Identification of Water Body Extent Based on Remote Sensing Data Collected with Unmanned Aerial Vehicle


Abstract
1. Introduction
2. Materials and Methods
2.1. Test Sites and Data Collection
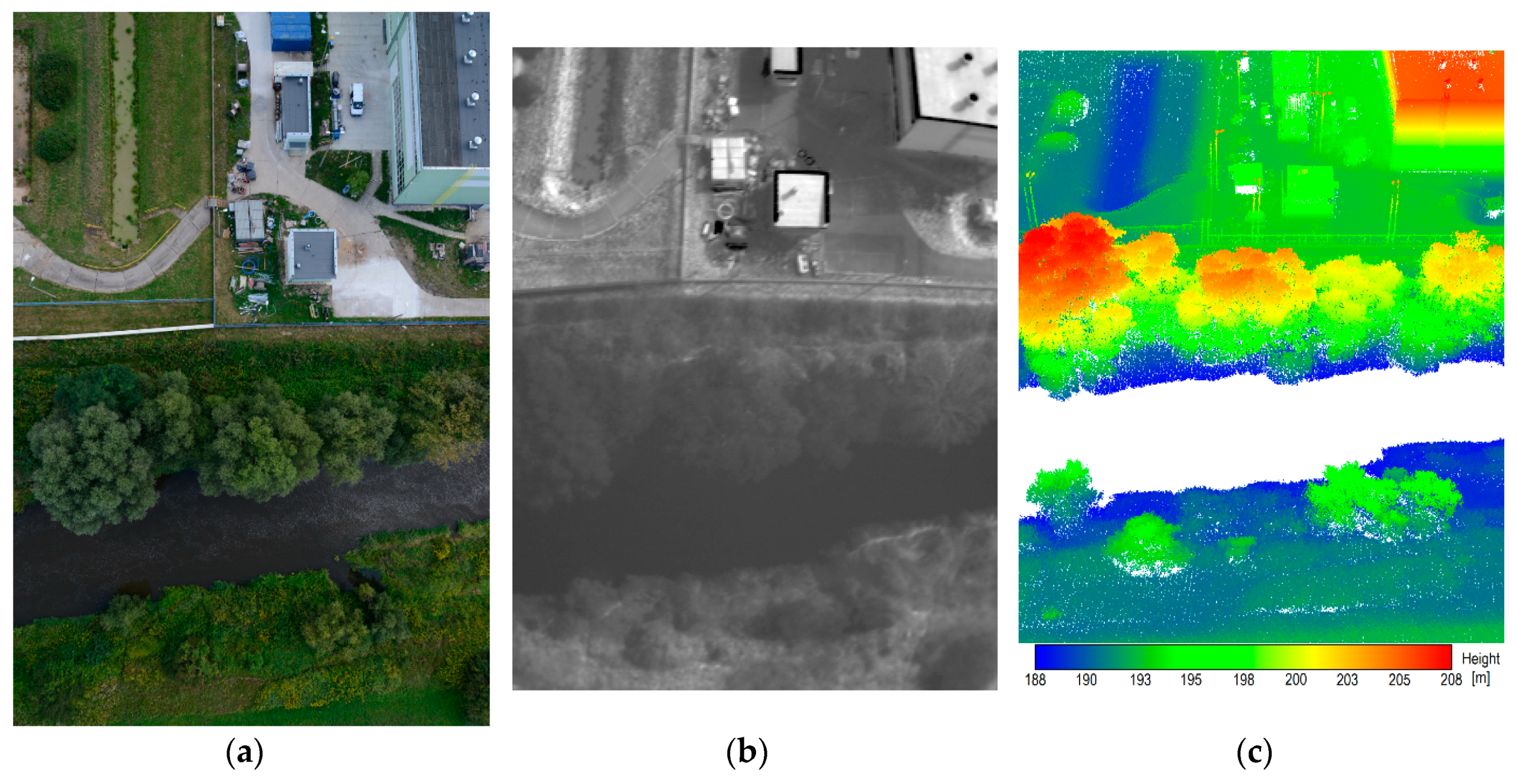
- RGB camera: Nikon D800 + Nikkor AF-S 24-85 mm f/3.5–4.5G ED VR (Nikon Corporation, Shinagawa, Tokyo, Japan),
- TIR camera: Optris PI Lightweight 450 (Optris GmbH, Berlin, Germany) and
- Laser scanner (LiDAR): Velodyne HDL-32E (Velodyne LiDAR, San Jose, California, United States).
2.2. Data Preprocessing
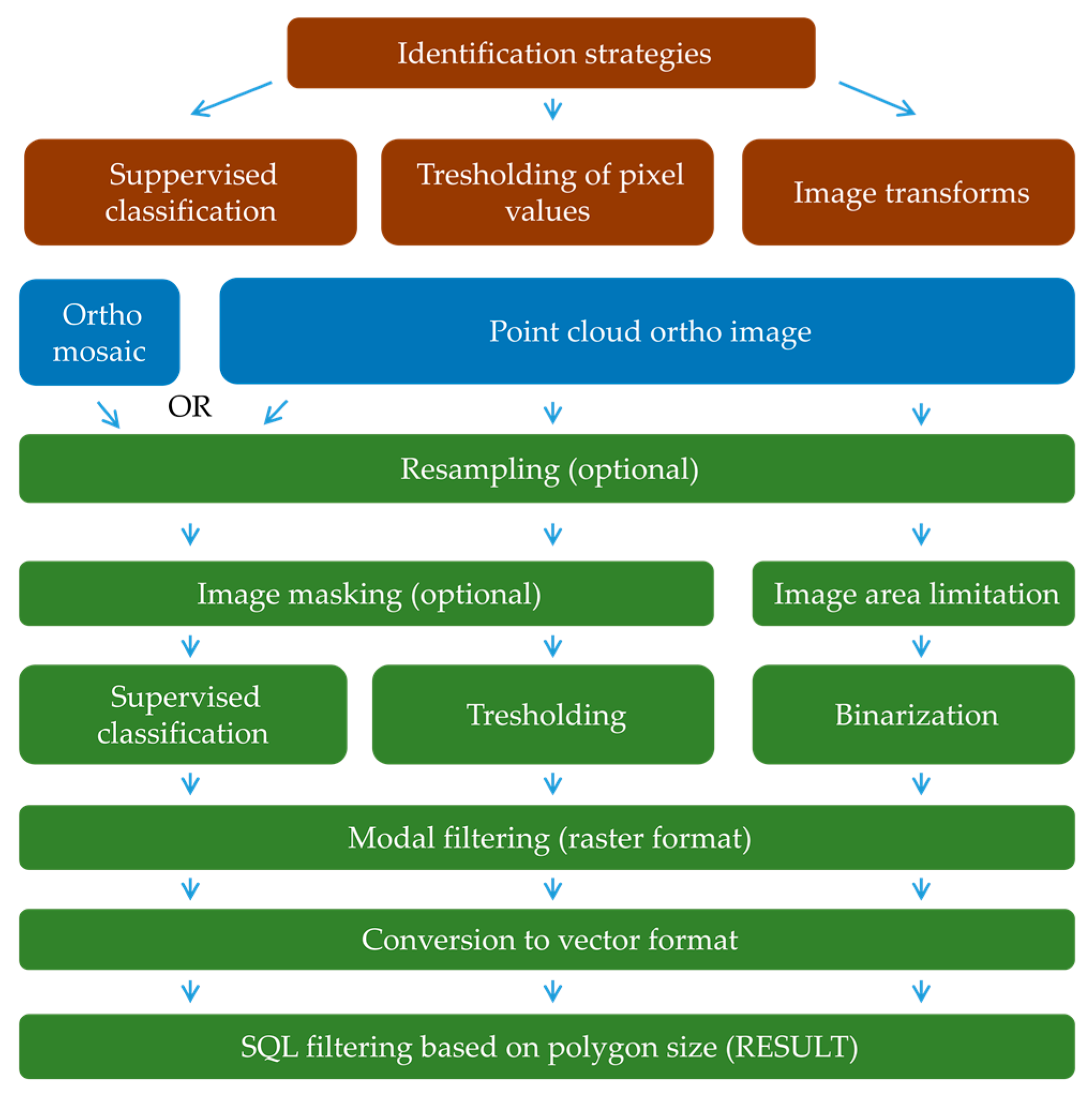
2.3. Strategies of Water Body Range Estimation
- supervised classification,
- thresholding of pixel values, and
- image transforms.
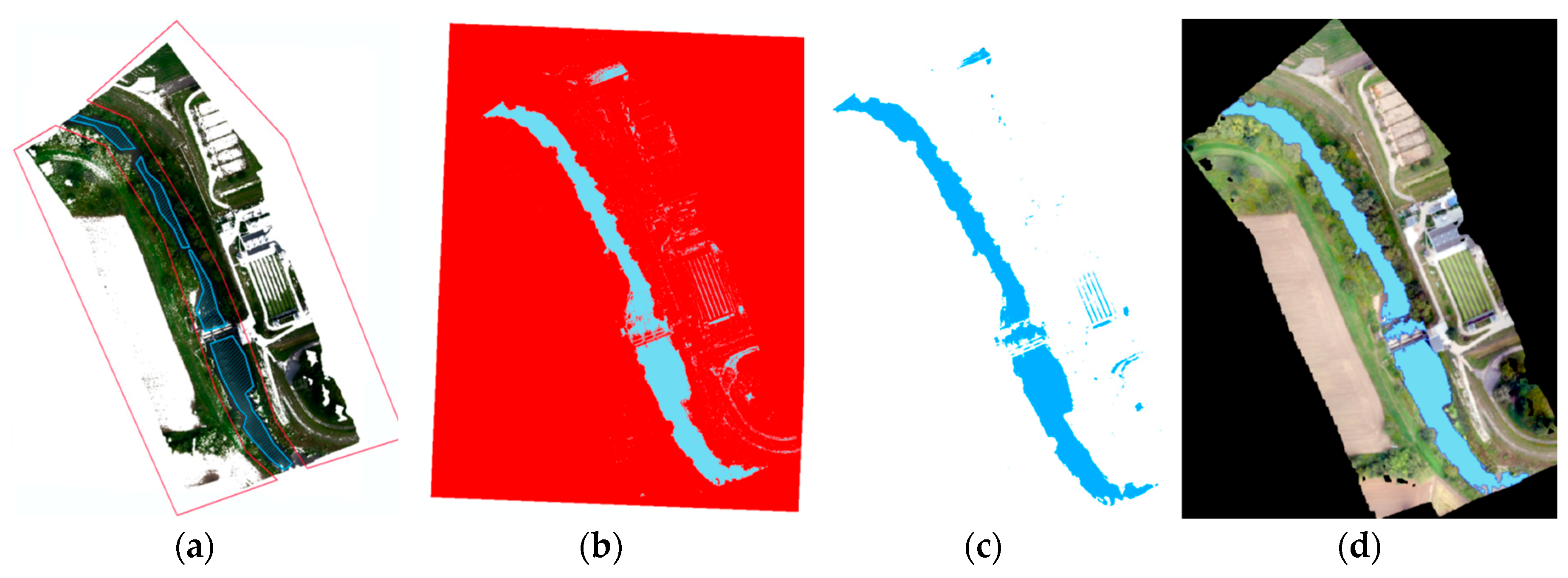
2.3.1. Strategy 1: Supervised Classification
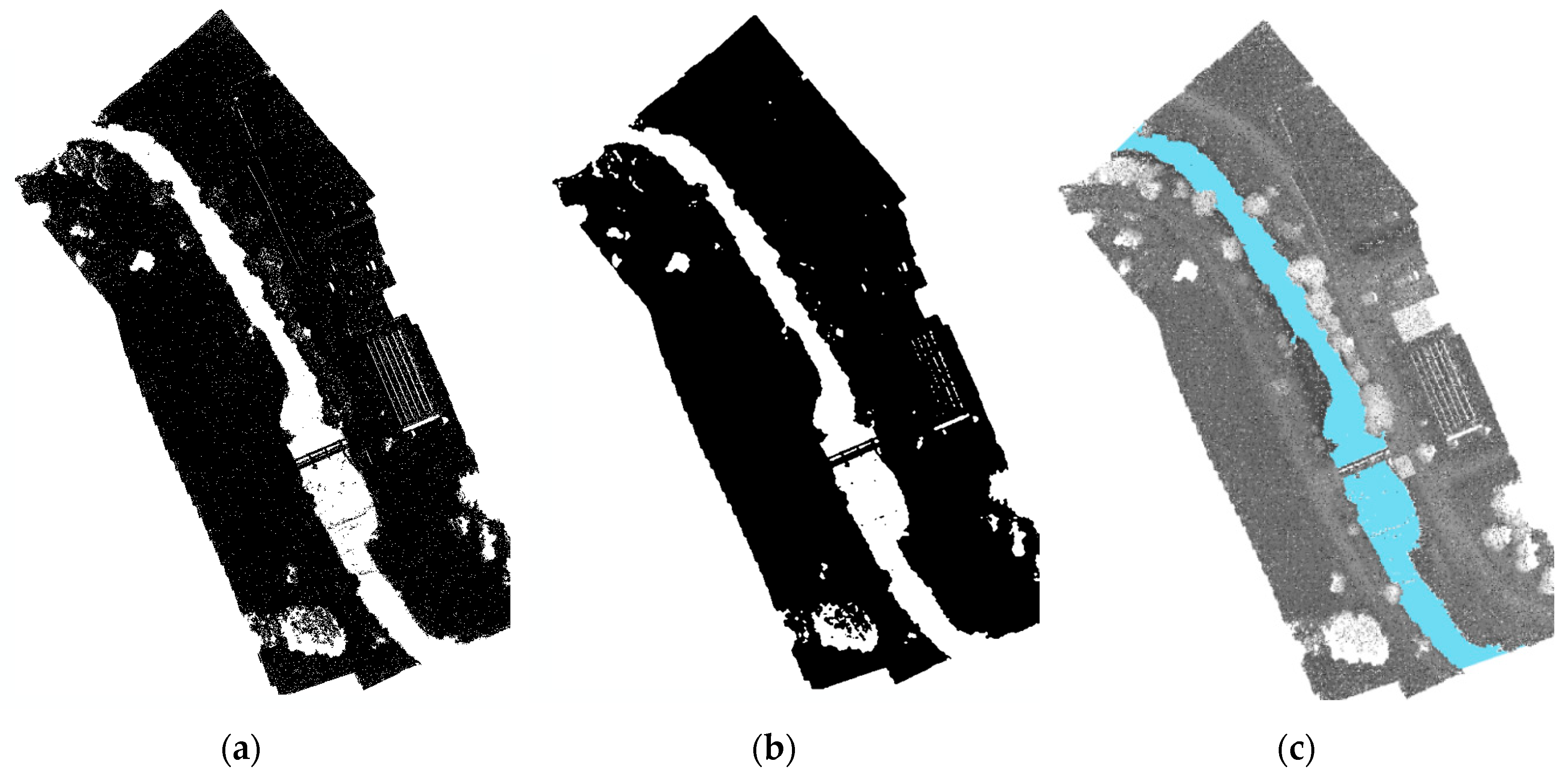
2.3.2. Strategy 2: Thresholding of Pixel Values
2.3.3. Strategy 3: Image Transforms
2.3.4. Evaluation of Identification
- User accuracy uw for the class Water:
- Producer accuracy pw for the class Water:
- Overall accuracy d:
- Kappa coefficient :where , TP is the number of analyzed objects correctly recognized by the classifier, FN is the number of analyzed objects incorrectly recognized by the classifier as remaining objects, FP is the number of remaining objects incorrectly recognized by the classifier as analyzed objects, and TN is the number of remaining objects correctly recognized by the classifier.
2.3.5. Geometrical Accuracy Assessment
3. Results and Discussion
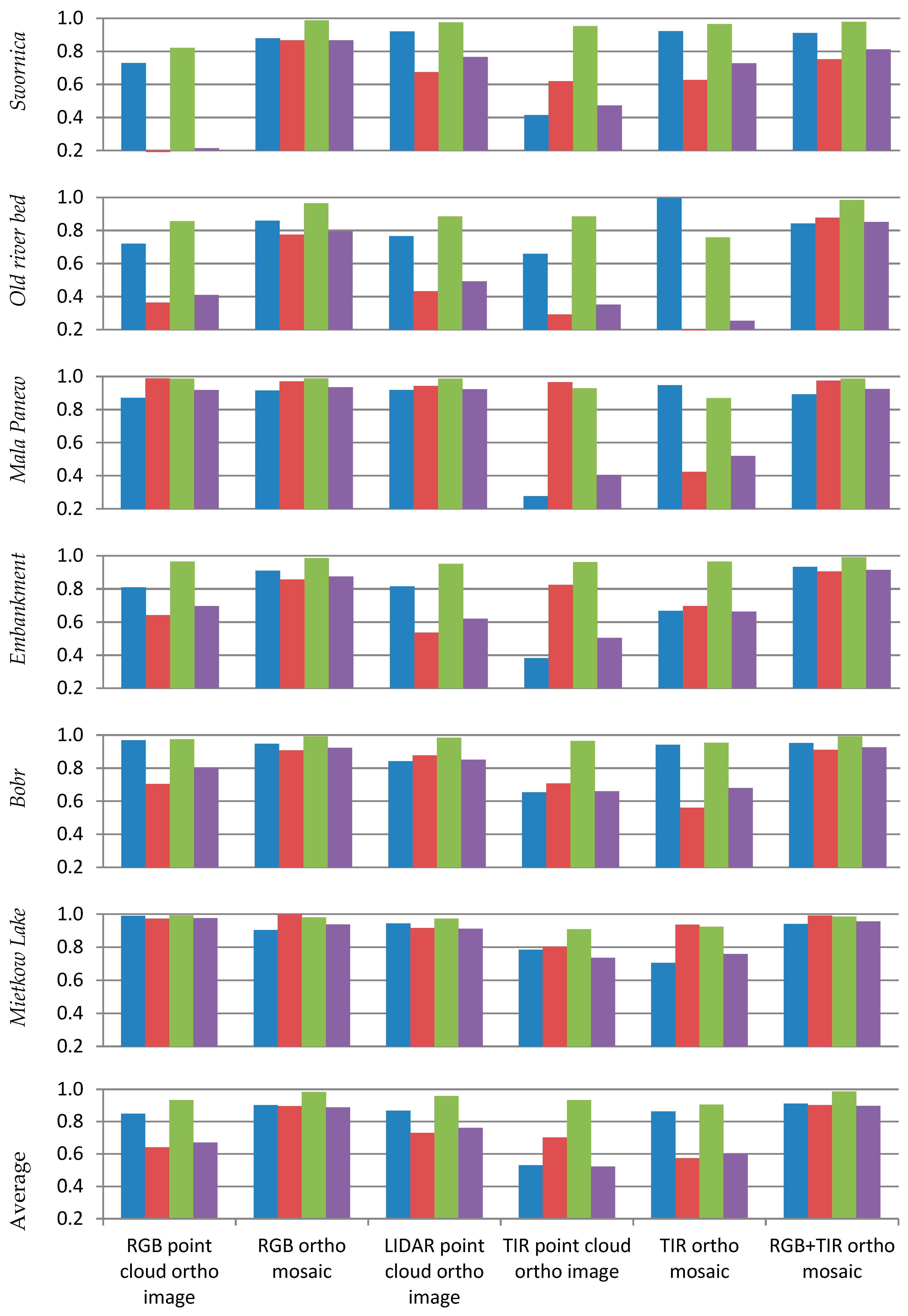
3.1. Identification of Water Body Range
3.2. Geometrical Accuracy of Identified Water Body Range
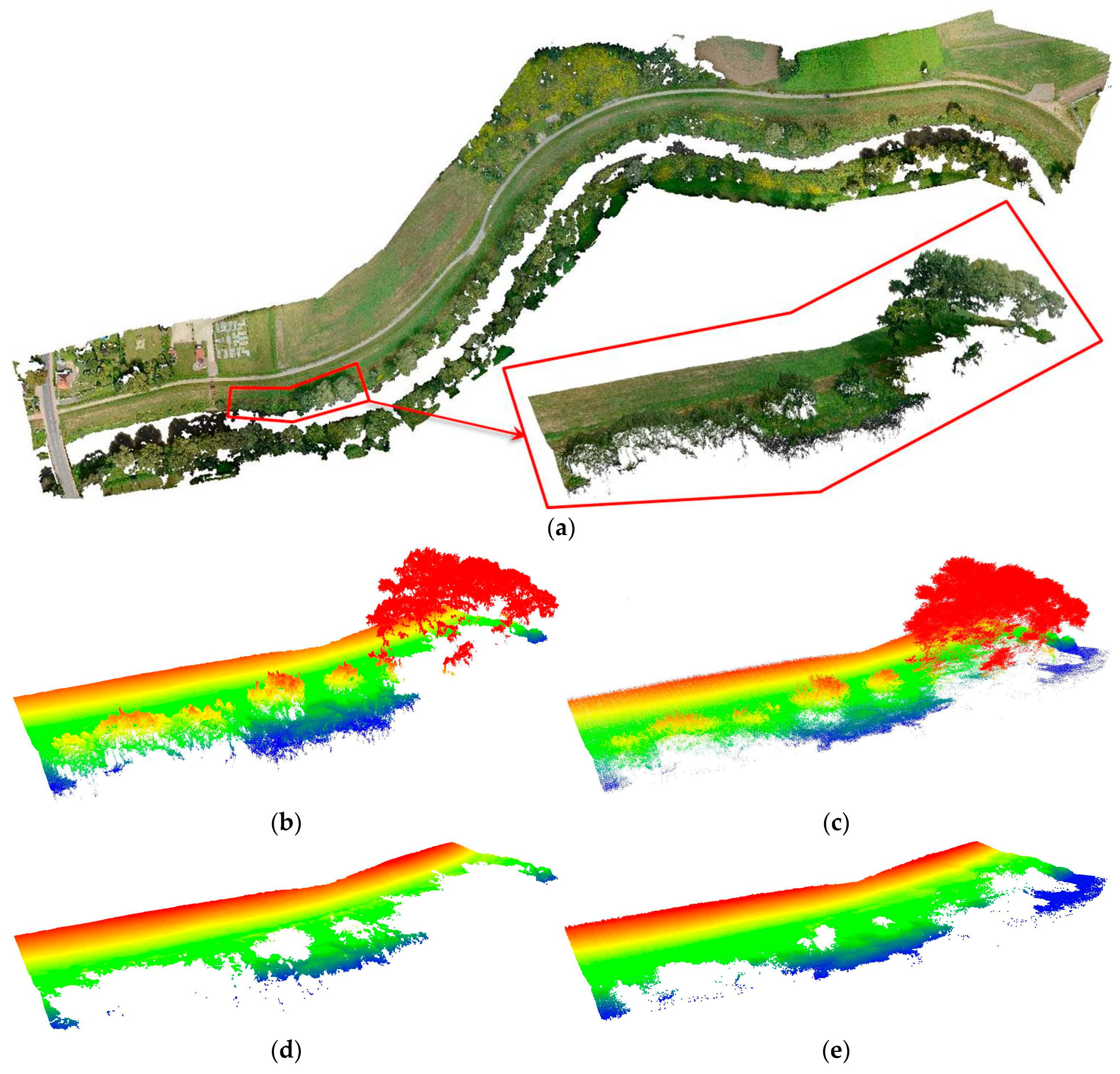
3.3. Potential of LiDAR Sensor in Vegetated Areas
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Casado, M.R.; Gonzales, R.B.; Wright, R.; Bellamy, P. Quantifying the Effect of Aerial Imagery Resolution in Automated Hydromorphological River Characterisation. Remote Sens. 2016, 8, 650. [Google Scholar] [CrossRef]
- Vaughan, I.P.; Diamond, M.; Gurnell, A.M.; Hall, K.A.; Jenkins, A.; Milner, N.J.; Naylor, L.A.; Sear, D.A.; Woodward, G.; Ormerod, S.J. Integrating ecology with hydromorphology: A priority for river science and management. Aquat. Conserv. Mar. Freshw. Ecosyst. 2009, 19, 113–125. [Google Scholar] [CrossRef]
- European Commission Directive 2007/60/EC of the European Parliament and of the Council of 23 October 2007 on the Assessment and Management of Flood Risks. Retrieved 24 February 2017. Available online: http://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex:32007L0060 (accessed on 15 February 2019).
- Pesaresi, M.; Ehrlich, D.; Kemper, T.; Siragusa, A.; Florczyk, A.; Freire, S.; Corbane, C. Atlas of the Human Planet 2017: Global Exposure to Natural Hazards; Joint Research Centre, Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- Tymków, P.; Borkowski, A. Land cover classification using airborne laser scanning data and photographs. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 185–190. [Google Scholar]
- Tymków, P.; Borkowski, A. Vegetation modelling based on TLS data for roughness coefficient estimation in river Valley. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 309–313. [Google Scholar]
- Tymków, P.; Karpina, M.; Borkowski, A. 3D GIS for flood modelling in river valleys. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 175–178. [Google Scholar] [CrossRef]
- Wang, X.; Xie, H. A review of applications of remote sensing and geographic information systems (GIS) in water resources and flood risk management. Water 2018, 10, 608. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. Urban Flood Mapping Based on Unmanned Aerial Vehicle Remote Sensing and Random Forest Classifier—A Case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Jiang, H.; Feng, M.; Zhu, Y.; Lu, N.; Huang, J.; Xiao, T. An Automated Method for Extracting Rivers and Lakes from Landsat Imagery. Remote Sens. 2014, 6, 5067–5089. [Google Scholar] [CrossRef]
- Lu, S.; Wu, B.; Wang, H. Water body mapping method with HJ-1A/B satellite imagery. Int. J. Appl. Earth Observ. Geoinf. 2011, 13, 428–434. [Google Scholar] [CrossRef]
- Wang, K.; Zhu, Y. Recognition of water bodies from remotely sensed imagery by using neural network. Int. J. Image Process. 2010, 3, 265–384. [Google Scholar]
- Toth, C.; Jóźków, G. Remote sensing platforms and sensors: A survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Nath, R.K.; Deb, S.K. Water-Body Area Extraction from High Resolution Satellite Images—An Introduction, Review, and Comparison. Int. J. Image Process. 2010, 3, 353–372. [Google Scholar]
- Xie, C.; Zhang, J.; Huang, G.; Zhao, Z.; Wang, J. Water Body Information Extraction from High Resolution Airborne SAR Image with Technique of Imaging in Different Directions and Object-Oriented. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 165–168. [Google Scholar]
- Frappart, F.; Bourrel, L.; Brodu, N.; Riofrío Salazar, X.; Baup, F.; Darrozes, J.; Pombosa, R. Monitoring of the spatio-temporal dynamics of the floods in the Guayas Watershed (Ecuadorian Pacific Coast) using global monitoring ENVISAT ASAR images and rainfall data. Water 2017, 9, 12. [Google Scholar] [CrossRef]
- Prasad, N.R.; Vaibhav, G.; Praveen, K.T. Role of SAR data in water body mapping and reservoir sedimentation assessment. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, IV-5, 151–158. [Google Scholar] [CrossRef]
- Musa, Z.N.; Popescu, I.; Mynett, A. A review of applications of satellite SAR, optical, altimetry and DEM data for surface water modelling, mapping and parameter estimation. Hydrol. Earth Syst. Sci. 2015, 19, 3755–3769. [Google Scholar] [CrossRef]
- Karpina, M.; Jarząbek-Rychard, M.; Tymków, P.; Borkowski, A. UAV-based automatic tree growth measurement for biomass estimation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B8, 685–688. [Google Scholar] [CrossRef]
- Hoefle, B.; Vetter, M.; Pfeifer, N.; Mandlburger, G. Water surface mapping from airborne laser scanning using signal intensity and elevation data. Earth Surf. Processes Landf. 2009, 34, 1635–1649. [Google Scholar] [CrossRef]
- Smeeckaert, J.; Mallet, C.; David, N.; Cheheta, N.; Ferraz, A. Large-scale classification of water areas using airborne topographic lidar data. Remote Sens. Environ. 2013, 138, 134–148. [Google Scholar] [CrossRef]
- Wu, H.; Liu, C.; Zhang, Y.; Sun, W.; Li, W. Building a water feature extraction model by integrating areal image and lidar point clouds. Int. J. Remote Sens. 2013, 34, 7691–7705. [Google Scholar] [CrossRef]
- Casado, M.R.; Gonzales, R.B.; Kriechbaumer, T.; Veal, A. Automated Identification of River Hydromorphological Features Using UAV High Resolution Aerial Imagery. Sensors 2015, 15, 27969–27989. [Google Scholar] [CrossRef] [PubMed]
- Popescu, D.; Ichim, L.; Stoican, F. Unmanned Aerial Vehicle Systems for Remote Estimation of Flooded Areas Based on Complex Image Processing. Sensors 2017, 17, 446. [Google Scholar] [CrossRef] [PubMed]
- Milani, G.; Volpi, M.; Tonolla, D.; Doering, M.; Robinson, C.; Kneubühler, M.; Schaepman, M. Robust quantification of riverine land cover dynamics by high-resolution remote sensing. Remote Sens. Environ. 2018, 217, 491–505. [Google Scholar] [CrossRef]
- Witek, M.; Jeziorska, J.; Niedzielski, T. An experimental approach to verifying prognoses of floods using an unmanned aerial vehicle. Meteorol. Hydrol. Water Manag. Res. Oper. Appl. 2014, 2, 3–11. [Google Scholar] [CrossRef]
- Tan, Y.; Wang, S.; Xu, B.; Zhang, J. An improved progressive morphological filter for UAV-based photogrammetric point clouds in river bank monitoring. ISPRS J. Photogramm. Remote Sens. 2018, 146, 421–429. [Google Scholar] [CrossRef]
- Ridolfi, E.; Manciola, P. Water Level Measurements from Drones: A pilot case study at a dam site. Water 2018, 10, 297. [Google Scholar] [CrossRef]
- Van Iersel, W.; Straatsma, M.; Middelkoop, H.; Addink, E. Multitemporal classification of river floodplain vegetation using time series of UAV images. Remote Sens. 2018, 10, 1144. [Google Scholar] [CrossRef]
- Wang, Y. Advances in Remote Sensing of Flooding. Water 2015, 7, 6404–6410. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Malenovský, Z.; King, D.H.; Robinson, S.A. Spatial co-registration of ultra-high resolution visible, multispectral and thermal images acquired with a micro-UAV over Antarctic moss beds. Remote Sens. 2014, 6, 4003–4024. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.A.; Toth, C.K.; Jóźków, G. On sensor georeferencing and point cloud generation with sUAS. In Proceedings of the Institute of Navigation, Honolulu, HI, USA, 20–23 April 2015; PACIFIC PNT: Manassas, VA, USA, 2015; pp. 839–848. [Google Scholar]
- Kraus, K. Photogrammetry—Geometry from Images and Laser Scans, 2nd ed.; Walter de Gruyter: Berlin, Germany, 2011. [Google Scholar]
- Haala, N. Multiray photogrammetry and dense image matching. In Proceedings of the Photogramm Week 2011; Wichmann Verlag: Berlin/Offenbach, Gemany, 2011; pp. 185–195. [Google Scholar]
- Chen, C. Signal and Image Processing for Remote Sensing; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Jóźków, G.; Toth, C.; Grejner-Brzezinska, D. UAS topographic map ping with VELODYNE LiDAR sensor. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 201–208. [Google Scholar] [CrossRef]
- Wendel, J.; Metzger, J.; Moenikes, R.; Maier, A.; Trommer, G.F. A performance comparison of tightly coupled GPS/INS navigation systems based on extended and sigma point Kalman filters. Navigation 2006, 53, 21–31. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonnell, R. Principles of Geographical Information Systems; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- De Castro Vitti, D.W.; Junior, A.M.; Guimarães, T.T.; Koste, E.C.; Inocencio, L.C.; Veronez, M.R.; Mauad, F.F. Geometry accuracy of DSM in water body margin obtained from an RGB camera with NIR band and a multispectral sensor embedded in UAV. Eur. J. Remote Sens. 2018. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Body/Site Name and Description | Site Map (Ortho Mosaic) |
|---|---|
Swornica
|  |
Old river bed
|  |
Mala Panew
|  |
Embankment
|  |
Bobr
|  |
Mietkow Lake
|  |
| Site | Flying Height with Cameras/Laser Scanner (m) | GSD for RGB/TIR Images (mm) | Number of RGB/TIR Images | Number of GCPs | Number of LiDAR Points |
|---|---|---|---|---|---|
| Swornica | 40/40 | 8/125 | 94/175 | 8 | 75 M |
| Old river bed | 40/40 | 8/125 | 117/117 | 8 | 95 M |
| Mala Panew | 80/40 | 16/250 | 101/103 | 6 | 50 M |
| Embankment | 80/40–60 | 16/250 | 121/134 | 7 | 66 M |
| Bobr | 50/50 | 10/156 | 110/109 | 9 | 71 M |
| Mietkow Lake | 40/40 | 8/125 | 156/302 | 12 | 62 M |
| Product | Point Cloud | Point Cloud Ortho Image | Ortho Mosaic |
|---|---|---|---|
| Dimension | 3-D | 2.5-D (raster) | 2-D (raster) |
| Ground resolution | Average point density (pts/m2) | Pixel size (cm) | Pixel size (cm) |
| RGB | 1400–3900 | 2–4 | 1–1.5 |
| LiDAR | 860–540 | 4–6 | - |
| TIR | 20–90 | 10–20 | 10–20 |
| RGB+TIR combination | - | - | 10 |
| Data Type | Product | Test Site | |||||
|---|---|---|---|---|---|---|---|
| Swornica | Old River Bed | Mala Panew | Embankment | Bobr | Mietkow Lake | ||
| RGB | Point cloud ortho image | 3 | 3 | 3 | 3 | 2 | 3 |
| Ortho mosaic | 1 | 1 | 1 | 1 | 1 | 1 | |
| LiDAR | Point cloud ortho image | 3 | 3 | 3 | 3 | 3 | 3 |
| TIR | Point cloud ortho image | 3 | 3 | 3 | 3 | 1 | 3 |
| Ortho mosaic | 1 | 1 | 1 | 1 | 1 | 1 | |
| RGB+TIR | Ortho mosaic | 1 | 1 | 1 | 1 | 1 | 1 |

| Site | Parameter | RGB Point Cloud Ortho Image | RGB Ortho Mosaic | LiDAR Point Cloud Ortho Mosaic | TIR Point Cloud Ortho Mosaic | TIR Ortho Mosaic | RGB+TIR Ortho Mosaic |
|---|---|---|---|---|---|---|---|
| Swornica | mean | 0.20 | 0.51 | 0.43 | 0.85 | 0.64 | 0.47 |
| std | 2.08 | 0.46 | 0.35 | 0.75 | 0.53 | 0.41 | |
| Old river bed | mean | 1.05 | 0,41 | 2.40 | 1.20 | 2.73 | 0.51 |
| std | 2.00 | 0.39 | 1.82 | 3.09 | 1.77 | 0.40 | |
| Mala Panew | mean | 0.67 | 0.04 | 0.25 | 2.20 | 1.26 | 0.38 |
| std | 1.40 | 1.31 | 1.39 | 2.00 | 2.37 | 1.64 | |
| Embankment | mean | 0.53 | 0.37 | 0.93 | 3.40 | 0.62 | 0.60 |
| std | 1.45 | 0.94 | 0.76 | 1.61 | 0.60 | 0.75 | |
| Bobr | mean | 1.46 | 0.40 | 0.28 | 1.74 | 1.14 | 0.45 |
| std | 1.73 | 0.26 | 1.35 | 1.19 | 0.96 | 0.36 | |
| Mietkow Lake | mean | 0.52 | 2.53 | 0.57 | 3.48 | 0.72 | 0.88 |
| std | 0.37 | 1.96 | 1.95 | 1.72 | 2.47 | 0.79 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tymków, P.; Jóźków, G.; Walicka, A.; Karpina, M.; Borkowski, A. Identification of Water Body Extent Based on Remote Sensing Data Collected with Unmanned Aerial Vehicle. Water 2019, 11, 338. https://doi.org/10.3390/w11020338
Tymków P, Jóźków G, Walicka A, Karpina M, Borkowski A. Identification of Water Body Extent Based on Remote Sensing Data Collected with Unmanned Aerial Vehicle. Water. 2019; 11(2):338. https://doi.org/10.3390/w11020338
Chicago/Turabian StyleTymków, Przemysław, Grzegorz Jóźków, Agata Walicka, Mateusz Karpina, and Andrzej Borkowski. 2019. "Identification of Water Body Extent Based on Remote Sensing Data Collected with Unmanned Aerial Vehicle" Water 11, no. 2: 338. https://doi.org/10.3390/w11020338
APA StyleTymków, P., Jóźków, G., Walicka, A., Karpina, M., & Borkowski, A. (2019). Identification of Water Body Extent Based on Remote Sensing Data Collected with Unmanned Aerial Vehicle. Water, 11(2), 338. https://doi.org/10.3390/w11020338