A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level



Abstract
1. Introduction
- Water level measuring rule is a traditional contacting measurement method, which needs manual measurement, suggesting that it is difficult to continuously measure water level for its poor automaticity. In addition, it is easily damaged under high-speed flow, and also difficult to accurately obtain the water level when water surface fluctuates intensely.
- Float-type water level gauge is suitable for low sandy flow, and the water level measuring well needs to be built for its operation [2]. Regularly adjusting the water level and cleaning up siltation in the measuring well and pipeline often results in high operating cost.
- Pressure-type water level gauge is installed underwater, thus its accuracy is affected by water impurities and wave, and its calibration process is complex, resulting in a high failure rate [3].
2. Materials and Methods
2.1. Study Site
2.2. Integrated Design of Measurement Technology
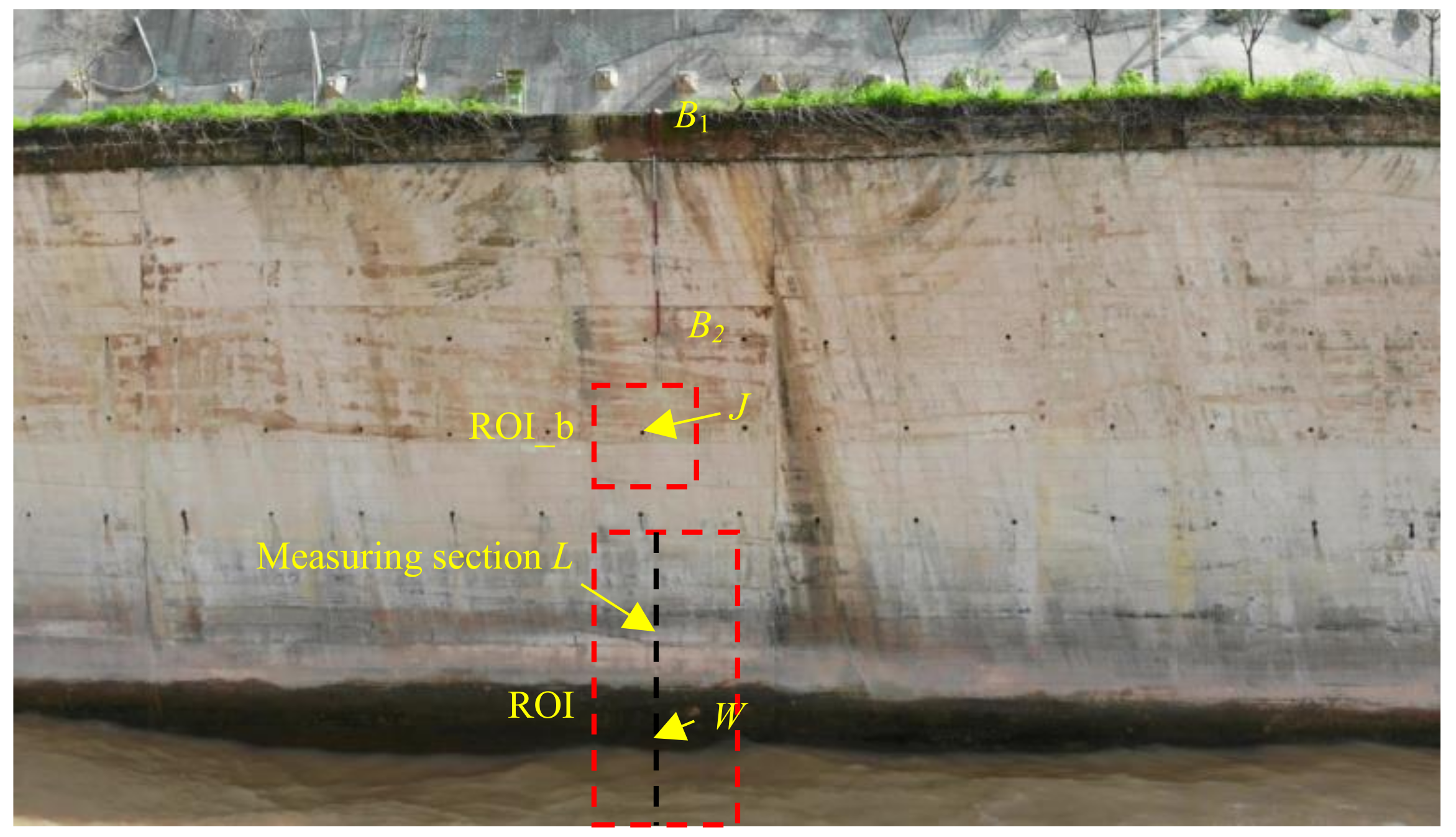
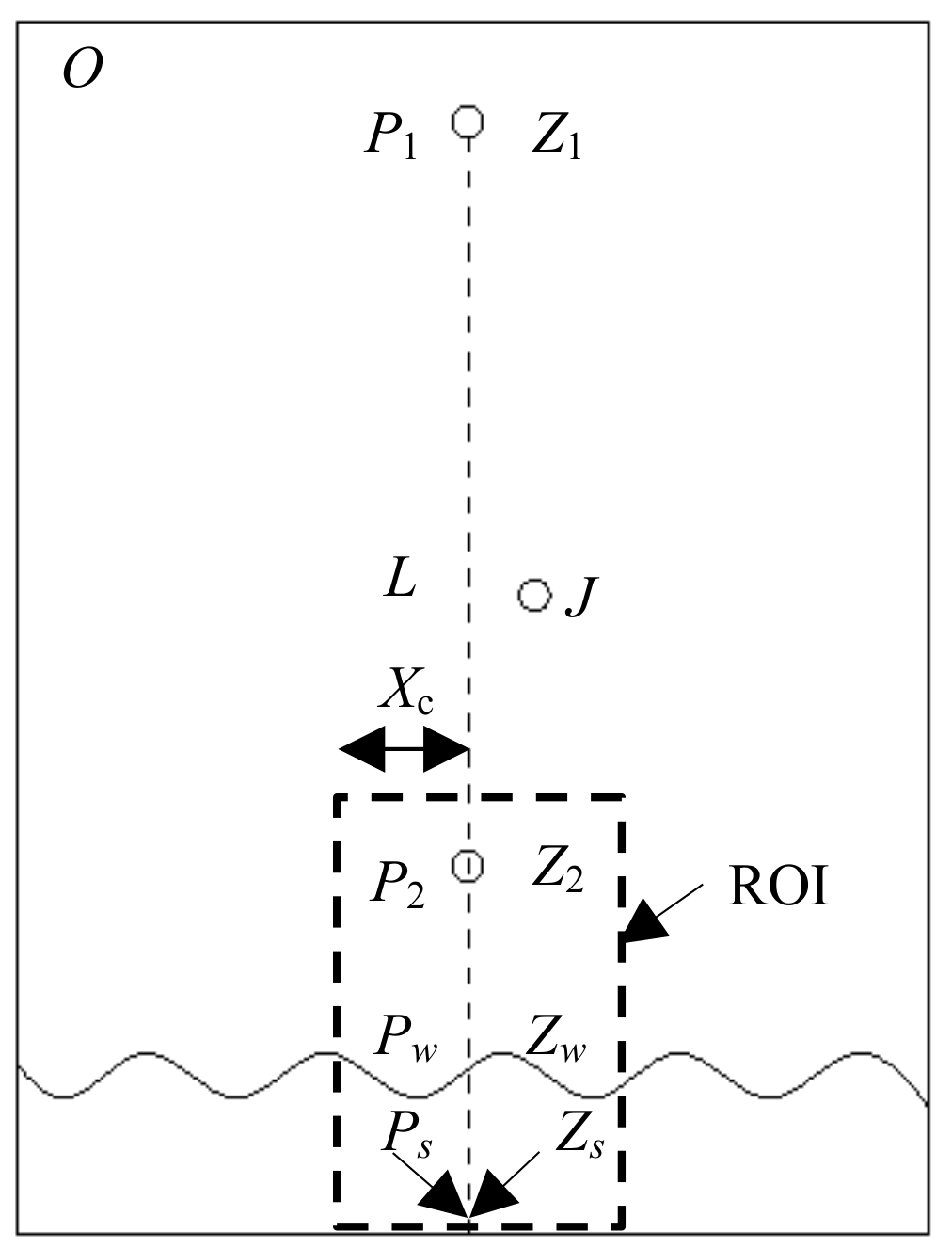
- Two calibration points (B1, B2), located at the water level measuring vertical line (L), are set on the side wall of the water level measurement section. Both points are higher than the highest water level of the measurement section, and the absolute elevations of the two calibration points (Z1, Z2) are staked out in survey, respectively. In addition, correction point (J) is also set to correct the measurement error that is caused by the UAV offset.
- UAV hover close the side wall and its airborne camera capture the water surface fluctuation processes, the selected capture area should include three points B1, B2, J, and consider the highest and lowest water level at L extension.
- According to the captured water surface fluctuation video, we used Visual Studio 2008 (VS2008) [20] combined with OpenCV [21] as the development tool under the operating platform of Windows 7. The dedicated image recognition algorithm was programmed and used to recognize the intersection point W of L and water surface in each frame image, and to calculate the actual elevation of W based on the calibration coefficient and calculation formula automatically.
2.3. UAV and Drone Camera
2.4. Implementation Process of Measurement Technology
2.4.1. Coefficient Calibration
2.4.2. Image Preprocessing
- (1)
- Extraction of ROI. In the image processing, the specific area is selected from the whole image to be processed by a box, a circle, etc., which is called a ROI, and it serves as an important preprocessing task primarily for subsequently object tracking. The ROI can reduce processing time, increase recognition accuracy, and improve processing efficiency [23]. In this study, the ROI is selected in a box manner (Figure 5 and Figure 6), and the subsequent image processing takes the ROI as the processing object. In addition, it is necessary to determine the horizontal pixel coordinate Xc of the measuring section L in the ROI area.
- (2)
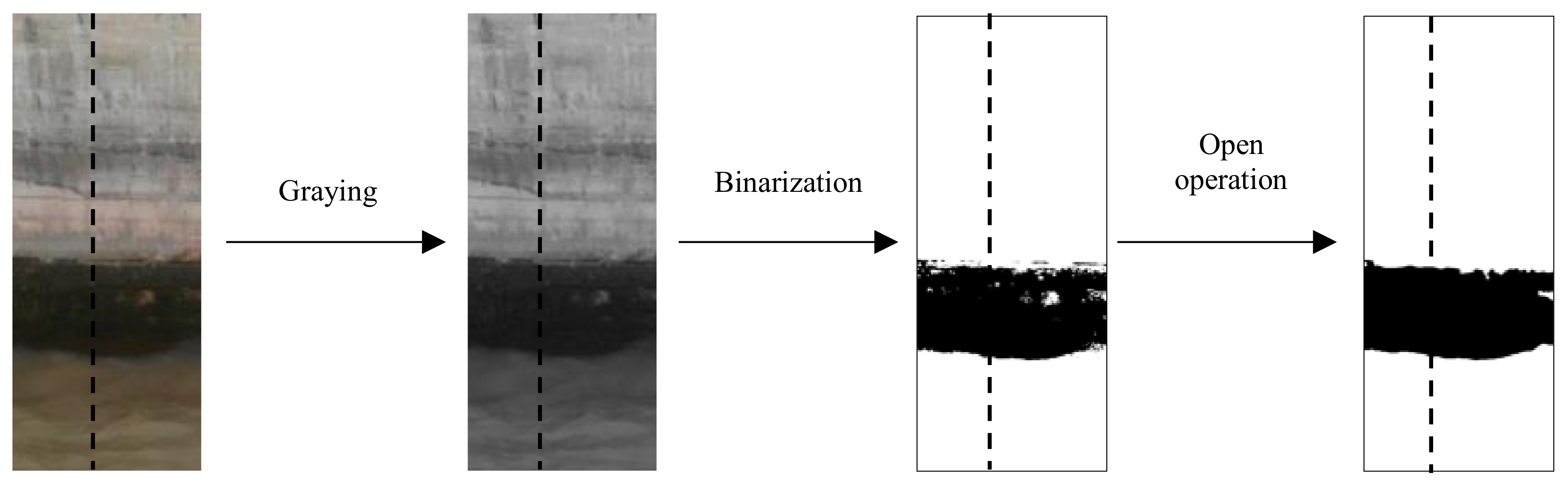
- Image graying. Images taken by UAV are always colorized (RGB), and the color of each pixel is determined by three components: red (R), green (G), and blue (B). Each component has 256 (0–255) values, and one pixel has more than 16 million color changes. Such large amount of data will reduce the efficiency of image processing. The grayscale image is calculated by calculating R, G, and B of each pixel in the colorized image, using only one numerical value (0–255) to represent the characteristics of the pixel. Grayscale image, obtained by a reasonable grayscale calculation method, can still characterize the target in the color image, and can greatly reduce the calculation task and improve the image processing efficiency. Therefore, image graying is always the critical step in many image processing tasks [24]. After comparing and selecting different gray methods, this study uses grey-scale average method to obtain gray image, which can meet the needs of subsequent processing.
- (3)
- Image binarization. Image binarization is also called as image segmentation or image thresholding [22]. The appropriate threshold is used to distinguish the target and background in the gray image, which is convenient for subsequent target extraction and parameter calculation. Selecting an appropriate threshold segmentation manner has been the subject of active research for many years [25]. In order to avoid the influence of uneven illumination on the segmentation, we used the adaptive threshold segmentation manner to obtain the threshold of the neighborhood by calculating the average value of the pixel gray value in the neighborhood of the pixel [26]. A pixel whose gray value is larger than the threshold value is determined to be one type and a gray value is set as 255. A pixel whose gray value is smaller than the threshold value is determined to be another type and its gray value is set as 0. By adjusting the threshold parameters in the algorithm, the water body and the wall are divided. The gray value of the water body area in the image after segmentation is 255, and the gray value of the wall near the water surface is 0.
- (4)
- Image open operation. After the image segmentation, the binary image generally suffers from noise or breakpoints, and this situation is especially obvious in photographs that were taken in the field [27]. In order to eliminate noise and fuse the water surface line breakpoints, the binary image is processed by the “image open operation” (consists of “erosion operation” and “dilation operation”) with a certain structuring element [28]. In this study, an ellipse structuring element (size: 2 × 2 pixel) is defined and operated on the binary image, and the desired smooth air-water interface line is obtained.
2.4.3. Offset Correction
- (1)
- Select the area containing the calibration point (J) as the ROI_b (to distinguish the aforementioned ROI).
- (2)
- Identify the calibration point (J) in the first frame ROI_b, and calculate its centroid coordinates (XJ0, PJ0), which is considered as the base coordinate for the offset correction in the subsequent ROI_b.
- (3)
- Identify the centroid coordinates (XJi, PJi) of the calibration point in the ROI_b of ith frame image.
- (4)
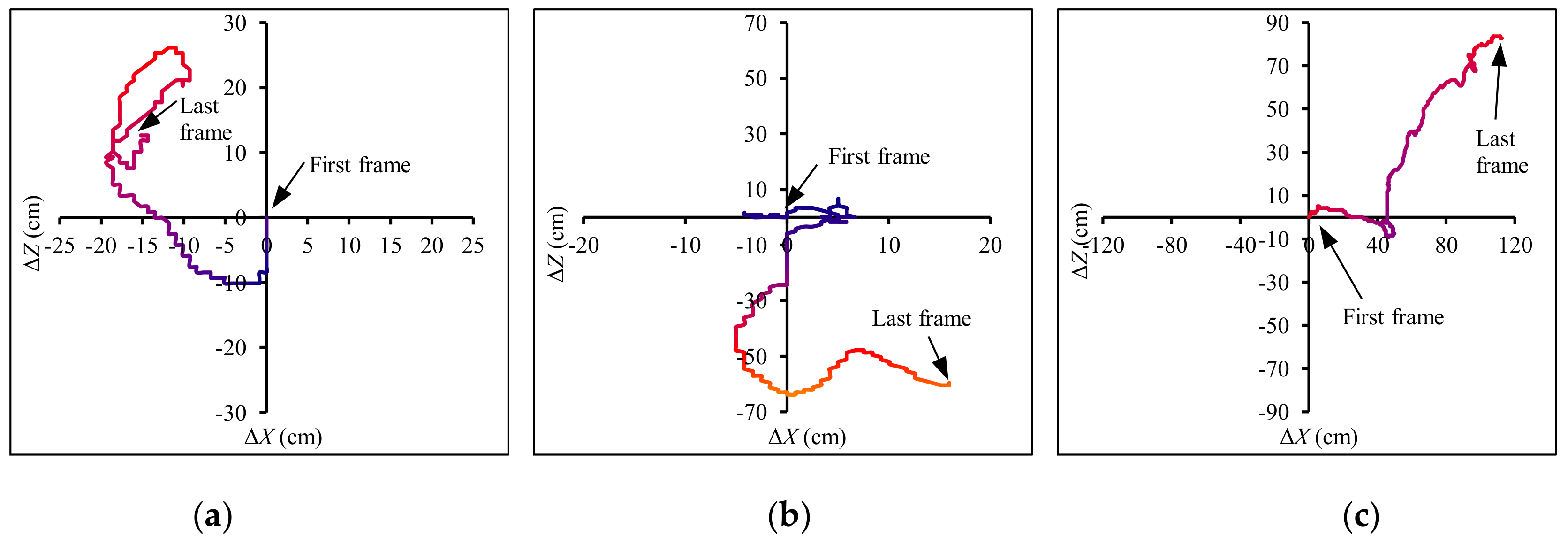
- Calculate the difference (ΔX, ΔP) between the calibration point coordinates and the base coordinates in the ROI_b of ith frame image, where ΔX = XJi − XJ0, ΔP = PJi − PJ0.
2.4.4. Water Level Identification
3. Results and Discussion
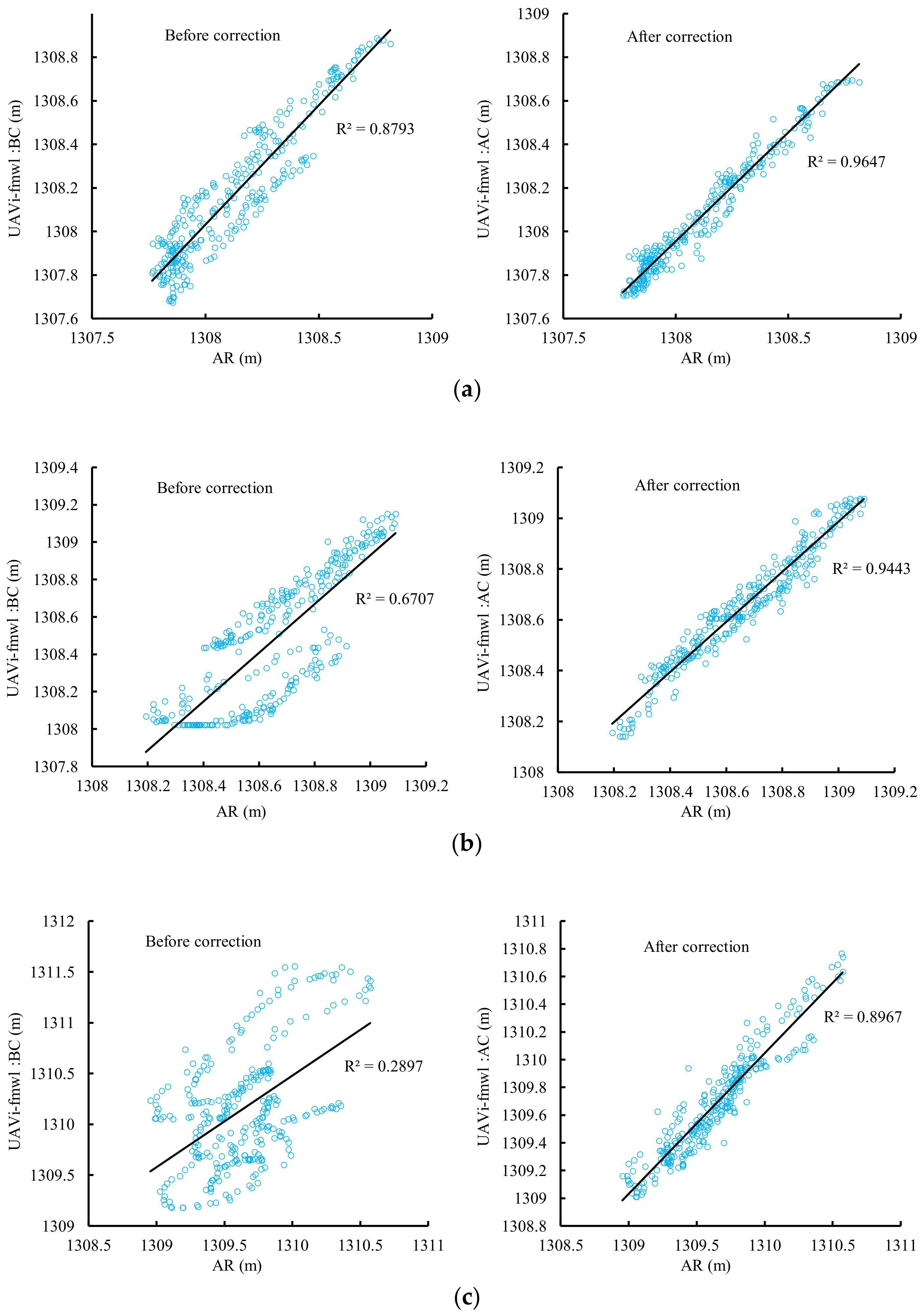
3.1. Application Assessment of UAVi-fmwl
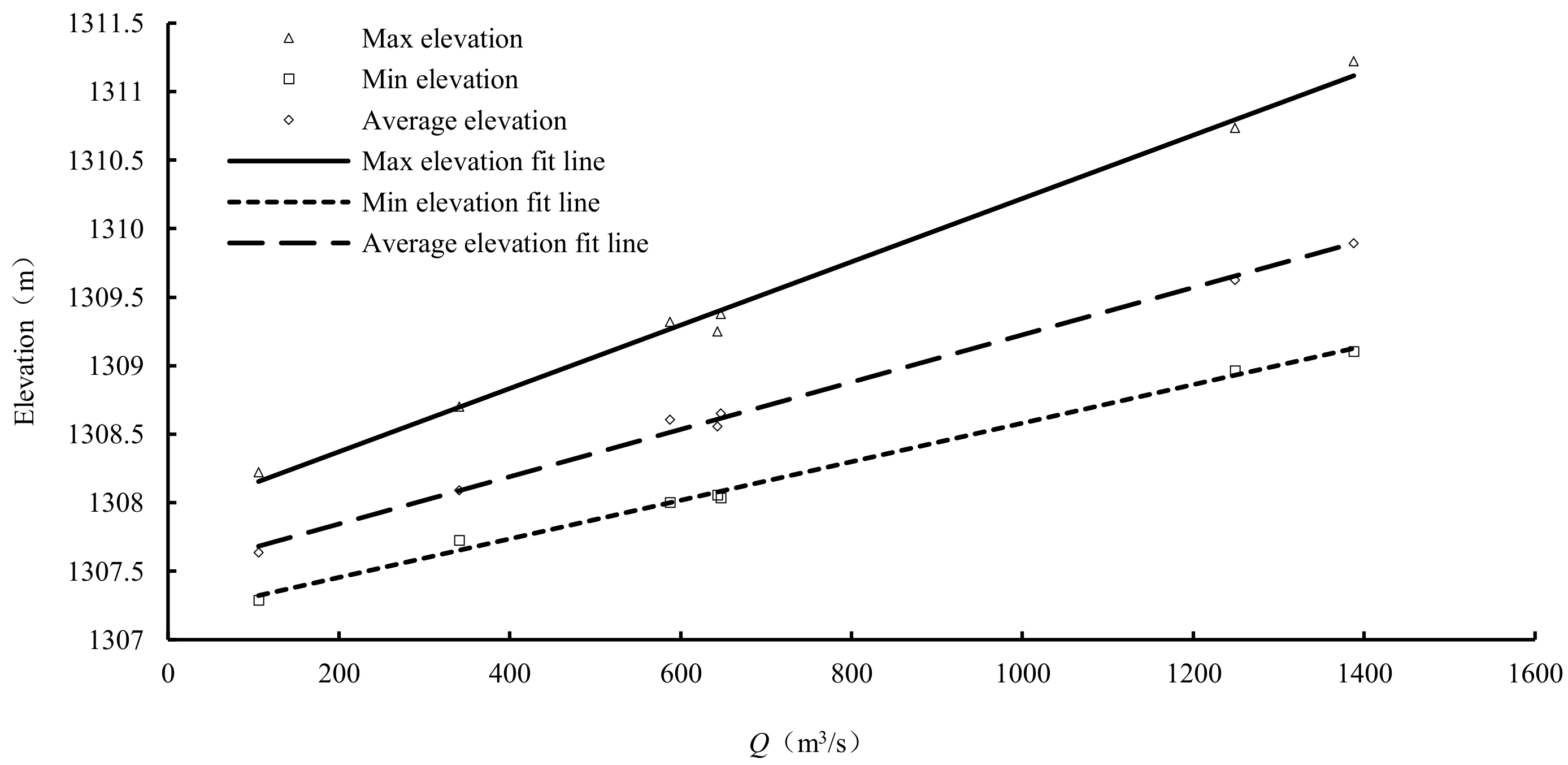
3.2. Preliminary Application of UAVi-fmwl
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Te Chow, V. Open-Channel Hydraulics; Magraw-Hill Companies, Inc.: New York, NY, USA, 1959. [Google Scholar]
- David, E.; Henry, F.; David, R.; Edward, S.; Rodney, J.; Peter, V.; Ronald, A.; Larry, R. Canal Systems Automation Manual; U. S. Department of the Interior, Bureau of Reclamation: Washington, DC, USA, 1995; Chapter 5; pp. 31–32. [Google Scholar]
- Yaul, F.M.; Bulovic, V.; Lang, J.H. A flexible underwater pressure sensor array using a conductive elastomer strain gauge. J. Microelectromech. Syst. 2012, 21, 897–907. [Google Scholar] [CrossRef]
- Su, B.; Ma, X. Water level sensor based on a new design structure for irrigation water measurement. IFAC Proc. Volumes 2010, 43, 39–44. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Melack, J.M.; Dunne, T.; Mertes, L.A.K.; Hess, L.L.; Smith, L.C. Interferometric radar measurements of water level changes on the Amazon flood plain. Nature 2000, 404, 174–177. [Google Scholar] [CrossRef] [PubMed]
- Li, H.P.; Wang, W.; Ma, F.C.; Liu, H.L.; Lv, T. The water level automatic measurement technology based on image processing. Appl. Mech. Mater. 2013, 303–306. [Google Scholar] [CrossRef]
- Li, Y.; Lan, H.Y.; Yan, H. Research on water-level recognition based on image processing and BP artificial neural network technology. Yellow River 2015, 37, 12–15. (In Chinese) [Google Scholar] [CrossRef]
- Chen, C.; Liu, Z.W.; Chen, X.S.; Luo, M.N.; Niu, Z.X.; Ruan, C. Technology of water level automatically extract based on image processing. Water Resour. Informatiz. 2016, 1, 48–55. [Google Scholar]
- Wang, X.; Xie, H.A. Review on Applications of Remote Sensing and Geographic Information Systems (GIS) in Water Resources and Flood Risk Management. Water 2018, 10, 608. [Google Scholar] [CrossRef]
- Wang, G.Y.; Yao, J.; Li, D.F.; Zhao, P. Study on application of remote sensing by unmanned aerial vehicle in hydraulic engineering survey. Geomat. Spat. Inf. Technol. 2016, 39, 113–115. (In Chinese) [Google Scholar] [CrossRef]
- Lin, J.Y.; Shu, L.; Zou, H.; Zhang, B.S. Experimental measurement and assessment of ice conditions with a fixed-wing unmanned aerial vehicle over Yellow River, China. J. Appl. Remote Sens. 2012, 6. [Google Scholar] [CrossRef]
- Ahmad, A.; Room, M.H.M. Mapping of a river using close range photogrammetry technique and unmanned aerial vehicle system. IOP Conf. Ser. Earth Environ. Sci. 2014, 18, 012061. [Google Scholar] [CrossRef]
- Stephen, N.; Sanjiban, C.; Sezal, J.; Andrew, C.; Luke, Y.; Sebastian, S.; Lyle, C.; Hugh, C.; Sanjiv, S. Autonomous exploration and motion planning for an unmanned aerial vehicle navigating rivers. J. Field Robot. 2015, 32, 1141–1162. [Google Scholar] [CrossRef]
- Tamminga, A.; Hugenholtz, C.; Eaton, B.; Lapointe, M. Hyperspatial remote sensing of channel reach morphology and hydraulic fish habitat using an unmanned aerial vehicle (uav): A first assessment in the context of river research and management. River Res. Appl. 2015, 31, 379–391. [Google Scholar] [CrossRef]
- Woodget, A.S.; Visser, F.; Maddock, I.P.; Carbonneau, P.E. The accuracy and reliability of traditional surface flow type mapping: Is it time for a new method of characterizing physical river habitat? River Res. Appl. 2016, 32, 1902–1914. [Google Scholar] [CrossRef]
- Thumser, P.; Haas, C.; Tuhtan, J.A.; Fuentes-Pérez, J.F.; Toming, G. RAPTOR-UAV: Real-time particle tracking in rivers using an unmanned aerial vehicle. Earth Surf. Proc. Land. 2017, 42. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.R.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Widyatama, A.; Dinaryanto, O.; Indarto; Deendarlianto. The development of image processing technique to study the interfacial behavior of air-water slug two-phase flow in horizontal pipes. Flow Meas. Instrum. 2018, 59, 168–180. [Google Scholar] [CrossRef]
- Movahedi, A.; Kavianpour, M.R.; Yamini, O.A. Evaluation and modeling scouring and sedimentation around downstream of large dams. Environ. Earth Sci. 2018, 77, 320. [Google Scholar] [CrossRef]
- Plenderleith, J.; Bunn, S. Microsoft Visual Studio 2008 Programming; Magraw-Hill Companies, Inc.: New York, NY, USA, 2008. [Google Scholar]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision in C++ with the OpenCV Library; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2013. [Google Scholar]
- Rehman, A.; Saba, T. Neural networks for document image preprocessing: State of the art. Artif. Intell. Rev. 2014, 42, 253–273. [Google Scholar] [CrossRef]
- Privitera, C.M.; Stark, L.W. Algorithms for defining visual regions-of-interest: Comparison with eye fixations. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 970–982. [Google Scholar] [CrossRef]
- Yang, X.; Ling, Y.; Li, S.; Hou, L.; Zhao, G.; Zeng, K. Graying for images with color-discrete characteristic. Optik 2011, 122, 1633–1637. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal Mach. Intell. 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Zheng, J.; Zhang, D.; Huang, K.; Sun, Y. Adaptive image segmentation method based on the fuzzy c-means with spatial information. IET Image Process. 2018, 12, 785–792. [Google Scholar] [CrossRef]
- Zhang, Y.; Bai, X.; Wang, T. Boundary finding based multi-focus image fusion through multi-scale morphological focus-measure. Inform. Fusion 2017, 35, 81–101. [Google Scholar] [CrossRef]
- Andreopoulos, A.; Tsotsos, J.K. 50 years of object recognition: Directions forward. Comput. Vis. Image Undstand. 2013, 117, 827–891. [Google Scholar] [CrossRef]
- Li, B.; Zhou, W.; Sun, J.; Wen, C.Y.; Chen, C.K. Development of model predictive controller for a Tail-Sitter VTOL UAV in hover flight. Sensors 2018, 18, 2859. [Google Scholar] [CrossRef] [PubMed]
- Yuan, H.; Xu, W.; Li, R.; Feng, Y.; Hao, Y. Spatial distribution characteristics of rainfall for two-jet collisions in air. Water 2018, 10, 1600. [Google Scholar] [CrossRef]
- Reitz, R.D.; Bracco, F.V. Mechanism of atomization of a liquid jet. Phys. Fluids 1998, 25, 1730–1742. [Google Scholar] [CrossRef]
- Xu, W.; Liao, H.; Yang, Y.; Wu, C. Turbulent flow and energy dissipation in plunge pool of high arch dam. J. Hydraul. Res. 2002, 40, 471–476. [Google Scholar] [CrossRef]
- Bjerklie, D.M.; Dingman, S.L.; Bolster, C.H. Comparison of constitutive flow resistance equations based on the Manning and Chezy equations applied to natural rivers. Water Resour. Res. 2005, 41, 644–653. [Google Scholar] [CrossRef]
- Ferguson, R. Time to abandon the manning equation? Earth Surf. Proc. Landf. 2010, 35, 1873–1876. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Q (m3/s) | Average Displacement (cm) | Max Displacement (cm) |
|---|---|---|---|
| 1 | 341 | 18.478 | 28.704 |
| 2 | 643 | 22.604 | 63.782 |
| 3 | 1249 | 72.961 | 140.293 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, A.; Wu, S.; Wang, F.; Wu, X.; Xu, P.; Yu, L.; Zhu, S. A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level. Water 2019, 11, 124. https://doi.org/10.3390/w11010124
Gao A, Wu S, Wang F, Wu X, Xu P, Yu L, Zhu S. A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level. Water. 2019; 11(1):124. https://doi.org/10.3390/w11010124
Chicago/Turabian StyleGao, Ang, Shiqiang Wu, Fangfang Wang, Xiufeng Wu, Peng Xu, Lei Yu, and Senlin Zhu. 2019. "A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level" Water 11, no. 1: 124. https://doi.org/10.3390/w11010124
APA StyleGao, A., Wu, S., Wang, F., Wu, X., Xu, P., Yu, L., & Zhu, S. (2019). A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level. Water, 11(1), 124. https://doi.org/10.3390/w11010124