1. Introduction
GPS Radio Occultation (RO) is an active limb viewing technique that takes advantage of phase and amplitude of two L-band electromagnetic signals transmitted from GPS and received on low earth orbit (LEO) satellites [
1]. A GPS signal passing through Earth’s atmosphere is refracted and attenuated, which induces delay and bending. A measure of the atmospheric density in terms of the bending angle parameter is derived from Doppler shifts based on precise clocks, satellite orbits and velocity measurements. Since the GPS signal is considered to be insensitive to clouds, it can be used in any weather condition [
2] and enables observations with high accuracy, precision and vertical resolution [
1]. However, as in any observations, RO measurements are affected by noise, which is attributed to three main sources: instrumental, ionospheric and small-scale turbulence [
3]. The profiles of the neutral atmosphere retrieved from RO observations are the most accurate within the upper troposphere and lower stratosphere. Scherllin-Pirscher et al. [
4] demonstrated that the global mean observation errors are as low as 0.3% for bending angle, 0.1% for refractivity and 0.2 K for a dry temperature at altitudes between 4 and 35 km.
The difference between dry RO parameters and actual parameters is negligible above about 8–12 km altitude [
4]. In dry retrievals where the temperature is low enough (i.e., T < 250 K) [
5], water vapor is neglected and ideal gas and equilibrium assumptions can be applied. Next, atmospheric pressure and accurate temperature profiles can be derived using reduced refractivity equation. In wet retrievals, the dry assumption is invalid and water vapor influence cannot be neglected. In this case, additional information about temperature, pressure or water vapor pressure is needed to retrieve the physical atmospheric parameters. In general, a priori information from global weather analysis is combined with RO profiles in one-dimensional variational (1DVar) method.
RO profiles contain valuable information about the atmosphere around the tropopause and they are useful in the investigation of deep convective storms and tropical cyclones [
6,
7,
8]. Tropical cyclones (TC) are destructive natural hazards, which affect wide tropical and subtropical areas and cause catastrophic damage including consequences to public health [
9] and strong socioeconomic impact [
10]. TCs are very dangerous not only because they produce strong winds, copious rainfall and wind-driven waves but also because of the storm surges that can result in floods and landslides [
11]. Maximum mean wind speed is a key parameter defining the intensity of TC. This speed is usually estimated applying Dvorak technique to visible and infrared satellite images [
12], or rarely using in situ measurements. Furthermore, Vergados et al. [
13] demonstrated a new way of estimating TC intensity based on temperature profiles from RO observations.
Remote sensing observations of cloud-top height, cloud-top temperature and cloud profiling information are an important input to the TC strength prediction [
14]. In mature TC, the eye of the storm is dominated by outward sloped low-level clouds such as stratus or convective stratocumulus clouds, while TC outflow consists of upper-level cirrus and cirrostratus [
15]. In general, a fraction of very cold clouds within TC is much higher compared to clouds outside TC and such clouds contribute to the local cooling of the cold-point tropopause by 10 K. Furthermore, 29% of the clouds reach a temperature of 15 K below the temperature of the tropopause and 9% of them penetrate the tropopause [
16]. In the tropics, the change from the troposphere to the stratosphere occurs gradually in a layer rather than at a sharp tropopause. This layer is called the tropical tropopause layer (TTL) and is defined with a bottom at 14 km and a top at 18.5 km. Convective clouds in TTL reach altitudes around 10–15 km or even higher, overshooting the TTL [
17]. Tropopause and TTL can be accurately determined using RO measurements which are very sensitive to the vertical temperature gradients. Furthermore, this ability allows comprehensive investigating TC thermal structure with cold anomaly and TC overshooting of the tropopause [
18,
19].
Due to its all-weather, all-day capabilities, the RO technique could be useful in TC cloud detection. Lin et al. [
20], as one of the first, analyzed RO refractivity and temperature profiles in cloudy and clear conditions and identified impact of clouds to RO retrieval based on collocated CloudSat observations. They found positive refractivity bias of differences between RO and National Centers for Environmental Prediction–National Center for Atmospheric Research (NCEP-NCAR) reanalysis and European Centre for Mediu—Range Weather Forecasts (ECMWF) analysis in cloudy-sky, while, in contrast, the negative bias was observed in clear areas. Furthermore, the mean temperatures differences between models and RO near and just below the cloud top demonstrate positive anomaly with a maximum around 1–2 K. However, this analysis was limited to clouds with top below 12 km to avoid the compounded effect of the tropopause.
Yang and Zou [
21] and Zou et al. [
22] extended the work of Lin et al. [
20] by evaluating the contribution of liquid water content (LWC) and ice water content (IWC) of clouds to RO refractivity using CloudSat data. The impact of LWC on total refractivity reaches 0.8% by single clouds. At the same time, IWC contribution to the total refractivity increases linearly with the amount of IWC and reaches a maximum of about 0.6% at 1 g m
. Thus, it was proposed to include the clouds’ effect in RO retrievals because a 1% uncertainty in refractivity could introduce significant errors in derived water vapor profiles. Furthermore, Hordyniec [
23] reported that neglect the clouds with the contribution of 0.7% to the total value in terms of refractivity introduce bending error of nearly 4%.
RO-based cloud studies on the impact of the IWC and LWC [
20,
21,
22] were based on thorough experimental studies but did not use the RO uncertainty to investigate the significance of this impact. Furthermore, previous clouds’ impact studies on the RO signal were focused on refractivity, which is a product that requires spherical symmetry assumption to be calculated. Thus, for the first time, we investigated an impact of clouds on RO bending angle retrieval using ice and liquid refractivities, as well as bending angle uncertainties.
The aim of this work was to examine how sensitive RO observations are to the presence of clouds in TCs during 2007–2010. Dense clouds, i.e. the anvils, cumulus, and cumulonimbus clouds associated with TCs, provide an excellent environment to study clouds’ impact on GNSS signal. Based on the assumption of spherical symmetry, ERA-Interim refractivity profiles were converted to the bending angle, including and excluding cloud effect derived from CloudSat measurements, and validated against RO error retrievals. In the final step, we investigated the extent of the atmosphere where clouds are detectable, the frequency of selected observations and bias magnitude.
This paper is organized as follows. The datasets used in this study are described in
Section 2. The theoretical background of clouds’ impact on RO retrievals and our methodology are provided in
Section 3.
Section 4 presents numerical results on estimating RO sensitivity to the presence of clouds in TC. Discussion, our conclusions and future work are provided in
Section 5 and
Section 6.
3. Methods
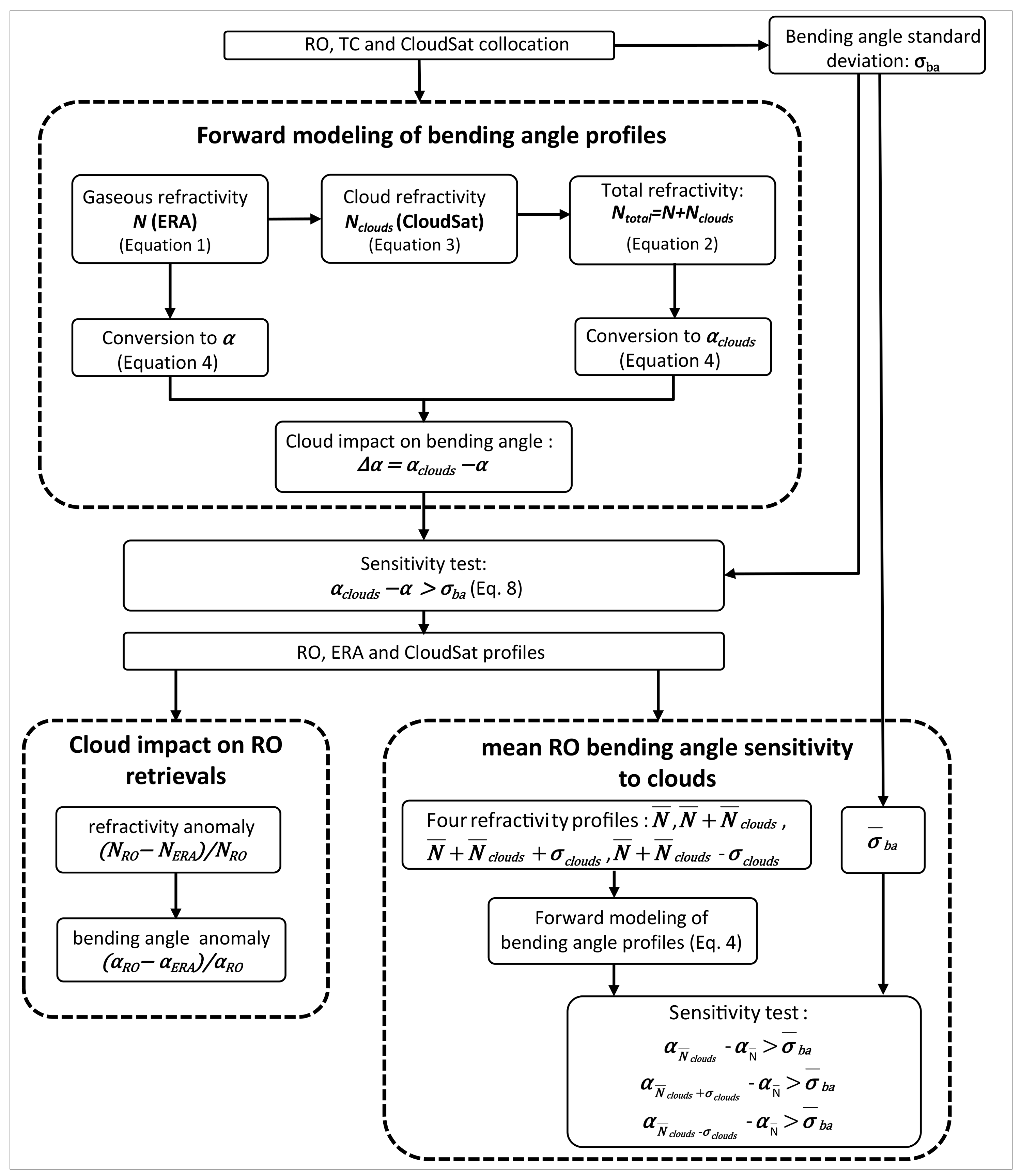
Our study was divided into three main steps:
Using meteorological parameters provided in eraPrf products and additional collocated CloudSat measurements, refractivity profiles with and without clouds were calculated. The obtained profiles were converted to bending angles, and potential clouds’ impact on bending angle was assessed as the difference between them. Cloud content is significant if the computed difference exceeds bending angle standard deviation.
Clouds’ impact on RO refractivity and bending angle were estimated as fractional differences between RO observations and ERA background.
RO sensitivity to the presence of clouds was investigated. Based on cases with significant cloud content, we calculated four kinds of refractivity profiles: mean gaseous, mean gaseous plus mean cloud, mean gaseous plus mean cloud plus standard deviation of clouds and mean gaseous plus mean cloud minus standard deviation. We then tested whether assessed clouds impacts on bending angle are significant and exceed mean observation error provided by the CDAAC in atmPrf.
A brief summary of the entire process described above is illustrated in
Figure 2 and presented in detail in the following sections.
3.1. Forward Modeling of Bending Angle Profiles
Both gaseous and non-gaseous components can refract the GPS signal as it passes through the atmosphere. The atmospheric refractive index (
n) is defined as the ratio between the speed of light in a vacuum and corresponding medium of propagation. Since the refractive index in a neutral atmosphere is almost equal to unity, it is convenient to express it in terms of the refractivity:
. Usually, refractivity is considered to be proportional to temperature (
T), pressure (
P) and water vapor (
e), as described by Smith and Weintraub [
34]:
However, the non-gaseous refractivity, containing the contribution of liquid and ice water could also be taken into account. Clouds contribute to the total refractivity according to equation:
where
is defined as:
and
and
are liquid water and ice induced, refractivity.
The meteorological parameters mentioned in Equation (
1) can be retrieved from eraPrf products but
and
(Equation (
3)) must be assessed from collocated CloudSat profiles.
Total refractivity can be simulated in two ways: first, using gaseous part only (Equation (
1)); or, second, including cloud water (Equation (
2)). Next, the derived refractivities can be converted to bending angles, taking into account that the most significant change in bending angle is attributed to vertical density gradients [
5]. Therefore, the spherical symmetry of the refractive index field is assumed and the total refractive bending angle (
) can be expressed as:
where
r is distance from the center of curvature of a ray path and the integral is over the portion of the atmosphere above the radius of the tangent point
and impact parameter
a, which is constant for a given ray path. In a spherically symmetric atmosphere, the impact parameter can be derived from Bouguer’s rule as:
, where
is the angle between the position vector and the tangent of the ray path.
The two datasets—(1) bending angles
, using traditional gaseous atmosphere refractivity Equation (
1); and (2) bending angles using refractivities including cloud effects
in Equation (
2)—were used to assess the potential impact of clouds on RO bending angles. The difference
is an approximation of the clouds’ impact on the bending angle.
3.2. Clouds’ Impact on RO Retrievals
Meteorological parameters provided in ERA-interim reanalysis were transformed into refractivity profiles (
) according to Equation (
1). Evaluation of these profiles allowed to verifying the RO refractivity retrievals (
), as demonstrated in [
21,
22]. Alignment of
to ECMWF model is estimated as the fractional N differences
:
It is clear from Equation (
2) that gaseous and cloud terms contribute to the total refractivity and to the fractional differences defined above. Furthermore, as mentioned earlier, RO refractivity retrievals are affected by clouds, which influence is neglected in
estimation. From this, we can conclude that values of refractivity biases should be greater within clouds than those in clear sky conditions. This assumption is proven in [
21], where positive values of mean
have been found within liquid clouds below 10 km. However, cloud contribution to
is one order of magnitude smaller compared to the total value. The rest of the discrepancy comes from the dominant gaseous component, which can be expressed in the form of dry (
) and wet parts (
) as the first and second terms in Equation (
1). Hence, we can rewrite Equation (
5) as:
The contribution of dry and wet parts to the total fractional error varies depending on the cloud types. It is worth mentioning that the wet parts can be muc larger than the dry parts, especially in cumulus clouds [
21].
Converting the refractivity profiles to the bending angle according to Equation (
4) allowed calculating bending angle anomaly, similar to Equation (
5):
where
denotes bending angle without cloud contribution.
3.3. RO Bending Angle Sensitivity to Clouds
Based on our calculations, the clouds’ impact on the bending angle is, on average, about 200 times smaller than the total bending angle value (0.5% of total refractivity). To assess whether this small value can be retrieved, two types of sensitivity test were provided: (1) case-based; and (2) population-based.
The case-based test verified whether the difference between ERA bending angles with and without clouds is significant with respect to the bending angle uncertainty. For each RO profile, the derived difference between ERA bending angles with and without clouds from CloudSat () was compared to RO bending angle uncertainty ().
The sensitivity test is passed if the difference is greater than bending angle uncertainty:
Since this approach can result in many patched profiles with mixed significant/insignificant sections (hereafter cloud detection range), we applied a two-step algorithm to reduce this effect. First, layers in which height differences do not exceed 0.1 km were merged into one layer and this was followed by rejection of cloud layers with a thickness smaller than 0.5 km.
In the second type of sensitivity test, a population-based test was performed as clouds impact on RO bending angle varies depending on weather conditions, especially during TC (larger ice and water contents translate to larger refractivity) and RO data accuracy (larger horizontal gradients and ionosphere variability will cause larger uncertainty). Hence, we examined mean clouds’ influence on the bending angle. Assessing the potential of this impact was based on the variability analysis; we excluded the outliers and calculated mean
and standard deviation
of profiles
, according to Equation (
2), for all TC cases during 2007–2010. As a result, three profiles were created:
,
, and
. Afterwards, each refractivity profile was added to mean gaseous refractivity
and forward modeled to bending angle (Equation (
4)).
The retrieved profiles—mean
, upper limit
, and lower limit
—were validated against mean bending angle uncertainty
. Clouds are assessed as detectable if the inequality in any equation defined below holds:
3.4. Collocation of RO, CloudSat and TC Tracks
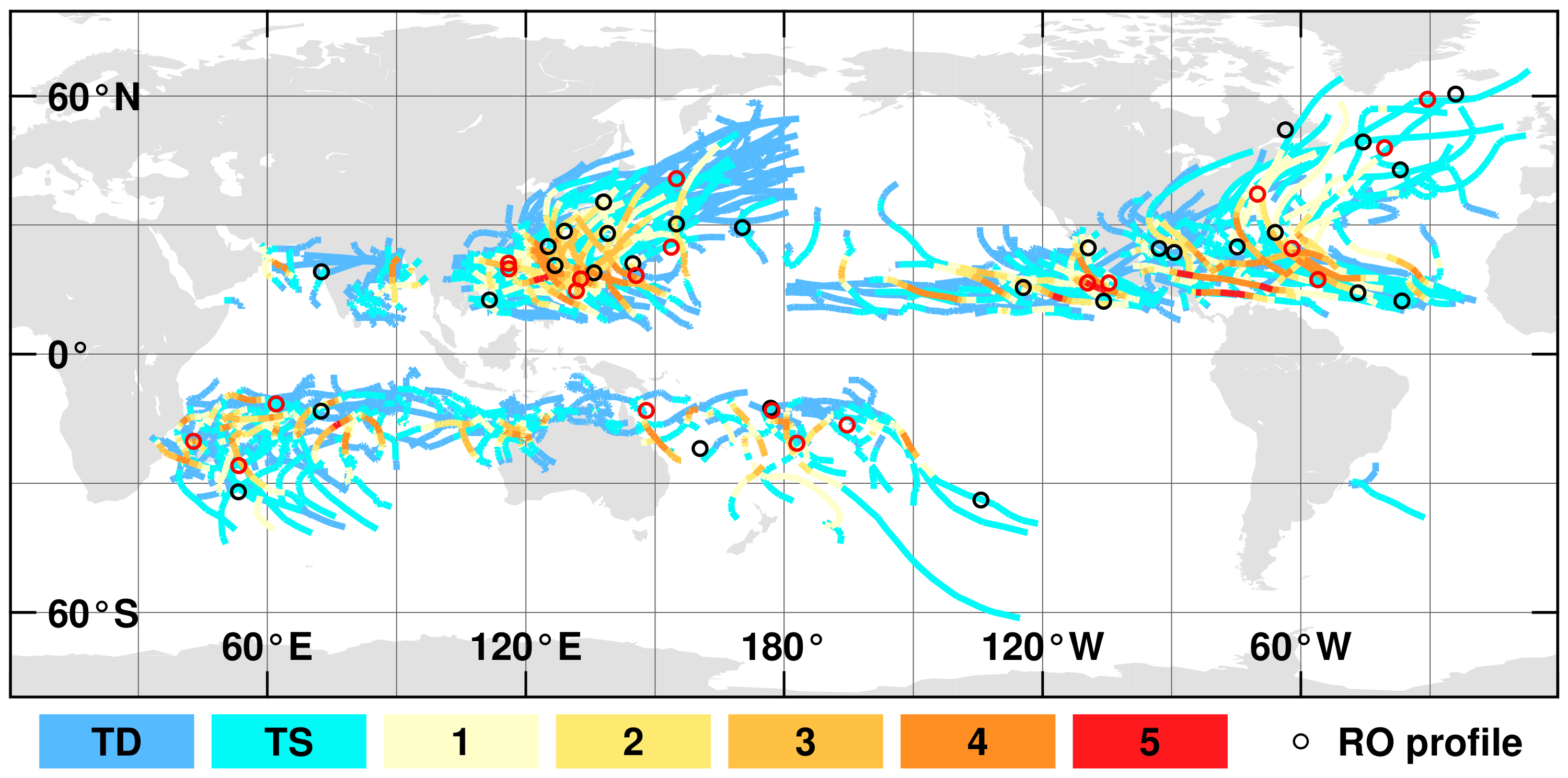
Since appropriate geometry between LEO and GPS satellites must occur to record an RO event, the distribution of RO observations is random across the world. To collocate cyclone tracks with RO profiles, we adopted a two-stage RO profile selection procedure: (1) 500 km distance from the tangent point to TC center (TCs with average wind speed at least 34 knots) and time window of 4 h were applied (5810 RO profiles selected); and (2) then TC’s centers for occultation time was interpolated and 30 kt wind radii or 200 km was used as a maximum acceptable spatial distance between TC and RO profile. The number of collocated RO observations with TCs was limited to 1198 over four years.
Selection of CloudSat profiles was based on RO refractivity location at 10 km height. Collocation criteria of 3 h and distance of 200 km to RO event were applied to CloudSat observations. We then identified all of the CloudSat IWC/LWC profiles that occurred within a 200 km radius from TC center and averaged these with 100 m vertical resolution for a single RO measurement. This results in 50 pairs of collocated CloudSat-RO cases.
5. Discussion
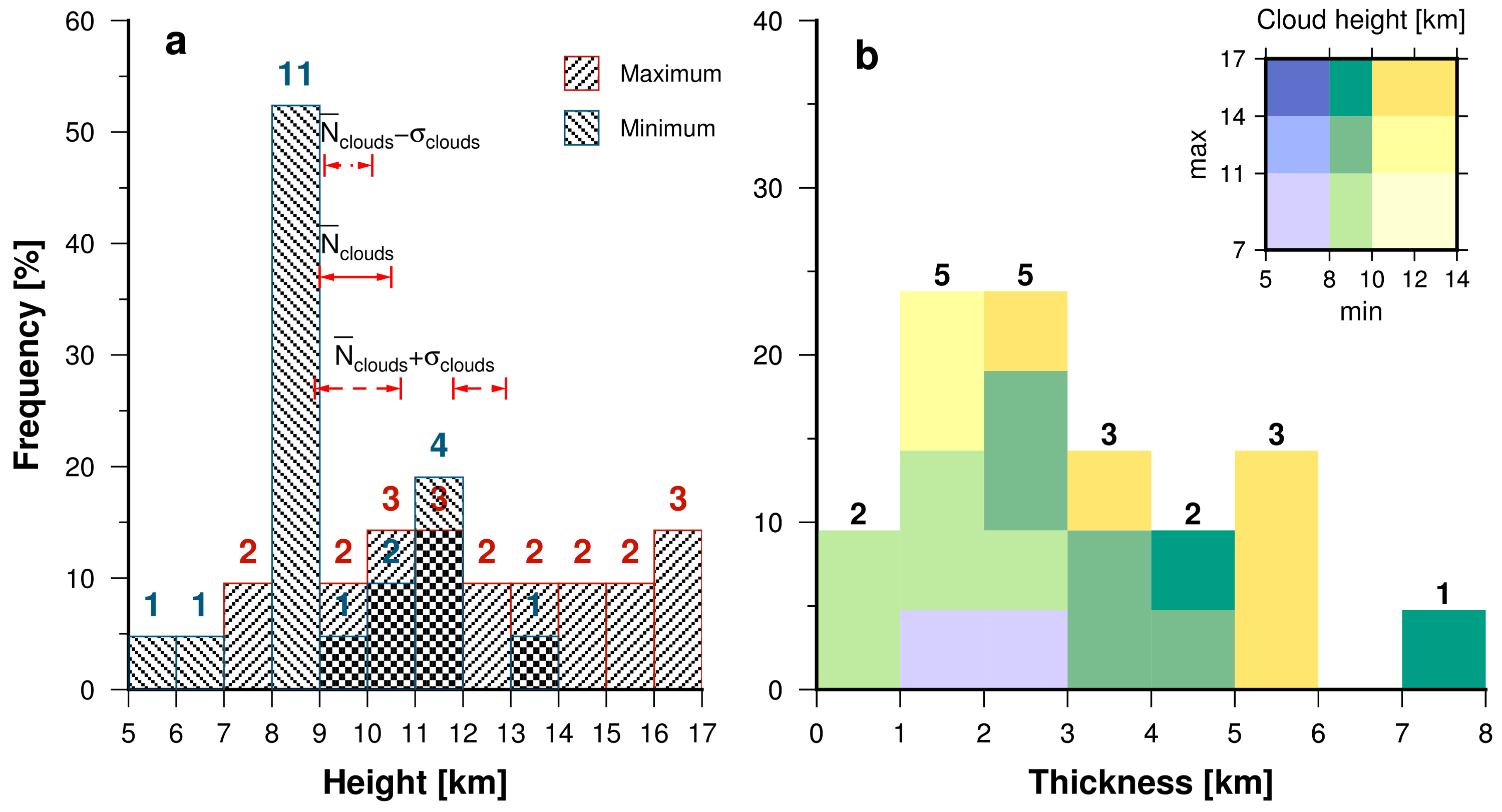
It is widely accepted that RO technique is insensitive to clouds. Our investigation, however, shows this assumption to be invalid in the case of dense clouds present in TC where 42% of profiles were affected by clouds. The altitudes of clouds’ detection ranges vary to some extent but more than half of them have the minimum height in range 8–9 km, which results from the rapid increase of mean RO bending angle error below this height and which implies clouds below 5 km are not detectable. Although maximum heights do not show such clear pattern, most of them do not exceed 14 km and three observations surpass 16 km, which is considered as minimum height of Cold Point Tropopause in tropics and end of Tropical Tropopause Layer [
35]; hence, these clouds can be difficult to detect based only on temperature gradient. Furthermore, on average, the clouds’ detection range thickness is 1–3 km but for most of the observations detection range spreads from 8–10 km to 11–14 km. Interestingly, we observed slightly less than 10% of clouds with detection range thickness of 0.5–1 km, while one of the observations extends for 7–8 km.
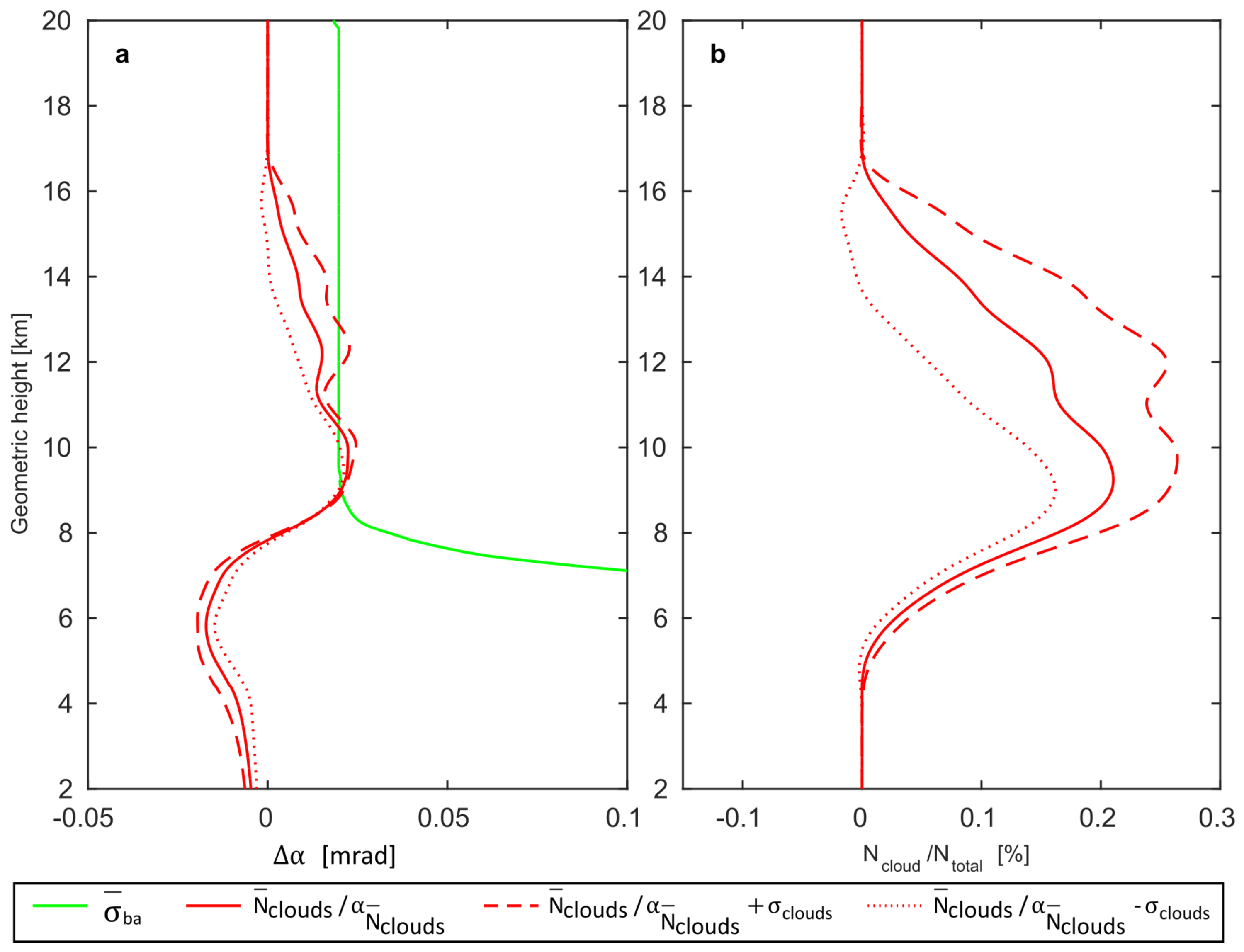
In recent years, growing interest in cloud contribution to total refractivity derived from RO observations is observed. Zou et al. [
22] demonstrated that mean ice cloud contribution to refractivity derived from CloudSat is over 0.1% above 8 km with the maximum impact of single clouds exceeding 0.6%. Our experiment is in line with these results, with mean contribution exceeding 0.1% (
Figure 4b) and maximum around 0.7%. Furthermore, Yang and Zou [
21] stated that the mean effect of the liquid part below 6 km is approximately 0.1% and we obtained negligible values (
Figure 4b). There are a few possible explanations for these differences. First, we took into account whole profiles, not only parts between cloud bases and tops (as done in [
21]), which can introduce zero cloud contribution of single profiles. Next, we investigated cases when the presence of precipitation-sized particles led to the divergence of the liquid water content solutions in the 2B-CWC-RO product and LWC data were unavailable. Finally, we only considered RO profiles, which passed our sensitivity test; hence, we could reject profiles with significant cloud contribution below 9 km because at this height observation noise greatly increased.
6. Conclusions and Future Work
This work demonstrates the clouds’ impact on Global Positioning System Radio Occultation (RO) bending angle profiles during TCs during 2007–2010. In this study, we analyzed RO bending angle sensitivity on potential cloud content derived from the CloudSat mission with respect to the bending angle noise provided by CDAAC. Our results reveal that the influence of clouds is visible in 21 out of 50 investigated cases and reaches up to 0.7% of total refractivity, with a mean of around 0.1%. Almost 15% of the observations with significant clouds’ impact reach a height of 16 km, which is considered to be the minimum height of tropical cold point tropopause.
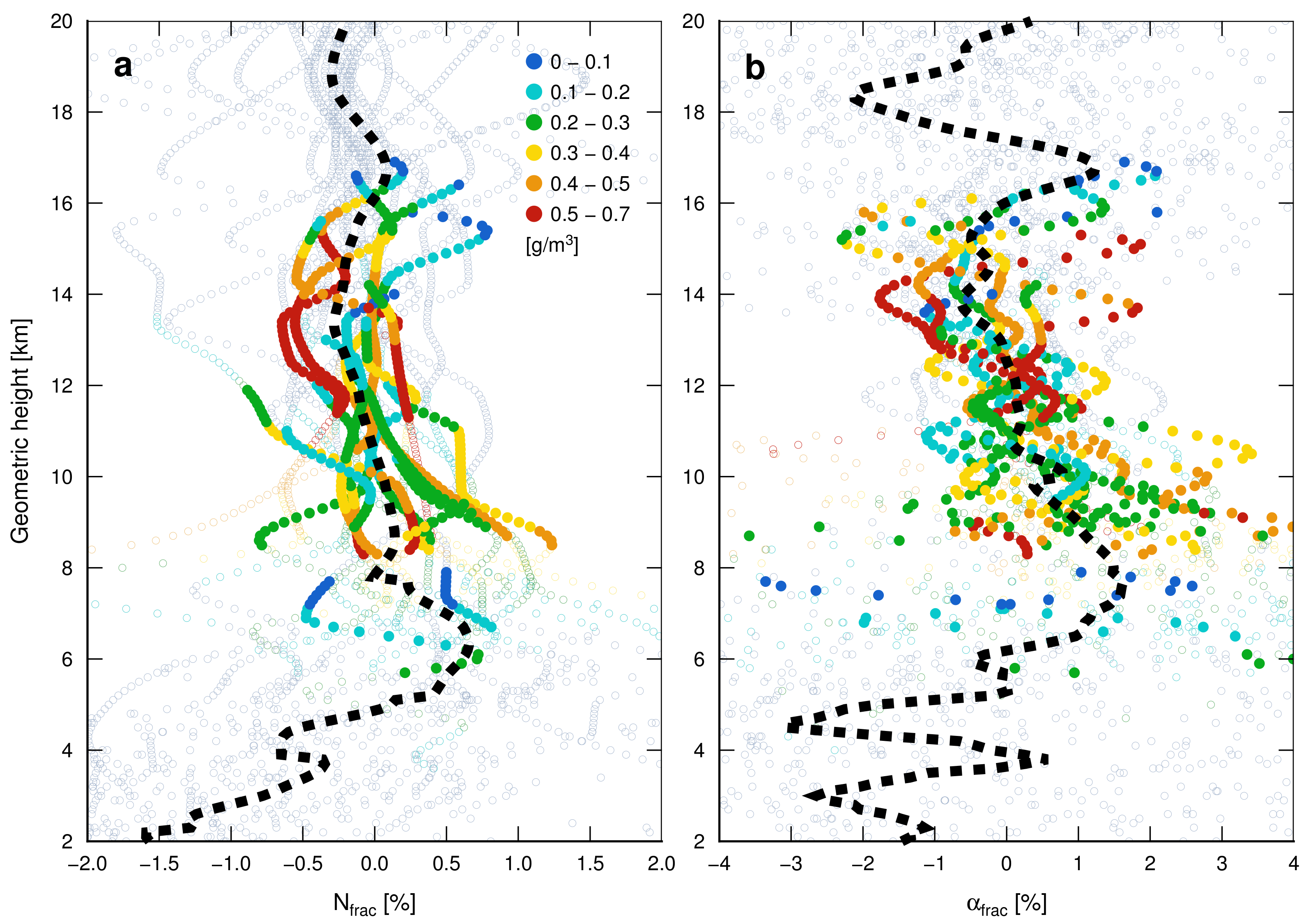
We found that most of the RO observations which passed the proposed sensitivity test correspond well with positive fractional refractivity differences between RO and ERA at 6–11 km height. The largest mean bias of more than 0.5% is located around 7 km, although most of the RO profiles are not significant at this height due to large measurement uncertainty. A similar pattern but shifted up is visible in bending angle biases with a maximum mean fractional difference around 8 km. It is worth noting that positive bending angle bias follows the negative fractional differences and this change is related to the gradient of refractivity.
In our research, we focused on the period 2007–2010, when many RO and CloudSat observations were available. Currently, the number of available RO, as well as CloudSat measurements, is limited. CloudSat operates on a new orbit in daylight only, while COSMIC satellites experienced battery degradation and other technical issues. The launch of six COSMIC-2 satellites into low inclination orbits scheduled in 2018 shall provide us with around 6000 profiles per day. The growing number of observations will be used to investigate whether the bending angle differences could be applied to other, less intensive weather such as extratropical storms, squall lines, Mesoscale Convection Systems and others.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




