
Evaluating the Effects of Raindrop Motion on the Accuracy of the Precipitation Inversion Algorithm by X-SAR


Abstract
1. Introduction
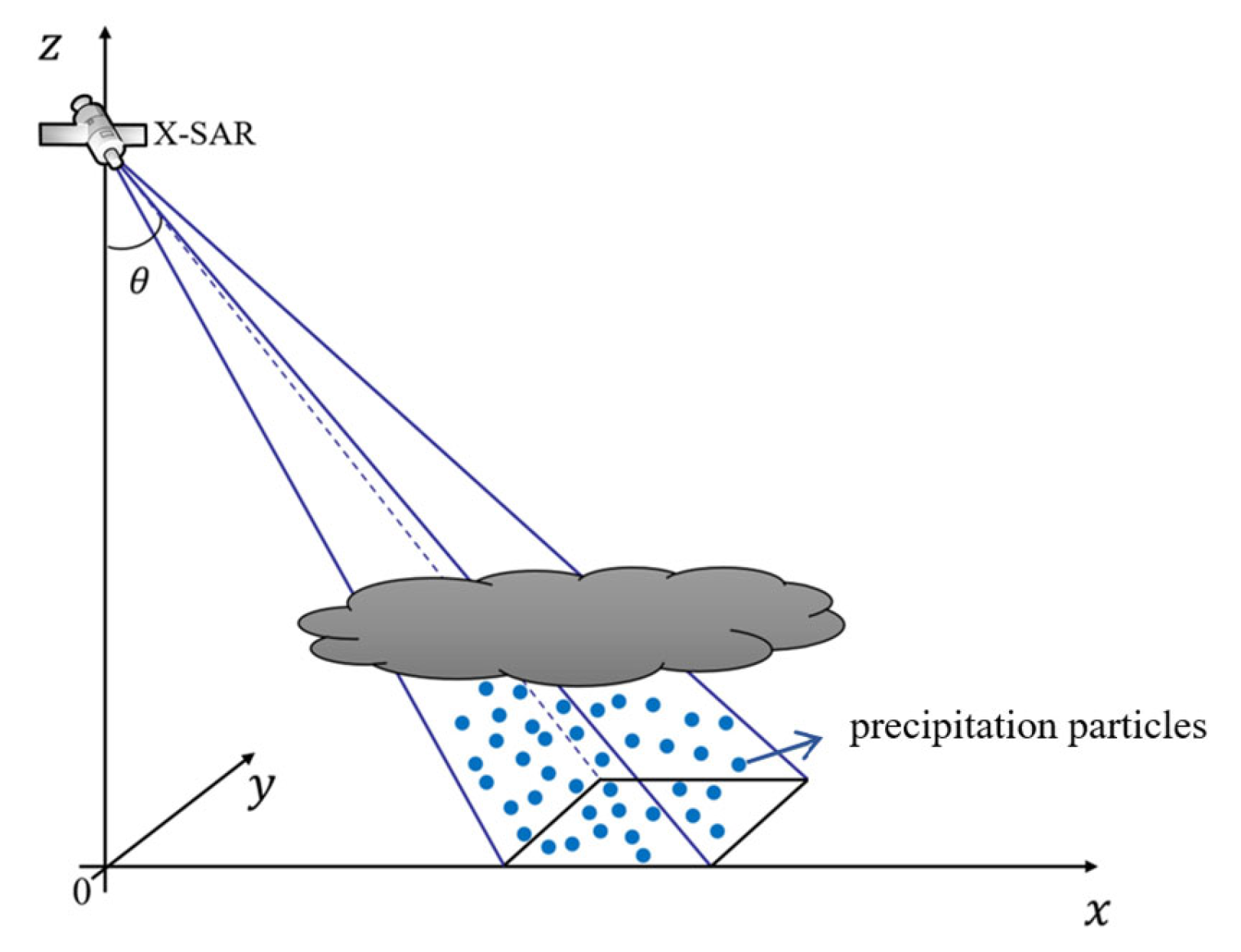
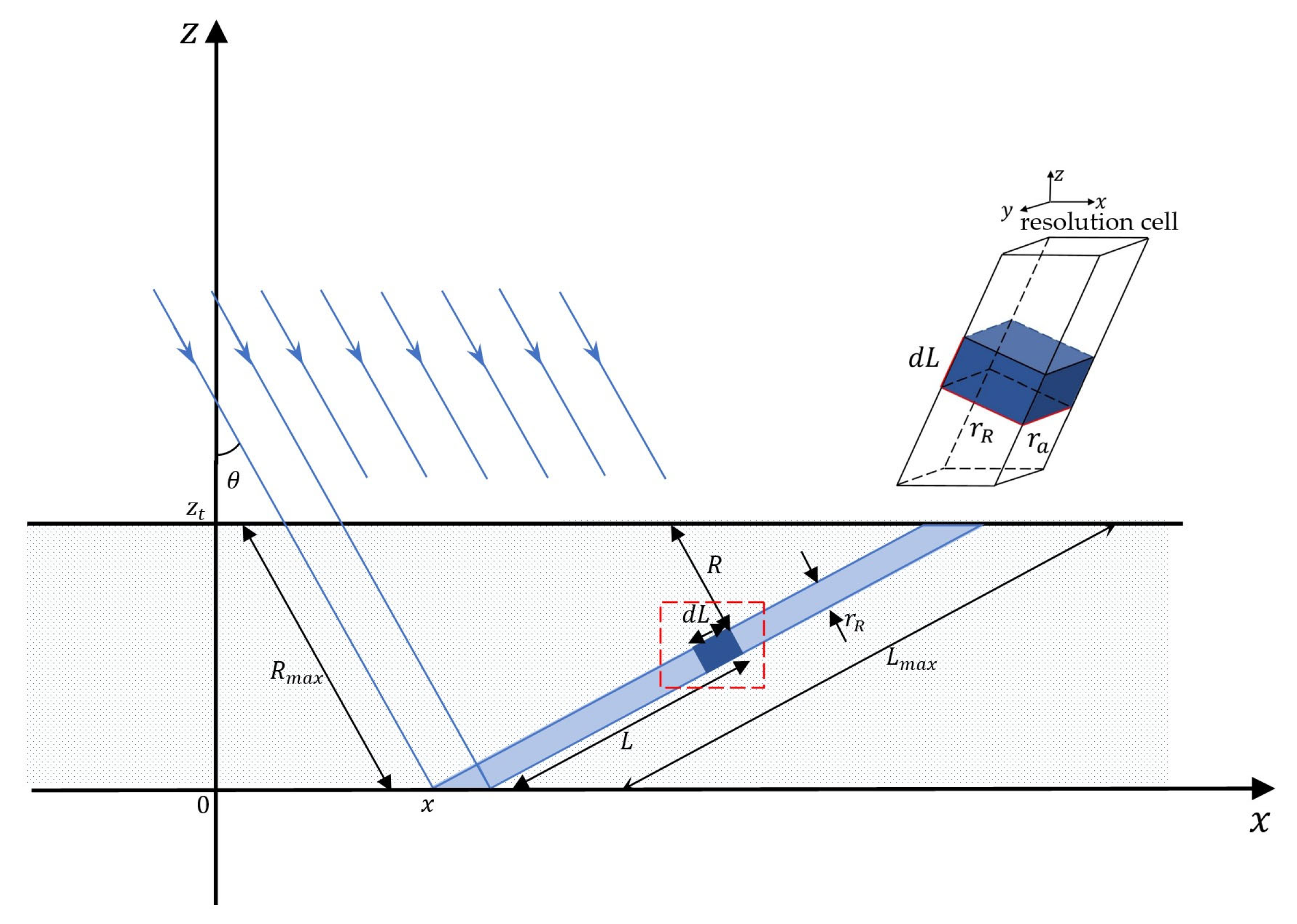
2. SAR Rain Measurement Principles
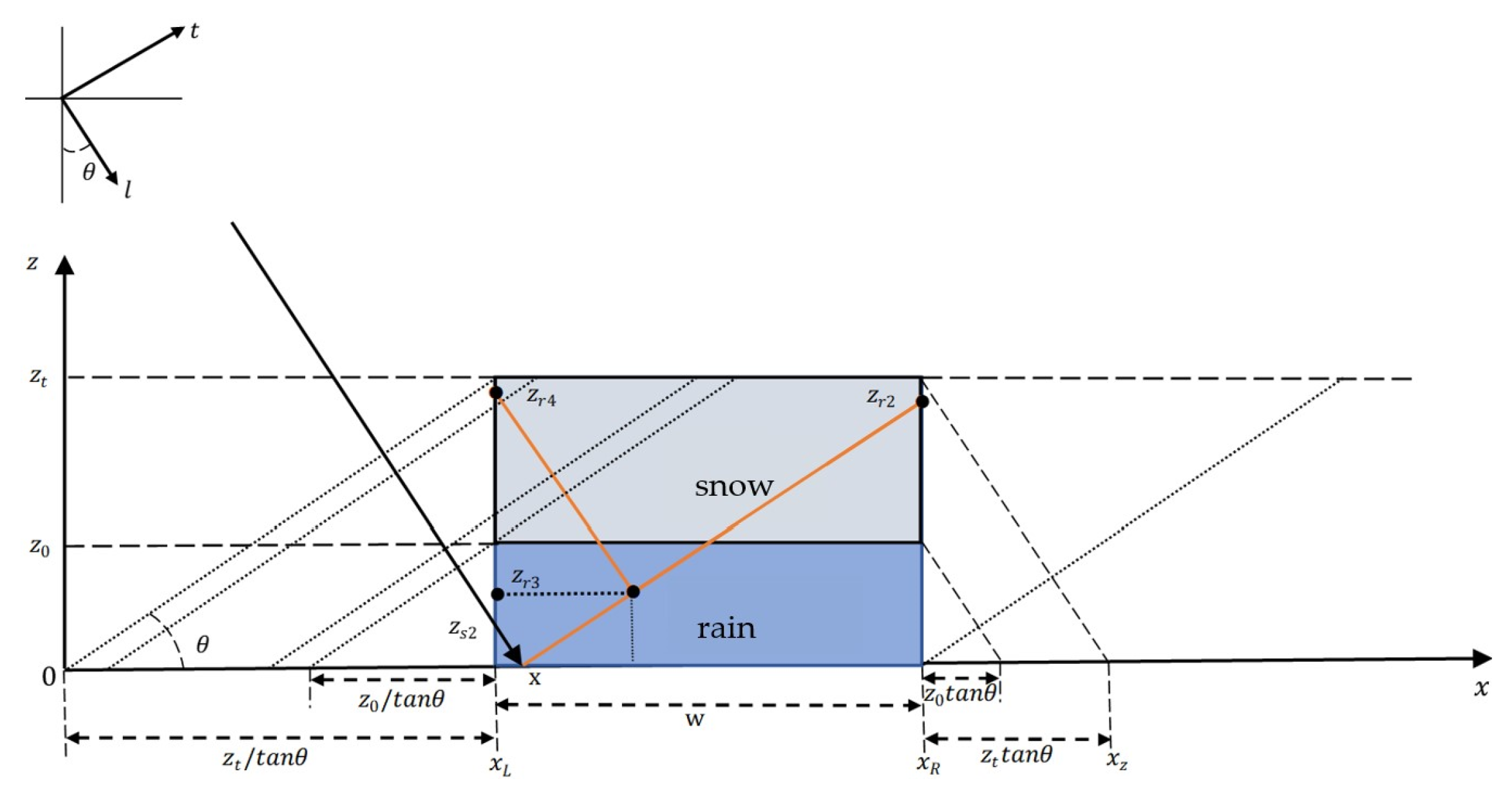
3. Raindrop Motion Error Model
4. RMM Algorithm
4.1. RCS and NRCS
4.2. Retrieval of Precipitation Distribution
5. Simulation and Discussion
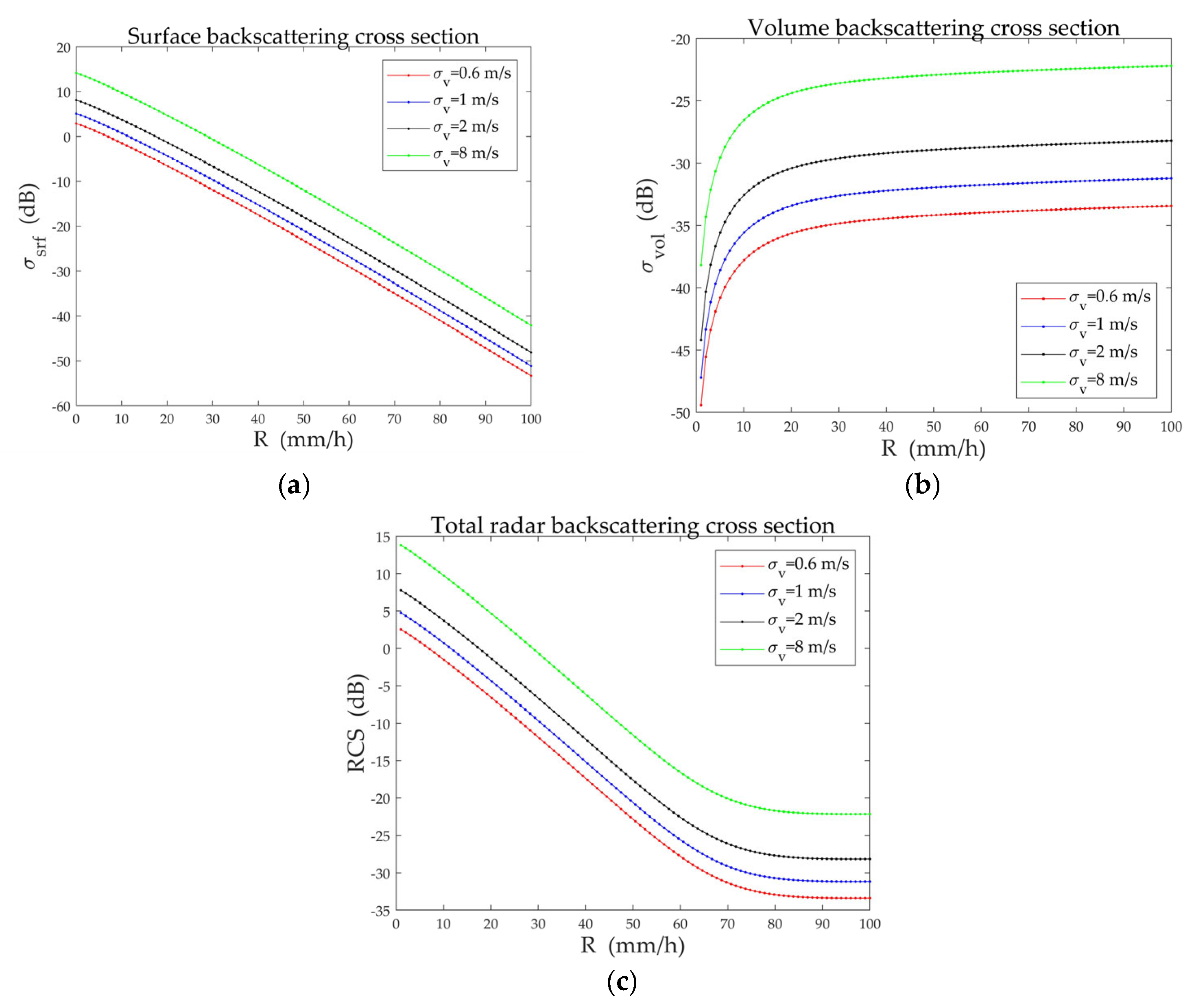
5.1. RCS under Raindrop Motion Error Model
5.2. Retrieval Results of Precipitation Distribution
5.2.1. Simulation without Raindrop Motion
5.2.2. Simulation with Raindrop Motion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Skofronick-Jackson, G.M.; Draper, D.W.; Newell, D.A. The Global Precipitation Measurement (GPM) Mission. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3589–3592. [Google Scholar]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-global, Multiyear, Combined-sensor Precipitation Estimates at Fine Scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Huffman, G.; Bolvin, D.; Braithwaite, D.; Hsu, K.; Joyce, R.; Kidd, C.; Nelkin, E.; Xie, P. NASA Global Precipitation Measurement Integrated Multi-Satellite Retrievals for GPM (IMERG). Algorithm Theoretical Basis Doc.; Version 4.5; National Aeronautics and Space Administration: Washington, DC, USA, 2015; 30p. [Google Scholar]
- Eineder, M.; Minet, C.; Steigenberger, P.; Cong, X.Y.; Fritz, T. Imaging Geodesy-toward Centimeter-level Ranging Accuracy with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 661–671. [Google Scholar] [CrossRef]
- Chen, J.; Jia, H.F.; Yang, J.; Chen, Y.R. Primary Exploration on Monitoring of River Pollution Based on Polarimetric Coherence Matrix. J. Remote Sens. 2011, 15, 1065–1078. [Google Scholar] [CrossRef]
- Wu, T.; Wang, C.; Zhang, H.; Zhang, Z.X. Space-borne SAR Image Simulation Based on Image Characteristics. J. Remote Sens. 2007, 11, 214–220. [Google Scholar] [CrossRef]
- Navarro, A.; García-Ortega, E.; Merino, A.; Sánchez, J.L.; Tapiador, F.J. Orographic Biases in IMERG Precipitation Estimates in the Ebro River Basin (Spain): The Effects of Rain Gauge Density and Altitude. Atmos. Res. 2020, 244, 10. [Google Scholar] [CrossRef]
- Leng, X.G.; Ji, K.F.; Kuang, G.Y. Ship Detection from Raw SAR Echo Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 11. [Google Scholar] [CrossRef]
- Duysak, H.; Yigit, E. Investigation of the Performance of Different Wavelet-based Fusions of SAR and Optical Images Using Sentinel-1 and Sentinel-2 Datasets. Int. J. Eng. Geosci. 2022, 7, 81–90. [Google Scholar] [CrossRef]
- Jackson, C. Synthetic Aperture Radar: Marine User’s Manual; United States Government Printing Office: Washington, DC, USA, 2004; pp. 1–25. [Google Scholar]
- Jameson, A.R.; Li, F.K.; Durden, S.L.; Haddad, Z.S.; Holt, B.M.; Fogarty, T.; Im, E.; Moore, R.K. SIR-C/X-SAR Observations of Rain Storms. Remote Sens. Environ. 1997, 59, 267–279. [Google Scholar] [CrossRef]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The Global Precipitation Measurement Mission. Bull. Amer. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Melsheimer, C.; Alpers, W.; Gade, M. Investigation of Multifrequency/Multipolarization Radar Signatures of Rain Cells over the Ocean Using SIR-C/X-SAR Data. J. Geophys. Res. Ocean. 1998, 103, 18867–18884. [Google Scholar] [CrossRef]
- Moore, R.K.; Mogili, A.; Fang, Y.; Beh, B.; Ahamad, A. Rain Measurement with SIR-C/X-SAR. Remote Sens. Environ. 1997, 59, 280–293. [Google Scholar] [CrossRef]
- Pichugin, A.P.; Spiridonov, Y.G. Spatial-distribution of Rainfall Intensity Recovery from Space Radar Images. Sov. J. Remote Sens. 1991, 8, 917–932. [Google Scholar]
- Weinman, J.A.; Marzano, F.S. An Exploratory Study to Derive Precipitation over Land from X-band Synthetic Aperture Radar Measurements. J. Appl. Meteorol. Climatol. 2008, 47, 562–575. [Google Scholar] [CrossRef]
- Weinman, J.A.; Marzano, F.S.; Plant, W.J.; Mugnai, A.; Pierdicca, N. Rainfall Observation from X-band Spaceborne Synthetic Aperture Radar. Nat. Hazards Earth Syst. Sci. 2009, 9, 77–84. [Google Scholar] [CrossRef]
- Zheng, Y.; Shi, Z.; Lu, Z.Z.; Ma, W.F. A Method for Detecting Rainfall From X-Band Marine Radar Images. IEEE Access 2020, 8, 19046–19057. [Google Scholar] [CrossRef]
- Zhao, Y.; Longépé, N.; Mouche, A.; Husson, R. Automated Rain Detection by Dual-Polarization Sentinel-1 Data. Remote Sens. 2021, 13, 3155. [Google Scholar] [CrossRef]
- Draper, D.W.; Long, D.G. Evaluating the Effect of Rain on SeaWinds Scatterometer Measurements. J. Geophys. Res. Ocean. 2004, 109, 12. [Google Scholar] [CrossRef]
- Satake, M.; Matsuoka, T.; Kobayashi, T.; Kojima, S.; Uemoto, J.; Umehara, T.; Uratsuka, S.; Yamaguchi, Y. Polarimetric Data Analysis of a Rainfall Event Observed by X-band Airborne SAR. In Proceedings of the IGARSS 2014—2014 IEEE International Geoscience and Remote Sensing Symposium, Quebec, QC, Canada, 13–18 July 2014; pp. 4105–4106. [Google Scholar]
- YU, S.; Yang, J.S.; He, S.Y.; He, Z.G.; Zheng, G. The Correction of Rain Effect on SAR Wind Field Retrieval. Haiyang Xuebao 2017, 39, 11. [Google Scholar] [CrossRef]
- Shen, H.; Seitz, C.; Perrie, W.; He, Y.J.; Powell, M. Developing a Quality Index Associated with Rain for Hurricane Winds from SAR. Remote Sens. 2018, 10, 1783. [Google Scholar] [CrossRef]
- Shao, W.Z.; Lai, Z.Z.; Nunziata, F.; Buono, A.; Jiang, X.W.; Zuo, J.C. Wind Field Retrieval with Rain Correction from Dual-Polarized Sentinel-1 SAR Imagery Collected during Tropical Cyclones. Remote Sens. 2022, 14, 5006. [Google Scholar] [CrossRef]
- Xu, F.; Li, X.F.; Jin, Y.Q. Physics-based Scattering Model of Rainfall over Sea Surface. In Proceedings of the 29th URSI General Assembly and Scientific Symposium (URSI GASS), Beijing, China, 16–23 August 2014; pp. 1–4. [Google Scholar]
- Zhang, P.C.; Du, B.Y.; Dai, T.P. Radar Meteorology, 2nd ed.; China Meteorological Press: Beijing, China, 2001; pp. 1–50. [Google Scholar]
- Probert-Jones, J.R. The Radar Equation in Meteorology. Q. J. Roy. Meteor. Soc. 1962, 88, 485–495. [Google Scholar] [CrossRef]
- Ahamad, A. Limitation on the Use of a Spaceborne SAR for Rain Measurements. NASA STI Recon Tech. Rep. N 1994, 95, 11228. [Google Scholar]
- Olsen, R.L.; Rogers, D.V.; Hodge, D.B. The aRb Relation in the Calculation of Rain Attenuation. IEEE Trans. Antennas Propag. 1978, 26, 318–329. [Google Scholar] [CrossRef]
- Sekhon, R.S.; Srivastava, R.C. Doppler Radar Observations of Drop-size Distributions in a Thunderstorm. J. Atmos. Sci. 1971, 28, 983–994. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive, 3rd ed.; Addison-Wesley Pub. Co.: London, UK, 1981; pp. 318–328. [Google Scholar]
- Long, T.; Ding, Z.G.; Xiao, F.; Wang, Y.; Li, Z. Spaceborne High-resolution Stepped-frequency SAR Imaging Technology. J. Radars 2019, 8, 782–792. [Google Scholar] [CrossRef]
- Atlas, D.; Moore, R.K. The Measurement of Precipitation with Synthetic Aperture Radar. J. Atmos. Ocean. Technol. 1987, 4, 368–376. [Google Scholar] [CrossRef]
- Li, N.N.; Zhou, M.L.; Xie, Y.N. An Effective Echo Method for Precipitation Measurement by SAR at Different Doppler Velocities. Ind. Control Comput. 2018, 31, 3. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. An Empirical Model and an Inversion Technique for Radar Scattering from Bare Soil Surfaces. IEEE Trans. Geosci. Remote Sens. 1992, 30, 370–381. [Google Scholar] [CrossRef]
- Tang, J.; Chen, S.; Li, Z.; Gao, L. Mapping the Distribution of Summer Precipitation Types over China Based on Radar Observations. Remote Sens. 2022, 14, 3437. [Google Scholar] [CrossRef]
- Xie, Y.N.; Huan, J.P. Feasibility Analysis of Spaceborne SAR Measuring Precipitation. In Proceedings of the Chinese Meteorological Society Meeting in 2008 of the Satellite Remote Sensing Technology and Treatment Methods Session, Beijing, China, 19–22 November 2008; pp. 265–269. [Google Scholar]
- Marzano, F.S.; Weinman, J.A. Inversion of Spaceborne X-band Synthetic Aperture Radar Measurements for Precipitation Remote Sensing Over Land. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3472–3487. [Google Scholar] [CrossRef]
- Luo, T.; Xie, Y.N.; Wang, R.; Yu, X.Y. An Analytic Solution to Precipitation Attenuation Expression with Spaceborne Synthetic Aperture Radar Based on Volterra Integral Equation. Remote Sens. 2022, 14, 357. [Google Scholar] [CrossRef]
- Xie, Y.N.; Liu, Z.K.; An, D.W. An Algorithm to Retrieve Precipitation with Synthetic Aperture Radar. J. Meteorol. 2016, 30, 401–411. [Google Scholar] [CrossRef]
- Wu, Y.Y.; Li, Q.L.; Li, G.X.; He, B.; Dong, L.; Lang, H.N.; Zhang, L.J.; Chen, S.P.; Tang, X.X. Vertical Wind Speed Variation in a Metropolitan City in South China. Earth Space Sci. 2022, 9, 20. [Google Scholar] [CrossRef]
- Testik, F.Y.; Boleka, A. Wind and Turbulence Effects on Raindrop Fall Speed. J. Atmos. Sci. 2023, 80, 1065–1086. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shape of Rain Cloud(s) | ||||
|---|---|---|---|---|
| Case 2 | 30 | 1.0 | 6 | Rectangular |
| Case 3 | 30 | 1.0 | 6 | Trapezoidal |
| Case 4 | 30 | 1.0 | 6 | Triangular |
| Case 7 | 30 | 1.1 | 6 | Rectangular |
| Case 8 | 30 | 1.1 | 6 | Trapezoidal |
| Case 9 | 30 | 1.1 | 6 | Triangular |
| (%) | Shape of Rain Cloud(s) | |||
|---|---|---|---|---|
| Case 2 | 29.36 | 2.13 | 5.62 | Rectangular |
| Case 3 | 30.94 | 3.13 | 7.06 | Trapezoidal |
| Case 4 | 30.82 | 2.73 | 6.07 | Triangular |
| Case 7 | 19.26 | 35.80 | 5.62 | Rectangular |
| Case 8 | 20.79 | 30.70 | 7.06 | Trapezoidal |
| Case 9 | 20.80 | 30.67 | 6.07 | Triangular |
| Shape of Rain Cloud(s) | |||
|---|---|---|---|
| Case 10 | 0.052 | 0.361 | Rectangular |
| Case 11 | 0.047 | 0.318 | Trapezoidal |
| Case 12 | 0.060 | 0.312 | Triangular |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, X.; Xie, Y.; Wang, R. Evaluating the Effects of Raindrop Motion on the Accuracy of the Precipitation Inversion Algorithm by X-SAR. Atmosphere 2024, 15, 265. https://doi.org/10.3390/atmos15030265
Yu X, Xie Y, Wang R. Evaluating the Effects of Raindrop Motion on the Accuracy of the Precipitation Inversion Algorithm by X-SAR. Atmosphere. 2024; 15(3):265. https://doi.org/10.3390/atmos15030265
Chicago/Turabian StyleYu, Xueying, Yanan Xie, and Rui Wang. 2024. "Evaluating the Effects of Raindrop Motion on the Accuracy of the Precipitation Inversion Algorithm by X-SAR" Atmosphere 15, no. 3: 265. https://doi.org/10.3390/atmos15030265
APA StyleYu, X., Xie, Y., & Wang, R. (2024). Evaluating the Effects of Raindrop Motion on the Accuracy of the Precipitation Inversion Algorithm by X-SAR. Atmosphere, 15(3), 265. https://doi.org/10.3390/atmos15030265