reproducing recent pluvial flooding events and for simulating different pluvial flooding scenarios. Detailed numerical 2D hydrodynamic simulations are used for benchmarking and validation. We discuss limitations of the algorithm and its potential for climate services and decision support systems, as well as possible future research avenues.
2. DEM-Based Hierarchical Filling-&-Spilling Algorithm “Safer_RAIN”
2.1. Algorithm Description
The idea behind HFSAs is to identify pluvial-flooded areas on the basis of nested surface depressions extracted from high-resolution DEMs; the volume of rainfall is accumulated in depressions and, as they are filled, water spills downstream to depressions located at lower elevations. HFSAs can be classified as “non-source flooding”, meaning that all points where the elevation is below a given water level belong to the flooded area.
Original formulations of HFSA were based on the following main simplifying assumptions: (i) drainage direction is identified according to the D8 method [
35] (i.e., the flow direction from each cell to its downslope neighbor is retrieved accounting for the eight adjacent cells); (ii) overland flow dynamics is neglected and net-rainfall volume accumulates into the nested depression system according to the capacity and hierarchical structure of depressions themselves; (iii) the spatial distribution of rainfall is uniform; (iv) the terrain is considered an impermeable surface. We relaxed main assumptions (iii) and (iv) in developing Safer_RAIN.
Safer_RAIN consists of two main blocks: (1) DEM preprocessing, and (2) depression flooding (see e.g.,
Figure 1). DEM preprocessing, in turn, involves two main steps aimed at identifying the system of nested depressions: (1.1) their horizontal hydrological hierarchy, and (1.2) their vertical hierarchy; these steps define the hierarchy-tree representing the sequence of filling and spilling of the depressions.
2.1.1. Step (1.1): DEM Preprocessing, Identification of Depressions and Their Horizontal Hierarchy
This step is performed according to the method proposed by [
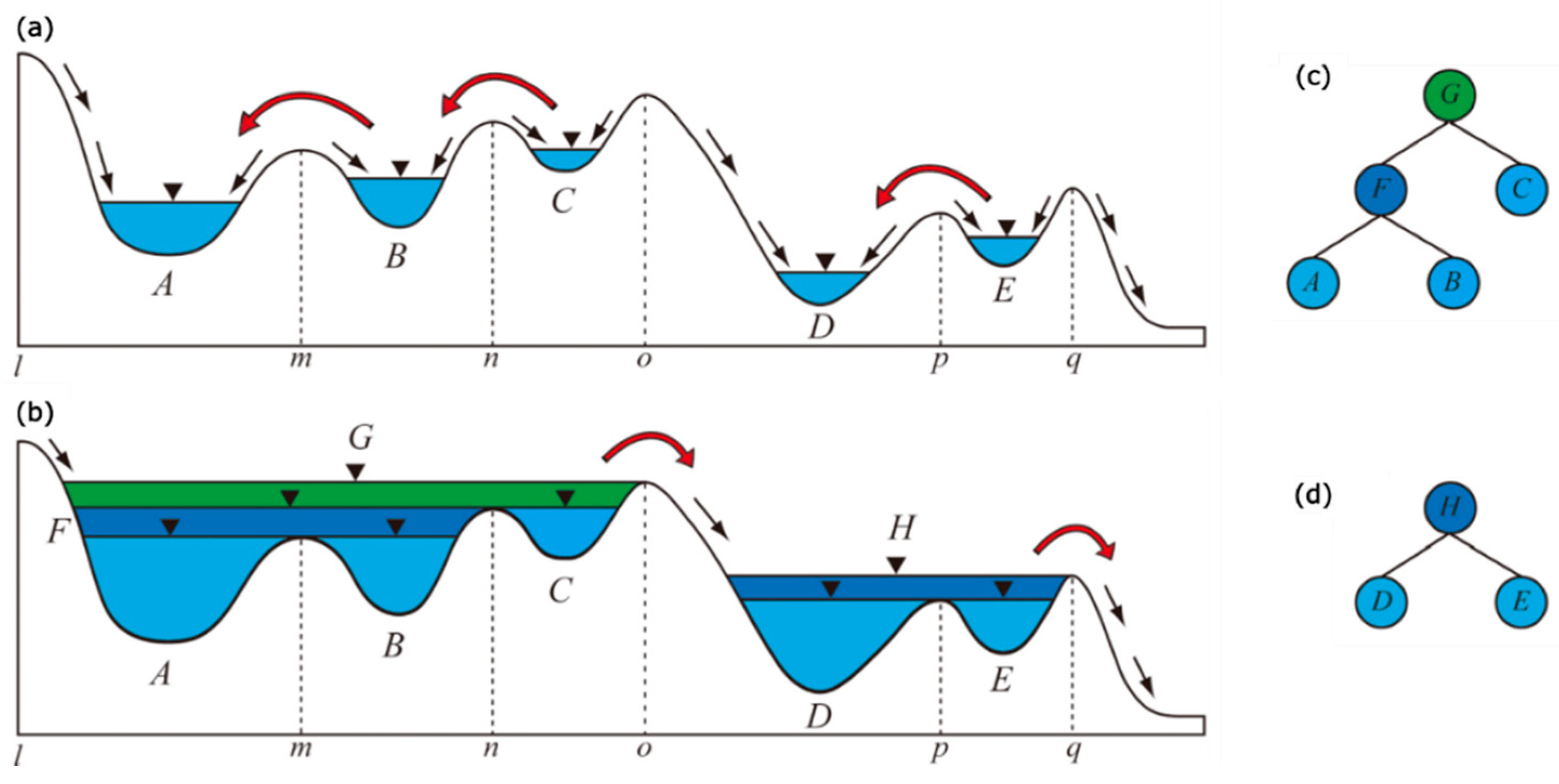
24], which requires the identification of: (i) first-level depressions (hereinafter referred to as blue-spots, as done in [
24]) and depression volumes (see e.g., depressions G and H in
Figure 2) through the application of a DEM pit-filling algorithm (see e.g., [
35]); (ii) blue-spot pour-points (i.e., the lowest-lying cell along the depression upper edge), from where water would pour out if the depression is filled up with water (see e.g., [
36]); (iii) blue-spot contributing watersheds; (iv) the derivation of the upstream/downstream relationships and flow paths between pourpoints according to the D8 method. In particular step (i) above retains only blue-spots that have volume or area larger than a user-specified threshold value; smaller depressions are filled up to their pour point level.
2.1.2. Step (1.2): DEM Preprocessing, Vertical Structure of Depression Systems
The second step is the identification of nested higher-level depressions within each blue-spot (i.e., G, F and H in
Figure 2), their vertical hierarchical relationship and water-level/volume relationship. To this aim, a top-down level-set method [
25] is used: starting from a filled condition (i.e., blue-spot G is completely full), the water level decreases gradually (i.e., top-down level-set), thus progressively identifying the higher-level nested depressions (i.e., A, B, C, D and E in
Figure 2) and their vertical hierarchical structure. This procedure fully characterizes the relationship between water-level and volume. In particular, to identify the vertical hierarchy of nested depressions, the contour tree method proposed by [
36] is used, which has been shown to be computationally efficient and functionally effective.
Differently from [
23,
25], when identifying the hierarchical tree of the nested depressions, Safer_RAIN keeps track of all the intermediate levels identified in the top-down level-set (the height of each level corresponds to the slicing discretization height), also accounting for those levels which do not have a direct connection with other depressions (see
Figure 3). This procedure is preparatory for the bottom-up flooding phase described below.
2.1.3. Step (2): Depression Flooding and Partial Filling
Relative to other HFSAs proposed in the literature, Safer_RAIN implements an original flooding phase that identifies partially flooded areas for a given rainfall volume by considering all the intermediate levels (see
Figure 3). To this aim, a bottom-up level-set method is used for quantifying partial filling in nested higher-level depressions: (i) the method starts from an empty condition (see e.g., step (a) in
Figure 4, the blue-spot is empty); (ii) according to their vertical hierarchy, higher-lever nested depressions are gradually filled from the bottom by adopting a user-specified water-level increment (bottom-up level-set); (iii) gradual filling is performed step-by-step, considering in turn depressions with same hierarchical order (i.e., same color in the hierarchical trees of
Figure 2 or
Figure 4) until they are completely filled.
Safer_RAIN guarantees a very fast computation of flooded areas, as DEM preprocessing (steps (1.1) and (1.2)) is run once and it fully characterizes the hierarchy for filling and spilling processes. Considering that, differently from a hydrodynamic model, it does not model flooding dynamics, it can produce an underestimation of maximum water levels; moreover, it does not allow for obtaining indication on timing and velocity.
2.2. Spatially Variable (Net) Rainfall
As mentioned in
Section 2.1, Safer_RAIN implements an original flooding phase which can use either uniform or spatially variable (i.e., gridded) rainfall depths as input rainfall volume. The spatially variable precipitation enables the user to: (i) simulate flooding resulting from weather radar products (hindcasts and nowcasts); (ii) incorporate a simplified representation of stormwater drainage system capacity; (iii) represent infiltration losses, since soil infiltration can deeply influence the inundation depth resulting from a pluvial flood event.
As regards infiltration losses, a pixel-based adaptation of the event-based Green-Ampt infiltration model [
37] is implemented in Safer_RAIN to represent these losses. The model can therefore handle spatially variable net-precipitation, enabling users to promptly asses pluvial-flood hazard associated with different land-use and land-cover scenarios.
The basic assumption behind the Green-Ampt model is that water infiltrates into (relatively) dry soil as a sharp wetting front. The application of the Green-Ampt method requires the estimation of the following parameters: water storage capacity
(-), pre-event soil moisture
(-), hydraulic conductivity
(L/T), wetting front soil suction head
(L). Typical values of the Green-Ampt parameters based on results of previous experiences can be derived from literature (see e.g., [
38]).
The pixel-based implementation of the Green-Ampt method considers time to ponding
and computes the overall infiltration depth
for a given pixel with homogeneous land-cover and soil-type characteristics as:
where
and
are rainfall intensity and duration, respectively, and
, while
can be computed as:
2.3. Safer_RAIN Input Data Requirements, User-Specified Settings and Output Data
The implementation of Safer_RAIN pluvial-flood hazard assessment requires the following input data: (i) a high-resolution DEM for the identification of blue-spots; (ii) a threshold criterion for identifying blue-spots (i.e., minimum volume, or area, or maximum depth); (iii) the height of the level-set needed in the top-down preprocessing phase for identifying the vertical hierarchical structure of depressions (the thinner this height, the higher the resolution of the representation of the nested depressions vertical structure, yet the higher the computational cost); (iv) the selection of a (gridded) rainfall event of interest (this information is required for the flooding phase).
The preprocessing phase returns different vector and raster layers, each one containing the following specific information: (1) the unique identification code (ID) of each blue-spot; (2) its depth; (3) a raster layer (i.e., sinks) containing the elevation of the blue-spots and information regarding their morphology and hierarchical structure. For each blue-spot, the layer identifies all levels considered in the level-set method and their corresponding volume, elevation and level from the bottom; each level is characterized by a specific level-ID, allowing the identification of the hierarchical structure; (4) a raster layer which stores the contributing watershed to each blue-spot; (5) a vector layer which associates each blue-spot with its corresponding pour-point (i.e., the lowest cell on the depression perimeter).
Concerning the flooding phase, Safer_RAIN returns: (1) a raster layer containing the water depth associated with each blue-spot; (2) an analogous layer reporting the water surface elevation (in meters above sea level) in each blue-spot; (3) a layer indicating the spilled rain volumes (i.e., water volume associated with the contributing watershed for each blue-spot); (4) a layer reporting the water volumes that are transferred to the contributing watershed (i.e., exceeding volumes) once each blue-spot is filled; (5) a vector layer containing the nodes connecting the different blue-spots; (6) a vector layer with the reaches connecting the different blue-spots; (7) a vector layer reporting the results of the simulated flooding (i.e., volume of rainwater fallen in each contributing watershed, volume of water contained within each blue-spot, degree of filling for each blue-spot, and volume of water spilled downstream for each blue-spot).
Note that Safer_RAIN is designed to run locally on computer devices as well as on Google Colaboratory (or Colab), exploiting free-to-use virtual machines provided at zero costs from Google.
5. Discussion and Future Work
Our analyses confirm that terrain data available from modern LiDAR technology are sufficiently accurate and resolved for simulating pluvial flooding in urban areas, and that blending such data with digital map data of building topology and land use can help to enhance pluvial flood-hazard assessment and mapping in urban areas. Small differences in water elevation and micro-topographic barriers can combine in urban settings to produce significant differences in inundated area and water depth, potentially resulting in deadly pitfalls. Accurately and effectively locating these urban hazard hotspots is therefore of paramount importance.
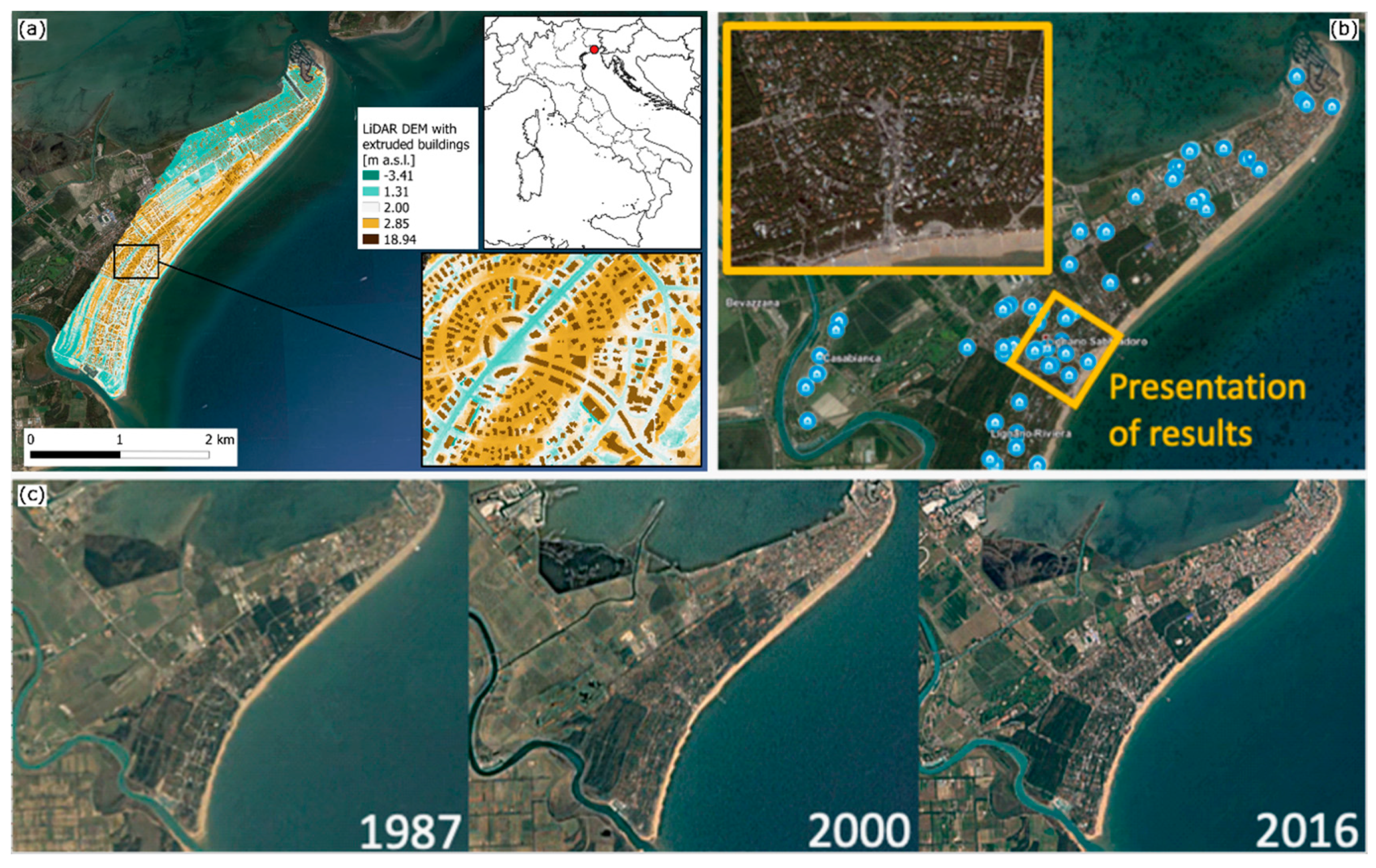
The application of the raster-based tool Safer_RAIN to Lignano Sabbiadoro (see
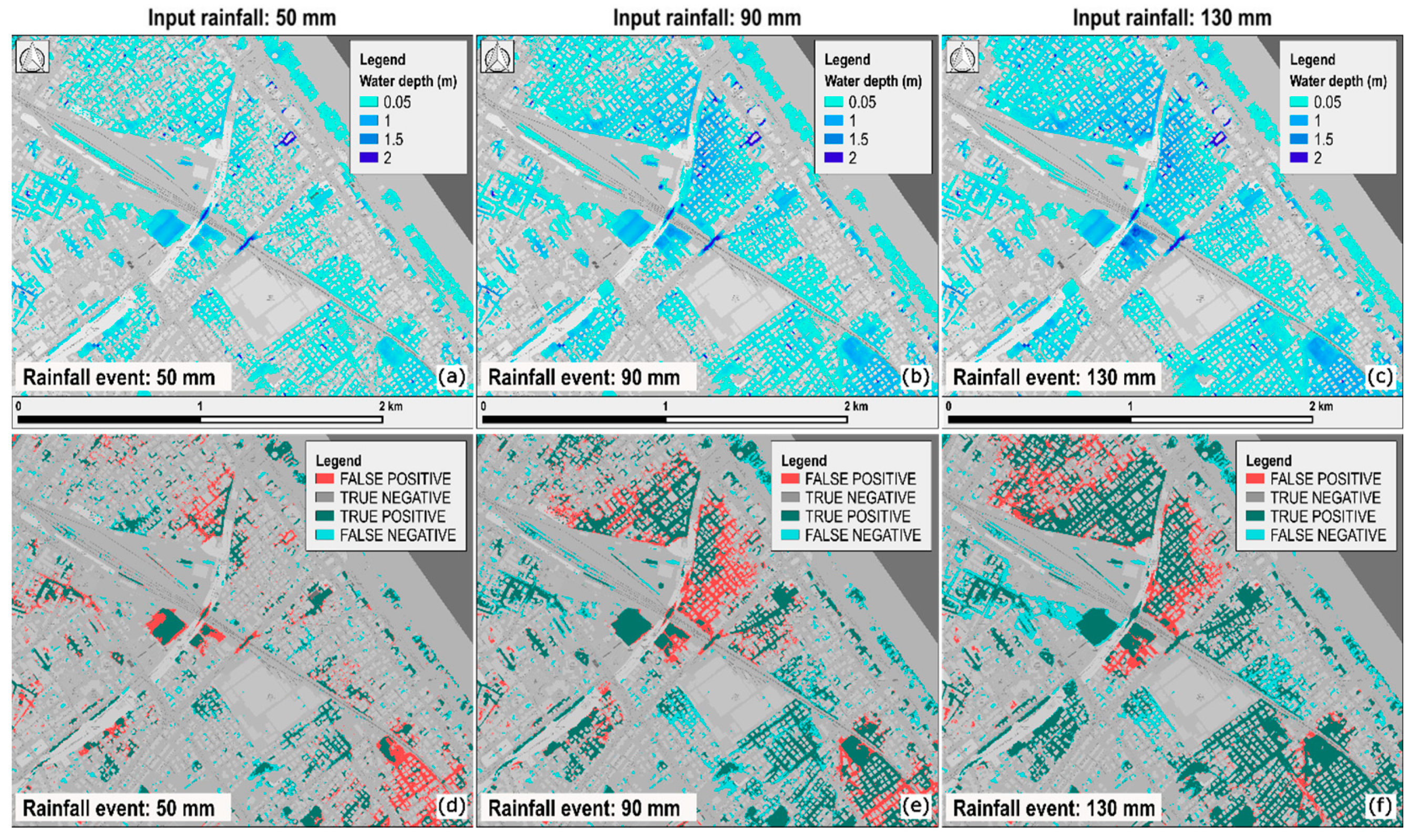
Section 3) and Rimini (see
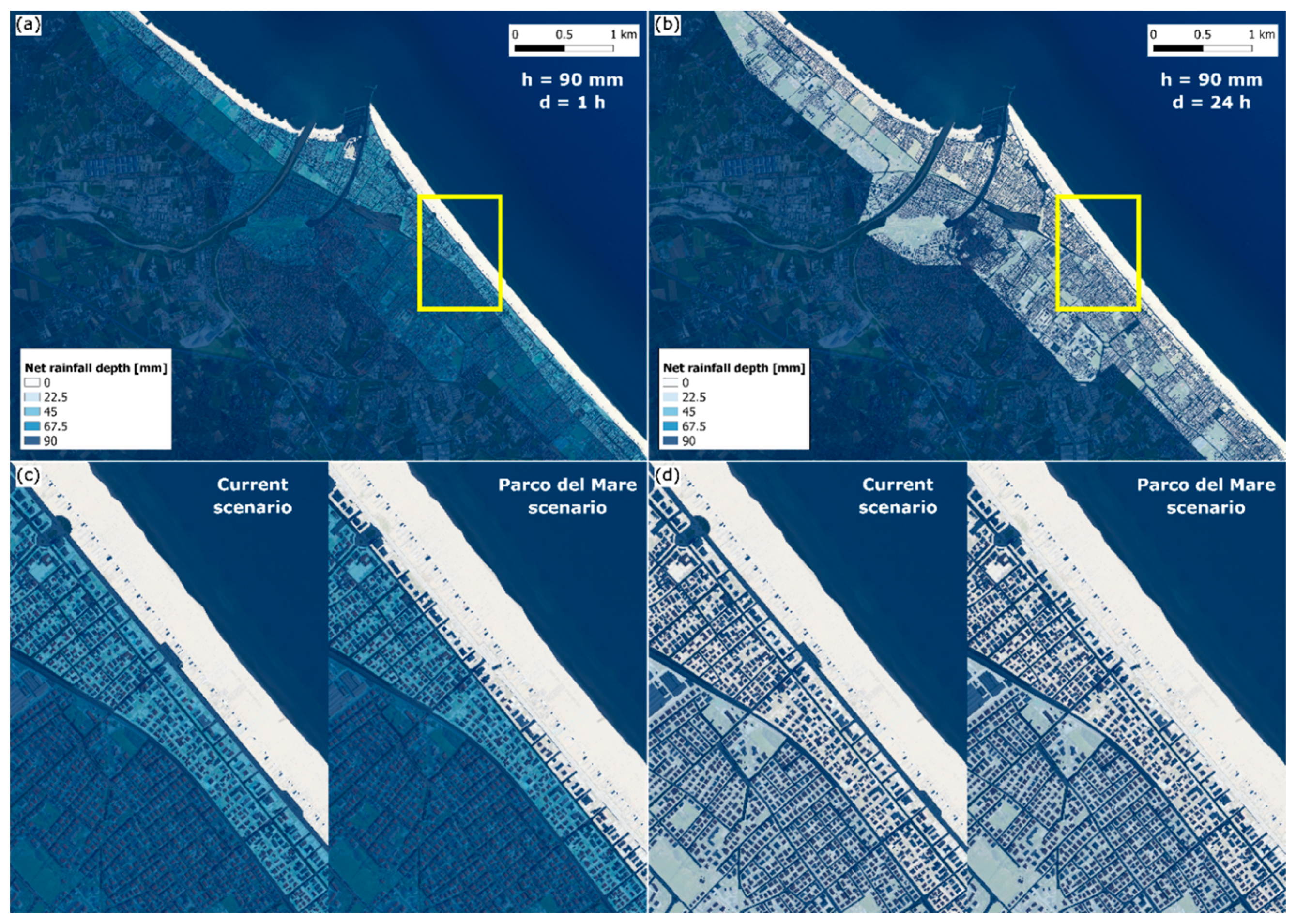
Section 4) shows that observed pluvial flooding events resulting from severe and very intense cloudbursts can be accurately reproduced even under oversimplified working hypotheses (i.e., spatially uniform precipitation, impervious surface). On the other hand, Safer_RAIN characteristics make it very useful for a straightforward application to spatially variable precipitation (e.g., weather radar) and spatially variable infiltration losses (e.g., capacity of storm water drainage systems, variable land-cover and infiltration rates), as illustrated for Rimini (see
Section 4). In this regard, it is important to highlight that the algorithm is capable of incorporating previous flood levels, by simply adding the upstream flooding volume as a raster input (added to the raster layer describing the precipitation); the potential of such an application could be investigated in future studies.
It must be noted that, differently from hydrodynamic models, Safer_RAIN cannot reproduce the flooding dynamics; thus, results do not provide indication on timing, nor velocity. Also, this can produce underestimation of maximum water levels, as backwater effects cannot be fully and properly reproduced, and routing is not modelled. On the other hand, Safer_RAIN guarantees a very fast computation of flooded areas, as terrain preprocessing is run only once and it fully characterizes the hierarchy of depressions for filling and spilling processes. Indeed, the application of the algorithm by means of Google Colab virtual machine (two 2.30 GHz CPUs, cache of 46,080 kB, 12 GB RAM) running on one core requires about 90 s for the preprocessing phase (with 0.05 m set-level and 100 m3 threshold volume) and about 9 s for the flooding phase (with cumulated rainfall of 124 mm) for Lignano Sabbiadoro (982 by 1068 grid, e.g., ~4 km2 at 2 m resolution), whereas the more demanding Rimini case study (6922 by 10,335 grid, e.g., ~72 km2 at 1 m resolution) requires about 293 s for the preprocessing phase (with 0.05 m set-level and 200 m3 threshold volume) and about 29 s for the flooding phase (e.g., spatially distributed net-rainfall for the 1-h event). The use of the above-mentioned virtual machine makes the computational effectiveness of Safer_RAIN algorithm even clearer: using a standard 4 GHz single core would approximately halve the runtime, and parallelization would further shrink the computational time
Overall, the outcomes of our study show that Safer_RAIN is a useful tool for the identification of pluvial-hazard hotspots and the optimal location of detention tanks and ponds; moreover, it can be used for identifying pluvial flooding scenarios useful, for instance, to define evacuation plans. Also, it is a convenient tool for rapidly assessing pluvial flooding hazard and risk dynamics associated with climate and land-use changes scenarios.
6. Conclusions
The steady increase in the last decades of economic losses and social consequences caused by hydrological extreme events in Europe (see e.g., [
41,
42]) has triggered the need for improving the assessment of pluvial, fluvial and coastal flood hazards and risks in European cities. Heavy rainfall events can be extremely concentrated in time and space and activate high-intensity runoff processes. In urban environments, which are mostly impervious, these reach their maximum hydraulic complexity due to quick-response runoff. Therefore, computational effective tools for rapidly assessing pluvial flooding hazard and risk in large urban areas are of paramount importance, as flood hazard and risk concentrates in these areas, where the majority of at-risk assets are located.
Nowadays, detailed and accurate flood inundation maps can be obtained by means of hydrological and hydraulic models. However, as their practical application is highly resources intensive, consistent high-resolution flood hazard maps across large residential and urban areas are still lacking. In this context, given the increasing availability of LiDAR high-resolution DEMs, our study assesses the potential of fast-processing DEM-based algorithms for consistent flood hazard characterization, with special focus on fluvial and pluvial flooding.
Urban districts are characterized by deeply altered topographic surfaces and frequent and large flat and sub-horizontal areas. Our study tests the potential of a DEM-based Hierarchical Filling-&-Spilling algorithm, named Safer_RAIN, which simulates urban flooding due to severe rainstorms by identifying surface depressions and their hierarchical structure by analyzing high resolution LiDAR DEMs. We performed a demonstrative application of Safer_RAIN for the case study of Lignano Sabbiadoro (Friuli Venezia Giulia, North-eastern Italy), with particular focus on the urban pluvial flooding caused by the severe rainstorm of the 11 September 2017, and an extensive sensitivity analysis for the city of Rimini for two different land-use scenarios. The comparison with a benchmark 2D hydrodynamic model confirmed the accuracy and reliability of pluvial flooding maps produced by Safer_RAIN in both cases, Lignano Sabbiadoro (i.e., agreement of 53% for the flooded area evaluated with the benchmark model) and Rimini (i.e., accuracy values in the range of 0.96–0.99). Main sources of error relative to the benchmark numerical 2D hydrodynamic scheme can be explained by considering that, differently from a hydrodynamic model, Safer_RAIN does not incorporate any detailed description of the dynamics of overland flow and water-depth routing. On the other hand, Safer_RAIN guarantees a very fast computation of flooded areas, and, on the basis of the results of Rimini applications, it was shown to be very effective in identifying pluvial-hazard hotspots, handling spatially distributed rainfall and rapidly assessing the pluvial flooding hazard associated with different land-use scenarios.
The outcomes of Safer_RAIN can provide useful information for risk assessment and management to different stakeholders and purposes: city council and land use planners for designing cloudburst mitigation and adaptation plans in cities (e.g., assessing the effectiveness of stormwater detentions ponds and nature-based solutions for urban flood risk mitigation), multi-utility companies for localizing sewage system hotspots where to invest in improving the drainage networks both with grey and green infrastructures; insurance companies for better profiling pluvial risk in cities and invest in climate mitigation strategies; evacuation planning for civil protection purposes, exploiting the capability to provide pluvial flood hazard maps in quasi real-time.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}