


Prediction and Interpretation of Low-Level Wind Shear Criticality Based on Its Altitude above Runway Level: Application of Bayesian Optimization–Ensemble Learning Classifiers and SHapley Additive exPlanations




Abstract
1. Introduction
1.1. Low-Level Wind Shear: Pilots’ Invisible Enemy
1.2. Low-Level Wind Shear Detection Technologies
1.3. Ensemble Learning Classifiers and Interpretation
1.4. Research Process
2. Materials and Methods
2.1. Study Location
2.2. Data Processing from PIREPs and Hong Kong Observatory
2.3. Hybrid Bayesian Optimization–Ensemble Learning Classifier (BO-ELC)
2.3.1. Initialization
2.3.2. Fitness Function
2.3.3. Sequential Model-Based Optimization
2.3.4. Acquisition Function
2.3.5. Termination
2.4. Evaluation of BO-ELCs
2.5. BO-ELC Interpretation Using Shapley Additive exPlanations (SHAP)
3. Results and Discussion
3.1. Hyperparameter Tuning Using Bayesian Optimization
3.2. Performance Assessment of BO-ELCs
3.3. Sensitivity Analysis
3.3.1. Global Factors’ Importance and Contribution
3.3.2. Factor Dependence and Interaction
3.3.3. Local Factor Interpretation
4. Conclusions and Recommendations
- In the testing dataset, the BO-Random Forest classifier had the best overall performance of all BO-ELCs investigated in this study with an AUC-ROC of 0.759 and accuracy, precision, recall, F1-score, and AUC-PRC values of 0.714, 0.724, 0.710, 0.713, and 0.75, respectively.
- The performance of each individual BO-ELC varied marginally. Despite the fact that XGBoost’s AUC-ROC was 0.73, its accuracy, recall, precision, F1-score, and AUC-PRC values were 0.652, 0.656, 0.664, 0.656, and 0.68, respectively.
- The AdaBoost and LGBM models demonstrated the lowest AUC-ROC (0.687) and AUC-PRC (0.67) scores, respectively.
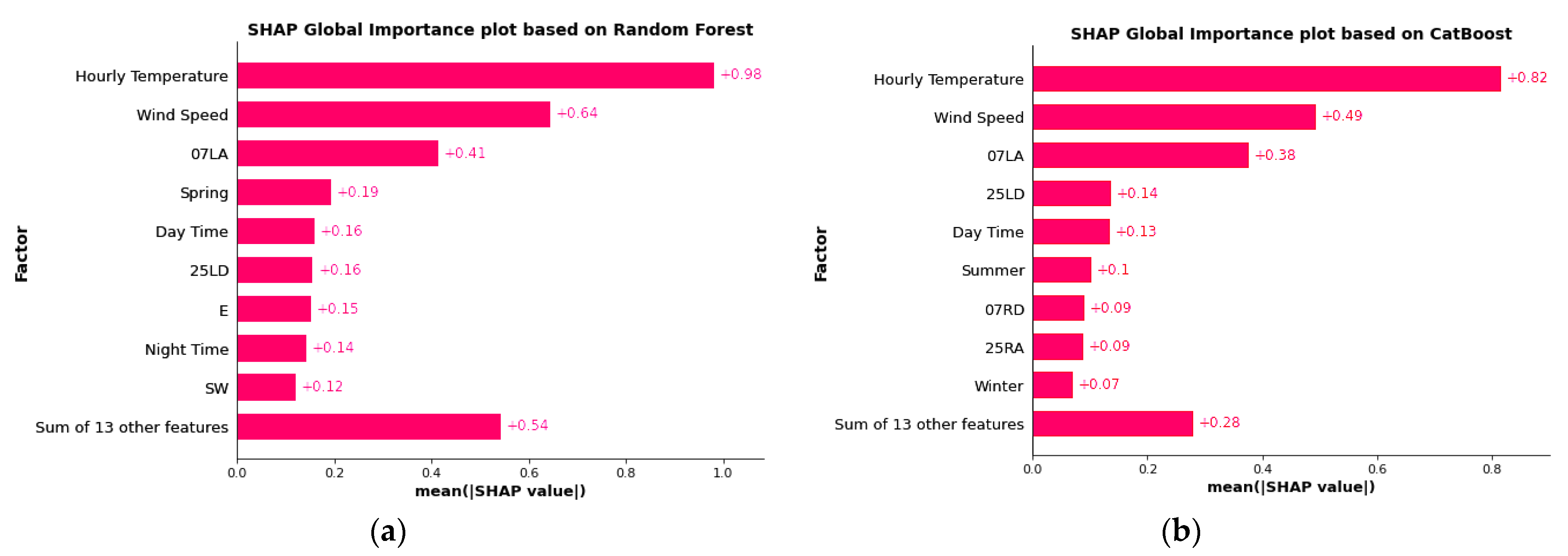
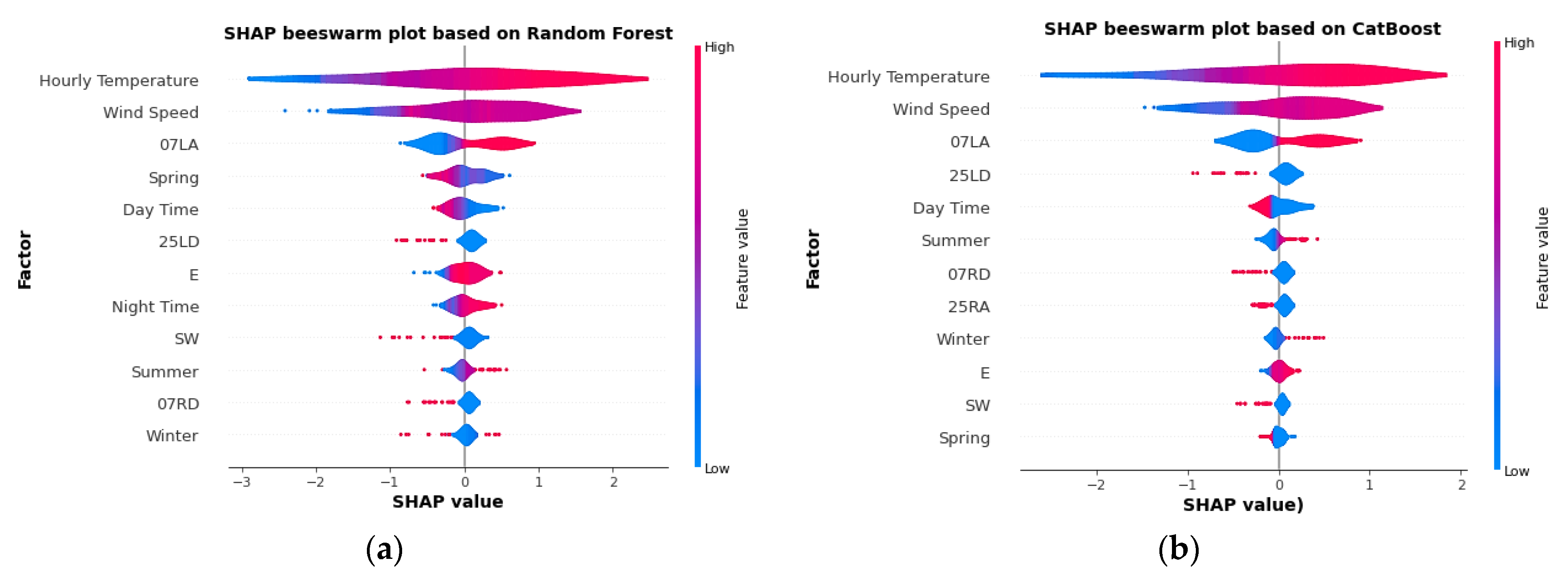
- SHAP demonstrated efficacy in interpreting the optimal model’s outcome (BO-Random Forest classifier). In terms of the factor influence, the SHAP analysis revealed that the hourly temperature is the most influential factor followed by the wind speed and runway 07LA.
- When the wind speed was moderate to high (>4.2 m/s) and the temperature was moderate to high (>24.5 °C), aircrafts on a final approach to Runway 07LA were more likely to experience critical LLWS.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ACI. Annual World Airport Traffic Report; ACI: Montreal, QC, Canada, 2018. [Google Scholar]
- Fichtl, G.H.; Camp, D.W.; Frost, W. Sources of low-level wind shear around airports. J. Aircr. 1977, 14, 5–14. [Google Scholar] [CrossRef]
- Bretschneider, L.; Hankers, R.; Schönhals, S.; Heimann, J.M.; Lampert, A. Wind Shear of Low-Level Jets and Their Influence on Manned and Unmanned Fixed-Wing Aircraft during Landing Approach. Atmosphere 2021, 13, 35. [Google Scholar] [CrossRef]
- Michelson, M.; Shrader, W.; Wieler, J. Terminal Doppler weather radar. Microw. J. 1990, 33, 139. [Google Scholar]
- Shun, C.; Chan, P. Applications of an infrared Doppler LiDAR in detection of wind shear. J. Atmos. Ocean. Technol. 2008, 25, 637–655. [Google Scholar] [CrossRef]
- Li, L.; Shao, A.; Zhang, K.; Ding, N.; Chan, P.-W. Low-level wind shear characteristics and LiDAR-based alerting at Lanzhou Zhongchuan International Airport, China. J. Meteorol. Res. 2020, 34, 633–645. [Google Scholar] [CrossRef]
- Thobois, L.; Cariou, J.P.; Gultepe, I. Review of LiDAR-based applications for aviation weather. Pure Appl. Geophys. 2019, 176, 1959–1976. [Google Scholar] [CrossRef]
- Hon, K.-K. Predicting low-level wind shear using 200-m-resolution NWP at the Hong Kong International Airport. J. Appl. Meteorol. Climatol. 2020, 59, 193–206. [Google Scholar] [CrossRef]
- Chan, P. A tail strike event of an aircraft due to terrain-induced wind shear at the Hong Kong International Airport. Meteorol. Appl. 2014, 21, 504–511. [Google Scholar] [CrossRef]
- Lei, L.; Chan, P.; Li-Jie, Z.; Hui, M. Numerical simulation of terrain-induced vortex/wave shedding at the Ho;ng Kong International Airport. Meteorol. Z. 2013, 22, 317–327. [Google Scholar] [CrossRef]
- Chan, P.; Hon, K. Observation and numerical simulation of terrain-induced wind shear at the Hong Kong International Airport in a planetary boundary layer without temperature inversions. Adv. Meteorol. 2016, 2016, 1454513. [Google Scholar] [CrossRef]
- Shimoyama, K.; Nakanomyo, H.; Obayashi, S. Airport terrain-induced turbulence simulations integrated with weather prediction data. Trans. Jpn. Soc. Aeronaut. Space Sci. 2013, 56, 286–292. [Google Scholar] [CrossRef]
- Casado-Sanz, N.; Guirao, B.; Lara Galera, A.; Attard, M. Investigating the risk factors associated with the severity of the pedestrians injured on Spanish crosstown roads. Sustainability 2019, 11, 5194. [Google Scholar] [CrossRef]
- Shaik, M.E.; Islam, M.M.; Hossain, Q.S. A review on neural network techniques for the prediction of road traffic accident severity. Asian Transp. Stud. 2021, 7, 100040. [Google Scholar] [CrossRef]
- Mujalli, R.O.; de Oña, J. Injury severity models for motor vehicle accidents: A review. In Proceedings of the Institution of Civil Engineers-Transport; Thomas Telford Ltd.: London, UK, 2013; pp. 255–270. [Google Scholar]
- Yuan, C.; Li, Y.; Huang, H.; Wang, S.; Sun, Z.; Li, Y. Using traffic flow characteristics to predict real-time conflict risk: A novel method for trajectory data analysis. Anal. Methods Accid. Res. 2022, 35, 100217. [Google Scholar] [CrossRef]
- Zhao, Y.; Deng, W. Prediction in Traffic Accident Duration Based on Heterogeneous Ensemble Learning. Appl. Artif. Intell. 2022, 1–24. [Google Scholar] [CrossRef]
- Zhang, S.; Khattak, A.; Matara, C.M.; Hussain, A.; Farooq, A. Hybrid feature selection-based machine learning Classification system for the prediction of injury severity in single and multiple-vehicle accidents. PLoS ONE 2022, 17, e0262941. [Google Scholar] [CrossRef]
- Goodman, S.N.; Goel, S.; Cullen, M.R. Machine learning, health disparities, and causal reasoning. Ann. Intern. Med. 2018, 169, 883–884. [Google Scholar] [CrossRef]
- Guo, R.; Fu, D.; Sollazzo, G. An ensemble learning model for asphalt pavement performance prediction based on gradient boosting decision tree. Int. J. Pavement Eng. 2022, 23, 3633–3646. [Google Scholar] [CrossRef]
- Liu, J.N.; Kwong, K.; Chan, P.W. Chaotic oscillatory-based neural network for wind shear and turbulence forecast with LiDAR data. IEEE Trans. Syst. Man Cybern. Part C 2012, 42, 1412–1423. [Google Scholar] [CrossRef]
- Guidotti, R.; Monreale, A.; Ruggieri, S.; Pedreschi, D.; Turini, F.; Giannotti, F. Local rule-based explanations of black box decision systems. arXiv 2018, arXiv:1805.10820. [Google Scholar]
- Rudin, C. Stop explaining black box machine learning models for high stakes decisions and use interpretable models instead. Nat. Mach. Intell. 2019, 1, 206–215. [Google Scholar] [CrossRef] [PubMed]
- Lundberg, S.M.; Lee, S.-I. A unified approach to interpreting model predictions. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Merrick, L.; Taly, A. The explanation game: Explaining machine learning models using Shapley values. In Proceedings of the International Cross-Domain Conference for Machine Learning and Knowledge Extraction, Dublin, Ireland, 25–28 August 2020; pp. 17–38. [Google Scholar]
- Dong, S.; Khattak, A.; Ullah, I.; Zhou, J.; Hussain, A. Predicting and analyzing road traffic injury severity using boosting-based ensemble learning models with SHAPley Additive exPlanations. Int. J. Environ. Res. Public Health 2022, 19, 2925. [Google Scholar] [CrossRef] [PubMed]
- Mangalathu, S.; Hwang, S.H.; Jeon, J.S. Failure mode and effects analysis of RC members based on machine-learning-based SHapley Additive exPlanations (SHAP) approach. Eng. Struct. 2020, 219, 110927. [Google Scholar] [CrossRef]
- Khattak, A.; Almujibah, H.; Elamary, A.; Matara, C.M. Interpretable Dynamic Ensemble Selection Approach for the Prediction of Road Traffic Injury Severity: A Case Study of Pakistan’s National Highway N-5. Sustainability 2022, 14, 12340. [Google Scholar] [CrossRef]
- Feng, D.C.; Wang, W.J.; Mangalathu, S.; Taciroglu, E. Interpretable XGBoost-SHAP machine-learning model for shear strength prediction of squat RC walls. J. Struct. Eng. 2021, 147, 04021173. [Google Scholar] [CrossRef]
- García, M.V.; Aznarte, J.L. Shapley additive explanations for NO2 forecasting. Ecol. Inform. 2020, 56, 101039. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.Y.; Zhang, H.; Ziong, I.-D.; Lei, H.; Deng, S.-H. Hyperparameter optimization for machine learning models based on Bayesian optimization. J. Electron. Sci. Technol. 2019, 17, 26–40. [Google Scholar]
- Shekar, B.; Dagnew, G. Grid search-based hyperparameter tuning and classification of microarray cancer data. In Proceedings of the 2019 2nd International conference on advanced computational and communication paradigms (ICACCP), Sikkim, India, 25–28 February 2019; pp. 1–8. [Google Scholar]
- Kadam, V.J.; Jadhav, S.M. Performance analysis of hyperparameter optimization methods for machine learning with small and medium sized medical datasets. J. Discret. Math. Sci. Cryptogr. 2020, 23, 115–123. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.Y. LightGBM: A highly efficient gradient boosting decision tree. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Parmar, A.; Katariya, R.; Patel, V. A review on random forest: An ensemble classifier. In Proceedings of the International Conference on Intelligent Data Communication Technologies and Internet of Things, Coimbatore, India, 7–8 August 2018; pp. 758–763. [Google Scholar]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Hancock, J.T.; Khoshgoftaar, T.M. CatBoost for big data: An interdisciplinary review. J. BIG Data 2020, 7, 1–45. [Google Scholar] [CrossRef] [PubMed]
- An, T.-K.; Kim, M.-H. A new diverse AdaBoost classifier. In Proceedings of the 2010 International conference on artificial intelligence and computational intelligence, Sanya, China, 23–24 October 2010; pp. 359–363. [Google Scholar]
- Chan, P.W. A significant wind shear event leading to aircraft diversion at the Hong Kong international airport. Meteorol. Appl. 2012, 19, 10–16. [Google Scholar] [CrossRef]
- Chan, P. Severe wind shear at Hong Kong International airport: Climatology and case studies. Meteorol. Appl. 2017, 24, 397–403. [Google Scholar] [CrossRef]
- Chen, F.; Peng, H.; Chan, P.W.; Ma, X.; Zeng, X. Assessing the risk of wind shear occurrence at HKIA using rare-event logistic regression. Meteorol. Appl. 2020, 27, e1962. [Google Scholar] [CrossRef]
- Chan, P.W.; Hon, K.K. Observations and numerical simulations of sea breezes at Hong Kong International Airport. Weather 2022. [CrossRef]
- Chen, F.; Peng, H.; Chan, P.-w.; Zeng, X. Low-level wind effects on the glide paths of the North Runway of HKIA: A wind tunnel study. Build. Environ. 2019, 164, 106337. [Google Scholar] [CrossRef]
- Chen, F.; Peng, H.; Chan, P.-w.; Zeng, X. Wind tunnel testing of the effect of terrain on the wind characteristics of airport glide paths. J. Wind. Eng. Ind. Aerodyn. 2020, 203, 104253. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Codes and Description |
|---|---|
| Runway Orientation | |
| 07LA | 1: If a wind shear event is reported at Runway 07LA, 0: Otherwise |
| 07RA | 1: If a wind shear event is reported at Runway 07RA, 0: Otherwise |
| 25RA | 1: If a wind shear event is reported at Runway 25RA, 0: Otherwise |
| 25LA | 1: If a wind shear event is reported at Runway 25LA, 0: Otherwise |
| 25LD | 1: If a wind shear event is reported at Runway 25LD, 0: Otherwise |
| 07RD | 1: If a wind shear event is reported at Runway 07LD, 0: Otherwise |
| Wind Direction | |
| N | 1: If wind direction is North, 0: Otherwise |
| NE | 1: If wind direction is North-East, 0: Otherwise |
| E | 1: If wind direction is East 0: Otherwise |
| SE | 1: If wind direction is South-East, 0: Otherwise |
| S | 1: If wind direction is South, 0: Otherwise |
| SW | 1: If wind direction is South-West, 0: Otherwise |
| W | 1: If wind direction is West, 0: Otherwise |
| NW | 1: If wind direction is North-West, 0: Otherwise |
| Season of the Year | |
| Winter | 1: If a wind shear event occurs in Winter, 0: Otherwise |
| Spring | 1: If a wind shear event occurs in Spring, 0: Otherwise |
| Summer | 1: If a wind shear event occurs in Summer, 0: Otherwise |
| Autumn | 1: If a wind shear event occurs in Autumn, 0: Otherwise |
| Time of the Day | |
| Day Time | 1:If a wind shear event occurs during day time, 0: Otherwise |
| Night Time | 1:If a wind shear event occurs during night time, 0: Otherwise |
| Algorithm | Hyperparameters | Range | Optimal Values |
|---|---|---|---|
| LGBM | {(n_estimators), (num_leaves), (learning rate), (reg_lambda), (reg_alpha} | {(100–1500), (30–100), (0.001–0.2), (1.1–1.5), (1.1–1.5)} | {900, 38, 0.07, 1.24, 1.18} |
| CatBoost | {(n_estimators), (max_depth), (learning rate)} | {(200–1500), (2–15), (0.001–0.2)} | {727, 5, 0.1} |
| AdaBoost | {(n_estimators), (learning rate)} | {(100–1500), (0.001–0.2)} | {871, 0.08} |
| RF | {(n_estimators), (max_depth)} | {(50–1000), (2–15)} | {1041, 7} |
| XGBoost | {(n_estimators), (num_leaves), (learning rate), (reg_lambda), (reg_alpha} | {(100–1500), (30–100), (0.001–0.2), (1.1–1.5), (1.1–1.5)} | {1105, 46, 0.05, 1.41, 1.27} |
| BO-ELC | Performance Metrics | |||
|---|---|---|---|---|
| Accuracy | Precision | Recall | F1-Score | |
| LGBM | 0.672 | 0.681 | 0.672 | 0.676 |
| AdaBoost | 0.681 | 0.673 | 0.661 | 0.663 |
| Random Forest | 0.714 | 0.724 | 0.710 | 0.713 |
| CatBoost | 0.681 | 0.674 | 0.689 | 0.686 |
| XGBoost | 0.652 | 0.664 | 0.652 | 0.656 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khattak, A.; Chan, P.-W.; Chen, F.; Peng, H. Prediction and Interpretation of Low-Level Wind Shear Criticality Based on Its Altitude above Runway Level: Application of Bayesian Optimization–Ensemble Learning Classifiers and SHapley Additive exPlanations. Atmosphere 2022, 13, 2102. https://doi.org/10.3390/atmos13122102
Khattak A, Chan P-W, Chen F, Peng H. Prediction and Interpretation of Low-Level Wind Shear Criticality Based on Its Altitude above Runway Level: Application of Bayesian Optimization–Ensemble Learning Classifiers and SHapley Additive exPlanations. Atmosphere. 2022; 13(12):2102. https://doi.org/10.3390/atmos13122102
Chicago/Turabian StyleKhattak, Afaq, Pak-Wai Chan, Feng Chen, and Haorong Peng. 2022. "Prediction and Interpretation of Low-Level Wind Shear Criticality Based on Its Altitude above Runway Level: Application of Bayesian Optimization–Ensemble Learning Classifiers and SHapley Additive exPlanations" Atmosphere 13, no. 12: 2102. https://doi.org/10.3390/atmos13122102
APA StyleKhattak, A., Chan, P.-W., Chen, F., & Peng, H. (2022). Prediction and Interpretation of Low-Level Wind Shear Criticality Based on Its Altitude above Runway Level: Application of Bayesian Optimization–Ensemble Learning Classifiers and SHapley Additive exPlanations. Atmosphere, 13(12), 2102. https://doi.org/10.3390/atmos13122102