
A Drone Routing Problem for Ship Emission Detection Considering Simultaneous Movements



Abstract
1. Introduction
1.1. Background
1.2. Problem
1.3. Solutions
1.4. Organization
2. Related Studies
2.1. Air Pollutants Emitted from Ships
2.2. Drone Applications in Ship Emissions Detection
2.3. Incremental Contributions
3. Systematic Schemes for Detecting Ship Emissions by Drones
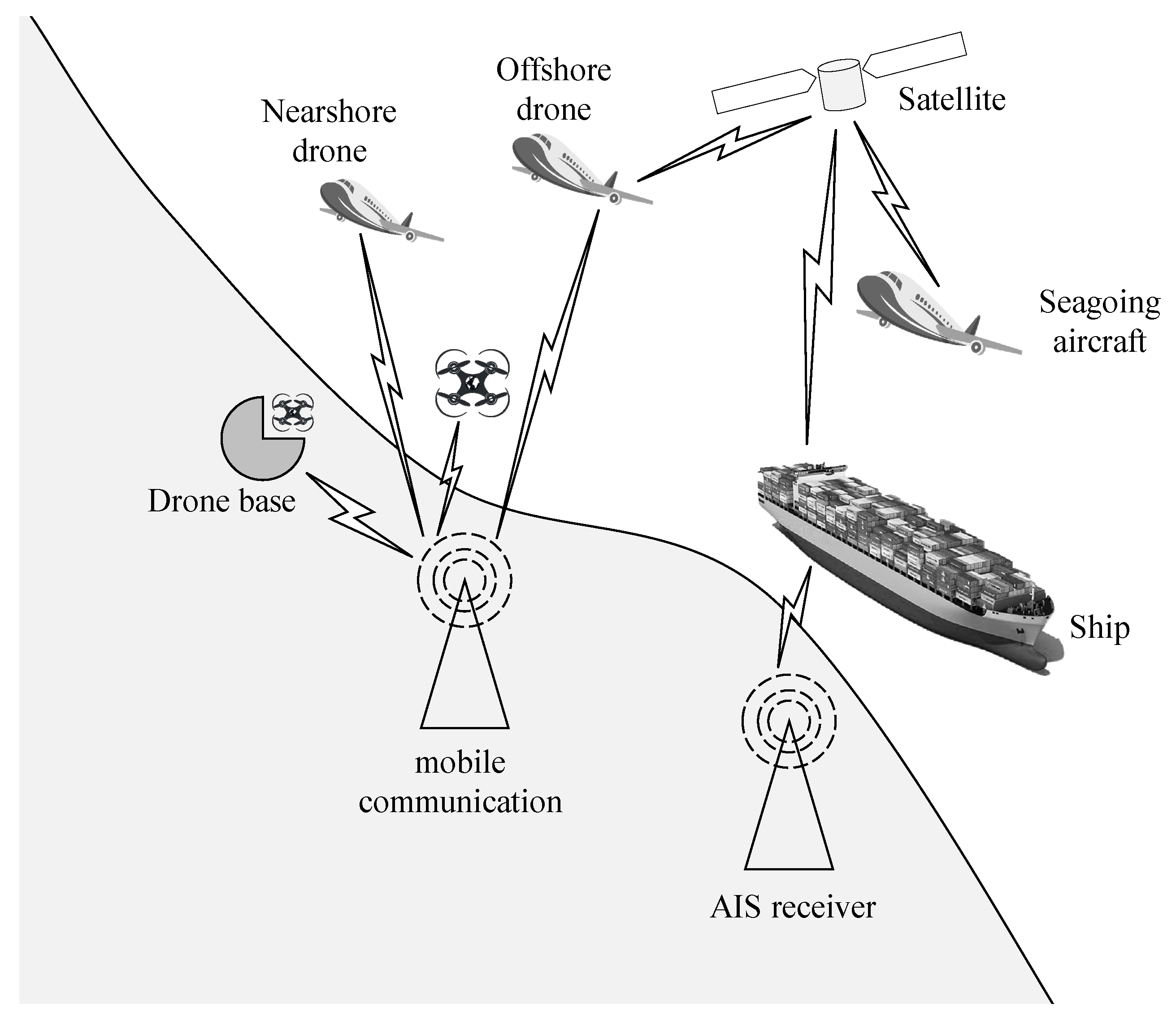
3.1. The Cyber-Physical System
3.2. The Functionality Components
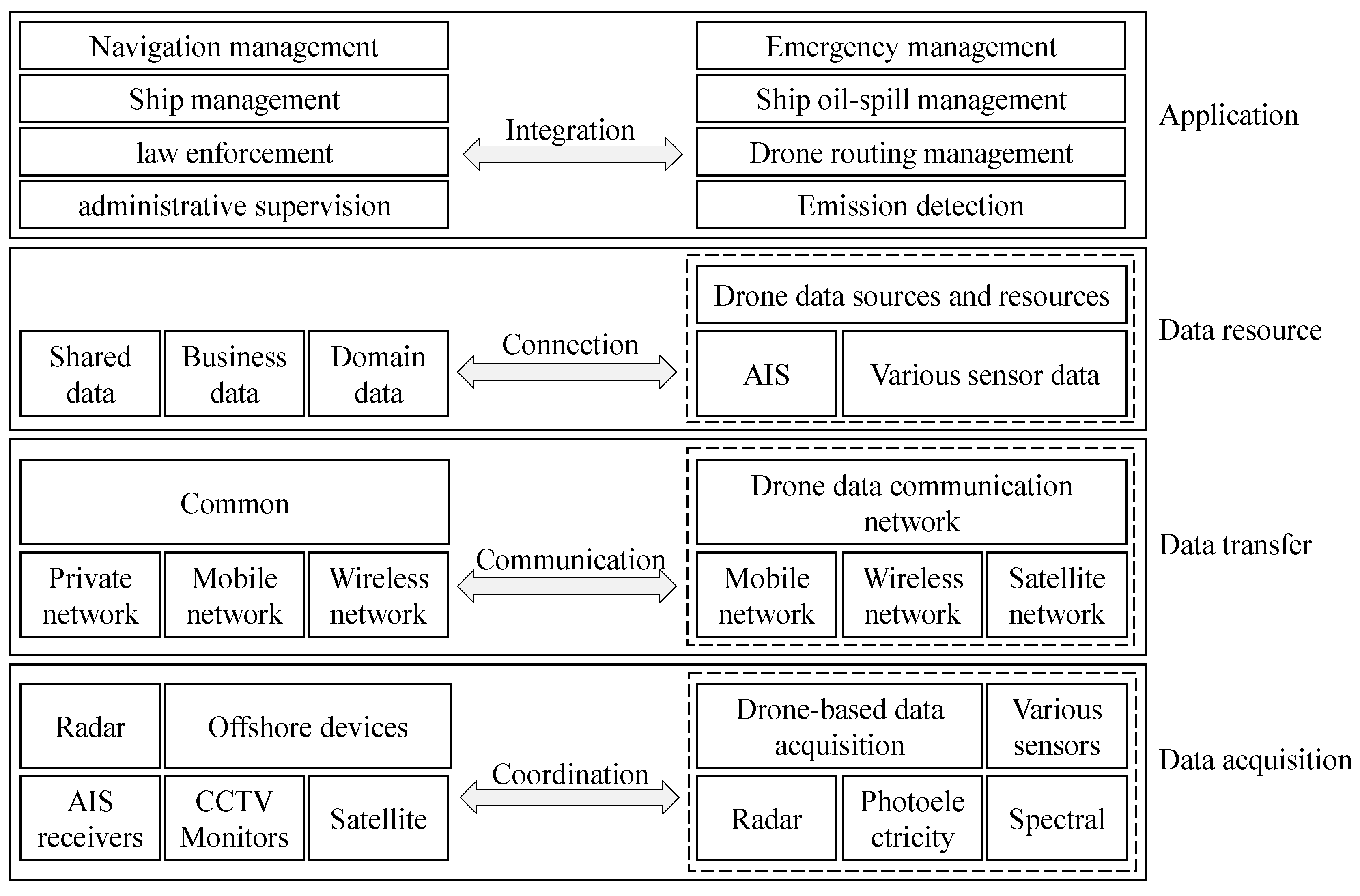
3.2.1. The System Framework
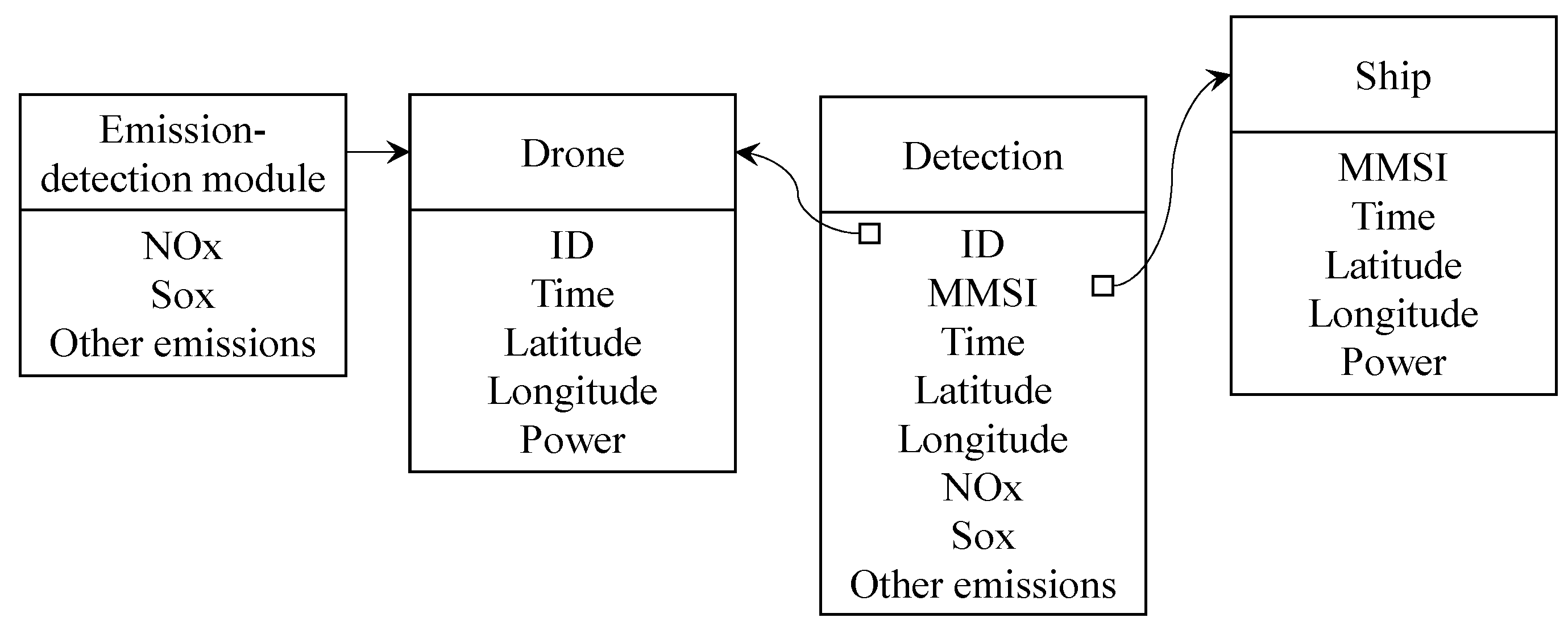
3.2.2. The Primary Data Model
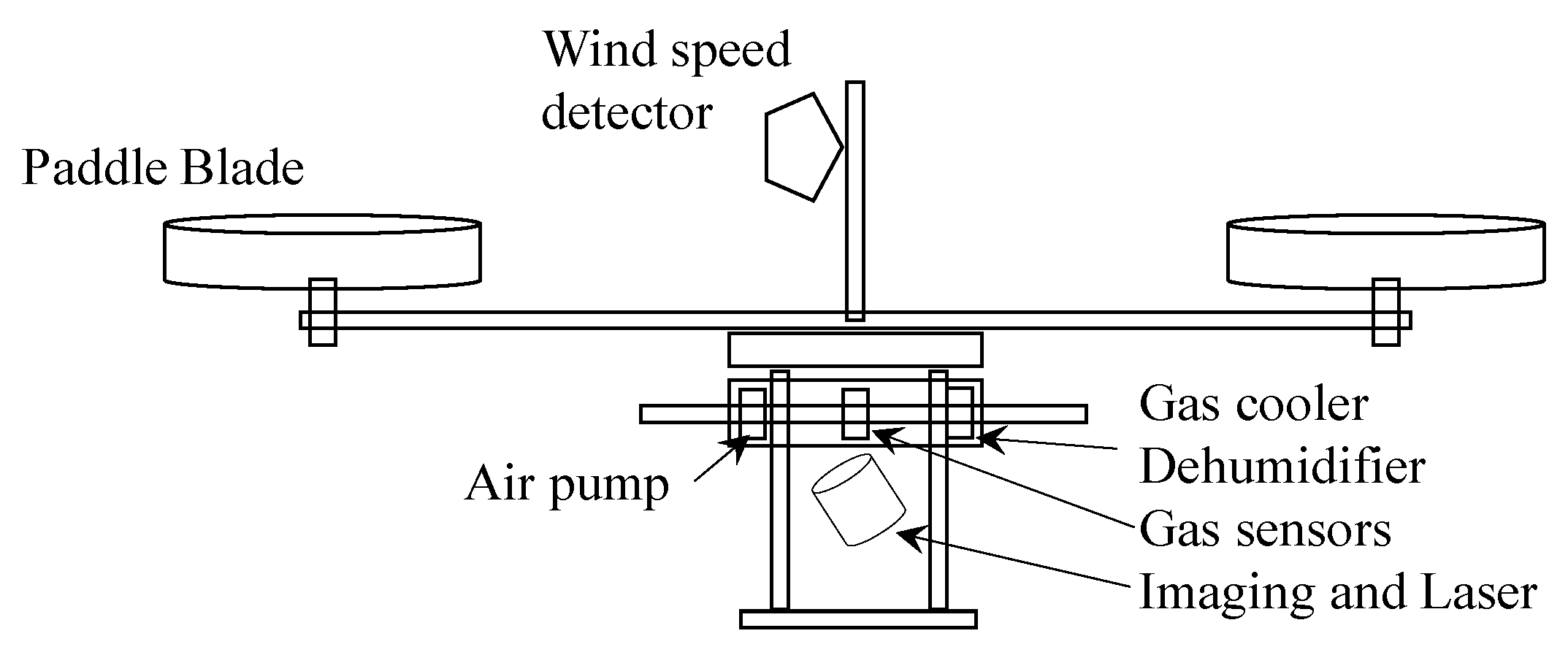
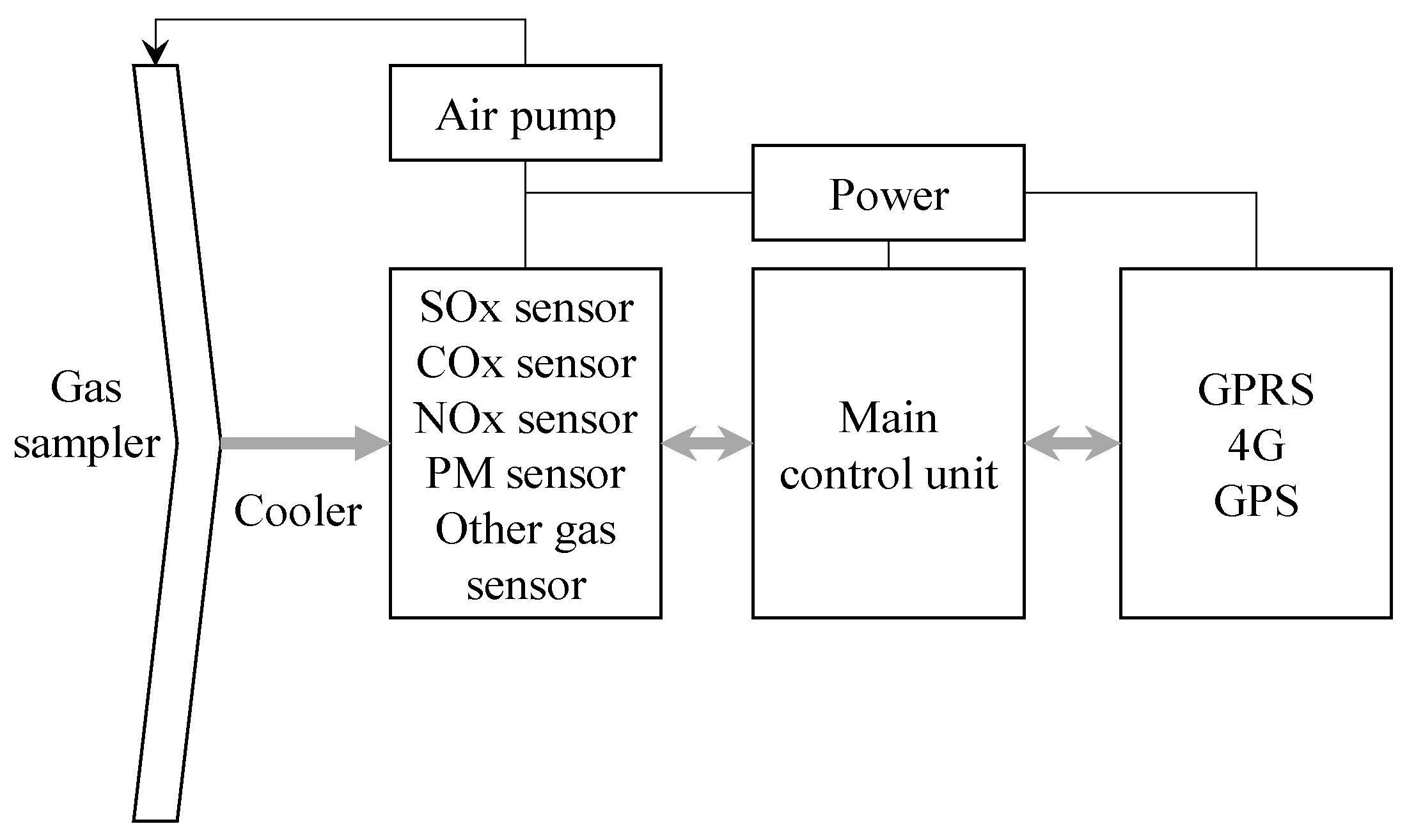
3.3. The Drone Modules
3.4. Emission Estimation
4. The Drone Routing Problem
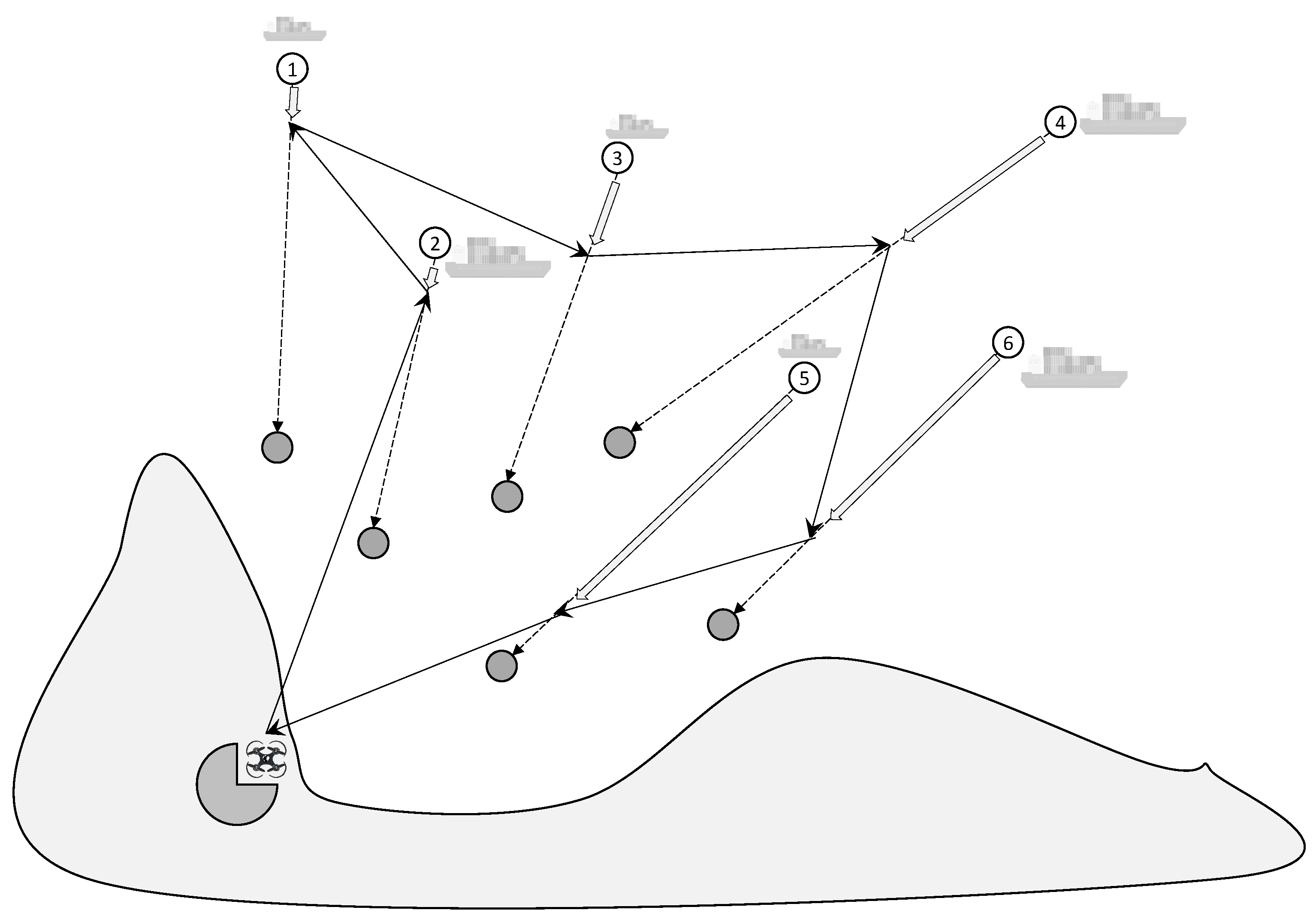
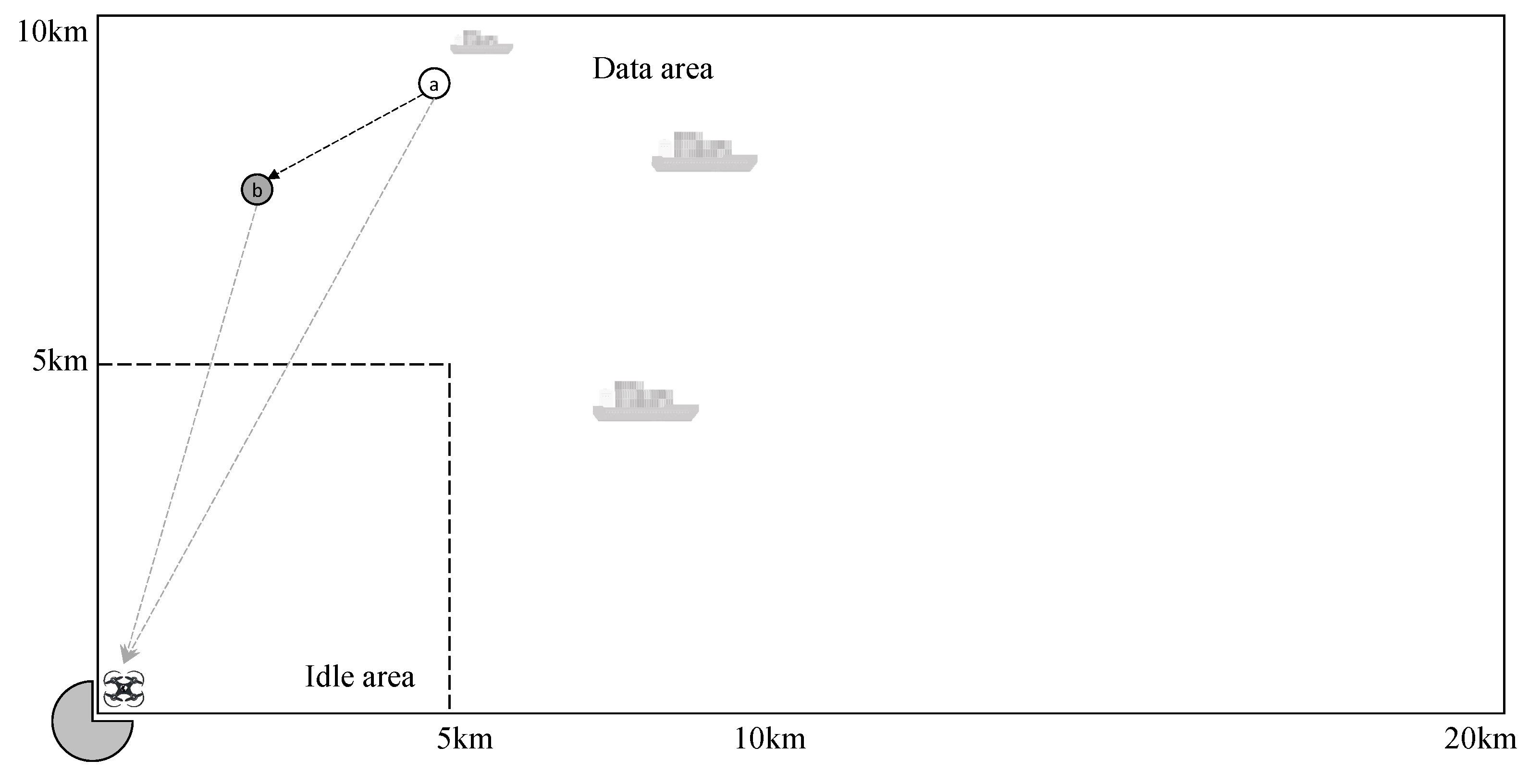
4.1. Problem Statement
4.2. Formulation
5. Solution Methods
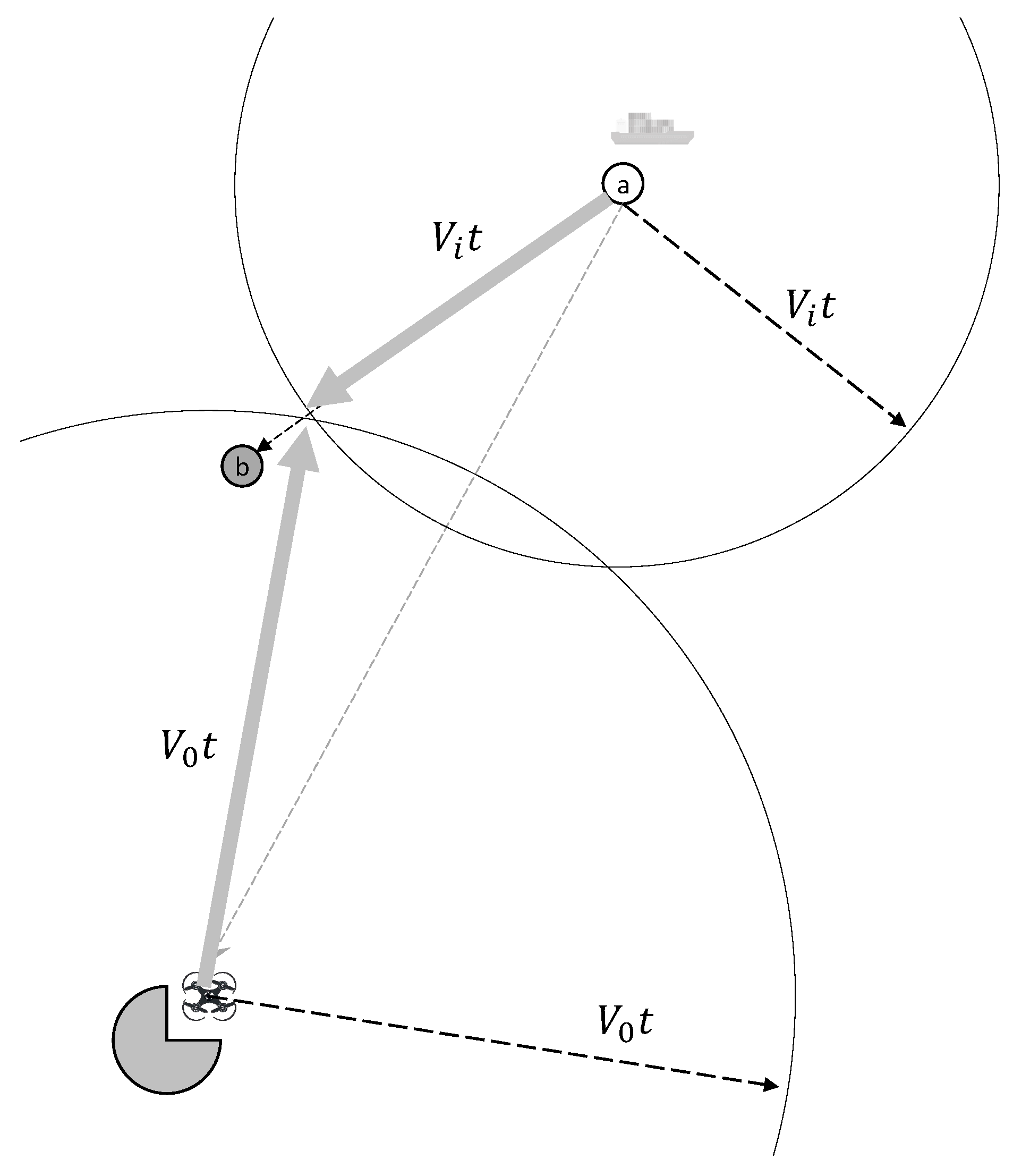
5.1. Sequence-Based Construction Algorithm
| Algorithm 1 Dichotomy algorithm (DA). | |
| Input | the ship #i’s position; |
| the ship #i’s target position; the drone base position; : the ship #i’s speed; : The speed of the drone. | |
| Output | : the position and time. |
| Variable | : the lower and upper bounds of the intersection position of the drone and ship; |
| : the time when the ship travels to the intersection point; : tolerance. | |
| Steps | |
| Step 1 | . |
| ; ; . | |
| Step 2 | Compute |
| . | |
| Step 3 | : |
| Step 3.1 | : |
| Step 3.2 | Else: |
| End if | |
| Step 3.3 | . |
| . | |
| Step 3.4 | Update |
| . | |
| Step 4 | |
| Algorithm 2 Sequence-based construction algorithm (SCA). | |
| Input | : A sequence of ships visited by the drone. |
| Output | : Flying segments of the drone; |
| : Flying time. | |
| Variable | : the position and time. |
| Steps | |
| Step 1 | |
| Step 2 | to |
| Step 3 | For in : |
| to | |
| Step 4 | to |
| Step 5 | Update . |
| Step 6 | |
5.2. A Genetic Algorithm (GA)
| Algorithm 3 The genetic algorithm. | |
| Input | ). |
| Output | Best solution |
| Steps | |
| Step 1 | . |
| Step 2 | Crossover and mutation. Crossover is responsible for exchanging genetic features between selected parents. Position-based crossover [49]. |
| Step 3 | . Then, f is returned by the algorithm for the task sequence and entitled as a raw fitness score through the fitness scaling method, which is converted to fitness values in a range that is suitable for the selection function. Here, the rand-based fitness scaling method is used. An individual’s rank is its position in the sorted scores: the rank of the best individual is one, the next best one is two, and so on. The rank scaling function assigns scaled values so that: The scaled value of an individual with rank n is proportional to ; The sum of the scaled values over the entire population equals the number of parents needed to create the next generation. The rank-based fitness scaling uses the order of the raw scores other than the spread of them. |
| Step 4 | by using a binary tournament selection method [50] and go to Step 2. |
| Step 5 | Termination. The algorithm stops if which is an arbitrary generation number, the algorithm terminates. |
6. Numerical Experiments
6.1. Parameter Estimation
6.2. Dataset Generation
6.3. Experimental Results
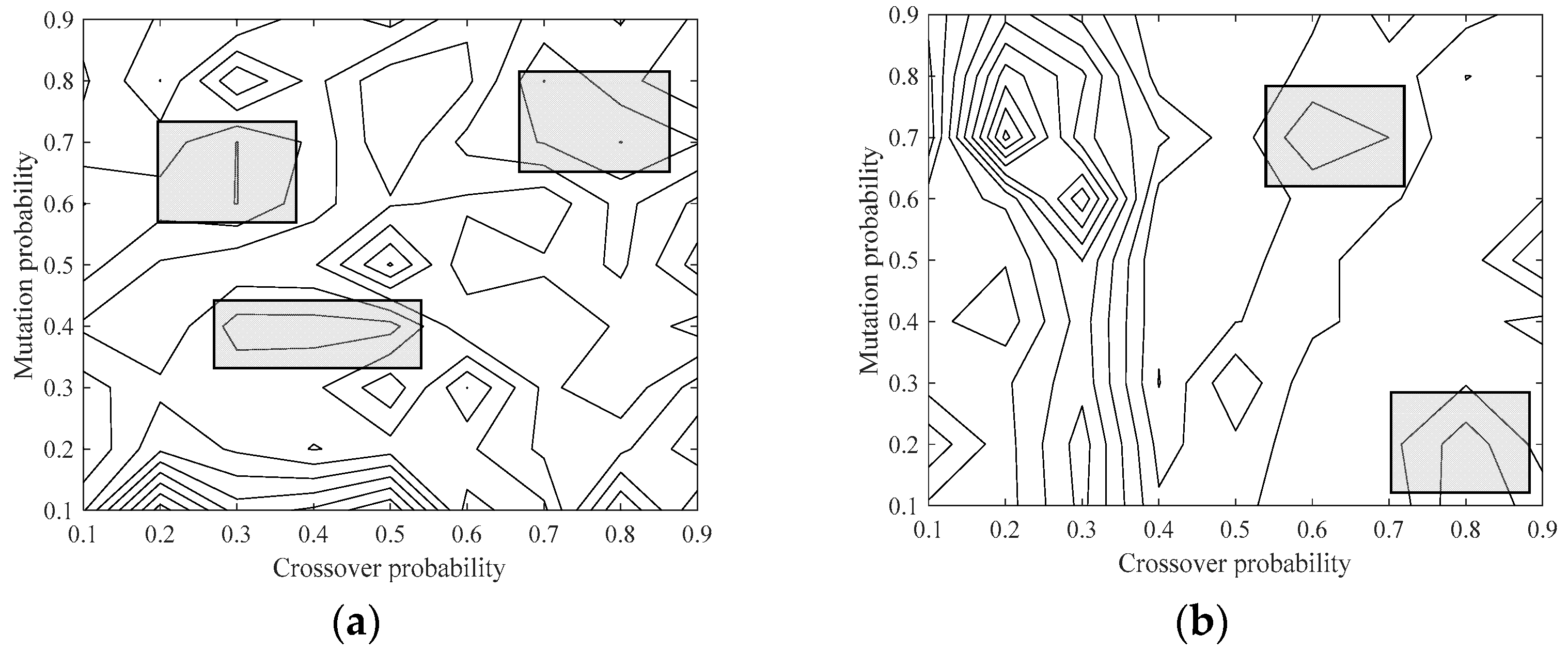
6.3.1. Algorithmic Parameter Tuning
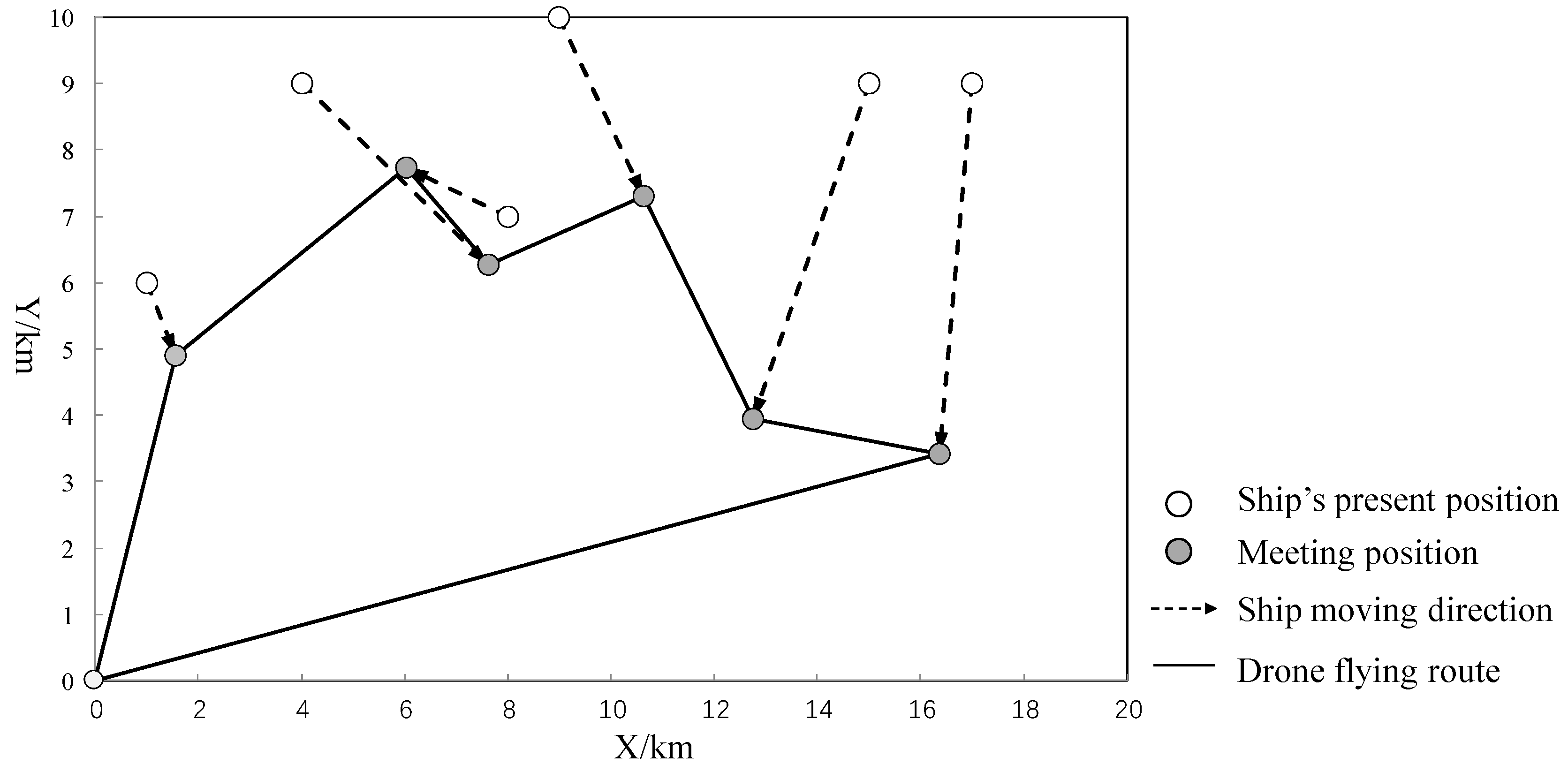
6.3.2. A Demonstration Using the GA
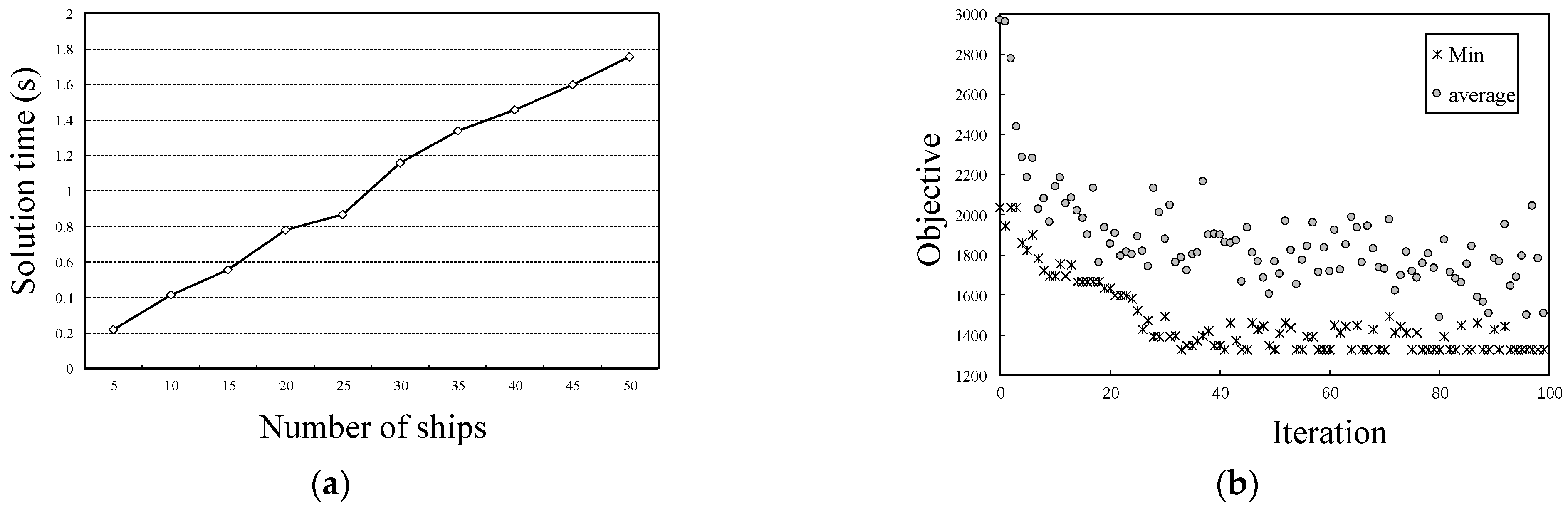
6.3.3. Algorithmic Performance
6.3.4. Parameter Sensitivity Analysis
6.4. Discussions and Managerial Implications
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chuah, L.F.; Bokhari, A.; Asif, S.; Klemeš, J.J.; Dailin, D.J.; Enshasy, H.E.; Halim, A.; Yusof, M. A review of performance and emission characteristic of engine diesel fuelled by biodiesel. Chem. Eng. Trans. 2022, 94, 1099–1104. [Google Scholar]
- Munir, M.; Saeed, M.; Ahmad, M.; Waseem, A.; Alsaady, M.; Asif, S.; Ahmed, A.; Khan, M.S.; Bokhari, A.; Mubashir, M.; et al. Cleaner production of biodiesel from novel non-edible seed oil (Carthamus lanatus L.) via highly reactive and recyclable green nano CoWO3@rGO composite in context of green energy adaptation. Fuel 2023, 332, 126265. [Google Scholar] [CrossRef]
- Air Pollution from Ships. Available online: https://www.transportenvironment.org/what-we-do/shipping/air-pollution-ships (accessed on 20 January 2018).
- Zhao, T.T.; Chen, M.W.; Lee, H. A Study on the Framework for Estimating Ship Air Pollutant Emissions-Focusing on Ports of South Korea. Atmosphere 2022, 13, 1141. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, Q.J.; Lv, Z.Y.; Zhang, Y.J.; Yang, Z.W.; Fu, F.; Lv, J.H.; Wu, L.; Mao, H.J. Efficiency of DECA on ship emission and urban air quality: A case study of China port. J. Clean. Prod. 2022, 362, 132556. [Google Scholar] [CrossRef]
- Lopez-Aparicio, S.; Tonnesen, D.; Thanh, T.N.; Neilson, H. Shipping emissions in a Nordic port: Assessment of mitigation strategies. Transp. Res. Part D Transp. Environ. 2017, 53, 205–216. [Google Scholar] [CrossRef]
- Weng, J.X.; Shi, K.; Gan, X.F.; Li, G.R.; Huang, Z. Ship emission estimation with high spatial-temporal resolution in the Yangtze River estuary using AIS data. J. Clean. Prod. 2020, 248, 119297. [Google Scholar] [CrossRef]
- Contini, D.; Merico, E. Recent Advances in Studying Air Quality and Health Effects of Shipping Emissions. Atmosphere 2021, 12, 92. [Google Scholar] [CrossRef]
- Xu, L.; Wen, Y.T.; Luo, X.Y.; Lu, Z.G.; Guan, X.P. A modified power management algorithm with energy efficiency and GHG emissions limitation for hybrid power ship system? Appl. Energy 2022, 317, 119114. [Google Scholar] [CrossRef]
- UNCTAD. Review of Maritime Transport 2022. Available online: https://unctad.org/system/files/official-document/rmt2022_en.pdf (accessed on 27 January 2022).
- Li, Y.; Zhang, Y.L.; Cheng, J.X.; Zheng, C.H.; Li, M.J.; Xu, H.L.; Wang, R.J.; Chen, D.S.; Wang, X.T.; Fu, X.Y.; et al. Comparative Analysis, Use Recommendations, and Application Cases of Methods for Develop Ship Emission Inventories. Atmosphere 2022, 13, 1224. [Google Scholar] [CrossRef]
- Kosmas, V.; Acciaro, M. Bunker levy schemes for greenhouse gas (GHG) emission reduction in international shipping. Transp. Res. Part D Transp. Environ. 2017, 57, 195–206. [Google Scholar] [CrossRef]
- Chen, L.Y.; Yip, T.L.; Mou, J.M. Provision of Emission Control Area and the impact on shipping route choice and ship emissions. Transp. Res. Part D Transp. Environ. 2018, 58, 280–291. [Google Scholar] [CrossRef]
- Bouman, E.A.; Lindstad, E.; Rialland, A.I.; Stromman, A.H. State-of-the-art technologies, measures, and potential for reducing GHG emissions from shipping—A review. Transp. Res. Part D Transp. Environ. 2017, 52, 408–421. [Google Scholar] [CrossRef]
- Gilbert, P.; Walsh, C.; Traut, M.; Kesieme, U.; Pazouki, K.; Murphy, A. Assessment of full life-cycle air emissions of alternative shipping fuels. J. Clean. Prod. 2018, 172, 855–866. [Google Scholar] [CrossRef]
- Tian, Y.J.; Ren, L.L.; Wang, H.Y.; Li, T.; Yuan, Y.P.; Zhang, Y. Impact of AIS Data Thinning on Ship Air Pollutant Emissions Inventories. Atmosphere 2022, 13, 1135. [Google Scholar] [CrossRef]
- Gronoff, G.; Robinson, J.; Berkoff, T.; Swap, R.; Farris, B.; Schroeder, J.; Halliday, H.S.; Knepp, T.; Spinei, E.; Carrion, W.; et al. A method for quantifying near range point source induced O-3 titration events using Co-located Lidar and Pandora measurements. Atmos. Environ. 2019, 204, 43–52. [Google Scholar] [CrossRef]
- Nguyen, P.N.; Woo, S.H.; Kim, H. Ship emissions in hotelling phase and loading/unloading in Southeast Asia ports. Transp. Res. Part D Transp. Environ. 2022, 105, 103223. [Google Scholar] [CrossRef]
- Anand, A.; Wei, P.; Gali, N.K.; Sun, L.; Yang, F.H.; Westerdahl, D.; Zhang, Q.; Deng, Z.Q.; Wang, Y.; Liu, D.G.; et al. Protocol development for real-time ship fuel sulfur content determination using drone based plume sniffing microsensor system. Sci. Total Environ. 2020, 744, 140885. [Google Scholar] [CrossRef] [PubMed]
- Sun, P.Z.H.; Luo, X.S.; Zuo, T.Y.; Bao, Y.G.; Sun, Y.N.; Law, R.; Wu, E.Q. Emission Monitoring Dispatching of Drones Under Vessel Speed Fluctuation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21833–21847. [Google Scholar] [CrossRef]
- Xia, J.; Wang, K.; Wang, S.A. Drone scheduling to monitor vessels in emission control areas. Transp. Res. Part B Methodol. 2019, 119, 174–196. [Google Scholar] [CrossRef]
- Nikopoulou, Z. Incremental costs for reduction of air pollution from ships: A case study on North European emission control area. Marit. Policy Manag. 2017, 44, 1056–1077. [Google Scholar] [CrossRef]
- Gu, Y.W.; Wallace, S.W. Scrubber: A potentially overestimated compliance method for the Emission Control Areas The importance of involving a ship’s sailing pattern in the evaluation. Transp. Res. Part D Transp. Environ. 2017, 55, 51–66. [Google Scholar] [CrossRef]
- Dragovic, B.; Tzannatos, E.; Tselentis, V.; Mestrovic, R.; Skuric, M. Ship emissions and their externalities in cruise ports. Transp. Res. Part D Transp. Environ. 2018, 61, 289–300. [Google Scholar] [CrossRef]
- Zhen, L.; Li, M.; Hu, Z.; Lv, W.Y.; Zhao, X. The effects of emission control area regulations on cruise shipping. Transp. Res. Part D Transp. Environ. 2018, 62, 47–63. [Google Scholar] [CrossRef]
- Linder, A. Explaining shipping company participation in voluntary vessel emission reduction programs. Transp. Res. Part D Transp. Environ. 2018, 61, 234–245. [Google Scholar] [CrossRef]
- Huang, L.; Wen, Y.Q.; Geng, X.Q.; Zhou, C.H.; Xiao, C.S. Integrating multi-source maritime information to estimate ship exhaust emissions under wind, wave and current conditions. Transp. Res. Part D Transp. Environ. 2018, 59, 148–159. [Google Scholar] [CrossRef]
- Irannezhad, E.; Prato, C.G.; Hickman, M. The effect of cooperation among shipping lines on transport costs and pollutant emissions. Transp. Res. Part D Transp. Environ. 2018, 65, 312–323. [Google Scholar] [CrossRef]
- Zhang, Q.; Wan, Z.; Hemmings, B.; Abbasov, F. Reducing black carbon emissions from Arctic shipping: Solutions and policy implications. J. Clean. Prod. 2019, 241, 118261. [Google Scholar] [CrossRef]
- Chen, Q.; Ge, Y.E.; Ng, A.K.Y.; Lau, Y.Y.; Tao, X.Z. Implications of Arctic shipping emissions for marine environment. Marit. Policy Manag. 2022, 49, 155–180. [Google Scholar] [CrossRef]
- Chen, Q.; Lau, Y.Y.; Ge, Y.E.; Dulebenets, M.A.; Kawasaki, T.; Ng, A.K.Y. Interactions between Arctic passenger ship activities and emissions. Transp. Res. Part D Transp. Environ. 2021, 97, 102925. [Google Scholar] [CrossRef]
- Peng, X.; Wen, Y.Q.; Wu, L.C.; Xiao, C.S.; Zhou, C.H.; Han, D. A sampling method for calculating regional ship emission inventories. Transp. Res. Part D Transp. Environ. 2020, 89, 102617. [Google Scholar] [CrossRef]
- Poulsen, R.T.; Sampson, H. A swift turnaround? Abating shipping greenhouse gas emissions via port call optimization. Transp. Res. Part D Transp. Environ. 2020, 86, 102460. [Google Scholar] [CrossRef]
- Huang, L.; Wen, Y.Q.; Zhang, Y.M.; Zhou, C.H.; Zhang, F.; Yang, T.T. Dynamic calculation of ship exhaust emissions based on real-time AIS data. Transp. Res. Part D Transp. Environ. 2020, 80, 102277. [Google Scholar] [CrossRef]
- Xu, H.; Yang, D. LNG-fuelled container ship sailing on the Arctic Sea: Economic and emission assessment. Transp. Res. Part D Transp. Environ. 2020, 87, 102556. [Google Scholar] [CrossRef]
- Jiang, H.; Peng, D.; Wang, Y.J.; Fu, M.L. Comparison of Inland Ship Emission Results from a Real-World Test and an AIS-Based Model. Atmosphere 2021, 12, 1611. [Google Scholar] [CrossRef]
- Kong, Q.X.; Jiang, C.M.; Ng, A.K.Y. The economic impacts of restricting black carbon emissions on cargo shipping in the Polar Code Area. Transp. Res. Part A Policy Pract. 2021, 147, 159–176. [Google Scholar] [CrossRef]
- Cheaitou, A.; Faury, O.; Etienne, L.; Fedi, L.; Rigot-Mueller, P.; Stephenson, S. Impact of CO2 emission taxation and fuel types on Arctic shipping attractiveness. Transp. Res. Part D Transp. Environ. 2022, 112, 103491. [Google Scholar] [CrossRef]
- Schwarzkopf, D.A.; Petrik, R.; Matthias, V.; Quante, M.; Yu, G.Y.; Zhang, Y. Comparison of the Impact of Ship Emissions in Northern Europe and Eastern China. Atmosphere 2022, 13, 894. [Google Scholar] [CrossRef]
- Doundoulakis, E.; Papaefthimiou, S. A comparative methodological approach for the calculation of ships air emissions and fuel-energy consumption in two major Greek ports. Marit. Policy Manag. 2022, 49, 1135–1154. [Google Scholar] [CrossRef]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppa, J.; Saari, H.; Polonen, I.; Imai, N.N.; et al. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Dabrowski, P.S.; Specht, C.; Specht, M.; Burdziakowski, P.; Makar, A.; Lewicka, O. Integration of Multi-Source Geospatial Data from GNSS Receivers, Terrestrial Laser Scanners, and Unmanned Aerial Vehicles. Can. J. Remote Sens. 2021, 47, 621–634. [Google Scholar] [CrossRef]
- Molina, P.; Colomina, I.; Vitoria, T.; Silva, P.F.; Skaloud, J.; Kornus, W.; Prades, R.; Aguilera, C. Searching Lost People with UAVs: The System and Results of the Close-search Project. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 441–446. [Google Scholar] [CrossRef]
- Caric, H.; Cukrov, N.; Omanovic, D. Nautical Tourism in Marine Protected Areas (MPAs): Evaluating an Impact of Copper Emission from Antifouling Coating. Sustainability 2021, 13, 11897. [Google Scholar] [CrossRef]
- Kezoudi, M.; Keleshis, C.; Antoniou, P.; Biskos, G.; Bronz, M.; Constantinides, C.; Desservettaz, M.; Gao, R.S.; Girdwood, J.; Harnetiaux, J.; et al. The Unmanned Systems Research Laboratory (USRL): A New Facility for UAV-Based Atmospheric Observations. Atmosphere 2021, 12, 1042. [Google Scholar] [CrossRef]
- Zhou, F.; Liu, J.; Zhu, H.; Yang, X.D.; Fan, Y.L. A Real-Time Measurement-Modeling System for Ship Air Pollution Emission Factors. J. Mar. Sci. Eng. 2022, 10, 760. [Google Scholar] [CrossRef]
- Sun, Z.H.; Luo, X.S.; Wu, E.D.Q.; Zuo, T.Y.; Tang, Z.R.; Zhuang, Z.L. Monitoring Scheduling of Drones for Emission Control Areas: An Ant Colony-Based Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11699–11709. [Google Scholar] [CrossRef]
- Haugen, M.J.; Gkantonas, S.; El Helou, I.; Pathania, R.; Mastorakos, E.; Boies, A.M. Measurements and modelling of the three-dimensional near-field dispersion of particulate matter emitted from passenger ships in a port environment. Atmos. Env. 2022, 290, 119384. [Google Scholar] [CrossRef]
- Syswerda, G. Schedule Optimization Using Genetic Algorithms; Van Nostran Reinhold: New York, NY, USA, 1990. [Google Scholar]
- Gen, M.; Cheng, R. Genetic Algorithms and Engineering Design; John Wily and Sons: New York, NY, USA, 1997. [Google Scholar]
- Ben-Hakoun, E.; Van De Voorde, E.; Shiftan, Y. Marine environmental emission reduction policy in the liner shipping the economic impact from trade lane perspective. Marit. Policy Manag. 2021, 48, 725–753. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Research Problem | Research Method | Region/Port |
|---|---|---|---|
| [6] | Assess ship emissions mitigation strategies | Comparison analysis | Oslo Port |
| [22] | Cost of reducing ship emissions | Qualitative analysis | North European |
| [23] | Sulfur emissions and ship sailing patterns | Lifespan cost evaluation | ECAs |
| [24] | Estimate ship emissions | Activity-based method | Ports of Dubrovnik and Kotor |
| [25] | Effect of ECA policy on cruise shipping | MILP and tabu search | ECAs |
| [26] | Voluntary participation in emission reduction programs | Qualitative analysis | Ports of Los Angeles and Long Beach |
| [27] | Estimate ship emissions | Activity-based method | Ningbo-Zhoushan Port |
| [28] | Effect of shipping lines cooperation on emissions | Simulation | Brisbane Port |
| [29] | Solutions and policy for reducing emissions | Comprehensive analysis | Arctic region |
| [30] | Estimate ship emissions | AIS data-driven analysis | Arctic region |
| [31] | Interactions between ship activities and pollutants | Data-driven analysis | Arctic region |
| [32] | Regional ship emission inventories | Random sampling and activity-based method | Yangtze river |
| [7] | Estimate ship emissions | AIS data-driven and the STEAM model | Yangtze River |
| [33] | Ship emissions and the ships’ waiting times for berthing | Real-time traffic information, Port call optimization | Port area |
| [34] | Dynamic calculation of ship exhaust emissions | Activity-based method, Dynamic inventory | Shenzhen Port |
| [35] | Emission reduction of LNG-fueled container ships | Profit model, economic feasibility analysis | Northern Sea Route |
| [36] | Comparison of inland ship emissions | AIS data-driven analysis | China |
| [37] | Economic impacts of restricting emissions on shipping | Quantitative analysis | Arctic sea |
| [38] | Emission taxation policy | Risk analysis | Northern Sea Route |
| [39] | Regional comparison of ship emissions | Comparison analysis | Europe, China |
| [11] | Develop ship emission inventories | Comparison analysis | China ports |
| [4] | Estimate ship emissions | Vessel traffic system data | South Korea |
| [40] | Estimate ship emissions and fuel-energy consumption | Regression analysis | Greek ports |
| Study | Research Problem | Research Methods |
|---|---|---|
| [17] | Detection and characterization of near-range combustion plume events. | The integrated LiDAR-Pandora colocated technique; the combined remote sensing approach. |
| [21] | Monitor ships in ECAs. | Model the dynamics of each sailing ship using drones; build a time-expanded network and solve it by the Lagrangian relaxation-based method. |
| [19] | Plume-sniffing microsensor protocol. | A drone communication system; measurement accuracy in simulated conditions and real-world scenarios. |
| [44] | Relationship between ship traffic and emission density. | A mapping of maritime traffic by counting transits, radar imagery, and drone photography. |
| [45] | The scientific potential of drone-based measurements in the atmospheric sciences. | Drone-sensor systems integrated with Earth observation networks. |
| [46] | Measure ship emission factors in various weather scenarios. | A real-time monitoring system using drone; a modeling and information system. |
| [20] | Dispatching drones for emission monitoring. | Reinforcement learning. |
| [47] | Drone scheduling problem. | Heuristics and intelligent algorithms. |
| [48] | Characterize maritime particle emissions in port areas. | A Gaussian plume dispersion model; the incompletely stirred reactor network method. |
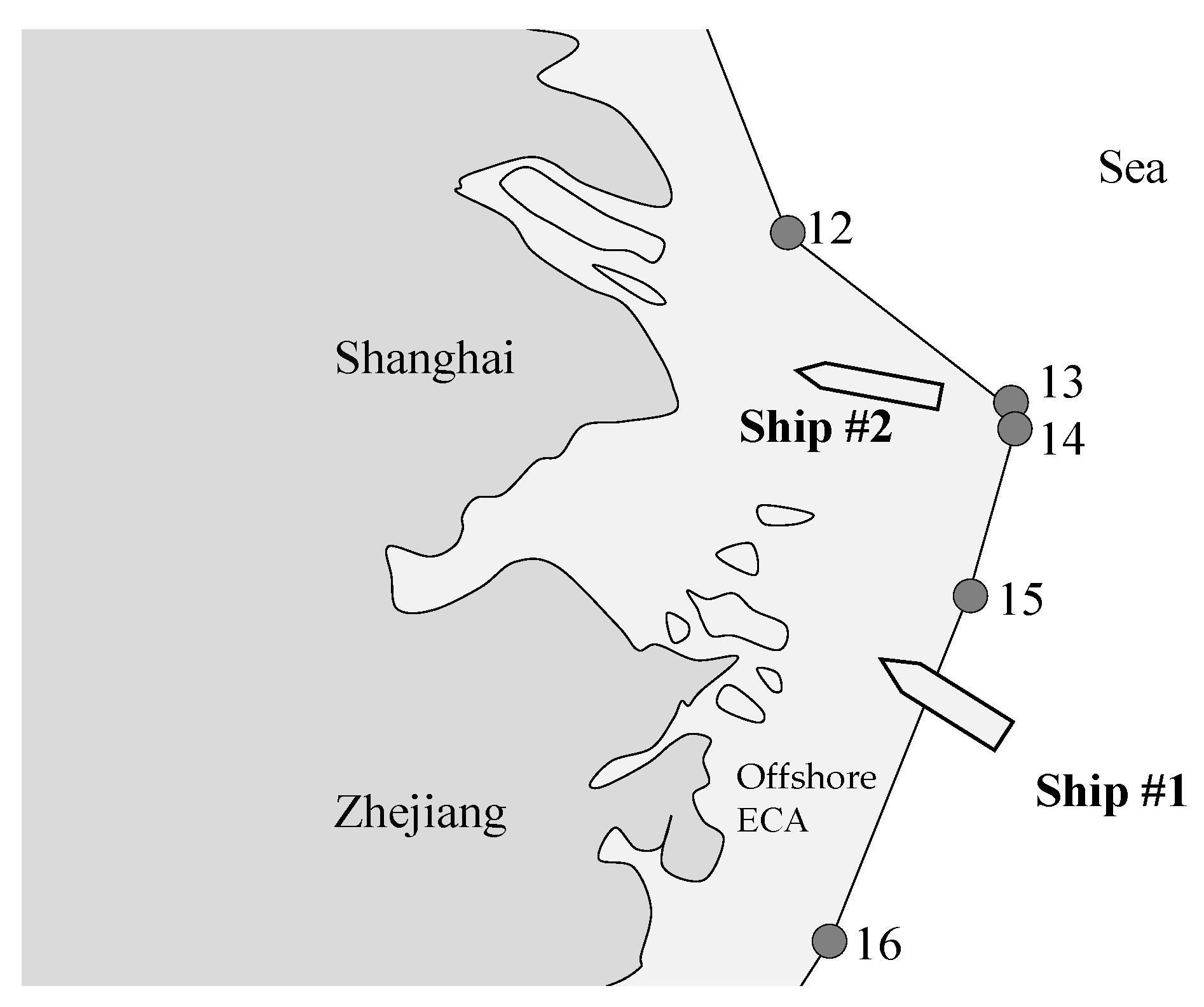
| No. | Longitude | Latitude |
|---|---|---|
| 12 | 122°26′42.00″ | 31°32′08.52′′ |
| 13 | 123°23′31.20″ | 30°49′15.96′′ |
| 14 | 123°24′36.00″ | 30°45′51.84′′ |
| 15 | 123°09′28.80″ | 30°05′43.44′′ |
| Ship | (km) | (km) | (km) | (km) | (km/s) | (km) | (km) | (s) | Sequence |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 9 | 10 | 15 | 0 | 5 | 10.62 | 7.30 | 126.44 | 3 |
| 2 | 17 | 9 | 16 | 0 | 6 | 16.38 | 3.42 | 146.50 | 5 |
| 3 | 8 | 7 | 0 | 10 | 5 | 6.04 | 7.73 | 212.49 | 1 |
| 4 | 4 | 9 | 16 | 0 | 9 | 7.63 | 6.28 | 86.13 | 2 |
| 5 | 15 | 9 | 11 | 0 | 7 | 12.76 | 3.95 | 158.71 | 4 |
| 6 | 1 | 6 | 4 | 0 | 6 | 1.55 | 4.90 | 205.48 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Z.-H.; Liu, T.-C.; Tian, X.-D. A Drone Routing Problem for Ship Emission Detection Considering Simultaneous Movements. Atmosphere 2023, 14, 373. https://doi.org/10.3390/atmos14020373
Hu Z-H, Liu T-C, Tian X-D. A Drone Routing Problem for Ship Emission Detection Considering Simultaneous Movements. Atmosphere. 2023; 14(2):373. https://doi.org/10.3390/atmos14020373
Chicago/Turabian StyleHu, Zhi-Hua, Tian-Ci Liu, and Xi-Dan Tian. 2023. "A Drone Routing Problem for Ship Emission Detection Considering Simultaneous Movements" Atmosphere 14, no. 2: 373. https://doi.org/10.3390/atmos14020373
APA StyleHu, Z.-H., Liu, T.-C., & Tian, X.-D. (2023). A Drone Routing Problem for Ship Emission Detection Considering Simultaneous Movements. Atmosphere, 14(2), 373. https://doi.org/10.3390/atmos14020373