Impact of Uncertainty of Floodplain Digital Terrain Model on 1D Hydrodynamic Flow Calculation


Abstract
:1. Introduction
2. Materials and Methods
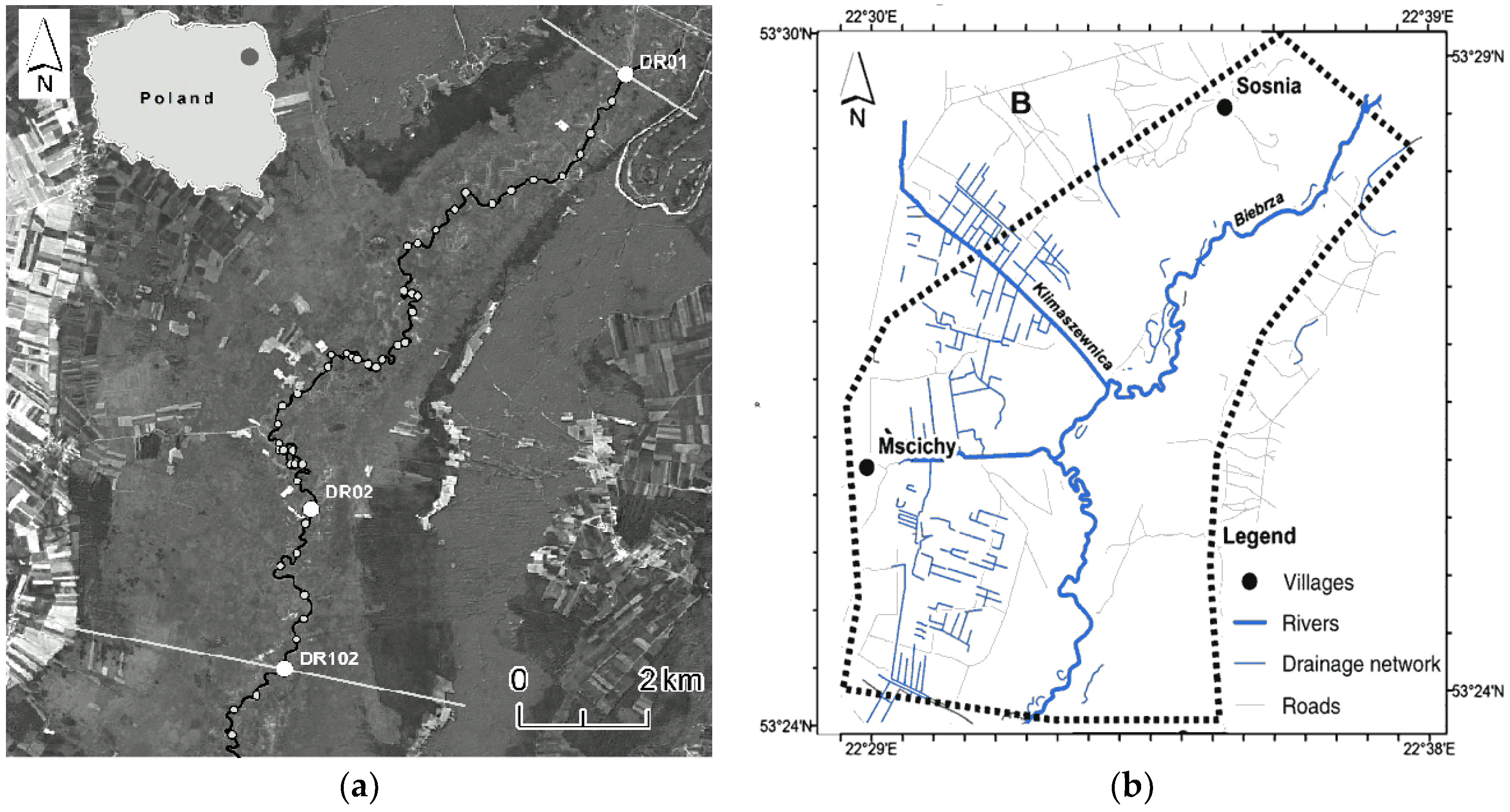
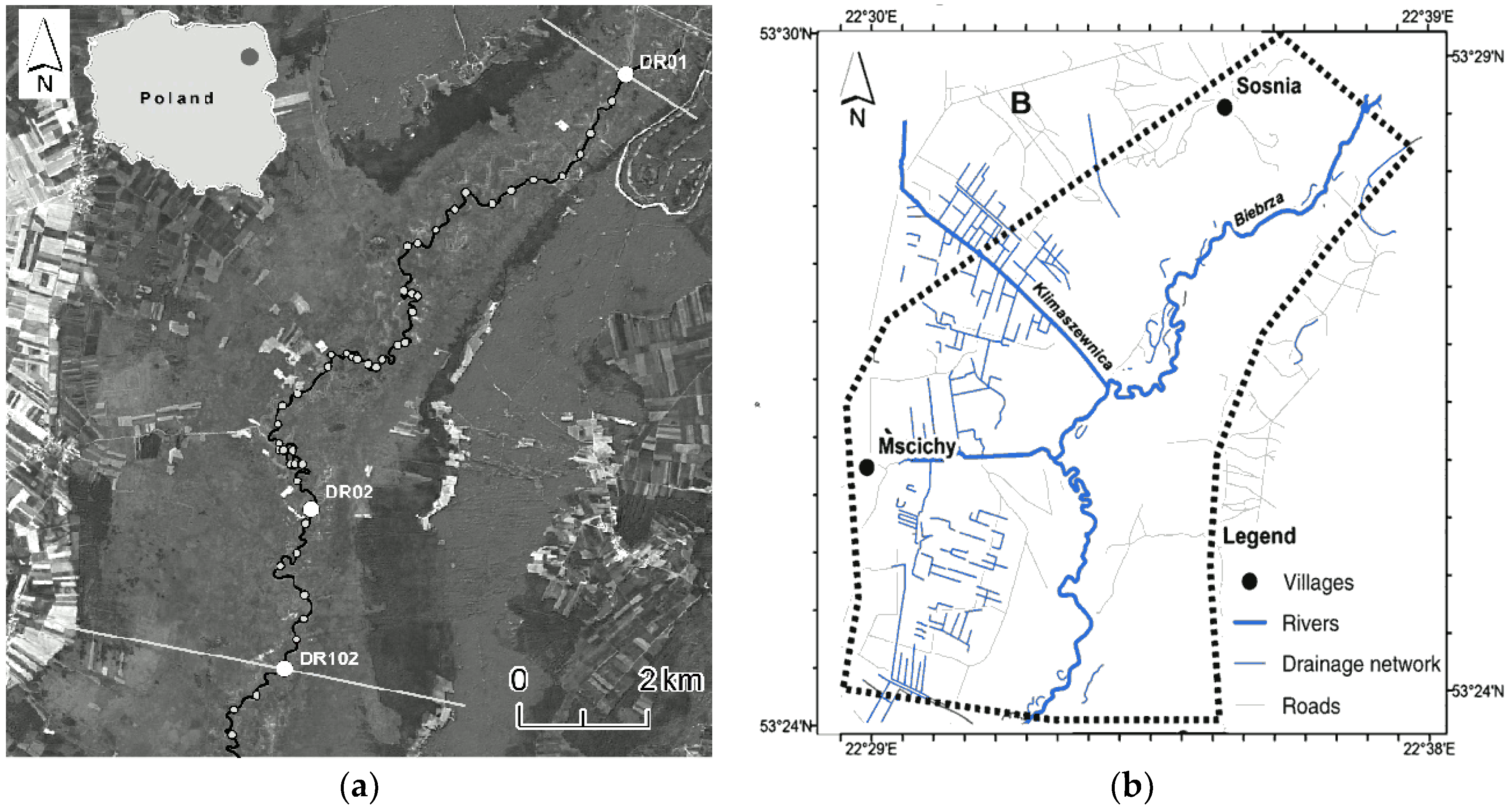
2.1. Study Area
2.2. Digital Terrain Model (DTM)
2.3. 1D Hydrodynamic River and Floodplain Flow Model
2.4. Sampling the DTM Uncertainty
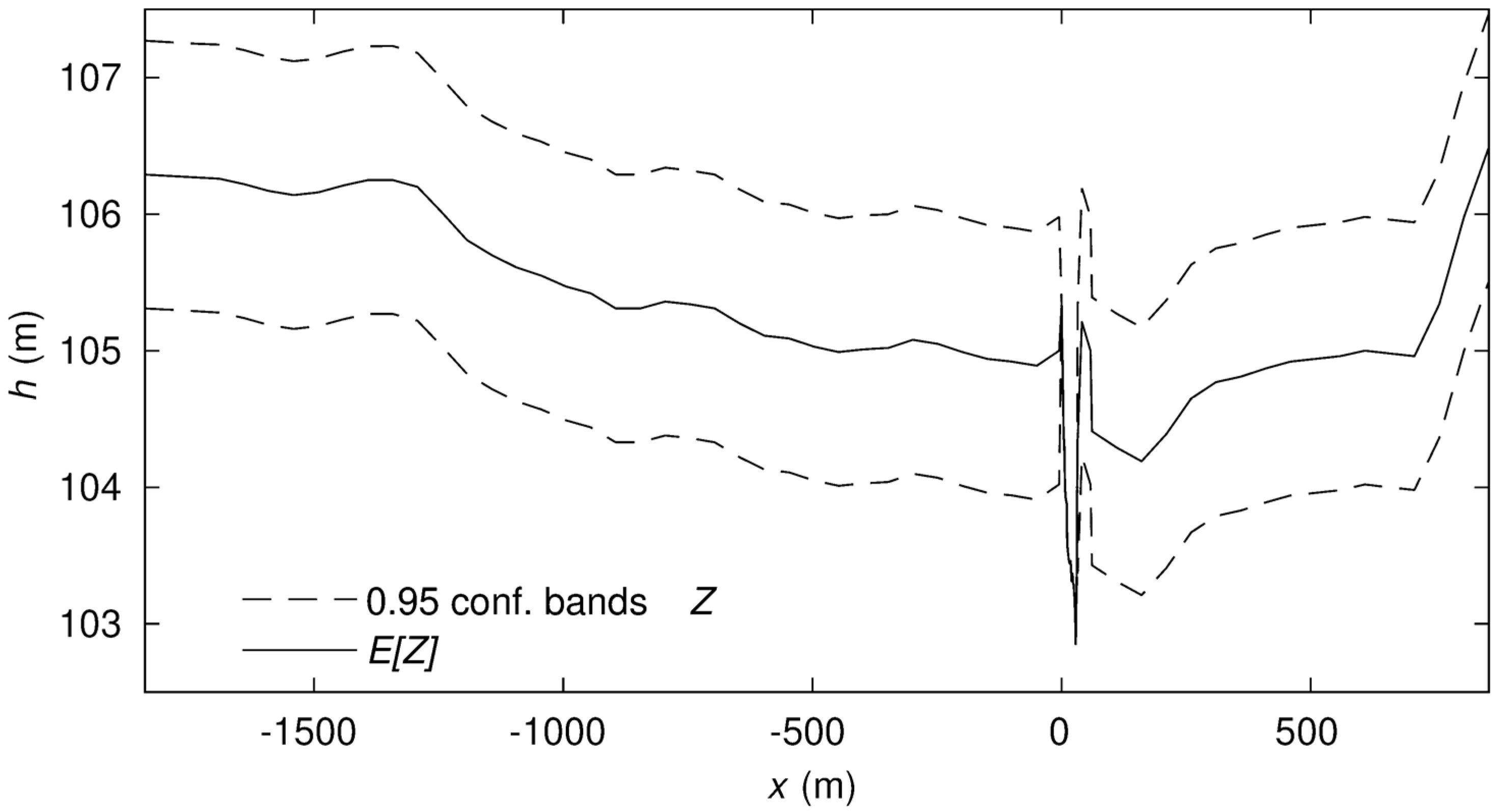
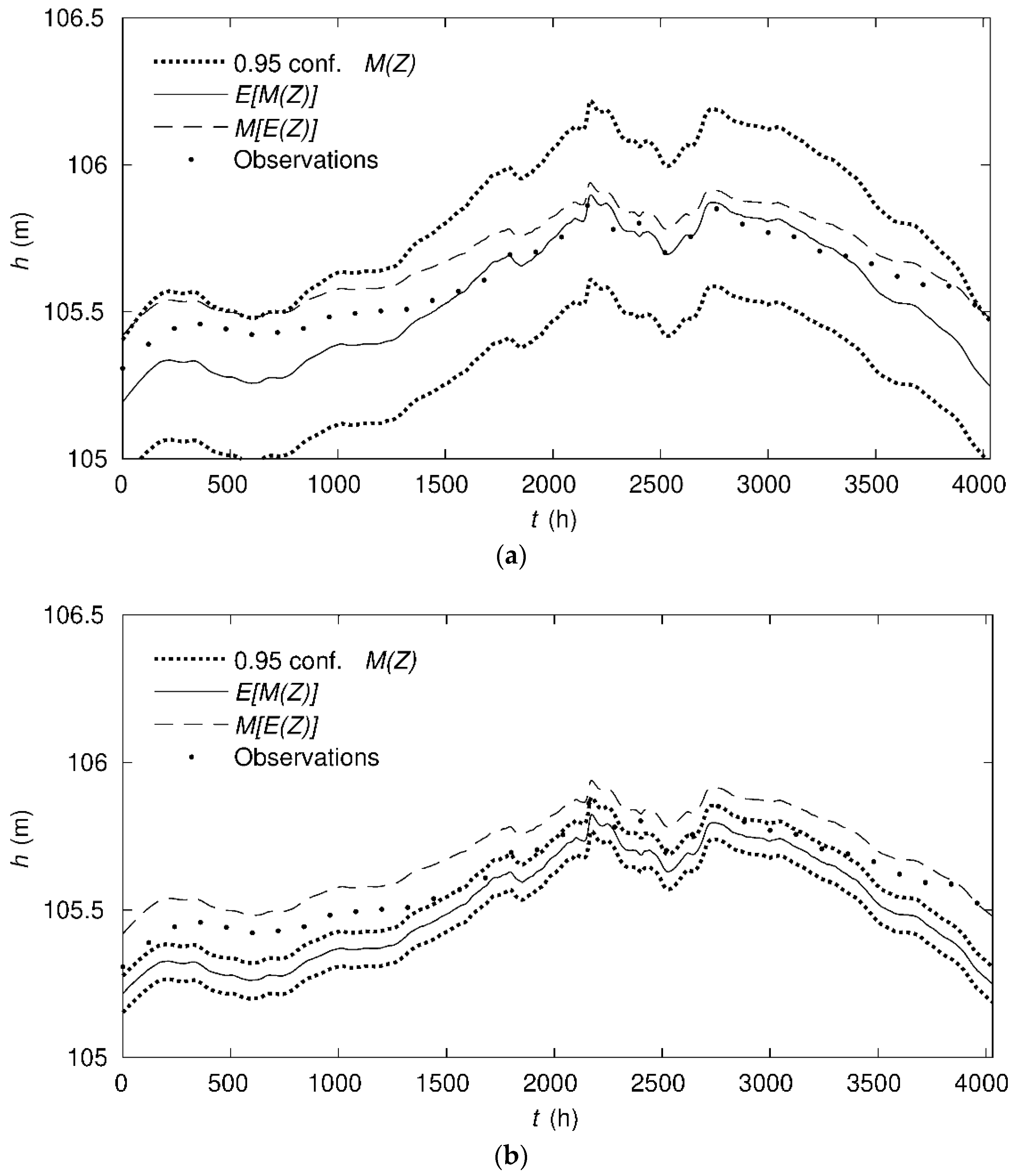
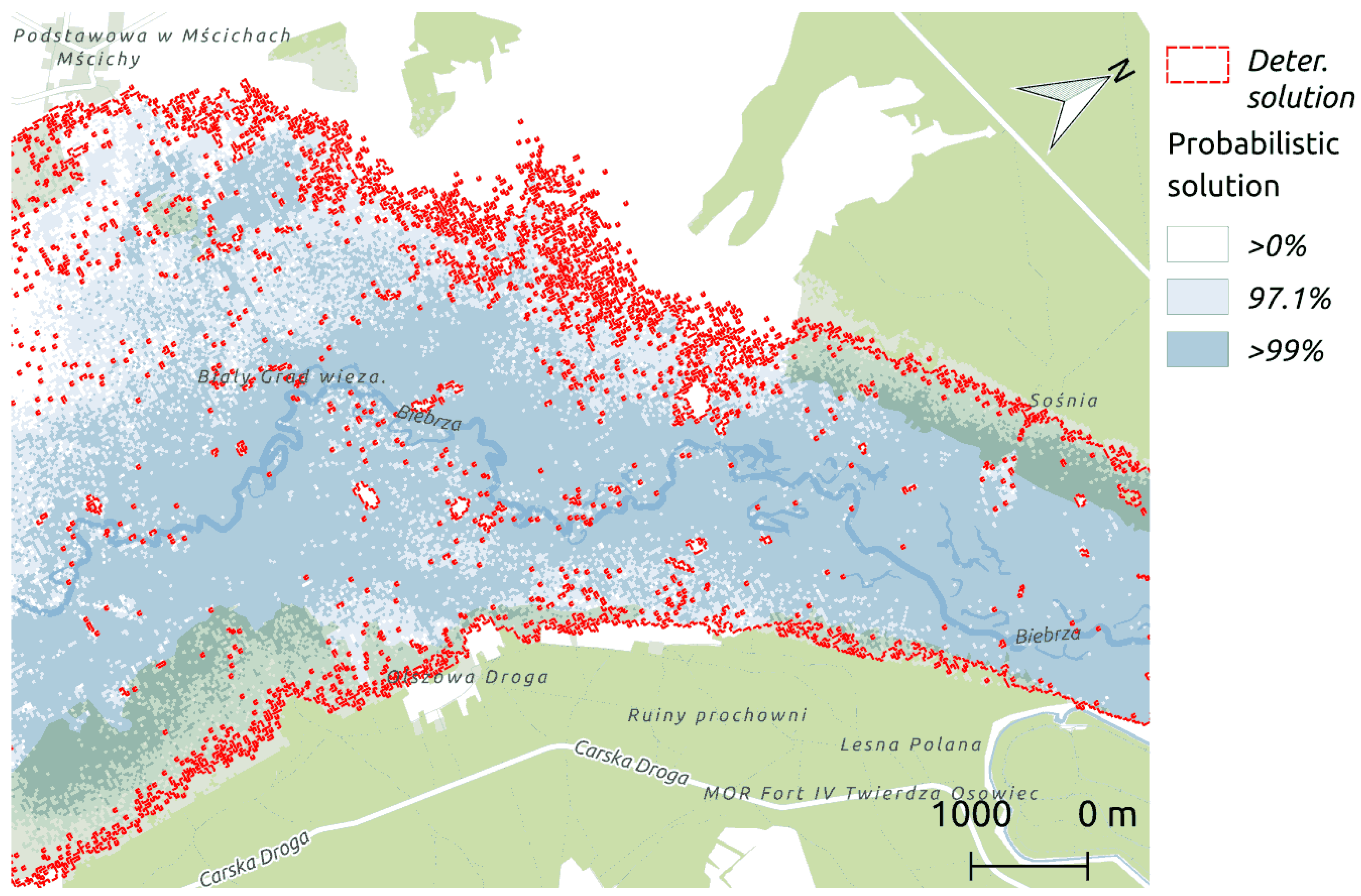
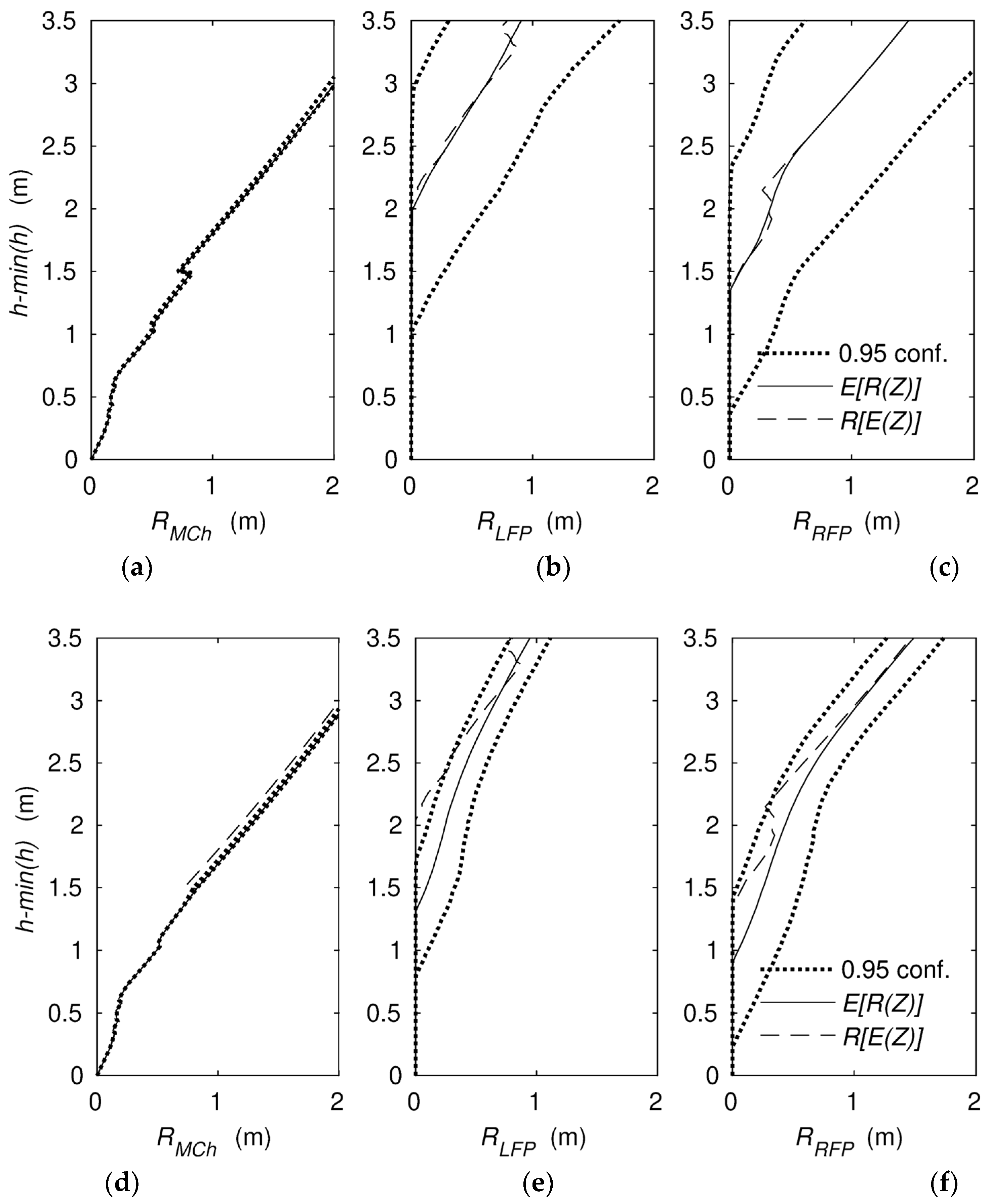
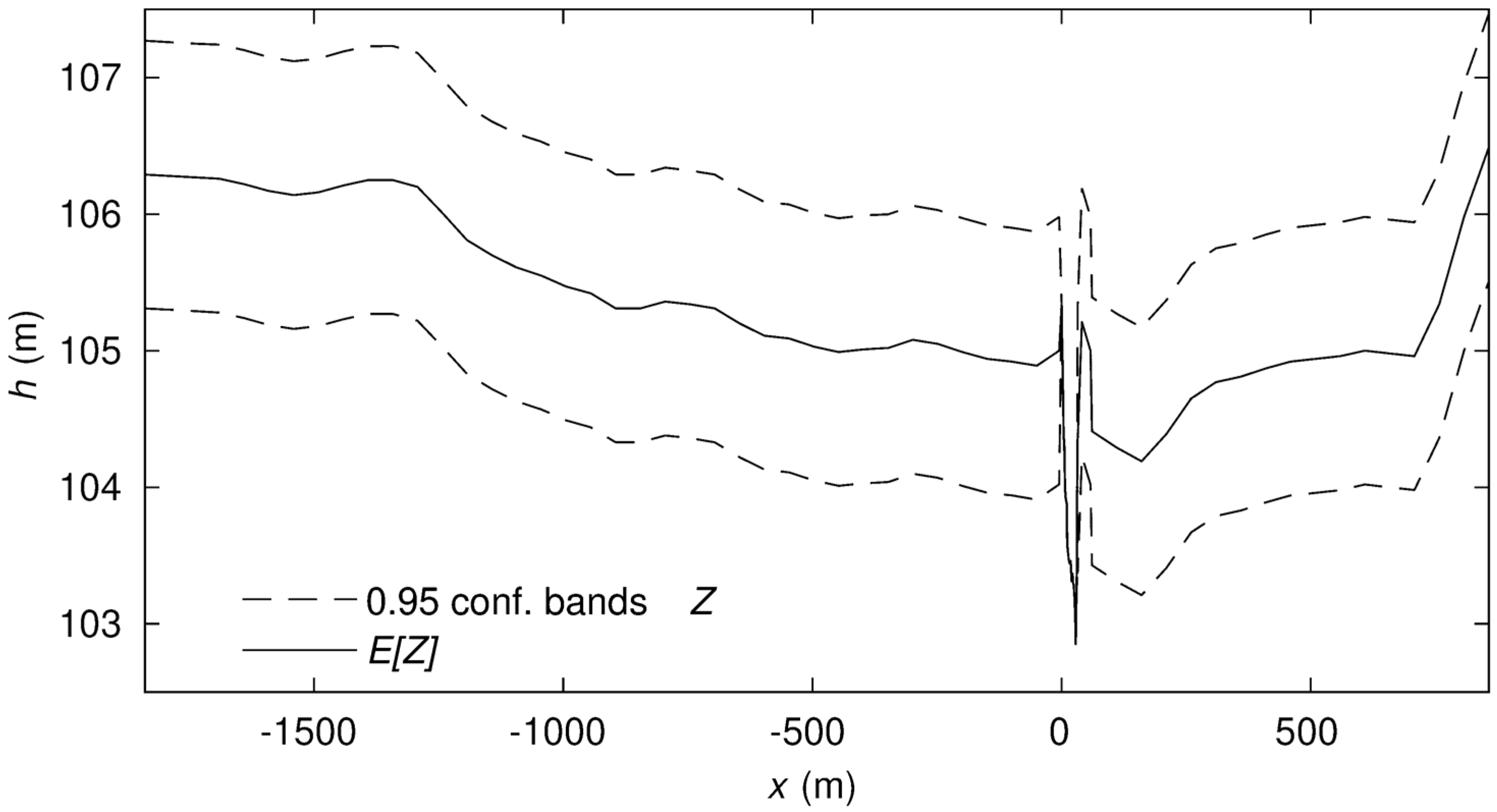
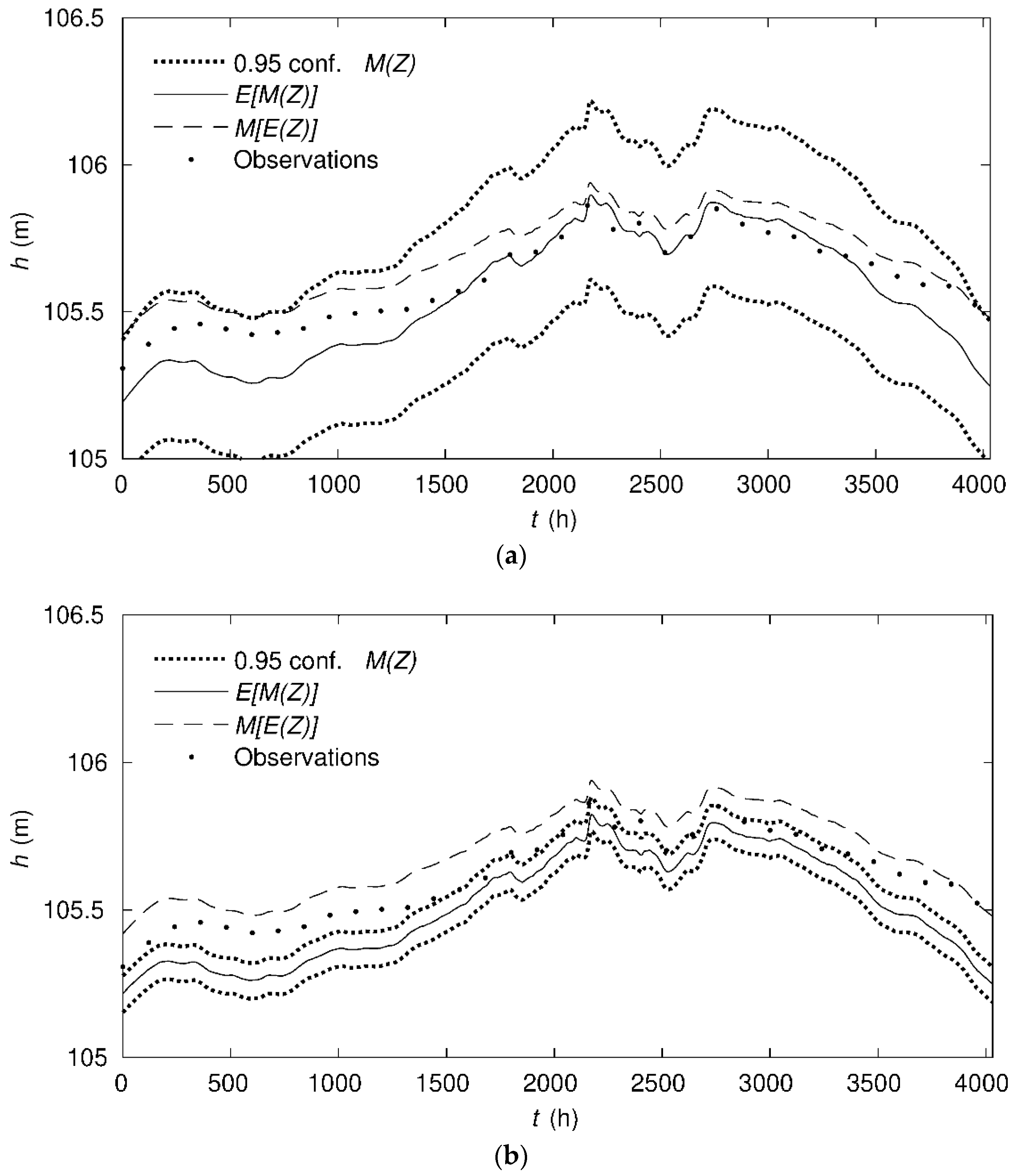
3. Results
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Gharbi, M.; Soualmia, A.; Dartus, D.; Masbernat, L. Comparison of 1D and 2D hydraulic models for floods simulation on the medjerda riverin tunisia. J. Mater. Environ. Sci. 2016, 7, 3017–3026. [Google Scholar]
- Grygoruk, M.; Bańkowska, A.; Jabłońska, E.; Janauer, G.A.; Kubrak, J.; Mirosław-Światek, D.; Kotowski, W. Assessing habitat exposure to eutrophication in restored wetlands: Model-supported ex-ante approach to rewetting drained mires. J. Environ. Manag. 2015, 152, 230–240. [Google Scholar] [CrossRef] [PubMed]
- Świątek, D.; Szporak, S.; Chormański, J.; Okruszko, T. Hydrodynamic model of the lower biebrza river flow a tool for assessing the hydrologic vulnerability of a floodplain to management practices. Ecohydrol. Hydrobiol. 2008, 8, 331–337. [Google Scholar] [CrossRef]
- Marcinkowski, P.; Kiczko, A.; Okruszko, T. Model-based analysis of macrophytes role in the flow distribution in the anastomosing river system. Water 2018, 10, 953. [Google Scholar] [CrossRef]
- Brandyk, A.; Majewski, G.; Kiczko, A.; Boczoń, A.; Wróbel, M.; Porretta-Tomaszewska, P. Ground water levels of a developing wetland—Implications for water management goals. In Environmental Engineering V, Proceedings of the 5th National Congress of Environmental Engineering, Lublin, Poland, 29 May–1 June 2016; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Li, Z.; Zhu, C.; Gold, C. Digital Terrain Modeling: Principles and Methodology; CRC press: Boca Raton, FL, USA, 2004; ISBN 9780203486740. [Google Scholar]
- Sanders, B.F. Evaluation of on-line DEMs for flood inundation modeling. Adv. Water Resour. 2007, 30, 1831–1843. [Google Scholar] [CrossRef]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.W.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Mirosław-Świątek, D.; Kiczko, A.; Szporak-Wasilewska, S.; Grygoruk, M. Too wet and too dry? Uncertainty of DEM as a potential source of significant errors in a model-based water level assessment in riparian and mire ecosystems. Wetl. Ecol. Manag. 2017, 25, 547–562. [Google Scholar] [CrossRef] [Green Version]
- Walczak, Z.; Sojka, M.; Wrózyński, R.; Laks, I. Estimation of polder retention capacity based on ASTER, SRTM and LIDAR DEMs: The case of Majdany Polder (West Poland). Water 2016, 8, 230. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E.; Carson, W.W. Accuracy of a high-resolution LIDAR terrain model under a conifer forest canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar] [CrossRef]
- Sofia, G.; Pirotti, F.; Tarolli, P. Variations in multiscale curvature distribution and signatures of LIDAR DTM errors. Earth Surf. Process. Landf. 2013, 38, 1116–1134. [Google Scholar] [CrossRef]
- Liu, X.; Hu, P.; Hu, H.; Sherba, J. Approximation theory applied to DEM vertical accuracy assessment. Trans. GIS 2012, 16, 397–410. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Jensen, J.R.; Schmidt, L.; Schill, S.; Davis, B. An evaluation of LIDAR-and IFSAR-derived digital elevation models in leaf-on conditions with USGS Level 1 and Level 2 DEMs. Remote Sens. Environ. 2003, 84, 295–308. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, P. Accuracy of airborne LIDAR-derived elevation. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Raber, G.T.; Jensen, J.R.; Hodgson, M.E.; Tullis, J.A.; Davis, B.A.; Berglund, J. Impact of LIDAR nominal post-spacing on DEM accuracy and flood zone delineation. Photogramm. Eng. Remote Sens. 2007, 73, 793–804. [Google Scholar] [CrossRef]
- Oksanen, J.; Sarjakoski, T. Uncovering the statistical and spatial characteristics of fine toposcale DEM error. Int. J. Geogr. Inf. Sci. 2006, 20, 345–369. [Google Scholar] [CrossRef]
- Guo, Q.; Li, W.; Yu, H.; Alvarez, O. Effects of topographic variability and lidar sampling density on several DEM interpolation methods. Photogramm. Eng. Remote Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef]
- Aguilar, F.J.; Mills, J.P.; Delgado, J.; Aguilar, M.A.; Negreiros, J.G.; Pérez, J.L. Modelling vertical error in LiDAR-derived digital elevation models. ISPRS J. Photogramm. Remote Sens. 2010, 65, 103–110. [Google Scholar] [CrossRef]
- Merwade, V.; Olivera, F.; Arabi, M.; Edleman, S. Uncertainty in flood inundation mapping: Current issues and future directions. J. Hydrol. Eng. 2008, 13, 608–620. [Google Scholar] [CrossRef]
- Papaioannou, G.; Loukas, A.; Vasiliades, L.; Aronica, G.T. Flood inundation mapping sensitivity to riverine spatial resolution and modelling approach. Nat. Hazards 2016, 83, 117–132. [Google Scholar] [CrossRef]
- Papaioannou, G.; Vasiliades, L.; Loukas, A.; Aronica, G.T. Probabilistic flood inundation mapping at ungauged streams due to roughness coefficient uncertainty in hydraulic modelling. Adv. Geosci. 2017, 44, 23–34. [Google Scholar] [CrossRef] [Green Version]
- Laks, I.; Sojka, M.; Walczak, Z.; Wróżyński, R. Possibilities of using low quality digital elevation models of floodplains in hydraulic numerical models. Water 2017, 9, 283. [Google Scholar] [CrossRef]
- Yan, K.; Di Baldassarre, G.; Solomatine, D.P. Exploring the potential of SRTM topographic data for flood inundation modelling under uncertainty. J. Hydroinform. 2013, 15, 849–861. [Google Scholar] [CrossRef]
- Podhoranyi, M.; Fedorcak, D. Inaccuracy introduced by LIDAR-generated cross sections and its impact on 1D hydrodynamic simulations. Environ. Earth Sci. 2015, 73, 1–11. [Google Scholar] [CrossRef]
- Jung, Y.; Merwade, V. Uncertainty quantification in flood inundation mapping using generalized likelihood uncertainty estimate and sensitivity analysis. J. Hydrol. Eng. 2012, 17, 507–520. [Google Scholar] [CrossRef]
- Tsubaki, R.; Kawahara, Y. The uncertainty of local flow parameters during inundation flow over complex topographies with elevation errors. J. Hydrol. 2013, 486, 71–87. [Google Scholar] [CrossRef]
- Abily, M.; Bertrand, N.; Delestre, O.; Gourbesville, P.; Duluc, C.M. Spatial global sensitivity analysis of high resolution classified topographic data use in 2D urban flood modelling. Environ. Model. Softw. 2016, 77, 183–195. [Google Scholar] [CrossRef] [Green Version]
- Knighton, J. Estimating the effects of DEM uncertainty through two-dimensional spatial stochastic watershed simulation. In Proceedings of the World Environmental and Water Resources Congress 2015, Austin, TX, USA, 17–21 May 2015; pp. 1489–1499. [Google Scholar]
- Heuvelink, G.B.M. Error Propagation in Environmental Modelling with GIS; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Oksanen, J.; Sarjakoski, T. Error propagation of DEM-based surface derivatives. Comput. Geosci. 2005, 31, 1015–1027. [Google Scholar] [CrossRef]
- Wechsler, S.P. Uncertainties associated with digital elevation models for hydrologic applications: A review. Hydrol. Earth Syst. Sci. 2007, 11, 1481–1500. [Google Scholar] [CrossRef]
- Hengl, T.; Heuvelink, G.B.M.; Van Loon, E.E. On the uncertainty of stream networks derived from elevation data: The error propagation approach. Hydrol. Earth Syst. Sci. 2010, 14, 1153–1165. [Google Scholar] [CrossRef]
- Oksanen, J. Digital Elevation Model Error in Terrain Analysis. Ph.D. Thesis, University of Helsinki, Helsinki, Finland, 2006. [Google Scholar]
- Lewis, A.; Hutchinson, M.F. From Data Accuracy to Data Quality: Using Spatial Statistics to Predict the Implications of Spatial Error in Point Data; Ann Arbor Press: Chelsea, MI, USA, 2000. [Google Scholar]
- Kozioł, A.P.; Kubrak, J. Measurements of turbulence structure in a compound channel. In Rivers—Physical, Fluvial and Environmental Processes; Springer: Berlin, Germany, 2015; pp. 229–254. [Google Scholar]
- Romanowicz, R.J.J.; Kiczko, A. An event simulation approach to the assessment of flood level frequencies: Risk maps for the Warsaw reach of the River Vistula. Hydrol. Process. 2016, 30, 2451–2462. [Google Scholar] [CrossRef]
- Kiczko, A.; Romanowicz, R.J.; Osuch, M.; Karamuz, E. Maximising the usefulness of flood risk assessment for the river Vistula in Warsaw. Nat. Hazards Earth Syst. Sci. 2013, 13, 3443–3455. [Google Scholar] [CrossRef]
- Wassen, M.J.; Okruszko, T.; Kardel, I.; Chormański, J.; Światek, D.; Mioduszewski, W.; Bleuten, W.; Querner, E.P.; El Kahloun, M.; Batelaan, O.; et al. Eco-hydrological functioning of the Biebrza wetlands: Lessons for the conservation and restoration of deteriorated wetlands. In Wetlands: Functioning, Biodiversity Conservation, and Restoration; Springer: Berlin, Germany, 2006; pp. 285–310. [Google Scholar]
- Grygoruk, M.; Batelaan, O.; Okruszko, T.; Mirosław-Świątek, D.; Chormański, J.; Rycharski, M. Groundwater modelling and hydrological system analysis of wetlands in the Middle Biebrza Basin. In Modelling of Hydrological Processes in the Narew Catchment; Springer: Berlin, Germany, 2011; pp. 89–109. [Google Scholar]
- Banaszuk, H. Ogolna charakterystyka Kotliny Biebrzańskiej i Biebrzańskiego Parku Narodowego [General characteristics of the Biebrza Valley and the Biebrza National Park]. In Kotlina Biebrzańska i Biebrzański Park Narodowy. Aktualny stan, walory, zagrożenia i potrzeby czynnej ochrony środowiska. Monografia przyrodnicza [The Biebrza Valley and the Biebrza National Park. Current State, Natural Values, Threats and Needs]; Wyd. Ekonomia i Środowisko: Białystok, Poland, 2004; pp. 19–25. [Google Scholar]
- Kossowska-Cezak, U. Climate of the Biebrza ice-margin Halley. Pol. Ecol. Stud. 1984, 10, 253–270. [Google Scholar]
- Oświt, J. Roślinność i Siedliska Zabagnionych Dolin Rzecznych na tle Warunków Wodnych. [Vegetation and Wetland Habitats against the Background of Water Conditions]; Wydawnictwo Naukowe PWN: Warsaw, Poland, 1991; ISBN 83-01-10396-5. [Google Scholar]
- Maciorowski, G.; Mirski Pawełand Kardel, I.; Stelmaszczyk, M.; Mirosław-Swiatek, D.; Chormański, J.; Okruszko, T. Water regime as a key factor differentiating habitats of spotted eagles Aquila clanga and Aquila pomarina in Biebrza Valley (NE Poland). Bird Study 2015, 62, 120–125. [Google Scholar] [CrossRef]
- Chormański, J.; Mirosław-Świaątek, D.; Michałowski, R. A hydrodynamic model coupled with GIS for flood characteristics analysis in the Biebrza riparian wetland. Oceanol. Hydrobiol. Stud. 2009, 38, 65–73. [Google Scholar] [CrossRef]
- Mirosław-Świątek, D.; Szporak-Wasilewska, S.; Michałowski, R.; Kardel, I.; Grygoruk, M. Developing an algorithm for enhancement of a digital terrain model for a densely vegetated floodplain wetland. J. Appl. Remote Sens. 2016, 10. [Google Scholar] [CrossRef]
- Gorte, B.; Pfeifer, N.; Elberink, S.O. Height texture of low vegetation in airborne laser scanner data and its potential for DTM correction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, 150–155. [Google Scholar]
- Miroslaw-Swiatek, D.; Grygoruk, M. Influence of equivalent flow path approximation in 1D model in meandering rivers with floodplain on flood routing. In Proceedings of the 15th International Multidisciplinary Scientific GeoConference SGEM 2015, Albena, Bulgaria, 18–24 June 2015; pp. 379–386. [Google Scholar]
- Ponce, V.M.; Simons, D.B.; Li, R.-M. Applicability of kinematic and diffusion models. J. Hydraul. Div. 1978, 104, 353–360. [Google Scholar]
- Weinmann, B.P.E.; Laurenson, E.M. Approximate Flood Routing Methods: A Review. J. Hydraul. Div. 1979, 105, 1521–1536. [Google Scholar]
- Kazezyılmaz-Alhan, C.M. An improved solution for diffusion waves to overland flow. Appl. Math. Model. 2012, 36, 4165–4172. [Google Scholar] [CrossRef]
- Mirosław-Świątek, D. Application of Newtonian nudging data assimilation method in hydrodynamic model of flood flow in the Lower Biebrza Basin. Stud. Geotech. Mech. 2012, 34, 91–105. [Google Scholar] [CrossRef]
- Pe’eri, S.; Philpot, W. Increasing the existence of very shallow-water LIDAR measurements using the red-channel waveforms. IEEE Trans. Geosci. Remote Sens. 2007. [Google Scholar] [CrossRef]
- Bjørnstad, O.N.; Falck, W. Nonparametric spatial covariance functions: Estimation and testing. Environ. Ecol. Stat. 2001, 8, 53–70. [Google Scholar] [CrossRef]
- Kiczko, A.; Szelag, B.; Koziol, A.P.; Krukowski, M.; Kubrak, E.; Kubrak, J.; Romanowicz, R.J. Optimal capacity of a stormwater reservoir for flood peak reduction. J. Hydrol. Eng. 2018, 23. [Google Scholar] [CrossRef]
- Brandyk, A.; Kiczko, A.; Majewski, G.; Kleniewska, M.; Krukowski, M. Uncertainty of Deardorff’s soil moisture model based on continuous TDR measurements for sandy loam soil. J. Hydrol. Hydromech. 2016, 64, 23–29. [Google Scholar] [CrossRef] [Green Version]
- Szelag, B.; Kiczko, A.; Dabek, L. Sensitivity and uncertainty analysis of hydrodynamic model (SWMM) for storm water runoff forecasting in an urban basin—A case study. Ochrona Srodowiska 2016, 38, 15–22. [Google Scholar]
- D’Errico, J. SLM Shape Language Modeling; MathWorks: Natick, MA, USA, 2016. [Google Scholar]
- OpenStreetMap. Available online: www.openstreetmap.org (accessed on 18 August 2018).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Sensor | Model |
|---|---|---|
| MSE (m) | 0.05 | |
| σ (m) | 0.02 | |
| R | 0.971 | |
| hmax (m) | 105.88 | 105.89 |
| hmin (m) | 105.30 | 105.22 |
| dh = hmax − hmin (m) | 0.67 | 0.58 |
| Variable | Bankfull Flows | Maximum Flows | ||||
|---|---|---|---|---|---|---|
| Corr. DTM Unc. | Uncorr. DTM Unc. | Determ. Solution | Corr. DTM Unc. | Uncorr. DTM Unc. | Determ. Solution | |
| A2.5% (106 m2) | 1.83 | 2.90 | 7.75 | 22.33 | 23.38 | 25.28 |
| E[A] (106 m2) | 3.12 | 3.81 | 24.33 | 23.75 | ||
| A97.5% (106 m2) | 4.70 | 4.75 | 25.62 | 24.12 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiczko, A.; Mirosław-Świątek, D. Impact of Uncertainty of Floodplain Digital Terrain Model on 1D Hydrodynamic Flow Calculation. Water 2018, 10, 1308. https://doi.org/10.3390/w10101308
Kiczko A, Mirosław-Świątek D. Impact of Uncertainty of Floodplain Digital Terrain Model on 1D Hydrodynamic Flow Calculation. Water. 2018; 10(10):1308. https://doi.org/10.3390/w10101308
Chicago/Turabian StyleKiczko, Adam, and Dorota Mirosław-Świątek. 2018. "Impact of Uncertainty of Floodplain Digital Terrain Model on 1D Hydrodynamic Flow Calculation" Water 10, no. 10: 1308. https://doi.org/10.3390/w10101308
APA StyleKiczko, A., & Mirosław-Świątek, D. (2018). Impact of Uncertainty of Floodplain Digital Terrain Model on 1D Hydrodynamic Flow Calculation. Water, 10(10), 1308. https://doi.org/10.3390/w10101308