
Daily River Water Temperature Prediction: A Comparison between Neural Network and Stochastic Techniques



Abstract
:1. Introduction
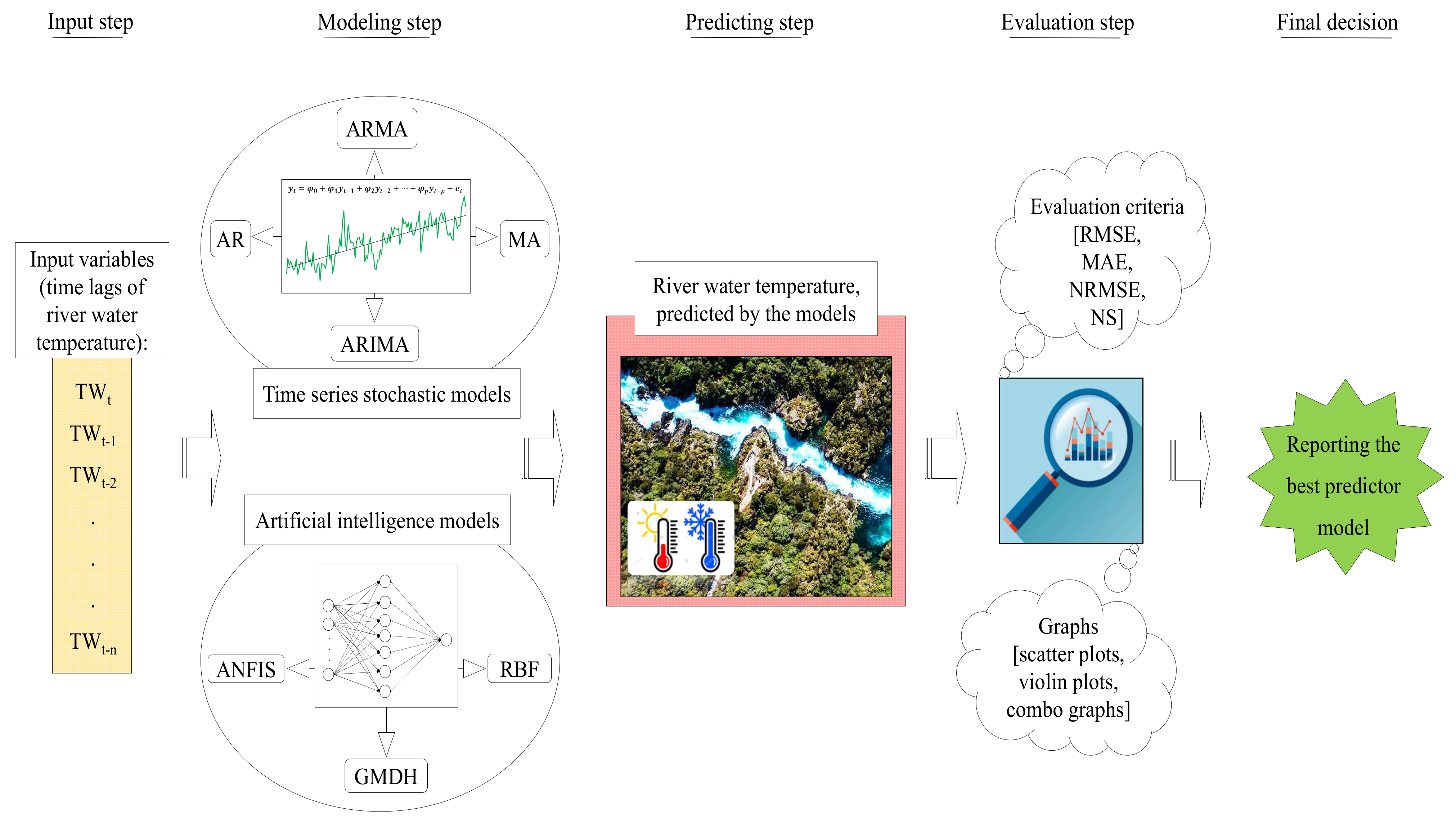
2. Methodology
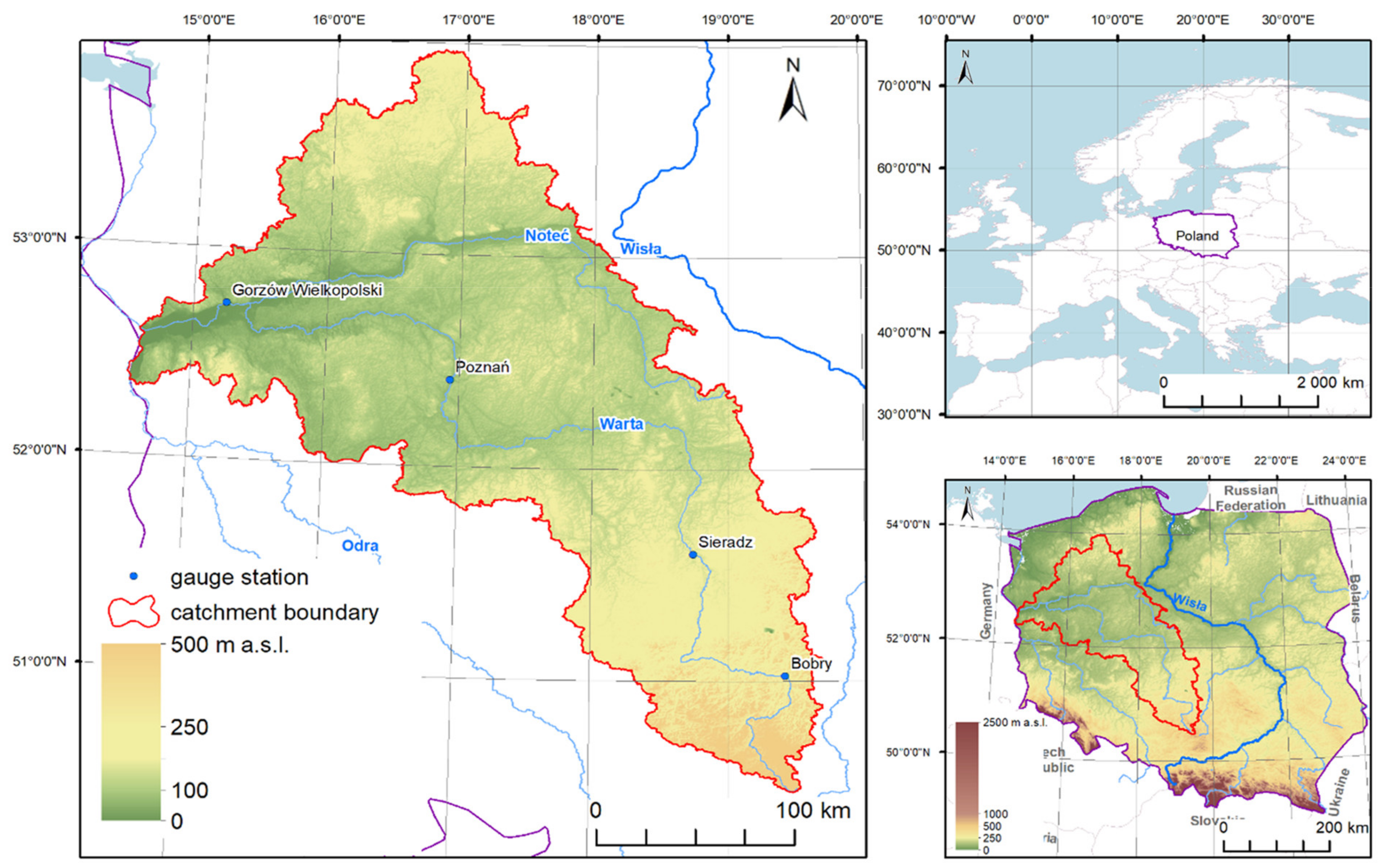
2.1. Study Area and Source Material
2.2. Stochastic Models (Time Series Model)
2.3. Artificial Intelligence Models
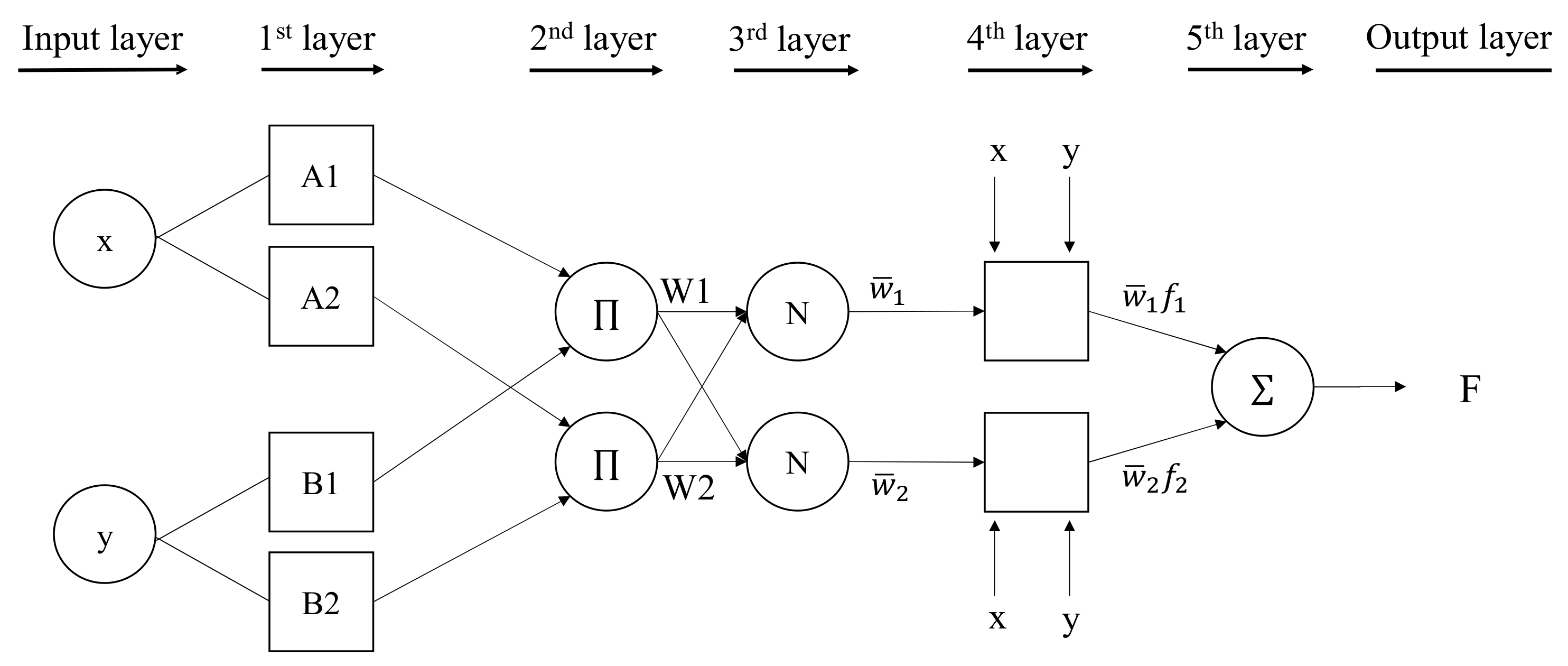
2.3.1. Adaptive Neuro–Fuzzy Inference System (ANFIS)
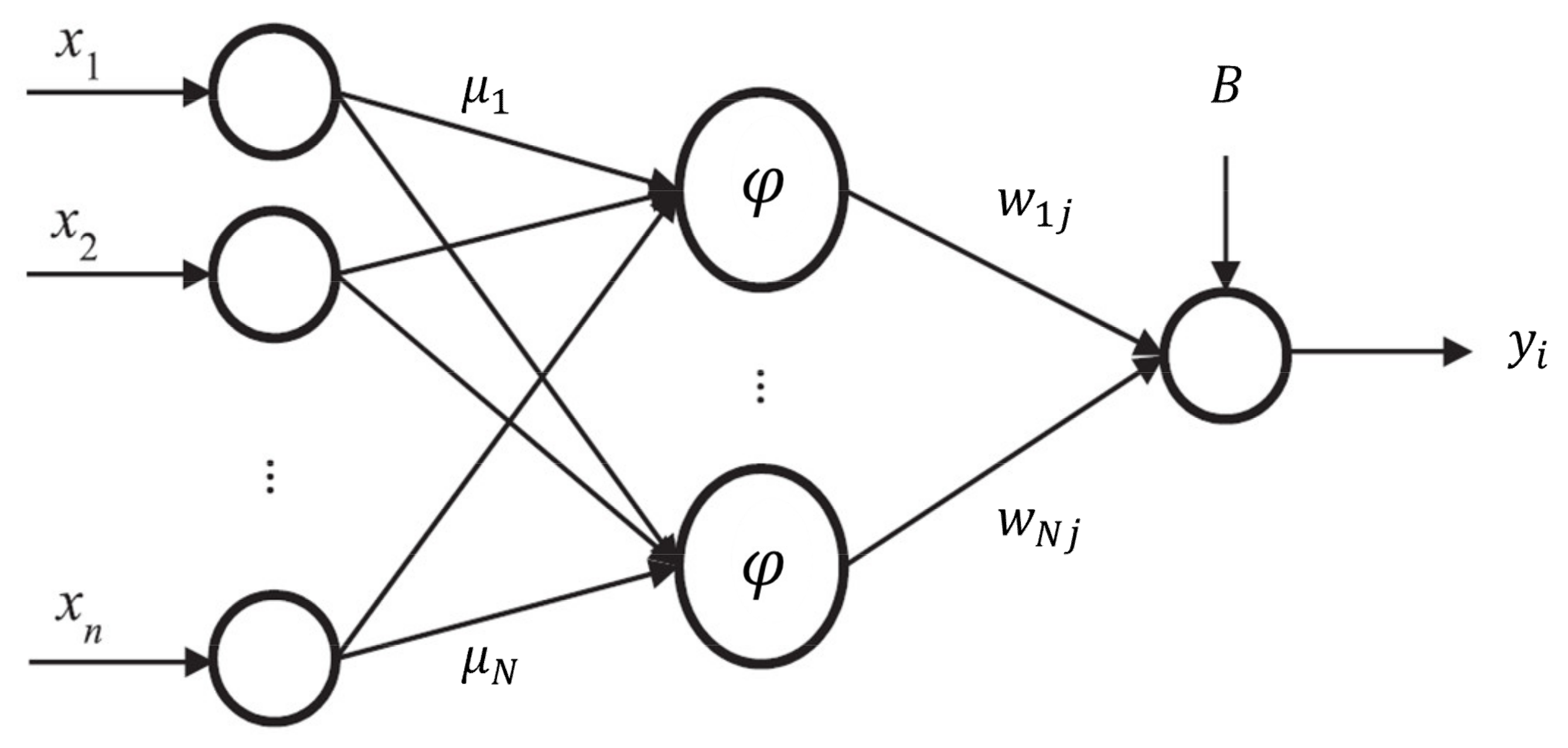
2.3.2. Radial Basis Function (RBFNN) Neural Network
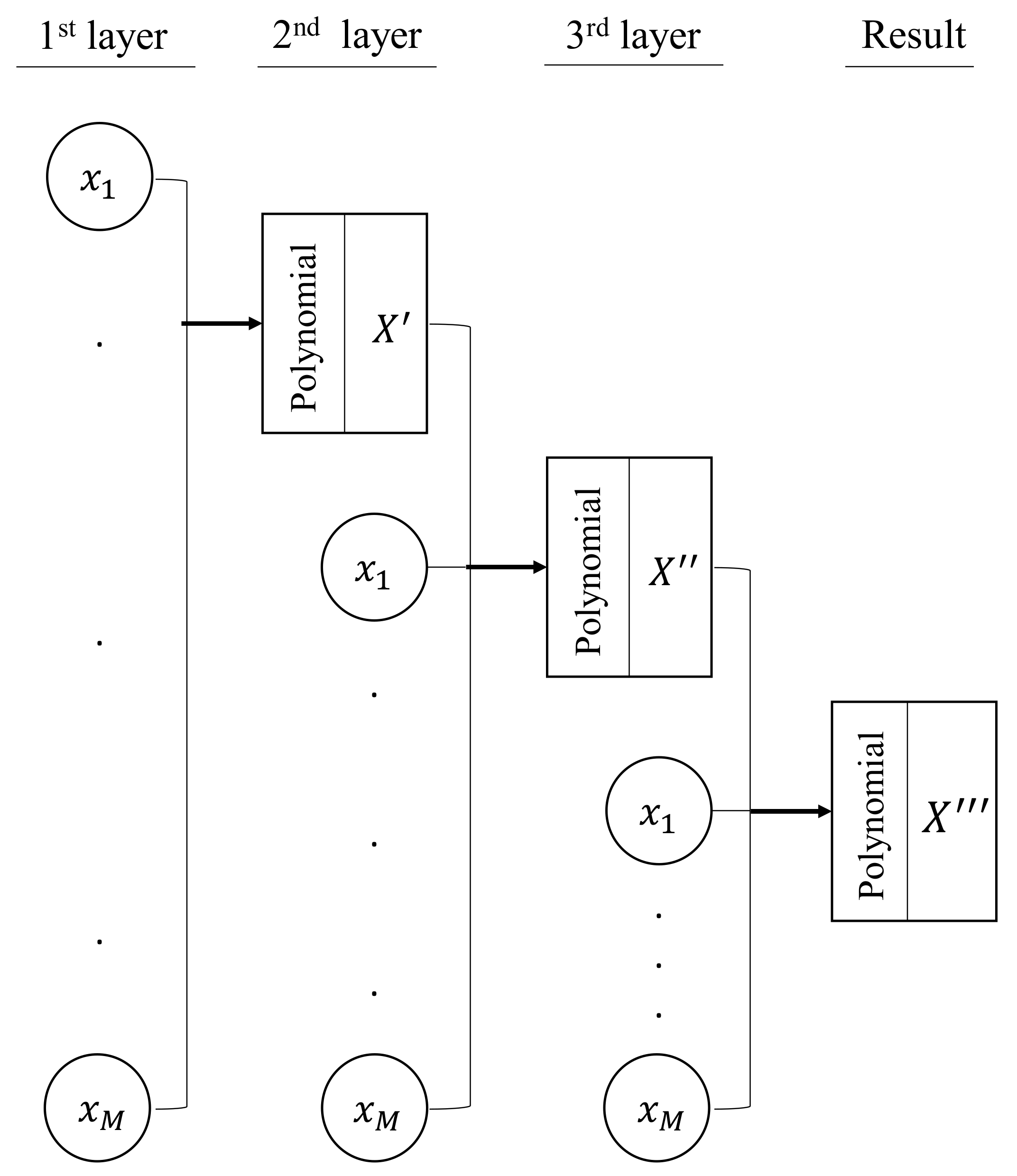
2.3.3. Group Method of Data Handling (GMDH) Neural Network
2.4. Evaluation Criteria
3. Results
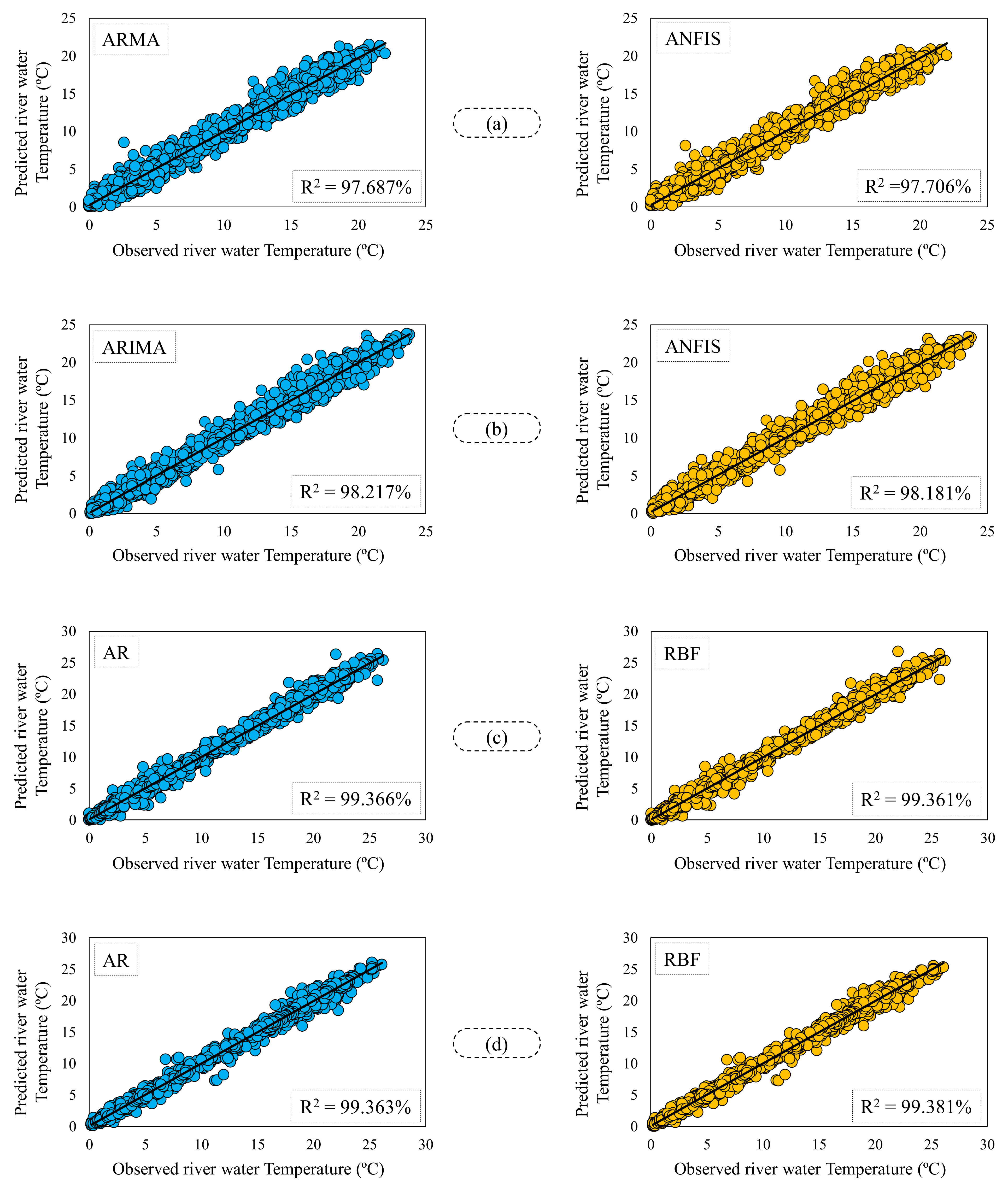
3.1. Modeling and Predicting TRW
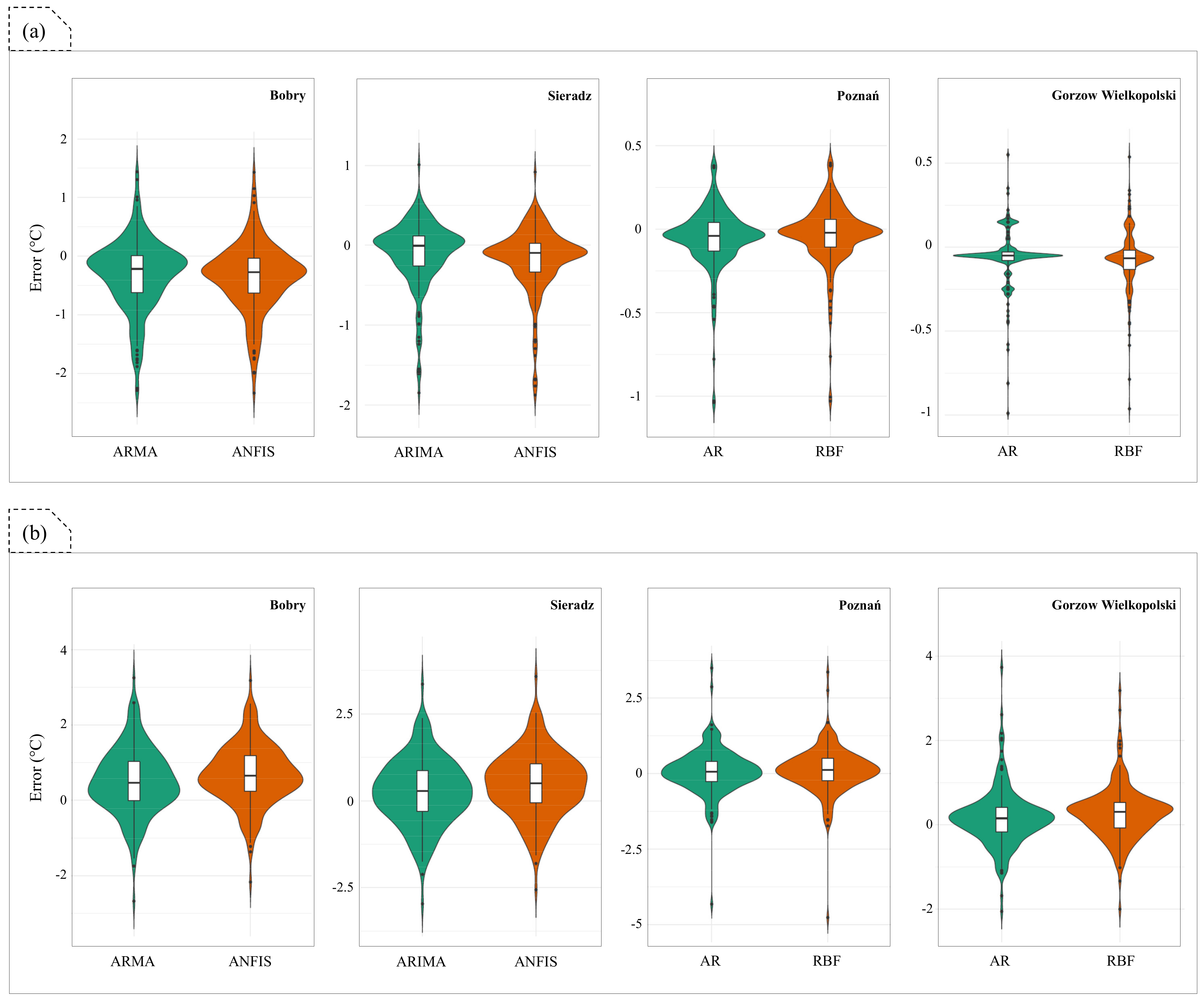
3.2. Investigating the Models in Extreme TRW Deciles
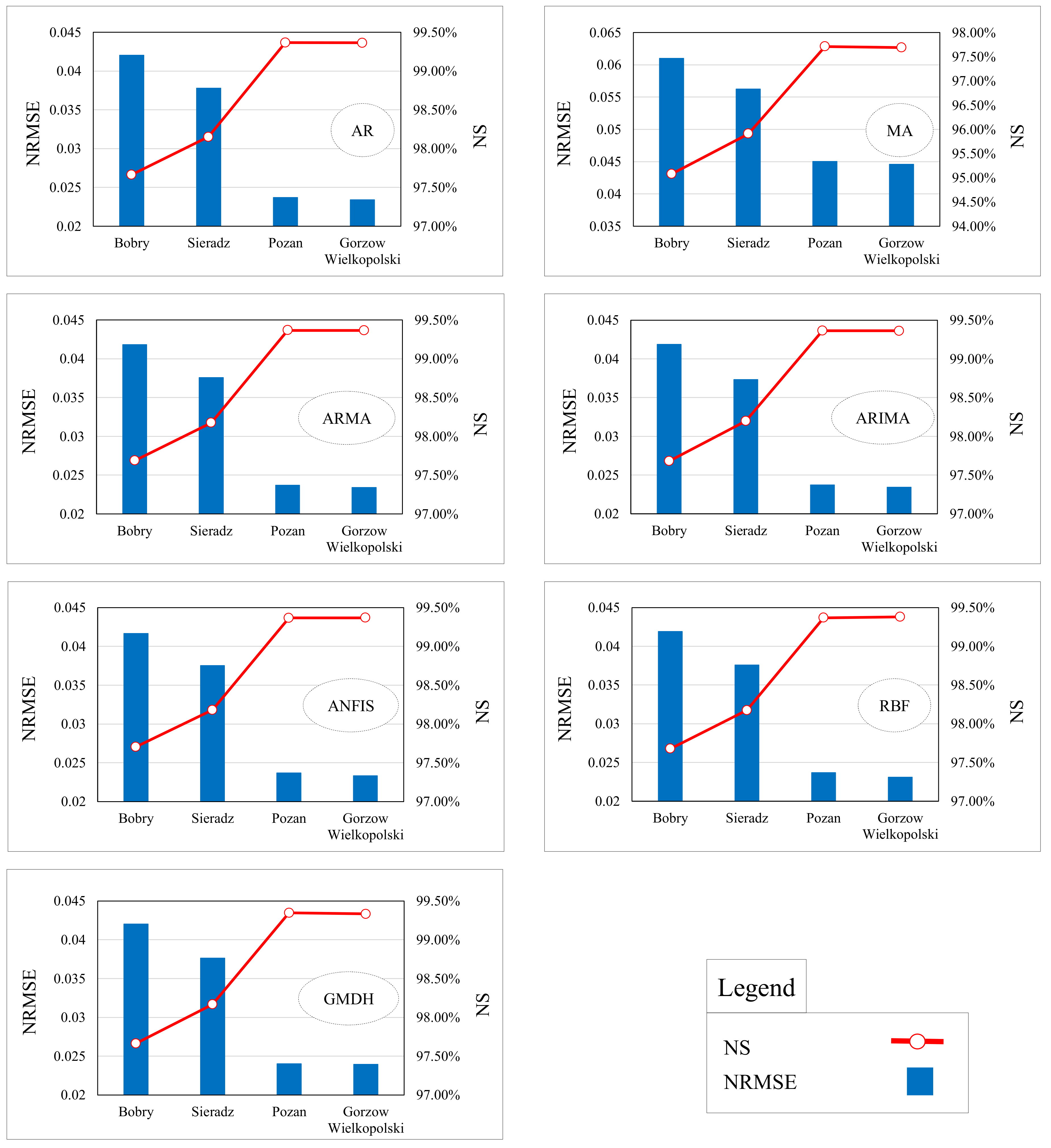
3.3. Comparing Prediction Performance between Stations
4. Discussion
5. Conclusions
- Both AI and stochastic model types had acceptable performance in predicting daily TRW.
- Among the stochastic methods, the AR, ARMA and ARIMA, and among the AI methods, the ANFIS and RBF, offered the best-fitted predictions of TRW. The performance difference between these two types of models is very small, and indeed negligible.
- The stochastic models have less prediction errors in extreme TRW events.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arismendi, I.; Safeeq, M.; Dunham, J.B.; Johnson, S.L. Can air temperature be used to project influences of climate change on stream temperature? Environ. Res. Lett. 2014, 9, 084015. [Google Scholar] [CrossRef]
- Allan, J.D.; Castillo, M.M. Stream Ecology: Structure and Function of Running Waters, 2nd ed.; Chapman and Hall: New York, NY, USA, 2007. [Google Scholar]
- Zhu, S.; Piotrowski, A.P. River/stream water temperature forecasting using artificial intelligence models: A systematic review. Acta Geophys. 2020, 68, 1433–1442. [Google Scholar] [CrossRef]
- Langan, S.J.; Johnston, L.; Donaghy, M.J.; Youngson, A.F.; Hay, D.W.; Soulsby, C. Variation in river water temperatures in an upland stream over a 30-year period. Sci. Total. Environ. 2001, 265, 195–207. [Google Scholar] [CrossRef]
- Liu, B.; Yang, D.; Ye, B.; Berezovskaya, S. Long-term open-water season stream temperature variations and changes over Lena River Basin in Siberia. Glob. Planet. Chang. 2005, 48, 96–111. [Google Scholar] [CrossRef] [Green Version]
- Arora, R.; Tockner, K.; Venohor, M. Changing river temperatures in northern Germany: Trends and drivers of change. Hydrol. Process. 2016, 30, 3084–3096. [Google Scholar] [CrossRef]
- Basarin, B.; Luki’c, T.; Pavi’c, D.; Wilby, R.L. Trends and multi-annual variability of water temperatures in the river Danube, Serbia. Hydrol. Process. 2016, 30, 3315–3329. [Google Scholar] [CrossRef] [Green Version]
- Brosofske, K.D.; Chen, J.; Naiman, R.J.; Franklin, J.F. Harvesting effects on microclimatic gradients from small streams to uplands in western Washington. Ecol. Appl. 1997, 7, 1188–1200. [Google Scholar] [CrossRef]
- Sahoo, G.B.; Schladow, S.G.; Reuter, J.E. Forecasting stream water temperature using regression analysis, artificial neural network, and chaotic non-linear dynamic models. J. Hydrol. 2009, 378, 325–342. [Google Scholar] [CrossRef]
- Letcher, B.H.; Hocking, D.J.; O’Neil, K.; Whiteley, A.R.; Nislow, K.H.; O’Donnell, M.J. A hierarchical model of daily stream temperature using air-water temperature synchronization, autocorrelation, and time lags. PeerJ 2016, 4, e1727. [Google Scholar] [CrossRef] [Green Version]
- Graf, R.A. Multifaceted analysis of the relationship between daily temperature of river water and air. Acta Geophys. 2019, 67, 905–920. [Google Scholar] [CrossRef] [Green Version]
- Graf, R.; Wrzesiński, D. Relationship between Water Temperature of Polish Rivers and Large-Scale Atmospheric Circulation. Water 2019, 11, 1690. [Google Scholar] [CrossRef] [Green Version]
- Pilgrim, J.M.; Fang, X.; Stefan, H.G. Stream temperature correlations with air temperatures in Minnesota: Implications for climate warming. J. Am. Water Resour. Assoc. 1998, 34, 1109–1121. [Google Scholar] [CrossRef]
- Caissie, D.; El-Jabi, N.; Satish, M.G. Modelling of maximum daily water temperatures in a small stream using air temperatures. J. Hydrol. 2001, 251, 14–28. [Google Scholar] [CrossRef]
- Caissie, D.; St-Hilaire, A.; El-Jabi, N. Prediction of Water Temperatures Using Regression and Stochastic Models. In Proceedings of the 57th Canadian Water Resources Association Annual Congress, Montreal, QC, Canada, 16–18 June 2004. [Google Scholar]
- Webb, B.W.; Clack, P.D.; Walling, D.E. Water-air temperature relationships in a Devon river system and the role of flow. Hydrol. Process. 2003, 17, 3069–3084. [Google Scholar] [CrossRef]
- Morrill, J.C.; Bales, R.C.; Conklin, M.H. Estimating stream temperature from air temperature: Implications for future water quality. J. Environ. Eng. 2005, 131, 139–146. [Google Scholar] [CrossRef] [Green Version]
- Hilderbrand, R.H.; Kashiwagi, M.T.; Prochaska, A.P. Regional and local scale modeling of stream temperatures and spatio-temporal variation in thermal sensitivities. Environ. Manag. 2014, 54, 14–22. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Deng, X.; Kim, D.-Y.; Smith, E.P. Modeling maximum daily temperature using a varying coefficient regression model. Water Resour. Res. 2014, 50, 3073–3087. [Google Scholar] [CrossRef]
- Zhu, S.; Heddam, S.; Wu, S.; Dai, J.; Jia, B. Extreme learning machine-based prediction of daily water temperature for rivers. Environ. Earth Sci. 2019, 78, 202. [Google Scholar] [CrossRef]
- Zhu, S.; Nyarko, E.K.; Hadzima-Nyarko, M.; Heddam, S.; Wu, S. Assessing the performance of a suite of machine learning models for daily river water temperature prediction. PeerJ 2019, 7, e7065. [Google Scholar] [CrossRef] [PubMed]
- Graf, R.; Zhu, S.; Sivakumar, B. Forecasting river water temperature time series using a wavelet–neural network hybrid modelling approach. J. Hydrol. 2019, 578, 124115. [Google Scholar] [CrossRef]
- Napiórkowski, M.J.; Piotrowski, A.P.; Napiórkowski, J.J. Stream Temperature Forecasting by Means of Ensemble of Neural Networks: Importance of Input Variables and Ensemble Size; Schleiss, A.J., De Cesare, G., Franca, M.J., Pfister, M., Eds.; River Flow, Taylor & Francis Group: London, UK, 2014. [Google Scholar]
- Piccolroaz, S.; Calamita, E.; Majone, B.; Gallice, A.; Siviglia, A.; Toffolon, M. Prediction of river water temperature: A comparison between a new family of hybrid models and statistical approaches. Hydrol. Process. 2016, 30, 3901–3917. [Google Scholar] [CrossRef]
- Zhu, S.; Heddam, S. Prediction of dissolved oxygen in urban rivers at the Three Gorges Reservoir, China: Extreme learning machines (ELM) versus artificial neural network (ANN). Water Qual. Res. J. 2020, 55, 106–118. [Google Scholar] [CrossRef]
- Zhu, S.; Heddam, S.; Nyarko, E.K.; Hadzima-Nyarko, M.; Piccolroaz, S.; Wu, S. Modeling daily water temperature for rivers: Comparison between adaptive neuro-fuzzy inference systems and artificial neural networks models. Environ. Sci. Pollut. Res. 2019, 26, 402–420. [Google Scholar] [CrossRef]
- Piotrowski, A.P.; Napiórkowski, M.J.; Piotrowska, A.E. Impact of deep learning-based dropout on shallow neural networks applied to stream temperature modelling. Earth-Sci. Rev. 2020, 201, 103076. [Google Scholar] [CrossRef]
- Daigle, A.; St-Hilaire, A.; Ouellet, V.; Corriveau, J.; Taha, B.M.J.; Ouarda, L.B. Diagnostic study and modeling of the annual positive water temperature onset. J. Hydrol. 2009, 370, 29–38. [Google Scholar] [CrossRef]
- Faruk, D.O. A hybrid neural network and ARIMA model for water quality time series prediction. Eng. Appl. Artif. Intell. 2010, 23, 586–594. [Google Scholar] [CrossRef]
- Tao, W.; Kailin, Y.; Yongxin, G. Application of artificial neural networks to forecasting ice conditions of the Yellow River in the Inner Mongolia reach. J. Hydrol. Eng. ASCE 2008, 13, 811–816. [Google Scholar] [CrossRef]
- Piotrowski, A.P.; Napiórkowski, M.J.; Napiórkowski, J.J.; Osuch, M. Comparing various artificial neural network types for water temperature prediction in rivers. J. Hydrol. 2015, 529, 302–315. [Google Scholar] [CrossRef]
- Zhu, S.; Hadzima-Nyarko, M.; Gao, A.; Wang, F.; Wu, J.; Wu, S. Two hybrid data-driven models for modeling water-air temperature relationship in rivers. Environ. Sci. Pollut. Res. 2019, 26, 12622–12630. [Google Scholar] [CrossRef] [PubMed]
- Caissie, D.; El-Jabi, N.; St-Hilaire, A. Stochastic modelling of water temperature in a small stream using air to water relations. Can. J. Civ. Eng. 1998, 25, 250–260. [Google Scholar] [CrossRef]
- Zhu, S.; Nyarko, E.K.; Hadzima-Nyarko, M. Modelling daily water temperature from air temperature for the Missouri River. PeerJ 2018, 6, e4894. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi-Nedushan, B.; St-Hilaire, A.; Ouarda, T.B.M.J.; Bilodeau, L.; Robichaud, É.; Thiémonge, N.; Bobée, B. Predicting river water temperatures using stochastic models: Case study of the Moisie river (Quebec, Canada). Hydrol. Process. 2007, 21, 21–34. [Google Scholar] [CrossRef]
- Hadzima-Nyarko, M.; Rabi, A.; Śperac, M. Implementation of artificial neural networks in modeling the water-air temperature relationship of the river Drava. Water Resour. Manag. 2014, 28, 1379–1394. [Google Scholar] [CrossRef]
- Rabi, A.; Hadzima-Nyarko, M.; Sperac, M. Modelling river temperature from air temperature in the River Drava (Croatia). Hydrol. Sci. J. 2015, 60, 1490–1507. [Google Scholar] [CrossRef]
- Benyahya, L.; St-Hilaire, A.; Ouarda, T.B.M.J.; Bobée, B.; Dumas, J. Comparison of nonparametric and parametric water temperature models on the Nivelle River, France. Hydrol. Sci. J. 2008, 53, 640–655. [Google Scholar] [CrossRef] [Green Version]
- Aghelpour, P.; Mohammadi, B.; Biazar, S.M. Long-term monthly average temperature forecasting in some climate types of Iran, using the models SARIMA, SVR, and SVR-FA. Theor. Appl. Climatol. 2019, 138, 1471–1480. [Google Scholar] [CrossRef]
- Ashrafzadeh, A.; Kişi, O.; Aghelpour, P.; Biazar, S.M.; Masouleh, M.A. Comparative study of time series models, support vector machines, and GMDH in forecasting long-term evapotranspiration rates in northern Iran. J. Irrig. Drain. Eng. 2020, 146, 04020010. [Google Scholar] [CrossRef]
- Aghelpour, P.; Bahrami-Pichaghchi, H.; Varshavian, V. Hydrological drought forecasting using multi-scalar streamflow drought index, stochastic models and machine learning approaches, in northern Iran. Stoch. Environ. Res. Risk Assess. 2021, 35, 1615–1635. [Google Scholar] [CrossRef]
- Aghelpour, P.; Singh, V.P.; Varshavian, V. Time series prediction of seasonal precipitation in Iran, using data-driven models: A comparison under different climatic conditions. Arab. J. Geosci. 2021, 14, 551. [Google Scholar] [CrossRef]
- Box, G.E.P.; Jenkins, G. Time Series Analysis: Forecasting and Control, 2nd ed.; Holden-Day Publishments: San Fransisco, CA, USA, 1976. [Google Scholar]
- Du, H.; Zhao, Z.; Xue, H. ARIMA-M: A New Model for Daily Water Consumption Prediction Based on the Autoregressive Integrated Moving Average Model and the Markov Chain Error Correction. Water 2020, 12, 760. [Google Scholar] [CrossRef] [Green Version]
- Jothiprakash, V.; Kote, A.S. Improving the performance of data-driven techniques through data pre-processing for modelling daily reservoir inflow. Hydrol. Sci. J. 2011, 56, 168–186. [Google Scholar] [CrossRef]
- Modarres, R.; Ouarda, T.B. Modelling heteroscedasticty of streamflow times series. Hydrol. Sci. J. 2013, 58, 54–64. [Google Scholar] [CrossRef]
- Lippi, M.; Bertini, M.; Frasconi, P. Short-term traffic flow forecasting: An experimental comparison of time-series analysis and supervised learning. IEEE Trans. Intell. Transp. Syst. 2013, 14, 871–882. [Google Scholar] [CrossRef]
- Abudu, S.; Cui, C.; King, J.P.; Abudukadeer, K. Comparison of performance of statistical models in forecasting monthly streamflow of Kizil River, China. Water Sci. Eng. 2010, 3, 269–281. [Google Scholar]
- Valipour, M.; Banihabib, M.E.; Behbahani, S.M.R. Comparison of the ARMA, ARIMA, and the autoregressive artificial neural network models in forecasting the monthly inflow of Dez dam reservoir. J. Hydrol. 2013, 476, 433–441. [Google Scholar] [CrossRef]
- Aghelpour, P.; Varshavian, V. Evaluation of stochastic and artificial intelligence models in modeling and predicting of river daily flow time series. Stoch. Environ. Res. Risk Assess. 2020, 34, 33–50. [Google Scholar] [CrossRef]
- Khosravi, K.; Golkarian, A.; Booij, M.J.; Barzegar, R.; Sun, W.; Yaseen, Z.M.; Mosavi, A. Improving daily stochastic streamflow prediction: Comparison of novel hybrid data mining algorithms. Hydrol. Sci. J. 2021, 66, 1457–1474. [Google Scholar] [CrossRef]
- Bari, M.F.; Islam, K.M.S. Stochastic model of flow duration curves for selected rivers in Bangladesh. In Climate Variability and Change–Hydrological Impacts, Proceedings of the Fifth FRIEND World Conference, Havana, Cuba, 27 November–1 December 2006; IAHS Publ.: Wallingford, UK, 2006; Volume 308, pp. 99–104. [Google Scholar]
- Papalaskaris, T.; Kampas, G. Time series analysis of water characteristics of streams in Eastern Macedonia—Thrace, Greece. Eur. Water 2017, 57, 93–100. [Google Scholar]
- Graf, R. Distribution properties of a measurement series of river water temperature at different time resolution levels (based on the example of the Lowland River Notec, Poland). Water 2018, 10, 203. [Google Scholar] [CrossRef] [Green Version]
- Shvartser, L.; Shamir, U.; Feldman, M. Forecasting hourly water demands by pattern recognition approach. J. Water Resour. Plan. Manag. 1993, 119, 611–627. [Google Scholar] [CrossRef]
- Mombeni, H.A.; Rezaei, S.; Nadarajah, S.; Emami, M. Estimation of water demand in Iran based on sarima models. Environ. Model. Assess. 2013, 18, 559–565. [Google Scholar] [CrossRef]
- Woś, A. The Climate of Poland in the Second Half of the 20th Century; Scientific Publishing House UAM: Poznan, Poland, 2010; p. 490. (In Polish) [Google Scholar]
- Salas, J.D.; Delleur, J.W.; Yevjevich, V.; Lane, W.L. Applied Modelling of Hydrologic Time Series; Water Resource Publications: Littleton, CO, USA, 1980; p. 484. [Google Scholar]
- Mohammadi, B.; Linh, N.T.; Pham, Q.B.; Ahmed, A.N.; Vojteková, J.; Guan, Y.; Abba, S.I.; El-Shafie, A. Adaptive neuro-fuzzy inference system coupled with shuffled frog leaping algorithm for predicting river streamflow time series. Hydrol. Sci. J. 2020, 65, 1738–1751. [Google Scholar] [CrossRef]
- Jang, J.S.R.; Sun, C.T.; Mizutani, E. Neuro-fuzzy and soft computing: A computational approach to learning and machine intelligence. IEEE Trans. Autom. Control 1997, 42, 1482–1484. [Google Scholar] [CrossRef]
- Nourani, V.; Alami, M.T.; Vousoughi, F.D. Self-organizing map clustering technique for ANN-based spatiotemporal modeling of groundwater quality parameters. J. Hydroinform. 2016, 18, 288–309. [Google Scholar] [CrossRef]
- Fallah-Mehdipour, E.; Haddad, O.B.; Marino, M.A. Genetic programming in groundwater modeling. J. Hydrol. Eng. 2014, 19, 04014031. [Google Scholar] [CrossRef]
- Kisi, O.; Demir, V.; Kim, S. Estimation of long-term monthly temperatures by three different adaptive neuro-fuzzy approaches using geographical inputs. J. Irrig. Drain. Eng. 2017, 143, 04017052. [Google Scholar] [CrossRef]
- Çaydaş, U.; Hasçalık, A.; Ekici, S. An adaptive neuro-fuzzy inference system (ANFIS) model for wire-EDM. Expert Syst. Appl. 2009, 36, 6135–6139. [Google Scholar] [CrossRef]
- Mamdani, E.H.; Assilian, S. An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Manmach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Aghelpour, P.; Mohammadi, B.; Mehdizadeh, S.; Bahrami-Pichaghchi, H.; Duan, Z. A novel hybrid dragonfly optimization algorithm for agricultural drought prediction. Stoch. Environ. Res. Risk Assess. 2021, 1–19. [Google Scholar] [CrossRef]
- Parsaie, A. Predictive modeling the side weir discharge coefficient using neural network. Model. Earth Syst. Environ. 2016, 2, 63. [Google Scholar] [CrossRef] [Green Version]
- Ehteshami, M.; Farahani, N.D.; Tavassoli, S. Simulation of nitrate contamination in groundwater using artificial neural networks. Model. Earth Syst. Environ. 2016, 2, 28. [Google Scholar] [CrossRef] [Green Version]
- Heddam, S. New modelling strategy based on radial basis function neural network (RBFNN) for predicting dissolved oxygen concentration using the components of the Gregorian calendar as inputs: Case study of Clackamas River, Oregon, USA. Model. Earth Syst. Environ. 2016, 2, 167. [Google Scholar] [CrossRef] [Green Version]
- Alizamir, M.; Kisi, O.; Zounemat-Kermani, M. Modelling long-term groundwater fluctuations by extreme learning machine using hydro-climatic data. Hydrol. Sci. J. 2018, 63, 63–73. [Google Scholar] [CrossRef]
- Ivakhnenko, A.G. Heuristic self-organization in problems of engineering cybernetics. Automatica 1970, 6, 207–219. [Google Scholar] [CrossRef]
- Aghelpour, P.; Kisi, O.; Varshavian, V. Multivariate Drought Forecasting in Short-and Long-Term Horizons Using MSPI and Data-Driven Approaches. J. Hydrol. Eng. 2021, 26, 04021006. [Google Scholar] [CrossRef]
- Najafzadeh, M.; Barani, G.-A. Comparison of group method of data handling based genetic programming and back propagation systems to predict scour depth around bridge piers. Sci. Iran. A 2011, 18, 1207–1213. [Google Scholar] [CrossRef]
- Pereira, I.M.; Bueno, E.I. Variable Identification in Group Method of Data Handling Methodology. In Proceedings of the International Nuclear Atlantic Conference—INAC 2011, Belo Horizonte, MG, Brazil, 24–28 October 2011; Associação Brasileira De Energia Nuclear—Aben: Rio de Janeiro, Brazil, 2011. [Google Scholar]
- Wang, M.; Rezaie-balf, M.; Naganna, S.R.; Yaseen, Z.M. Sourcing CHIRPS precipitation data for streamflow forecasting using Intrinsic Time-scale Decomposition based Machine Learning models. Hydrol. Sci. J. 2021, 66, 1437–1456. [Google Scholar] [CrossRef]
- Nelles, O. Nonlinear System Identification: From Classical Approaches to Neural Networks and Fuzzy Models; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Zahraie, B.; Nasseri, M.; Nematizadeh, F. Exploring spatiotemporal meteorological correlations for basin scale meteorological drought forecasting using data mining methods. Arab. J. Geosci. 2017, 10, 419. [Google Scholar] [CrossRef]
- Moriasi, D.; Arnold, J.; Van Liew, M.; Bingner, R.; Harmel, R.; Veith, T. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Graf, R.; Wrzesiński, D. Detecting Patterns of Changes in River Water Temperature in Poland. Water 2020, 12, 1327. [Google Scholar] [CrossRef]
- Gorączko, M.; Pawłowski, B. Changing of ice phenomena on Warta river in vicinity of Uniejów. Biul. Uniejowski 2014, 3, 23–33. (In Polish) [Google Scholar]
- Graf, R. Variations of the Thermal Conditions of the Warta in the Profile Connecting the Urstromtal and Gorge Sections of the Valley (Nowa Wieś Podgórna—Śrem—Poznań). In Nowoczesne Metody i Rozwiązania w Hydrologii i Gospodarce Wodnej; Absalon, D., Matysik, M., Ruman, M., Eds.; Komisja Hydrologiczna PTG, Oddział: Katowice, Polska, 2015; pp. 177–194. (In Polish) [Google Scholar]
- Graf, R.; Łukaszewicz, J.T.; Jawgiel, K. The analysis of the structure and duration of ice phenomena on the Warta river in relation to thermic conditions in the years 1991–2010. Woda-Środowisko-Obsz. Wiej. 2018, 18, 5–28. (In Polish) [Google Scholar]
- Benyahya, L.; Caissie, D.; St-Hilaire, A.; Ouarda, T.B.M.; Bobée, B. A review of statistical water temperature models. Can. Water Resour. J. 2007, 32, 179–192. [Google Scholar] [CrossRef] [Green Version]
- Dugdale, S.J.; Hannah, D.M.; Malcolm, I.A. River temperature modelling: A review of process-based approaches and future directions. Earth-Sci. Rev. 2017, 175, 97–113. [Google Scholar] [CrossRef]
- Qiu, R.; Wang, Y.; Wang, D.; Qiu, W.; Wu, J.; Tao, Y. Water temperature forecasting based on modified artificial neural network methods: Two cases of the Yangtze River. Sci. Total Environ. 2020, 737, 139729. [Google Scholar] [CrossRef]
- Santos-Fernandez, E.; Ver Hoefc, J.M.; Petersona, E.E.; McGreea, J.; Isaak, D.J.; Mengersena, K. Bayesian spatio-temporal models for stream networks. arXiv 2021, arXiv:2103.03538v1. [Google Scholar]
- Bal, G.; Rivot, E.; Bagliniere, J.-L.; White, J.; Pr´evost, E. A hierarchical Bayesian model to quantify uncertainty of stream water temperature forecasts. PLoS ONE 2014, 9, e115659. [Google Scholar]
- Hague, M.J.; Patterson, D.A. Evaluation of statistical river temperature forecast models for fisheries management. N. Am. J. Fish. Manag. 2014, 34, 132–146. [Google Scholar] [CrossRef]
- Cole, J.C.; Maloney, K.O.; Schmid, M.; McKenna, J.E. Developing and testing temperature models for regulated systems: A case study on the upper Delaware River. J. Hydrol. 2014, 519, 588–598. [Google Scholar] [CrossRef]
- Hong, Y.S.T.; Bhamidimarri, R. Dynamic neuro-fuzzy local modeling system with a nonlinear feature extraction for the online adaptive warning system of river temperature affected by waste cooling water discharge. Stoch. Environ. Res. Risk Assess. 2012, 26, 947–960. [Google Scholar] [CrossRef]
- Kurnaz, S.; Cetin, O.; Kaynak, O. Adaptive neuro-fuzzy inference system based autonomous flight control of unmanned air vehicles. Expert Syst. Appl. 2010, 37, 1229–1234. [Google Scholar] [CrossRef]
- Mohandes, M.; Rehman, S.; Rahman, S.M. Estimation of wind speed profile using adaptive neuro-fuzzy inference system (ANFIS). Appl. Energy 2011, 8, 4024–4032. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gauge Station | Coordinates | Phase * | Mean (°C) | St. Dev. ** (°C) | C.V. (%) | Min. (°C) | Max. (°C) | Skew. (−) | Kurt. (−) | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Latitude (°Northern) | Longitude (°Eeastern) | Elevation (m) | |||||||||
| Bobry | 51.02 | 19.40 | 205.0 | Training | 9.7 | 6.1 | 62.3 | 0.00 | 27.0 | 0.07 | −1.30 |
| Testing | 9.9 | 6.0 | 61.1 | 0.00 | 22.0 | 0.05 | −1.30 | ||||
| Sieradz | 51.60 | 18.73 | 130.5 | Training | 9.9 | 6.7 | 68.2 | 0.10 | 24.8 | 0.10 | −1.33 |
| Testing | 10.3 | 6.6 | 63.7 | 0.10 | 23.8 | 0.09 | −1.26 | ||||
| Poznań | 52.38 | 16.93 | 54.5 | Training | 10.7 | 7.5 | 69.7 | 0.00 | 26.2 | 0.11 | −1.44 |
| Testing | 11.1 | 7.8 | 70.1 | 0.00 | 26.2 | 0.08 | −1.41 | ||||
| Gorzow Wielkopolski | 52.72 | 15.23 | 25.0 | Training | 10.7 | 7.5 | 70.1 | 0.10 | 26.1 | 0.10 | −1.41 |
| Testing | 11.1 | 7.6 | 68.2 | 0.20 | 26.1 | 0.06 | −1.41 | ||||
| Station | Model | Training | Testing | ||
|---|---|---|---|---|---|
| RMSE (°C) | MAE (°C) | RMSE (°C) | MAE (°C) | ||
| Bobry | AR (4) | 1.027 | 0.769 | 0.924 | 0.692 |
| MA (5) | 1.462 | 1.160 | 1.342 | 1.084 | |
| ARMA (3,1) * | 1.021 | 0.765 | 0.920 | 0.690 | |
| ARIMA (2,1,1) | 1.022 | 0.764 | 0.921 | 0.691 | |
| ANFIS-ACF | 1.014 | 0.763 | 0.916 | 0.694 | |
| ANFIS-PACF | 1.024 | 0.773 | 0.924 | 0.697 | |
| RBF-ACF | 1.010 | 0.763 | 0.922 | 0.698 | |
| RBF-PACF | 1.024 | 0.773 | 0.924 | 0.697 | |
| GMDH-ACF | 1.023 | 0.768 | 0.925 | 0.694 | |
| GMDH-PACF | 1.033 | 0.773 | 0.931 | 0.694 | |
| Sieradz | AR (3) | 0.869 | 0.619 | 0.896 | 0.669 |
| MA (5) | 1.323 | 1.075 | 1.333 | 1.071 | |
| ARMA (3,1) | 0.864 | 0.620 | 0.890 | 0.666 | |
| ARIMA (4,1,4) | 0.861 | 0.614 | 0.885 | 0.662 | |
| ANFIS-ACF | 0.861 | 0.614 | 0.889 | 0.665 | |
| ANFIS-PACF | 0.880 | 0.632 | 0.908 | 0.690 | |
| RBF-ACF | 0.858 | 0.614 | 0.891 | 0.667 | |
| RBF-PACF | 0.880 | 0.632 | 0.908 | 0.690 | |
| GMDH-ACF | 0.865 | 0.614 | 0.892 | 0.664 | |
| GMDH-PACF | 0.885 | 0.633 | 0.913 | 0.688 | |
| Poznań | AR (3) | 0.446 | 0.306 | 0.621 | 0.416 |
| MA (5) | 0.966 | 0.809 | 1.180 | 0.943 | |
| ARMA (2,1) | 0.446 | 0.306 | 0.621 | 0.416 | |
| ARIMA (1,1,1) | 0.447 | 0.305 | 0.622 | 0.415 | |
| ANFIS-ACF | 0.442 | 0.305 | 0.621 | 0.418 | |
| ANFIS-PACF | 0.447 | 0.308 | 0.623 | 0.418 | |
| RBF-ACF | 0.444 | 0.305 | 0.620 | 0.414 | |
| RBF-PACF | 0.440 | 0.304 | 0.625 | 0.423 | |
| GMDH-ACF | 0.445 | 0.306 | 0.630 | 0.417 | |
| GMDH-PACF | 0.483 | 0.324 | 0.636 | 0.435 | |
| Gorzow Wielkopolski | AR (2) | 0.636 | 0.426 | 0.606 | 0.396 |
| MA (5) | 1.182 | 0.944 | 1.155 | 0.942 | |
| ARMA (1,3) | 0.634 | 0.425 | 0.606 | 0.396 | |
| ARIMA (2,1,0) | 0.635 | 0.423 | 0.607 | 0.393 | |
| ANFIS-ACF | 0.631 | 0.426 | 0.606 | 0.397 | |
| ANFIS-PACF | 0.632 | 0.428 | 0.604 | 0.399 | |
| RBF-ACF | 0.627 | 0.426 | 0.607 | 0.397 | |
| RBF-PACF | 0.616 | 0.424 | 0.598 | 0.396 | |
| GMDH-ACF | 0.626 | 0.424 | 0.648 | 0.398 | |
| GMDH-PACF | 0.643 | 0.433 | 0.620 | 0.404 | |
| Decile | Variables | Observed TRW | AR | MA | ARMA | ARIMA | ANFIS | RBF | GMDH |
|---|---|---|---|---|---|---|---|---|---|
| Lower decile | Observed TRW | 1 | 0.780 ** | 0.607 ** | 0.779 ** | 0.780 ** | 0.773 ** | 0.760 ** | 0.783 ** |
| AR | 1 | 0.759 ** | 0.992 ** | 0.977 ** | 0.989 ** | 0.976 ** | 0.987 ** | ||
| MA | 1 | 0.764 ** | 0.743 ** | 0.781 ** | 0.794 ** | 0.735 ** | |||
| ARMA | 1 | 0.986 ** | 0.986 ** | 0.977 ** | 0.976 ** | ||||
| ARIMA | 1 | 0.969 ** | 0.951 ** | 0.965 ** | |||||
| ANFIS | 1 | 0.988 ** | 0.979 ** | ||||||
| RBF | 1 | 0.954 ** | |||||||
| GMDH | 1 | ||||||||
| Upper decile | Observed TRW | 1 | 0.833 ** | 0.759 ** | 0.836 ** | 0.835 ** | 0.835 ** | 0.837 ** | 0.834 ** |
| AR | 1 | 0.890 ** | 0.999 ** | 0.999 ** | 0.997 ** | 0.992 ** | 0.997 ** | ||
| MA | 1 | 0.890 ** | 0.889 ** | 0.890 ** | 0.902 ** | 0.878 ** | |||
| ARMA | 1 | 0.999 ** | 0.998 ** | 0.994 ** | 0.997 ** | ||||
| ARIMA | 1 | 0.996 ** | 0.991 ** | 0.996 ** | |||||
| ANFIS | 1 | 0.997 ** | 0.997 ** | ||||||
| RBF | 1 | 0.993 ** | |||||||
| GMDH | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graf, R.; Aghelpour, P. Daily River Water Temperature Prediction: A Comparison between Neural Network and Stochastic Techniques. Atmosphere 2021, 12, 1154. https://doi.org/10.3390/atmos12091154
Graf R, Aghelpour P. Daily River Water Temperature Prediction: A Comparison between Neural Network and Stochastic Techniques. Atmosphere. 2021; 12(9):1154. https://doi.org/10.3390/atmos12091154
Chicago/Turabian StyleGraf, Renata, and Pouya Aghelpour. 2021. "Daily River Water Temperature Prediction: A Comparison between Neural Network and Stochastic Techniques" Atmosphere 12, no. 9: 1154. https://doi.org/10.3390/atmos12091154
APA StyleGraf, R., & Aghelpour, P. (2021). Daily River Water Temperature Prediction: A Comparison between Neural Network and Stochastic Techniques. Atmosphere, 12(9), 1154. https://doi.org/10.3390/atmos12091154