


Improving Risk Projection and Mapping of Coastal Flood Hazards Caused by Typhoon-Induced Storm Surges and Extreme Sea Levels



Abstract
1. Introduction
2. Methods and Data Sources
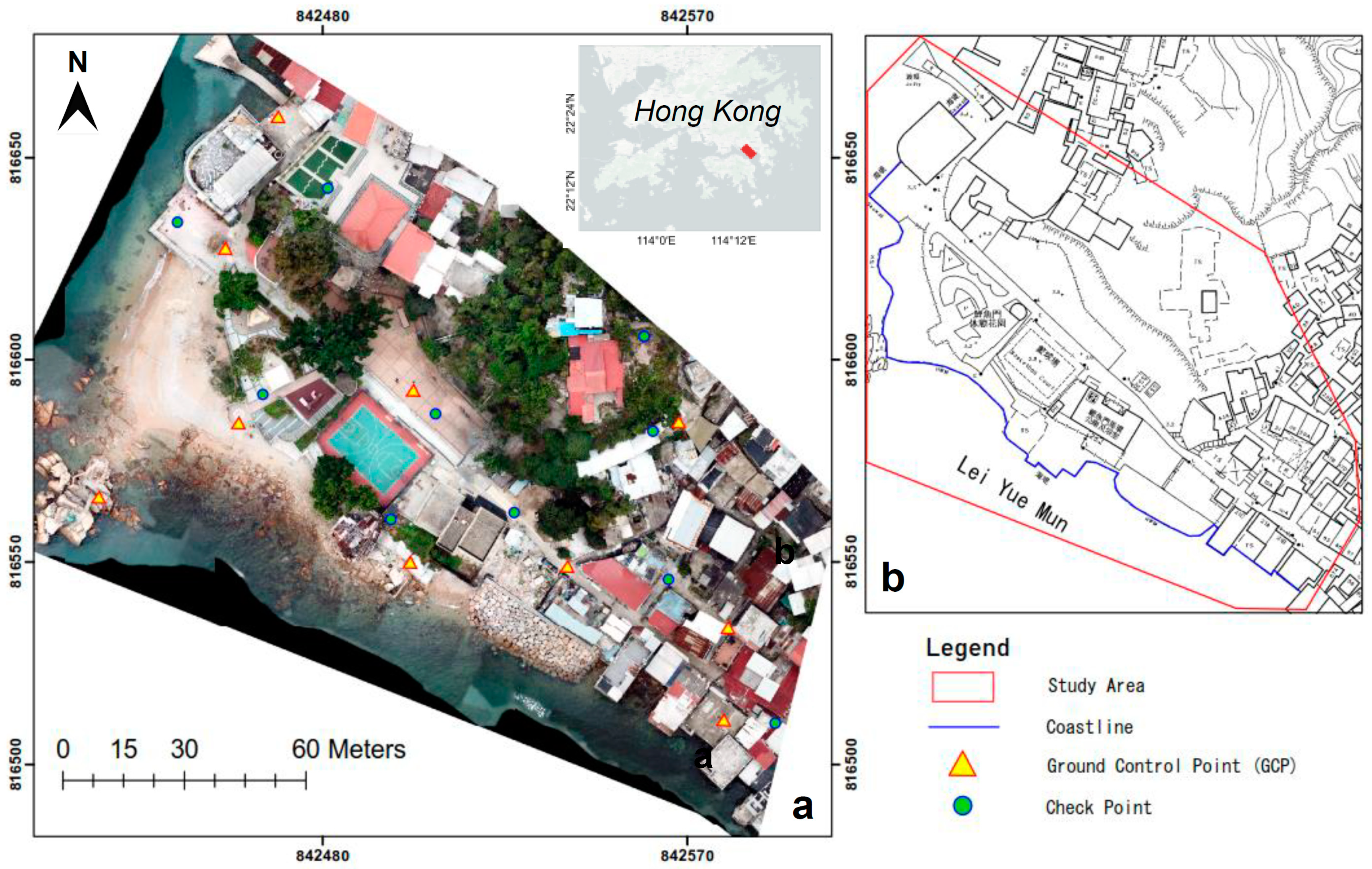
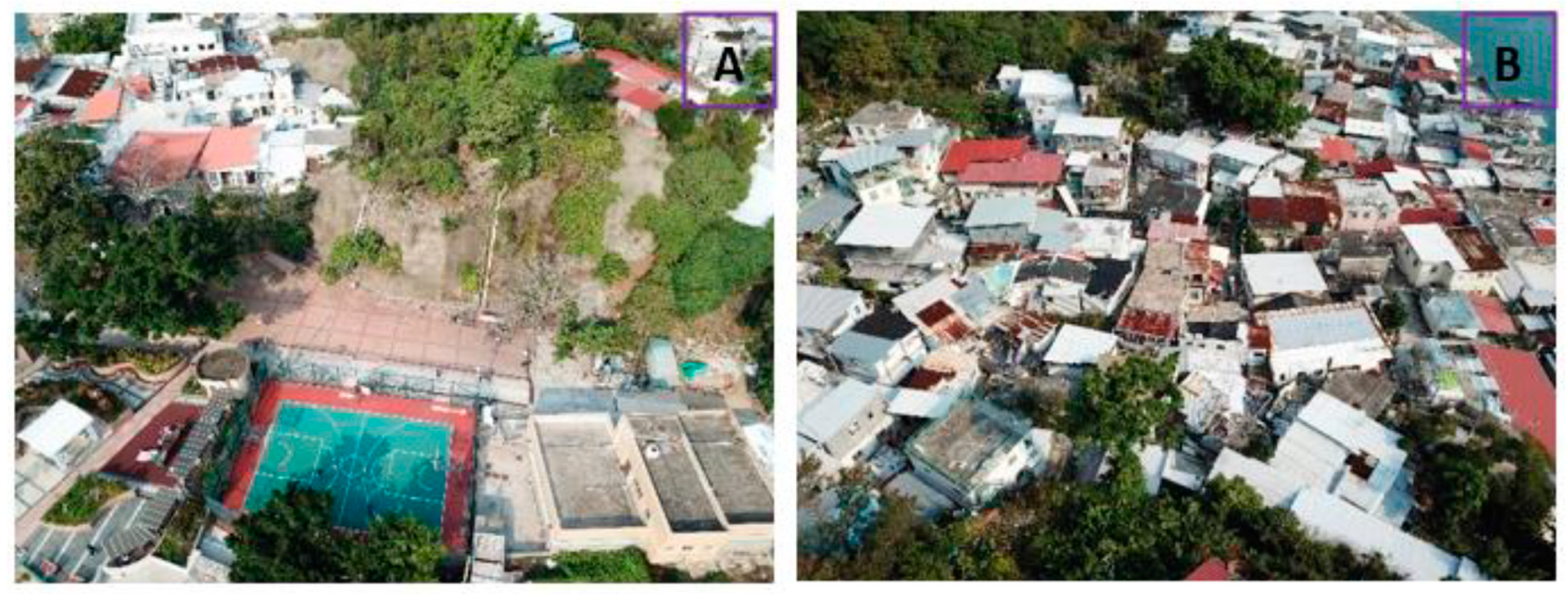
2.1. Study Area
2.2. UAV Survey Planning
2.3. Data Collection
2.4. Seawater Inundation Simulation and Evaluation
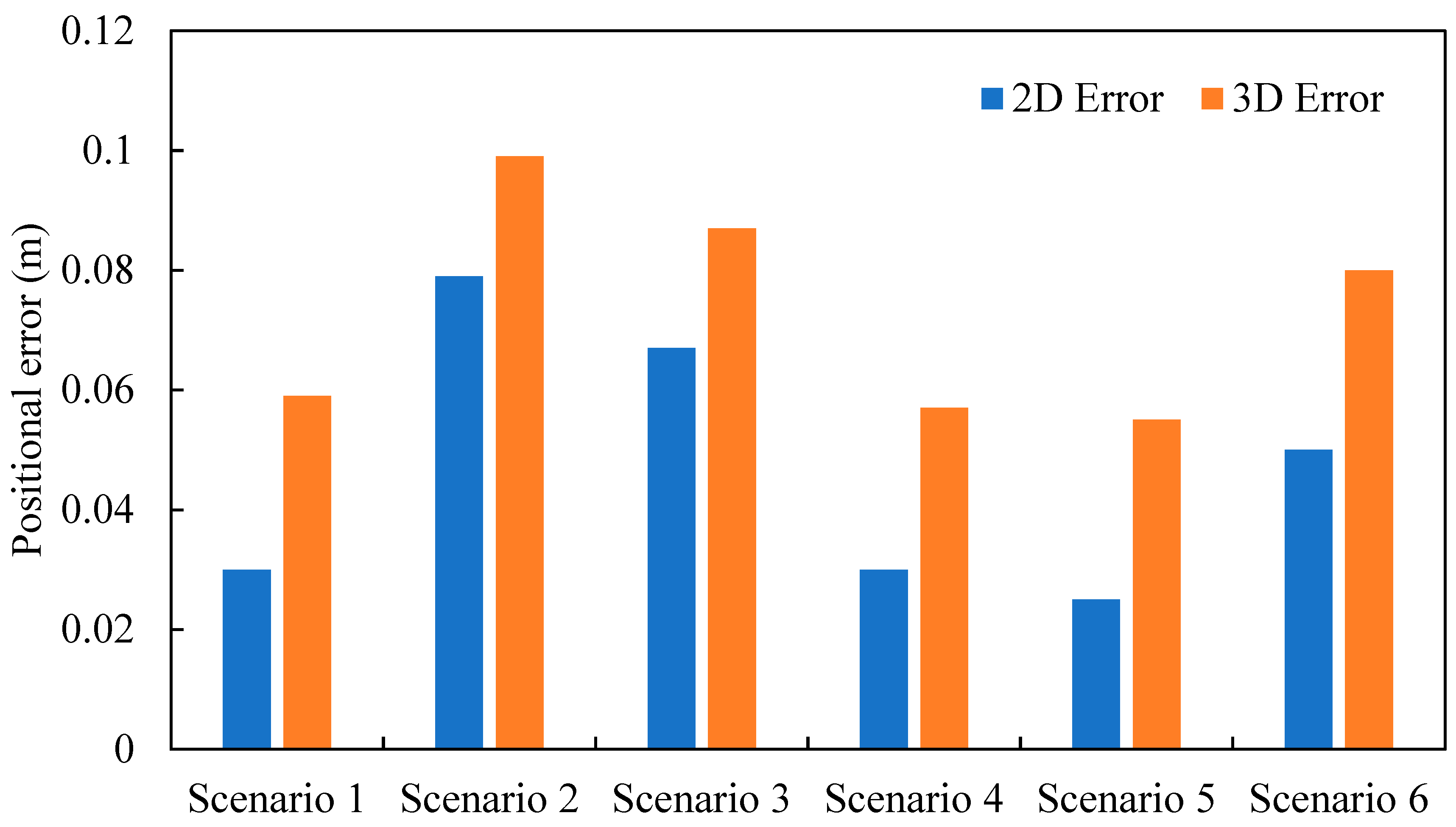
2.5. Evaluation Metrics
3. Results and Discussions
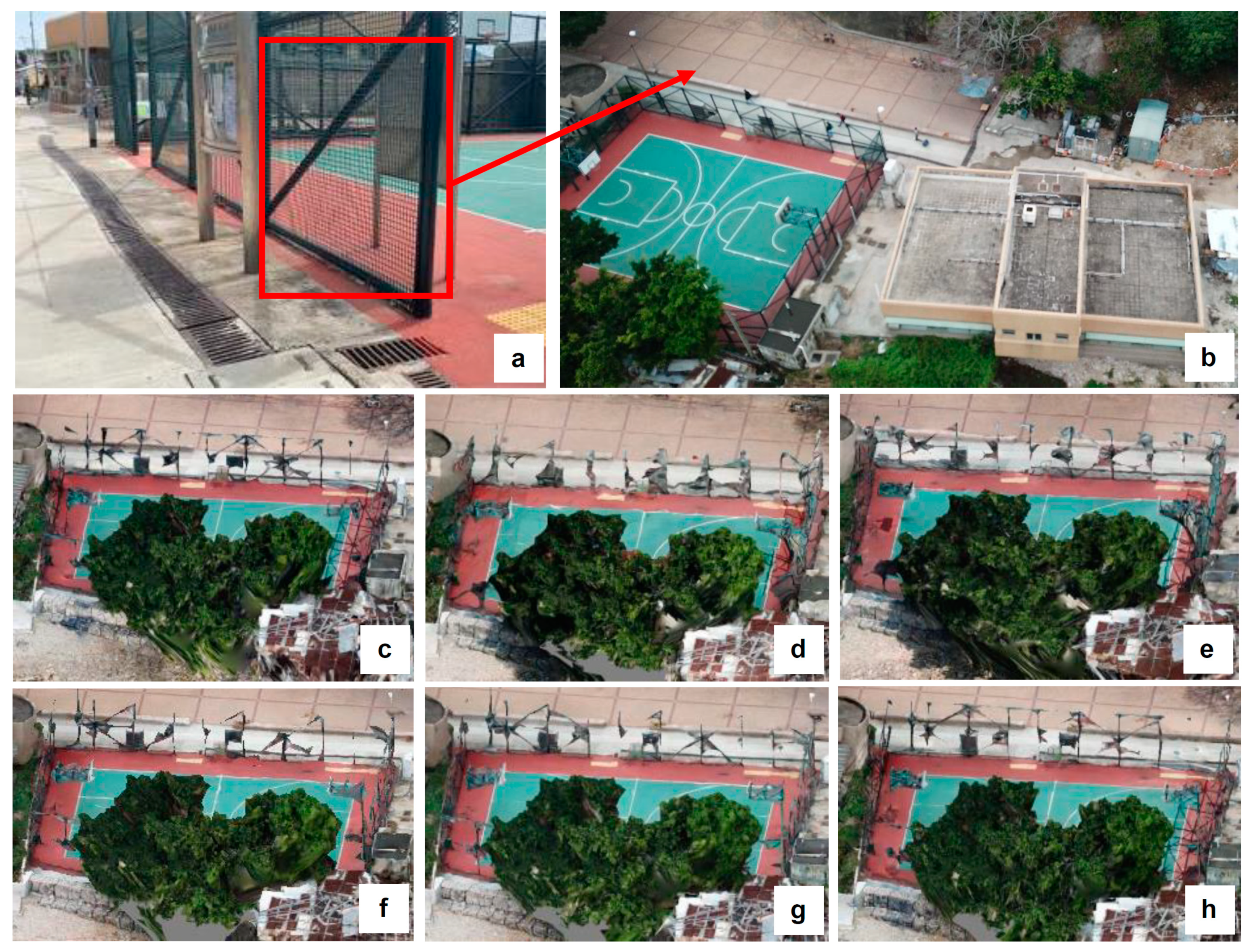
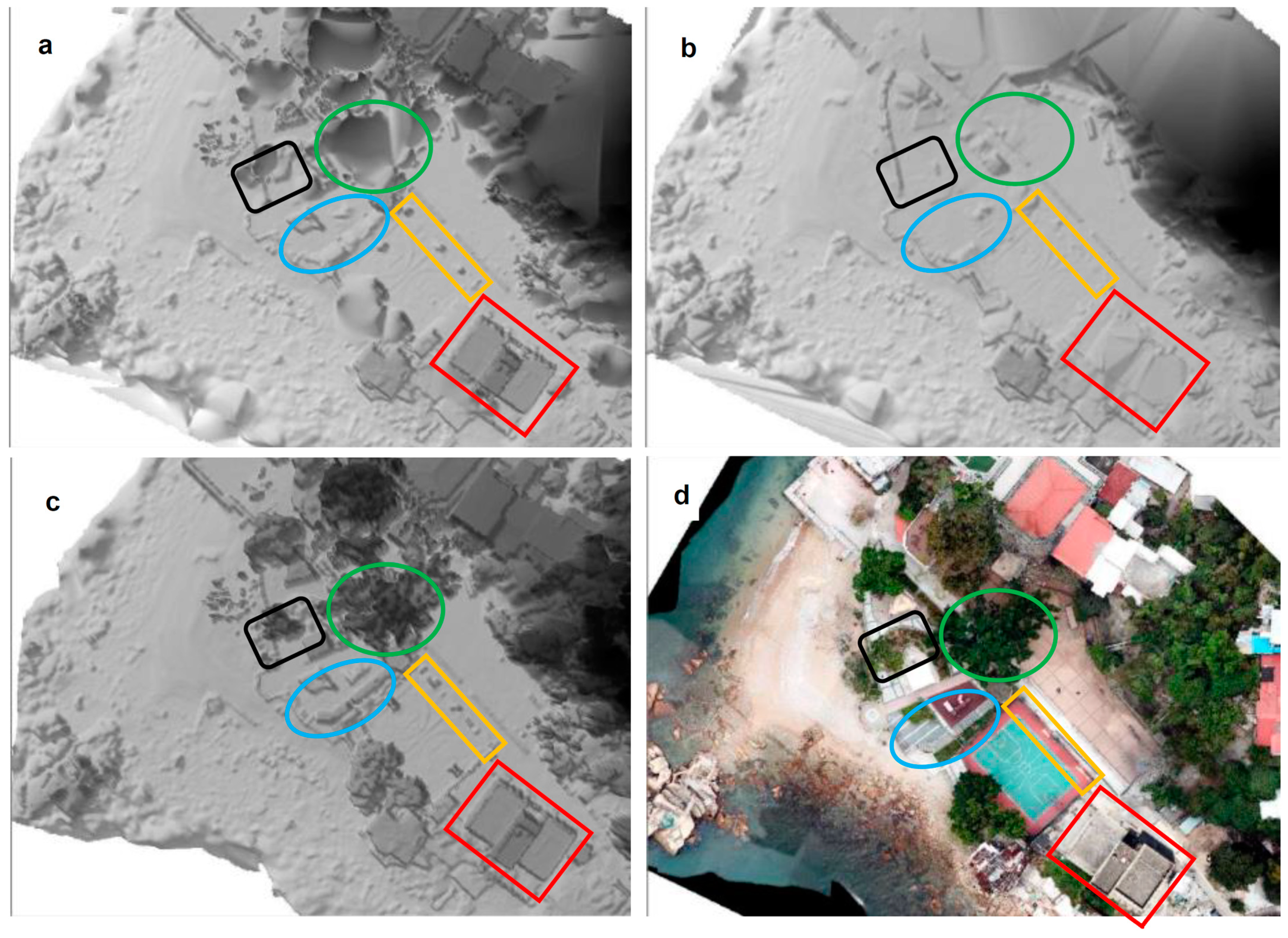
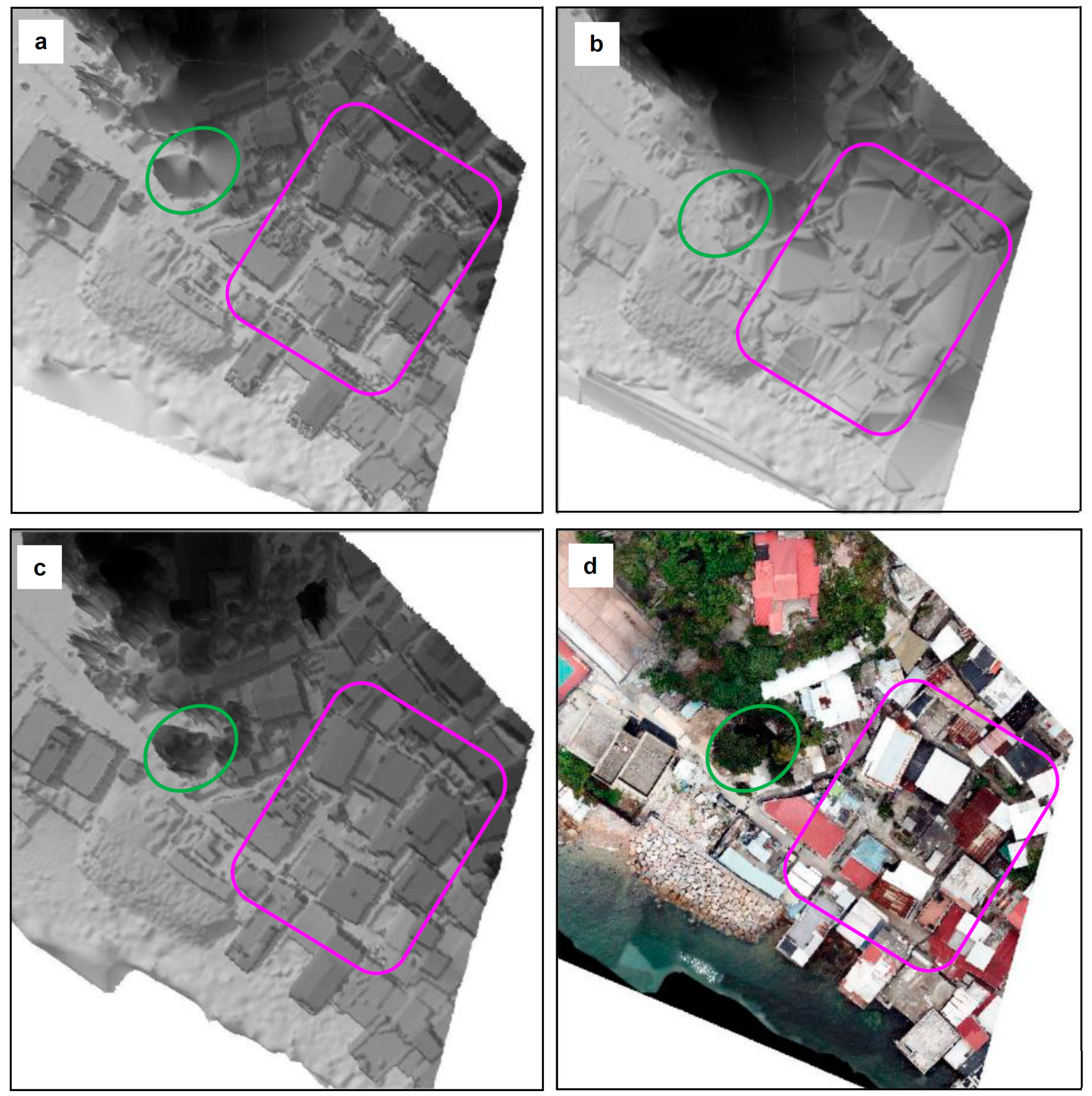
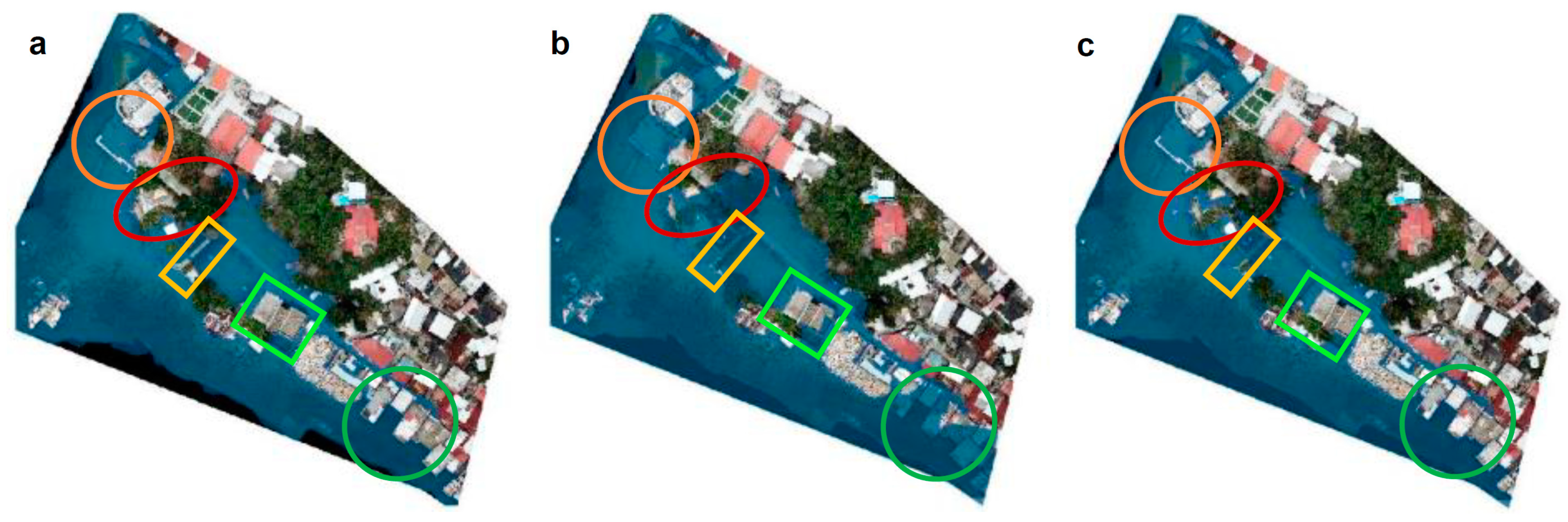
3.1. Accuracy Assessment and Texture Analysis of the 3D Mesh Model
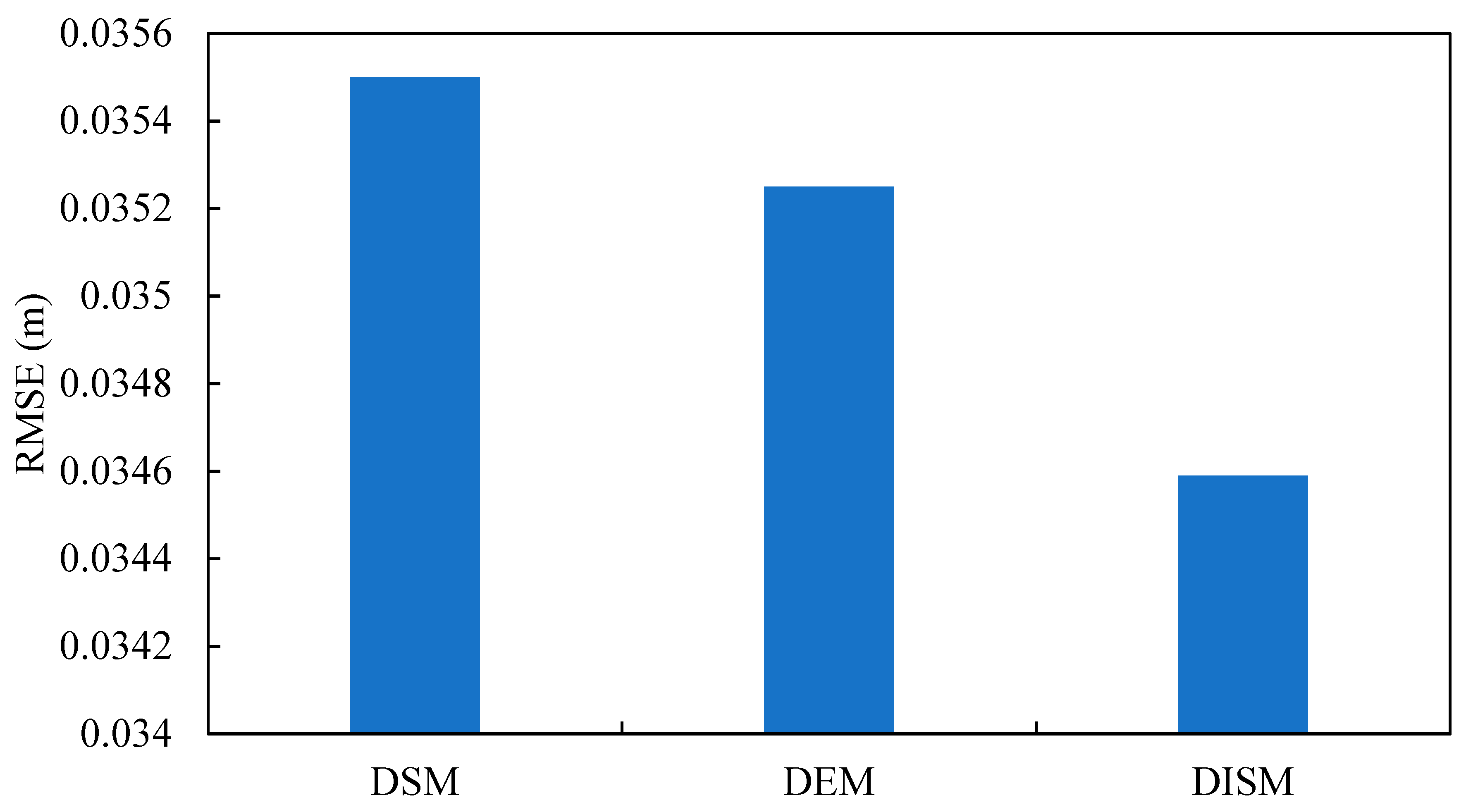
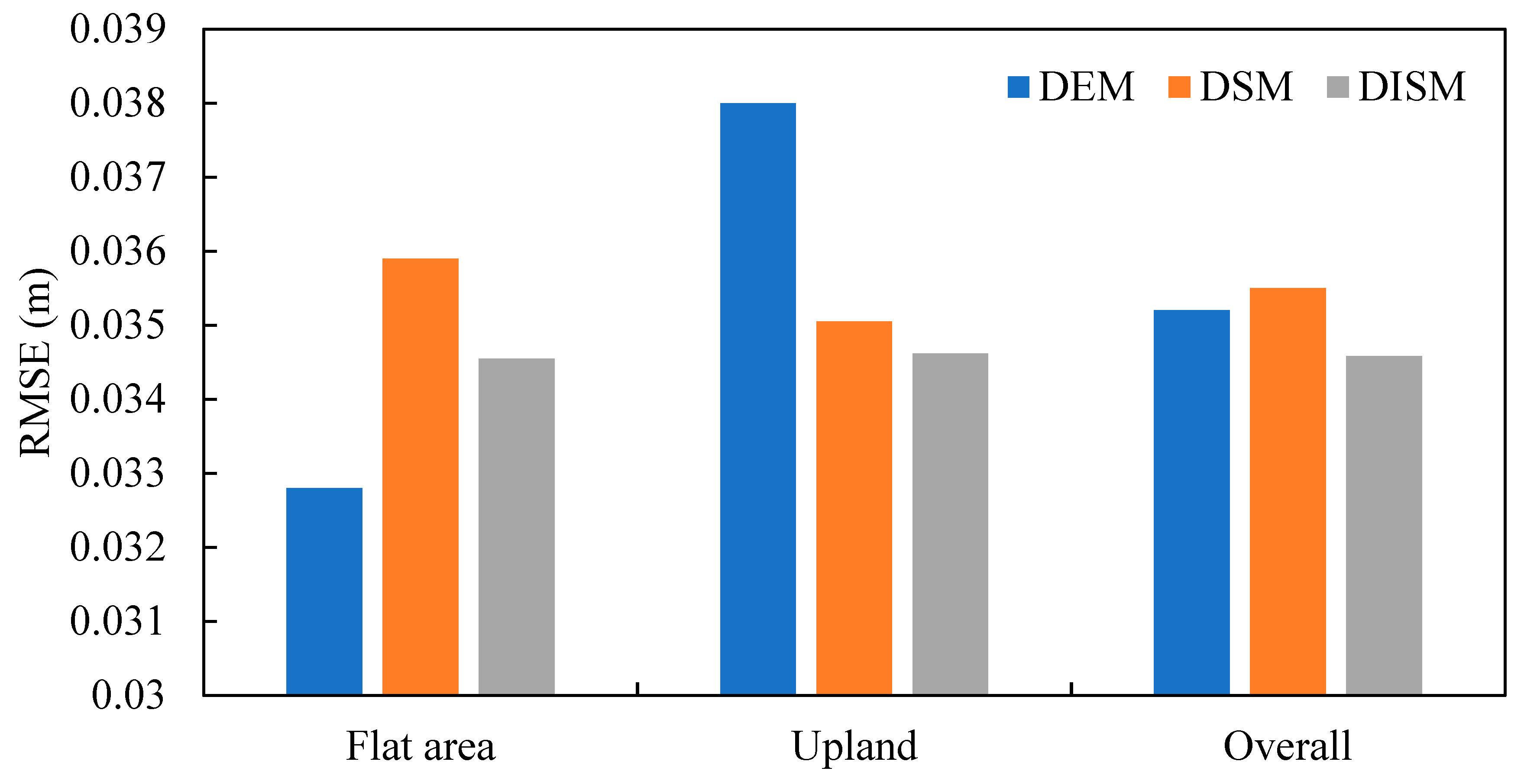
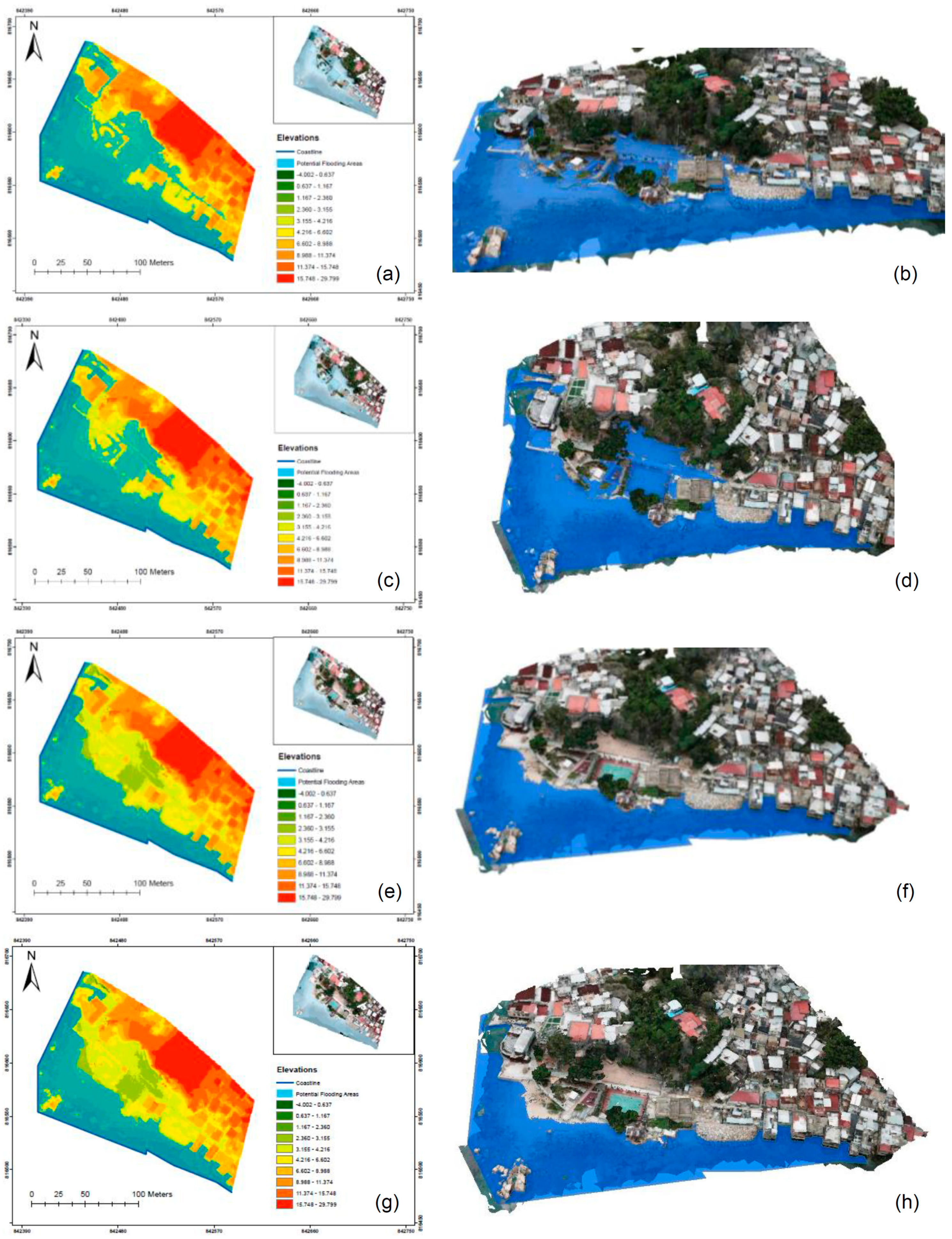
3.2. Comparison of the DISM, DSM and DEM
3.3. Evaluation of the Seawater Inundation Simulations
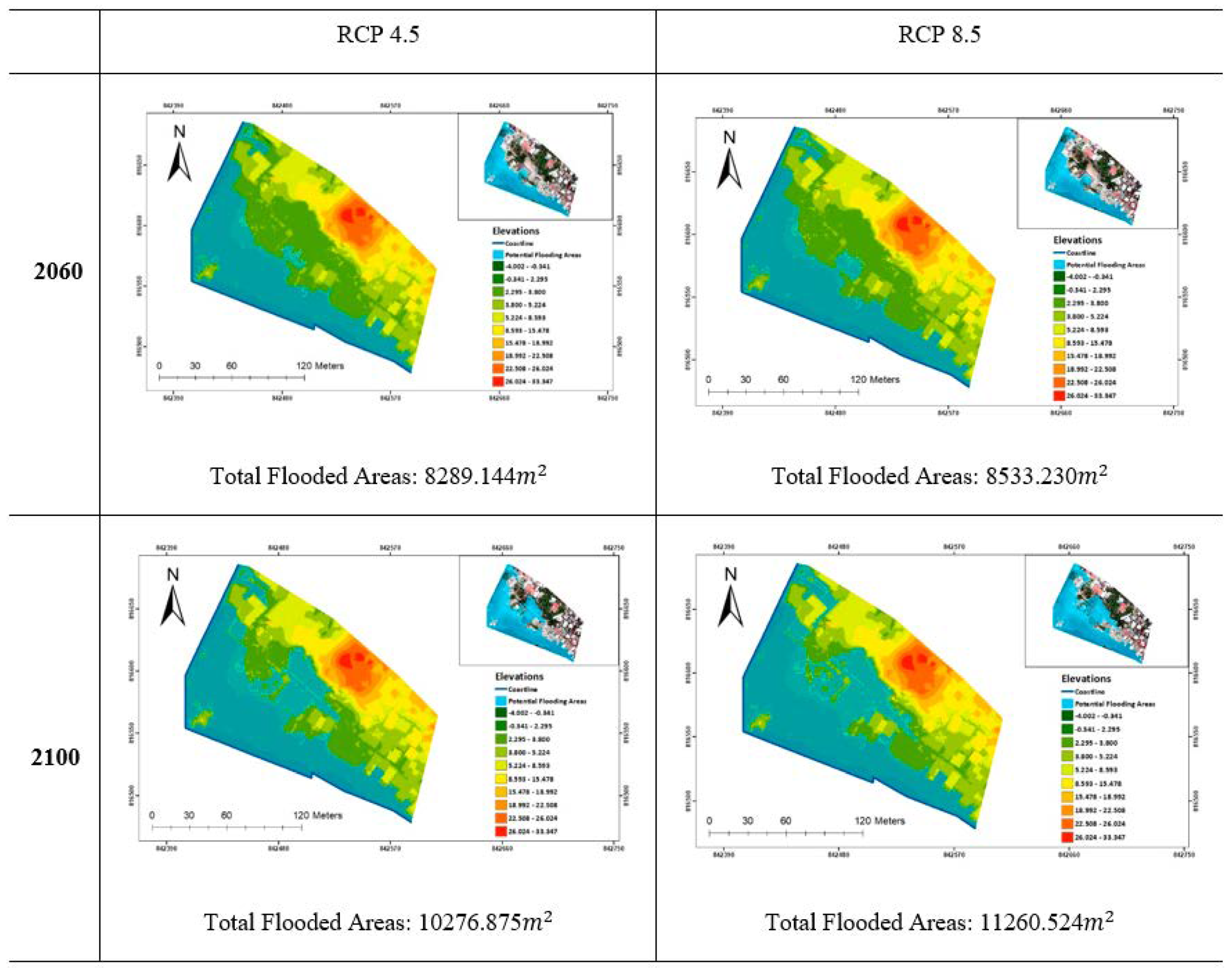
3.4. Projection of Coastal Flooding
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, B.; Wang, S. Probabilistic characterization of extreme storm surges induced by tropical cyclones. J. Geophys. Res. Atmos. 2021, 126, e2020JD033557. [Google Scholar] [CrossRef]
- Nicholls, R.J.; Lincke, D.; Hinkel, J.; Brown, S.; Vafeidis, A.T.; Meyssignac, B.; Hanson, S.E.; Merkens, J.-L.; Fang, J. A global analysis of subsidence, relative sea-level change and coastal flood exposure. Nat. Clim. Chang. 2021, 11, 338–342. [Google Scholar] [CrossRef]
- Gutmann, E.D.; Rasmussen, R.M.; Liu, C.; Ikeda, K.; Bruyere, C.L.; Done, J.M.; Garrè, L.; Friis-Hansen, P.; Veldore, V. Changes in hurricanes from a 13-yr convection-permitting pseudo- global warming simulation. J. Clim. 2018, 31, 3643–3657. [Google Scholar] [CrossRef]
- Yang, J.; Li, L.; Zhao, K.; Wang, P.; Wang, D.; Sou, I.M.; Yang, Z.; Hu, J.; Tang, X.; Mok, K.M.; et al. A comparative study of Typhoon Hato (2017) and Typhoon Mangkhut (2018)—Their impacts on coastal inundation in Macau. J. Geophys. Res. Ocean. 2019, 124, 9590–9619. [Google Scholar] [CrossRef]
- Gebrehiwot, A.A.; Hashemi-Beni, L. Three-dimensional inundation mapping using UAV image segmentation and digital surface model. ISPRS Int. J. Geo Inf. 2021, 10, 144. [Google Scholar] [CrossRef]
- Williams, L.L.; Lück-Vogel, M. Comparative assessment of the GIS based bathtub model and an enhanced bathtub model for coastal inundation. J. Coast. Conserv. 2020, 24, 23. [Google Scholar] [CrossRef]
- Kulp, S.A.; Strauss, B.H. New elevation data triple estimates of global vulnerability to sea-level rise and coastal flooding. Nat. Commun. 2019, 10, 4844. [Google Scholar] [CrossRef]
- Xu, K.; Fang, J.; Fang, Y.; Sun, Q.; Wu, C.; Liu, M. The Importance of digital elevation model selection in flood simulation and a proposed method to reduce DEM errors: A case study in Shanghai. Int. J. Disaster Risk Sci. 2021, 12, 890–902. [Google Scholar] [CrossRef]
- Karamuz, E.; Romanowicz, R.J.; Doroszkiewicz, J. The use of unmanned aerial vehicles in flood hazard assessment. J. Flood Risk Manag. 2020, 13, e12622. [Google Scholar] [CrossRef]
- Shen, J.; Tan, F.; Zhang, Y. Improved building treatment approach for urban inundation modeling: A case study in Wuhan, China. Water 2018, 10, 1760. [Google Scholar] [CrossRef]
- Parizi, E.; Khojeh, S.; Hosseini, S.M.; Moghadam, Y.J. Application of unmanned aerial vehicle DEM in flood modeling and comparison with global DEMs: Case study of Atrak river basin, Iran. J. Environ. Manage 2022, 317, 115492. [Google Scholar] [CrossRef] [PubMed]
- Annis, A.; Nardi, F.; Petroselli, A.; Apollonio, C.; Arcangeletti, E.; Tauro, F.; Belli, C.; Bianconi, R.; Grimaldi, S. UAV-DEMs for small-scale flood hazard mapping. Water 2020, 12, 1717. [Google Scholar] [CrossRef]
- Aral, M.M.; Chang, B. Spatial variation of sea level rise at Atlantic and Mediterranean coastline of Europe. Water 2017, 9, 522. [Google Scholar] [CrossRef]
- Griffin, J.; Latief, H.; Kongko, W.; Harig, S.; Horspool, N.; Hanung, R.; Rojali, A.; Maher, N.; Fuchs, A.; Hossen, J.; et al. An evaluation of onshore digital elevation models for modeling tsunami inundation zones. Front. Earth Sci. 2015, 3, 32. [Google Scholar] [CrossRef]
- Li, B.; Hou, J.; Li, D.; Yang, D.; Han, H.; Bi, X.; Wang, X.; Hinkelmann, R.; Xia, J. Application of LiDAR UAV for high-resolution flood modelling. Water Resour. Manag. 2021, 35, 1433–1447. [Google Scholar] [CrossRef]
- Kastridis, A.; Kirkenidis, C.; Sapountzis, M. An integrated approach of flash flood analysis in ungauged mediterranean watersheds using post-flood surveys and unmanned aerial vehicles. Hydrol. Process. 2020, 34, 4920–4939. [Google Scholar] [CrossRef]
- Yan, D.; Li, J.; Yao, X.; Luan, Z. Integrating UAV data for assessing the ecological response of spartina alterniflora towards inundation and salinity gradients in coastal wetland. Sci. Total Environ. 2022, 814, 152631. [Google Scholar] [CrossRef]
- Marks, K.; Bates, P. Integration of high-resolution topographic data with floodplain flow models. Hydrol. Process. 2000, 14, 2109–2122. [Google Scholar] [CrossRef]
- Castellarin, A.; Di Baldassarre, G.; Bates, P.D.; Brath, A. Optimal cross-sectional spacing in preissmann scheme 1D hydrodynamic models. J. Hydraul. Eng. 2009, 135, 96–105. [Google Scholar] [CrossRef]
- Muhadi, N.A.; Abdullah, A.F.; Bejo, S.K.; Mahadi, M.R.; Mijic, A. The use of LiDAR-derived DEM in flood applications: A review. Remote Sens. 2020, 12, 2308. [Google Scholar] [CrossRef]
- Pichon, L.; Ducanchez, A.; Fonta, H.; Tisseyre, B. Quality of digital elevation models obtained from unmanned aerial vehicles for precision viticulture. Oeno One 2016, 50, 101–111. [Google Scholar] [CrossRef]
- Dyer, J.L.; Moorhead, R.J.; Hathcock, L. Identification and analysis of microscale hydrologic flood impacts using unmanned aerial systems. Remote Sens. 2020, 12, 1549. [Google Scholar] [CrossRef]
- Munawar, H.S.; Ullah, F.; Qayyum, S.; Heravi, A. Application of deep learning on UAV-based aerial images for flood detection. Smart Cities 2021, 4, 1220–1243. [Google Scholar] [CrossRef]
- Wang, G.; Li, P.; Li, Z.; Ding, D.; Qiao, L.; Xu, J.; Li, G.; Wang, H. Coastal dam inundation assessment for the Yellow River Delta: Measurements, analysis and scenario. Remote Sens. 2020, 12, 3658. [Google Scholar] [CrossRef]
- Wang, X.; Xie, H. A review on applications of remote sensing and geographic information systems (GIS) in water resources and flood risk management. Water 2018, 10, 608. [Google Scholar] [CrossRef]
- Park, K.; Shibuo, Y.; Katayama, J.; Baba, S.; Furumai, H. Applicability of high-resolution geospatial data obtained by UAV photogrammetry to develop drainage system models for pluvial flood analysis. J. Disaster Res. 2021, 16, 371–380. [Google Scholar] [CrossRef]
- Trepekli, K.; Balstrøm, T.; Friborg, T.; Fog, B.; Allotey, A.N.; Kofie, R.Y.; Møller-Jensen, L. UAV-borne, LiDAR-based elevation modelling: A method for improving local-scale urban flood risk assessment. Nat. Hazards 2022, 113, 423–451. [Google Scholar] [CrossRef]
- Jakovljevic, G.; Govedarica, M.; Alvarez-Taboada, F.; Pajic, V. Accuracy assessment of deep learning based classification of LiDAR and UAV points clouds for DTM creation and flood risk mapping. Geosciences 2019, 9, 323. [Google Scholar] [CrossRef]
- Schumann, G.J.-P.; Muhlhausen, J.; Andreadis, K.M. Rapid mapping of small-scale river-floodplain environments using UAV SfM supports classical theory. Remote Sens. 2019, 11, 982. [Google Scholar] [CrossRef]
- Strauss, B.H.; Orton, P.M.; Bittermann, K.; Buchanan, M.K.; Gilford, D.M.; Kopp, R.E.; Kulp, S.; Massey, C.; de Moel, H.; Vinogradov, S. Economic damages from Hurricane Sandy attributable to sea level rise caused by anthropogenic climate change. Nat. Commun. 2021, 12, 2720. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Paron, P.; Reali, A.; Juizo, D.; Manane, J.; Brandimarte, L. Testing UAV-derived topography for hydraulic modelling in a tropical environment. Nat. Hazards 2020, 103, 139–163. [Google Scholar] [CrossRef]
- He, Y.H.; Mok, H.Y.; Lai, E.S.T. Projection of sea-level change in the vicinity of Hong Kong in the 21st century. Int. J. Climatol. 2016, 36, 3237–3244. [Google Scholar] [CrossRef]
- Barba, S.; Barbarella, M.; Di Benedetto, A.; Fiani, M.; Gujski, L.; Limongiello, M. Accuracy assessment of 3D photogrammetric models from an unmanned aerial vehicle. Drones 2019, 3, 79. [Google Scholar] [CrossRef]
- Lingua, A.; Noardo, F.; Spanò, A.; Sanna, S.; Matrone, F. 3D model generation using oblique images acquired by UAV. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-4/W2, 107–115. [Google Scholar] [CrossRef]
- Nesbit, P.; Hugenholtz, C. Enhancing UAV–SfM 3D model accuracy in high-relief landscapes by incorporating oblique images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of drone altitude, image overlap, and optical sensor resolution on multi-view reconstruction of forest images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef]
- Nagendran, S.K.; Tung, W.Y.; Mohamad Ismail, M.A. Accuracy assessment on low altitude UAV-borne photogrammetry outputs influenced by ground control point at different altitude. In IOP Conference Series: Earth and Environmental Science, Proceedings of the 9th IGRSM International Conference and Exhibition on Geospatial & Remote Sensing (IGRSM 2018), Kuala Lumpur, Malaysia, 24–25 April 2018; IOP Publishing: Bristol, UK, 2018; Volume 169, p. 012031. [Google Scholar]
- Mesas-Carrascosa, F.J.; García, M.D.N.; De Larriva, J.E.M.; García-Ferrer, A. An Analysis of the influence of flight parameters in the generation of unmanned aerial vehicle (UAV) orthomosaicks to survey archaeological areas. Sensors 2016, 16, 1838. [Google Scholar] [CrossRef]
- Gallagher, J. Learning about an infrequent event: Evidence from flood insurance take-up in the United States. Am. Econ. J. Appl. Econ. 2014, 6, 206–233. [Google Scholar] [CrossRef]
- Hu, B.; Chen, J.; Zhang, X. Monitoring the land subsidence area in a coastal urban area with InSAR and GNSS. Sensors 2019, 19, 3181. [Google Scholar] [CrossRef]
- Calafat, F.M.; Marcos, M. Probabilistic reanalysis of storm surge extremes in Europe. Proc. Natl. Acad. Sci. USA 2020, 117, 1877–1883. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, S.; Huang, G. Assessing climate change impacts on human-perceived temperature extremes and underlying uncertainties. J. Geophys. Res. Atmos. 2019, 124, 3800–3821. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S.; Wang, Y. Copula-based convection-permitting projections of future changes in multivariate drought characteristics. J. Geophys. Res. Atmos. 2019, 124, 7460–7483. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Y. Improving probabilistic hydroclimatic projections through high-resolution convection-permitting climate modeling and Markov chain Monte Carlo simulations. Clim. Dyn. 2019, 53, 1613–1636. [Google Scholar] [CrossRef]
- You, J.; Wang, S. Higher probability of occurrence of hotter and shorter heat waves followed by heavy rainfall. Geophys. Res. Lett. 2021, 48, e2021GL094831. [Google Scholar] [CrossRef]
- Qing, Y.; Wang, S.; Ancell, B.C.; Yang, Z.-L. Accelerating flash droughts induced by the joint influence of soil moisture depletion and atmospheric aridity. Nat. Commun. 2022, 13, 1139. [Google Scholar] [CrossRef]
- Qing, Y.; Wang, S. Multi-decadal convection-permitting climate projections for China’s Greater Bay Area and surroundings. Clim. Dyn. 2021, 57, 415–434. [Google Scholar] [CrossRef]
- Li, X.; Wang, S. Recent increase in the occurrence of snow droughts followed by extreme heatwaves in a warmer world. Geophys. Res. Lett. 2022, 49, e2022GL099925. [Google Scholar] [CrossRef]
- Chen, H.; Wang, S.; Wang, Y.; Zhu, J. Probabilistic projections of hydrological droughts through convection-permitting climate simulations and multimodel hydrological predictions. J. Geophys. Res. Atmos. 2020, 125, e2020JD032914. [Google Scholar] [CrossRef]
- Chen, H.; Wang, S. Accelerated transition between dry and wet periods in a warming climate. Geophys. Res. Lett. 2022, 49, e2022GL099766. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S.; Qing, Y.; Zhu, J.; Wang, D.; Liu, J. A vine copula-based polynomial chaos framework for improving multi-model hydroclimatic projections at a multi-decadal convection-permitting scale. Water Resour. Res. 2022, 58, e2022WR031954. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Flight Altitude (m) | Camera Angle (degree) | Path | Total Number of Images | GSD (cm/pixel) | Processing Time |
|---|---|---|---|---|---|---|
| 1 | 55 | 70 | Double grid | 274 | 1.92 | 1 h 34 min |
| 2 | 55 | 45 | Double grid | 277 | 2.56 | 1 h 31 min |
| 3 | 45 | 45 | Double grid | 392 | 2.09 | 2 h 17 min |
| 4 | 55 + 35 | 55 + 45 + 25 | Double grid | 533 | 2.72 | 2 h 55 min |
| 5 | 55 + 35 | 55 + 45 + 25 + 15 | Double grid | 633 | 4.44 | 3 h 50 min |
| 6 | 55 + 35 | 55 + 45 + 25 | Double grid + Circular | 350 | 2.25 | 2 h 4 min |
| Typhoon | Maximum Sea Level (mPD) | Simulated Flooding Area (m2) | Observed Flooding Area (m2) | Reliability |
|---|---|---|---|---|
| Mangkhut | 3.734 | 11,636.2 | 12,575.7 | 92.5% |
| Hato | 3.424 | 9729.2 | 11,015.6 | 88.3% |
| Wipha | 2.824 | 7888.4 | 8341.2 | 94.6% |
| Higos | 2.604 | 7780.7 | 8296.8 | 93.8% |
| Decade | RCP4.5 | RCP8.5 |
|---|---|---|
| 2051–2060 | +0.37 m | +0.43 m |
| 2091–2100 | +0.71 m | +0.98 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Zhang, B.; Chue, C.Y.; Wang, S. Improving Risk Projection and Mapping of Coastal Flood Hazards Caused by Typhoon-Induced Storm Surges and Extreme Sea Levels. Atmosphere 2023, 14, 52. https://doi.org/10.3390/atmos14010052
Shen Y, Zhang B, Chue CY, Wang S. Improving Risk Projection and Mapping of Coastal Flood Hazards Caused by Typhoon-Induced Storm Surges and Extreme Sea Levels. Atmosphere. 2023; 14(1):52. https://doi.org/10.3390/atmos14010052
Chicago/Turabian StyleShen, Yangshuo, Boen Zhang, Cheuk Ying Chue, and Shuo Wang. 2023. "Improving Risk Projection and Mapping of Coastal Flood Hazards Caused by Typhoon-Induced Storm Surges and Extreme Sea Levels" Atmosphere 14, no. 1: 52. https://doi.org/10.3390/atmos14010052
APA StyleShen, Y., Zhang, B., Chue, C. Y., & Wang, S. (2023). Improving Risk Projection and Mapping of Coastal Flood Hazards Caused by Typhoon-Induced Storm Surges and Extreme Sea Levels. Atmosphere, 14(1), 52. https://doi.org/10.3390/atmos14010052