
An Integrated Convective Cloud Detection Method Using FY-2 VISSR Data


Abstract
:1. Introduction
2. Threshold Determination and Detection Process
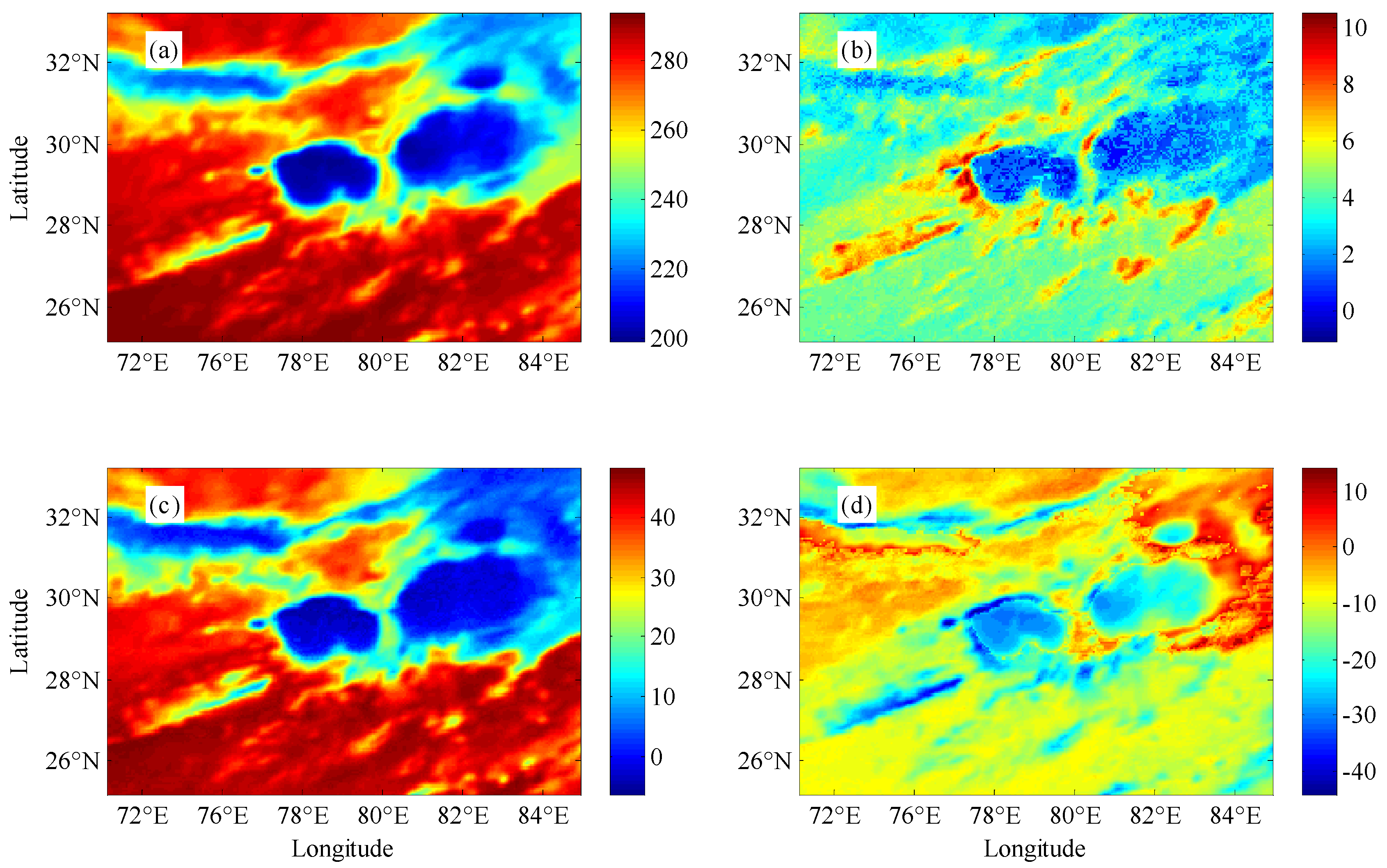
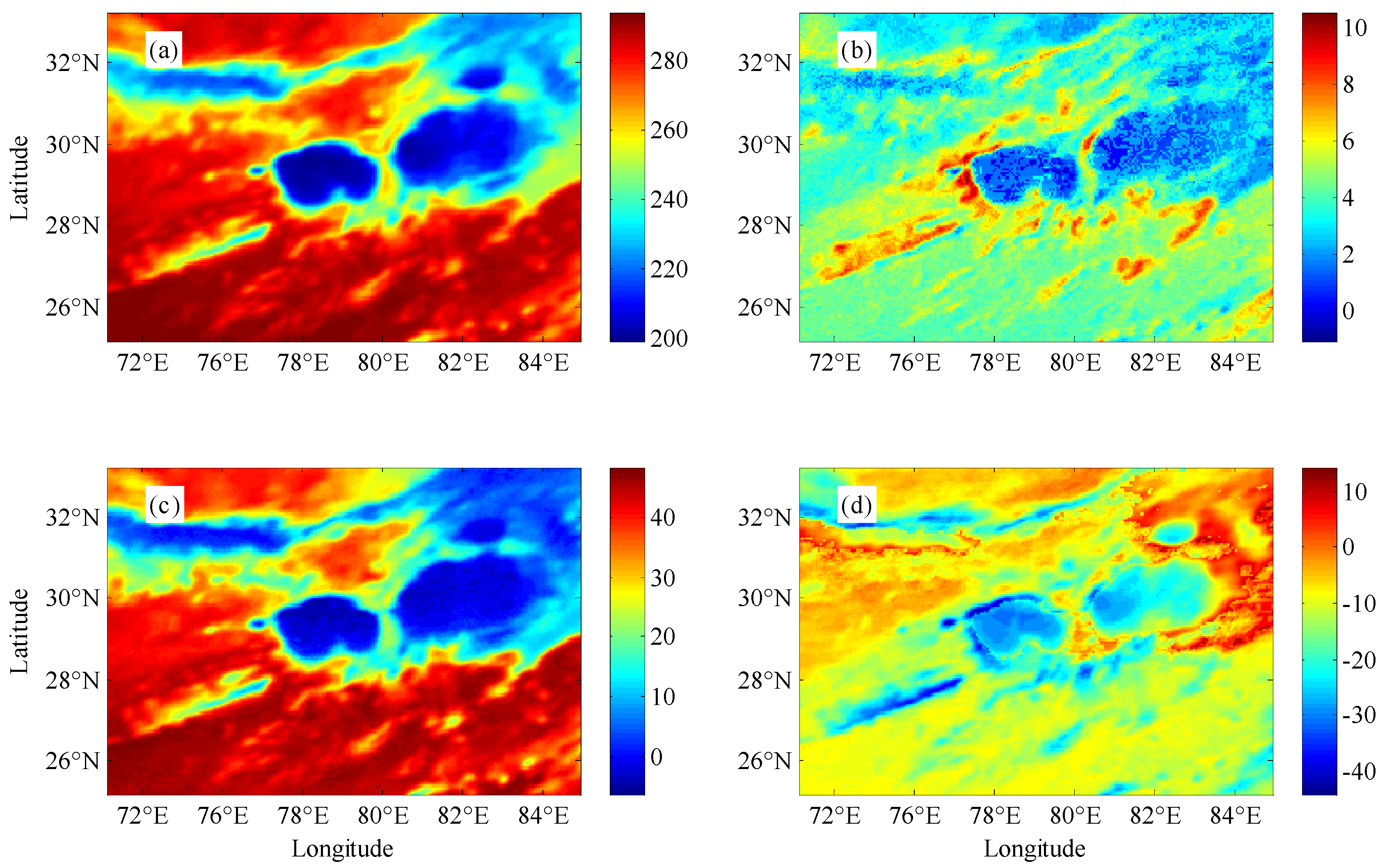
2.1. Threshold Determination
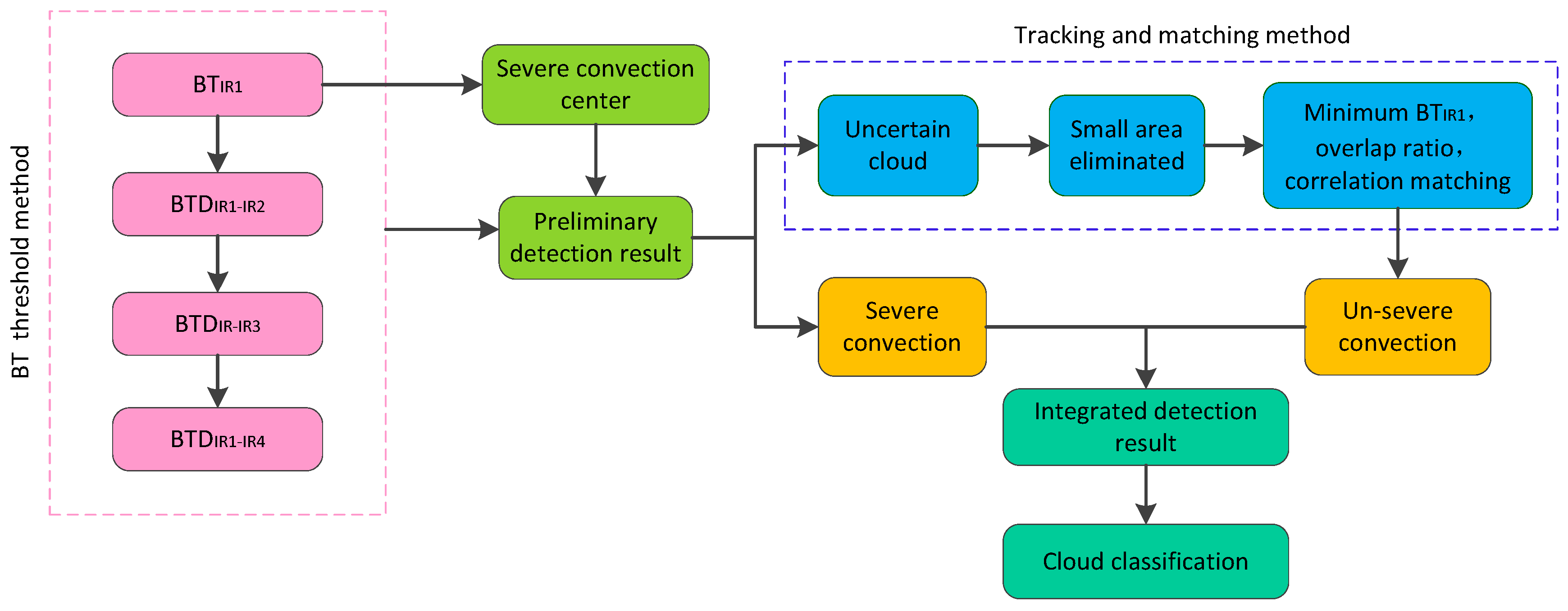
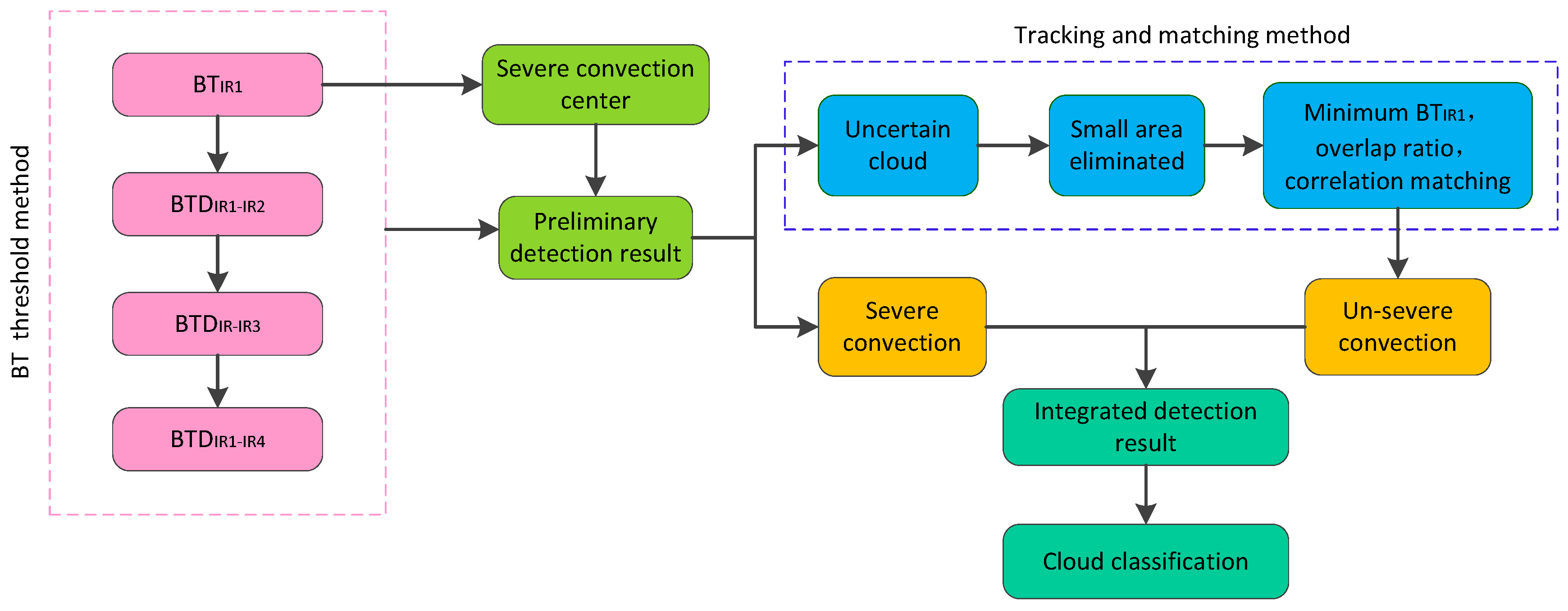
2.2. Detection Process
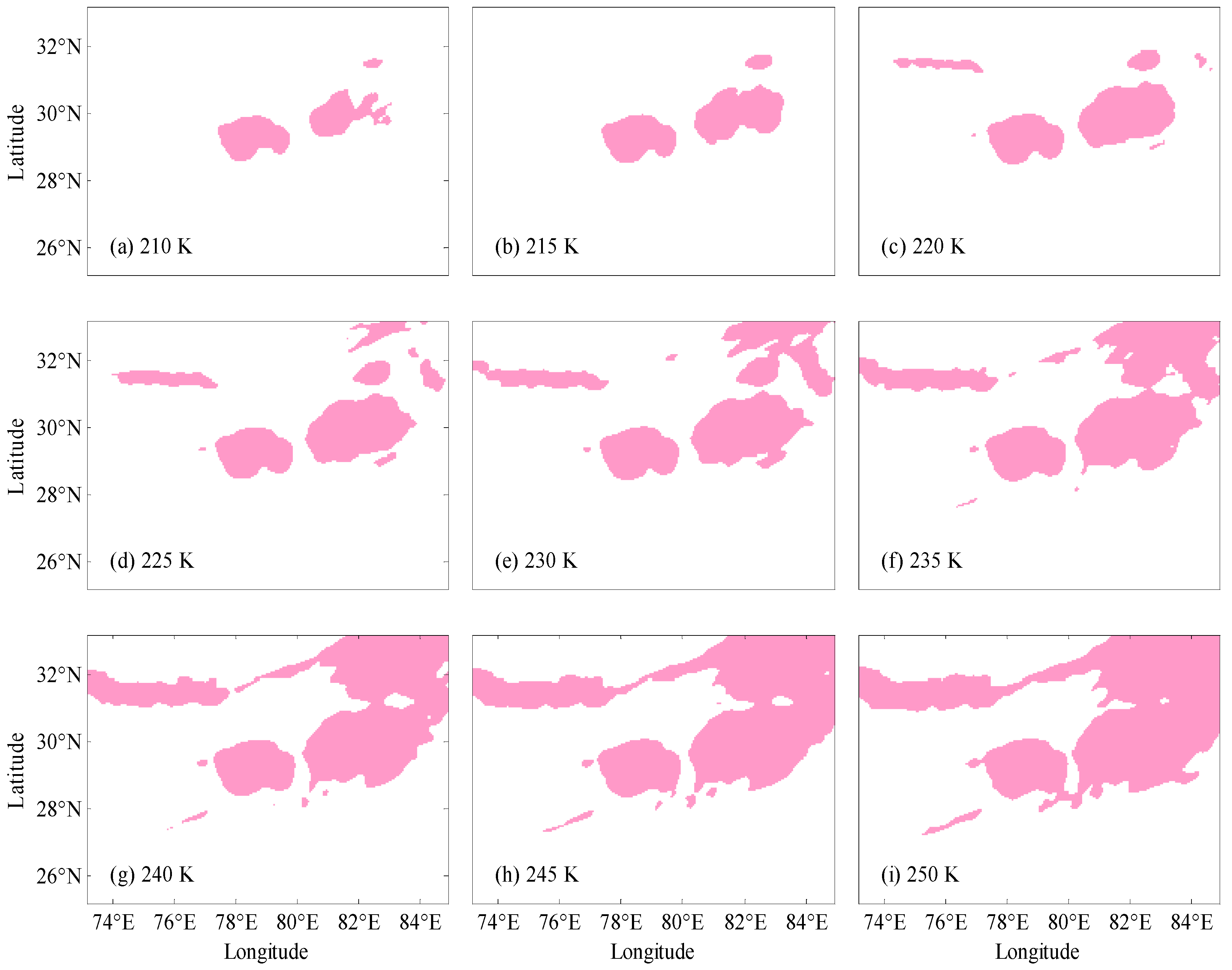
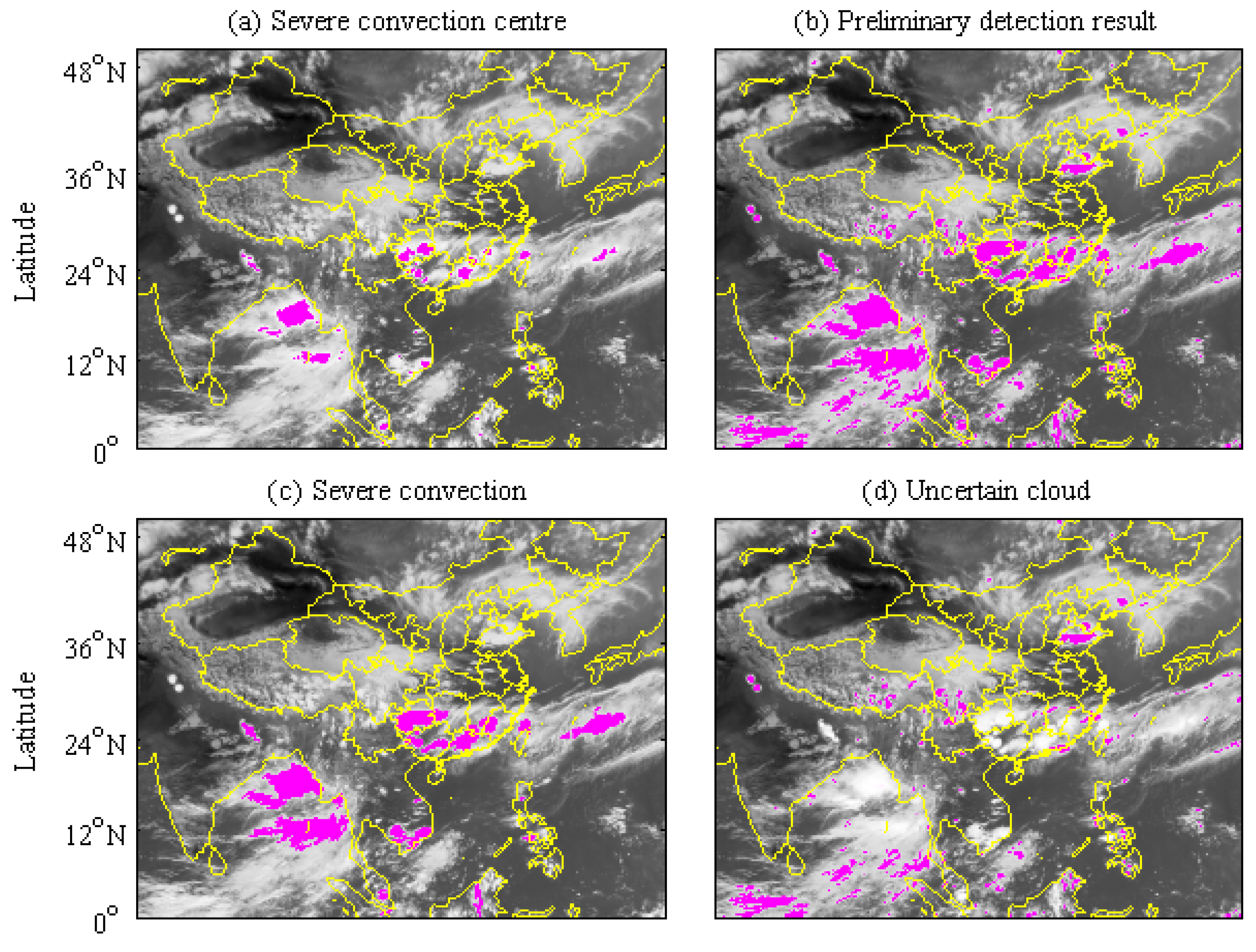
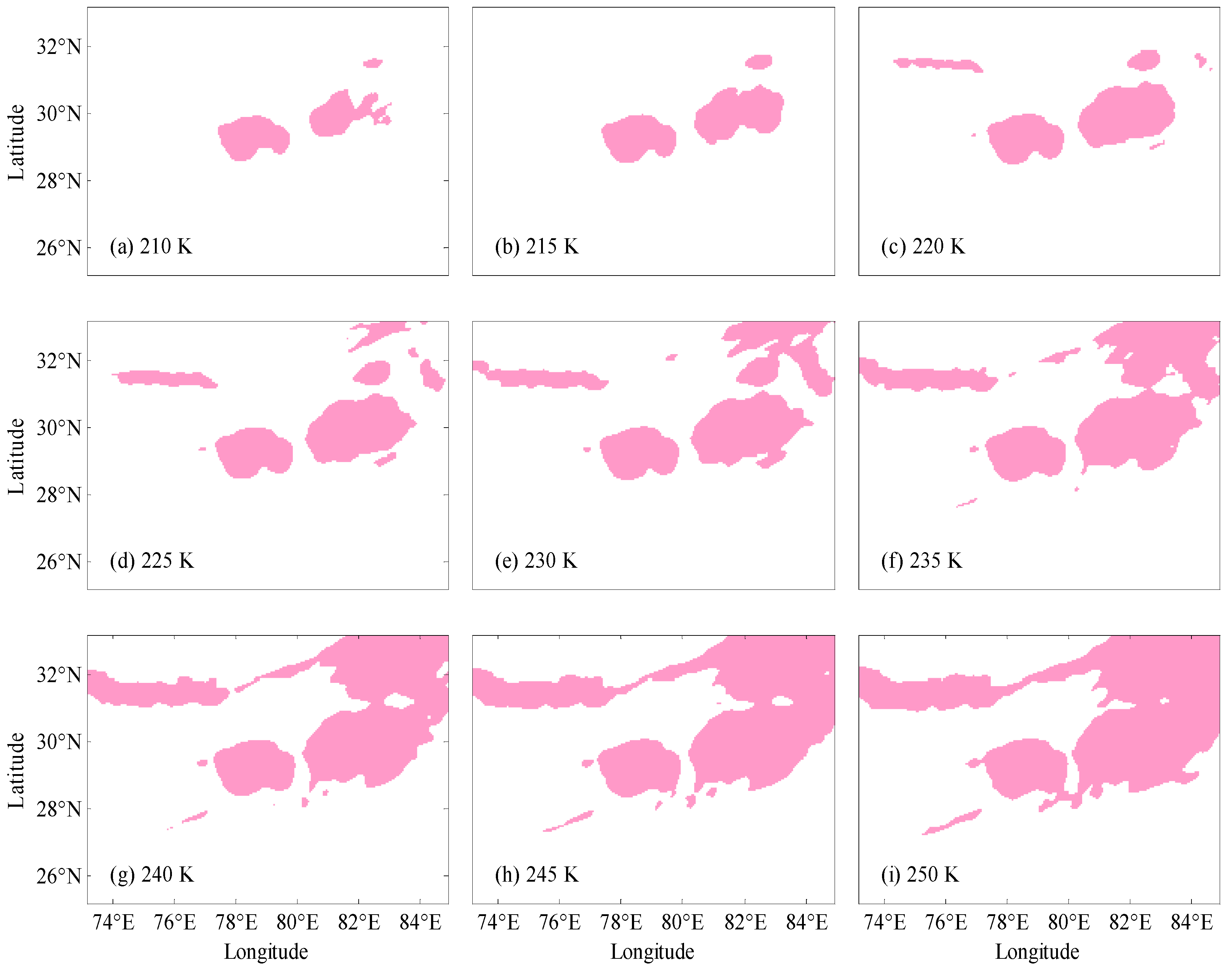
- Step 1: detect severe convection center by employing 220 K as the BTIR1 threshold.
- Step 2: detect preliminary convective cloud by employing 240 K as the BTIR1 threshold.
- Step 3: eliminate non-convection area by employing 4 K, 10 K and −16 K as the threshold of BTDIR1–IR2, BTDIR1–IR3 and BTDIR1–IR4, respectively.
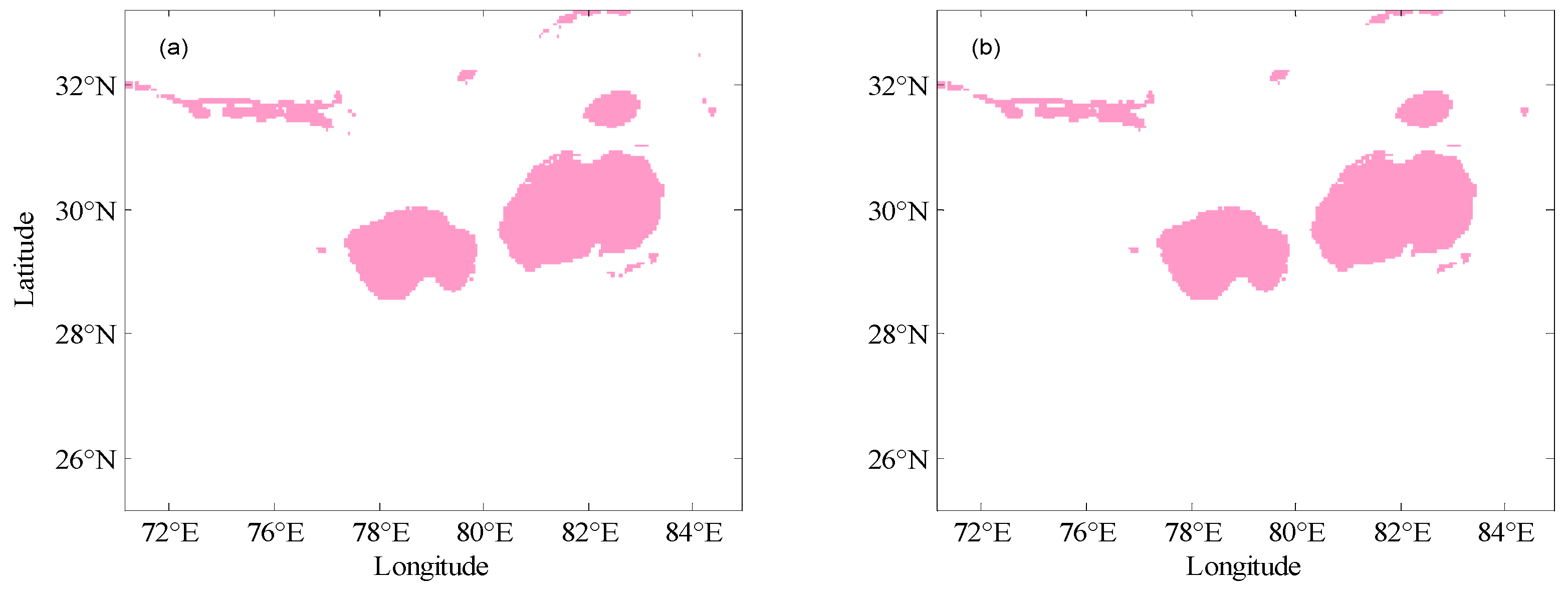
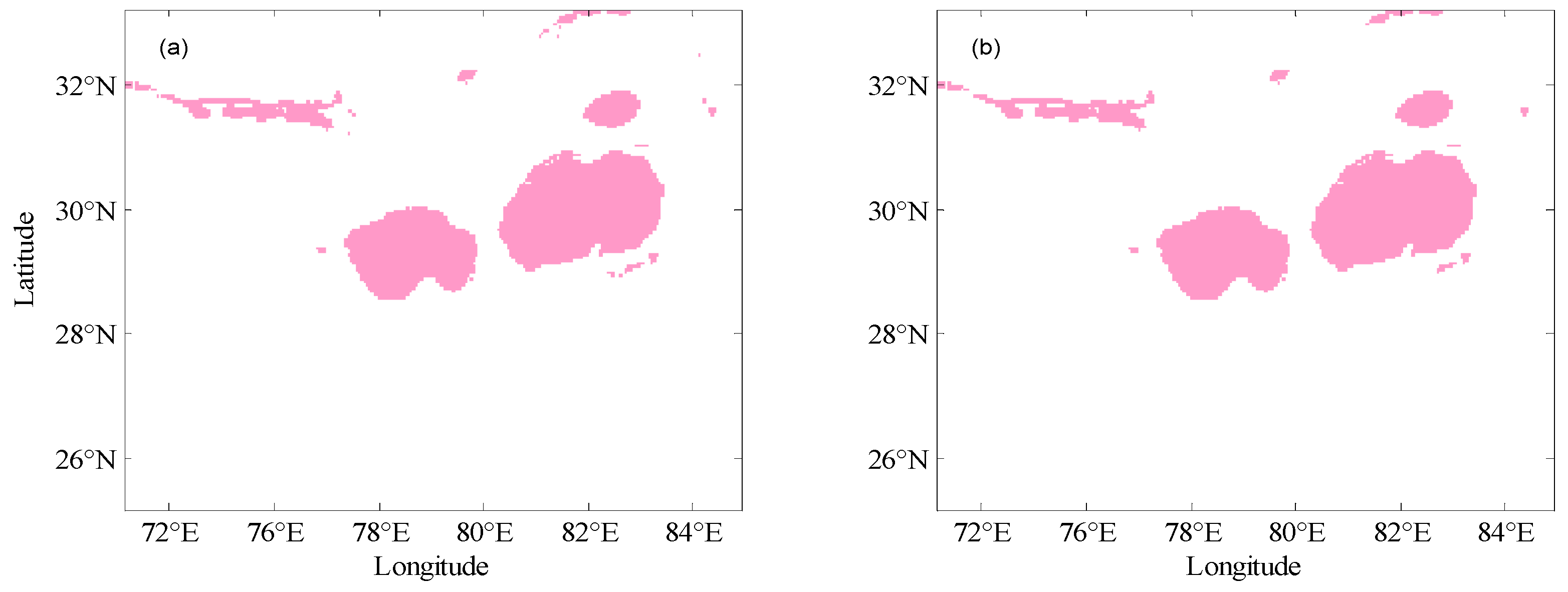
- Step 4: matching the convection center with the preliminary convective cloud. The cloud cluster will be retained if it contains a convection center, or it will be labeled as uncertain cloud.
- Step 5: eliminate the small area of broken cloud by employing four pixels as the threshold.
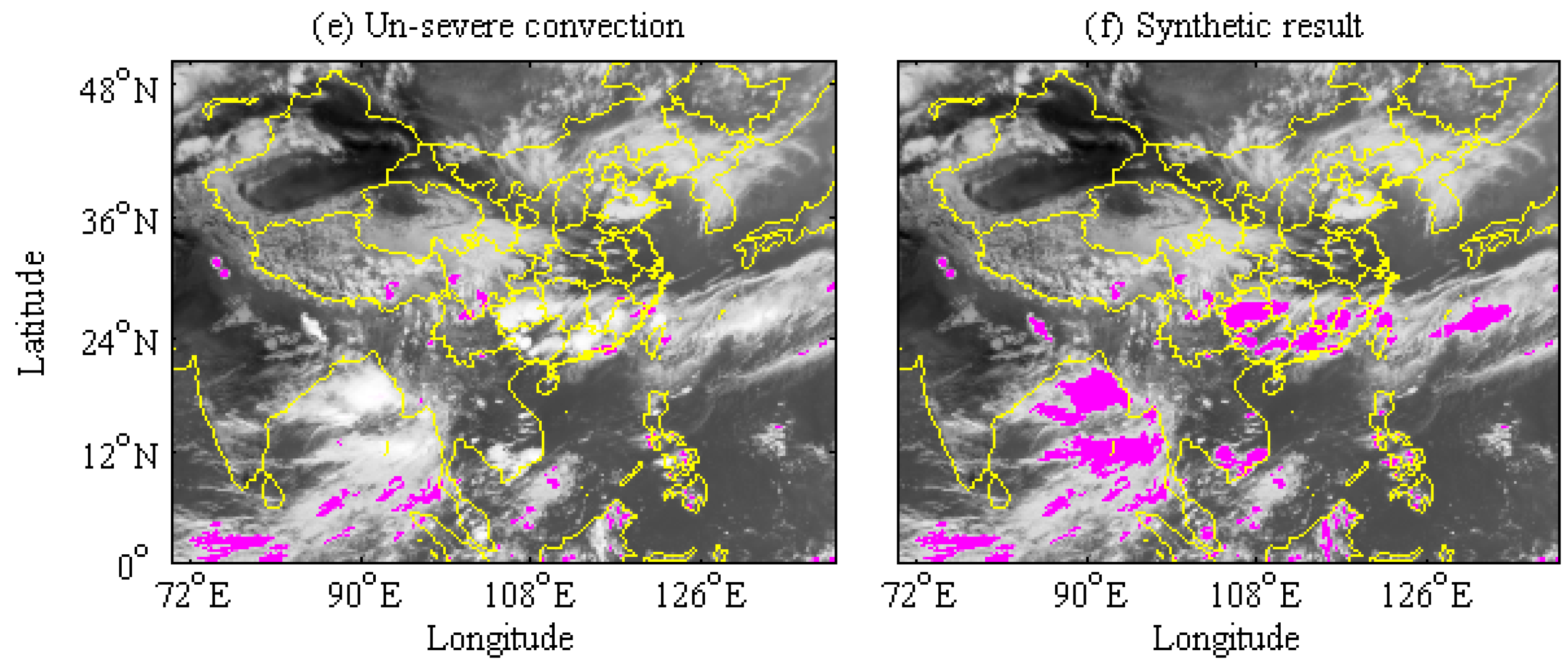
- Step 6: use the same steps above to detect convective cloud an hour before.
- Step 7: tracking and matching the uncertain cloud clusters at the previous time t−1 and the current time t0. Firstly, a grid spacing of and the central position P(i, j) is used to express the space range of the uncertain cloud clusters, where m is the longitude direction length and n is the latitude direction length. We then search the current time cloud cluster in the space range of with the central point P(i, j) at t−1, where and . In the searching area at t−1, we save the cloud clusters whose BTmin increases beyond 8 K and the overlap ratio beyond 50%. Finally, we calculate the cross-correlation coefficient between the satisfying cloud clusters at t−1 and the current uncertain cloud cluster at t0. The cross-correlation coefficient r is defined as:
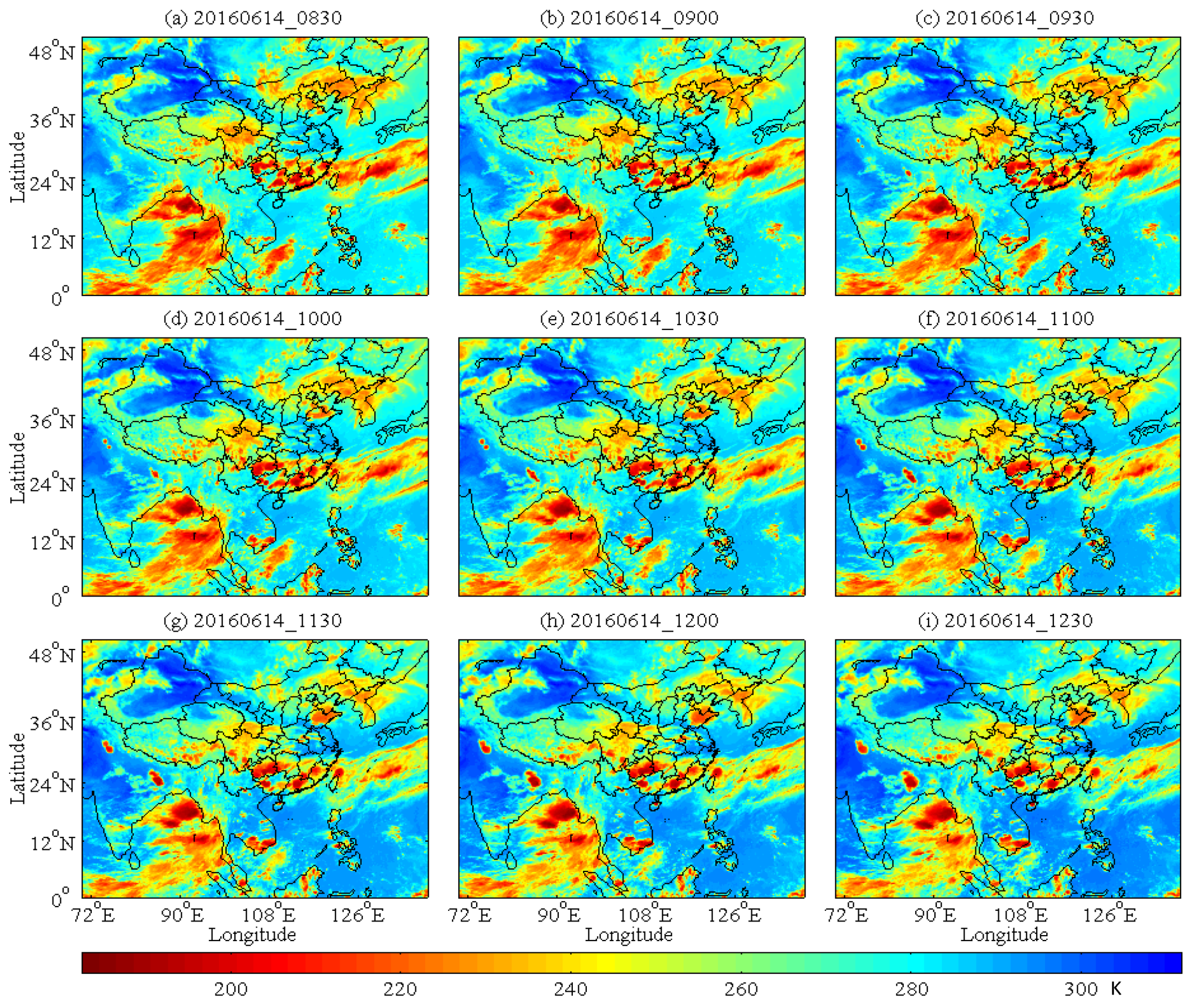
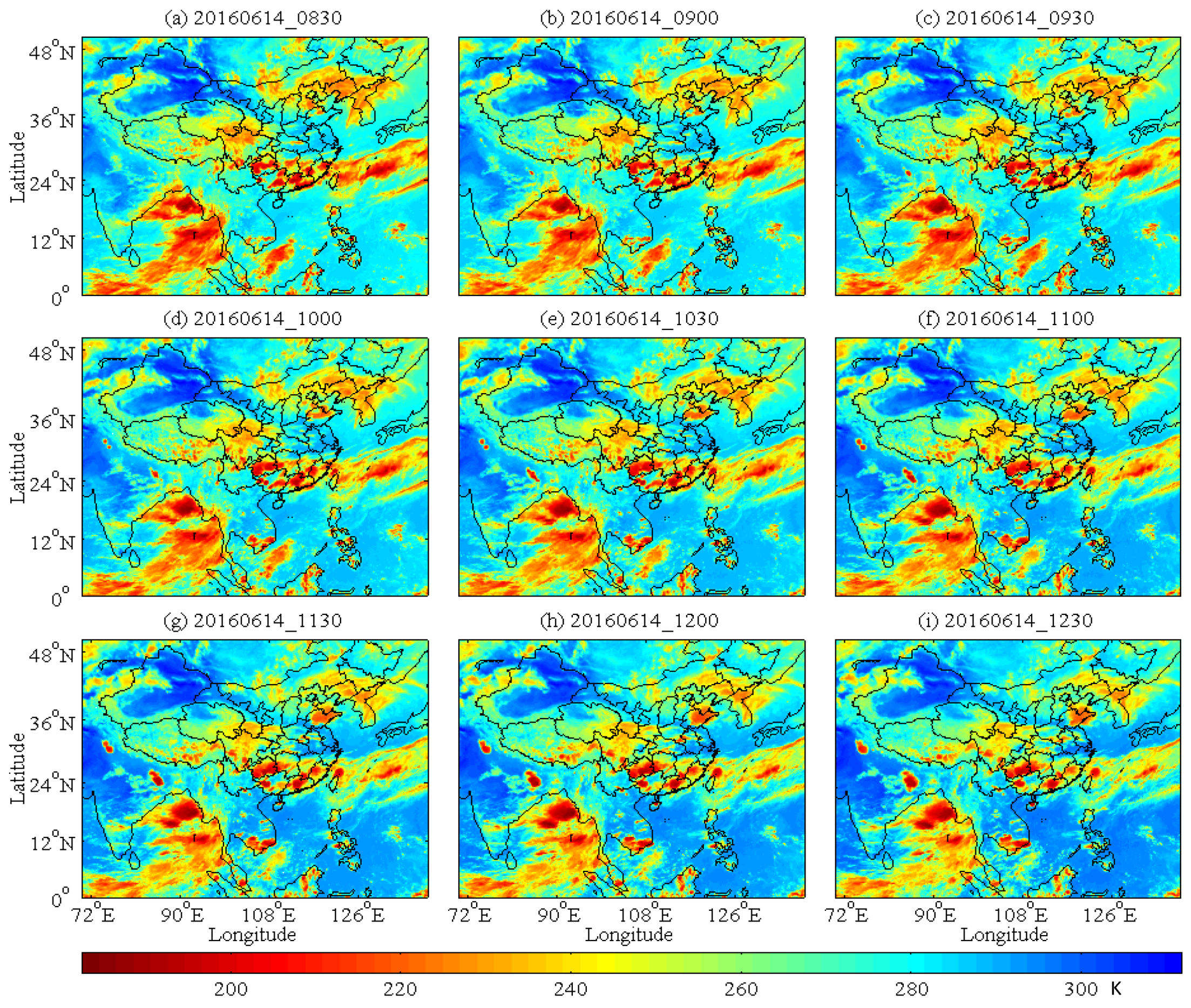
3. Application
4. Conclusions
- (1)
- The integrated method is effective for convection in different scales and life periods, especially the isolated convective cloud. However, in the large-scale cloud system, it is easy to misinterpret some cirrus clouds as convective cloud as well.
- (2)
- The BT threshold method was capable of detecting convective cloud with a low BTmin more efficiently, and the tracking methods are more capable of detecting convection which is growing. Also, the combined use of overlap ratio, minimum brightness temperature change and cross-correlation coefficient shows a remarkable effect on the elimination process for non-convection area.
- (3)
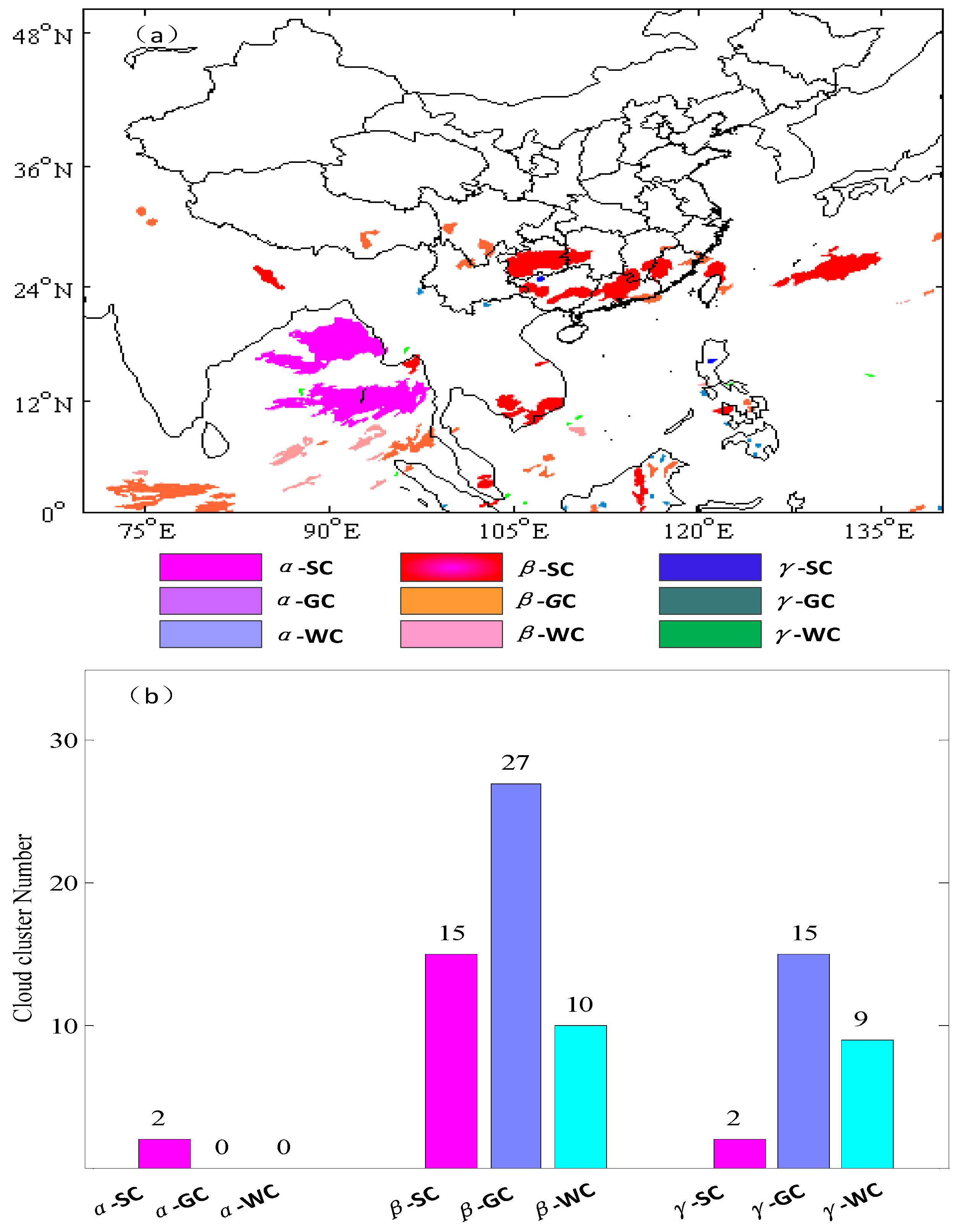
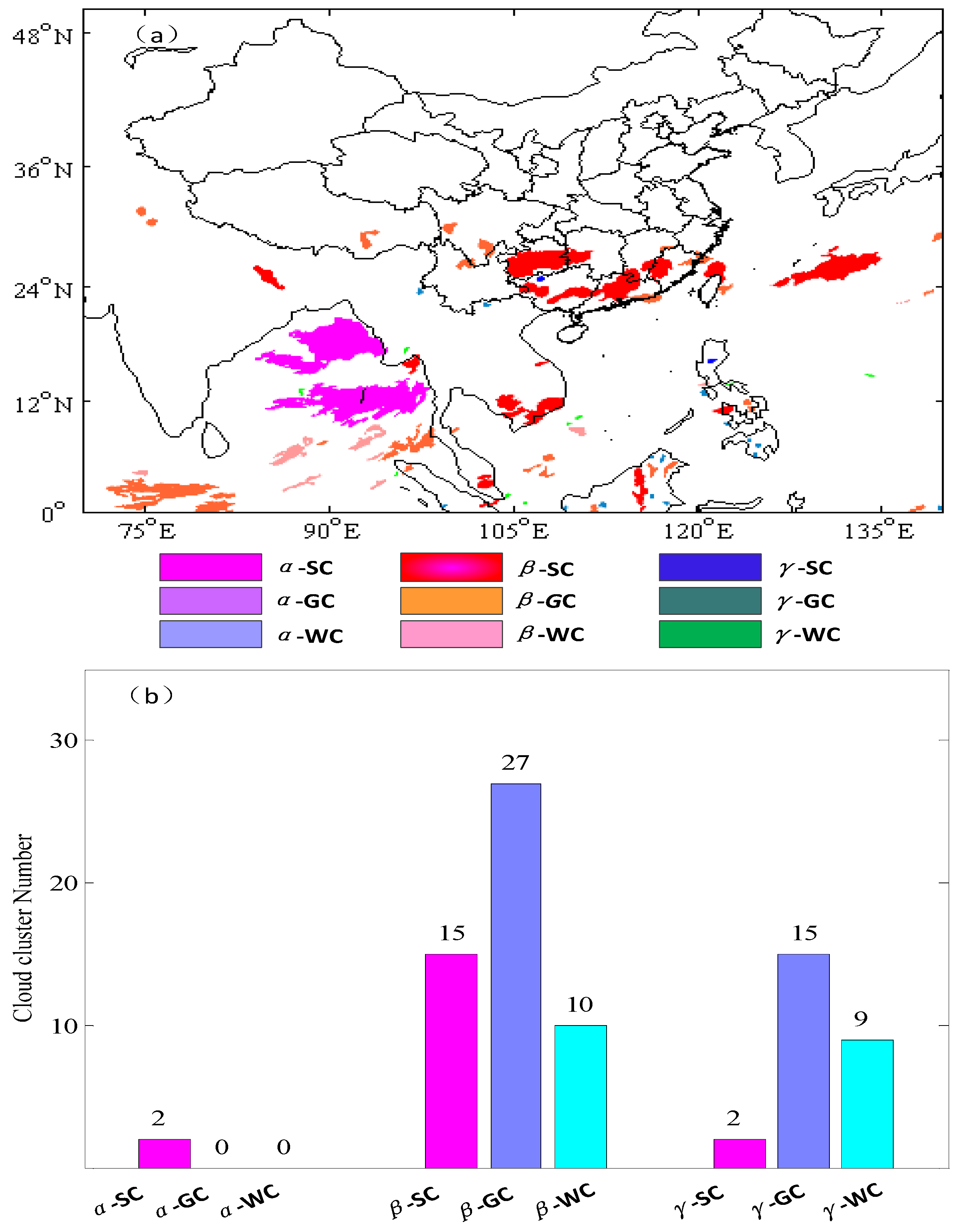
- The statistical result shows that the α-type cloud clusters detected by the integrated method are mostly large-scale cloud systems, and the β- and γ-type cloud clusters have the highest proportion of general convective cloud. However, the proportion of weak convection is higher than that of severe ones in γ-type cloud, but it is the opposite in β-type cloud.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fujita, T.; Bradbnry, D.L.; Murino, C. A Study of Mesoscale Cloud Motions Computed from ATS-1 and Terrestrial Photographs; R. Satellite Mesometeorological Research Project Research Paper No. 71; Department of Geophysical Sciences University of Chicago: Chicago, IL, USA, 1968. [Google Scholar]
- Baldauf, M.; Seifert, A.; Forstner, J.; Majewski, D.; Raschendorfer, M.; Reinhardt, T. Operational convective-scale numerical weather prediction with the cosmo model: description and sensitivities. Mon. Weather Rev. 2011, 139, 3887–3905. [Google Scholar] [CrossRef]
- Long, Q.; Chen, Q.; Gui, K.; Zhang, Y. A case study of a heavy rain over the southeastern Tibetan Plateau. Atmosphere 2016, 7, 118. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, X.; Tao, Z.Y. Geographic distribution and life cycle of mesoscale convection system in China and its vicinity. J. Prog. Nat. Sci. 1997, 7, 583–589. [Google Scholar]
- Tao, Z.Y.; Wang, H.Q.; Wang, X. A survey of meso-α-scale convection systems over China during 1995. Acta Meteorol. Sin. 1998, 56, 166–177. [Google Scholar]
- Zheng, Y.G.; Zhu, P.J.; Chen, M. General investigation and analysis of Meso-α-scale convection systems in the Yellow Sea and surrounding areas from 1993 to 1996. Acta Sci. Nat. Univ. Pekin. 2004, 40, 66–72. (In Chinese) [Google Scholar]
- Bai, J.; Wang, H.Q.; Tao, Z.Y. Recognition and tracing of severe convective cloud from IR images of GMS. J. Trop. Meteorol. 1997, 13, 158–167. [Google Scholar]
- Csekits, C.; Zwatz, V.M.; Jann, A. Automatic detection of convective cells-a nowcast module at the Austrian meteorological service. In Proceedings of the 2000 EUMETSAT Meteorological Satellite Data Users’ Conference, Bologna, Italy, 29 May–2 June 2000; pp. 715–721.
- Mueller, C.; Saxen, T.; Roberts, R.; Wilson, J.; Betancourt, T.; Dettling, S.; Oien, N.; Yee, J. NCAR auto-nowcast system. Weather Forecast. 2003, 18, 545–561. [Google Scholar] [CrossRef]
- Doelling, D.R.; Gambheer, A.V.; Stassi, J.C. Deep convective cloud calibration. In Proceedings of the 29th CERES Science Team Meeting, Hampton, VA, USA, 17–18 November 2003; Available online: https://ceres.larc.nasa.gov/documents/STM/2003-10/pdf/Doelling_DeepC.pdf (accessed on 11 July 2016).
- Liu, J. Improvement of dynamic threshold value extraction technic in FY-2 cloud detection. J. Infrared Millim. Waves 2010, 29, 288–292. (In Chinese) [Google Scholar]
- Li, H.J.; Kong, Y.S. To fetch convective cloud cell with continuous wavelet transaction method. J. PLA Univ. Sci. Technol. 2005, 6, 181–186. (In Chinese) [Google Scholar]
- Chen, G.Y.; Ding, X.X.; Zhao, L.Y. An automatical pattern recognition technique of cloud based on fuzzy neural network. Chin. J. Atmos. Sci. 2005, 29, 537–844. (In Chinese) [Google Scholar]
- Li, Z.J. Estimation of cloud motion using cross-correlation. Adv. Atmos. Sci. 1998, 15, 277–282. [Google Scholar]
- Liu, K.F.; Zhang, R.; Sun, Z.B. A cloud movement short-time forecast based on cross-correlation. J. Image Graph. 2006, 11, 586–591. (In Chinese) [Google Scholar]
- Liu, Y.A.; Wei, M. Application of FY-2C data in rainstorm nowcasting. In Proceedings of the First International Conference on Information Science and Engineering, Nanjing, China, 26–28 December 2009; pp. 4766–4769.
- Ohsawa, T.; Ueda, H.; Hayashi, T.; Watanabe, A.; Matsumoto, J. Diurnal variations of convective activity and rainfall in tropical Asia. J. Meteorol. Soc. Jpn. Ser. II 2001, 79, 333–352. [Google Scholar] [CrossRef]
- Vila, D.A.; Machado, L.A.T.; Laurent, H.; Velasco, I. Forecast and tracking the evolution of cloud clusters (For TraCC) using satellite infrared imagery: Methodology and validation. Weather Forecast. 2008, 23, 233–245. [Google Scholar] [CrossRef]
- Arnaud, Y.; Desbois, M.; Maizi, J. Automatic tracking and characterization of African convection systems on Meteosat pictures. J. Appl. Meteorol. 1992, 31, 443–453. [Google Scholar] [CrossRef]
- Carvalho, L.M.V.; Jones, C. A satellite method to identify structural properties of mesoscale convection systems based on maximum spatial correlation tracking technique (MASCOTTE). J. Appl. Meteorol. 2001, 40, 1683–1701. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, H.J.; Zhai, J.; Feng, Y. FY2E convective cloud detection method based on multi-thresholds. Remote Sens. Technol. Appl. 2014, 29, 915–922. (In Chinese) [Google Scholar]
- Shah, S.; Notarpietro, R.; Branca, M. Storm identification, tracking and forecasting using high-resolution images of short-range x-band radar. Atmosphere 2015, 6, 579–606. [Google Scholar] [CrossRef]
- Li, P.W.; Wong, W.K.; Chan, K.Y.; Lai, E.S. SWIRLS—An Evolving Nowcasting System; Technical Note, No. 100; Hong Kong Observatory: Hong Kong, China, 2000. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 200 < BTmin ≤ 2000 | 20 < BTmin ≤ 200 | 0 < BTmin ≤ 20 | |
|---|---|---|---|
| L > 240 | α-weak convection (α-SC) | β-weak convection (β-SC) | γ-weak convection (γ-SC) |
| 220 < L ≤ 240 | α-general convection (α-GC) | β-weak convection (β-GC) | γ-general convection (β-GC) |
| L ≤ 220 | α-severe convection (α-WC) | β-severe convection (β-WC) | γ-severe convection (γ-WC) |
| Number | Mean Scale (km) | Mean BTIR1 (K) | |
|---|---|---|---|
| Severe convection centers | 38 | 20.6 | 204.8 |
| Preliminary detection result | 173 | 23.9 | 225.2 |
| Severe convection | 19 | 69.7 | 223.5 |
| Uncertain cloud | 154 | 18.3 | 232.5 |
| Un-severe convection | 61 | 27.4 | 232.3 |
| Integrated detection result | 80 | 37.4 | 225.1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, K.; Shi, H.; Yang, P.; Zhao, X. An Integrated Convective Cloud Detection Method Using FY-2 VISSR Data. Atmosphere 2017, 8, 42. https://doi.org/10.3390/atmos8020042
Liang K, Shi H, Yang P, Zhao X. An Integrated Convective Cloud Detection Method Using FY-2 VISSR Data. Atmosphere. 2017; 8(2):42. https://doi.org/10.3390/atmos8020042
Chicago/Turabian StyleLiang, Kuai, Hanqing Shi, Pinglv Yang, and Xiaoran Zhao. 2017. "An Integrated Convective Cloud Detection Method Using FY-2 VISSR Data" Atmosphere 8, no. 2: 42. https://doi.org/10.3390/atmos8020042
APA StyleLiang, K., Shi, H., Yang, P., & Zhao, X. (2017). An Integrated Convective Cloud Detection Method Using FY-2 VISSR Data. Atmosphere, 8(2), 42. https://doi.org/10.3390/atmos8020042