A Wall Boundary Condition for the Simulation of a Turbulent Non-Newtonian Domestic Slurry in Pipes



Abstract
:1. Introduction
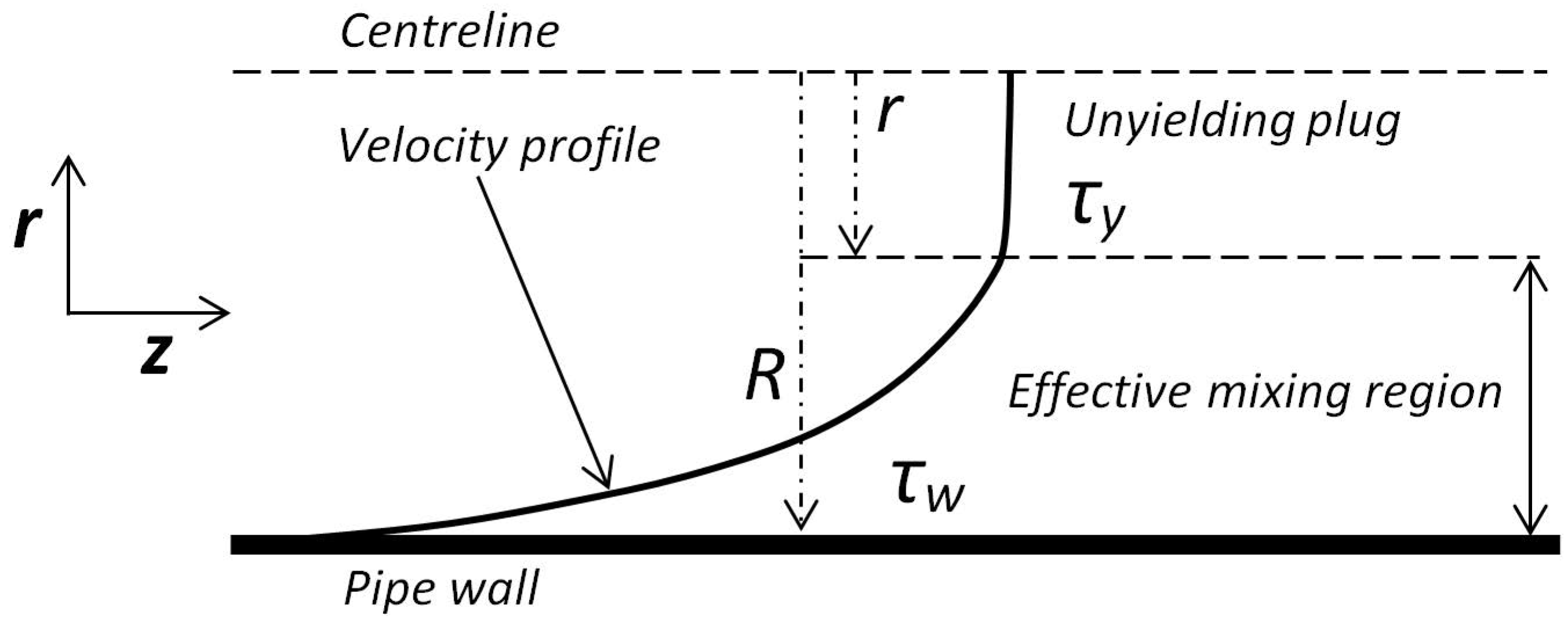
1.1. Herschel–Bulkley Fluids
1.2. Computational Fluid Dynamics (CFD) and Non-Newtonian Fluids
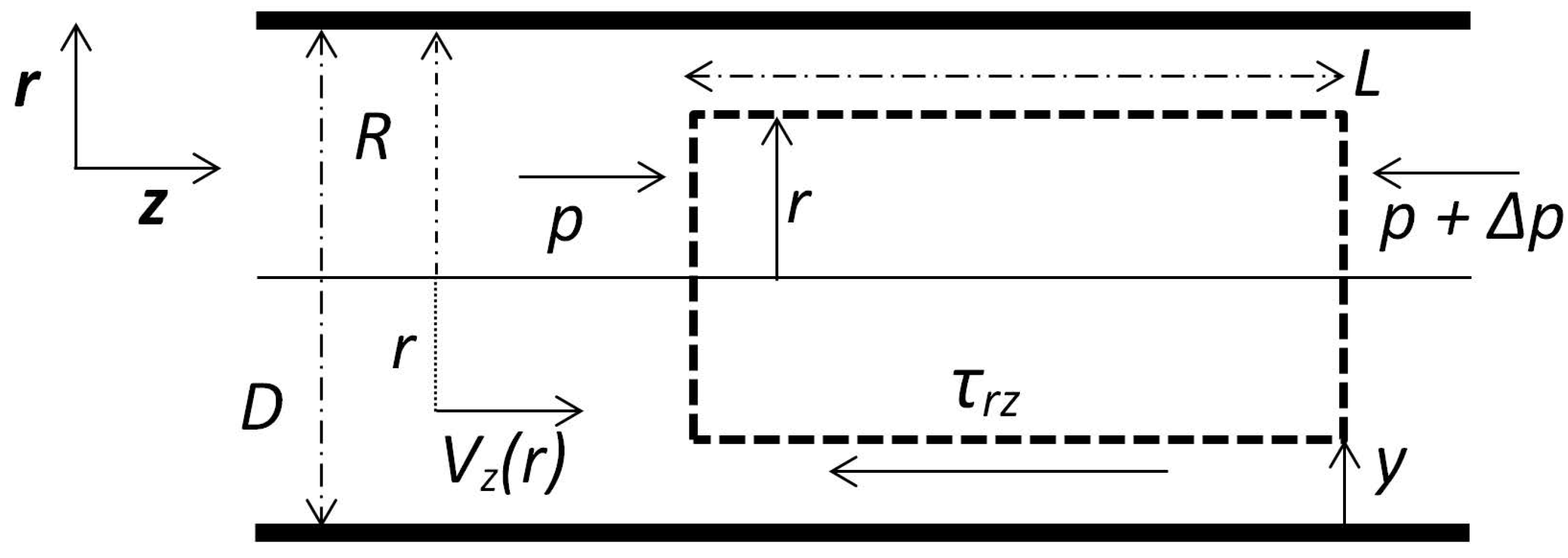
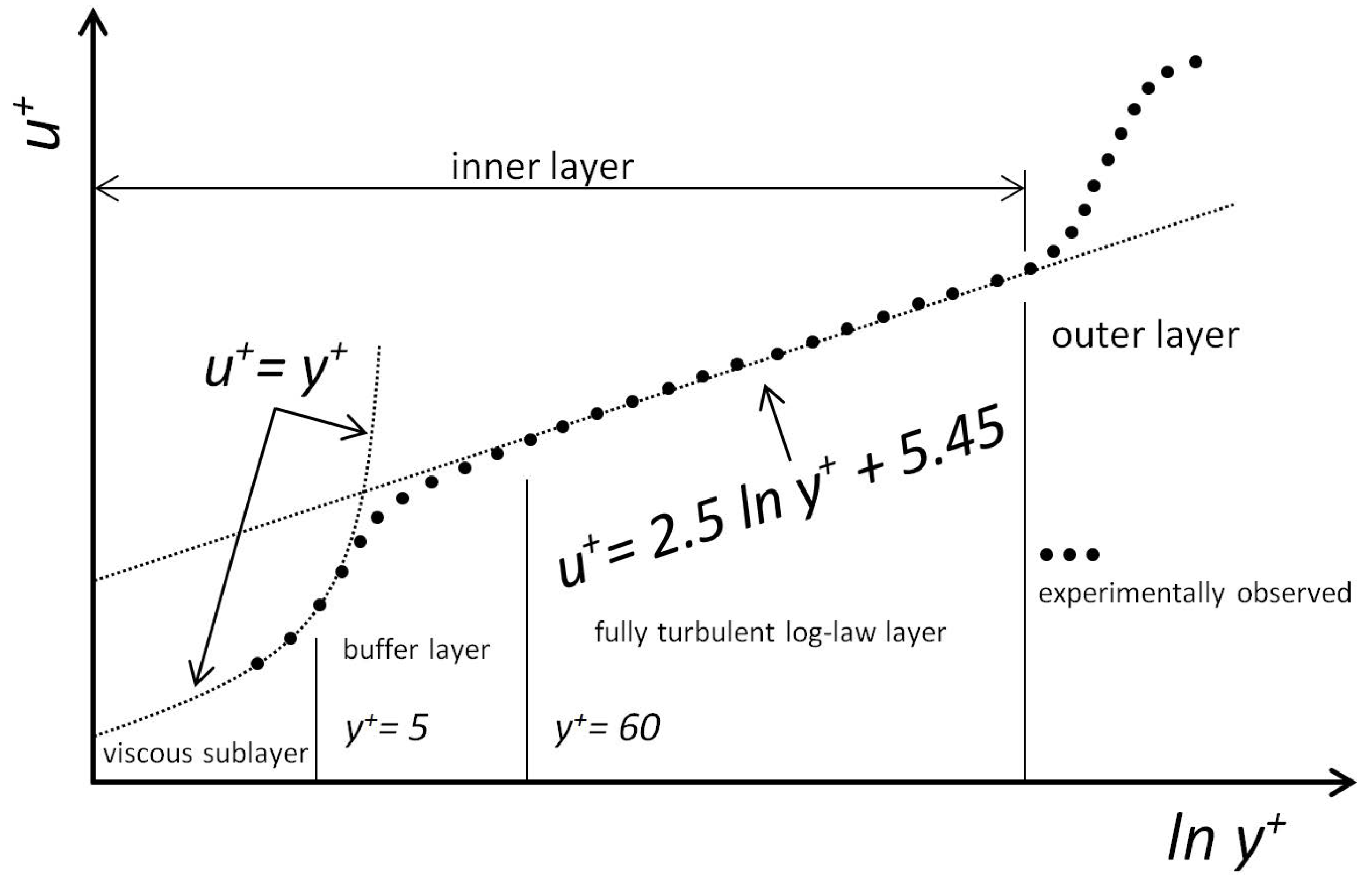
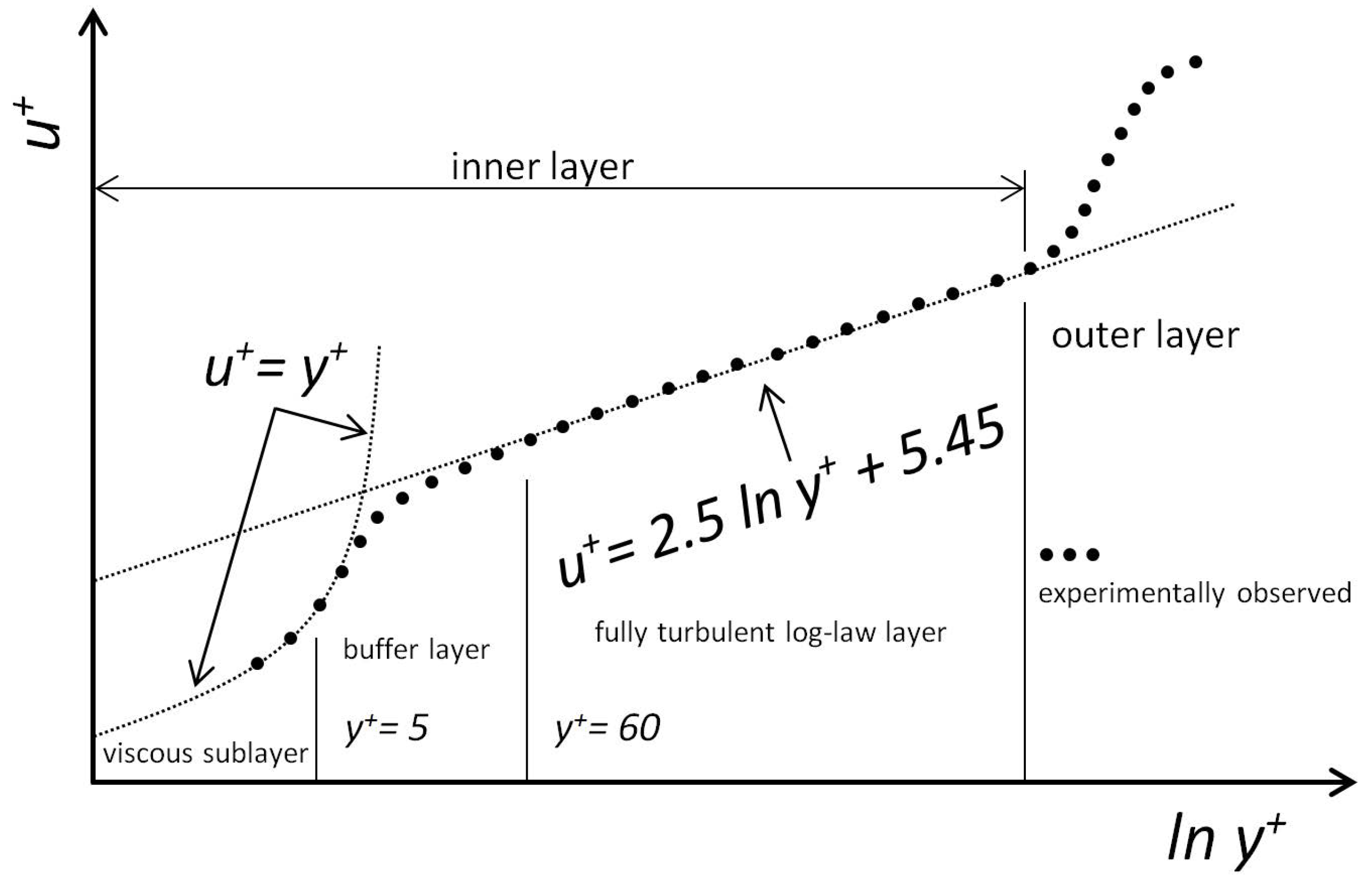
1.3. Wall-Bounded Flows
1.4. Non-Newtonian Wall Functions
1.5. Approach
2. Methodology
2.1. Solver and Numerics
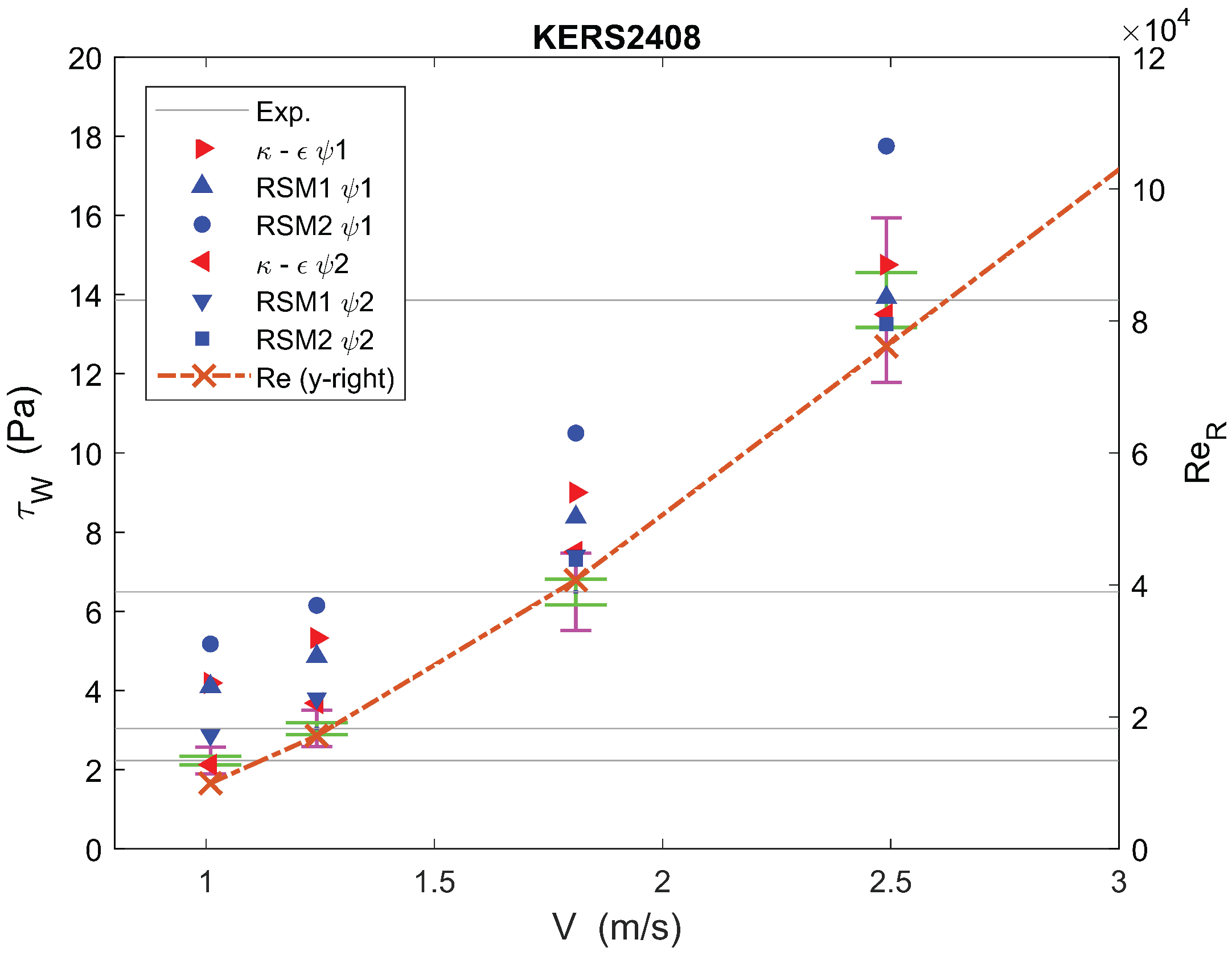
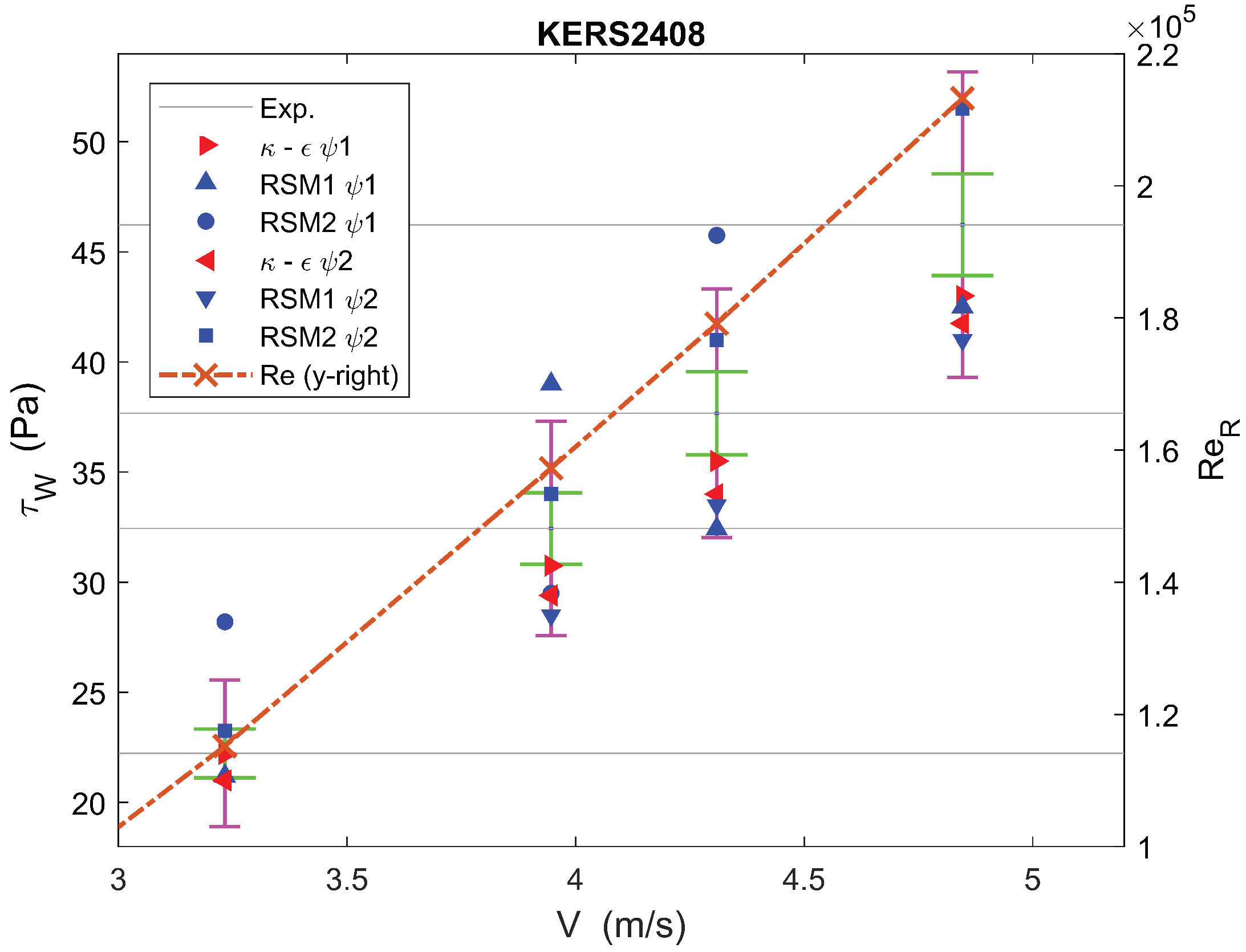
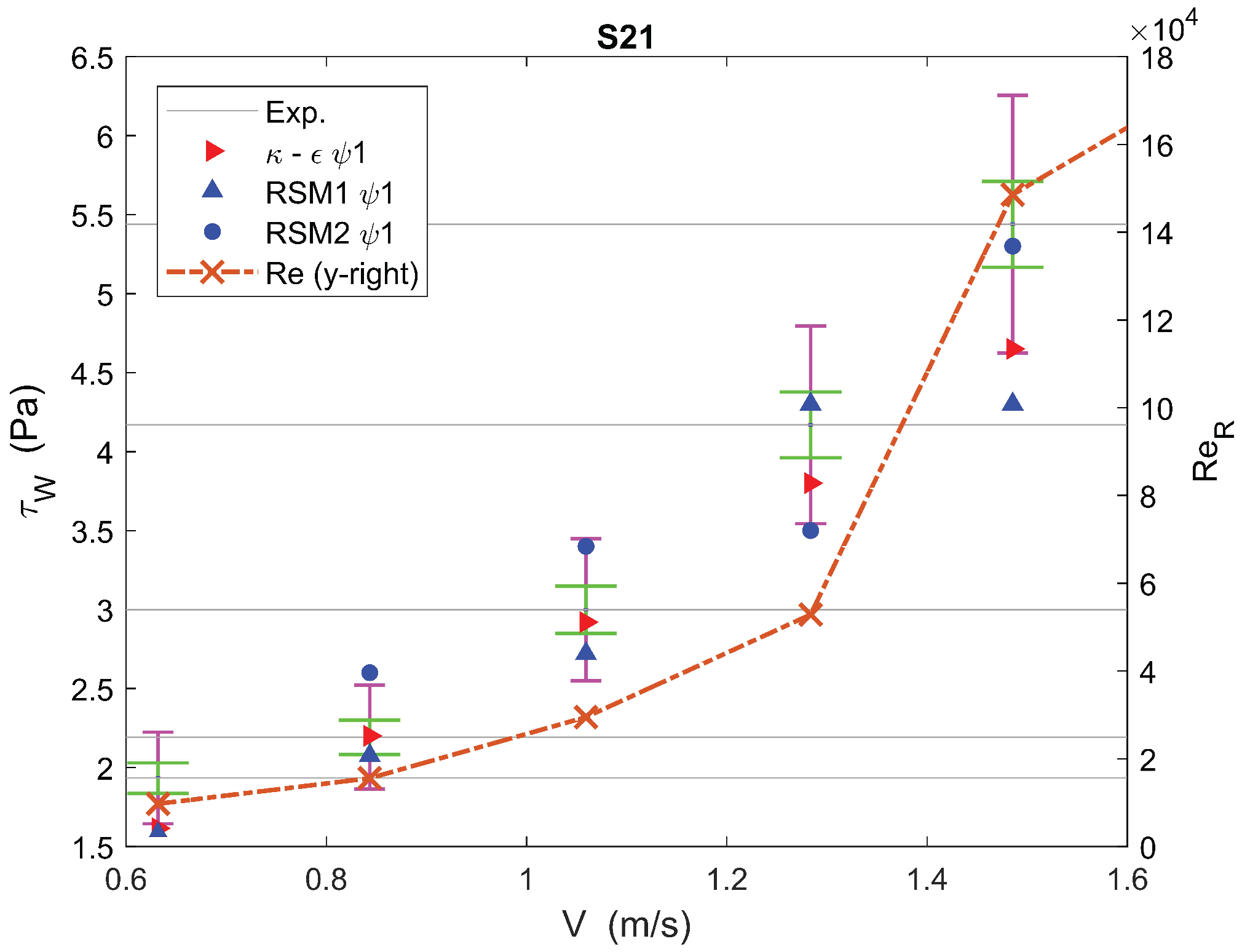
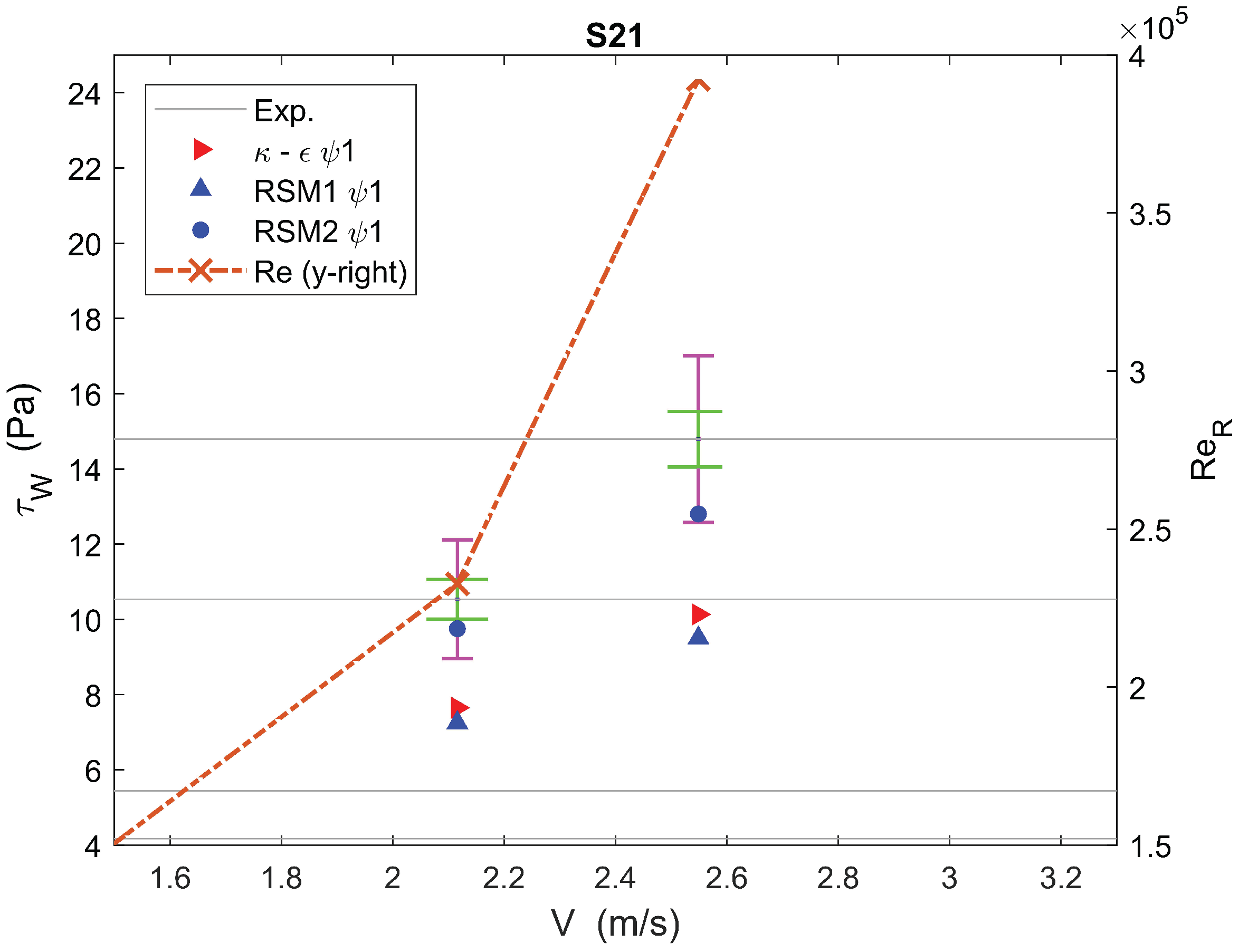
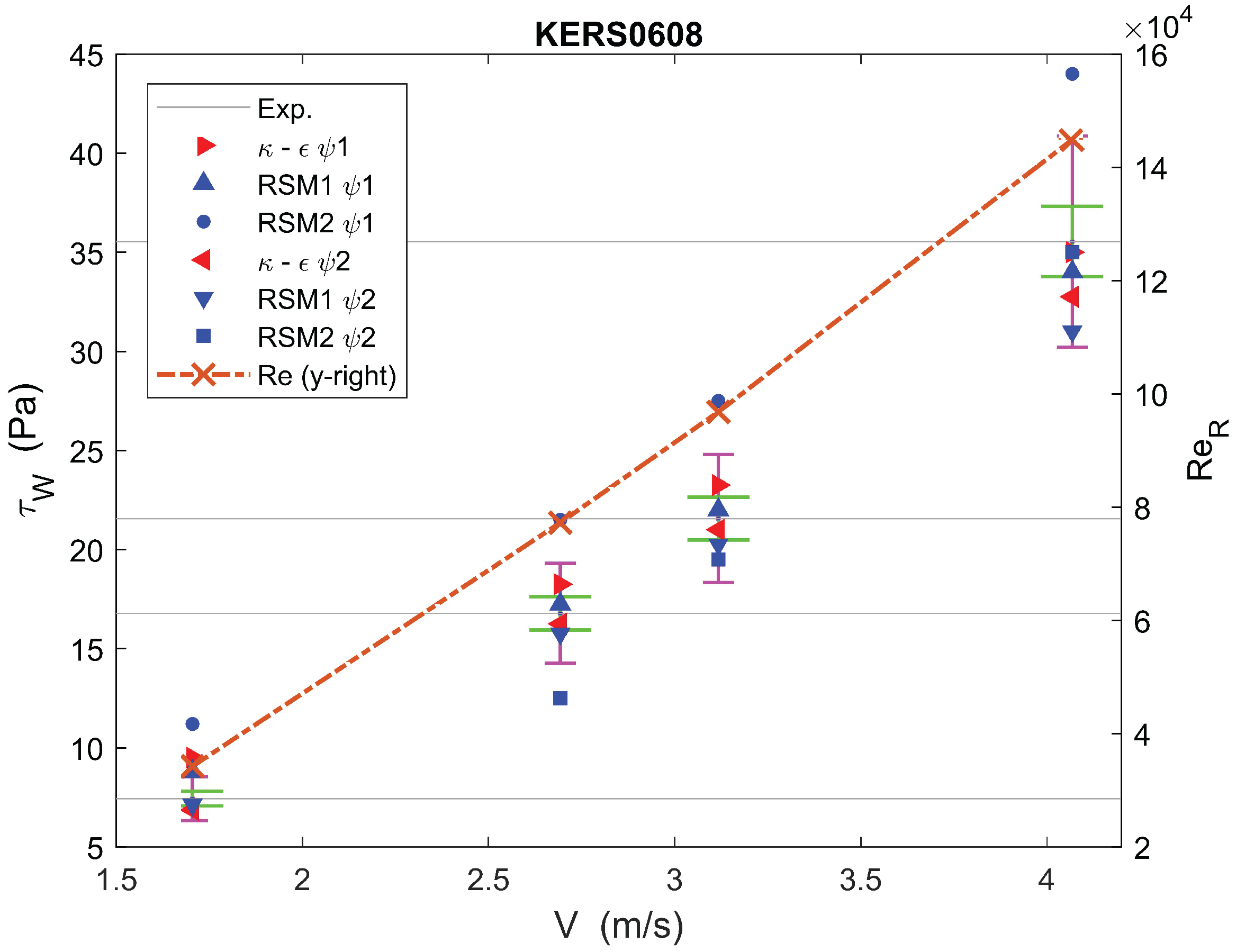
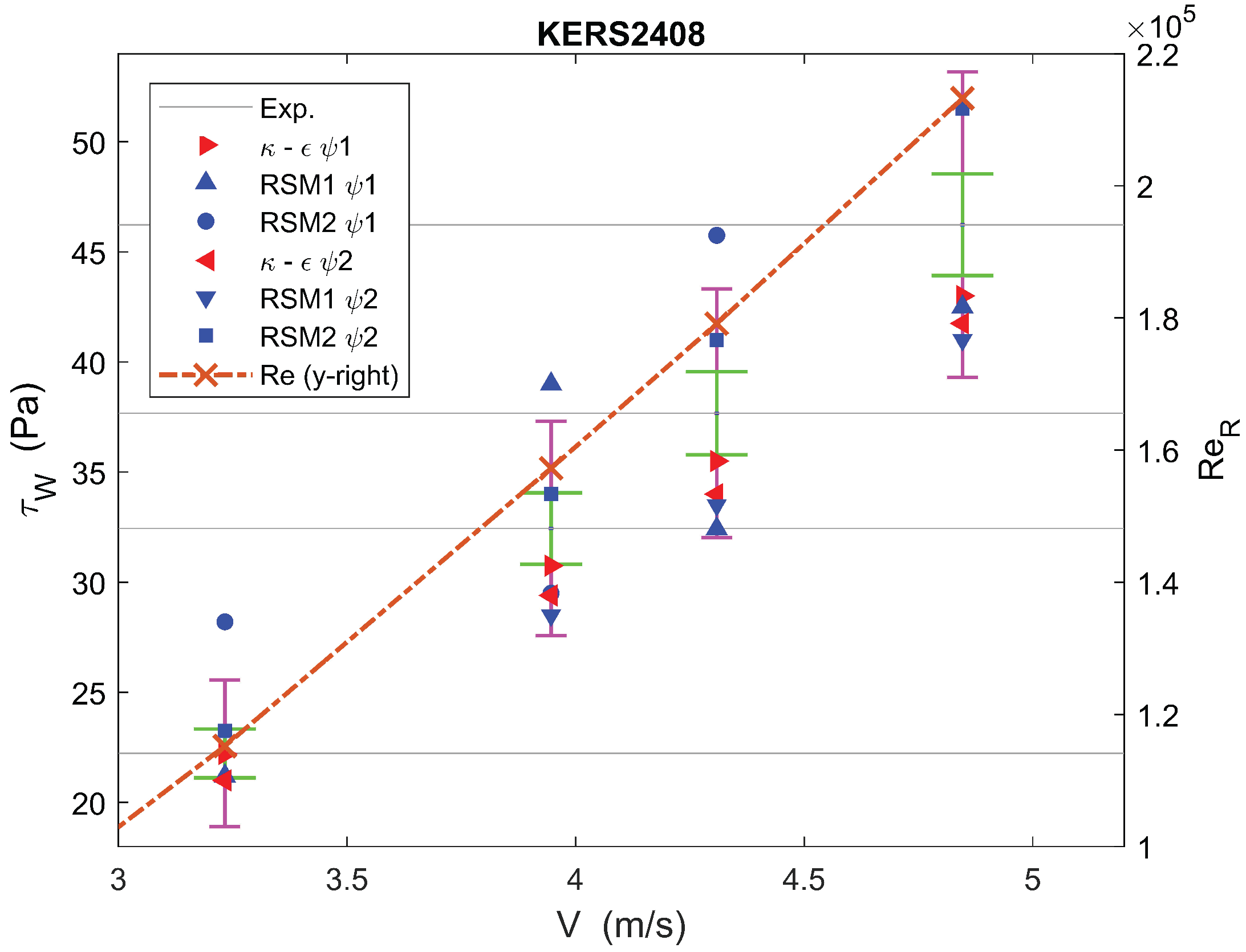
- The Reynolds stresses in the wall-adjacent cells are calculated explicitly in terms of the wall shear stress. This setting shall be referred to as RSM1.
- A transport equation for is solved to obtain the Reynolds stresses in the cells adjacent to the wall, which shall be quoted as RSM2.
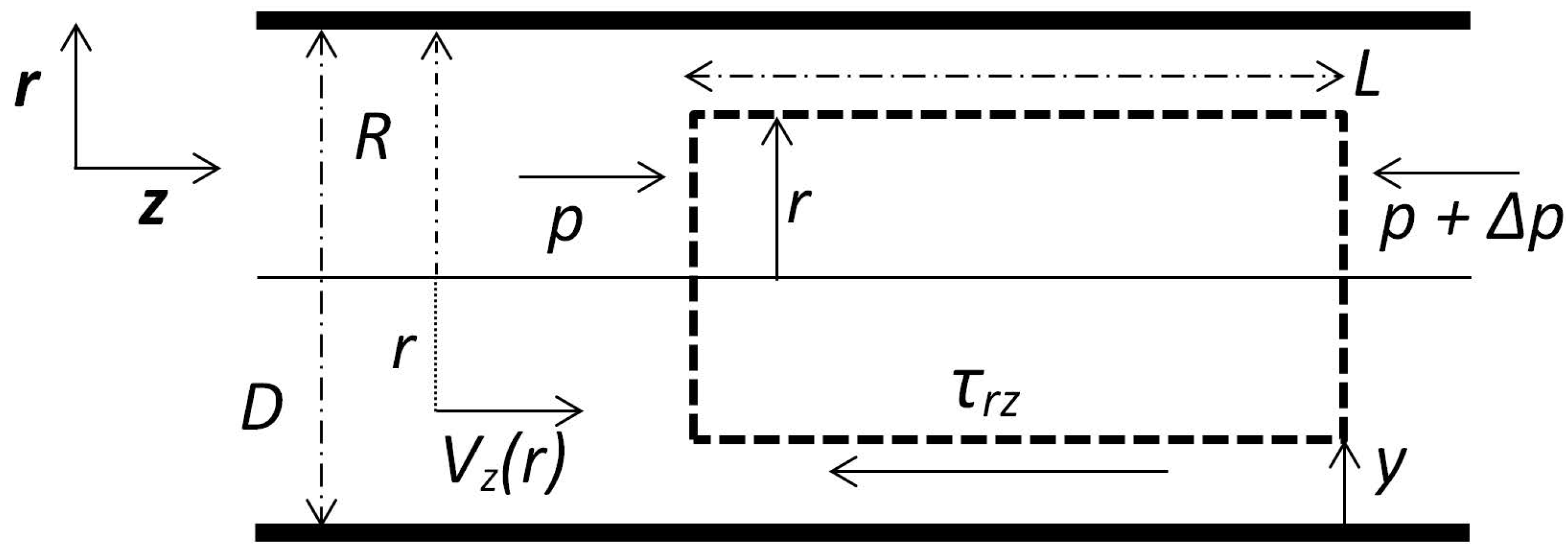
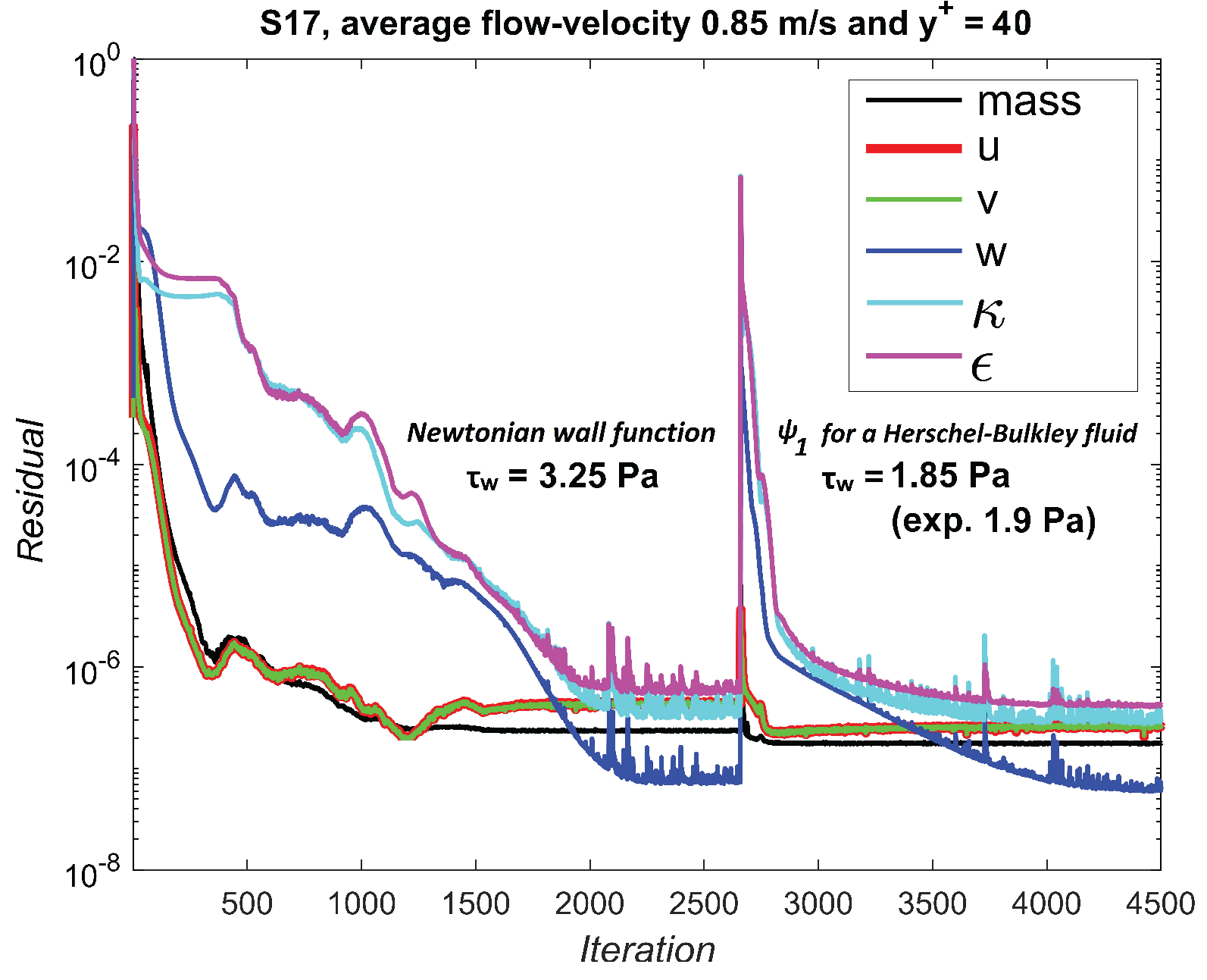
2.2. Wall Modelling: Specified Shear Approach
2.2.1. An Appropriate Reynolds Number
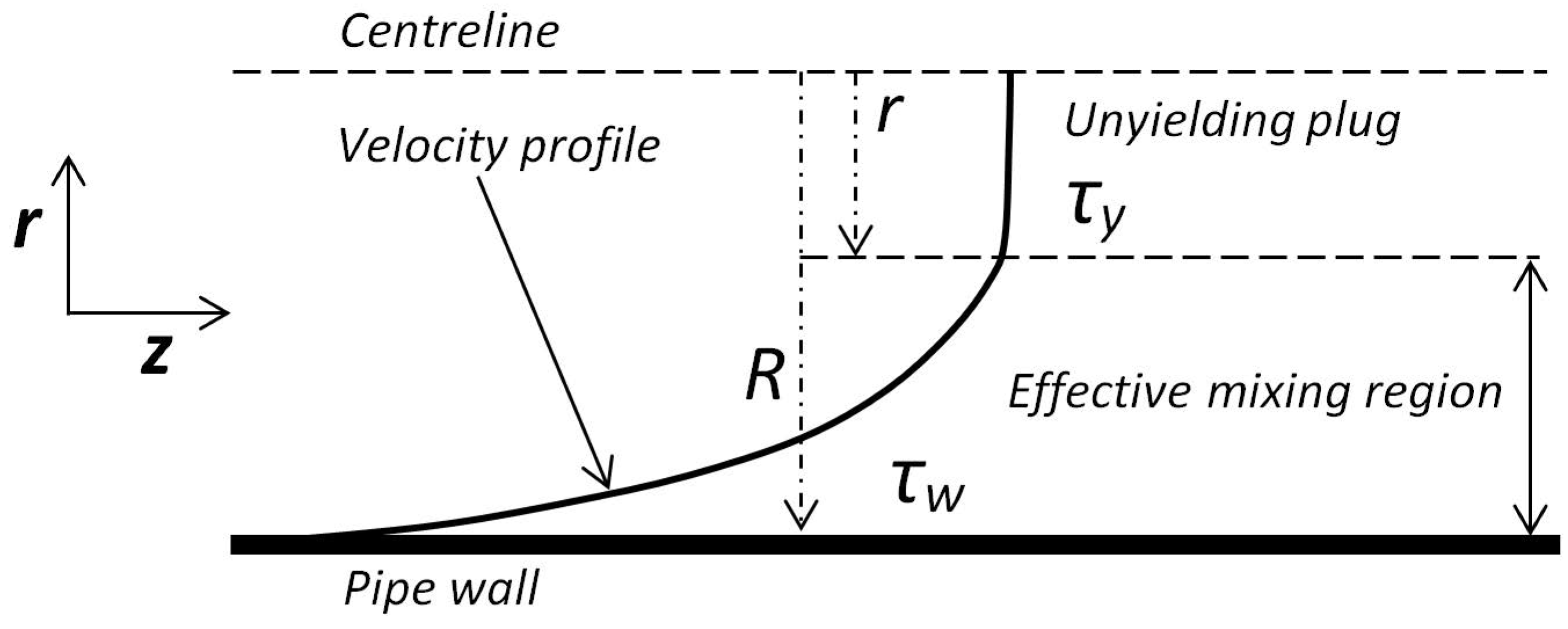
2.2.2. Specified Wall Shear Based on Prandtl’s Mixing Length
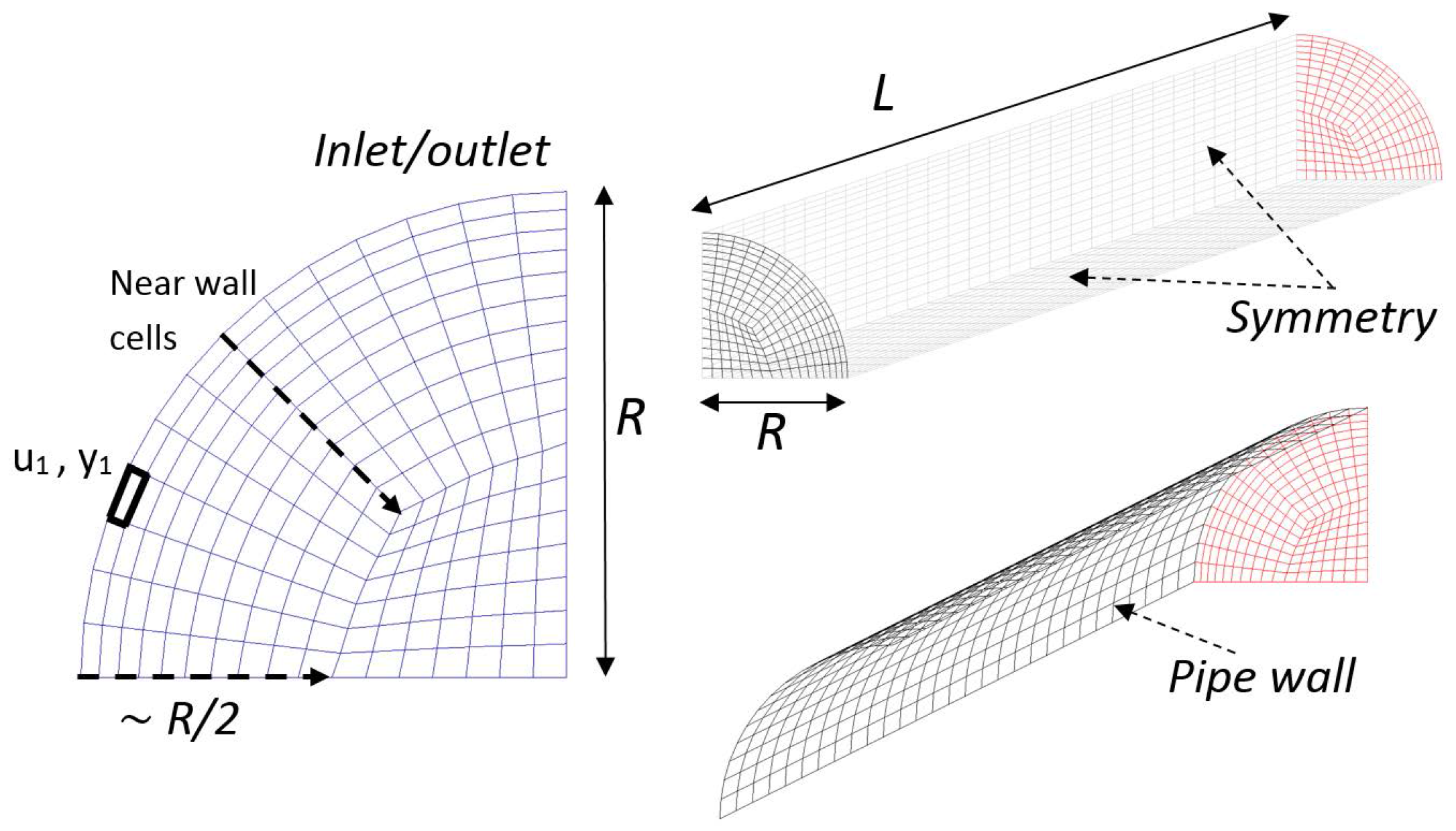
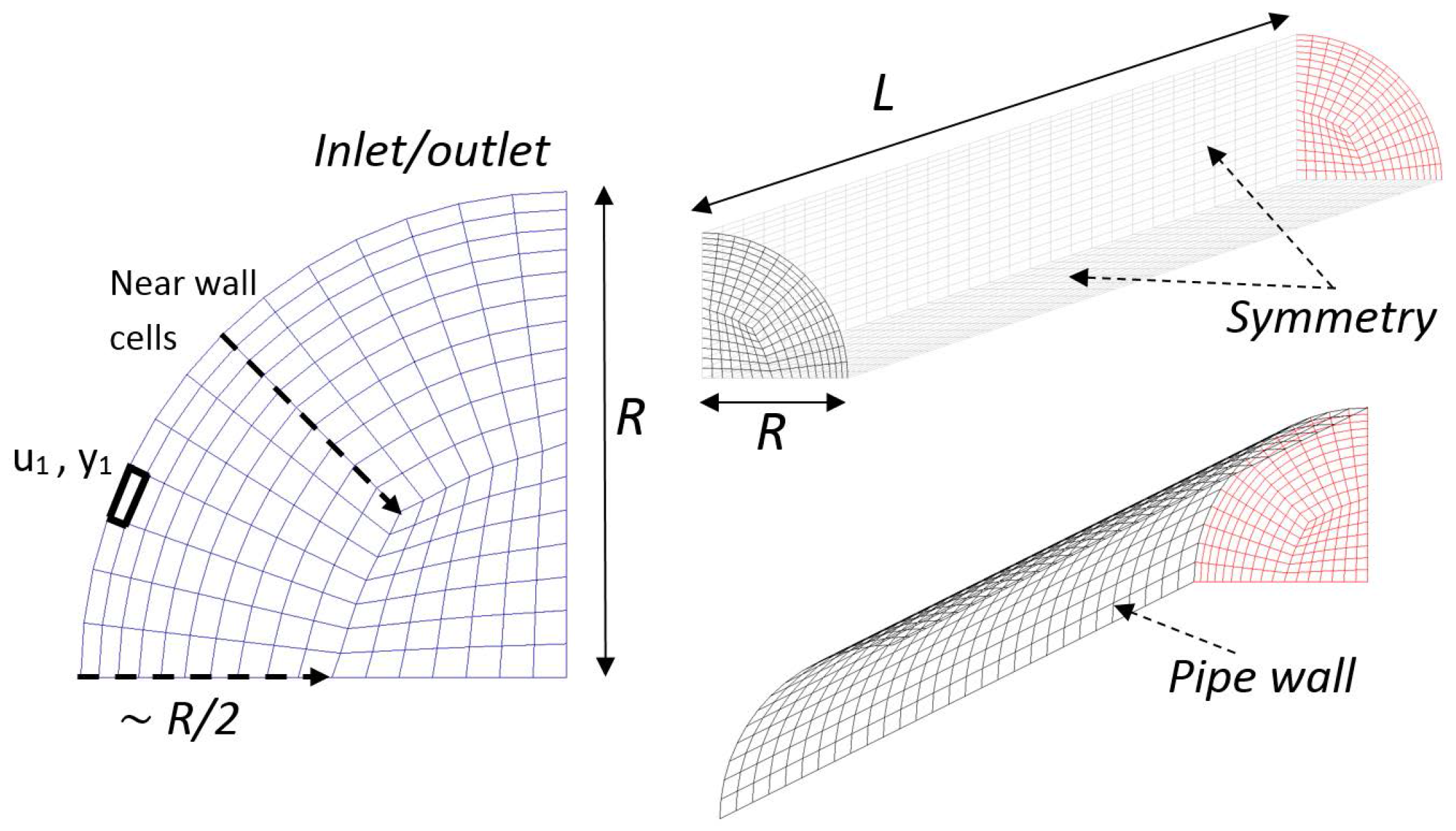
2.3. Mesh
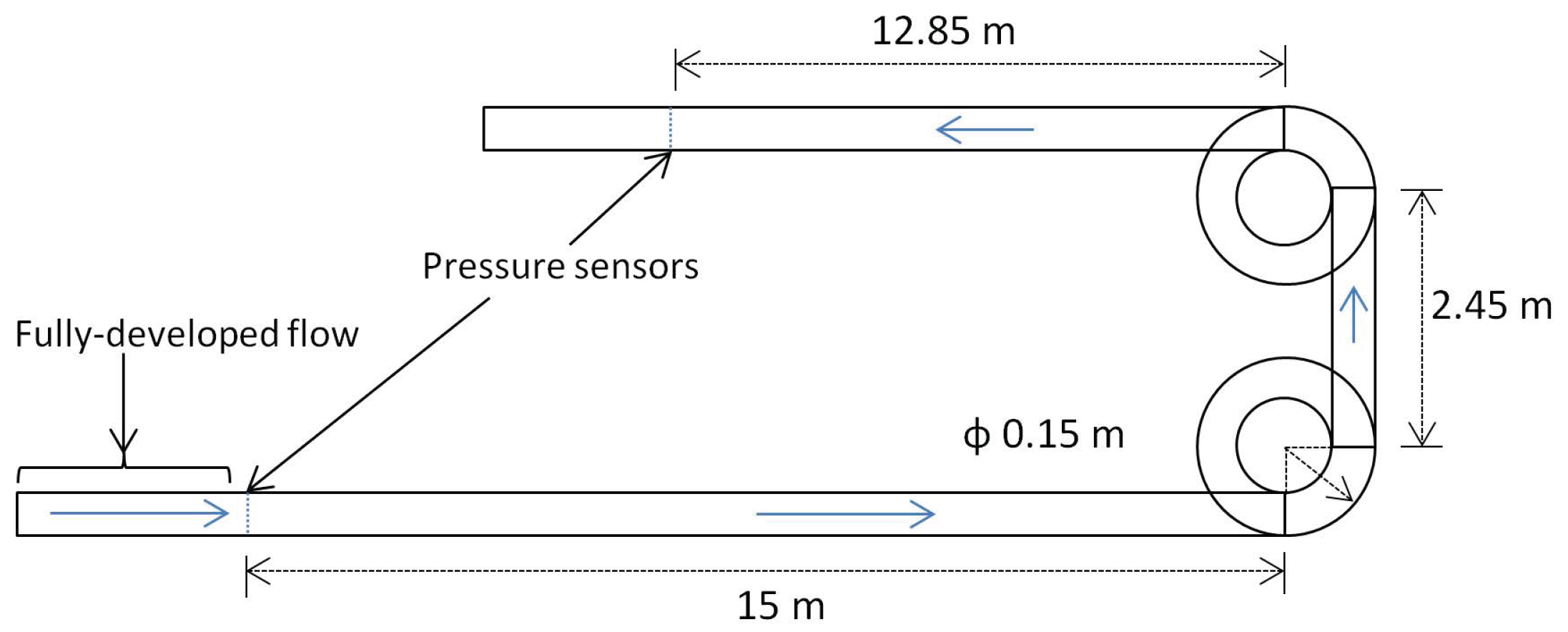
3. Experiments
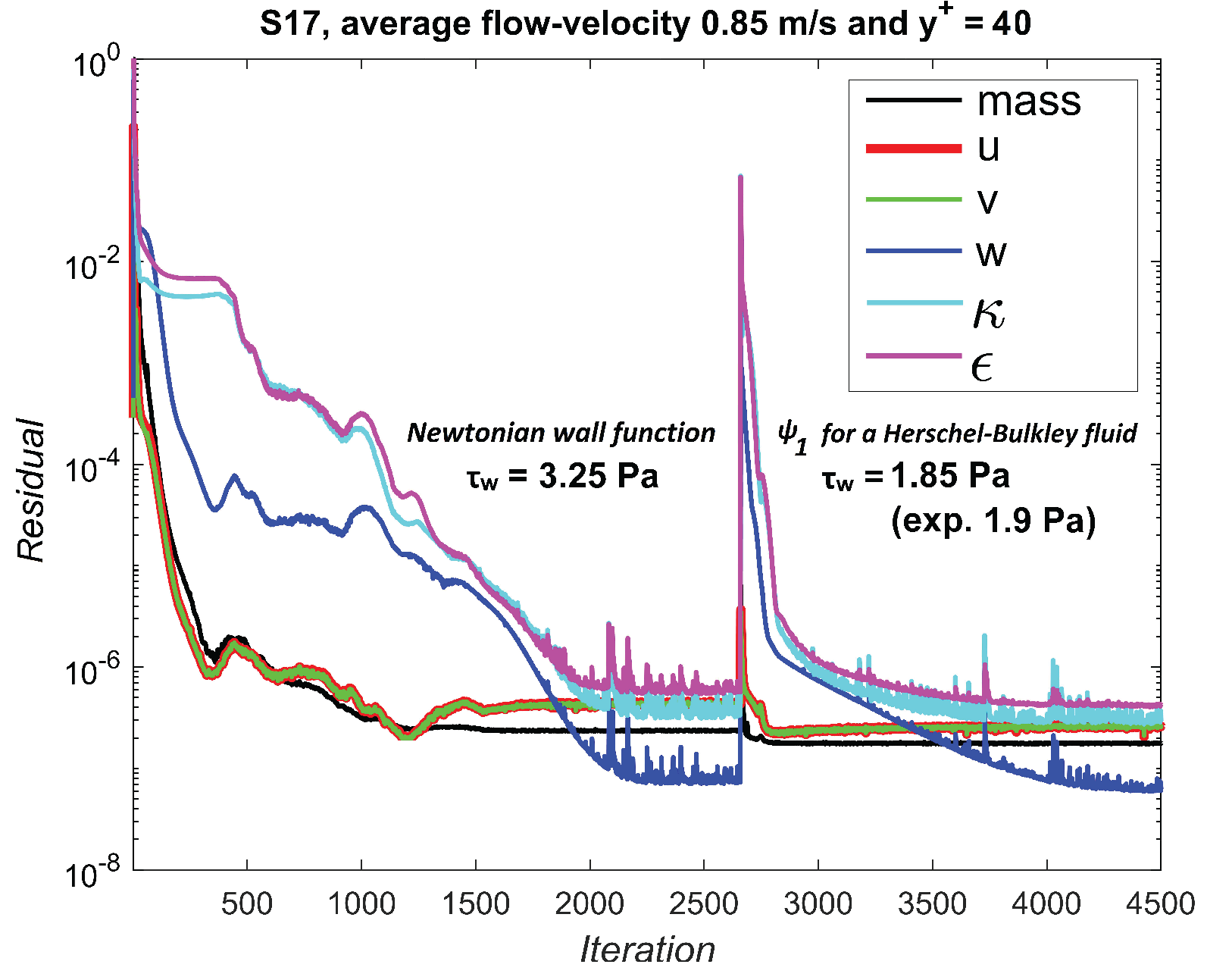
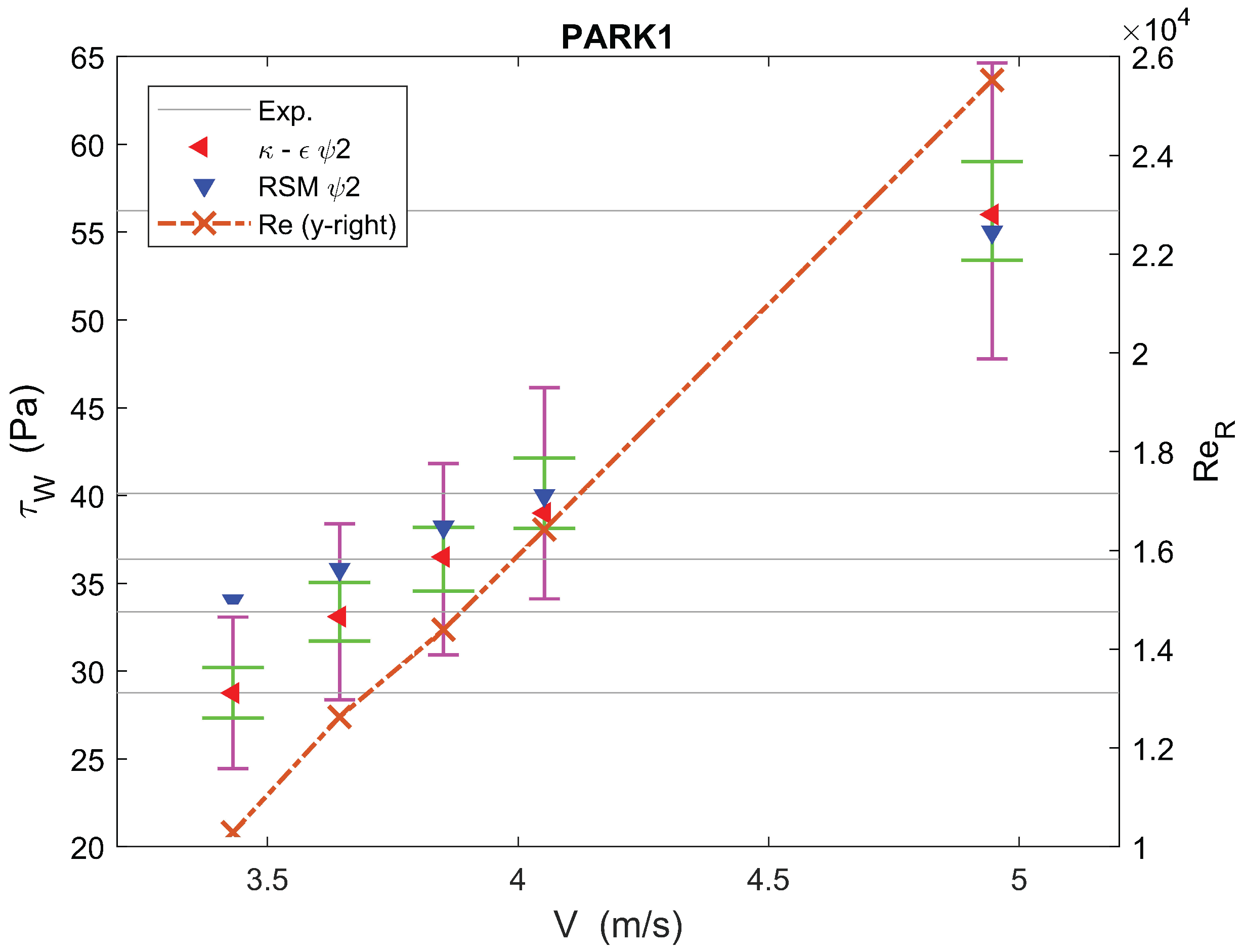
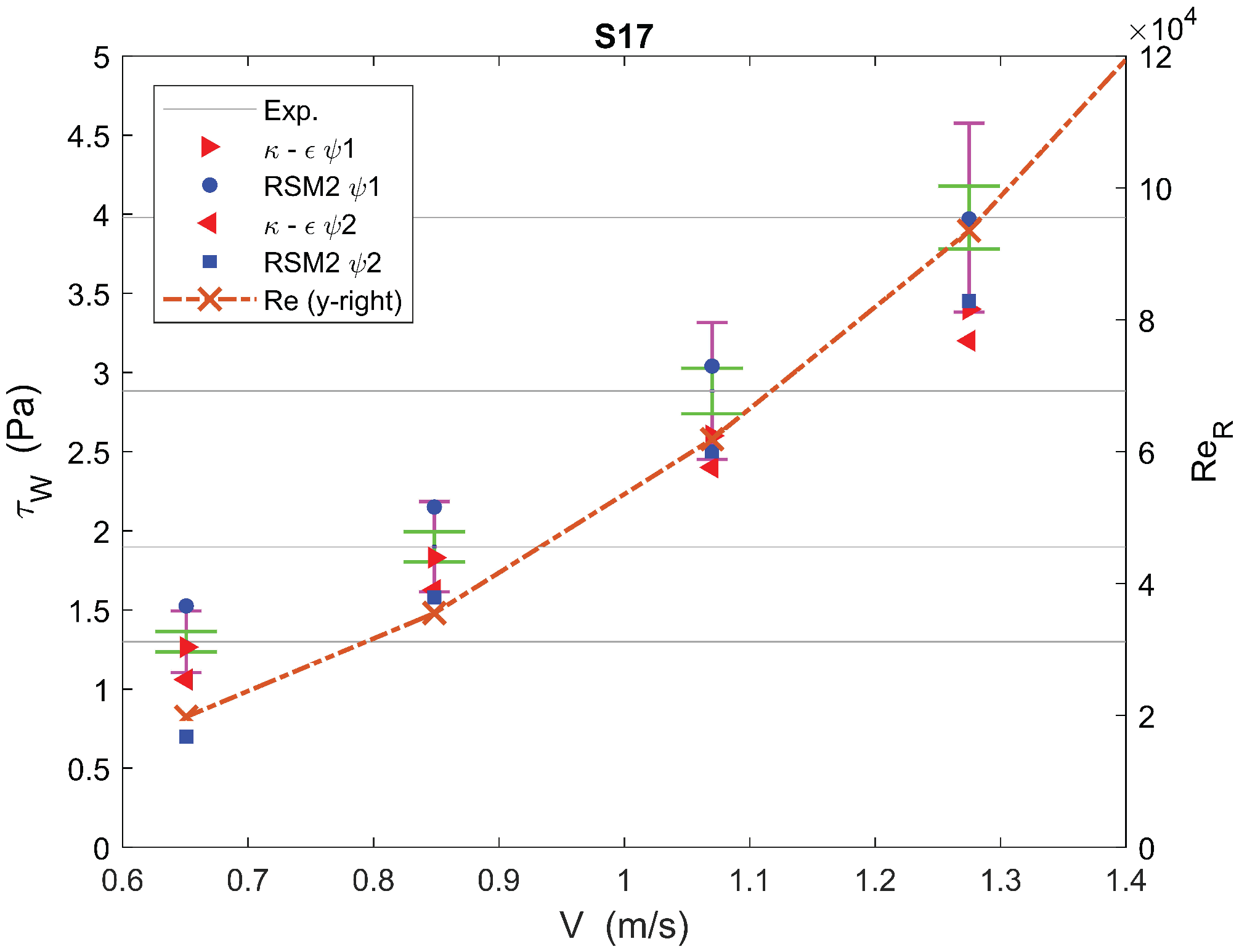
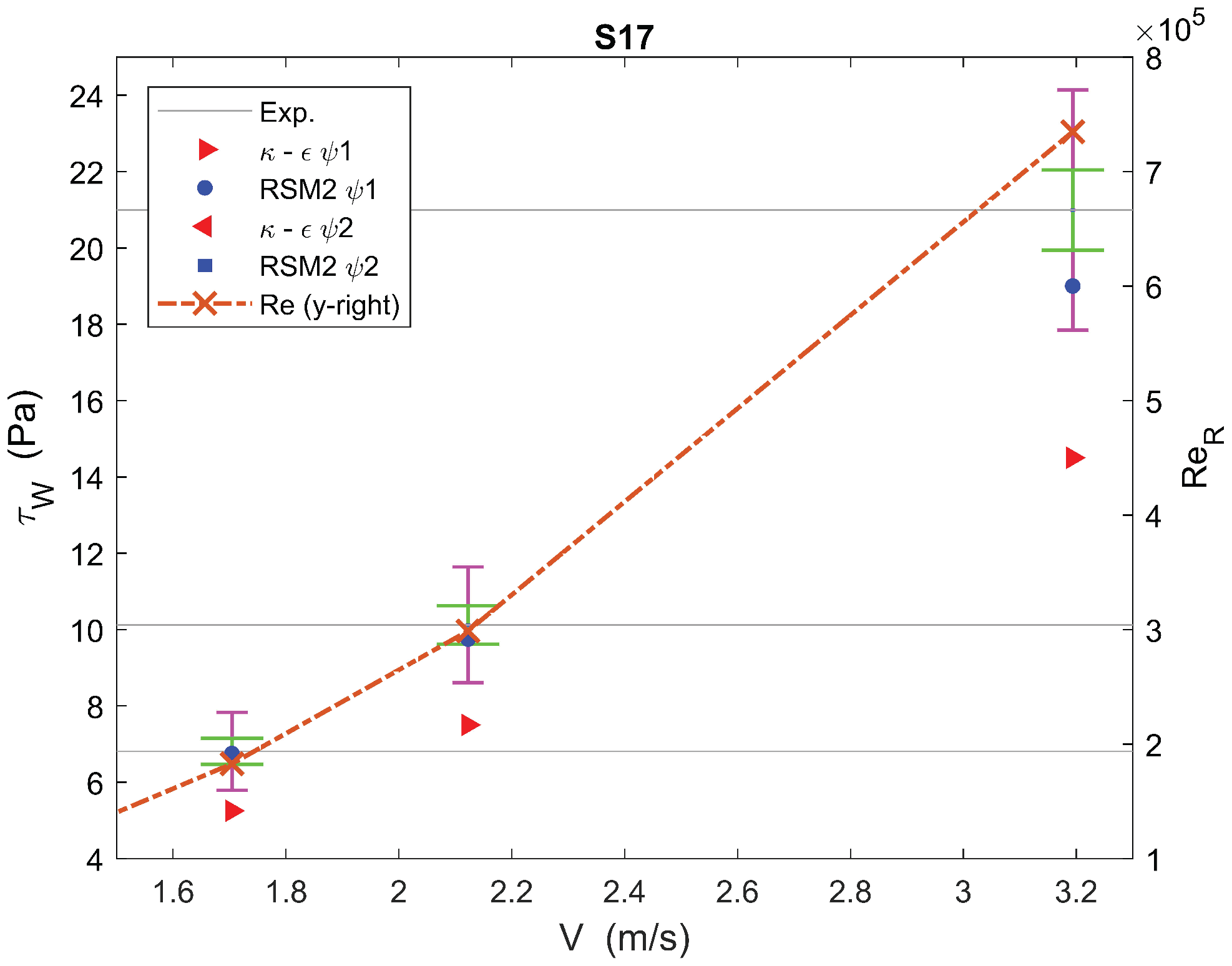
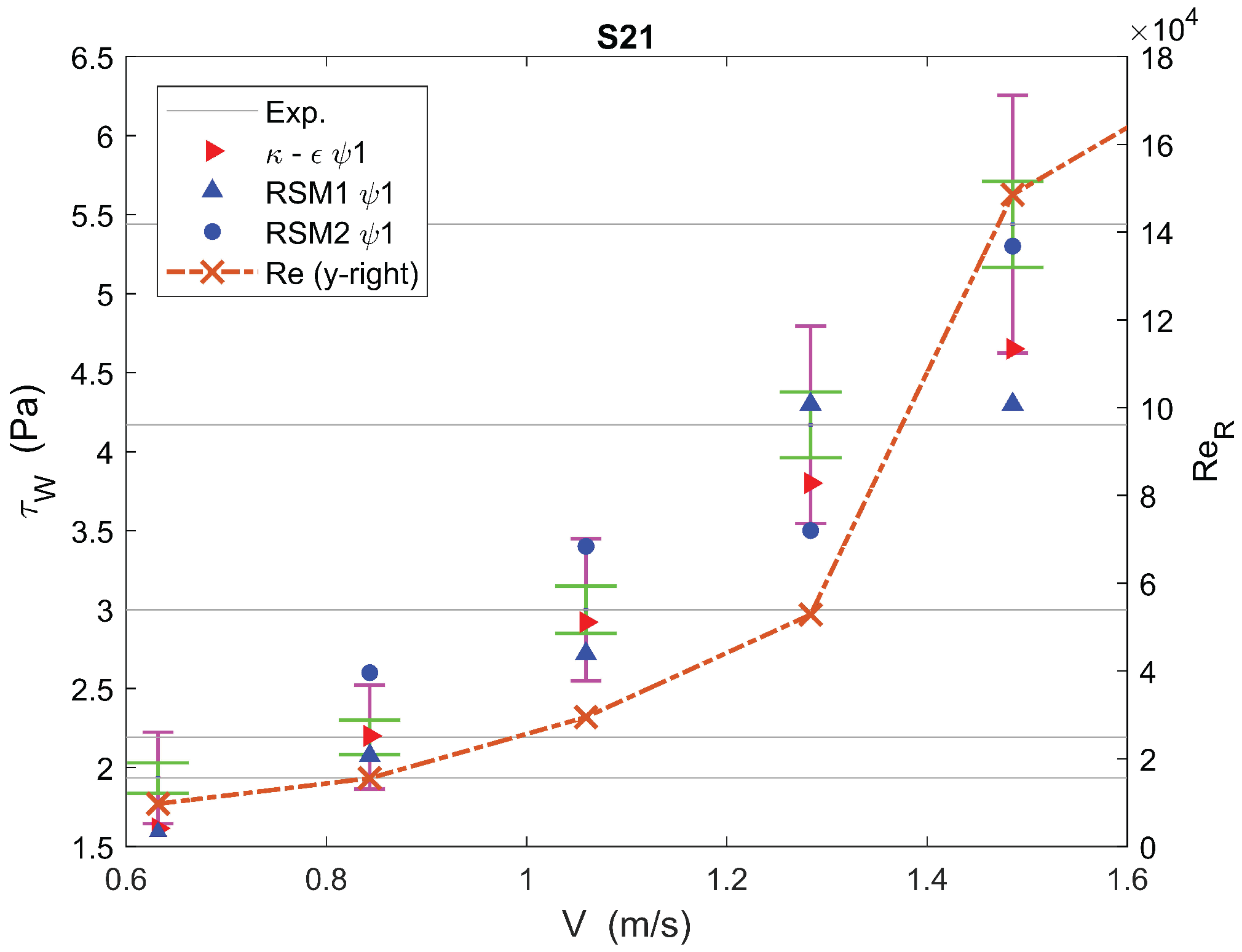
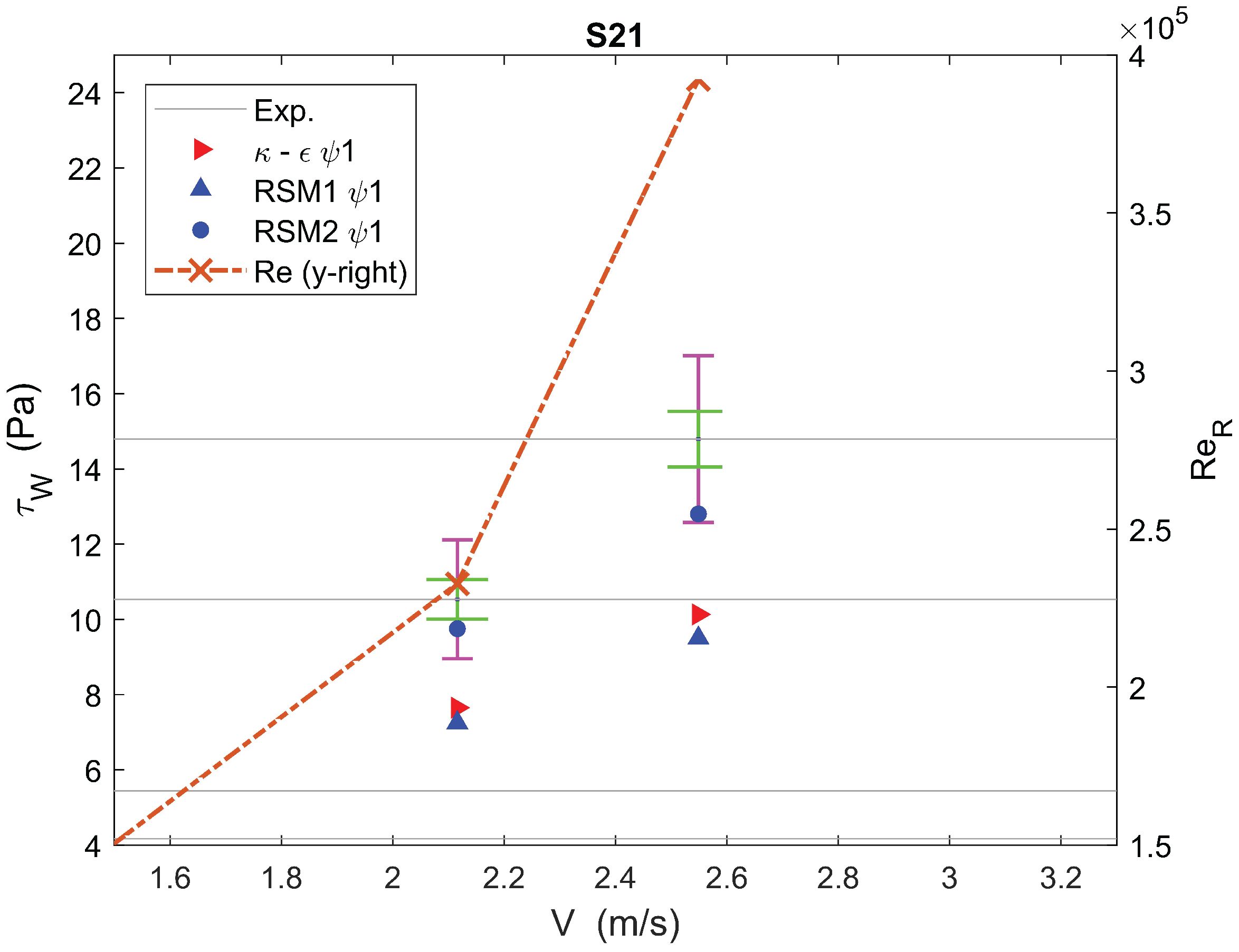
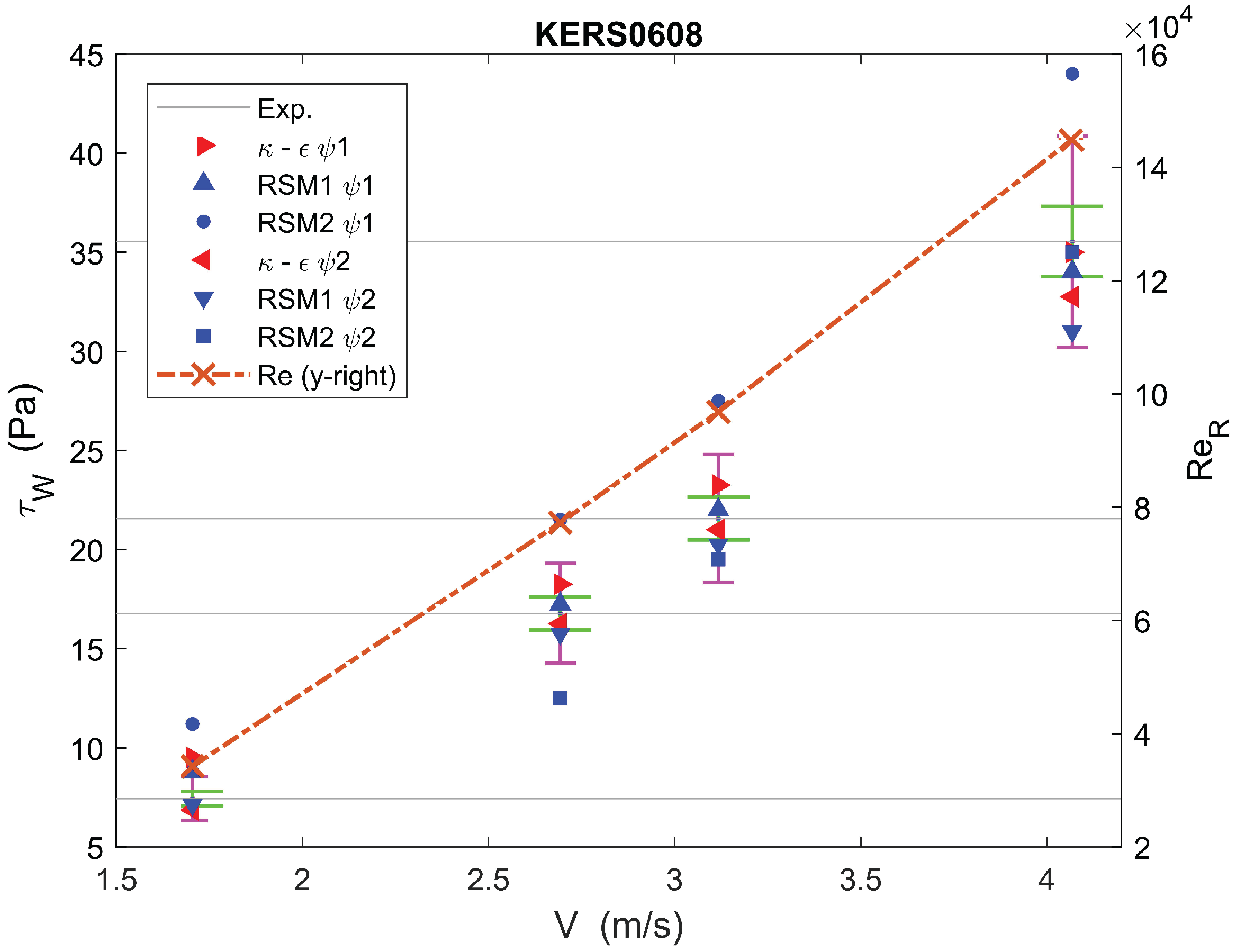
4. Observations
5. Conclusions and Outlook
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chabbra, R.P.; Richardson, J.F. Non-Newtonian Flow in the Process Industries, 1st ed.; Butterworth-Heinemann: Oxford, UK, 1999. [Google Scholar]
- Herschel, W.H.; Bulkley, R. Konsistenzmessungen von Gummi-Benzollösungen. Kolloid-Zeitschrift 1926, 39, 291–300. [Google Scholar] [CrossRef]
- Oldroyd, J.G. A rational formulation of the equations of plastic flow for a Bingham solid. Math. Proc. Camb. Philos. Soc. 1947, 43, 100–105. [Google Scholar] [CrossRef]
- Skelland, A.H.P. Non-Newtonian Flow and Heat Transfer; John Wiley & Sons: New York, NY, USA, 1967. [Google Scholar]
- Govier, G.W.; Aziz, K. The Flow of Complex Mixtures in Pipes; R.E. Krieger Pub. Co.: New York, NY, USA, 1972. [Google Scholar]
- Bird, R.B.; Dai, G.C.; Yarusso, B.J. The rheology and flow of viscoplastic materials. Rev. Chem. Eng. 1983, 1, 1–70. [Google Scholar] [CrossRef]
- Bird, R.B.; Armstrong, R.C.; Hassager, O. Dynamics of Polymeric Liquids, Vol. 1: Fluid Mechanics, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1987. [Google Scholar]
- Heywood, N.I.; Cheng, D.C.H. Comparison of methods for predicting head loss in turbulent pipe flow of non-Newtonian fluids. Trans. Inst. Meas. Control 1984, 6, 33–45. [Google Scholar] [CrossRef]
- Torrance, B.M. Friction factors for turbulent non-Newtonian fluid flow in circular pipes. S. Afr. Mech. Eng. 1963, 13, 89–91. [Google Scholar]
- Hanks, R.W. Low Reynolds number turbulent pipeline flow of pseudohomogeneous slurries. In Proceedings Hydrotransport 5 Conference, Paper C2; BHRA Fluid Eng.: Cranfield, UK, 1978; pp. 8–11. [Google Scholar]
- Wilson, K.C.; Thomas, A.D. A new analysis of the turbulent flow of non-Newtonian fluids. Can. J. Chem. Eng. 1985, 63, 539–546. [Google Scholar] [CrossRef]
- Thomas, A.D.; Wilson, K.C. New analysis of non-Newtonian turbulent flow-yield-power-law fluids. Can. J. Chem. Eng. 1987, 65, 335–338. [Google Scholar] [CrossRef]
- Slatter, P.T. TranSitional and Turbulent Flow of Non-Newtonian Slurries in Pipes. Ph.D. Thesis, Department of Civil Engineering, University of Cape Town, Cape Town, South Africa, 1995. [Google Scholar]
- Ferziger, J.; Perić, M. Computational Methods for Fluid Dynamics, 3rd ed.; Springer Science and Business Media: Berlin, Germany, 2012. [Google Scholar]
- Davidson, P.A. Turbulence—An Introduction for Scientists and Engineers; Oxford University Press: Oxford, UK, 2004. [Google Scholar]
- Gavrilov, A.A.; Rudyak, V.Y. Reynolds-averaged modeling of turbulent flows of power-law fluids. J. Non-Newton. Fluid Mech. 2016, 227, 45–55. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modeling in CFD, 3rd ed.; DCW Industries: La Cañada Flintridge, CA, USA, 2006. [Google Scholar]
- Launder, B.E.; Spalding, D.B. The numerical computation of turbulent flows. Comput. Methods Appl. Mech. Eng. 1974, 3, 269–289. [Google Scholar] [CrossRef]
- Launder, B.E.; Reece, G.J.; Rodi, W. Progress in the development of a Reynolds-stress turbulence closure. J. Fluid Mech. 1975, 68, 537–566. [Google Scholar] [CrossRef]
- Gori, F.; Boghi, A. A three dimensional exact equation for the turbulent dissipation rate of Generalised Newtonian Fluids. Int. Commun. Heat Mass Transf. 2012, 39, 477–485. [Google Scholar] [CrossRef]
- Pinho, F.; Li, C.; Younis, B.; Sureshkumar, R. A low Reynolds number turbulence closure for viscoelastic fluids. J. Non-Newton. Fluid Mech. 2008, 154, 89–108. [Google Scholar] [CrossRef]
- Leighton, R.; Walker, D.T.; Stephens, T.; Garwood, G. Reynolds stress modelling for drag reducing viscoelastic flows. In Proceedings of the ASME Fluids Engineering Division Summer Meeting, Honolulu, HI, USA, 6–10 July 2003; Volume 1, pp. 735–744. [Google Scholar]
- Rudman, M.; Blackburn, H.M. Direct numerical simulation of turbulent non-Newtonian flow using a spectral element method. Appl. Math. Model. 2006, 30, 1229–1248. [Google Scholar] [CrossRef]
- Wilcox, D. Reassessment of the scale-determining equation for advanced turbulence models. AIAA J. 1988, 26, 1299–1310. [Google Scholar] [CrossRef]
- Malin, M.R. Turbulent pipe flow of power-law fluids. Int. Commun. Heat Mass Transf. 1997, 24, 977–988. [Google Scholar] [CrossRef]
- Malin, M.R. The turbulent flow of Bingham plastic fluids in smooth circular tubes. Int. Commun. Heat Mass Transf. 1997, 24, 793–804. [Google Scholar] [CrossRef]
- Malin, M.R. Turbulent pipe flow of Herschel-Bulkley fluids. Int. Commun. Heat Mass Transf. 1998, 25, 321–330. [Google Scholar] [CrossRef]
- Dodge, D.W.; Metzner, A.B. Turbulent flow of non-Newtonian systems. AIChE J. 1959, 5, 189–204. [Google Scholar] [CrossRef]
- Bartosik, A.S. Modification of κ-ϵ model for slurry flow with yield stress. In Proceedings of the 10th International Conference on Numerical Methods in Laminar and Turbulent Flows, Swansea, UK, 21–25 July 1997; Volume 10, pp. 265–274. [Google Scholar]
- Bartosik, A.S. Modelling of a turbulent flow using the Herschel-Bulkley rheological model. Chem. Process Eng. Inzynieria Chemiczna i Procesowa 2006, 27, 623–632. [Google Scholar]
- Clapp, R.M. Turbulent heat transfer in pseudoplastic non-Newtonian fluids. In International Developments of Heat Transfer Part III; The American Society of Mechanical Engineers: New York, NY, USA, 1961; pp. 652–661. [Google Scholar]
- Sawko, R. Mathematical and Computational Methods of Non-Newtonian Multiphase Flows. Ph.D. Thesis, School of Engineering, Cranfield University, Cranfield, UK, 2012. [Google Scholar]
- Singh, J.; Rudman, M.; Blackburn, H.M.; Chryss, A.; Pullum, L.; Graham, L.J.W. The importance of rheology characterization in predicting turbulent pipe flow of generalized Newtonian fluids. J. Non-Newton. Fluid Mech. 2016, 232, 11–21. [Google Scholar] [CrossRef]
- Gnambode, P.S.; Orlandi, P.; Ould-Rouiss, M.; Nicolas, X. Large-eddy simulation of turbulent pipe flow of power-law fluids. Int. J. Heat Fluid Flow 2015, 54, 196–210. [Google Scholar] [CrossRef]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Schlichting, H. Boundary-Layer Theory, 8th ed.; Gersten, K., Ed.; Springer: Berlin, Germany, 2017. [Google Scholar]
- Prandtl, L. Zur turbulenten Strömung in glatten Röhren. Zeitschrift für Angewandte Mathematik und Mechanik 1925, 5, 136–139. [Google Scholar]
- Prandtl, L. Neure Ergebnisse der Turbulenzforschung. Zeitschrift des Vereines Deutscher Ingenieure 1933, 77, 105–114. [Google Scholar]
- von Kármán, T. Mechanische Ähnlichkeit Und Turbulenz. In Sonderdrucke aus den Nachrichten von der Gesellschaft der Wissenschaften zu Göttingen: Mathematisch-Physische Klasse; Weidmannsche Buchh: Berlin, Germany, 1930. [Google Scholar]
- ANSYS. ANSYS FLUENT User’s Guide; Ansys Inc.: Canonsburg, PA, USA, 2011. [Google Scholar]
- Tanner, R.I.; Milthorpe, J.F. Numerical simulation of the flow of fluids with yield stress. In Proceedings of the Third International Conference on Numerical Methods in Laminar and Turbulent Flow, Seattle, WA, USA, 8–11 August 1983; pp. 680–690. [Google Scholar]
- Mitsoulis, E. Flows of viscoplastic materials: Models and computations. Rheol. Rev. 2007, 2007, 135–178. [Google Scholar]
- Rudman, M.; Blackburn, H.M.; Graham, L.J.W.; Pullum, L. Turbulent pipe flow of shear-thinning fluids. J. Non-Newton. Fluid Mech. 2004, 118, 33–48. [Google Scholar] [CrossRef]
- Metzner, A.B.; Reed, J.C. Flow of non-Newtonian fluids—Correlation of the laminar, transition and turbulent-flow regions. AIChE J. 1955, 1, 434–440. [Google Scholar] [CrossRef]
- Businger, J.A.; Wyngaard, J.C.; Izumi, Y.; Bradley, E.F. Flux-Profile Relationships in the Atmospheric Surface Layer. J. Atmos. Sci. 1971, 28, 181–189. [Google Scholar] [CrossRef]
- Moeng, C.H. A large eddy simulation model for the study of planetary boundary-layer turbulence. J. Atmos. Sci. 1984, 41, 2052–2062. [Google Scholar] [CrossRef]
- Porté-Agel, F.; Meneveau, C.; Parlange, M.B. A scale-dependent dynamic model for large-eddy simulation: Application to a neutral atmospheric boundary layer. J. Fluid Mech. 2000, 415, 261–284. [Google Scholar] [CrossRef]
- Park, J.T.; Mannheimer, R.J.; Grimley, T.A.; Morrow, T.B. Pipe flow measurements of a transparent non-Newtonian slurry. J. Fluids Eng. 1989, 111, 331–336. [Google Scholar] [CrossRef]
- Thota Radhakrishnan, A.K.; van Lier, J.; Clemens, F.H.L.R. Available Upon Request, 2018; in press.
- Neill, R.I.G. The Rheology and Flow Behaviour of High Concentration Mineral Slurries. Master’s Thesis, University of Cape Town, Cape Town, South Africa, 1988. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | (kg/m3) | (Pa) | m (Pasn) | n | D (m) | Reference | |
|---|---|---|---|---|---|---|---|
| KERS2408 | 1061 | 1.04 | 0.0136 | 0.8031 | 0.079 | 380 | Slatter [13] |
| KERS0608 | 1071 | 1.88 | 0.0102 | 0.8428 | 0.079 | 380 | Slatter [13] |
| PARK1 | 1012 | 9.30 | 0.0894 | 0.7254 | 0.051 | 590 | Park et al. [48] |
| S17 | 1113 | 0.16 | 0.0328 | 0.6043 | 0.100 | 450 | Thota Radhakrishnan et al. [49] |
| S21 | 1146 | 0.43 | 0.0831 | 0.5207 | 0.100 | 450 | Thota Radhakrishnan et al. [49] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mehta, D.; Thota Radhakrishnan, A.K.; Van Lier, J.; Clemens, F. A Wall Boundary Condition for the Simulation of a Turbulent Non-Newtonian Domestic Slurry in Pipes. Water 2018, 10, 124. https://doi.org/10.3390/w10020124
Mehta D, Thota Radhakrishnan AK, Van Lier J, Clemens F. A Wall Boundary Condition for the Simulation of a Turbulent Non-Newtonian Domestic Slurry in Pipes. Water. 2018; 10(2):124. https://doi.org/10.3390/w10020124
Chicago/Turabian StyleMehta, Dhruv, Adithya Krishnan Thota Radhakrishnan, Jules Van Lier, and Francois Clemens. 2018. "A Wall Boundary Condition for the Simulation of a Turbulent Non-Newtonian Domestic Slurry in Pipes" Water 10, no. 2: 124. https://doi.org/10.3390/w10020124
APA StyleMehta, D., Thota Radhakrishnan, A. K., Van Lier, J., & Clemens, F. (2018). A Wall Boundary Condition for the Simulation of a Turbulent Non-Newtonian Domestic Slurry in Pipes. Water, 10(2), 124. https://doi.org/10.3390/w10020124