Innovative Water Quality and Ecology Monitoring Using Underwater Unmanned Vehicles: Field Applications, Challenges and Feedback from Water Managers



Abstract
:1. Introduction
2. Materials and Methods
2.1. Monitoring Setup: Field Testing with Underwater Drones and Sensors
2.1.1. Underwater Drones (ROV)
2.1.2. Sensors and Equipment
2.1.3. Data Collection
2.2. Semi-Structured Interviews of Water Managers
2.3. Selection of Applications for Field Testing
3. Results
3.1. Outcomes of Field Measurement Campaigns
3.2. Feedback from Water Managers during Semi-Strutured Interviews
3.3. Field Challenges and Lessons Learned
3.3.1. Navigation/Operation
3.3.2. Data
3.3.3. Practicability
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shukla, J.M.; Skea, J.; Buendia, E.C.; Masson-Delmotte, V.; Pörtner, H.O.; Roberts, D.C.; Zhai, P.; Slade, R.; Connors, S.; van Diemen, R.; et al. Climate Change and Land: An IPCC Special Report on Climate Change, Desertification, Land Degradation, Sustainable Land Management, Food Security, and Greenhouse Gas Fluxes in Terrestrial Ecosystems; IPCC: Geneva, Switzerland, 2019; pp. 803–830. [Google Scholar]
- Global Commission on Adaptation. Adapt Now: A Global Call for Leadership on Climate Resilience; Global center on Adaptation: Groningen, The Netherlands, 2019; p. 90. [Google Scholar]
- Duan, W.; Takara, K.; He, B.; Luo, P.; Nover, D.; Yamashiki, Y. Spatial and temporal trends in estimates of nutrient and suspended sediment loads in the Ishikari River, Japan, 1985 to 2010. Sci. Total Environ. 2013, 461–462, 499–508. [Google Scholar] [CrossRef]
- Duan, W.; He, B.; Nover, D.; Yang, G.; Chen, W.; Meng, H.; Zou, S.; Liu, C. Water quality assessment and pollution source identification of the eastern poyang lake basin using multivariate statistical methods. Sustainability 2016, 8, 133. [Google Scholar] [CrossRef] [Green Version]
- Birk, S.; Bonne, W.; Borja, A.; Brucet, S.; Courrat, A.; Poikane, S.; Solimini, A.; van de Bund, W.; Zampoukas, N.; Hering, D. Three hundred ways to assess Europe’s surface waters: An almost complete overview of biological methods to implement the Water Framework Directive. Ecol. Indic. 2011, 18, 31–41. [Google Scholar] [CrossRef]
- EIP Water—Action Group (AG100) Innovative Monitoring Technologies and EU Water Legislation: A White Paper. Available online: https://www.eip-water.eu/sites/default/files/AG100%20RTWQM%20water%20legislation_whitepaper_v2_150714_def.pdf (accessed on 14 March 2020).
- Hunting, E.R.; De Jong, S.; Vijver, M.G. Assessment of Monitoring Tools and Strategies Safeguarding Aquatic Ecosystems within the European Water Framework Directive; Leiden University: Institute of Environmental Sciences: Leiden, The Netherlands, 2017; p. 35. [Google Scholar]
- Hitz, G.; Pomerleau, F.; Garneau, M.E.; Pradalier, C.; Posch, T.; Pernthaler, J.; Siegwart, R.Y. Autonomous inland water monitoring: Design and application of a surface vessel. Robot. Autom. Mag. IEEE 2012, 19, 62–72. [Google Scholar] [CrossRef]
- Larsen, M.C.; Hamilton, P.A.; Werkheiser, W.H. Water Quality Status and Trends in the United States. In Monitoring Water Quality; Ahuja, S., Ed.; Elsevier: Oxford, UK, 2013; pp. 19–57. [Google Scholar]
- Casper, A.F.; Dixon, B.; Steimle, E.T.; Hall, M.L.; Conmy, R.N. Scales of heterogeneity of water quality in rivers: Insights from high resolution maps based on integrated geospatial, sensor and ROV technologies. Appl. Geogr. 2012, 32, 455–464. [Google Scholar] [CrossRef]
- Bogue, R. Robots for Monitoring the Environment. Ind. Robot An Int. J. 2011, 38, 560–566. [Google Scholar] [CrossRef]
- Stewart, L.L.; Auster, P.J. Low Cost Rov’s for Science. Proc. OCEANS 1989, 3, 816–819. [Google Scholar]
- Boon, P.J.; Lassière, O.L.; Duncan, W.M. The use of a Remotely Operated Vehicle (ROV) for surveying submerged aquatic plant communities in standing waters. SIL Proc. 1922–2010 1998, 26, 2353–2357. [Google Scholar] [CrossRef]
- Adams, P.B.; Butler, J.L.; Baxter, C.H.; Laidig, T.E.; Dahlin, K.A.; Wakefield, W.W. Population estimates of Pacific coast groundfishes from video transects and swept-area trawls. Fishery Bulletin. 1995, 93, 446–455. [Google Scholar]
- Edsall, T.A.; Behrendt, T.E.; Cholwek, G.; Frey, J.W.; Kennedy, G.W.; Smith, S.B. Use of Remote-Sensing Techniques to Survey the Physical Habitat, of Large Rivers. U.S. Geol. Surv. 1997, 983, 20. [Google Scholar]
- Porritt, M. ROVS for Marine Research. J. Aquac. Mar. Biol. 2015, 2, 4–6. [Google Scholar] [CrossRef]
- Azis, F.A.; Aras, M.S.M.; Rashid, M.Z.A.; Othman, M.N.; Abdullah, S.S. Problem identification for Underwater Remotely Operated Vehicle (ROV): A case study. Procedia Eng. 2012, 41, 554–560. [Google Scholar] [CrossRef] [Green Version]
- Lygouras, J.N.; Lalakos, K.A.; Tsalides, P.G. THETIS: An underwater remotely operated vehicle for water pollution measurements. Microprocess. Microsyst. 1998, 22, 227–237. [Google Scholar] [CrossRef]
- Ramadass, G.A.; Ramesh, S.; Selvakumar, J.M.; Ramesh, R.; Subramanian, A.N.; Sathianarayanan, D.; Harikrishnan, G.; Muthukumaran, D.; Jayakumar, V.K.; Chandrasekaran, E.; et al. Deep-ocean exploration using remotely operated vehicle at gas hydrate site in Krishna-Godavari basin, Bay of Bengal. Curr. Sci. 2010, 99, 809–815. [Google Scholar]
- Pacunski, R.E.; Palsson, W.A.; Greene, H.G.; Gunderson, D. Conducting Visual Surveys with a Small ROV in Shallow Water. In Marine Habitat Mapping Technology for Alaska; Reynolds, J.R., Greene, H.G., Eds.; Alaska Sea Grant for North Pacific Research Board: Fairbanks, AK, USA, 2008; pp. 109–128. [Google Scholar]
- Teece, M.A. An inexpensive remotely operated vehicle for underwater studies. Limnol. Oceanogr. Methods 2009, 7, 206–215. [Google Scholar] [CrossRef]
- Klump, J.V.; Paddock, R.; Lovalvo, D. A Multiple-Loop, ROV Controlled, In-Situ Water Sampler. J. Great Lakes Res. 1992, 18, 309–315. [Google Scholar] [CrossRef]
- Wulff, T.; Lehmenhecker, S.; Bauerfeind, E.; Hoge, U.; Shurn, K.; Klages, M. Biogeochemical research with an Autonomous Underwater Vehicle: Payload structure and arctic operations. In 2013 MTS/IEEE OCEANS-Bergen; IEEE: Bergen, Norway, 2013; pp. 1–10. [Google Scholar]
- Speller, L. Fishing for Pollutants. Ingenia 2012, 53, 27–32. [Google Scholar]
- Smolowitz, R.J.; Patel, S.H.; Haas, H.L.; Miller, S.A. Using a remotely operated vehicle (ROV) to observe loggerhead sea turtle (Caretta caretta) behavior on foraging grounds off the mid-Atlantic United States. J. Exp. Mar. Bio. Ecol. 2015, 471, 84–91. [Google Scholar] [CrossRef] [Green Version]
- Mapare, S.V.; Yu, P.L.; Sarkar, A.; Mukhopadhyay, S.C. A Review of sensor technology for in-field phosphate monitoring. In Proceedings of the International Conference on Sensing Technology, ICST, Wellington, New Zealand, 3–5 December 2013; pp. 411–418. [Google Scholar]
- Hyakudome, T.; Takao Sawa, T.; Nakano, Y.; Watanabe, Y.; Fukuda, T.; Nakatani, T.; Matsumoto, H.; Suga, R.; Yoshida, H.; Ochi, H.; et al. Development of prototype autonomous surface vehicle. In Techno-Ocean 2016 Return to Ocean; IEEE: Kobe, Japan, 2017; pp. 299–303. [Google Scholar]
- Xu, L.; Gu, H.; Li, C.; Shi, A.; Shen, J. System design of water quality monitoring robot with automatic navigation and self-test capability. Int. J. Control Autom. 2013, 6, 67–82. [Google Scholar] [CrossRef]
- Blix, K.; Pálffy, K.; Tóth, V.R.; Eltoft, T. Remote sensing of water quality parameters over Lake Balaton by using Sentinel-3 OLCI. Water 2018, 10, 1428. [Google Scholar] [CrossRef] [Green Version]
- Bresciani, M.; Pinardi, M.; Free, G.; Luciani, G.; Ghebrehiwot, S.; Laanen, M.; Peters, S.; Bella, V.D.; Padula, R.; Giardino, C. The use of multisource optical sensors to study phytoplankton spatio-temporal variation in a Shallow Turbid Lake. Water 2020, 12, 284. [Google Scholar] [CrossRef] [Green Version]
- Flick, U. An Introduction To Qualitative Research, 4th ed.; SAGE Publications: London, UK, 2009; p. 506. [Google Scholar]
- Boogaard, F.C.; de Lima, R.L.P.; Stroom, J. The added value of using aquatic drones for monitoring surface water Pilot Sloterplas (in Dutch: De meerwaarde van een onderwaterdrone bij het monitoren van oppervlaktewater, pilot Sloterplas). H2O-Online 2016, 5. [Google Scholar]
- de Lima, R.L.P.; Boogaard, F.C.; de Graaf, R.; Pires, L.M.D.; Sazonov, V. Monitoring the impacts of floating structures on the water quality and ecology using an underwater drone. In Proceedings of the IAHR World Congress, Hague, The Netherlands, 28 June–3 July 2015; p. 4. [Google Scholar]
- Boogaard, F.C.; de Graaf, R.E.; Foka, E.; Rutten, M.; de Lima, R.L.P.; Giessen, N. The effect of floating houses on water quality. In Proceedings of the Amsterdam International Water Week, Amsterdam, The Netherlands, 2–6 November 2015; p. 7. [Google Scholar]
- Baffaut, C.; Dabney, S.M.; Smolen, M.D.; Youssef, M.A.; Bonta, J.V.; Chu, M.L.; Guzman, J.A.; Shedekar, V.S.; Jha, M.K.; Arnold, J.G. Hydrologic and water quality modeling: Spatial and temporal considerations. Trans. ASABE 2015, 58, 1661–1680. [Google Scholar]
- Guo, D.; Lintern, A.; Webb, J.A.; Ryu, D.; Bende-Michl, U.; Liu, S.; Western, A.W. A data-based predictive model for spatiotemporal variability in stream water quality. Hydrol. Earth Syst. Sci. 2020, 24, 827–847. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Underwater Drone/Manufacturer/Location | Shape/Weight/Dimensions (L × W × H) | Depth Rating | Price (ca.) | Communication | Configuration/Diving | Special Features | Payload/ Expandable/ Battery (ca.) |
|---|---|---|---|---|---|---|---|
| Neptune, Thunder Tiger, Taichung, Taiwan | Cylindrical; 7.7 kg 77.4 × 29 × 28.5 cm | 10 m 1 | 600 € | Wireless; no real time video/data | Single propeller; Ballast tank | Re-surfaces when lost connection | 3 Kg; No (closed source) 1 h; replace time-consuming |
| SeaWolf, TTR Robotix, Taichung, Taiwan | Cylindrical; 7.7 kg 77.4 × 29 × 8.5 cm | 15 m | 1200 € | Wireless; no real time video/data | Single propeller + Rudder Ballast tank | Re-surfaces when lost connection | 3 kg; No (closed source) 1 h; replace time-consuming |
| OpenROV 2.7, OpenROV, Berkeley, USA | Cubical; 2.6 Kg 30 × 20 × 15 cm | 100 m | 900 € | Tethered, real time video and navigation data | 3 propellers 1 Vertical propeller | Auto-depth and heading hold; | 3 kg; Yes 1.5h; replaceable |
| PowerRay, Powervision, Beijing, China | Flat; 3.8 Kg 46.5 × 27 × 12.6 cm | 70 m | 2000 € | Tethered. real time video and navigation data | 3 propellers 1 Vertical propeller | Auto-depth hold | 0 kg; No (closed source) 1 h; Not replaceable |
| BlueROV2, BlueRobotics, Torrance, USA | Cubical; 10 kg 45.7 × 33.8 × 25.4 cm | 100 m | 3000 € | Tethered, real time video and navigation data | Vectored (4 + 2) 2 Vertical propellers | Auto-depth and heading hold; | 8 Kg; Yes 2 h; Replaceable |
| Sibiu Nano, Nido Robotics, Murcia, Spain | Cubical; 5.15 kg 23.7 × 25.8 × 35 cm | 100 m | 1600 € | Tethered, real time video and navigation data | Vectored (4 + 2) 2 Vertical propellers | Auto-depth and heading hold; | 5 kg; Yes 1.5 h; Replaceable |
| BlueROV Heavy, BlueRobotics, Torrance, USA | Cubical; 11.5 kg 57.5 × 25.3 × 45.7 cm | 100 m | 3500 € | Tethered, real time video and navigation data | Vectored (4 + 4) 4 Vertical propellers | Auto-depth and heading hold | 15 kg; Yes 2 h; Replaceable |
| Gladius, Chasing, Shenzhen, China | Flat; 3.2 kg 43.2 × 27 × 11.4 cm | 100 m | 2000 € | Tethered, real time video and navigation data | 3 propellers 1 Vertical propeller | Auto-stabilization, Wi-Fi buoy | 0 Kg; No (closed source) 1 h: Not replaceable |
| Name | Manufacturer/Location | Type | Parameters/Specifications |
|---|---|---|---|
| Troll 9500 | In-Situ, Fort Collins, USA | Multi-parameter probe | Dissolved oxygen, turbidity, pH, nutrients (ion-selective electrodes) |
| CTD Diver | Van Essen Instruments, Delft, The Netherlands | Multi-parameter probe | Electrical conductivity, temperature, pressure |
| AP2000 | Aquaread, Broadstairs, UK | Multi-parameter probe | Dissolved oxygen, turbidity, pH, temperature, nutrients (ion-selective electrodes) |
| MiniDOT Logger | PME, Vista, USA | Multi-parameter probe | Dissolved oxygen, temperature |
| GoPro 3+ and 5 | GoPro, San Mateo, USA | Camera (Submersible) | 40m depth rating |
| Algae Wader TriLux | Chelsea Technologies, Molesey, UK | Algae sensor | Chlorophyll-a, phycocyanin/phycoerythrin, turbidity |
| Algae Torch | Bbe Moldaenke, Schwentinental, Germany | Algae sensor | Chlorophyll-a, phycocyanin/phycoerythrin |
| eTrex 30x | Garmin, Olathe, USA | Handheld GPS logger | Logs GPS coordinates |
| Lumen Subsea Light | Blue Robotics, Torrance, USA | Lights for integration in ROV | 1500 lumen; dimmable control |
| Light | ScubaPro, Racine, USA | Diving light | Designed for scuba diving; |
| Typhoon SkyView | Yuneec, Jiangsu, China | VR/FPV headset | First person view HDMI screen |
| Name | Type | Water System | Location(s) | Period |
|---|---|---|---|---|
| Gemeente Groningen | Municipality | Urban ponds, canals/waterways | Floresvijver (Groningen) | 2015–2017 |
| Provincie Overijssel | Province (regional) | Waterways/quay walls | Almelo/Coevorden | 2017, 2018 |
| Rijkswaterstaat, | Ministry | Rivers; Waterways | Nieuwe Waterweg | 2014 |
| Waterschap Hunze en Aas | Water Authority | Lake, waterway | Zuidlaardermeer; Termunterzijldiep | 2016 |
| Natuurmonumenten | Nature Conservation | Natural Reserves | Tiengemeten | 2015 |
| Gemeente Leeuwarden | Municipality | Urban canals; | Leeuwarden | 2017 |
| Hoogheemraadschap van Delfland | Water Authority | Lakes; pond; culvert, | Delftshout; Kruithuis, Naaldwijk | 2015; 2018 |
| Waternet | Water Authority | Lake, lock, pumping station | Sloterplas; Nigtevecht; Weesp. | 2015; 2019 |
| Hoogheemraadschap Hollands Noorderkwartier | Water Authority | Lake | Twiske | 2018 |
| Waterschap Noorderzijlvest | Water Authority | Canals, Lake | Paterswoldsemeer | 2017 |
| Waterschap Zuiderzeeland | Water Authority | Lake, urban canal | Zeewolde, Urk, Weerwater, Bovenwater | 2016 |
| Waterschap Rijn en IJssel | Water Authority | Lock, pumping station, River | Ijssel River; Doetinchem (de Pol) | 2016; 2019 |
| Waterschap Brabantse Delta | Water Authority | Waste water treatment plant | Rijen | 2019 |
| Waterschap De Dommel | Water Authority | Waste water treatment plant | RWZI Eindhoven | 2016 |
| Wetterskip Fryslân | Water Authority | Lake | De Leien, Sneekermeer | 2017; 2018 |
| Waterschap Drents Overijsselse Delta | Water Authority | Constructed Wetland | Oude Diep, Drenthe | 2015 |
| (i) Workshops and Conferences | (ii) Pilot Planning Meeting |
Objectives:
|
Objectives:
|
| (iii) During Field Measurements | (iv) Discussion of Results |
Objectives:
|
Objectives:
|
| Location; Type; Nature of Pilot | Aim and Outcomes | Main Challenges |
|---|---|---|
| Tiengemeten, Natural reserve Ecological scan | Identification of fish and characterization of local habitats | Water too shallow for operation of the submarine |
| Nieuwe waterweg, Waterway Ecological scan | Underwater footage of fish and sediments | Low underwater visibility; strong currents/waves difficult operation of drone |
| Sloterplas, Lake Water quality + eco-scan | Benthic/Quaggamussels survey allowed estimation of the coverage of the bottom of the lake. Images matched with dissolved oxygen concentrations | Difficult to retrieve the position of each measurement (no GPS underwater) |
| Naaldwijk, Culvert Water quality; Inspection | Underwater drone successfully entered up to 30m of culvert. Sudden variation in water quality data indicates the presence of illicit discharge | Concern about being unable to retrieve drone if stuck inside culvert |
| Kruithuis, Surface water Water quality + eco-scan | Spatial mapping of water quality parameters | Shallow water; battery depleted fast and not possible to replace batteries |
| Floresvijver, Urban pond Water quality | Mapping of dissolved oxygen concentrations in the pond allows one to assess the effectiveness of the aeration measure | Shallow water; balancing of drone with sensors |
| Noorderhaven, Urban Port Water quality; Inspection | The use of underwater drones allowed easy access and data collection underneath floating houseboats | Concerns about drone getting stuck in unknown obstacles and/or mooring system of floating objects |
| Termunterzijldiep, Canal Water quality | Salt intrusion in canal mapped by performing transect along canal that showed the variation of electrical conductivity | Not possible to perform long distance scans with tethered ROVs |
| Complex de Pol, Sluice/Weir Inspection | Underwater images of the condition of the sluice mechanism, and of the position of energy dissipation rocks | Low visibility due to turbid water; difficult to match video footage with the real position of drone |
| Ijssel, River Water quality | Water quality data collected across the river in along transversal transects, and near margins | Strong currents push drone downstream, making maneuverability impossible |
| Delftsehout, Lake Water quality + eco-scan | Identification of fish species, characterization of aquatic vegetation and mapping/profiling of water quality | Boat with drone operator needed to position ROV in the middle of the lake |
| Twiske, Lake Water quality | Mapping and profiling of water quality, including the variation of chlorophyll-a and blue/green algae concentrations with water depth. | Limited tether range; limited number of parameters |
| Ijsselmeer, Lake Water quality | Unique dataset of three-dimensional water quality data at different moments of the day (day/night comparison) | Lack of knowledge about the exact position of outlet; measurements during the night difficult to perform logistically |
| Zeewolde, Urban Canals Water quality | Mapping of spatial distribution of different water quality parameters | Length of tether cable unsuitable for the length of canals to be monitored: time consuming task |
| Bovenwater, Lake Water quality | Mapping of spatial distribution of different water quality parameters | Limited number of parameters needed for WFD |
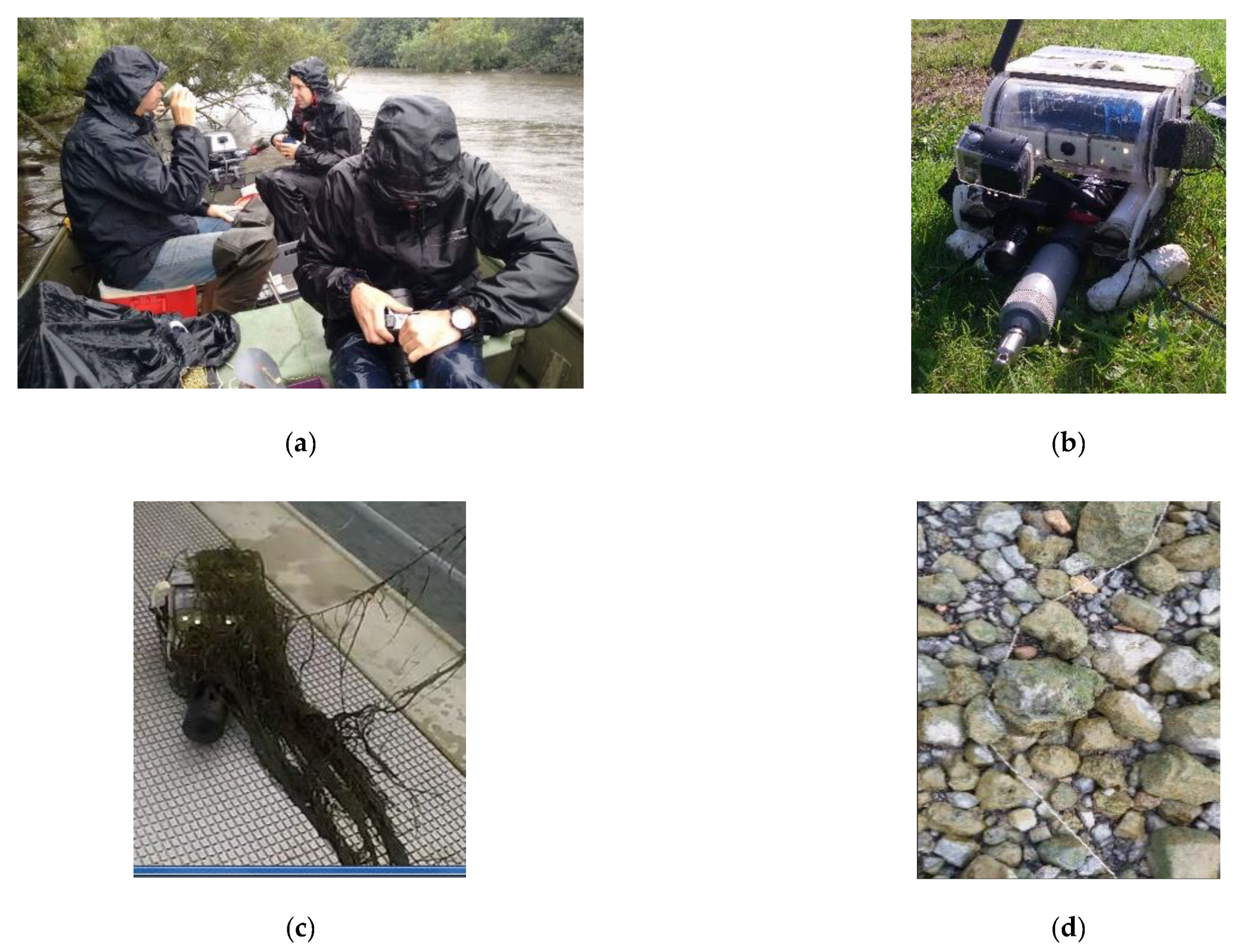
| Zuidlaardermeer, Lake Water quality | Comparison of average of water quality parameters values between different zones of the lake | Bad weather (heavy rain) complicates operation and threatens the electronics needed for the test |
| Weerwater, Lake Water quality + eco-scan | Clear visualization of thermocline and stratification of the lake | Dense vegetation occasionally blocks drone thrusters |
| Sneekermeer/De Leiein, Lakes Water quality | Mapping of water quality parameters, and underwater scan of macrophyte growth | Problems with nutrient sensor: sensor data start drifting shortly after calibration |
| Nigtevecht/Weesp, Lock Inspection | Underwater images of submerged infrastructure, which were heavily covered in biofouling and bivalve communities | Currents generated by boat traffic cause difficult maneuverability |
| Almelo, Waterway Inspection | Detailed underwater inspection in points of interest that had been previously identified with other methods (sonar scanning) | Limited tether length and battery life hinders effective scan of several km of quay walls, limited visibility |
| Leeuwarden, Urban canals Water quality | Detailed mapping of water quality in the vicinity of sewage overflow outlets, to detect the impact/reach of overflowing events | Need for quick deployment of the drone during/shortly after high intensity precipitation events (often unpredictable) |
| Paterswoldsemeer, Lake Water quality | Combination and comparison of water quality mapping with quality of sediments measured using other methods (gamma-ray spectrometer) | Time-consuming task to measure water quality across the whole lake: limited range of the tether/umbilical |
| Rijen, WWTP Inspection | Underwater images showed unexpected sedimentation patterns, indicating erratic functioning of the sedimentation tank | Low visibility near the center of the sedimentation tank |
| Eindhoven, WWTP Water quality | Baseline three-dimensional measurements of dissolved oxygen near/downstream of outlet before implementation of oxygenation measures | Lack of accurate positioning of drone makes repetition of measurements in follow-up measuring campaigns difficult |
| Oude Diep, Wetland Water quality + eco-scan | Measurement of water quality conditions in different parts of the filter; insight into aquatic life from underwater images | Not possible to sail through parts of the filter due to tall vegetation |
| Type of Data | Result Impression |
|---|---|
| Depth profiles of the concentration of water quality parameters collected during the field tests |  |
| Water quality maps (at the water surface, or at specific depth range) |  |
| Underwater image of fish/vegetation Contrasting underwater environments with different levels of density of aquatic vegetation | 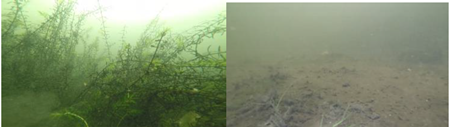 |
| Underwater images of aquatic fauna (fish, benthic organisms [32]) | 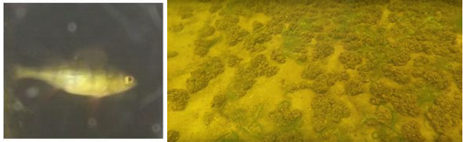 |
| Images of submerged infrastructure (remote inspection) |  |
| Navigation/Operation | Data | Practicability |
|---|---|---|
|
|
|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Lima, R.L.P.; Boogaard, F.C.; de Graaf-van Dinther, R.E. Innovative Water Quality and Ecology Monitoring Using Underwater Unmanned Vehicles: Field Applications, Challenges and Feedback from Water Managers. Water 2020, 12, 1196. https://doi.org/10.3390/w12041196
de Lima RLP, Boogaard FC, de Graaf-van Dinther RE. Innovative Water Quality and Ecology Monitoring Using Underwater Unmanned Vehicles: Field Applications, Challenges and Feedback from Water Managers. Water. 2020; 12(4):1196. https://doi.org/10.3390/w12041196
Chicago/Turabian Stylede Lima, Rui L. Pedroso, Floris C. Boogaard, and Rutger E. de Graaf-van Dinther. 2020. "Innovative Water Quality and Ecology Monitoring Using Underwater Unmanned Vehicles: Field Applications, Challenges and Feedback from Water Managers" Water 12, no. 4: 1196. https://doi.org/10.3390/w12041196
APA Stylede Lima, R. L. P., Boogaard, F. C., & de Graaf-van Dinther, R. E. (2020). Innovative Water Quality and Ecology Monitoring Using Underwater Unmanned Vehicles: Field Applications, Challenges and Feedback from Water Managers. Water, 12(4), 1196. https://doi.org/10.3390/w12041196