1. Introduction
In recent years, tsunamis have caused catastrophic damage. The great Indian Ocean tsunami in 2004 and the Tohoku-Oki earthquake tsunami in 2011 caused serious human and economic losses, which raised concerns about the importance of tsunami hazard issues. Tsunamis are mostly generated by seismic seafloor deformation, but tsunamis are also triggered by other mechanisms. For example, landslides are other probable sources causing destructive tsunamis. On 9 July 1958, a huge landslide on the banks of Lituya Bay, Alaska, generated a maximum run-up height of 525 m. It is thus important to understand landslide-induced tsunamis.
Landslide tsunamis display different characteristics from that of earthquake tsunamis due to the fact that the wavelength scales of landslide-generated tsunamis are usually much less than that induced by an earthquake. Though, tsunamis are usually described by long wave theory, landslide-induced tsunamis are not best characterized as long waves. The study of landslide-induced waves is quite difficult. In most cases, the sliding bulk is deformable because it is composed of granular materials. The phenomena of wave breaking, turbulence, and fluid-granular interaction are included in the tsunami generated by a landslide. The complexity of landslide tsunamis was shown in the experimental study [
1].
For simplifying the problems and as a first approximation, the sliding bulk is usually treated as a rigid body and the problems are studied by using experimental and numerical methods. Simulation of landslide-induced waves caused by a 2-D elliptic mass motion was carried out [
2] by solving the Laplace equation with the boundary element method (BEM, or some may say the boundary integral equation method, BIEM). The 2-D model was extended latterly to 3-D [
3]. Experiments about waves induced by 2-D landslides were carried out [
4] while one could also find analogous 3-D experiments. [
5,
6].
Apart from using BEM models, landslide tsunamis could also be simulated by using Boussinesq-type models [
7,
8,
9,
10]. Due to simplifying 3-D free surface flow problems to 2-D horizontal wave problems, Boussinesq-type models are more efficient than BEM models. However, it was reported that the Boussinesq-type numerical model is incapable of simulating problems with large slopes [
9]. Because boundaries in this problem are deformable, a meshless method might be applicable, in both the aspect of efficiency and capability. A meshless numerical model was developed for the simulation of water waves induced by 2-D landslides [
11]. The flow was treated as potential. By adopting the time marching process proposed by Wu and Chang [
12], the time dependent problem was transformed to a series of time independent boundary value problems (BVP). At each time step, the BVP was solved by a meshless method which used collocation with radial basis functions (RBF). A very effective treatment for the landslide boundary was also proposed. However, the efficiency was not improved so much, because in RBF collocation methods the matrix formed for solving the solution is full. This gave us the incentive to try other meshless methods.
Meshless methods treating fluid as separate particles [
13,
14,
15,
16,
17,
18] are powerful tools for simulating the large deformation of free surfaces. Wave breaking can also be simulated. However, these methods might not be suitable for the problem focused in the present study. This is because the solid boundary conditions are implemented by placing several layers of so called ghost particles outside the computational domain and these ghost particles are mostly fixed.
For solving general partial differential equations (PDE), a robust meshless method which uses local polynomial collocation with the weighted least squares (WLS) approach was proposed [
19]. It originated from the Finite Point Method (FPM) [
20,
21]. It is a localized meshless method thus the matrix formed in the collocation process is sparse. Therefore, this method is more efficient than the RBF-collocation method. The method was developed in a way that the governing equation as well as the boundary conditions could be satisfied on boundaries. It is therefore more robust than conventional collocation methods. Adopting this meshless method and the time marching process, the 2-D free surface potential flows in a swaying tank were simulated [
22]. An analogous work was carried out to study the solitary wave generation by a piston type wave maker [
23]. The 2-D sloshing model was extended to 3-D [
24]. Free surface waves in the liquid sloshing of rectangular, square, and cylindrical tanks were simulated.
In this study, we modified the 3-D sloshing model in Wu et al. [
24] by applying the moving landslide boundary treatment proposed by in Huang et al. [
11] to develop a numerical model that can simulate tsunamis generated by 3-D submerged landslides. The model established in this study was validated by comparing the results with experimental data in and other numerical results in. Then we extended the width of the wave tank to observe the edge waves on the shore.
2. Mathematical Description of the Free-Surface Wave Problem
For inviscid incompressible fluids, the flow velocity
can be expressed as the gradient of the velocity potential
due to the irrotationality.
in which
is the gradient operator. The flow is governed by the Laplace equation.
where
is named as the Laplace operator. For free surface flows in the gravity field, two boundary conditions are to be satisfied on the free surface. They are
in which
is the gravity acceleration. These two equations are the kinematic and dynamic boundary conditions respectively. Both of them have been transformed onto the Lagrangian aspect. At a fluid-solid interface, the no-flux boundary condition has to be satisfied. That is
where
is the unit normal vector outward from the domain and
is the velocity of the moving solid boundary.
For solving this kind of time-dependent problems, the time domain firstly has to be discretized. At each time step, the Laplace equation needs to be solved once to obtain the velocity potential in the entire domain thus to further determine the velocity. Boundary positions are updated by the given motion of the solid boundaries and the prediction from the time marching process of the free-surface boundary. The first-order forward difference and second-order central difference to Equation (4) is employed.
where
denotes the position of the
j-th node and this equation is only valid in case the node is on the free surface. In this formulation, the required data on the right-hand side are already known. What one needs to do first is to determine the position of each traced ‘particle’,
. When the velocity potential in the entire domain is obtained, the velocity at each of the nodes whether inside the domain or on the boundaries can be estimated accurately. Therefore, by the first-order and second-order finite difference scheme in the time domain, one can obtain the following formula from Equation (3).
Here it should be noted that this equation is valid for all the nodes, not just for free surface nodes. For better numerical stability, the Crank-Nicolson formula should then be applied.
Note that there is no need to solve the Laplace equation again because there is almost no difference between the free-surface velocity potential at whether it is predicted by using Equation (7) or corrected by using Equation (8). Following are the procedures of the time marching process.
Use Equation (7) to predict the positions of all the nodes.
Use Equation (6) to predict the value of for each free surface node.
Solve the Laplace Equation and obtain and in the entire domain.
Correct the positions of all the nodes by using Equation (8).
Process the next time step by repeating the above four steps.
Since the present model is a meshless one, there is no need to do any re-meshing after the positions of the particles are changed.
3. Method for Solving the Governing Equation
At each time step, the Laplace equation needs to be numerically solved once. One could choose any numerical method to do this, either grid-based or mesh-free. In this study the local polynomial collocation method proposed by Wu and Tsay [
19] is chosen because we need accurate partial derivatives of the velocity potential on the free surface. This method was developed for solving general 2-D partial differential equations and was extended to 3-D. Here we give a brief description of this method.
Consider the general 3-D linear second order PDE as
subjected to the boundary conditions
where
and
are both linear operators,
denotes the domain,
denotes the boundary, and
,
, …,
,
,
, …,
,
f, and
S, are all given. They could be either functions of
,
, and
or just constants. When
is not zero but
, …,
are all zero, the boundary condition is Dirichlet type; on the contrary, it is Neumann type. If
, …,
are all non-zero, the boundary is Robin type. One should keep in mind that the boundary condition expressed in Equation (10) is just a general form for conciseness. The boundary
could be composed of several patches and at each connection of two or maybe three patches
,
, …,
, and
f could be multi-valued. Here we introduce an integer
, which indicates the number of boundary conditions to be satisfied at a specific node. In case of
, only the governing equation has to be satisfied. That means obviously that
is inside the domain. If
, it obviously indicates that
rests on an edge or at a corner.
In seeking numerical solutions, the entire domain is distributed with
nodes as needed. At each specific node
,
is approximated as
in which
is the relative position vector,
is the
i-th monomial of the polynomial, and
is a set of coefficients to be determined. The subscript
indicates that this approximation is valid only in the vicinity of
. Once a new
is chosen, there will be a new set of
. For a 3-D problem, the monomials are
where
. The value of
is related to the chosen degree of the polynomial. The third degree polynomial was recommended [
24]. Therefore, in this study,
is chosen as 20. Here we define the error residual of the local approximation around
as
in which
is a weighting factor determined by a radial basis function (RBF) whose value depends on the distance between
and
. The farther
is away from
, the smaller its value will be. There are many ways to determine the value of the weighting factor. In this study, we follow literatures [
19,
20,
21,
22,
23,
24] and use the normalized Gaussian function
where
is the distance between
and
(i.e.,
),
is the shape parameter, and
is the supporting range measured from the point of
. One can find other choices for determining the weighting factor [
15,
16,
17,
18]. Though
is determined by a radial basis function, it is treated just as a “factor” in the process of seeking the partial derivatives of
. This is so called the Weighted Least Square (WLS) approach. The Weighted Least Square is basically the same as Moving Least Square (MLS) when performing the local approximation. However, when seeking the spatial derivatives, they are different. One can find the detailed explanation on the difference between WLS and MLS in the original papers of the FPM [
20,
21]. Considering only the non-zero terms, Equation (13) can be rewritten as
where
is the local index of
in the
j-th sub-domain and
is number of nodes inside the sub-domain, or say the local domain. The use of the WLS approach is to make local approximations of the solution and its partial derivatives closer to the relevant exact values around the focused point than those by just using the least-squares or other approximating approaches.
By making the satisfaction of all the boundary conditions that might exist, the satisfaction of the governing equation is guaranteed when the sum of the following terms approaches to zero
For seeking the best set of
, one can form an equation of
matrix system
in which
where
,
,
,
, and
is the set of coefficients defined in Equation (11). The symbol
represents a penalty weighting factor whose value is much greater than 1. The extremely large weighting can make the error residuals in the governing equation and boundary conditions much smaller. Therefore, the satisfaction of these constraints is achieved. The subscript
reminds us this is valid only in the vicinity of
. Once a new
is chosen, there will be a new
, a new
, a new
, a new
, and a new set of
.
There is no exact solution for Equation (17). One can only determine its least square error approximation by
where
The result of the least square error approximation depends on the settings of
and
. The satisfaction of all the boundary conditions that might exist and the satisfaction of the governing equation are guaranteed when
is set to be extremely large. By employing the WLS approach, local approximations of the solution and its partial derivatives will be very close to the relevant exact values. Similar to finite difference methods, the approximations are deemed as the exact values in the collocation process. Therefore, the local approximations can be assembled to form a global matrix system
in which
The entities are
where
and
are the first entries in the
k-th and
columns in
. It is worth noting again that the symbol
in is the local index of
in the
sub-domain and once a new
is chosen, there will be a new
, a new
and a new
. The approximated partial derivatives of the solution, which are related to the coefficients of the local polynomial approximation, can then be determined by
In this method,
,
, and
are parameters to be given arbitrarily. Appropriate selection of these parameters leads to accurate numerical results. It was reported that parameters
and
are insensitive in the ranges of
and
[
24]. In this study, we choose
and
. As for the supporting range,
, we set it primarily as five times the local spacing of the node. Here the local spacing is defined as the average distance from
to its four nearest neighboring nodes. However, if
chosen in this way is too large or too small so that more than 200 nodes or less than 120 nodes are enclosed in the sub-domain, one should reselect
by using the number of neighboring nodes as the threshold. Therefore,
is different for various points.
It is worth noting again here that, around a specific node , the local approximation is valid only in its vicinity. Once a new is focused, there will be a new , a new , a new , a new set of local matrix, and a new set of .
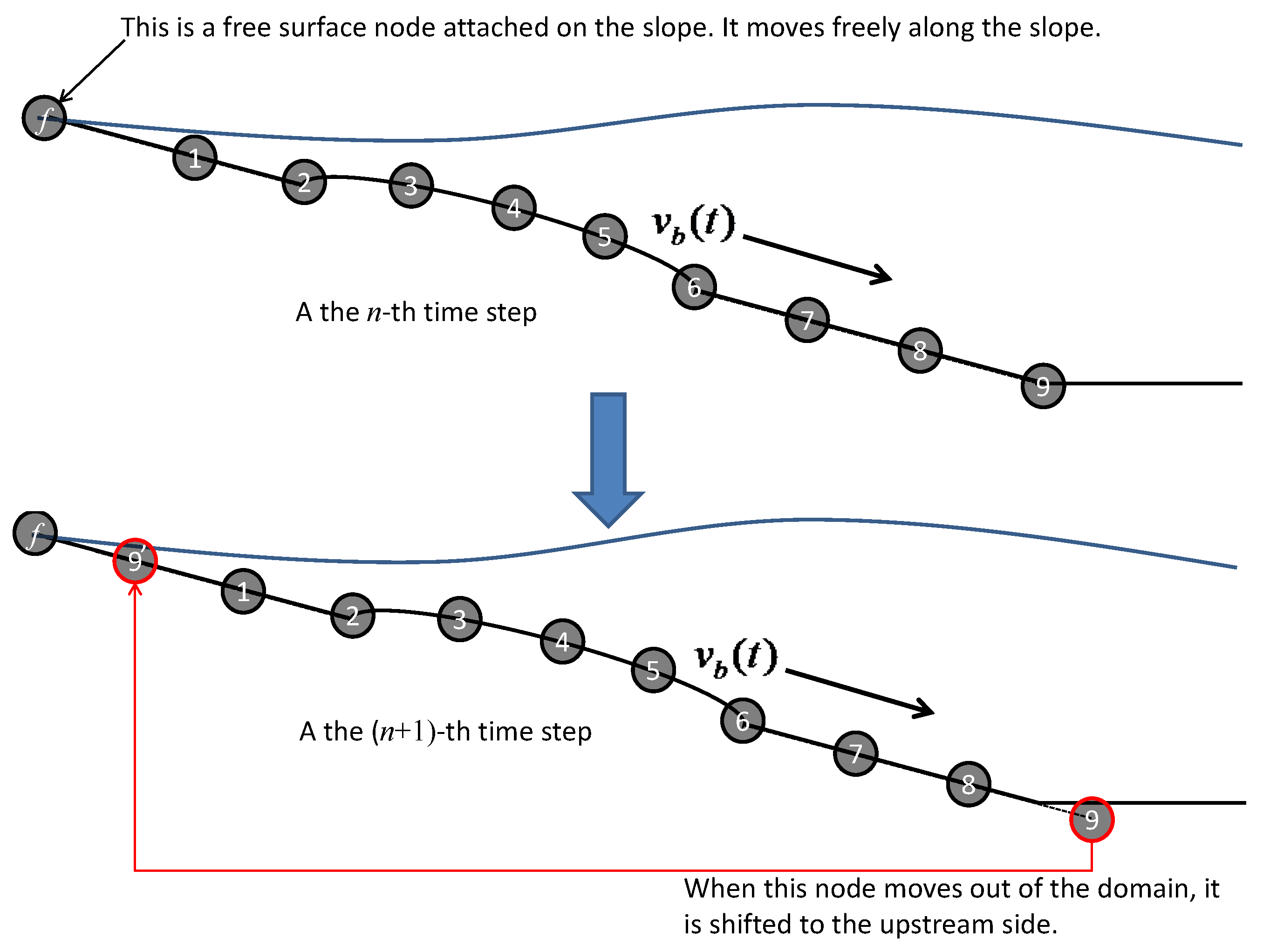
As for the application of this method in the present study, there are seven types of nodes. Nodes of the first type are inside the domain. For these nodes, the number is 0. Nodes of the second type are on the free surface. The number is 1 while the Dirichlet condition is specified. Therefore, in Equation (10) is 1, are 0, and is given by the predicted velocity potential at the free surface. Nodes of the third type are on one of the solid walls. The number for these nodes is also 1. The Neumann condition is employed so in Equation (10) is 0. However, the values of depend on the components of the unit normal vector on the boundary while is given by the movement of the boundary. Nodes of the fourth type are free surface nodes attached to one of the solid walls/slopes. Therefore, the number is 2. Besides the Dirichlet condition specified as nodes of the second type, a Neumann condition is also applied. Nodes of the fifth type are at the edges so two Neumann conditions have to be satisfied. Nodes of the sixth type are free surface nodes at edges while nodes of the seventh type are at the corners beneath the free surface. The numbers of for the fifth, sixth, and seventh types are 2, 3, and 3, respectively. One can employ the boundary conditions in Equations (19) and (22) according to how many conditions should be satisfied.
6. Edge Waves
It was mentioned that tsunamis caused by submerged landslides could have a second run-up which might exceed the first one [
9]. It is very interesting that the second run-up exceeds the first one at a position other than the position of the landslide. To study this, we simulated the three cases with a 13.52 m wide wave flume, which is 10 times the width of the submerged sliding body and 3.654 times of the flume width in the experiment [
6]. In case the sliding body touches the flat bottom, the sliding stops. The simulation is in the time interval of 0–3.9 s.
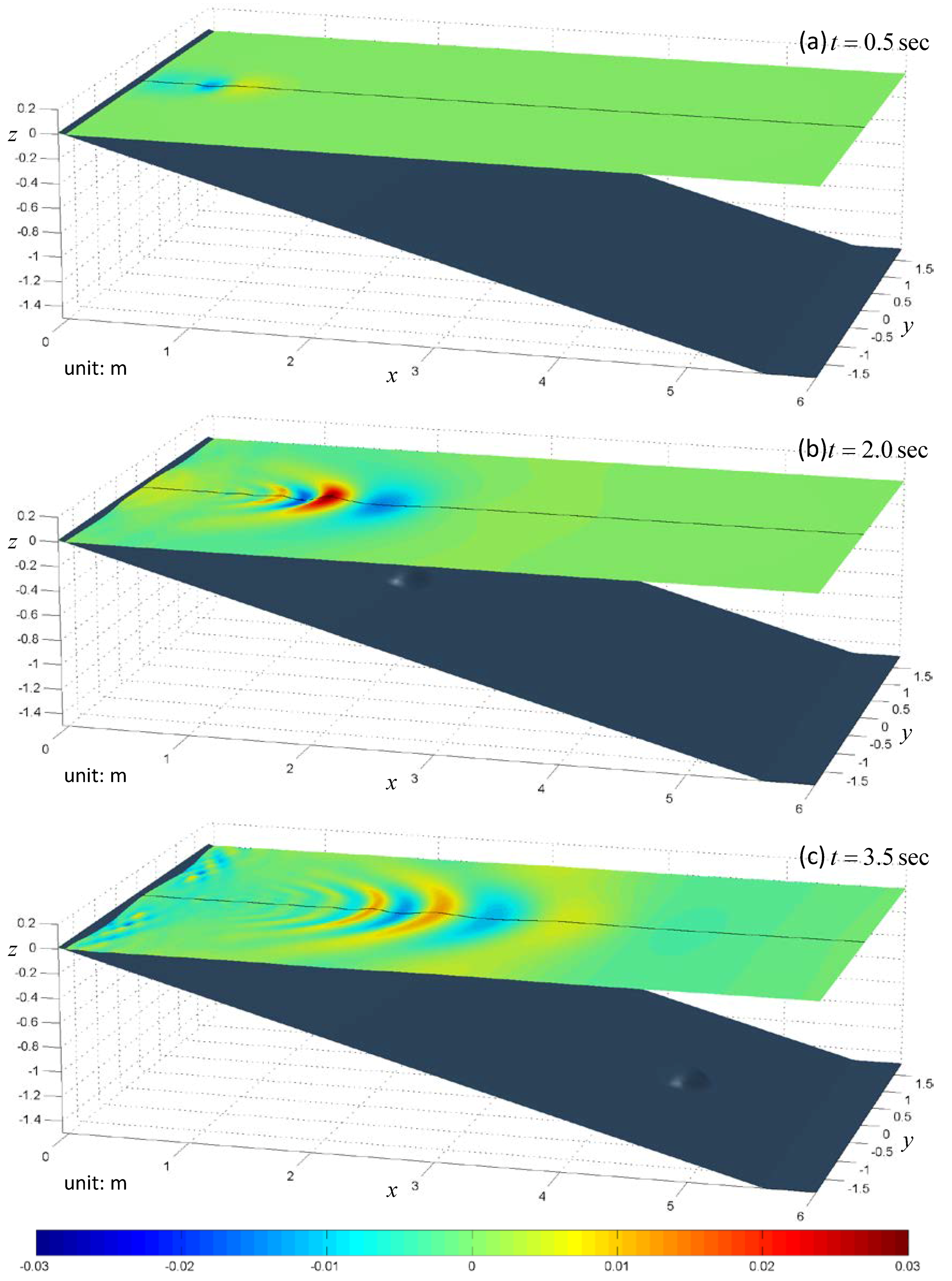
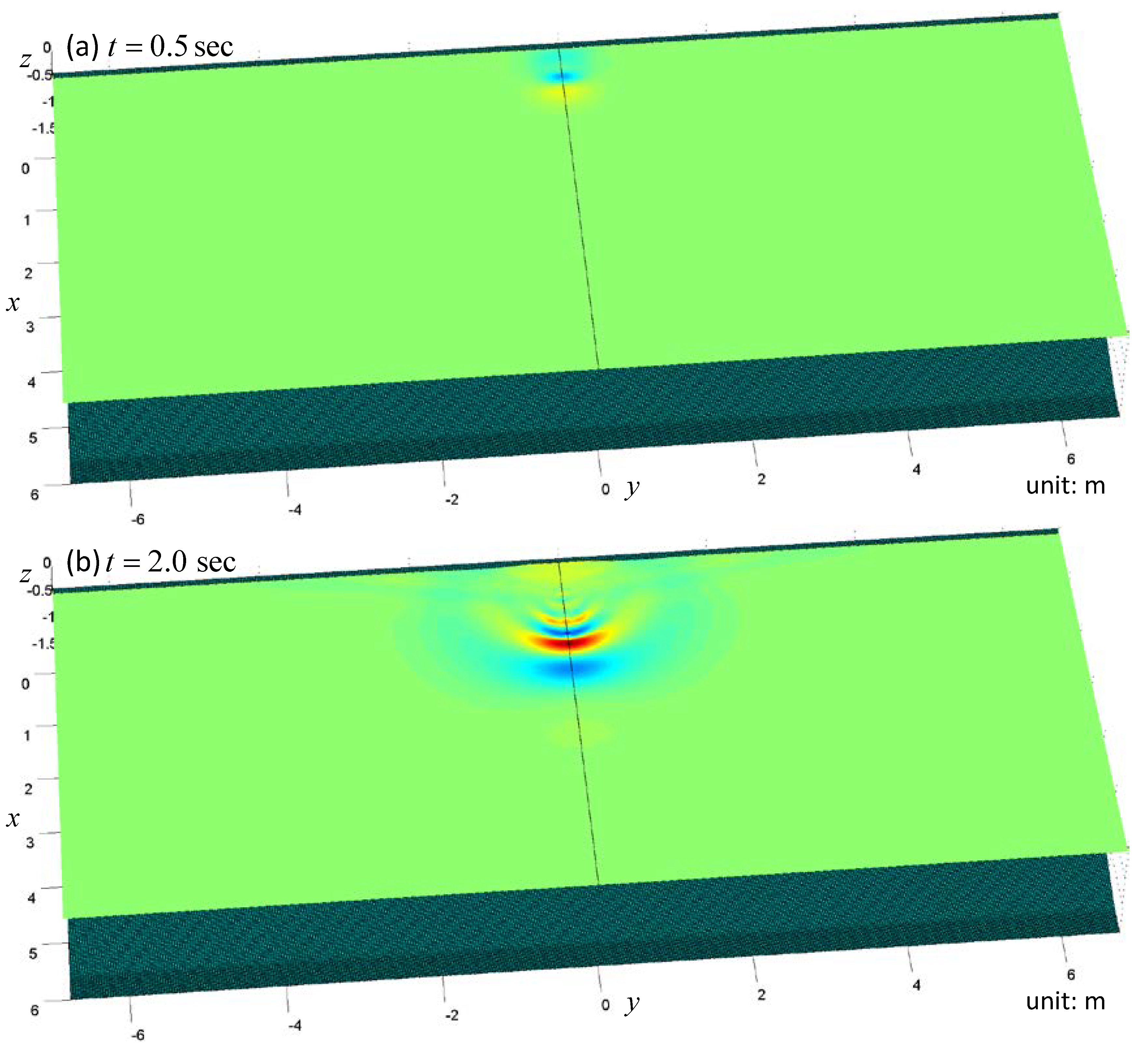
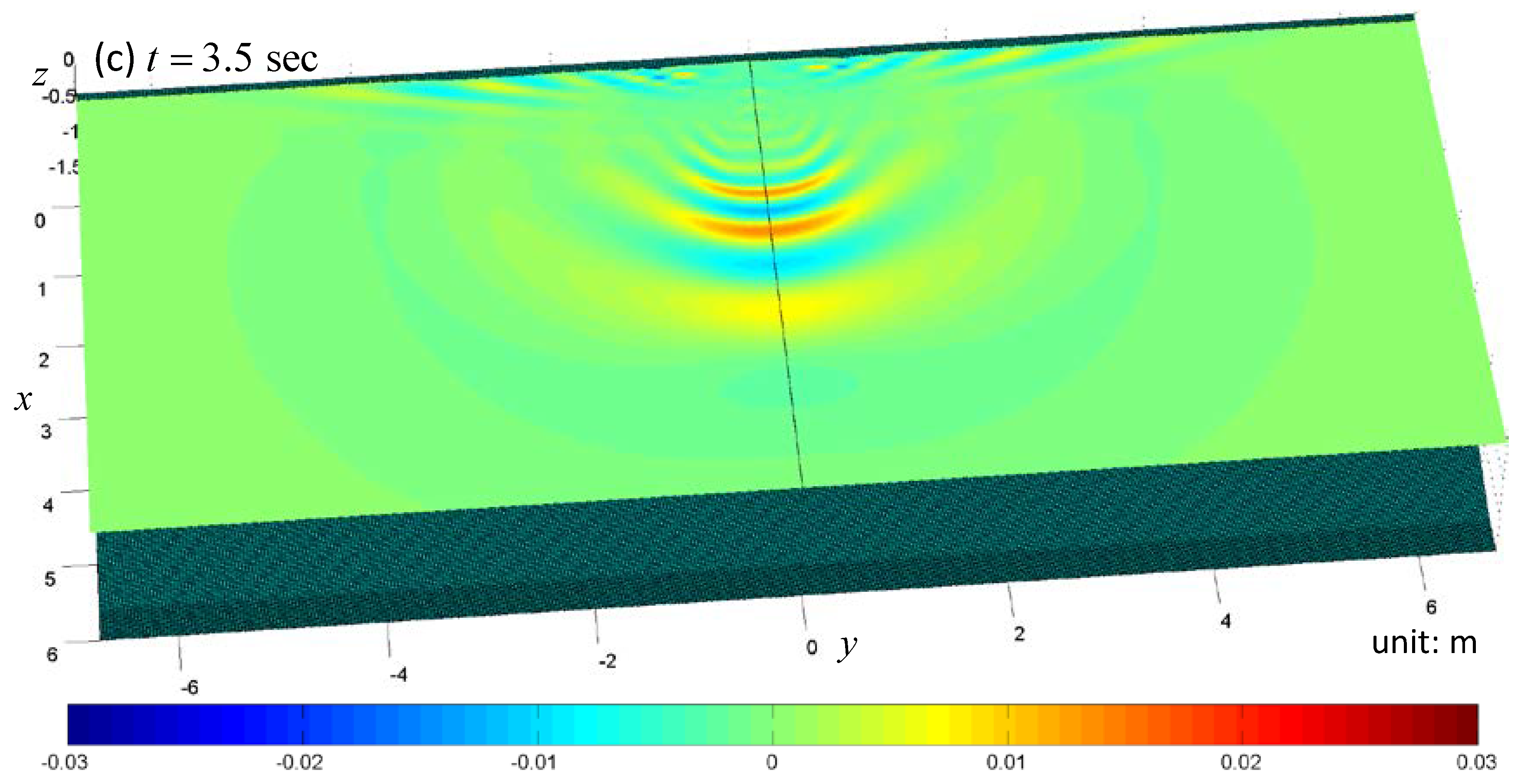
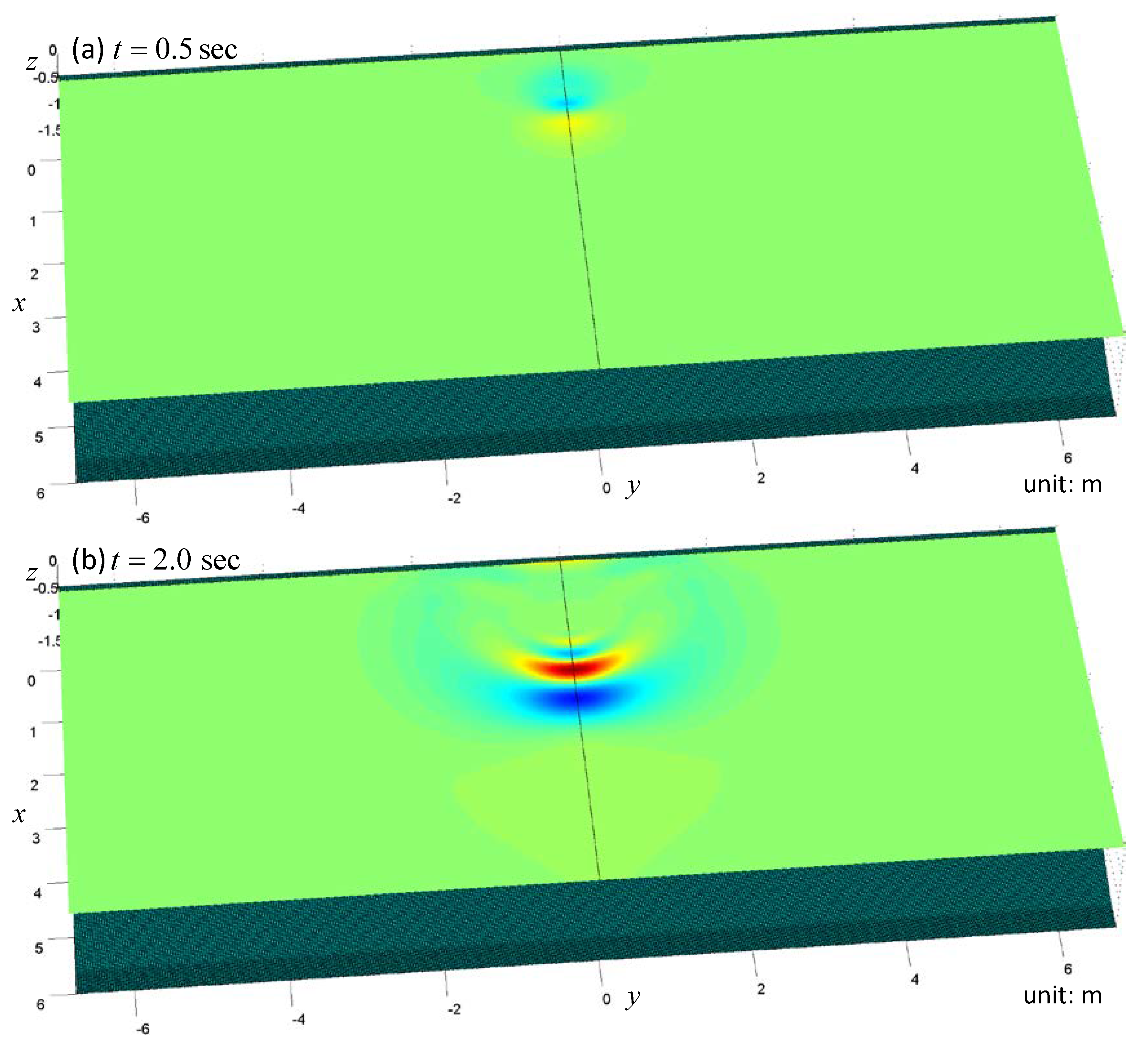
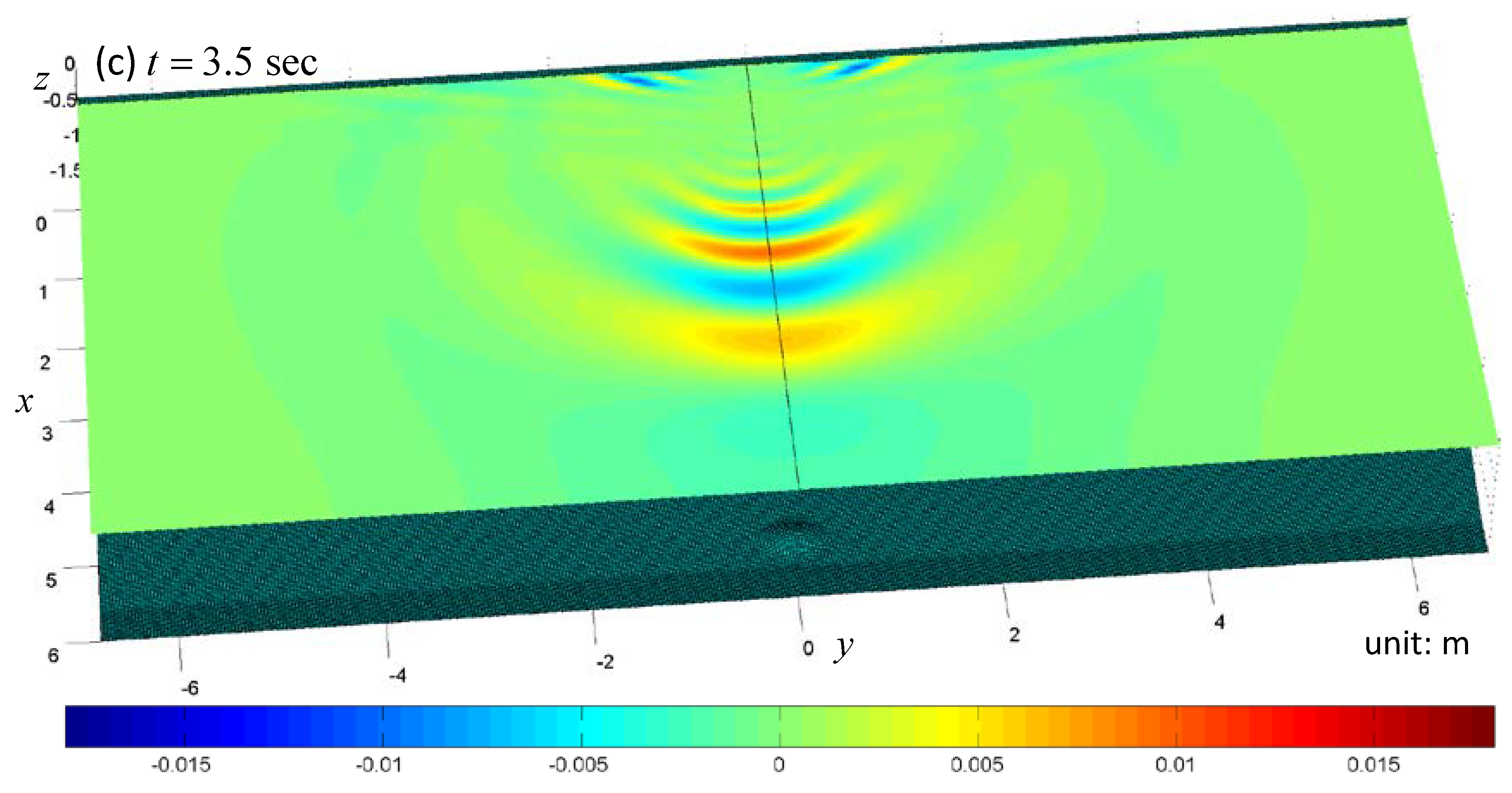
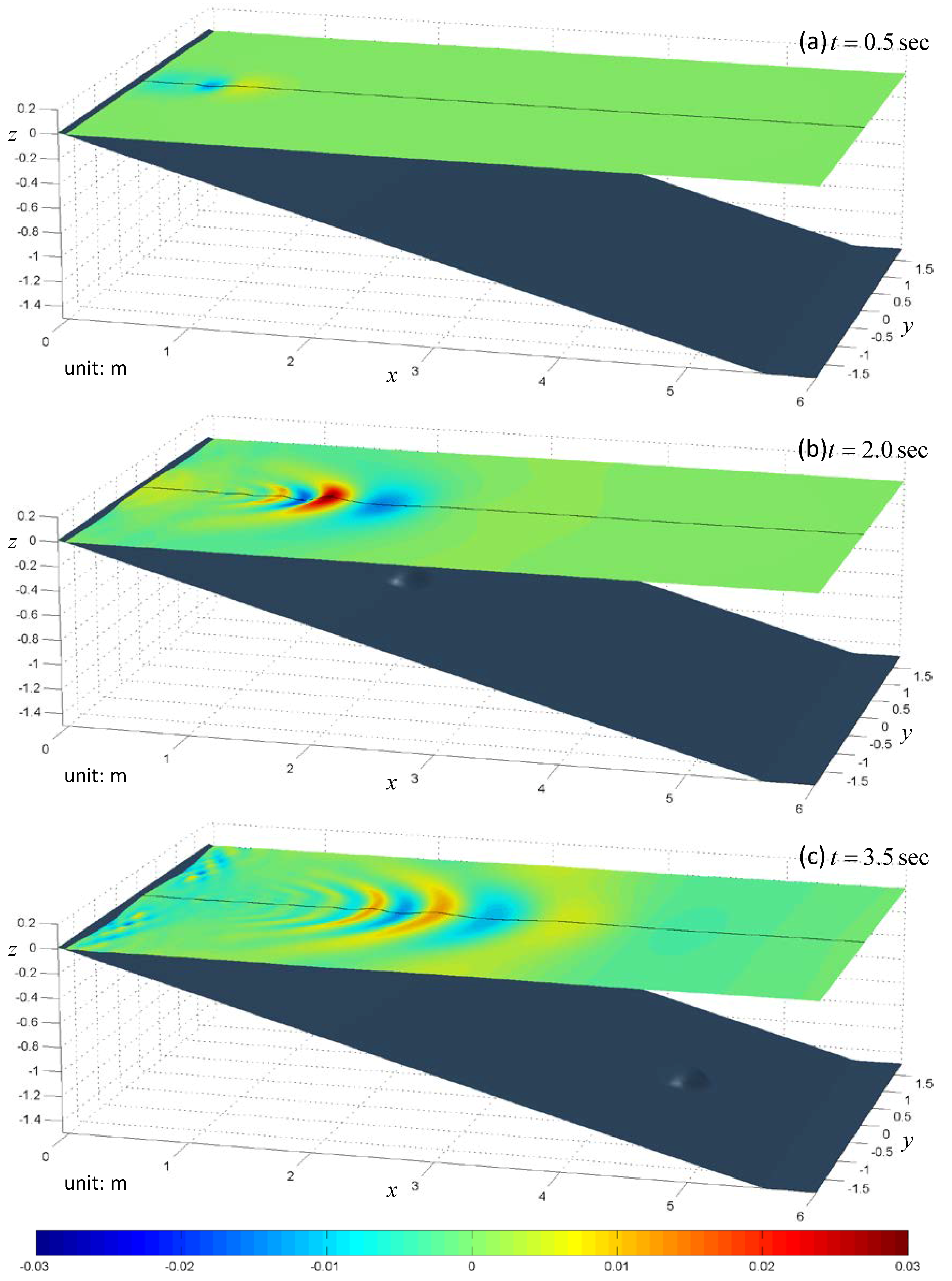
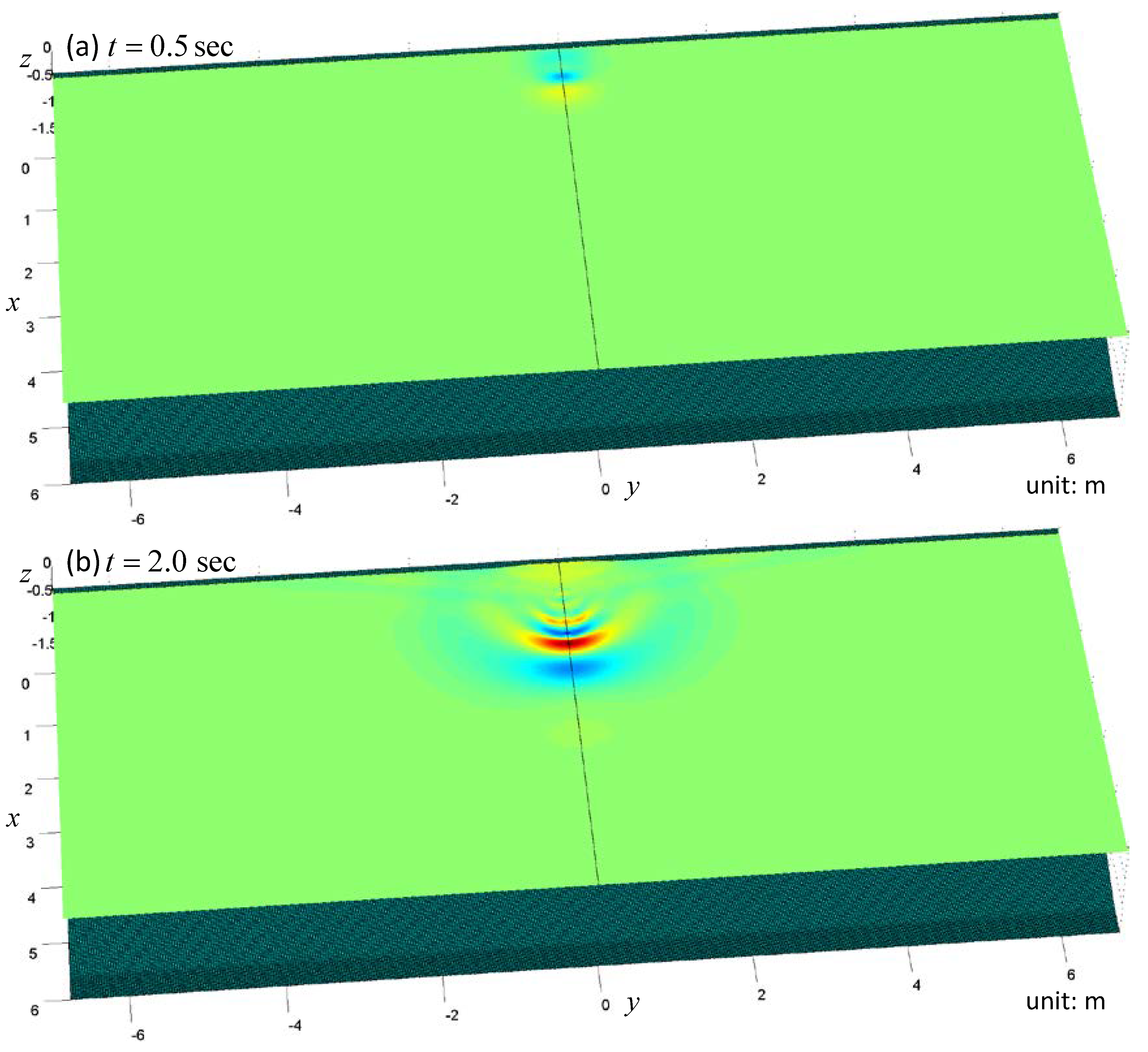
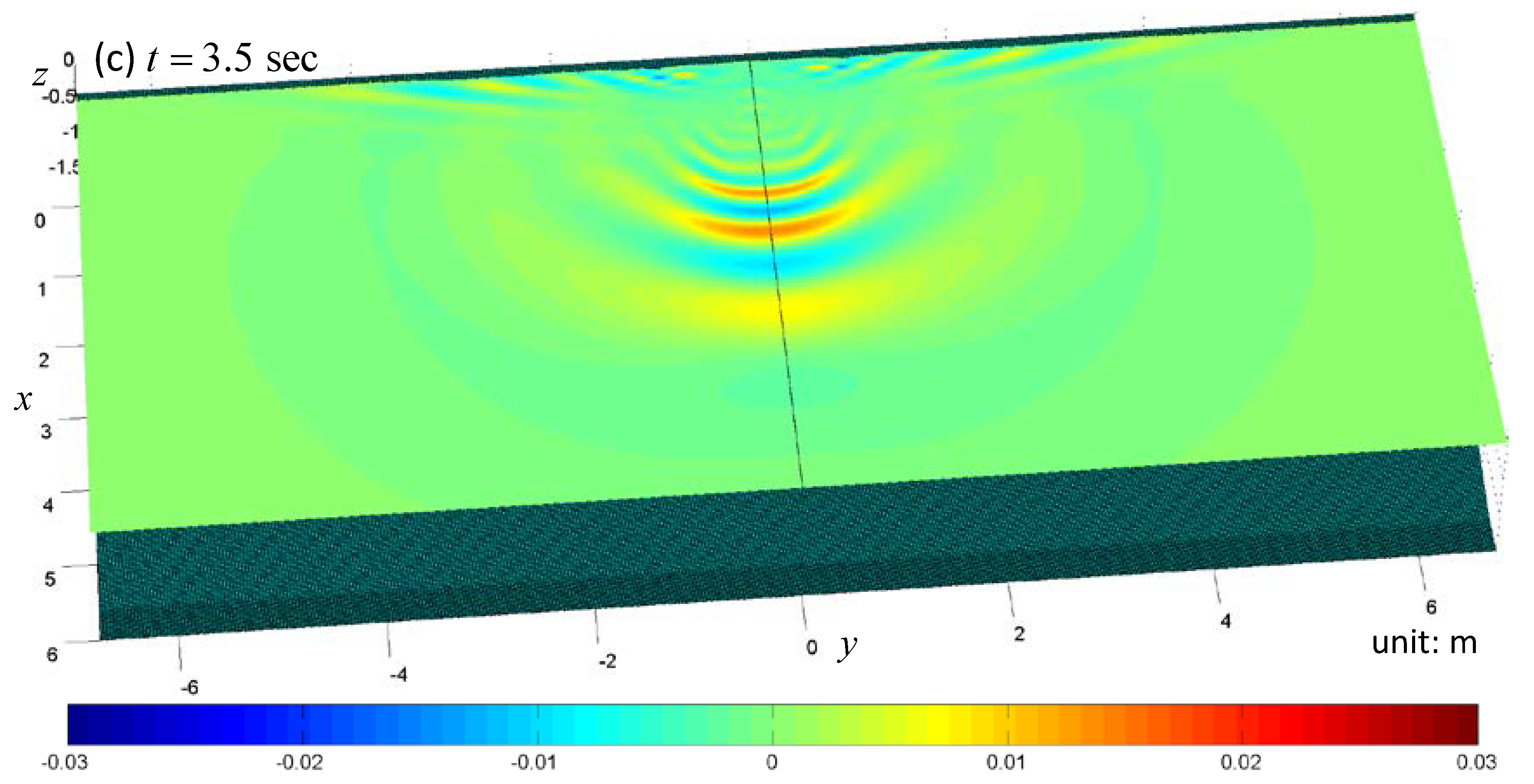
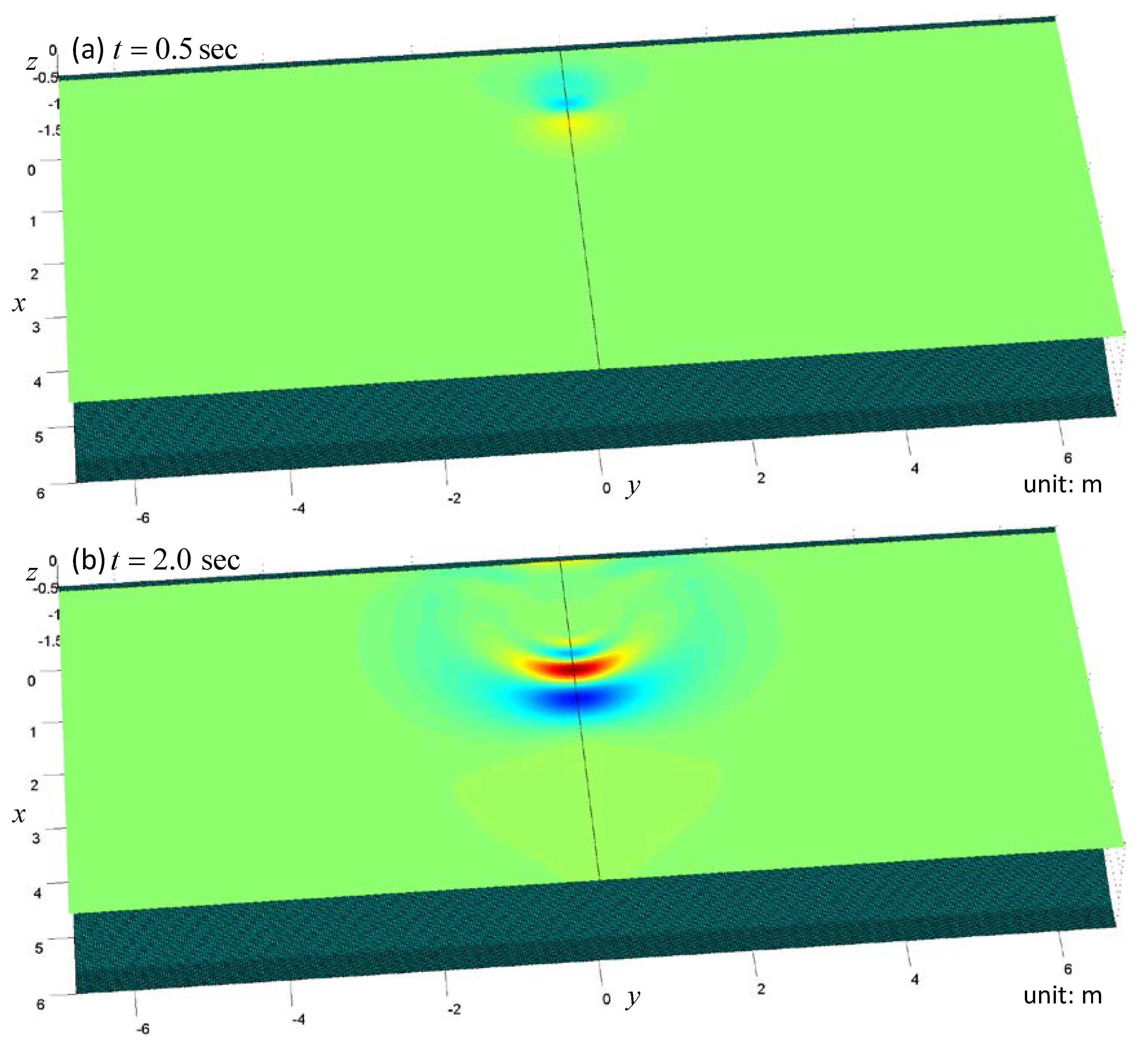
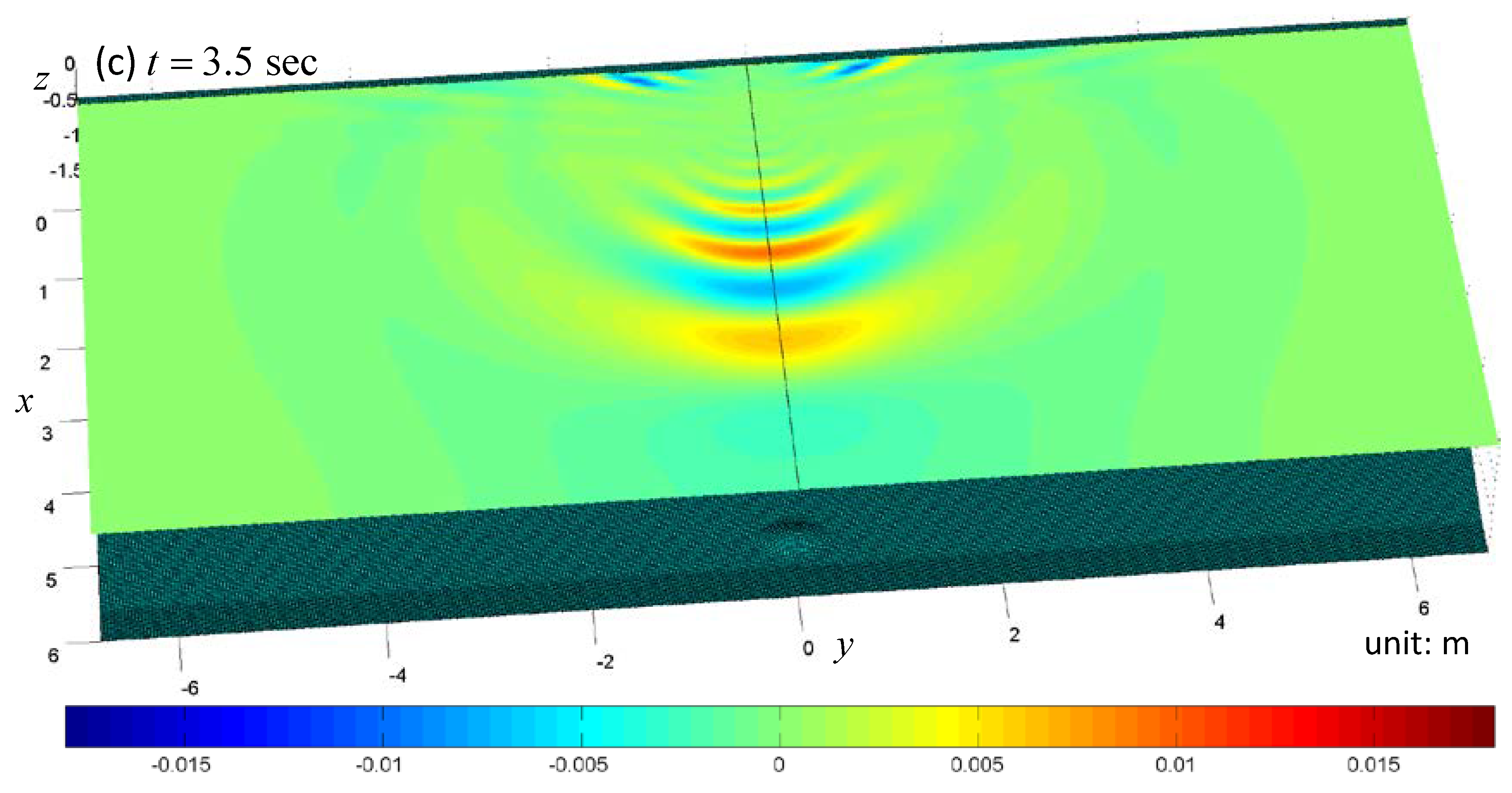
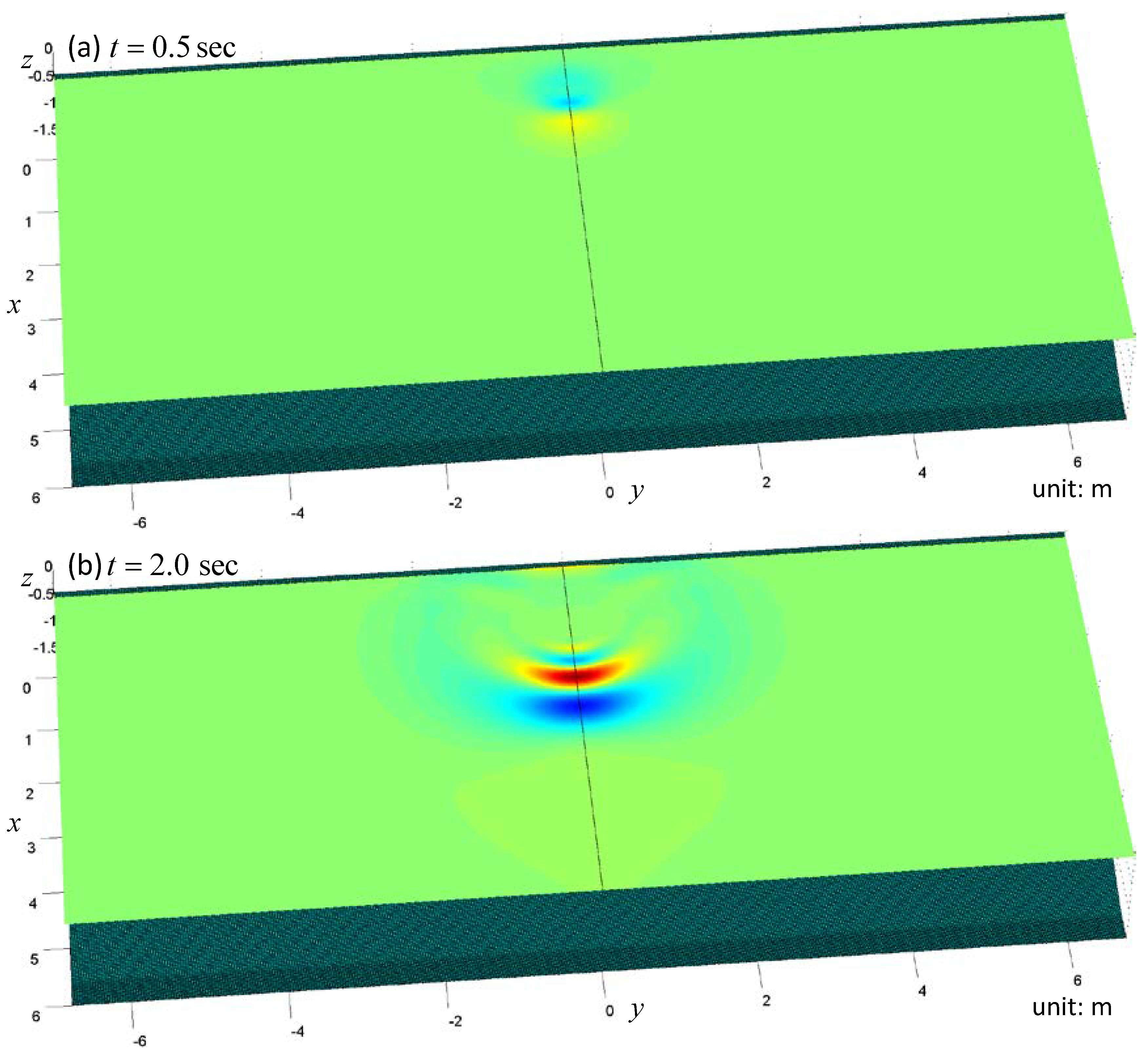
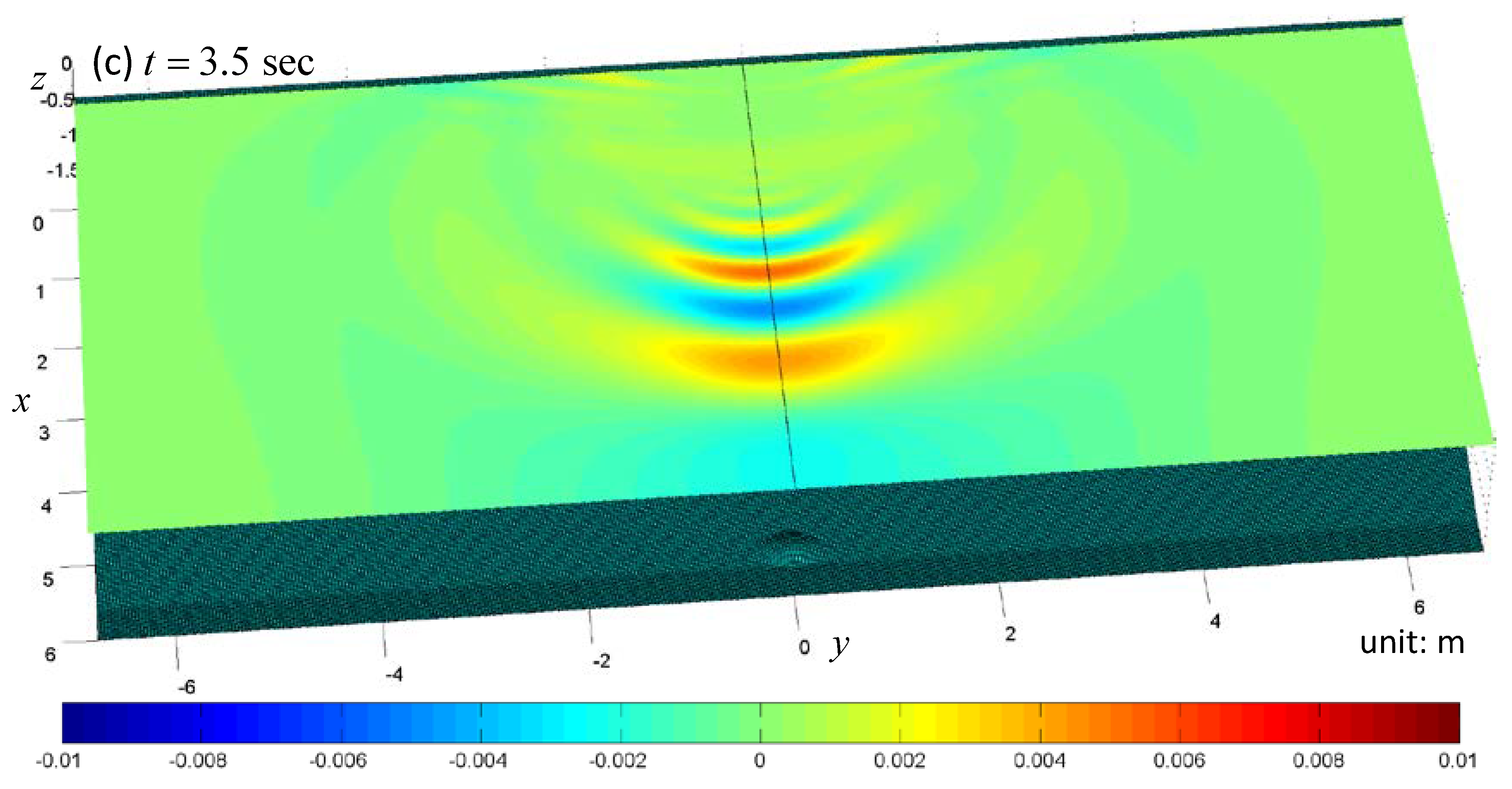
The snapshots of the free surface are shown in
Figure 13,
Figure 14 and
Figure 15. Only the region of
is shown. In the first panel of
Figure 13, one can see the N-wave near the shore. In the second panel of this same figure, one can see the water front running up to the shore. In the last panel, two groups of waves can be found. The first group of waves propagates toward the deep region while the other group propagates along the shore. The same trend of wave propagation can also be found in
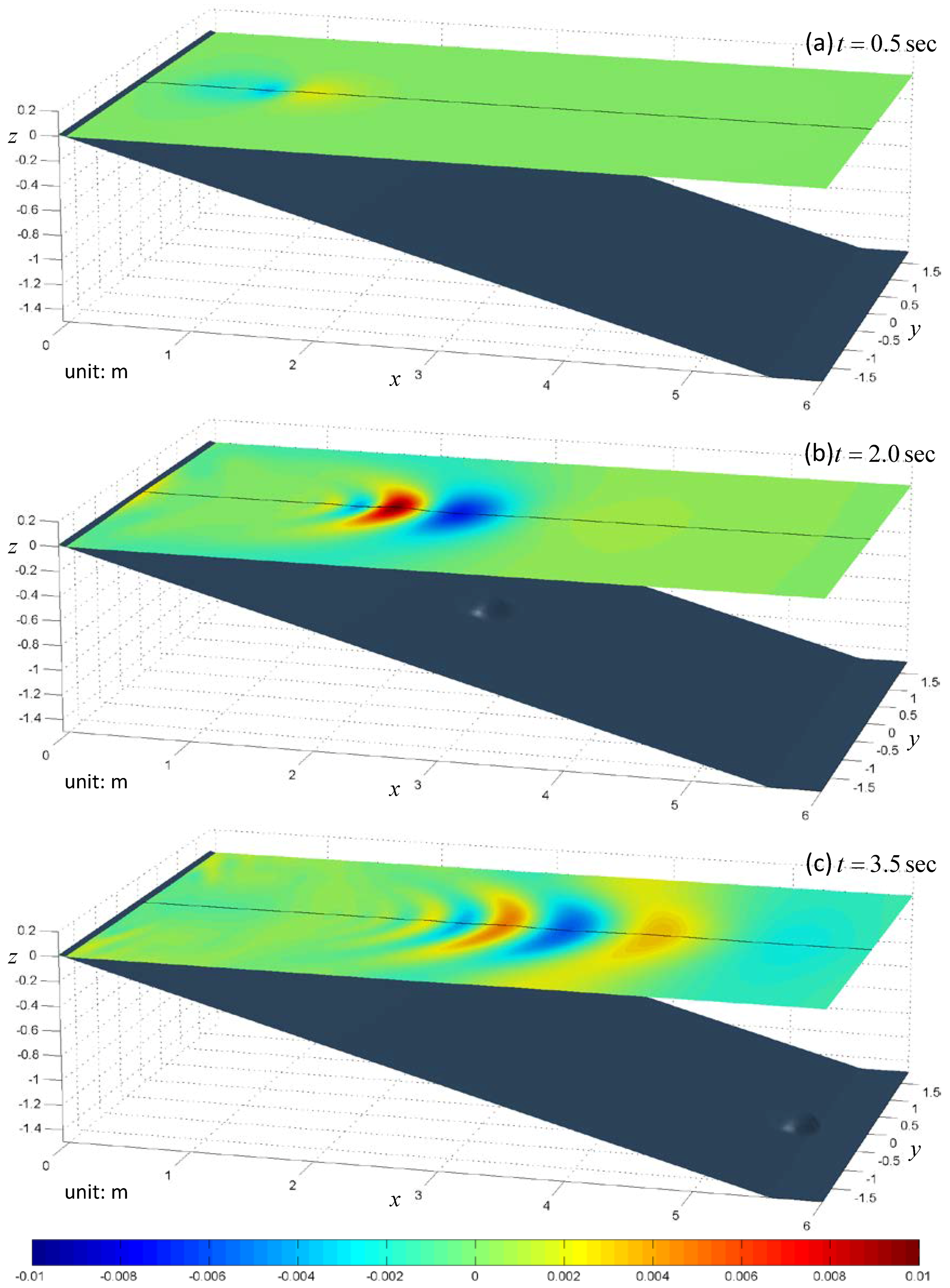
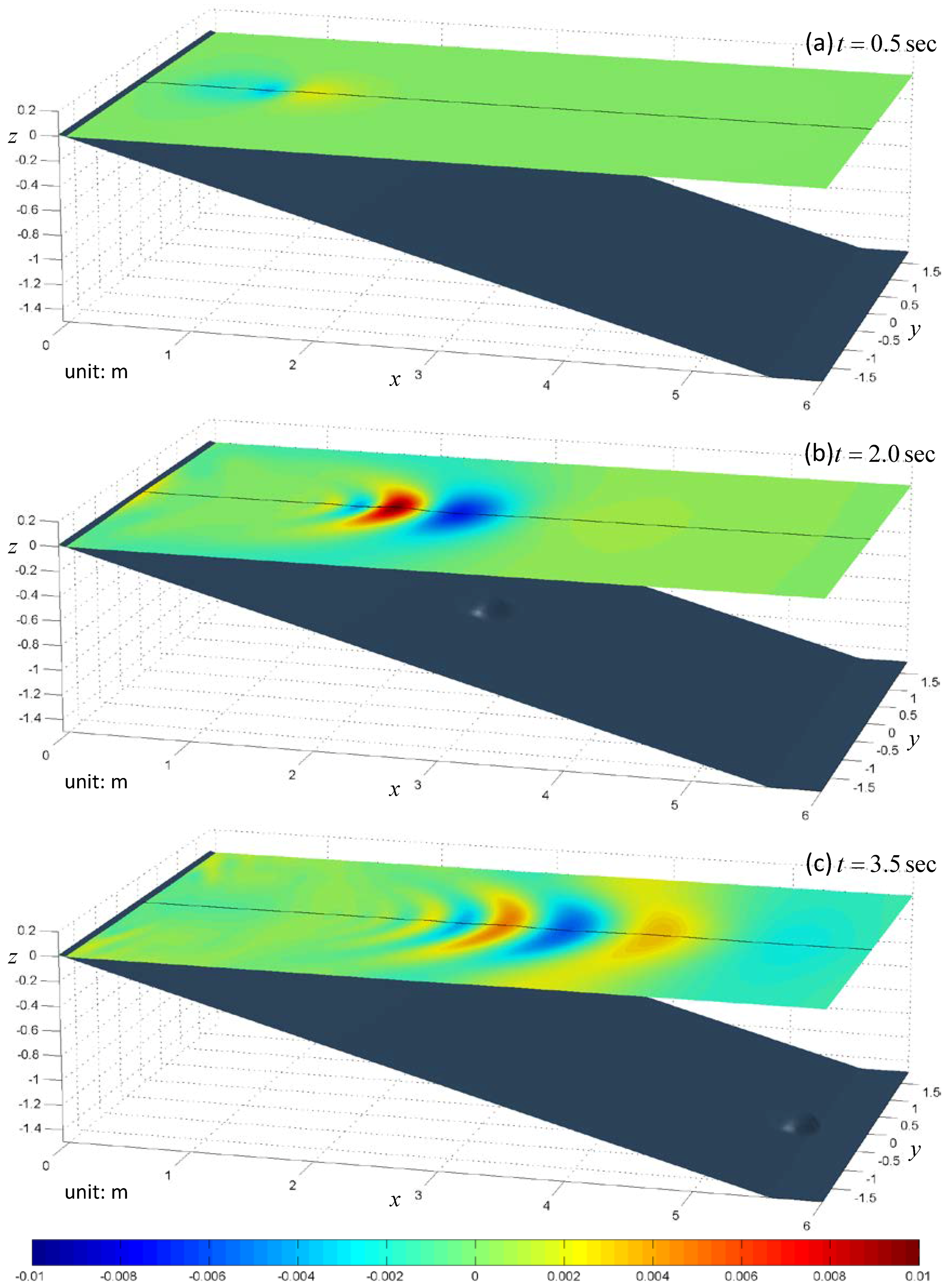
Figure 6. However, since the flume is widened, the edge waves are more perspicuous. The free surface patterns in
Figure 14 and
Figure 15 are also similar to those in
Figure 7 and
Figure 8. Because the initial position of the submerged sliding body is not so close to the shore, the edge waves in case 2 and case 3 are not so obvious as in case 1.
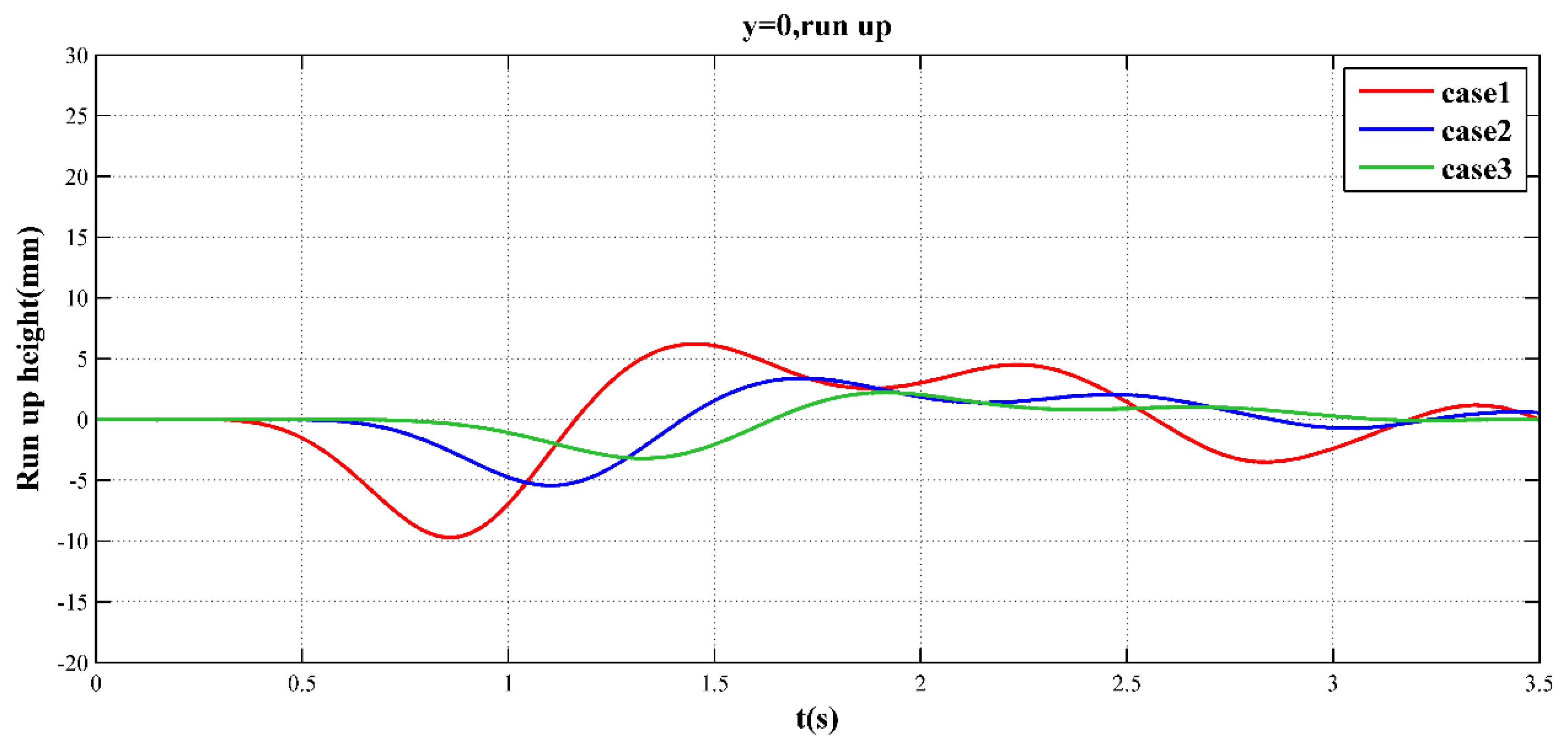
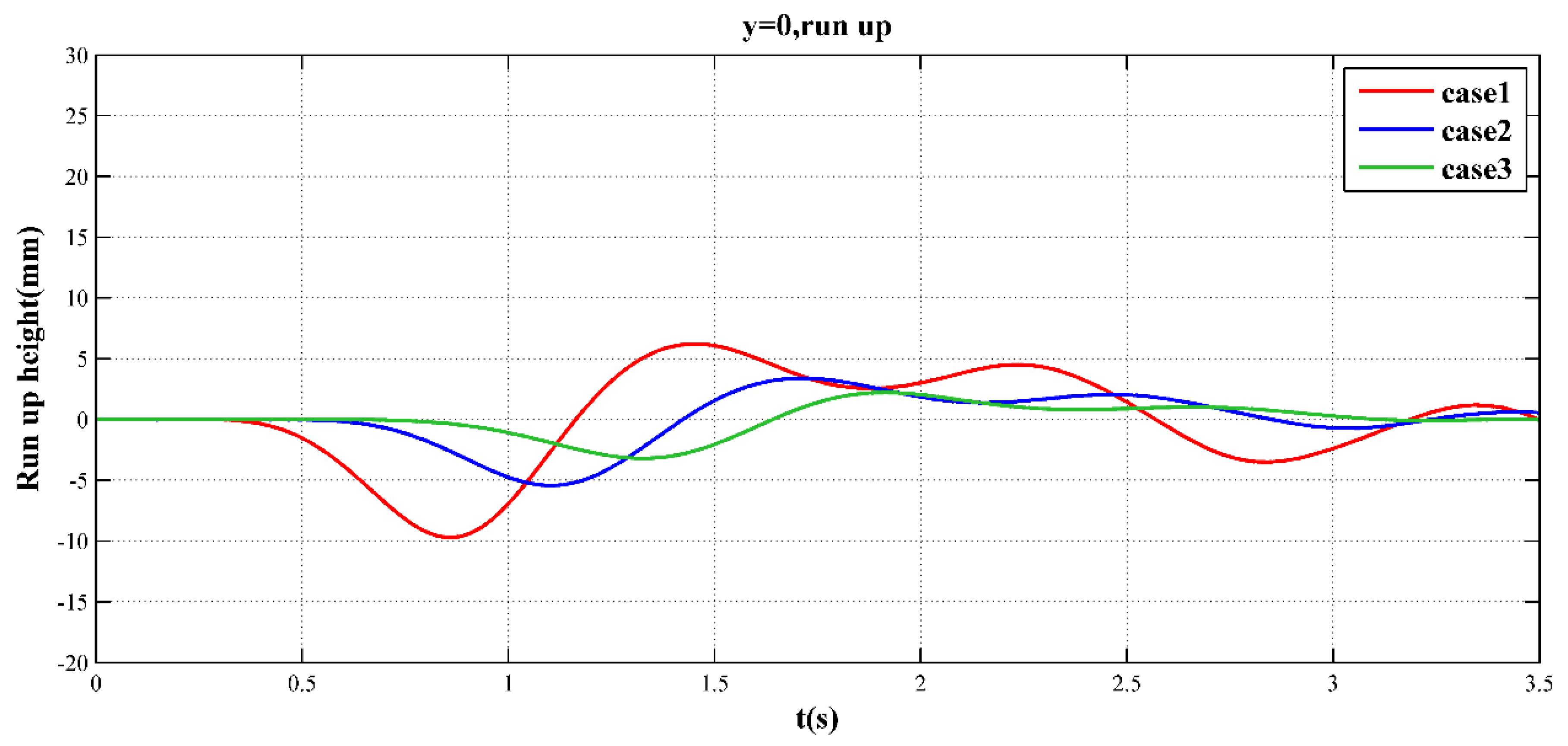
To make a further investigation on the run-up heights, we plotted the time series of the run-up heights along the shore line as shown in
Figure 16. In the first panel of this figure, one can see that the run-down comes first at the symmetric point. After that, the land near the shore around
is inundated for a while, within which there are two peaks of the run-up. After the flood fades away, the movement of the shore around
is relatively calm compared with the other regions. This can also be found in the second and third panels of
Figure 13. At
t = 3.9 s, a run-up greater than that at
y = 0 occurs. The position of this greater run-up is
y = ±0.8 m. The patterns of the other two cases are similar. Due to the differences of initial position and velocities, the values are not the same and the greater run-up heights other than at
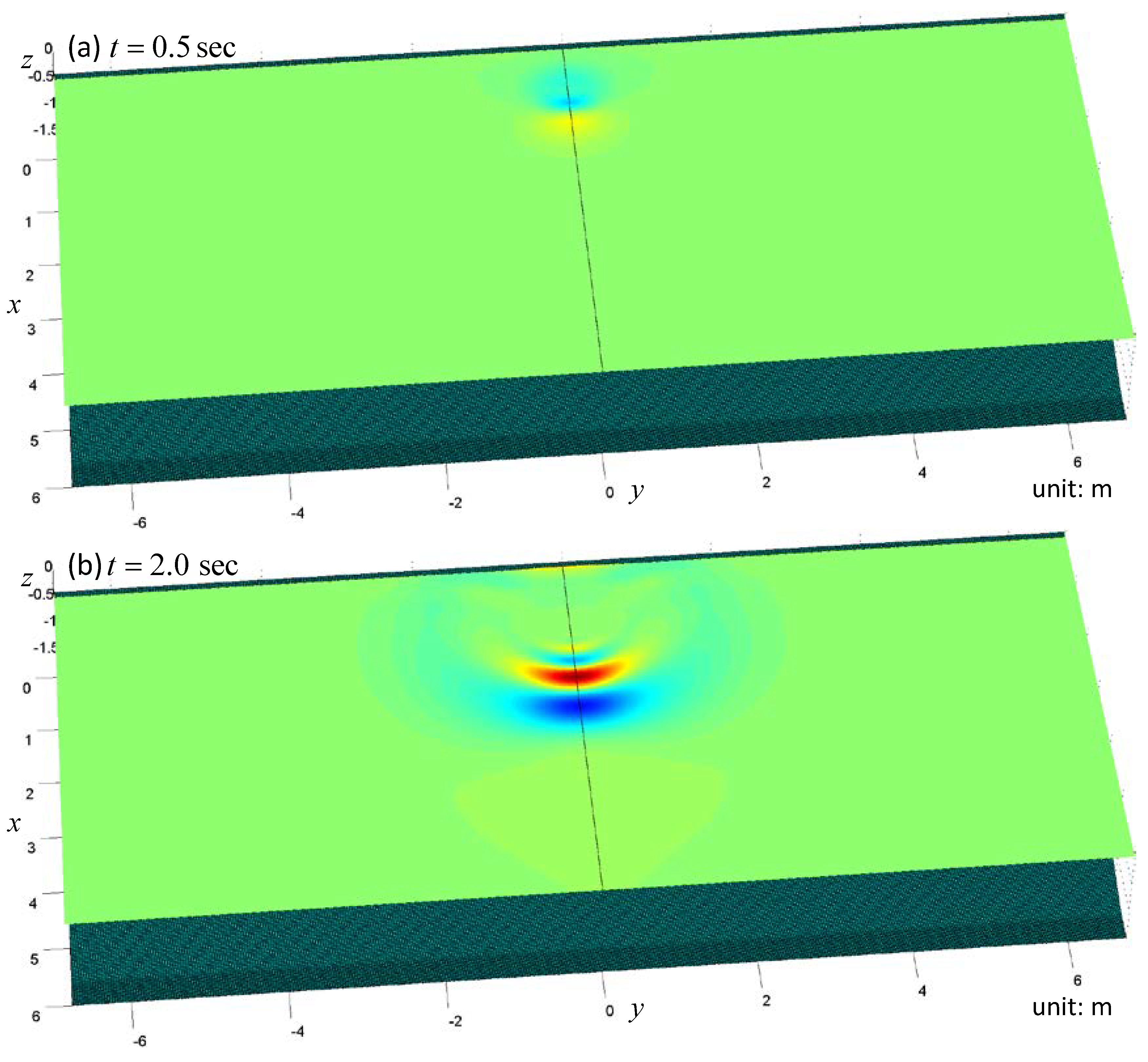
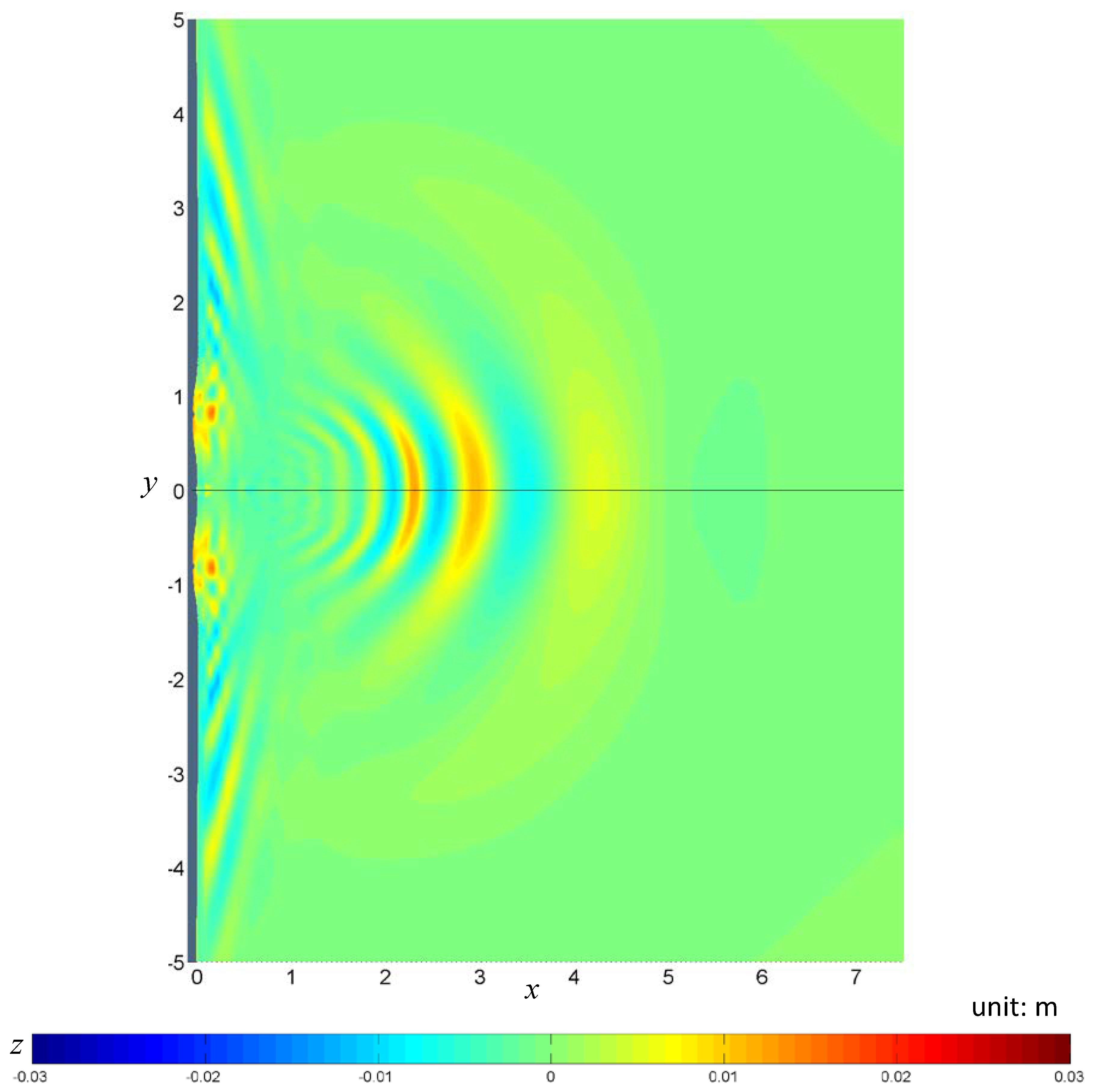
y = 0 do not show up. As the submerged sliding body initially rests closer to the shore, the first run-down comes faster and the first run-up is larger. To see the largest run-up in the simulation, we plotted the distribution of the free surface elevation at
t = 3.9 s in case 1, as shown in
Figure 17. From this figure and the first panel of
Figure 16, one can conclude that the run-up at
y = ±0.8 m comes so drastically, after the submerged landslide has occurred for a while.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}