1. Introduction
Satellite observations play a very important role in improving the accuracy of mesoscale weather forecasts [
1]. At present, most assimilation studies for satellite data adopt a variational method. The four-dimensional variational (4DVar) method uses a model as a constraint to assimilate observations at multiple times in the assimilation window. Bias corrections are easy to implement by using the variational framework, so many operational numerical weather forecasting centers adopt the 4DVar method for satellite data assimilation [
2]. However, the adjoint model solution of 4DVar requires a lot of computational resources, which limits its development. At the same time, the ensemble Kalman filter (EnKF) based ensemble assimilation method can construct flow-dependent background error covariance without requiring the solution of the tangent linear adjoint model [
3,
4,
5]. As a result, methods of ensemble assimilation for satellite data have been developed, such as ensemble square-root filtering [
6,
7], ensemble transform Kalman filtering, and local ensemble transform Kalman filtering [
8,
9]. However, the limited number of ensemble members for the ensemble assimilation method can cause large sample errors, so both 4DVar and EnKF assimilation methods have their own advantages and disadvantages. In order to avoid the shortcomings of 4DVar and EnKF, a four-dimensional ensemble hybrid assimilation method (4DEnVar) is proposed [
10]. Qiu et al. proposed using the singular value decomposition (SVD) method in order to construct the base vector of analyzing increments [
11]. The cost function is transformed into an explicit expression on control variables and there is no need to solve the adjoint and tangent linear model. Liu et al. proposed a 4DEnVar assimilation method using ensemble perturbations directly as a basis vector [
12,
13,
14]. Wang et al. developed a 4DVar assimilation method (DRP-4DVar) while using dimension-reduced projection [
15]. This method performs EOF decomposition on ensemble perturbations and it reduces the dimensionality by selecting EOF modes. Good experimental results have been obtained in Lorenz96 mode, Observing System Simulation Experiments (OSSEs), and assimilation experiments for real observations [
16,
17,
18].
Tian et al. proposed a variational four-dimensional ensemble assimilation method, based on Proper Orthogonal Decomposition (POD) [
19]. Similar to Liu et al.’s method [
12], the method combines variational assimilation and an ensemble Kalman filter that not only makes the background error covariance flow-dependent, but also avoids the problem of solving the adjoint and tangent linear model of 4DVar. Testing on the Lorenz system, the shallow water wave equation and the global chemical transport model Geos-Chem show that this method has great potential for applications [
19,
20,
21]. It is found that the PODEn4DVar outperforms both the 4DVar and the EnKF under both perfect and imperfect-model scenarios with lower computational costs than the EnKF [
19]. At present, the Proper Orthogonal Decomposition (POD)-based ensemble three-dimensional variational (3DVar) assimilation method (referred to as POD-3DEnVar) and POD-4DEnVar assimilation systems that are based on radar data have been developed successfully [
22,
23]. Assimilation experiments show that the systems can effectively improve the description of dynamic and microphysical characteristics for the initial convective field, and thus effectively increase the capability for precipitation forecast. At present, most of the data assimilated by the POD-4DEnVar method are radar data, and there has been no previous study of an application of this method to assimilate satellite data, specifically the Chinese FY-satellite data. The wide coverage and high spatial resolution of satellite data mean that they are widely used in numerical weather forecasting. Satellite data, especially microwave sensor data, can effectively improve the initial field of numerical forecasts. The successful launch of the Chinese polar orbiting meteorological satellite FY-3A on 27 May 2008 with its Microwave Humidity Sounder (MWHS) and Microwave Temperature Sounder (MWTS) have provided the vertical profiles of atmospheric temperature and humidity that are important for numerical weather forecasting. It provides an important source of vertical atmospheric satellite sounding data for use in regional and global assimilation systems [
24]. Therefore, the assimilation and application of FY-satellite data has attracted much attention. The assimilation of FY-satellite data into the WRF model with the advanced POD-4DEnVar method could improve the accuracy of the numerical forecast.
As the first attempt to assimilate FY-3A MWHS and MWTS with the POD-4DEnVar assimilation method, the community radiative transfer model (CRTM) is used here as an observational operator for the satellite data. Using initial and physical ensemble forecasting samples to construct ensemble perturbations [
25,
26,
27], single observation experiments and observation system simulation experiments are carried out for a large-scale precipitation event over the middle and the lower reaches of the Yangtze River.
The article is organized as follows. The second section briefly introduces the theoretical framework of POD-4DEnVar. In the third section, the key technologies of POD-4DEnVar in satellite data assimilation are analyzed and the POD-4DEnVar Satellite Assimilation System is established. The fourth section describes rainstorm cases and model parameter settings. The results of single observation experiments, OSSEs are analyzed in the fourth section. The fifth section analyzes the results of sensitivity experiments for the percentage of truncated eigenvalue, the number of ensemble members, the length of assimilation time window, and the horizontal localization scale in the system. The robustness of POD-4DEnVar Satellite Assimilation System and the optimal settings of the relevant sensitivity parameters are tested. The sixth section provides a summary.
2. Introduction to the POD-4DEnVar Method
The following is a brief introduction to the mathematical framework of POD-4DEnVar. For a detailed derivation, see the article by Tian et al. [
19]. The cost function of the incremental form for 4DVar is:
In Formula (1),
indicates the observation times in the assimilation time window,
indicates the total number of observational times in the assimilation window. Superscript
indicates the transpose of a matrix, and
and
are the inverses of the background and observation error covariance matrices at time
, respectively.
is the analysis increment at
,
is the observed increment at time
,
is the observed innovation at time
, and the specific expressions for each item are:
Here, represents the observation operator at time in the above formula, indicates that the forecast model integrates from initial time to observation time and represents the observation at time , is the background field.
POD-4DEnVar solves the cost function (1) without solving the adjoint and the tangent linear model. The specific approach is as follows.
First, ensemble members are given at time . The ensemble members can reflect the uncertainty of initial field at time . ensemble forecasting members can generate ensemble forecast perturbations to the background field , where . We call it the model perturbations (MPs) matrix, which is defined as the . By mapping ensemble forecasting perturbations into observation space through the observation operator , observation perturbations can be generated. Over the observation times in the assimilation time window, observation perturbations can be generated that define the observation perturbations (OPs) matrix .
After using the ensemble members to form the MPs matrix, it is assumed that analysis increment
can be approximately linearly related to the model perturbations, and then
can be expressed as the linear weighted sum of ensemble perturbations in
space, namely:
where
are the linear combination coefficients. Writing:
then:
Replacing the (8) formula into the cost function of (1) form, the solution to the incremental is transformed to the solution of the linear combination coefficient . Because the dimension of the linear combination coefficient is much smaller than the dimension of the increment , the amount of calculation is greatly reduced.
In order to make ensemble members have better independent representation. Since the dimension of the observed variable space is much smaller than the dimension of model space [
15], the POD decomposition is performed on the OPs matrix
[
28,
29]:
where
and
are the decomposed eigenvalues and eigenvectors, respectively.
is an orthogonal matrix. The eigenvectors are used as the basis function to transform the OPs matrix. They are usually truncated when transforming the OPs matrix. The first
eigenvalues
that represent the main features of the OPs matrix are selected from
.
We define the POD-transformed OPs matrix:
Here,
are the eigenvectors corresponding to the eigenvalues after the truncation.
is the OPs matrix after transformation, and
is independent of each other. From (2) to (4), it can be seen that the OPs originate from the MPs. Therefore, after the transformation of the OPs matrix
, the MPs matrix
should also be transformed accordingly. If we assume that there is a linear relationship between the MPs matrix
and the OPs matrix
, we can transform the model forecast increment
, as follows:
where
is the transformed independent MPs matrix.
The optimal solution
and its corresponding model equivalent
in observation space can be expressed by the linear combinations of the POD-transformed MPs and OPs, respectively, as follows:
and
Substituting (12), (13), and the ensemble background covariance
into (1), the control variable becomes
instead of
, so the control variable is expressed explicitly in the cost function:
Through simple calculations (see Tian et al. [
19] for more details), the explicit expression for the analysis increment is:
As an ensemble-based assimilation scheme, the localisation strategy is essential to ameliorate the spurious long-range correlations resulting from the limited number of ensemble members [
30]. In the POD-4DEnVar method, we use the following filter function as the horizontal correlation model [
31]:
In Formula (16),
represents the horizontal localization coefficient.
and
are the zonal and meridional distances between the observation point and model grid point, respectively.
and
are the zonal and meridional localization radius, respectively.
is the localization correlation function, which is related to the distance between the model point and the observation point. Following Zhang et al. [
32], vertical localization is performed using the correlation function,
in which
is the distance between two vertical levels in
space, and
is air pressure.
With the horizontal and vertical localization scheme, the final POD-4DEnVar analysis increment
in Equation (15) is formulated using the Schur product, as follows:
and
represent horizontal and vertical localization vectors, respectively. The Schur product of two matrices having the same dimension is denoted by
, and it consists of the element-wise product, such that
.
3. Application of the POD-4DEnVar Method in Satellite Data Assimilation
From the principles of POD-4DEnVar, we know that the key to the method for satellite data assimilation is the construction of the OPs matrix
and the POD decomposition. The observation operator
must be used in calculating simulated observations. Because brightness temperature is not a forecast variable of the numerical model, the observation operator is a complex radiative transfer model. The CRTM radiative transfer model is one of the most widely used rapid radiative transfer models in satellite data assimilation [
33]. The CRTM can calculate satellite brightness temperature quickly and accurately, and thus it is very suitable for application to the satellite data assimilation system. Observations from Microwave Humidity Sounder (MWHS) and Microwave Temperature Sounder (MWTS) onboard Fengyun-3A can provide the vertical information of atmospheric temperature and humidity, which is very important to the numerical weather forecast. The MWHS contain five channels, mainly using the water vapor absorption band to detect the vertical humidity structure of the atmosphere. The MWTS contain four channels, mainly using the oxygen absorption band to detect the vertical temperature structure of the atmosphere. The center frequency and weighting function peak height of FY3A-MWHS and MWTS are displayed in
Table 1. The remote sensing information of these channels contains more information about the humidity and temperature of the atmosphere. Through simulating the brightness temperature of each channel of MWHS and MWTS by CRTM, the observation perturbations matrix is constructed, and POD-4DEnVar Satellite Assimilation System is constructed.
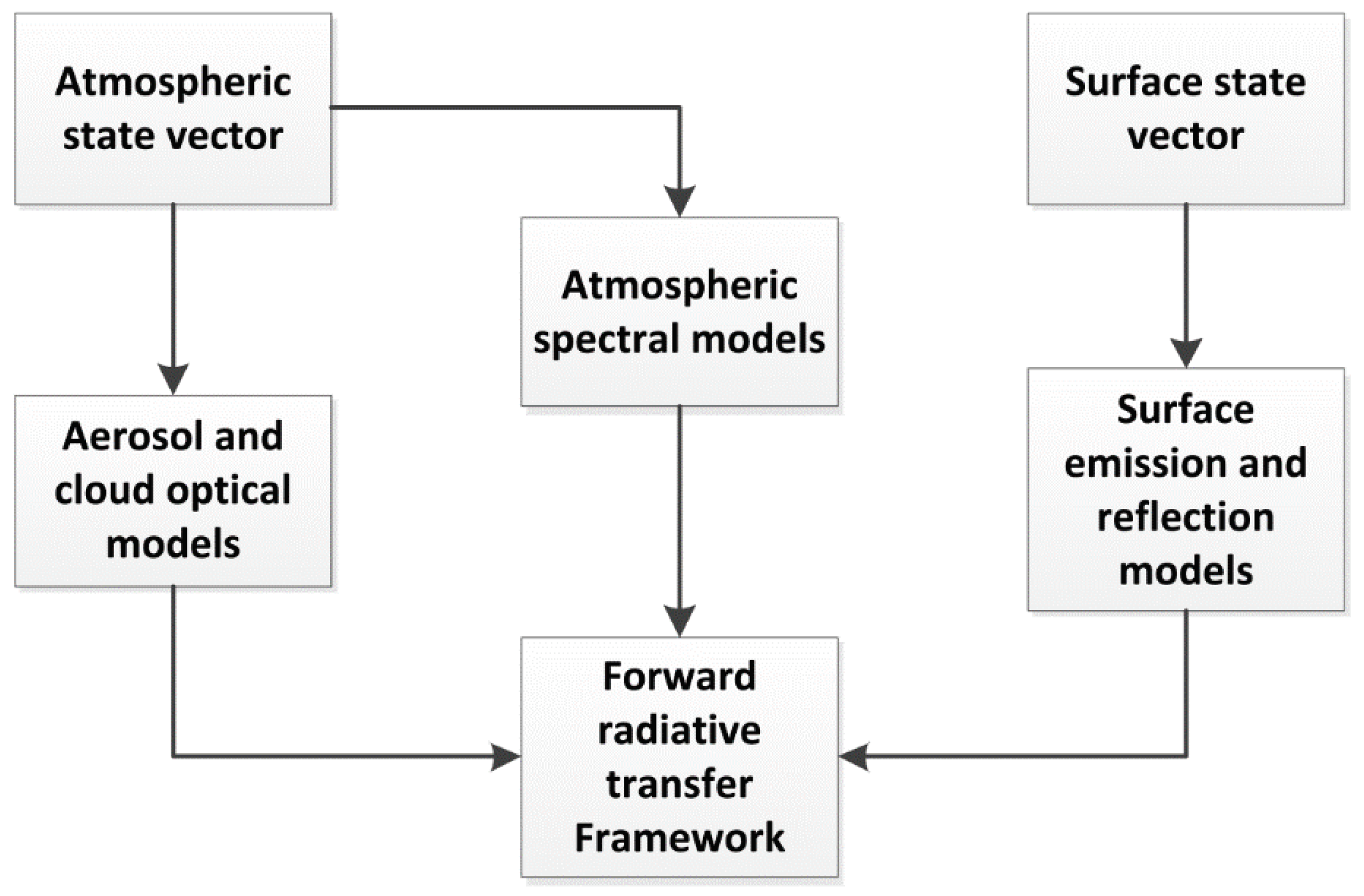
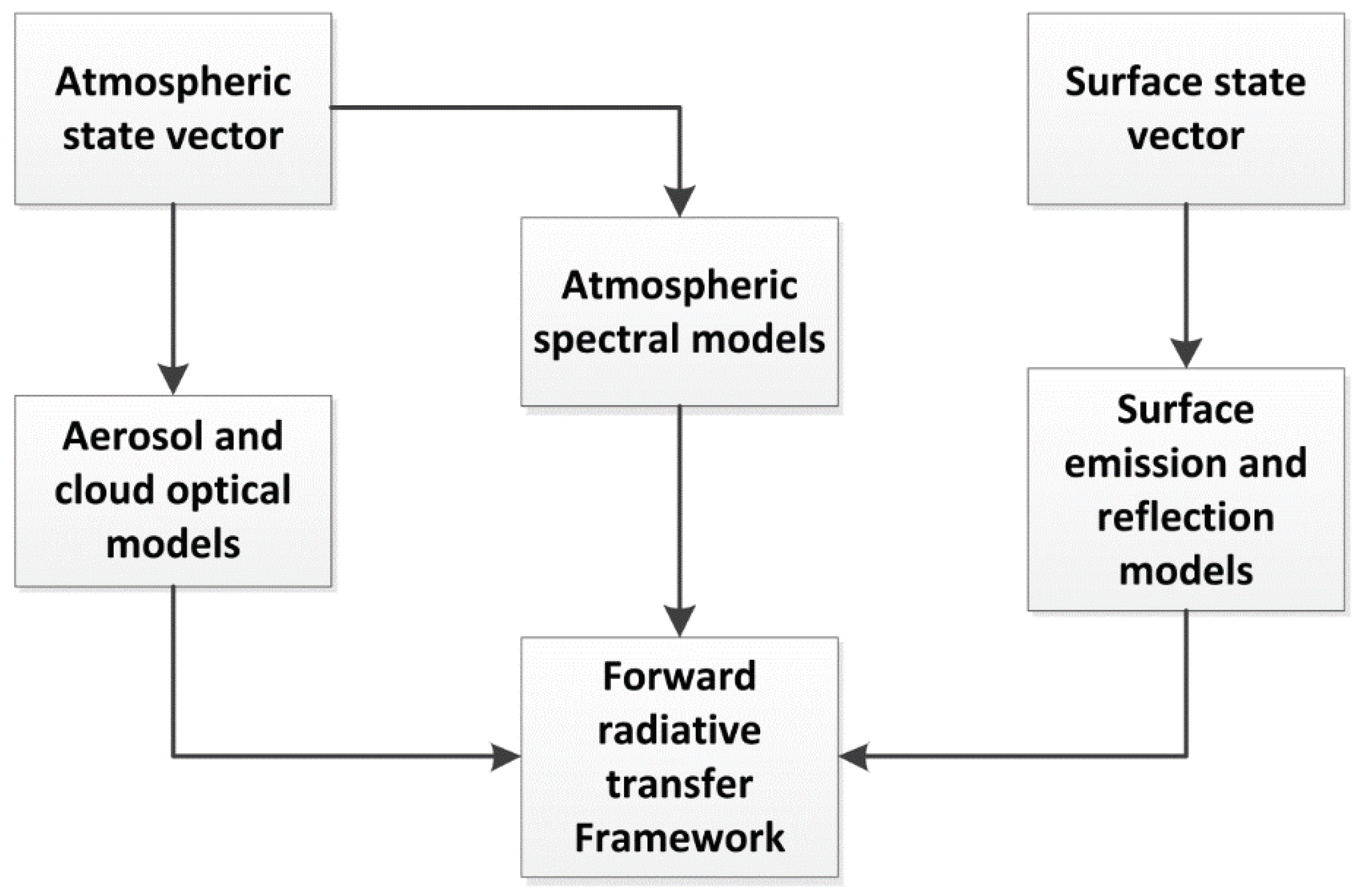
Figure 1 shows the composition of the CRTM radiative transfer model. First, we need to provide the atmospheric state vector, including the atmospheric temperature and humidity profile and the surface state vector as input fields. The optical thickness of the atmospheric absorption components is calculated with an atmospheric spectral model, and the absorption and scattering of clouds and aerosols are also considered when they affect observations. Atmospheric downward radiation interacts with the earth’s surface and the surface emissivity is calculated by an emission-reflection model for the earth’s surface. By integrating atmospheric absorption, cloud and aerosol absorption, and scattering optical coefficients, the atmospheric transmissivity is calculated. Inputting atmospheric transmissivity and surface emissivity into the forward radiative transfer model, the satellite brightness temperatures can be simulated. Therefore, by mapping ensemble perturbations to observation space through the CRTM model, the OPs matrix in the assimilation window can be obtained. This process is critical to the implementation of POD-4DEnVar Satellite Assimilation System.
Figure 2 shows the flowchart of the POD-4DEnVar Satellite Assimilation System. The first step is ensemble forecasting that produces ensemble forecasting samples in the assimilation window. The second step is to map the ensemble forecasting members into observation space through the CRTM model to produce the OPs. Then, the OPs matrix is constructed in the assimilation window. The third step is to perform POD decomposition on the OPs matrix to obtain decomposed eigenvalues and eigenvectors. The eigenvalues are truncated and the corresponding major eigenvectors are obtained. The OPs matrix is transformed according to the major eigenvectors to obtain the independent OPs matrix. At the same time, the MPs matrix is also transformed according to the eigenvectors in order to obtain the independent the MPs matrix. The fourth step is to plug the transformed OPs matrix, the transformed MPs matrix and the observation innovation
into the Formula (1). This gives an explicit expression of the analysis increment. Horizontal and vertical localizations are then calculated for the analysis increment, and finally, the localized analysis increment is added to the background field to obtain the analysis field. Note that before the real satellite data are introduced into the POD-4DEnVar assimilation system, they should be preprocessed, including channel selection, quality control, thinning, and bias correction.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}