1. Introduction
Gas flaring is a global environmental hazard severely impacting air quality, economy, climate, vegetation, and public health [
1]. According to World Bank estimates, over 150 bcm (billion cubic meters) of natural gas is being flared or vented globally each year, which adds about 400 million tons of carbon dioxide to the atmosphere in addition to other harmful impacts [
2]. Flaring is a high temperature oxidation process that burns combustible components. These combustible components mostly constitute hydrocarbons originating from the waste gases of industrial operations [
3]. It is widely used to dispose of economically unprofitable waste gases emerging with oil, but flaring also acts as a safety device providing protection from the over-pressuring of vessels. A profuse amount of the world’s energy supply is continuously lost through gas flaring which contributes to the global carbon emission budget [
4]. Apart from greenhouse gases like methane and carbon dioxide and pollutants like NO
2, SO
2 and CO, the flares contain widely recognized toxins such as benzene, benzopyrene, carbon disulphide (CS
2), carbonyl sulphide (COS) along with harmful metals such as mercury, arsenic, and chromium. These emissions pose a great threat to human health, built-up environments, and the social well-being of the local communities’ inhabitants [
5]. Therefore, it is essential to characterize gas flaring activity and its associated emissions, both spatially and temporally.
The objective of this paper is to evaluate the feasibility of using data from multiple satellite sensors to monitor gas flaring from space. In contrast to ground-based observations, satellite remote sensing provides significant spatial, and sometimes temporal, advantages because of the routine and global coverage by the satellite sensors. The earliest detections of gas flaring using satellite remote sensing data date back to the early 1970s when Croft [
6] observed nighttime imagery (mainly over Africa) from a lowlight sensor (operating in spectral range of 0.4–1.1 µm) belonging to the United States Airforce DAPP (Data Acquisition and Processing Program) system and found gas flares to be the brightest feature observed in the visible band. The DAPP system is now called the Defense Meteorological Satellite Program (DMSP). He used the imagery from the sensor again in 1978, along with the Landsat Multi-spectral Scanner System, to observe gas flares in many parts of the world including Algeria, Libya, Nigeria, the Persian Gulf, Siberia, and Mexico [
7]. He used visual identification and manual analysis procedures for the identification of flares from the images and reasserted that the gas flares associated with the world’s major oil fields were the brightest man-made feature observed from space. Further, Muirhead and Cracknell [
8] used the daytime imagery from NOAA’s AVHRR (Advanced Very High Resolution Radiometer) to detect off-shore gas flaring sites in the North Sea. Their detections were based on the brightness values observed during the daytime in the infrared channel (3.55–3.93 µm) of AVHRR from the pixels containing gas flares. Much later, the DMSP’s Operational Linescan System (DMSP-OLS) products were used to produce maps of gas flares, fishing boats, fires and human settlements for 200 nations as part of the first study to globally detect gas flaring [
9]. Further analyses of DMSP-OLS products by Elvidge et al. [
10] provided the first record of long-term (1994–2005) gas flaring volumes, and through the intercomparison method, these flaring and emission estimate products were extended to 2008 [
2]. Although these studies were able to characterize some gas flaring sites, their procedure relied on visual inspection of images, namely the circularity and bright centers of the flares, which was not time efficient. Also, the spatial resolution of the instruments (e.g., smoothed nominal spatial resolution of 2.7 km for DMSP-OLS) was usually not high enough to resolve the flare location accurately, particularly if the flares were situated in proximity of bright urban areas.
The first study to identify hot sources such as flares was done by Matson and Dozier [
11] who were able to identify some gas flares from oil fields by using the hot source signal in the MidWave InfraRed, MWIR (~3.7 μm), and LongWave InfraRed, LWIR (~11 μm), spectrums from the nighttime AVHRR (onboard NOAA-6) imagery. They highlighted the capability of these bands for fire monitoring which formed the basis of many fire detection algorithms developed afterward such as MODIS, VIIRS, and AVHRR [
12,
13,
14]. A limitation of the fire algorithms based on MWIR and LWIR bands is that the measured brightness temperature is dependent on the background temperature which means the total radiance observed by the satellite instrument is the result of both burning (subpixel fire) and non-burning fractions (background) of the ground pixel. This becomes a shortcoming for hotspot detection in cold areas such as Canada and Russia because the seasonal variation in the background surface temperatures is relatively large. Thus, the fixed threshold algorithm that is optimal for summer may only be able to detect large fires in winter [
4]. Later, an active flare detection algorithm for global flare monitoring was developed by Casadio et al. [
4] using ATSR (Along Track Scanning Radiometers) SWIR band imagery. The use of shortwave infrared (SWIR) bands overcomes the problem faced by the standard fire product algorithm for extremely hot sources like gas flares. Since the background contribution to SWIR during nighttime is negligible, the signal to noise ratio is high. They further revised their algorithm by integrating the use of ATSR and SAR (Synthetic Aperture Radar) nighttime products for North Sea flare detections [
15]. This method offered significant improvement over previous manual detection methods, but the low spatial resolution of the ATSR instrument (1000 m) still posed a challenge toward the accuracy of flare detection.
More recently, Elvidge et al. [
16] developed an algorithm for nighttime global fire activity monitoring using SWIR band (1.6 µm channel as the primary detection band) data from high resolution VIIRS nighttime imagery. The product also uses five more spectral bands in the near infrared, short-wave infrared, medium-wave infrared, and a panchromatic Day-Night band (DNB) for an additional quality check on detections, but the product does not discriminate active flares from other fire sources such as biomass burning and forest fires. While the principle for detecting fires (either biomass burning and gas flares) is the same, gas flaring often has a higher temperature, a smaller area, and a relatively large signal in the SWIR [
16]. Anejionu et al. [
17] also developed a flare detection method based on multispectral infrared band data from high spatial resolution Landsat imagery, but the detections were confined to Niger data only, and their method was handicapped by limitations such as low frequency of available cloud-free images and unavailability of nighttime Landsat data. Nevertheless, all these efforts have paved the way for more precise and automated detections of gas flares globally, so moving forward, a comprehensive study of these new active gas flaring products is essentially required.
Despite the availability of high resolution data from new generation satellite sensors, there have only been a limited number of studies specifically targeted to monitor gas flaring from space, and satellite-based fire or hotspot products are not well-validated for gas flare cases. Since a gas flare can be persistent for weeks, the location and characteristics of gas flares can be best retrieved at nighttime when SWIR from gas flares does not interfere with solar radiation. Therefore, a detailed analysis of the performance of nighttime fire products over gas flaring regions is necessary to reconcile for any significant differences in the detections by MODIS and VIIRS products with the newly developed VNF product over the test region. The study aims to explain the underlying differences between nocturnal fire detections from MOD14, MYD14, VAFP and VNF products. It is well known that factors (listed in
Table 1) such as differences in sensor characteristics, spatial resolution, and along-scan aggregation schemes play an important role in resultant fire detection differences even when sensors have similar orbital characteristics, as in the case of VIIRS and Aqua. In extension to these factors, the study investigates how the choice of primary detection spectral bands affects the fire detections and looks into the validation of parameters reported by the VNF version 1.0 product.
The test region used for the study is Khanty-Mansiysk Autonomous Okrug in Russia. The choice of the region is based on the fact that Russia has lately emerged as the biggest flaring region in the world [
10]. Russia is believed to be responsible for a quarter to a third of globally associated gas flaring. Data from NOAA shows Russia flares about 35 bcm of gas per year, and the related economic losses account for
$5 billion per year [
18]. The satellite-based estimate of gas flaring volumes reported from Khanty-Mansiysk alone account for more than 50% of total Russian flaring [
10]. Moreover, the official and unofficial data on associated gas resources and utilization volumes is not accurate and does not reflect the actual extent of flaring. The discrepancies are because of a lack of adequate instrumentation and equipment to generate precise statistics on flaring volumes. According to the Govt. of Khanty-Mansiysk Autonomous District, only half of the flare units operating in the region were equipped with metering devices as of 2007, which worsens the problem for accurately estimating flaring volumes [
19].
The large amount of gas flaring in Russia has a significant impact on climate. Russian gas flares annually produce almost 100 million tons of CO
2 emissions, given the entire gas is flared efficiently. However, due to a large inefficiency in burning, much more harmful greenhouse gasses are emitted as well. The volume of soot emissions caused by the associated gas flaring is approximately 0.5 million tons/year. Moreover, the presence of abundant gas flares is hugely detrimental to public health, too. Elevated concentrations of nitrogen oxides, sulphur oxides, carbon monoxide, etc. are recorded near the flare vicinity and contribute to the increasing cases of lung and bronchi cancer and damage to the nervous system, liver, and eyesight in the communities affected by gas flaring [
19]. Therefore, it is highly important to study the large gas flaring regions in Russia such as Khanty-Mansisyk, and satellite remote sensing offers significant benefits in that aspect.
3. Analysis of Algorithm Differences
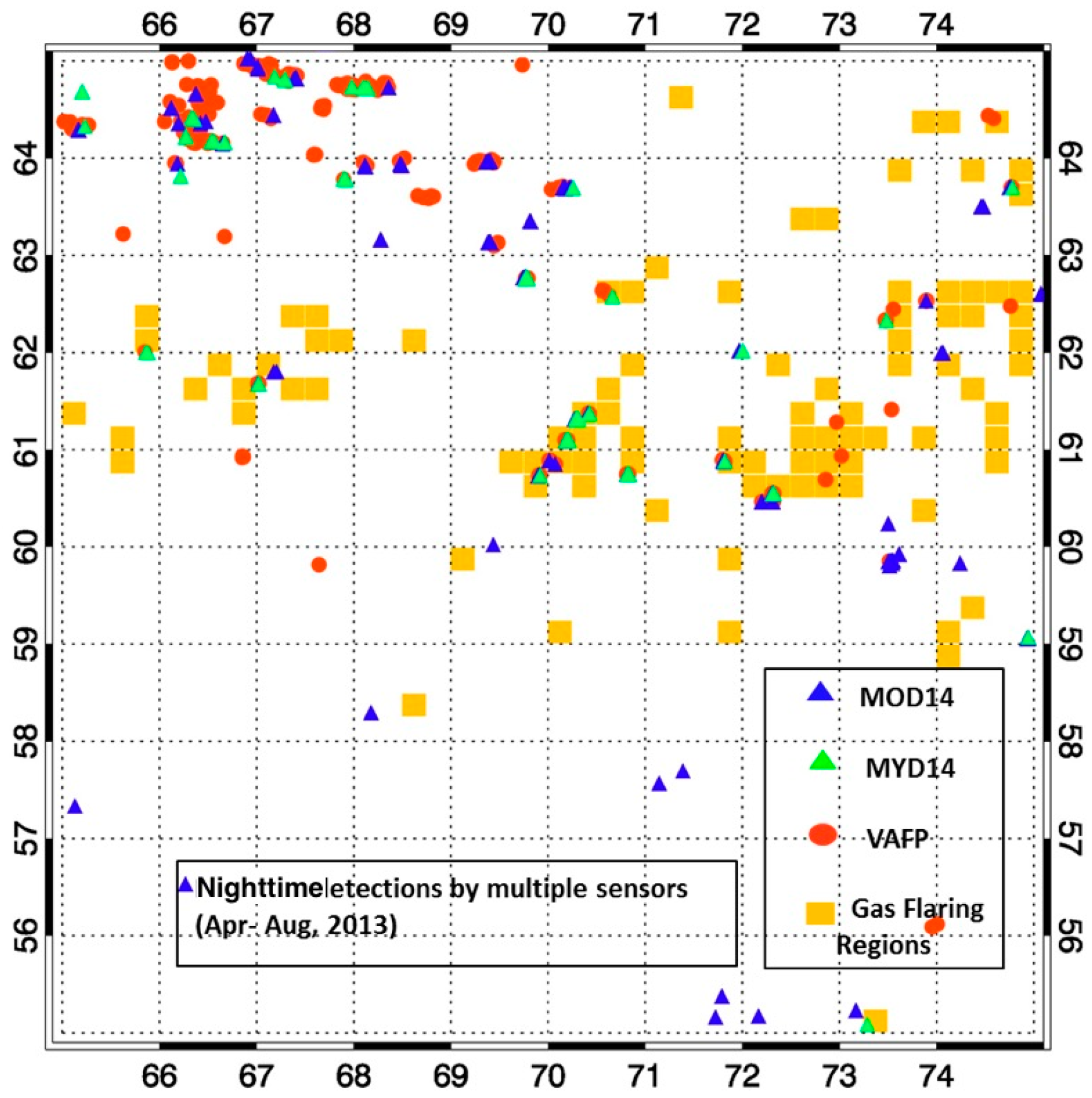
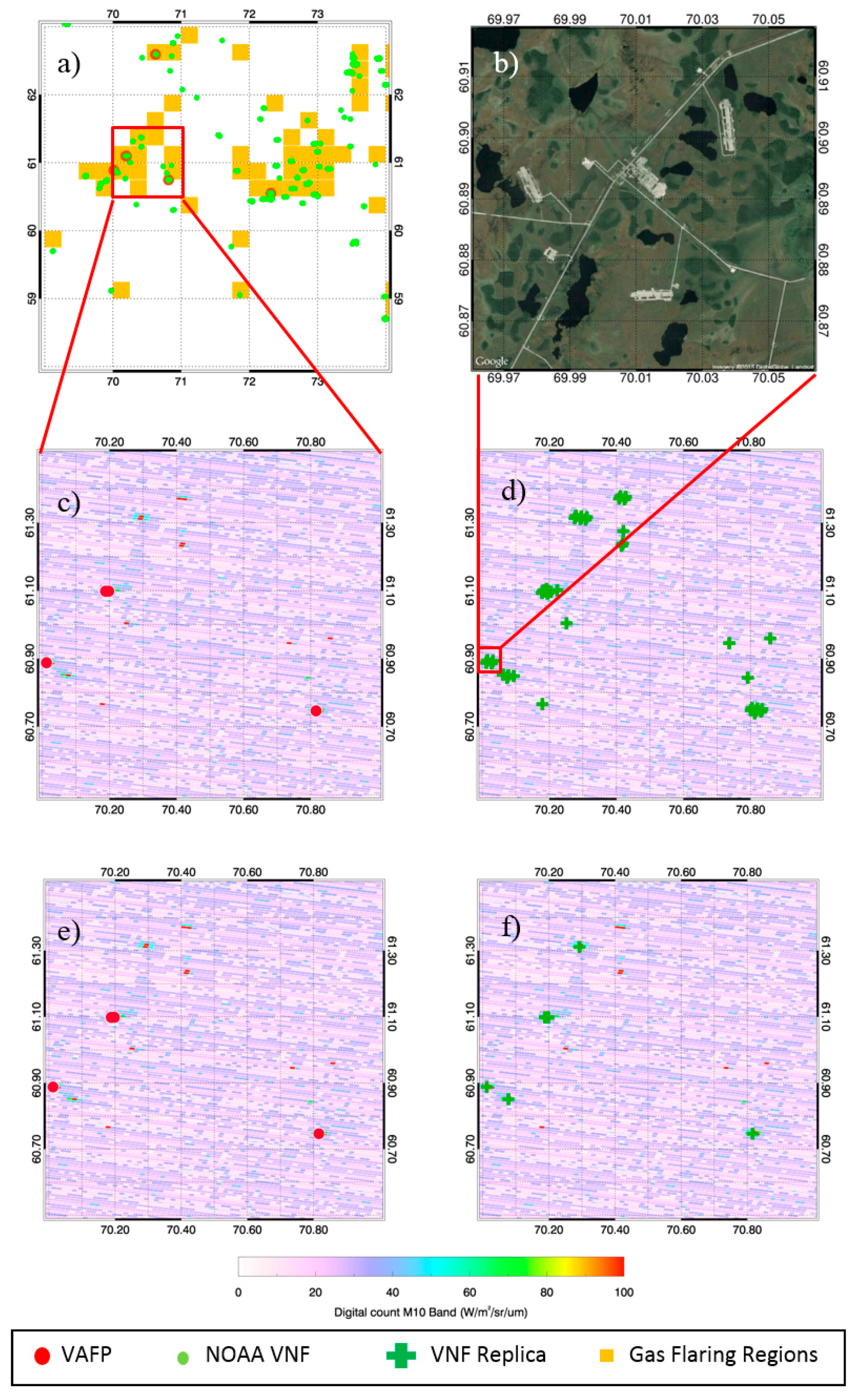
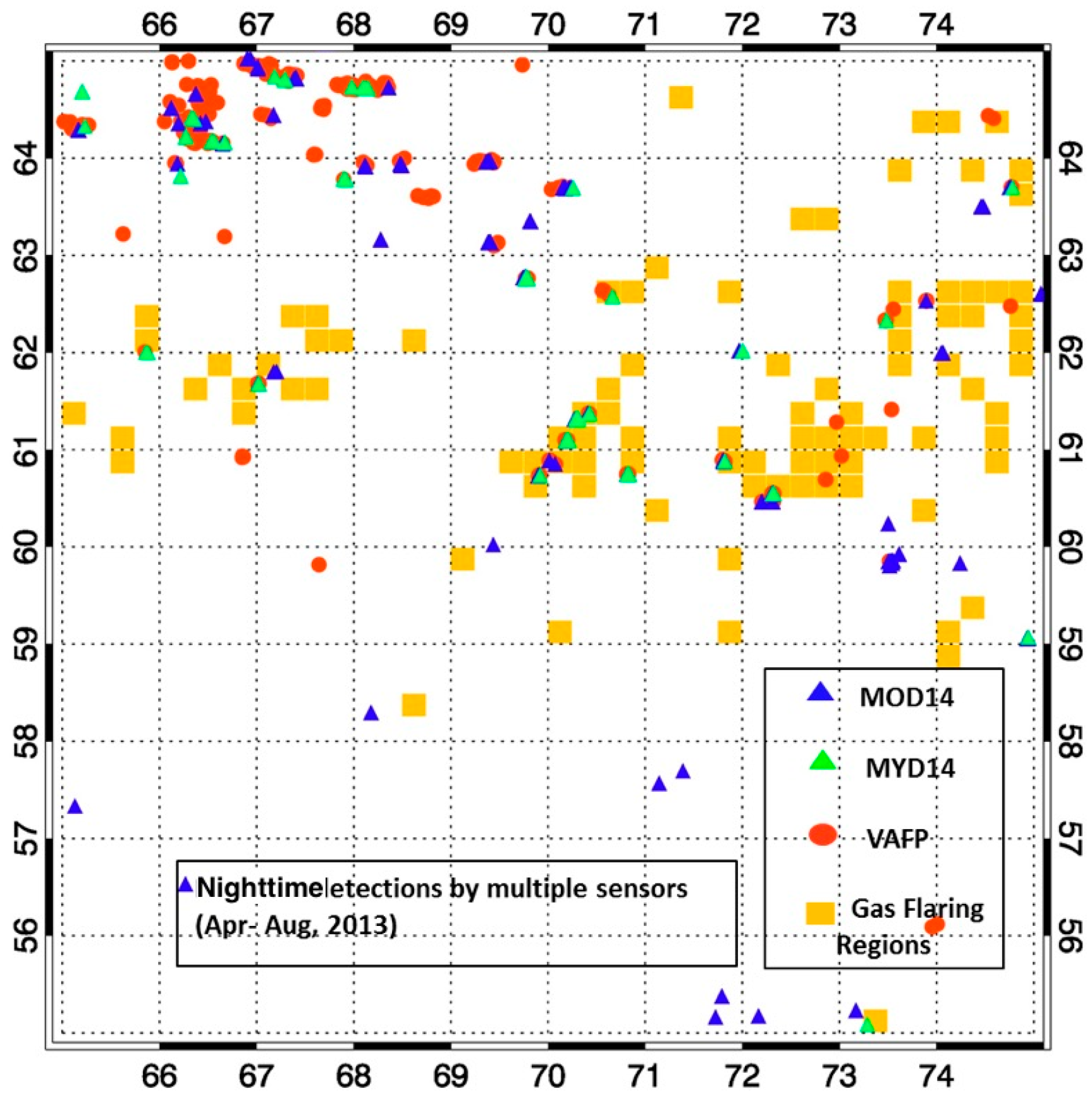
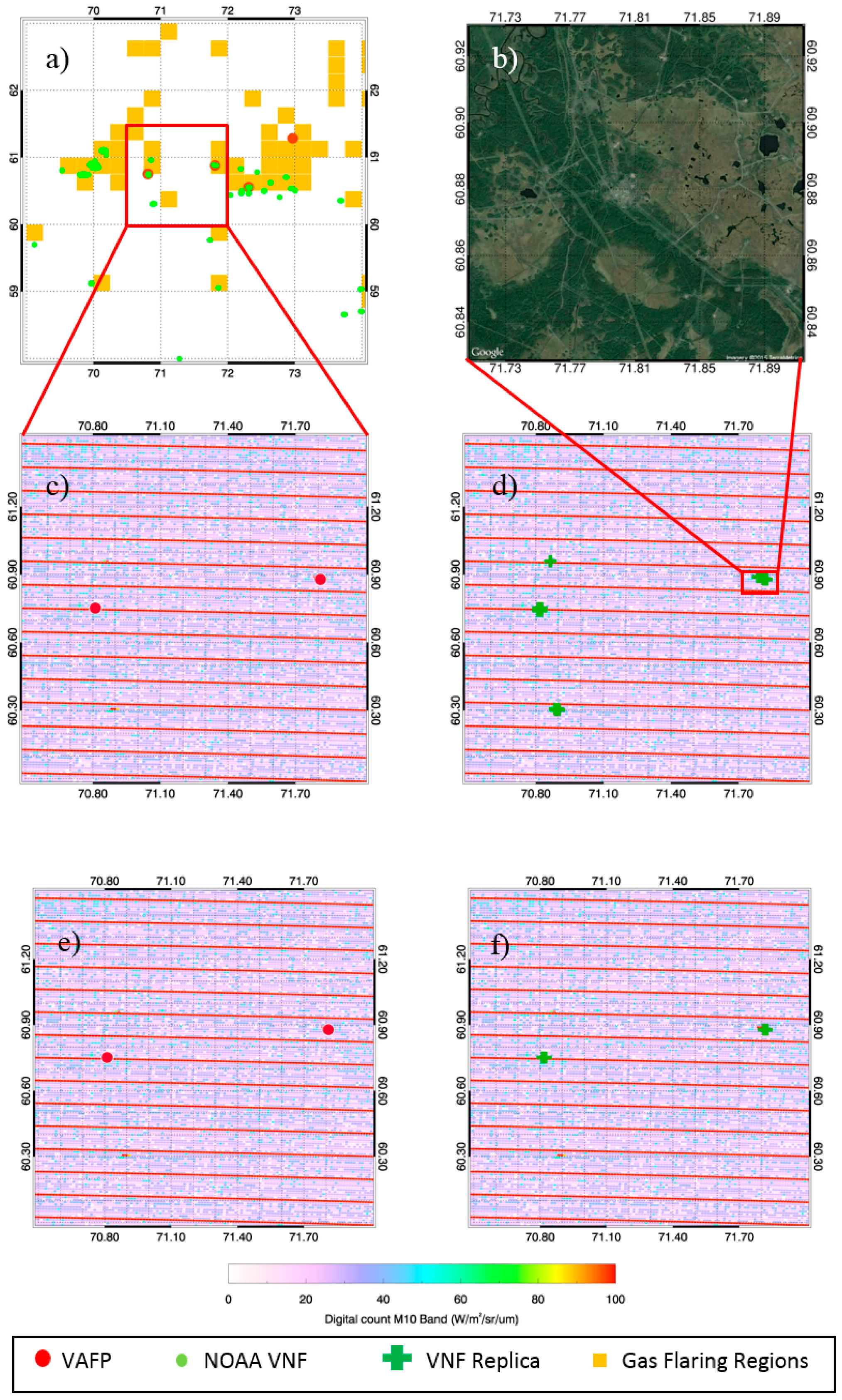
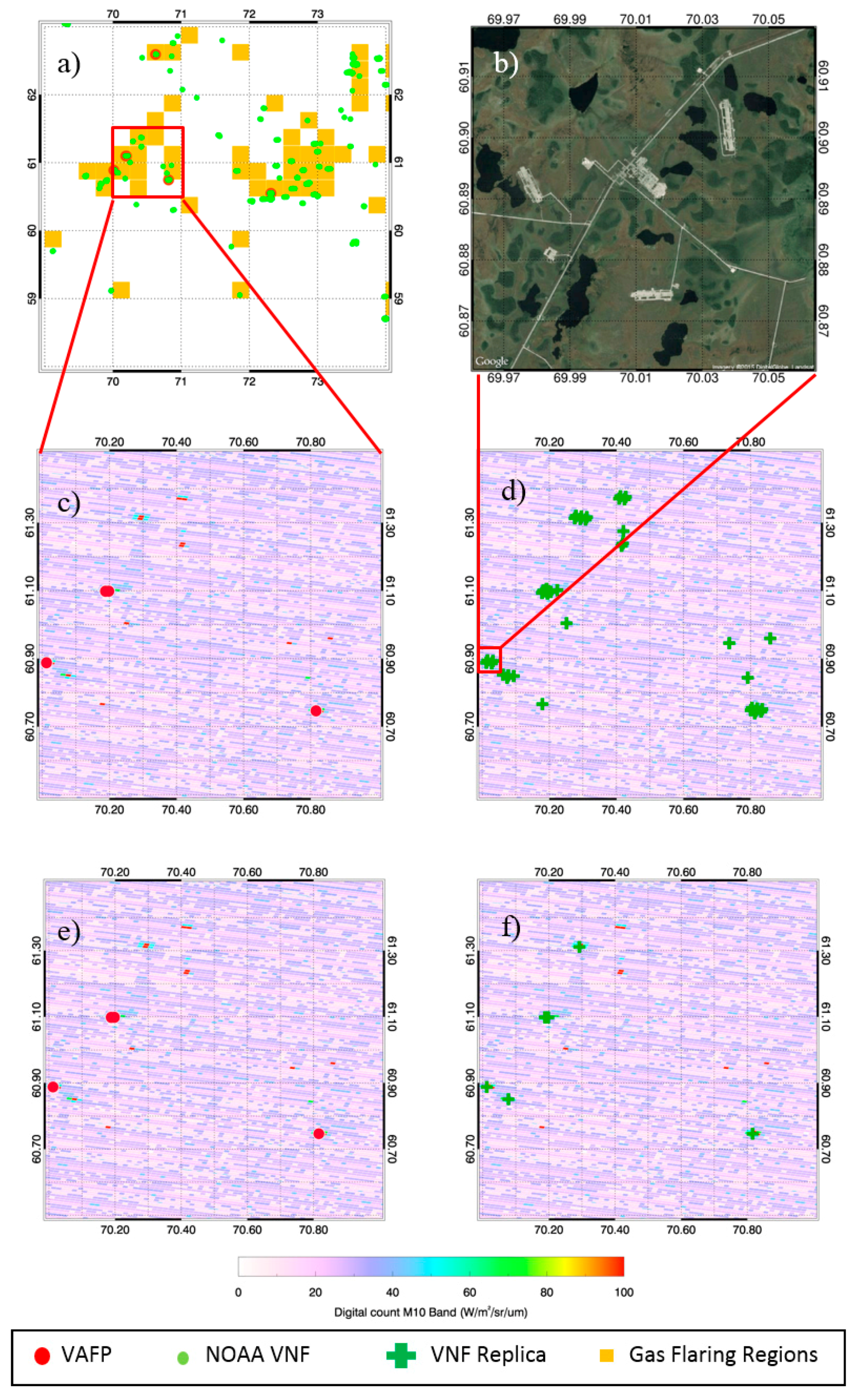
As illustrated by
Figure 2, there are conspicuously large differences between the detections done by the VNF product and the MODIS and VIIRS active fire products. Since the VNF product detects the most flaring activity because of its use of shortwave bands, it was used to demarcate the gas flaring regions that are also verified by visualization of oil refinery locations through GoogleEarth
© maps (next section). The flaring regions were demarcated in order to quantify the number of detections by the different fire products within and outside of these regions to evaluate their performance. The entire study area was broken down into a collection of 0.25° × 0.25° grids. Persistence of detection within the grids and associated high temperature were used as the criteria for delineating the gas flaring regions. The hotspots detected by the VNF were collocated over the reference grid for each day, and a total of 153 days were used. Only the detections having a cloud mask as clear and temperatures higher than 1600 K (temperature criterion from Elvidge et al. [
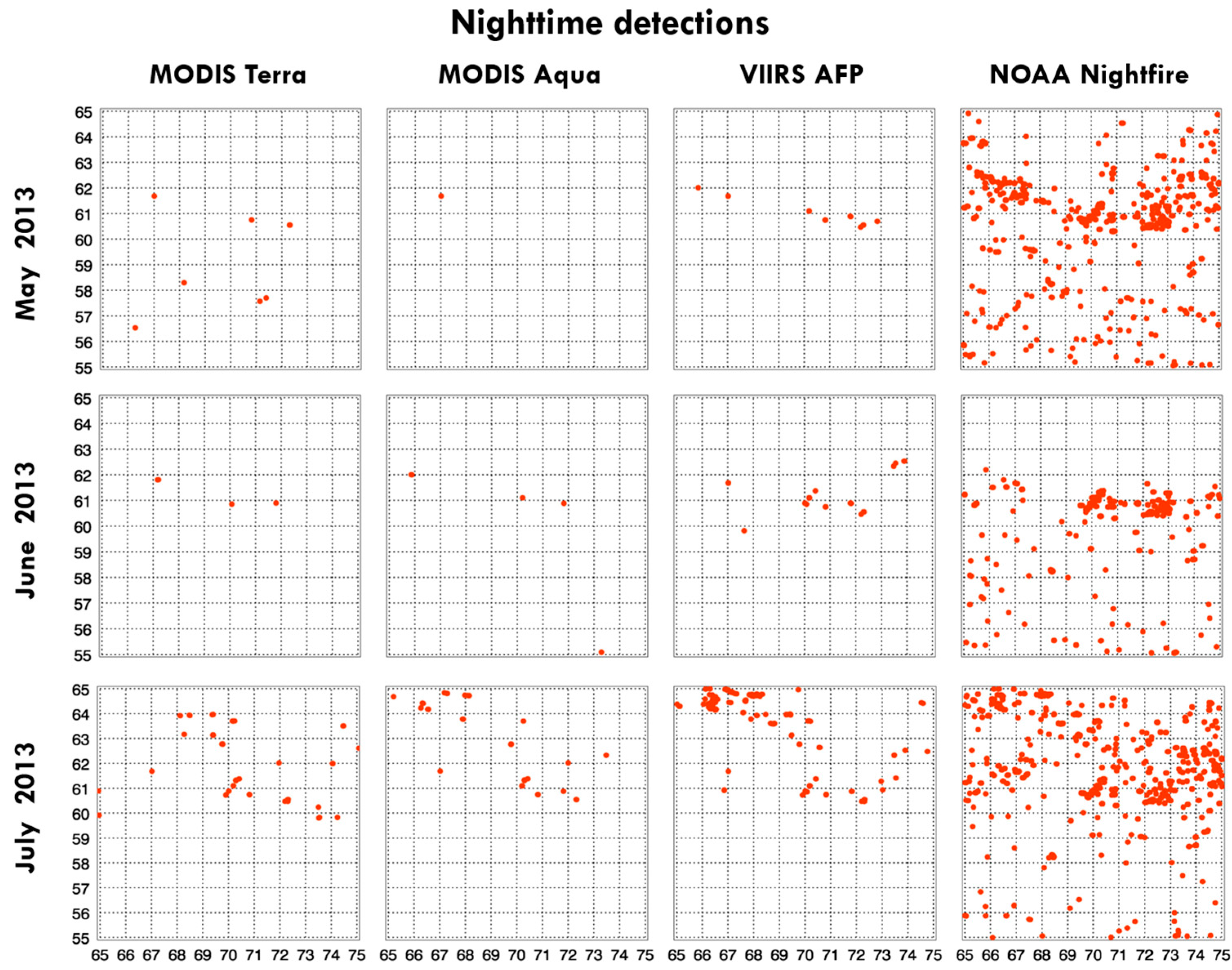
16] were used and marked as valid, and the rest of the detections were filtered. The total number of valid detections within each grid was recorded for each day. For each grid, a frequency counter was also set to count the number of days when clear-sky hotspot activity was observed in it. If one or more valid detections were found in a grid on a given day, a count was added to the counter of the grid. At the end, the grids having at least 15 days, roughly 10% of total days studied, of hotspot activity within them were highlighted as the most probable areas having flaring activity in them.
Following the procedure above, a total of 99 such grids were found, and 75 of those grids showed hotspot activity in them for at least 30 days.
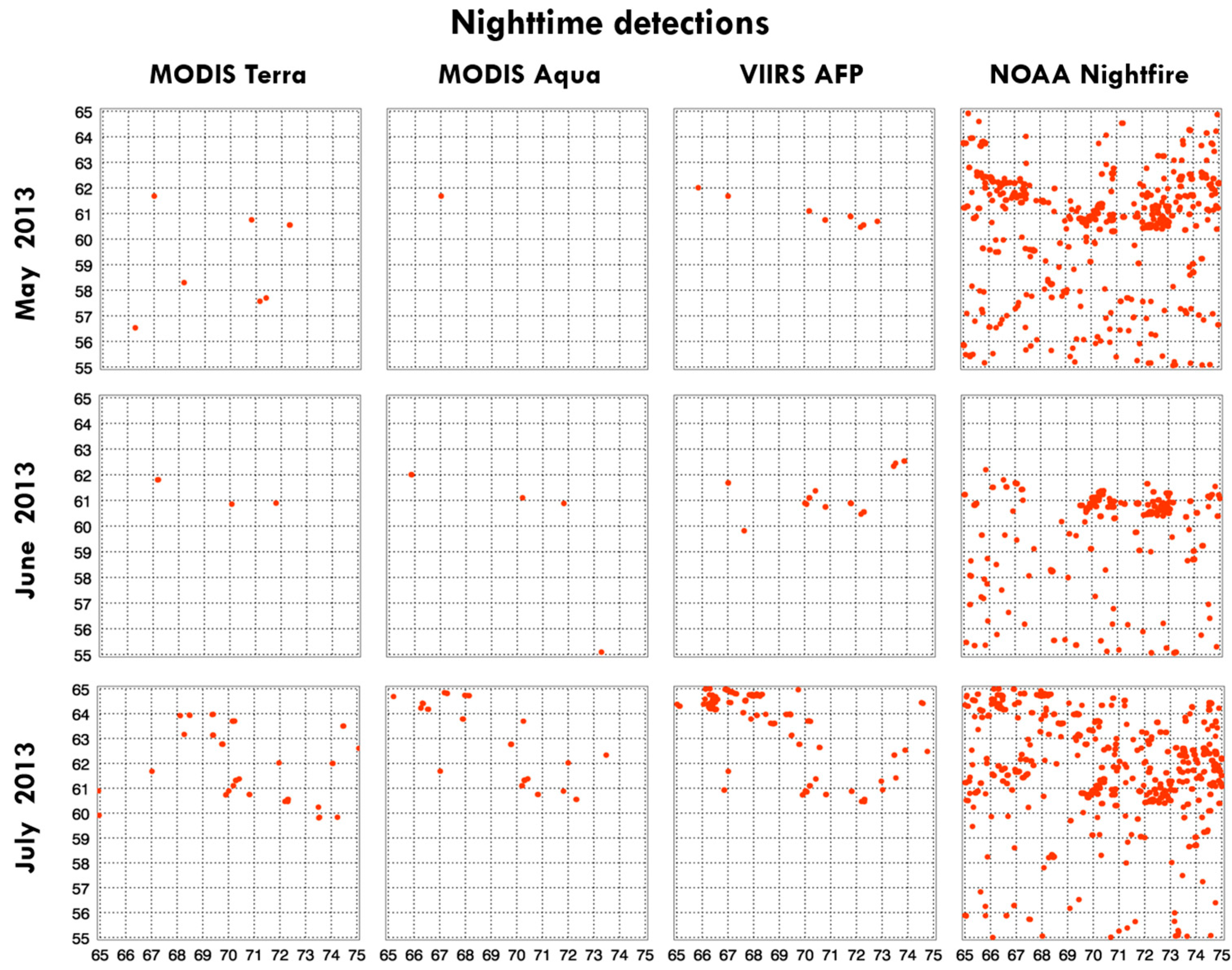
Figure 3 shows these areas as yellow boxes along with detections from MODIS Terra, MODIS Aqua, and VIIRS active fire products during the nighttime for five summer months of 2013.
Figure 3 describes how the detections from various fire products are aligned with the probable flaring areas. A quantitative analysis for these detections is tabulated in
Table 2, displaying the total number of detections by these sensors on a monthly basis within and outside gas flaring regions. As expected and observed earlier in
Figure 2, VNF showed the maximum number of hotspot counts over the entire region, much more than other nighttime products studied. VAFP (following VNF by a huge margin) was found to have a greater number of detections (about five times) than MODIS Terra and Aqua. In terms of alignment with the gas flaring areas, ~47% of nighttime detections from MODIS Terra were found within the gas flaring zones (grids showing persistent, high temperature fire activity), whereas ~67% and ~55% of nighttime detections by MODIS Aqua and VAFP, respectively, were found in the gas flaring zones. It is noted that all MODIS and VAFP do have quite a few consistent detections for numerous hotspots, especially over the upper left corner of the image. Presumably, those spots are fires or pixels that have multiple gas flares, but further study is needed to look into this.
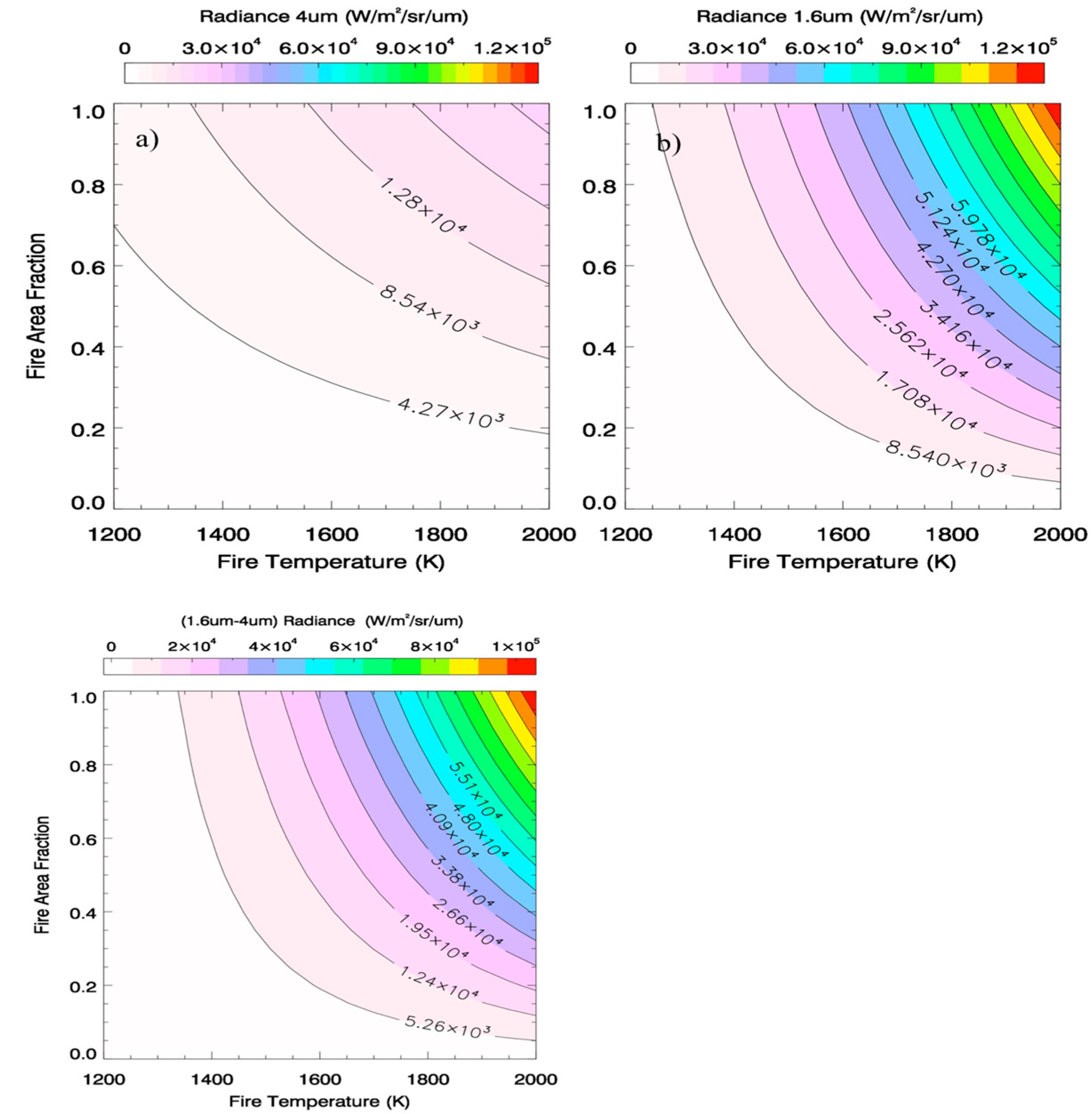
Detection counts recorded in each grid from the VNF product were divided into two categories based on associated brightness temperatures, a) TB (0 < TB < 1600 K) and b) TB (TB ≥ 1600 K), to see how detections from both these temperature ranges aligned with the gas flaring regions, with the latter range representing hotter sources that are characteristic of flares. It also helps in characterizing the hot source type (gas flares, forest fires, biomass burning, etc.) found in the study area along with the spatial pattern of their occurrence. ~77% of the total number of valid detections by the VNF product over the entire study region belonged to category (b) (TB ≥ 1600 K) which indicates the dominance of the flaring activity in the area. About 52% of the detections belonging to category (a) and ~95% of the detections from category (b) were found in the gas flaring zones.
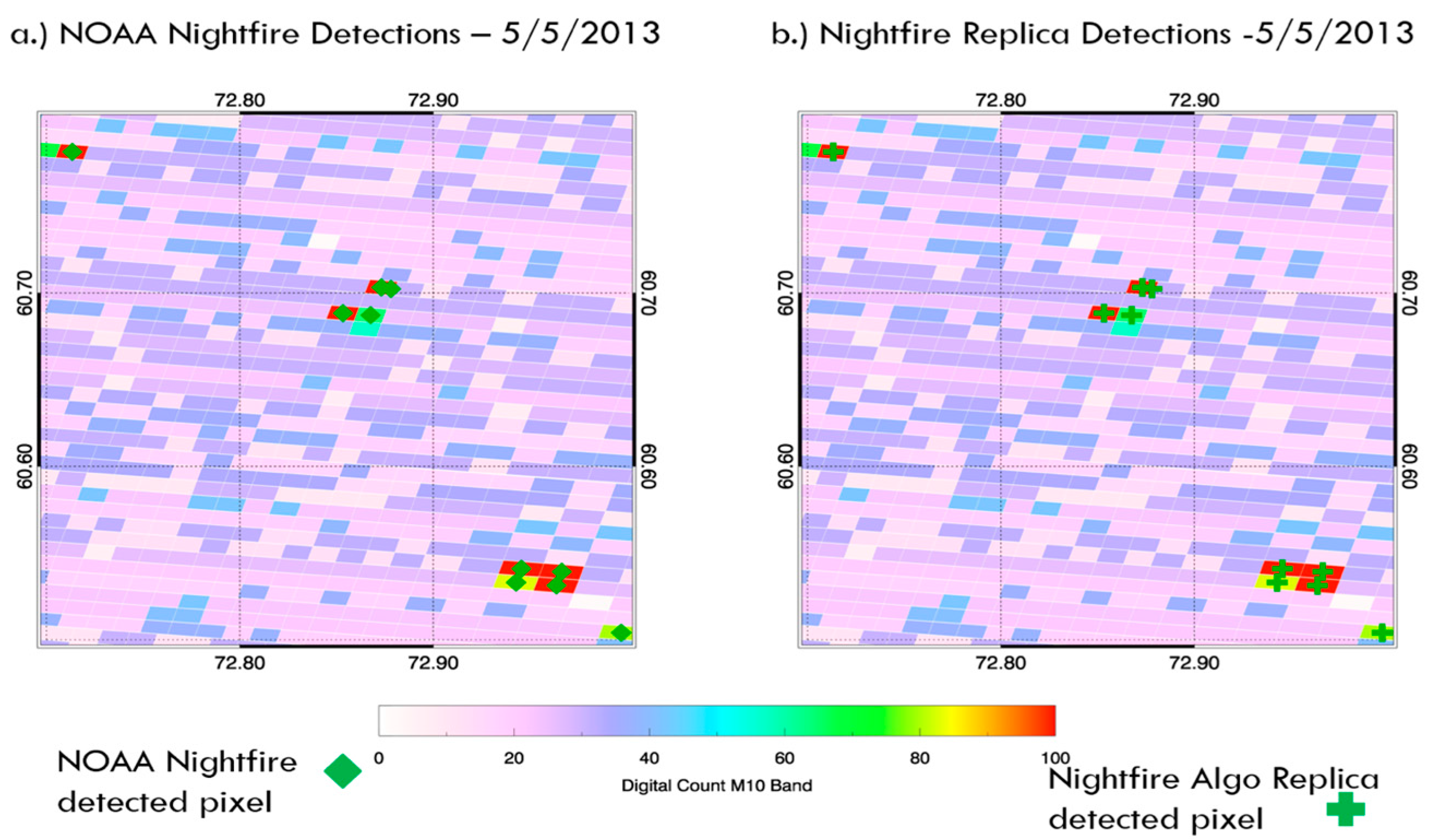
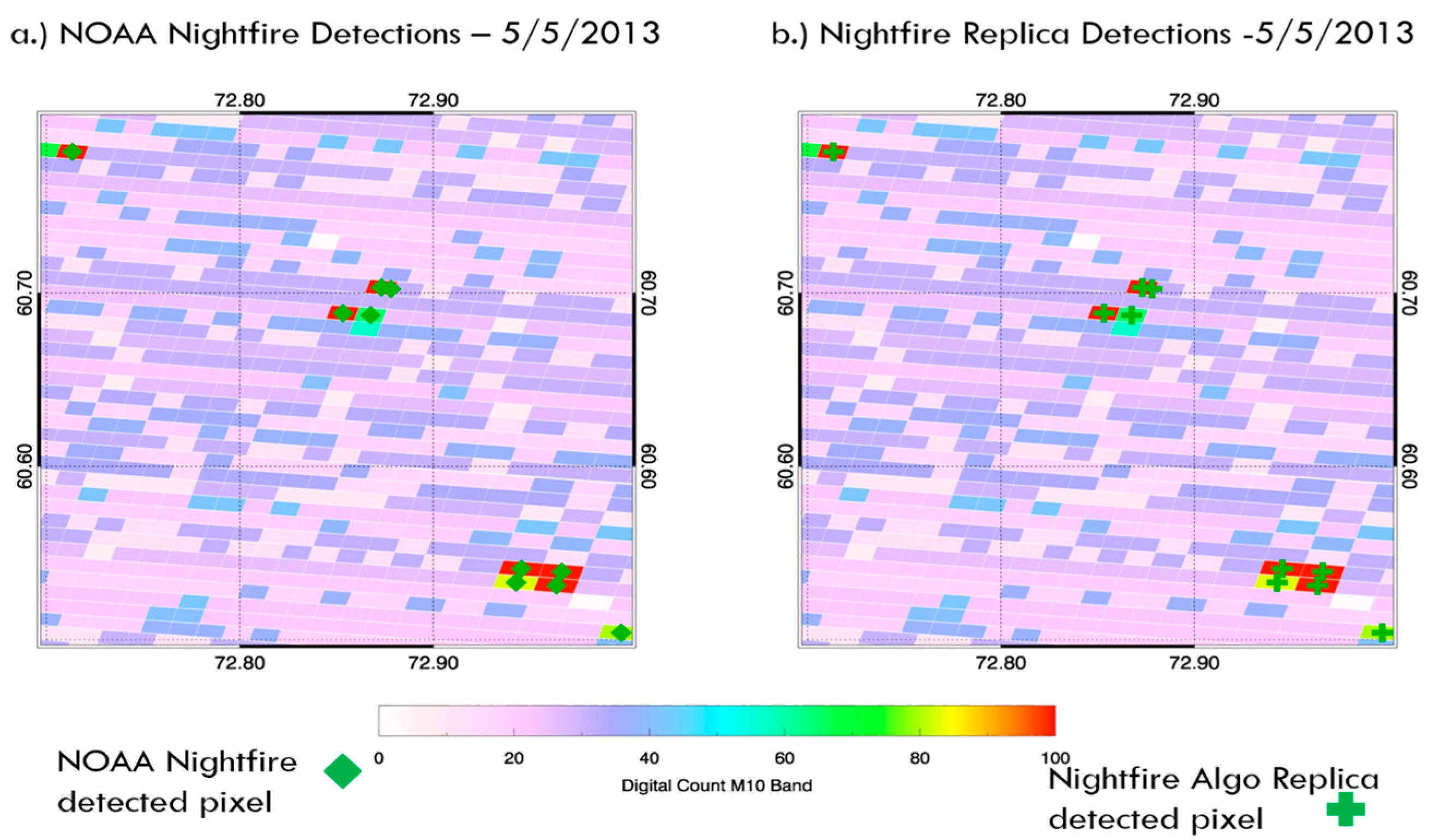
Since the fire activity estimated by the VNF product was astoundingly much more than other official fire products like VAFP, MOD14, and MYD14, we decided to look deeper into the VNF product to comprehend its functioning better and also to see how the differences could be better appreciated and reconciled. The next section therefore details the NOAA VNF algorithm, its comprehension and replication, and an approach to understand the underlying basis of the vast differences in the monitored fire activity.
5. Evaluation of the Night-Fire Product for Characterizing Gas Flaring
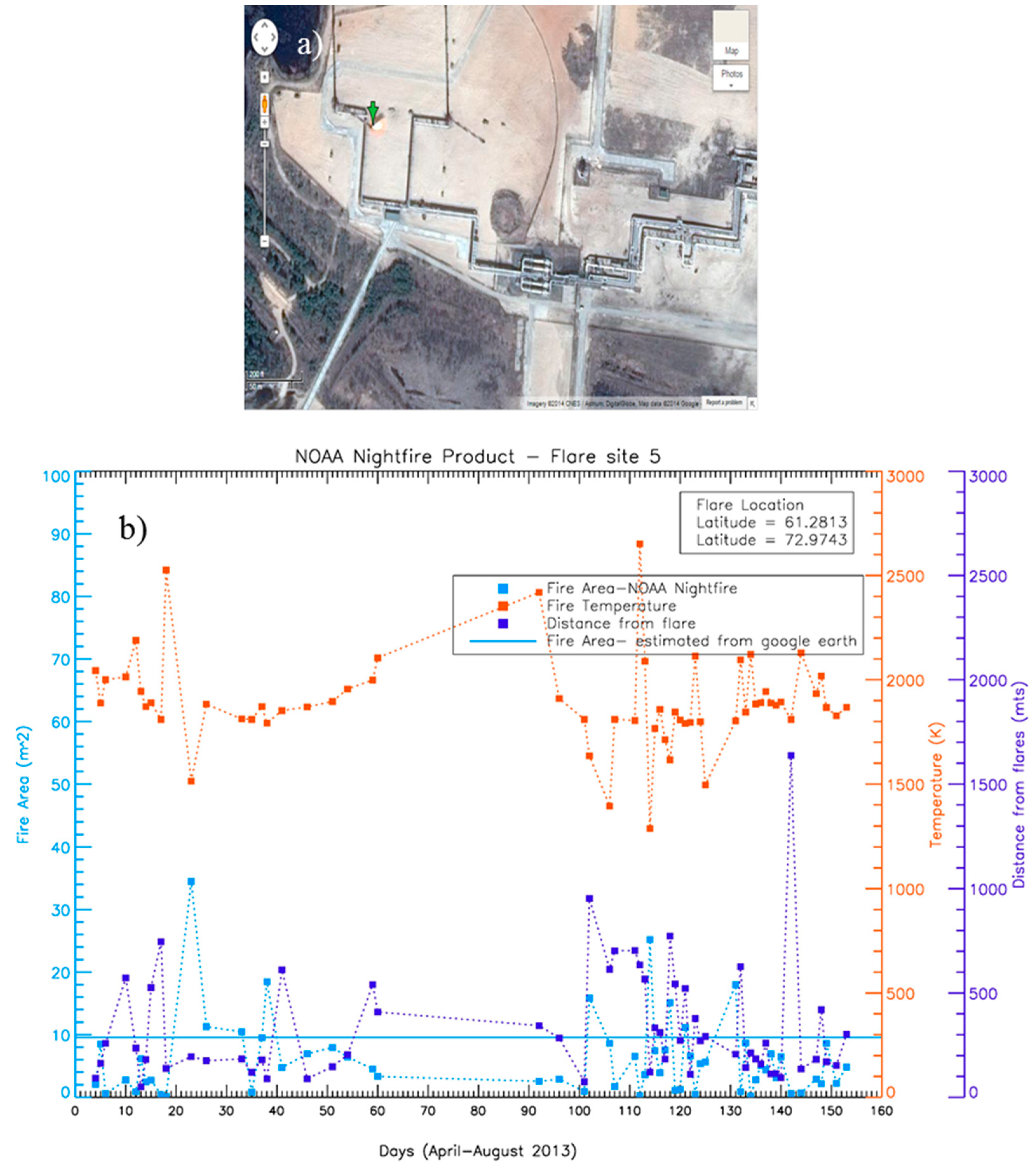
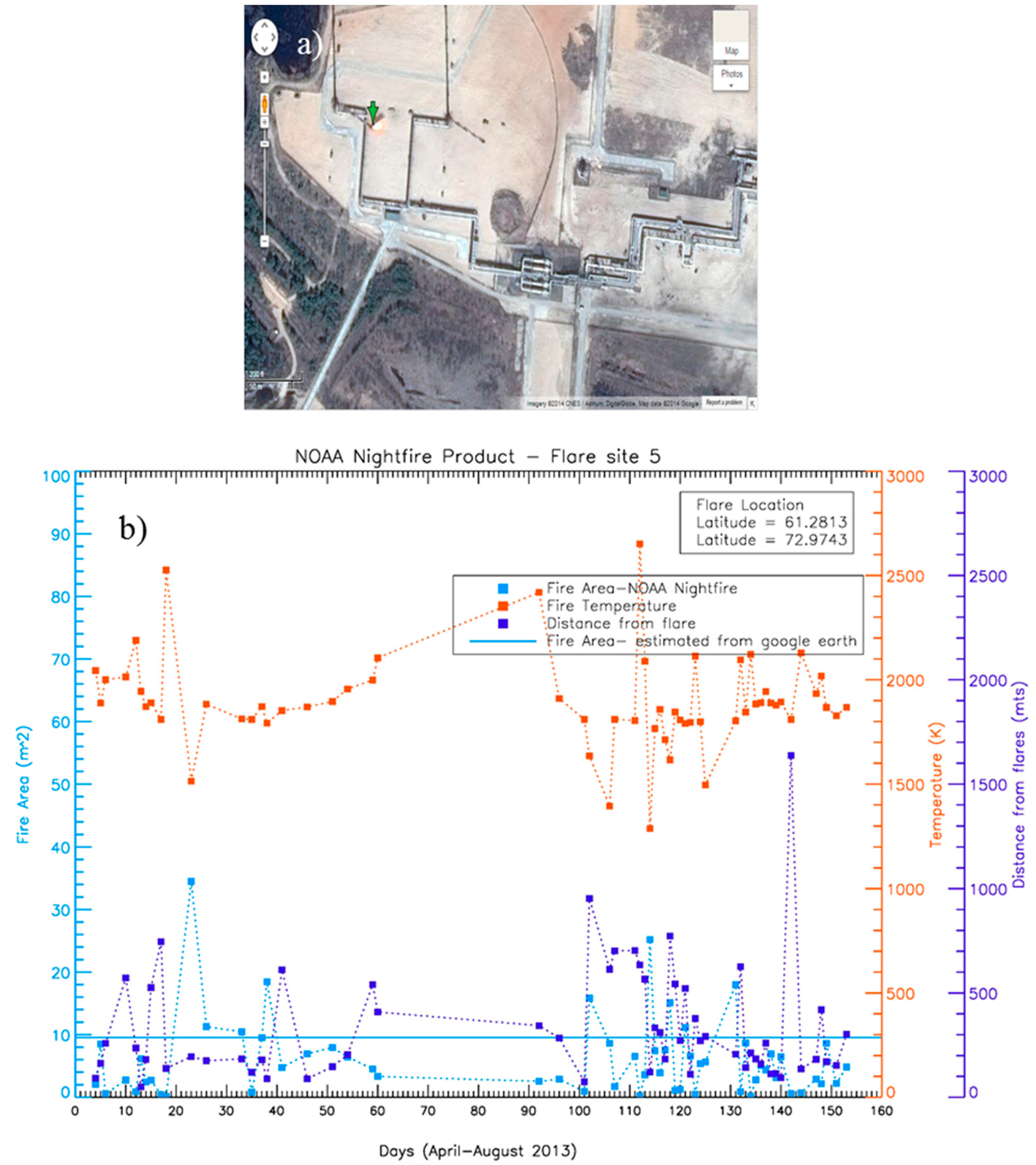
Since the VNF product is proved to be more effective than other active fire products in detecting gas flares by a considerable margin, we analyzed the collected data (April–August 2013) for further evaluation and validation. We chose ten foreknown gas flaring locations from Google imagery within the test region boundaries and studied the efficacy of detecting these flares by the product. All the sites were detected many times by the product within the footprint of VIIRS level 2 imagery pixels. The detections where the distance between the pixel center and the flare location exceeded 3 kilometers were discarded and deemed as invalid. Many attributes such as fire area, fire temperature, viewing geometry, radiant heat, radiances in multiple bands, and distance from actual flare location associated with valid detections (distance < 3 km) were stored in a database for further evaluation. The database was created for all ten different gas flaring sites.
Figure 8a shows one such site (Google Image) in Khanty-Mansiysk, Russia, and
Figure 8b shows the days of valid detections by the VNF product within the study period along with fire area, fire temperature and distance from the flare.
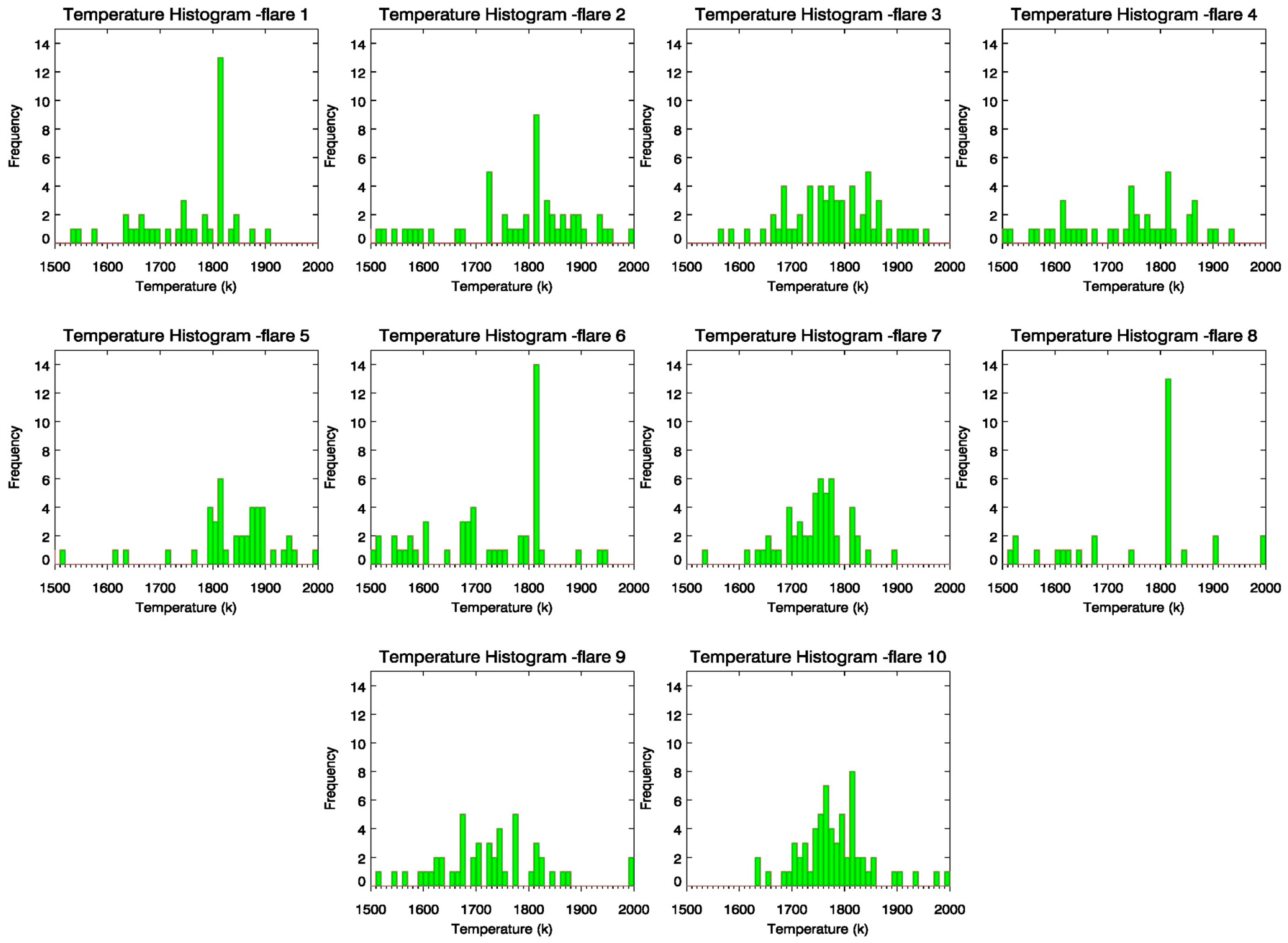
Table 3 shows the locations of the predetermined flare sites, the number of times VNF successfully detected them over a period of five months, along with the mean area, temperature and distance of detection (the Euclidean distance between the flare site and the center of the nearby pixel showing a hotspot). It can be noted here that for almost all the sites, the associated mean temperatures reported by VNF are very high (1600–2000 K). These high mean temperatures corroborate this product’s potential of detecting flares burning at extremely hot temperatures with consistency over a long period. The histogram analysis (
Figure 9) of temperatures reported for valid detections for all flaring locations under study also exhibits that high temperatures are most frequently associated with these detections.
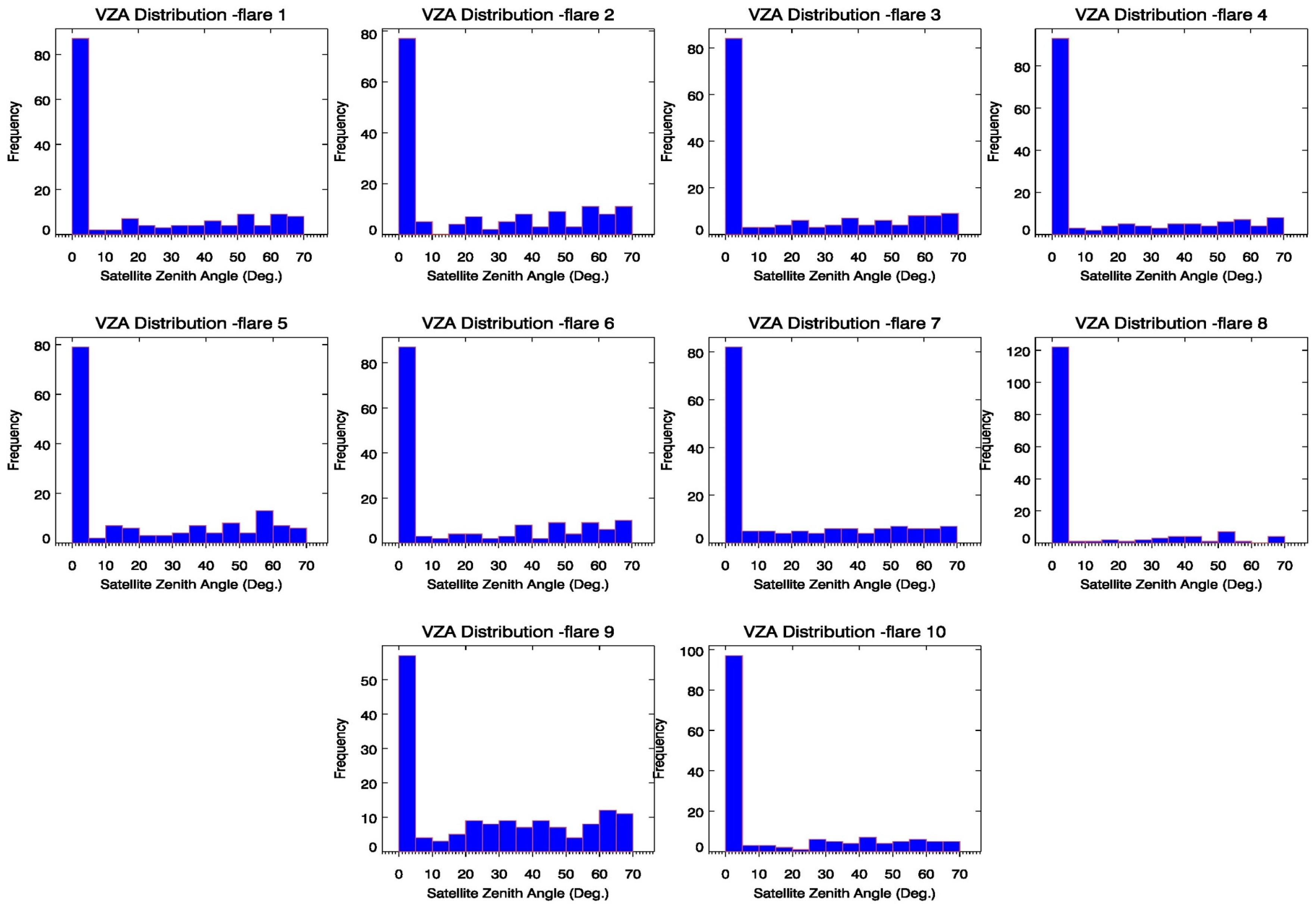
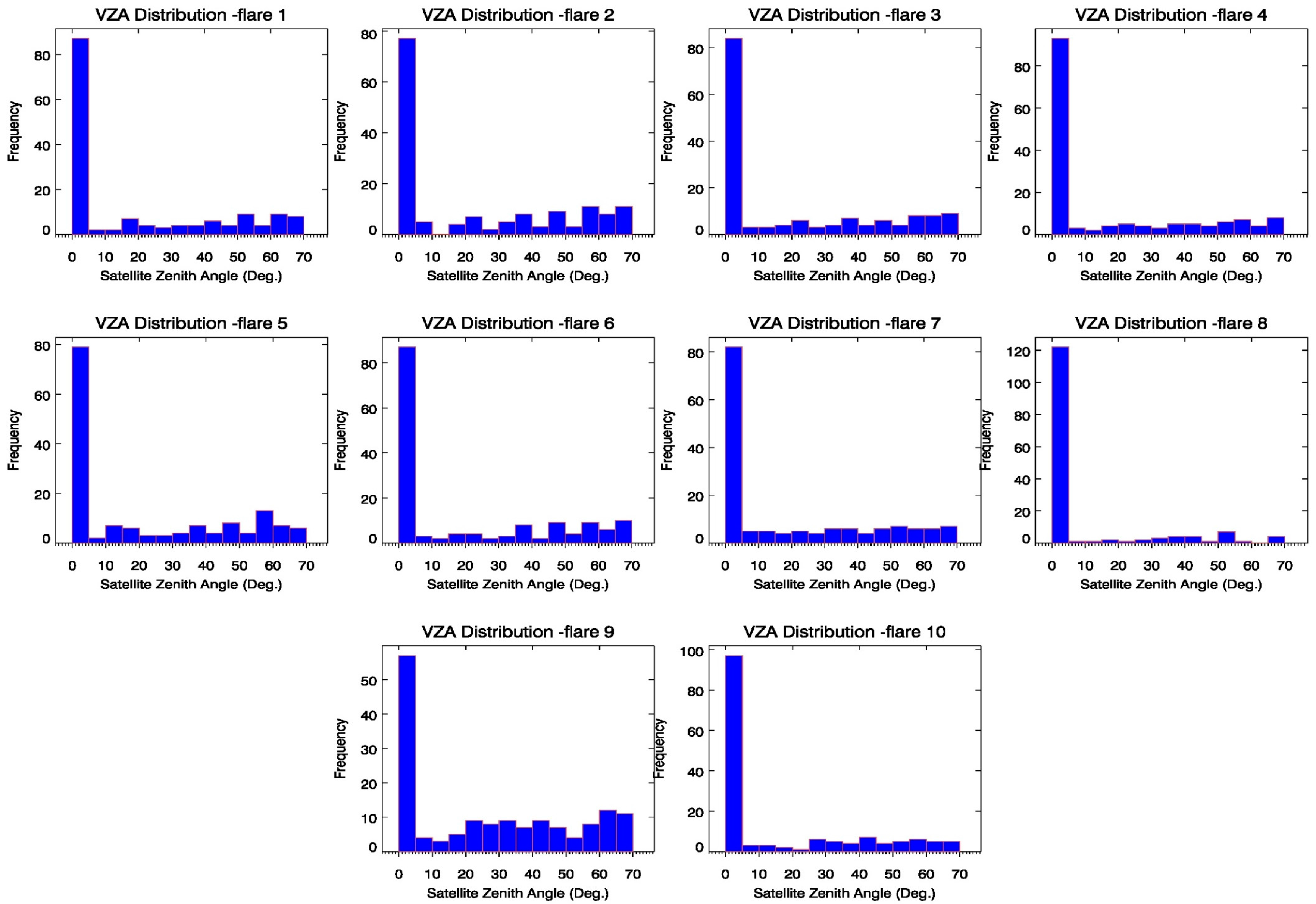
Another particular feature is the observation of the view zenith angle, VZA (the angle between local zenith and the line of sight of the satellite) associated with valid flare detections (
Figure 10). A histogram of VZA shows that most of the detections are made between 0° and 5°, which means that these flares are detected when the satellite overpasses are either directly overhead of the flares or near local nadir. A plausible reason for this observation is that the small size of the flares (the flare area as reported by the VNF product is usually <50 m
2 compared to the VIIRS level 2 data pixel size of 750 × 750 m at nadir) makes them hard to detect when seen over a large angle by the satellite instrument. Since flares are mostly found over flare stacks (columns constructed for safety purposes) and are not spread out on the ground like biomass burning or forest fires, the fire area reported is generally confined to the area around the periphery of the flare stacks.
We also verified the fire areas reported by the VNF product for flares under study with the Google imagery. Triangular areas were drawn around the flare stacks over zoomed in Google Images to show foreknown flare locations and to approximately calculate the areas around the flares. It should be noted these are conservative estimates of fire areas for flares and are not representative of exact flame areas, as the flame size depends on various factors like wind speed and fuel burned. Therefore, deducing flare areas from flames is not very reliable. Verification of these areas could not be done for two locations of the flares because of the limitation of the available zoomed in Google imagery there.
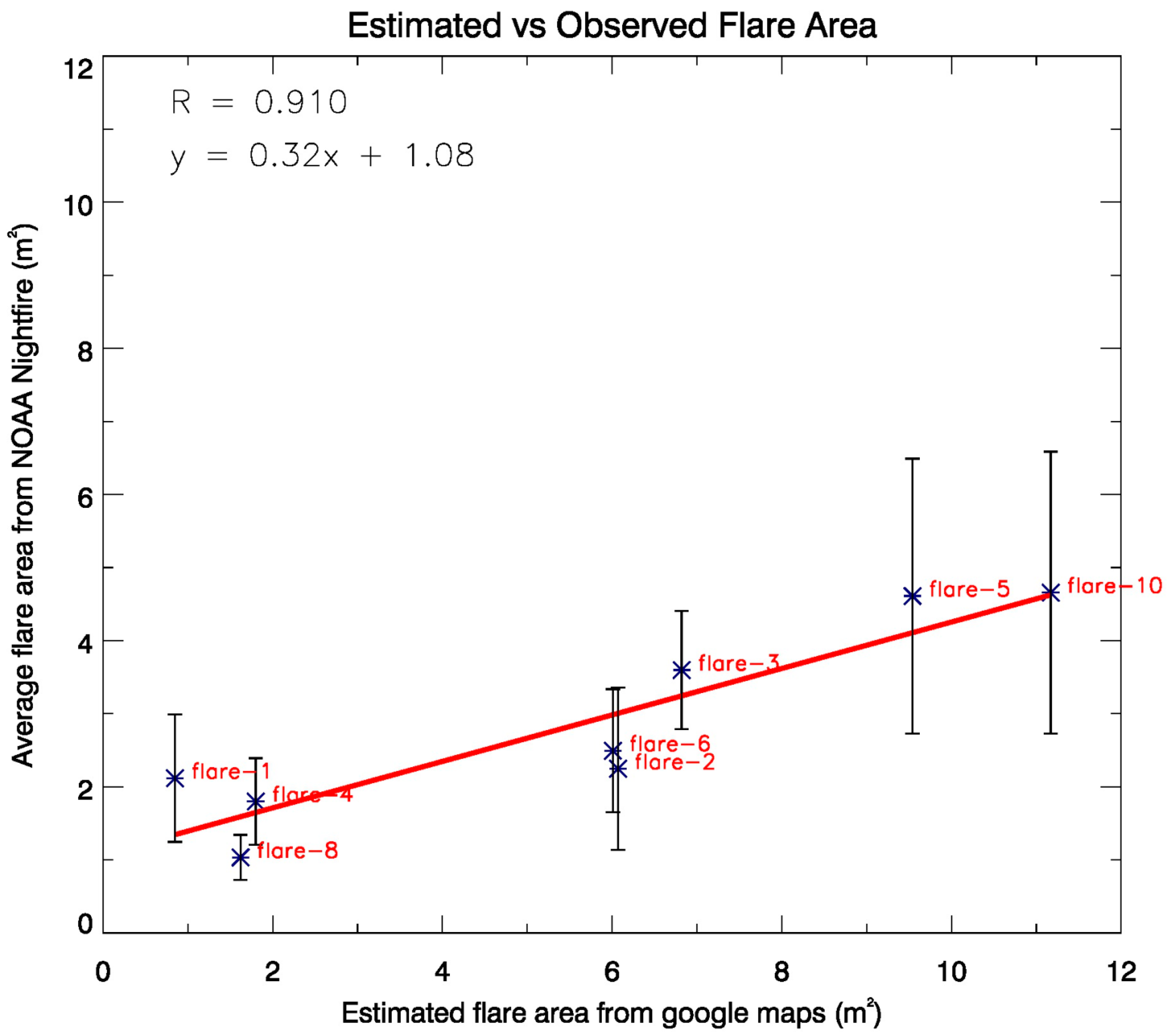
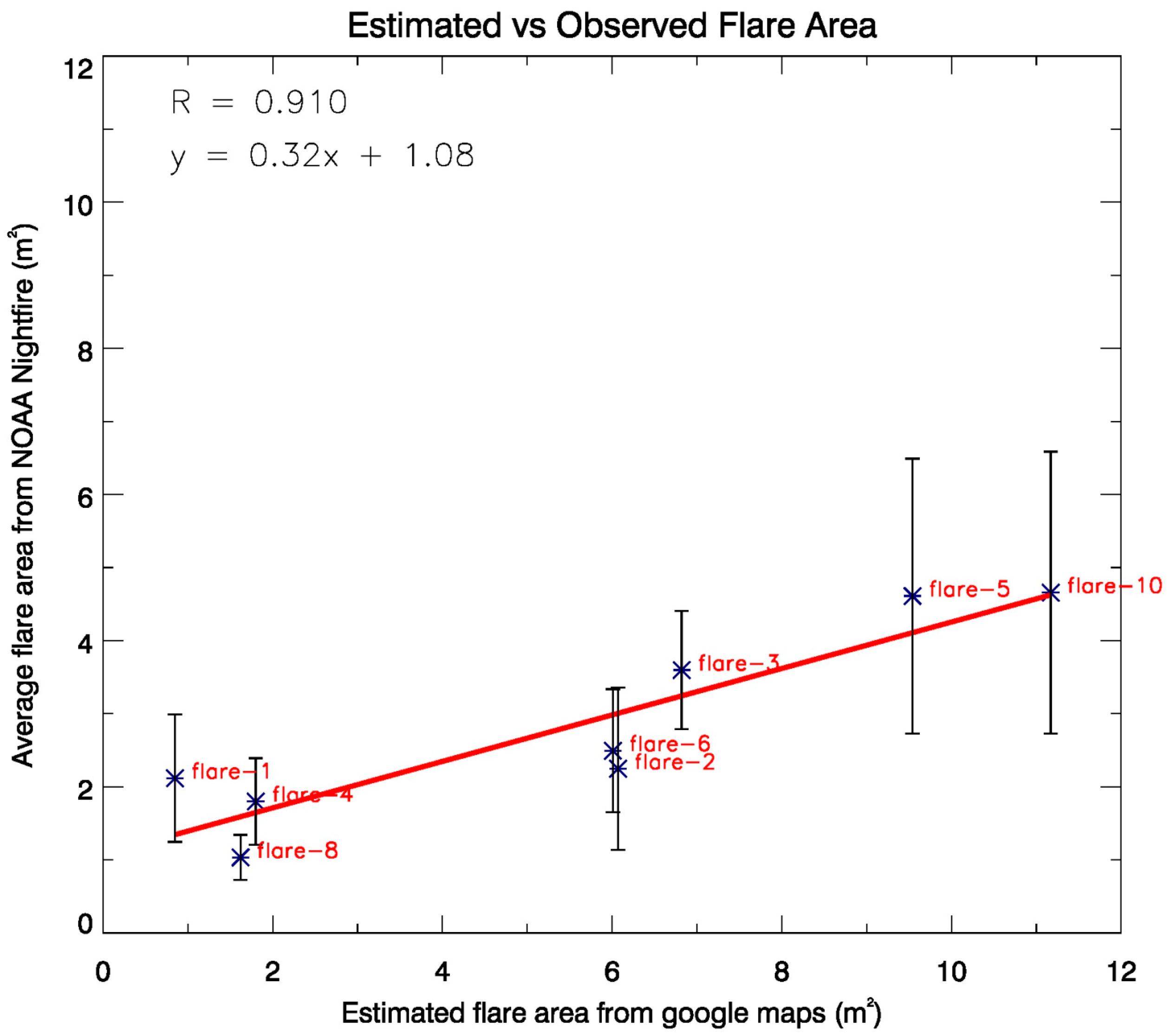
Figure 11 shows a scatter plot of the comparison between the mean of the areas reported by VNF and the area estimated by Google imagery. In order to remove the bias from the outliers for mean area calculations from the VNF product, the interquartile range (
q0.25–
q0.75) of all reported areas was used. The mean and the standard deviation were calculated using the data in this range only. The scatter plot shows a correlation of 0.91 between the imagery estimated and VNF areas, however, VNF is found to underestimate the areas of the flares.
6. Summary and Discussion
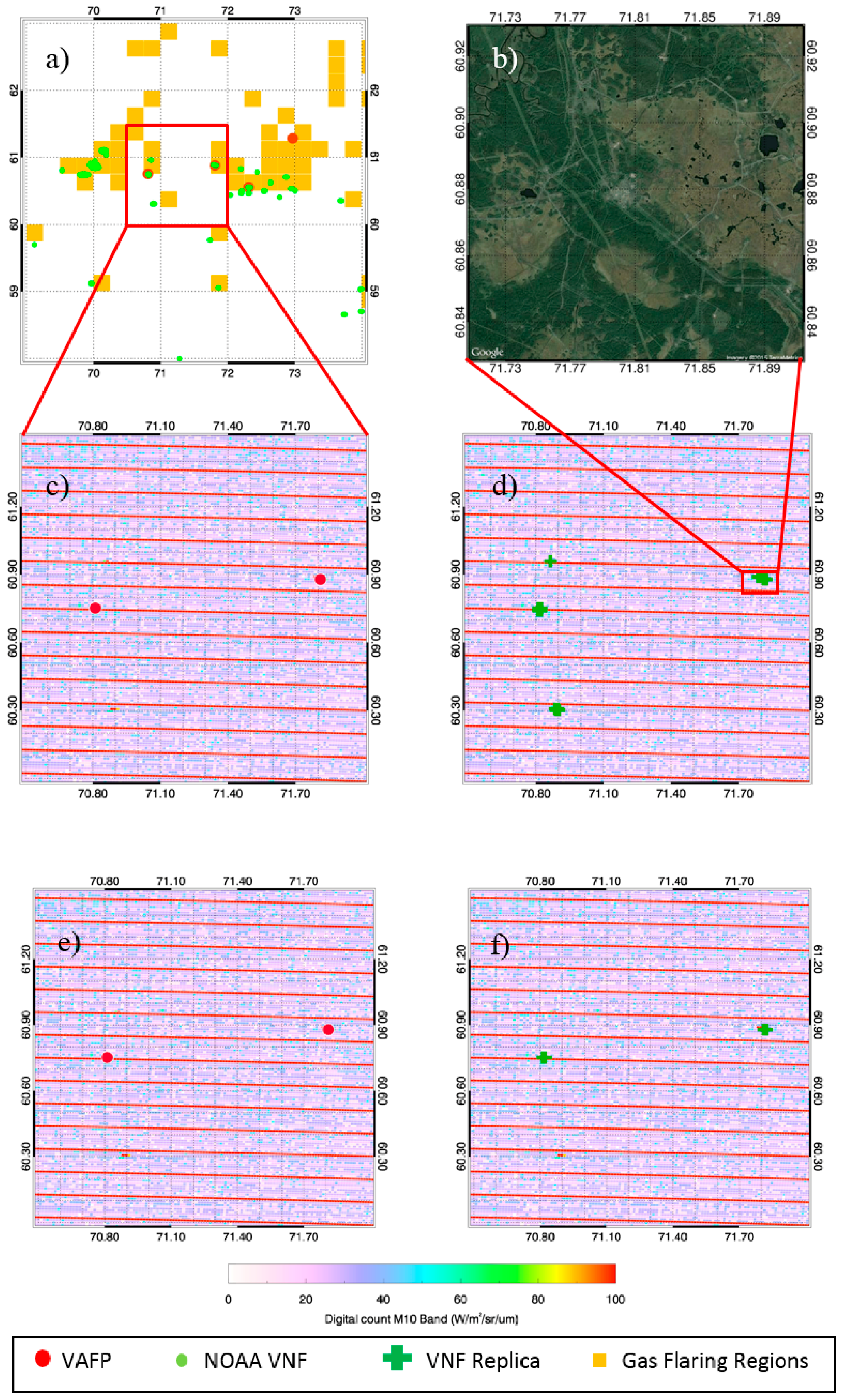
The VNF product was studied for the summer months of 2013 (April–August) in the Khanty-Mansiysk Autonomous Okrug, Russia along with other standard fire products. The fire activity was contrasted and compared for the same period with other fire products such as MOD14 (MODIS Terra land level 2 data), MYD14 (MODIS Aqua land level 2 data), and VIIRS Active Fire Product (VIIRS level 2 data). A broad gas flaring map was made highlighting grids in the target region showing the most persistent flaring activity using VNF data. The results revealed that fire counts observed by the VNF product were way higher than the other products both in and outside of gas flaring zones, with the counts observed by VAFP coming a distant second. The large differences were attributed to the choice of primary detection bands and thresholds involved. The VNF algorithm was replicated using multispectral level 2 VIIRS data to better understand its functioning. Case studies attempting to reconcile the differences between VNF and VAFP showed that the VAFP was able to detect flares but only those with very high M10 DC counts (or high radiance).
Upon increasing the M10 based thresholds manifold for hotspot detection, the VNF replica was able to match VAFP detections. The factor by which thresholds for VNF need to be multiplied to match with VAFP is variable. Smaller flares tend to be picked up by VNF but are not detected by VAFP. In order test the efficacy of the VNF product to detect flares over a longer period of time, the product was tested on pre-specified flaring locations for a period of five months. The product did sufficiently well with detecting all the pre-determined flares with frequency touching as high as 40% of the days tested. A database was also created using data associated with the detections by the product. The database included information on viewing geometries, brightness temperatures, fire areas, multispectral radiances, etc. Some of the peculiar features of flares shown by the data from the database demonstrated that the associated temperatures detected were consistently higher than 1600 K almost all the time. Also, a large number of valid detections seemed to have a viewing zenith angle preference of <5°, which tells that the satellites are almost overhead of the flares most of the time they are detected, their small size being the most plausible reason. The small size of the flares was consistently observed from the VNF as well, and on comparison with areas estimated manually from Google imagery, a good correlation of 0.91 was found between the two. It was also observed that VNF generally underestimates the area of the flares. It should be noted that the area estimated manually is not fully accurate and is a conservative estimate derived by drawing polygon boundaries around the flare structure. However, VNF is among the first that shows the capability to characterize the gas flaring areas from space with good accuracy.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}