Understanding and Predicting Nonlinear Turbulent Dynamical Systems with Information Theory



Abstract
1. Introduction
2. An Information-Theoretic Framework
2.1. Information Distance of Equilibria
2.2. Information Distance on Dynamical Features
2.3. The Overall Information Distance
3. Linear Response Theory and Fluctuation Dissipation Theorem
3.1. The General Framework of the FDT
3.2. Quasi-Gaussian FDT
4. An Efficient and Accurate Algorithm for Calculating Linear Response
4.1. The Efficient Statistically-Accurate Algorithm for Solving the Non-Gaussian PDF in Large Dimensions
4.2. Gaussian Mixture FDT
5. Applications of the Simple Information Criterion: Model Reduction, Stochastic Parameterizations, and Intermittent Events
5.1. Model Reduction
5.2. Stochastic Parameterizations
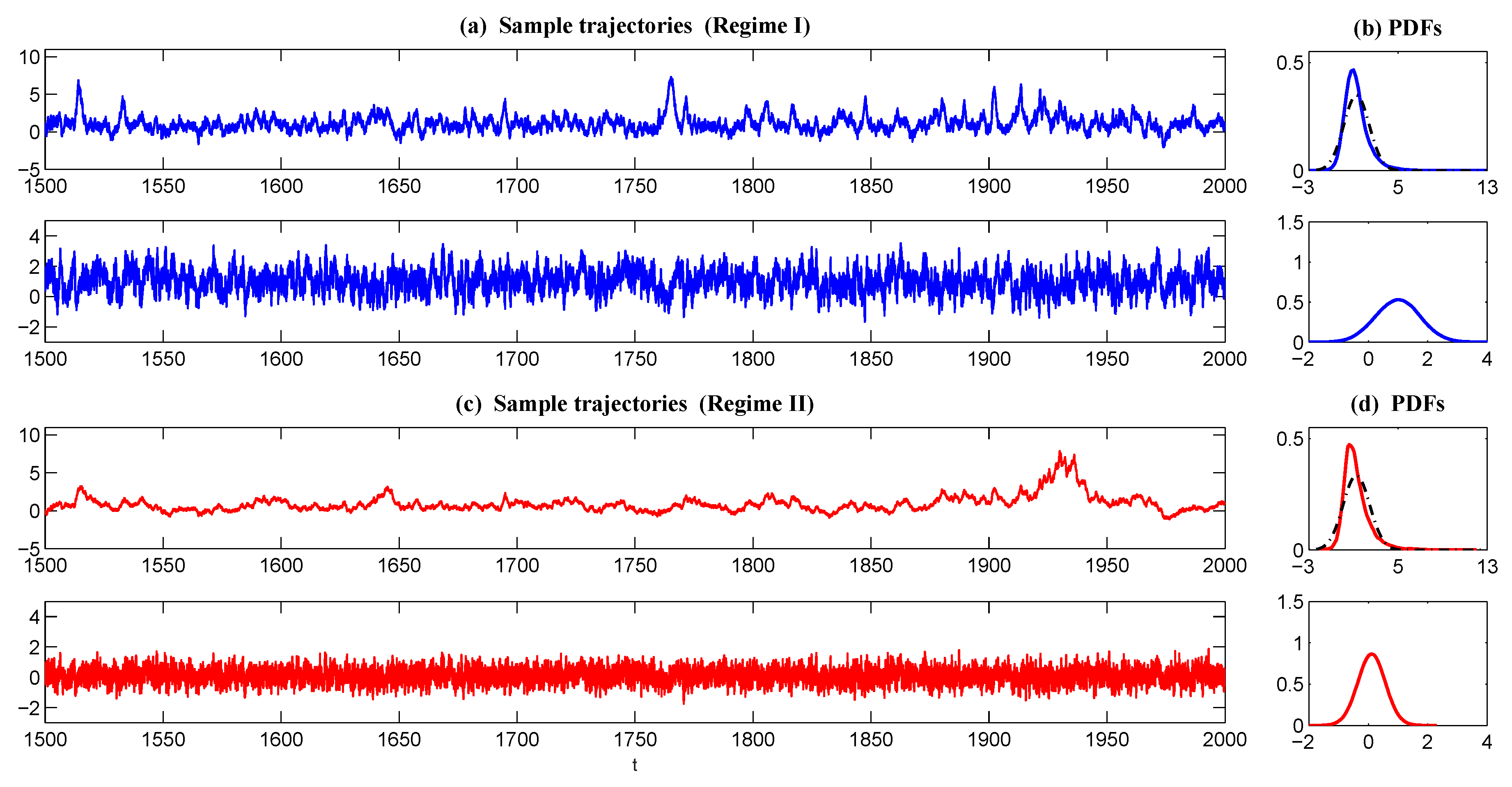
5.3. Intermittency with the Same Statistics, but Different Dynamical Behavior
6. Applying the GM FDT for Calculating the Linear Response in Strongly-Non-Gaussian Models
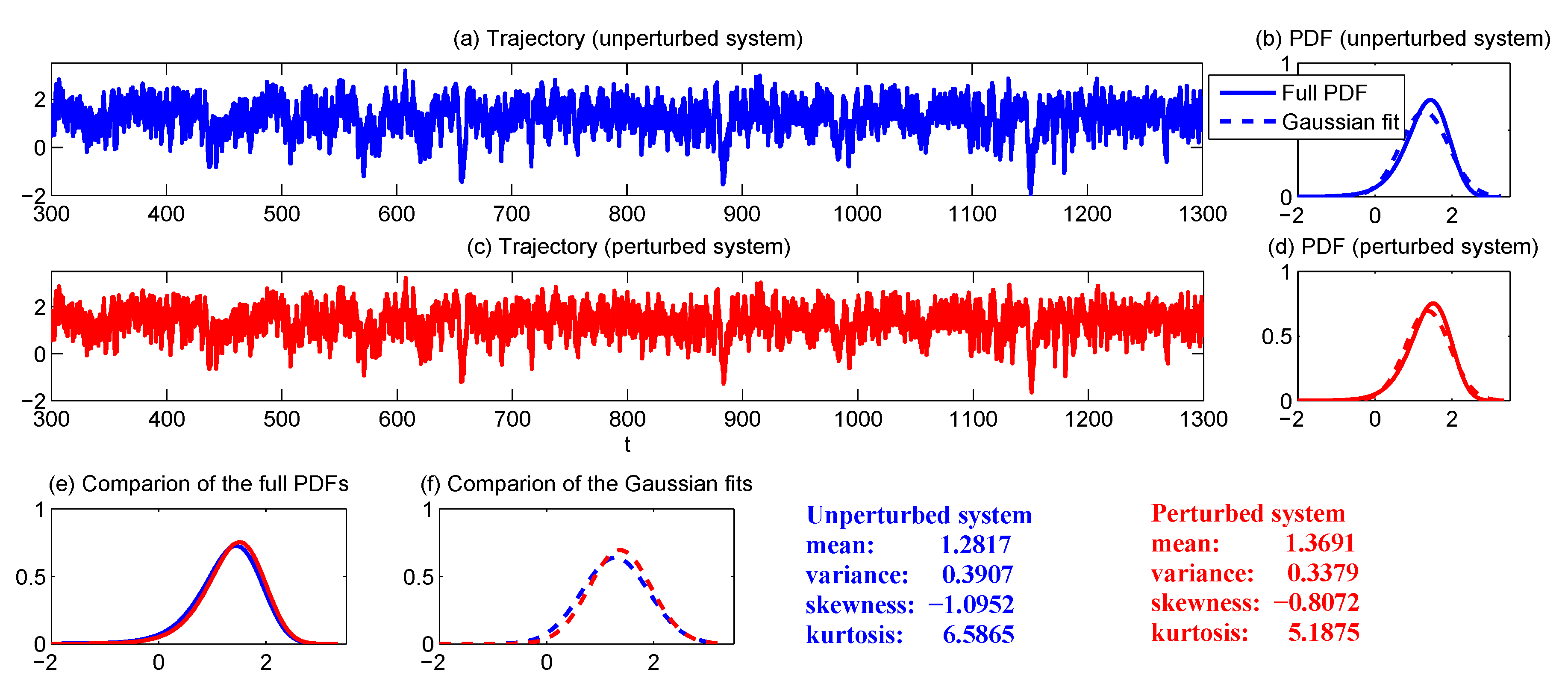
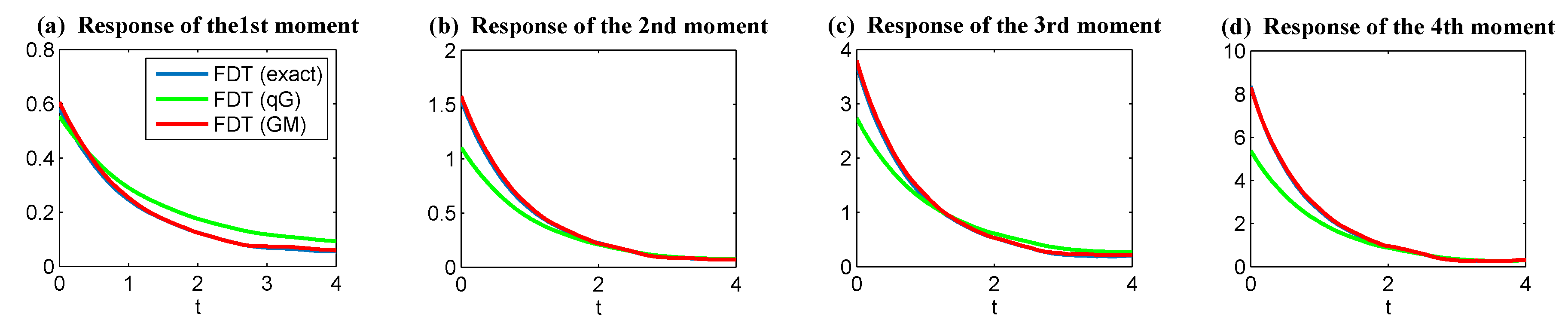
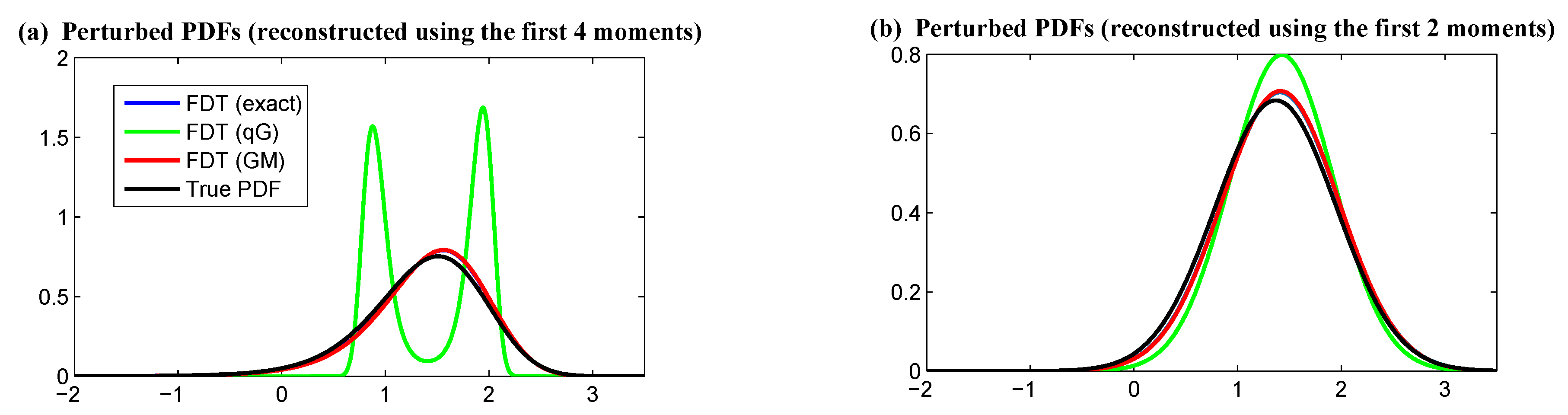
6.1. A Scalar Nonlinear Model
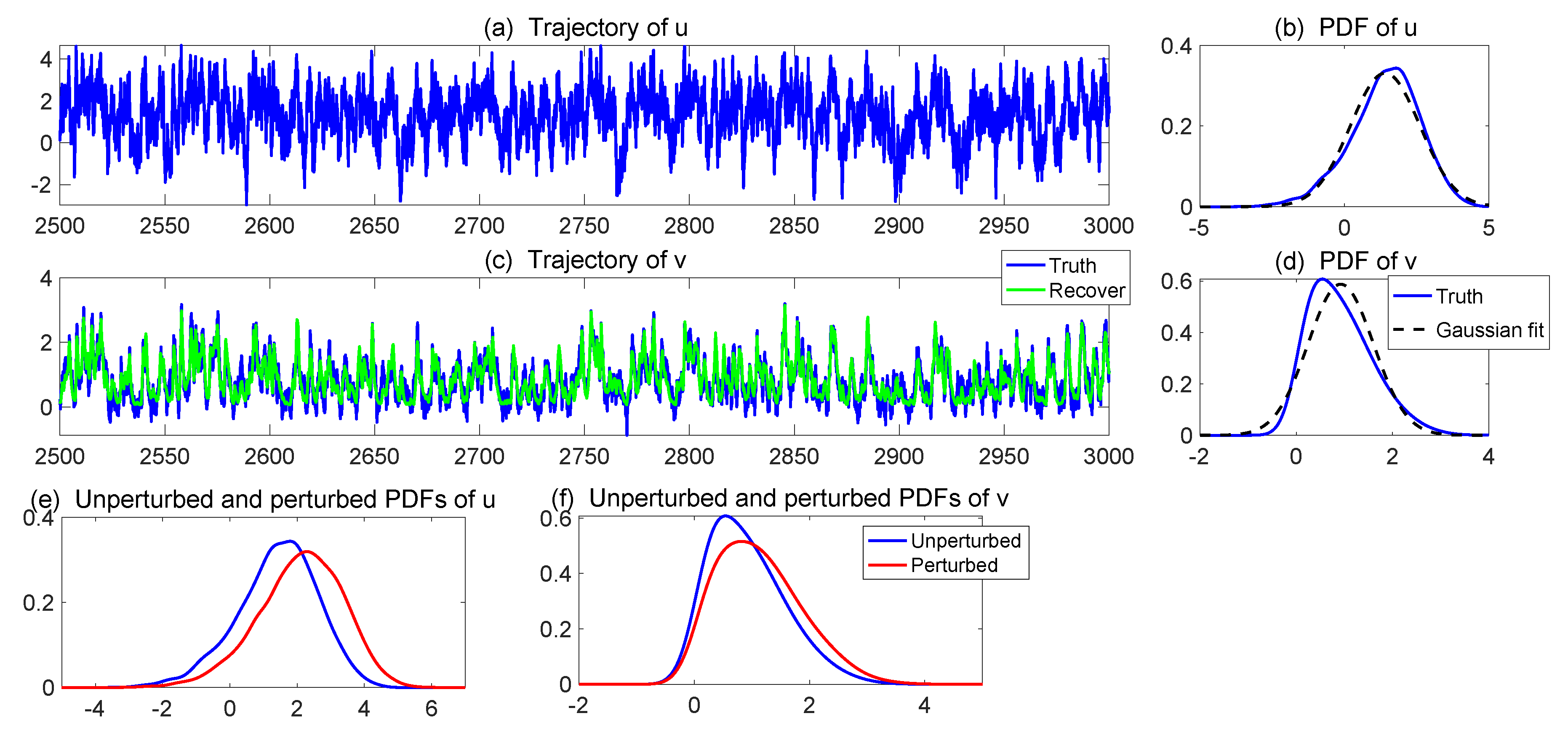
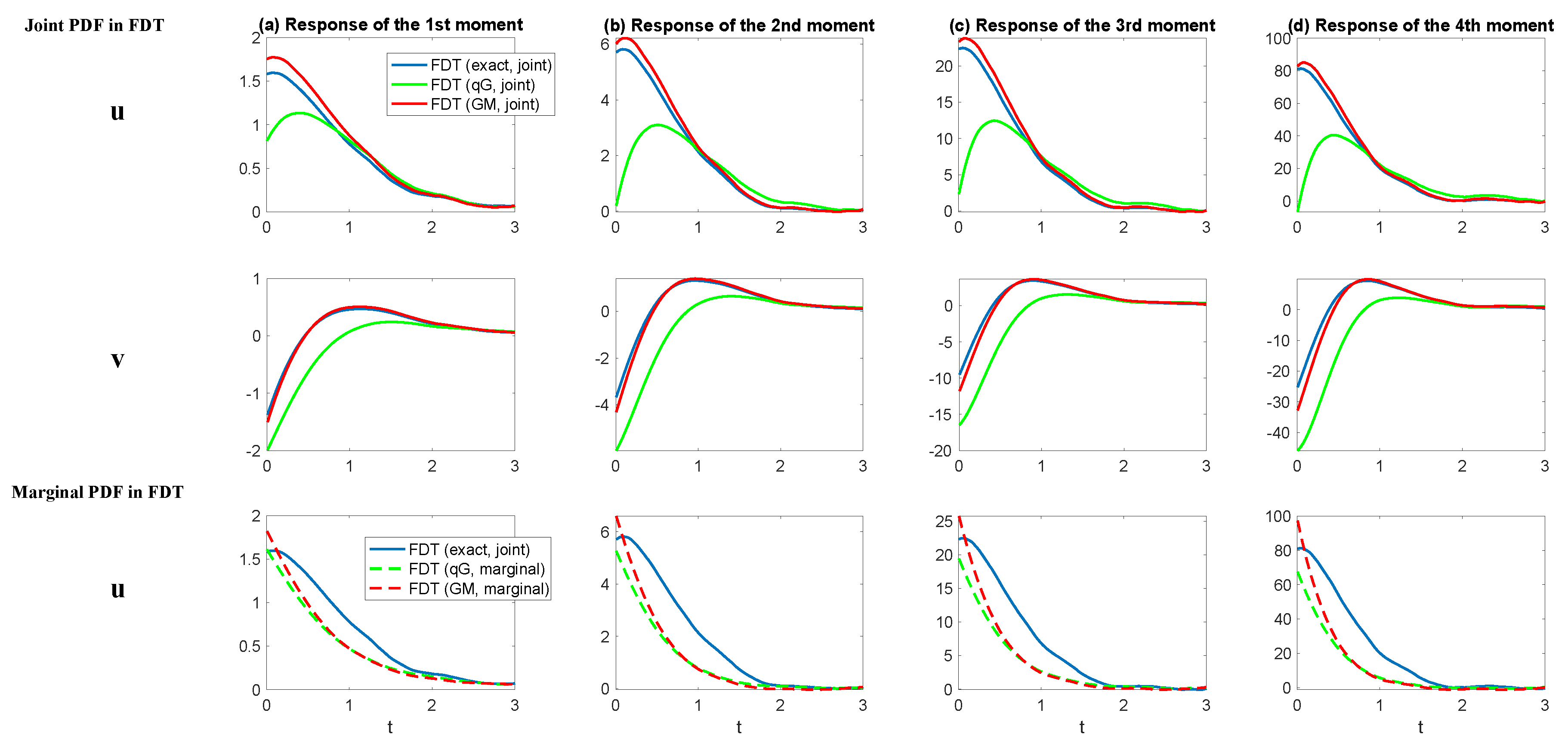
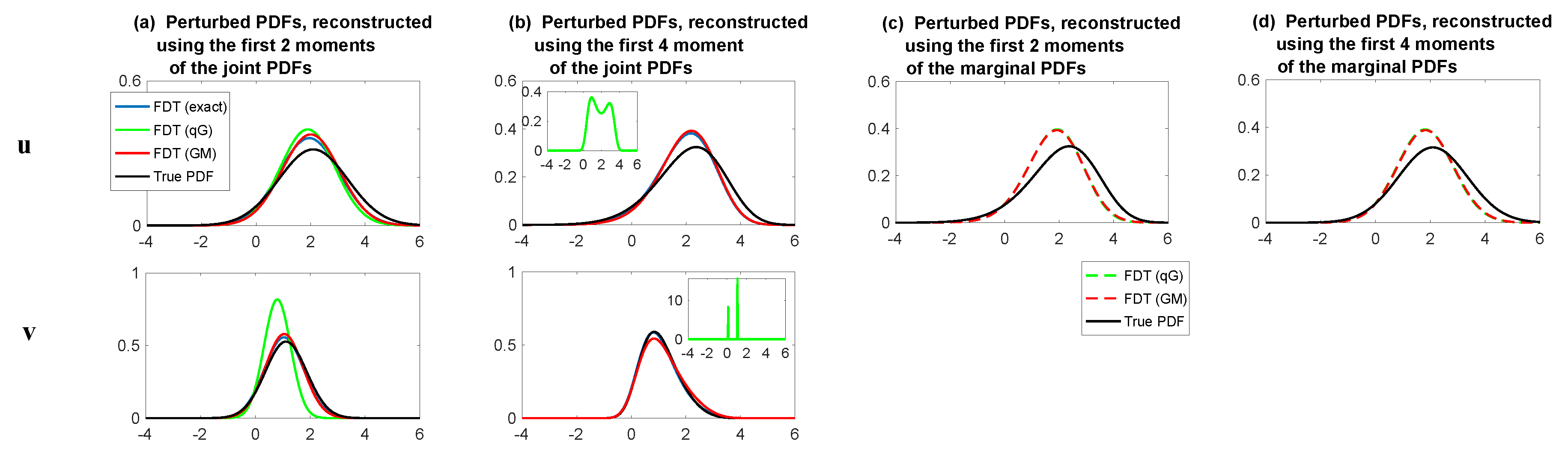
6.2. A Dyad Model with Energy-Conserving Nonlinearity
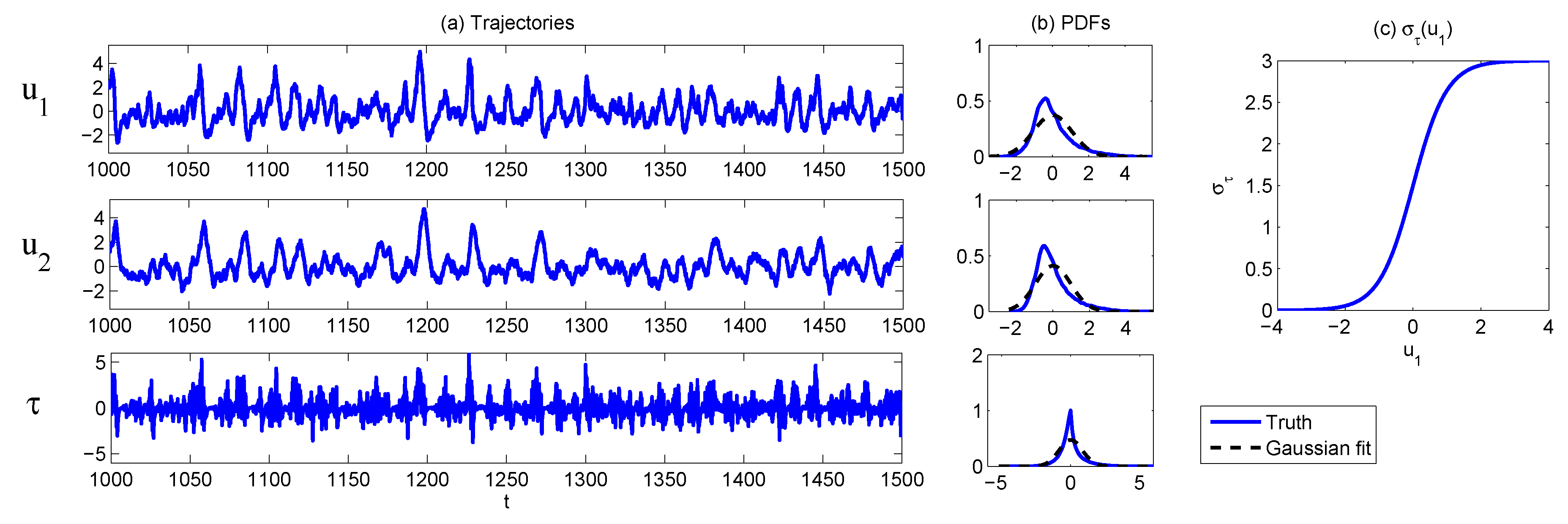
6.3. A Slow-Fast Triad Model with Potential Application to the Study of the El Niño-Southern Oscillation
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A. Conditional Gaussian Nonlinear Systems
Appendix B. The Maximum Entropy Principle
Appendix C. A Two-Dimensional Example of the GM FDT
References
- Majda, A.J. Introduction to Turbulent Dynamical Systems in Complex Systems; Springer: New York, NY, USA, 2016. [Google Scholar]
- Majda, A.; Wang, X. Nonlinear Dynamics and Statistical Theories for Basic Geophysical Flows; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Baleanu, D.; Machado, J.A.T.; Luo, A.C. Fractional Dynamics and Control; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Deisboeck, T.; Kresh, J.Y. Complex Systems Science in Biomedicine; Springer Science & Business Media: New York, NY, USA, 2007. [Google Scholar]
- Stelling, J.; Kremling, A.; Ginkel, M.; Bettenbrock, K.; Gilles, E. Foundations of Systems Biology; MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Sheard, S.A.; Mostashari, A. Principles of complex systems for systems engineering. Syst. Eng. 2009, 12, 295–311. [Google Scholar] [CrossRef]
- Wilcox, D.C. Multiscale model for turbulent flows. AIAA J. 1988, 26, 1311–1320. [Google Scholar] [CrossRef]
- Majda, A.J.; Gershgorin, B. Quantifying uncertainty in climate change science through empirical information theory. Proc. Natl. Acad. Sci. USA 2010, 107, 14958–14963. [Google Scholar] [CrossRef]
- Majda, A.J.; Gershgorin, B. Improving model fidelity and sensitivity for complex systems through empirical information theory. Proc. Natl. Acad. Sci. USA 2011, 108, 10044–10049. [Google Scholar] [CrossRef]
- Majda, A.J.; Gershgorin, B. Link between statistical equilibrium fidelity and forecasting skill for complex systems with model error. Proc. Natl. Acad. Sci. USA 2011, 108, 12599–12604. [Google Scholar] [CrossRef]
- Gershgorin, B.; Majda, A.J. Quantifying uncertainty for climate change and long-range forecasting scenarios with model errors. part I: Gaussian models. J. Clim. 2012, 25, 4523–4548. [Google Scholar] [CrossRef]
- Majda, A.J.; Branicki, M. Lessons in uncertainty quantification for turbulent dynamical systems. Discret. Contin. Dyn. Syst.-A 2012, 32, 3133–3221. [Google Scholar]
- Branicki, M.; Majda, A.J. Quantifying uncertainty for predictions with model error in non-Gaussian systems with intermittency. Nonlinearity 2012, 25, 2543. [Google Scholar] [CrossRef]
- Branicki, M.; Majda, A. Quantifying Bayesian filter performance for turbulent dynamical systems through information theory. Commun. Math. Sci 2014, 12, 901–978. [Google Scholar] [CrossRef]
- Kleeman, R. Information theory and dynamical system predictability. Entropy 2011, 13, 612–649. [Google Scholar] [CrossRef]
- Kleeman, R. Measuring dynamical prediction utility using relative entropy. J. Atmos. Sci. 2002, 59, 2057–2072. [Google Scholar] [CrossRef]
- Majda, A.; Kleeman, R.; Cai, D. A mathematical framework for quantifying predictability through relative entropy. Methods Appl. Anal. 2002, 9, 425–444. [Google Scholar]
- Majda, A.J.; Qi, D. Strategies for reduced-order models for predicting the statistical responses and uncertainty quantification in complex turbulent dynamical systems. SIAM Rev. 2018, in press. [Google Scholar] [CrossRef]
- Sapsis, T.P.; Majda, A.J. A statistically accurate modified quasilinear Gaussian closure for uncertainty quantification in turbulent dynamical systems. Phys. D Nonlinear Phenom. 2013, 252, 34–45. [Google Scholar] [CrossRef]
- Sapsis, T.P.; Majda, A.J. Statistically accurate low-order models for uncertainty quantification in turbulent dynamical systems. Proc. Natl. Acad. Sci. USA 2013, 110, 13705–13710. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J.; Giannakis, D. Predicting the cloud patterns of the Madden-Julian Oscillation through a low-order nonlinear stochastic model. Geophys. Res. Lett. 2014, 41, 5612–5619. [Google Scholar] [CrossRef]
- Harlim, J.; Mahdi, A.; Majda, A.J. An ensemble Kalman filter for statistical estimation of physics constrained nonlinear regression models. J. Comput. Phys. 2014, 257, 782–812. [Google Scholar] [CrossRef]
- Majda, A.J.; Harlim, J. Physics constrained nonlinear regression models for time series. Nonlinearity 2012, 26, 201. [Google Scholar] [CrossRef]
- Qi, D.; Majda, A.J. Predicting fat-tailed intermittent probability distributions in passive scalar turbulence with imperfect models through empirical information theory. Commun. Math. Sci. 2016, 14, 1687–1722. [Google Scholar] [CrossRef]
- Qi, D.; Majda, A.J. Low-dimensional reduced-order models for statistical response and uncertainty quantification: Two-layer baroclinic turbulence. J. Atmos. Sci. 2016, 73, 4609–4639. [Google Scholar] [CrossRef]
- Majda, A.; Chen, N. Model error, information barriers, state estimation and prediction in complex multiscale systems. Entropy 2018, 20, 644. [Google Scholar] [CrossRef]
- Marconi, U.M.B.; Puglisi, A.; Rondoni, L.; Vulpiani, A. Fluctuation–dissipation: Response theory in statistical physics. Phys. Rep. 2008, 461, 111–195. [Google Scholar] [CrossRef]
- Leith, C. Climate response and fluctuation dissipation. J. Atmos. Sci. 1975, 32, 2022–2026. [Google Scholar] [CrossRef]
- Majda, A.; Abramov, R.V.; Grote, M.J. Information Theory and Stochastics for Multiscale Nonlinear Systems; American Mathematical Society: Providence, RI, USA, 2005; Volume 25. [Google Scholar]
- Majda, A.J.; Gershgorin, B.; Yuan, Y. Low-frequency climate response and fluctuation–dissipation theorems: Theory and practice. J. Atmos. Sci. 2010, 67, 1186–1201. [Google Scholar] [CrossRef]
- Gershgorin, B.; Majda, A.J. A test model for fluctuation–dissipation theorems with time-periodic statistics. Phys. D Nonlinear Phenom. 2010, 239, 1741–1757. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Beating the curse of dimension with accurate statistics for the Fokker–Planck equation in complex turbulent systems. Proc. Natl. Acad. Sci. USA 2017, 114, 12864–12869. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Efficient statistically accurate algorithms for the Fokker–Planck equation in large dimensions. J. Comput. Phys. 2018, 354, 242–268. [Google Scholar] [CrossRef]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Kullback, S. Letter to the editor: The Kullback–Leibler distance. Am. Stat. 1987, 41, 338–341. [Google Scholar]
- Kullback, S. Statistics and Information Theory; John & Wiley Sons: New York, NY, USA, 1959. [Google Scholar]
- Branstator, G.; Teng, H. Two limits of initial-value decadal predictability in a CGCM. J. Clim. 2010, 23, 6292–6311. [Google Scholar] [CrossRef]
- DelSole, T. Predictability and information theory. Part I: Measures of predictability. J. Atmos. Sci. 2004, 61, 2425–2440. [Google Scholar] [CrossRef]
- DelSole, T. Predictability and information theory. Part II: Imperfect forecasts. J. Atmos. Sci. 2005, 62, 3368–3381. [Google Scholar] [CrossRef]
- Giannakis, D.; Majda, A.J. Quantifying the predictive skill in long-range forecasting. Part II: Model error in coarse-grained Markov models with application to ocean-circulation regimes. J. Clim. 2012, 25, 1814–1826. [Google Scholar] [CrossRef]
- Teng, H.; Branstator, G. Initial-value predictability of prominent modes of North Pacific subsurface temperature in a CGCM. Clim. Dyn. 2011, 36, 1813–1834. [Google Scholar] [CrossRef]
- Yaglom, A.M. An Introduction to the Theory of Stationary Random Functions; Courier Corporation: New York, NY, USA, 2004. [Google Scholar]
- McGraw, M.C.; Barnes, E.A. Seasonal Sensitivity of the Eddy-Driven Jet to Tropospheric Heating in an Idealized AGCM. J. Clim. 2016, 29, 5223–5240. [Google Scholar] [CrossRef]
- Majda, A.; Wang, X. Linear response theory for statistical ensembles in complex systems with time-periodic forcing. Commun. Math. Sci. 2010, 8, 145–172. [Google Scholar] [CrossRef]
- Gritsun, A.; Branstator, G. Climate response using a three-dimensional operator based on the fluctuation–dissipation theorem. J. Atmos. Sci. 2007, 64, 2558–2575. [Google Scholar] [CrossRef]
- Gritsun, A.; Branstator, G.; Majda, A. Climate response of linear and quadratic functionals using the fluctuation–dissipation theorem. J. Atmos. Sci. 2008, 65, 2824–2841. [Google Scholar] [CrossRef]
- Fuchs, D.; Sherwood, S.; Hernandez, D. An Exploration of Multivariate Fluctuation Dissipation Operators and Their Response to Sea Surface Temperature Perturbations. J. Atmos. Sci. 2015, 72, 472–486. [Google Scholar] [CrossRef]
- Lutsko, N.J.; Held, I.M.; Zurita-Gotor, P. Applying the Fluctuation-Dissipation Theorem to a Two-Layer Model of Quasigeostrophic Turbulence. J. Atmos. Sci. 2015, 72, 3161–3177. [Google Scholar] [CrossRef]
- Hassanzadeh, P.; Kuang, Z. The Linear Response Function of an Idealized Atmosphere. Part II: Implications for the Practical Use of the Fluctuation-Dissipation Theorem and the Role of Operator’s Nonnormality. J. Atmos. Sci. 2016, 73, 3441–3452. [Google Scholar] [CrossRef]
- Gritsun, A.; Lucarini, V. Fluctuations, response, and resonances in a simple atmospheric model. Phys. D Nonlinear Phenom. 2017, 349, 62–76. [Google Scholar] [CrossRef]
- Nicolis, C.; Nicolis, G. The Fluctuation-Dissipation Theorem Revisited: Beyond the Gaussian Approximation. J. Atmos. Sci. 2015, 72, 2642–2656. [Google Scholar] [CrossRef]
- Gardiner, C.W. Handbook of Stochastic Methods for Physics, Chemistry and the Natural Sciences, Volume 13 of Springer Series in Synergetics; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Risken, H. Fokker-planck equation. In The Fokker–Planck Equation; Springer: Berlin/Heidelberg, Germany, 1996; pp. 63–95. [Google Scholar]
- Daum, F. Nonlinear filters: Beyond the Kalman filter. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 57–69. [Google Scholar] [CrossRef]
- Sjöberg, P.; Lötstedt, P.; Elf, J. Fokker–Planck approximation of the master equation in molecular biology. Comput. Vis. Sci. 2009, 12, 37–50. [Google Scholar] [CrossRef]
- Majda, A.J.; Qi, D. Improving prediction skill of imperfect turbulent models through statistical response and information theory. J. Nonlinear Sci. 2016, 26, 233–285. [Google Scholar] [CrossRef]
- Proistosescu, C.; Rhines, A.; Huybers, P. Identification and interpretation of nonnormality in atmospheric time series. Geophys. Res. Lett. 2016, 43, 5425–5434. [Google Scholar] [CrossRef]
- Loikith, P.C.; Neelin, J.D. Short-tailed temperature distributions over North America and implications for future changes in extremes. Geophys. Res. Lett. 2015, 42, 8577–8585. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J.; Tong, X.T. Rigorous Analysis for Efficient Statistically Accurate Algorithms for Solving Fokker–Planck Equations in Large Dimensions. SIAM/ASA J. Uncertain. Quantif. 2018, 6, 1198–1223. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Filtering nonlinear turbulent dynamical systems through conditional Gaussian statistics. Mon. Weather Rev. 2016, 144, 4885–4917. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A. Conditional Gaussian Systems for Multiscale Nonlinear Stochastic Systems: Prediction, State Estimation and Uncertainty Quantification. Entropy 2018, 20, 509. [Google Scholar] [CrossRef]
- Liptser, R.S.; Shiryaev, A.N. Statistics of Random Processes II: Applications; Springer: Berlin/Heidelberg, Germany, 2001; pp. 177–218. [Google Scholar]
- Chen, N.; Majda, A.J. Predicting the real-time multivariate Madden–Julian oscillation index through a low-order nonlinear stochastic model. Mon. Weather Rev. 2015, 143, 2148–2169. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Predicting the Cloud Patterns for the Boreal Summer Intraseasonal Oscillation Through a Low-Order Stochastic Model. Math. Clim. Weather Forecast. 2015, 1, 1–20. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J.; Sabeerali, C.; Ajayamohan, R. Predicting Monsoon Intraseasonal Precipitation using a Low-Order Nonlinear Stochastic Model. J. Clim. 2018, 31, 4403–4427. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Filtering the stochastic skeleton model for the Madden–Julian oscillation. Mon. Weather Rev. 2016, 144, 501–527. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J.; Tong, X.T. Information barriers for noisy Lagrangian tracers in filtering random incompressible flows. Nonlinearity 2014, 27, 2133. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J.; Tong, X.T. Noisy Lagrangian tracers for filtering random rotating compressible flows. J. Nonlinear Sci. 2015, 25, 451–488. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Model error in filtering random compressible flows utilizing noisy Lagrangian tracers. Mon. Weather Rev. 2016, 144, 4037–4061. [Google Scholar] [CrossRef]
- Branicki, M.; Majda, A.J. Dynamic stochastic superresolution of sparsely observed turbulent systems. J. Comput. Phys. 2013, 241, 333–363. [Google Scholar] [CrossRef]
- Keating, S.R.; Majda, A.J.; Smith, K.S. New methods for estimating ocean eddy heat transport using satellite altimetry. Mon. Weather Rev. 2012, 140, 1703–1722. [Google Scholar] [CrossRef]
- Majda, A.J.; Grooms, I. New perspectives on super-parameterization for geophysical turbulence. J. Comput. Phys. 2014, 271, 60–77. [Google Scholar] [CrossRef]
- Majda, A.J.; Qi, D.; Sapsis, T.P. Blended particle filters for large-dimensional chaotic dynamical systems. Proc. Natl. Acad. Sci. USA 2014, 111, 7511–7516. [Google Scholar] [CrossRef]
- Botev, Z.I.; Grotowski, J.F.; Kroese, D.P. Kernel density estimation via diffusion. Ann. Stat. 2010, 38, 2916–2957. [Google Scholar] [CrossRef]
- Cooper, F.C.; Haynes, P.H. Climate Sensitivity via a Nonparametric Fluctuation–Dissipation Theorem. J. Atmos. Sci. 2011, 68, 937–953. [Google Scholar] [CrossRef]
- Crommelin, D.; Majda, A. Strategies for model reduction: Comparing different optimal bases. J. Atmos. Sci. 2004, 61, 2206–2217. [Google Scholar] [CrossRef]
- Mezić, I. Spectral properties of dynamical systems, model reduction and decompositions. Nonlinear Dyn. 2005, 41, 309–325. [Google Scholar] [CrossRef]
- Gouda, M.; Danaher, S.; Underwood, C. Building thermal model reduction using nonlinear constrained optimization. Build. Environ. 2002, 37, 1255–1265. [Google Scholar] [CrossRef]
- Majda, A.J.; Harlim, J.; Gershgorin, B. Mathematical strategies for filtering turbulent dynamical systems. Discret. Contin. Dyn. Syst. 2010, 27, 441–486. [Google Scholar] [CrossRef]
- Plant, R.; Craig, G.C. A stochastic parameterization for deep convection based on equilibrium statistics. J. Atmos. Sci. 2008, 65, 87–105. [Google Scholar] [CrossRef]
- Lin, J.W.B.; Neelin, J.D. Influence of a stochastic moist convective parameterization on tropical climate variability. Geophys. Res. Lett. 2000, 27, 3691–3694. [Google Scholar] [CrossRef]
- Frenkel, Y.; Majda, A.J.; Khouider, B. Using the stochastic multicloud model to improve tropical convective parameterization: A paradigm example. J. Atmos. Sci. 2012, 69, 1080–1105. [Google Scholar] [CrossRef]
- Jung, T.; Palmer, T.; Shutts, G. Influence of a stochastic parameterization on the frequency of occurrence of North Pacific weather regimes in the ECMWF model. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Majda, A.J.; Abramov, R.; Gershgorin, B. High skill in low-frequency climate response through fluctuation dissipation theorems despite structural instability. Proc. Natl. Acad. Sci. USA 2010, 107, 581–586. [Google Scholar] [CrossRef]
- Majda, A.J.; Franzke, C.; Crommelin, D. Normal forms for reduced stochastic climate models. Proc. Natl. Acad. Sci. USA 2009, 106, 3649–3653. [Google Scholar] [CrossRef]
- Franzke, C.; Majda, A.J. Low-order stochastic mode reduction for a prototype atmospheric GCM. J. Atmos. Sci. 2006, 63, 457–479. [Google Scholar] [CrossRef]
- Thual, S.; Majda, A.J.; Chen, N.; Stechmann, S.N. Simple stochastic model for El Niño with westerly wind bursts. Proc. Natl. Acad. Sci. USA 2016, 113, 10245–10250. [Google Scholar] [CrossRef]
- Vecchi, G.A.; Harrison, D. Tropical Pacific sea surface temperature anomalies, El Niño, and equatorial westerly wind events. J. Clim. 2000, 13, 1814–1830. [Google Scholar] [CrossRef]
- Tziperman, E.; Yu, L. Quantifying the dependence of westerly wind bursts on the large-scale tropical Pacific SST. J. Clim. 2007, 20, 2760–2768. [Google Scholar] [CrossRef]
- Wolter, K.; Timlin, M.S. El Niño/Southern Oscillation behaviour since 1871 as diagnosed in an extended multivariate ENSO index (MEI. ext). Int. J. Climatol. 2011, 31, 1074–1087. [Google Scholar] [CrossRef]
- McPhaden, M. Playing hide and seek with El Niño. Nat. Clim. Chang. 2015, 5, 791. [Google Scholar] [CrossRef]
- Hendon, H.H.; Wheeler, M.C.; Zhang, C. Seasonal dependence of the MJO–ENSO relationship. J. Clim. 2007, 20, 531–543. [Google Scholar] [CrossRef]
- Tang, Y.; Yu, B. MJO and its relationship to ENSO. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Lau, W.K.M.; Waliser, D.E. Intraseasonal Variability in the Atmosphere-Ocean Climate System; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Kalman, R.E.; Bucy, R.S. New results in linear filtering and prediction theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Brammer, K.; Siffling, G. Kalman-Bucy Filters; Artech House on Demand: London, UK, 1989. [Google Scholar]
- Bucy, R.S.; Joseph, P.D. Filtering for Stochastic Processes with Applications to Guidance; American Mathematical Society: Providence, RI, USA, 1987; Volume 326. [Google Scholar]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Courier Corporation: New York, NY, USA, 2007. [Google Scholar]
- Ratnaparkhi, A. A Simple Introduction to Maximum Entropy Models for Natural Language Processing; IRCS Technical Reports Series; Penn Libraries: Philadelphia, PA, USA, 1997; p. 81. [Google Scholar]
- Sobezyk, K.; Trebicki, J. Maximum entropy principle in stochastic dynamics. Probab. Eng. Mech. 1990, 5, 102–110. [Google Scholar] [CrossRef]
- Branicki, M.; Chen, N.; Majda, A.J. Non-Gaussian test models for prediction and state estimation with model errors. Chin. Ann. Math. Ser. B 2013, 34, 29–64. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | (b) | (c) | |
|---|---|---|---|
| model error in equilibrium statistics | 0.0142 | 0.0578 | 0.5420 |
| model error in spectrum density | 0.0173 | 0.0185 | 0.1023 |
| FDT (exact) | FDT (qG) | FDT (GM) | |
|---|---|---|---|
| u (2 moments) | 0.0034 | 0.0268 | 0.0040 |
| u (4 moments) | 0.0040 | 0.7524 | 0.0044 |
| FDT (exact; joint) | FDT (qG; joint) | FDT (GM; joint) | FDT (qG; marginal) | FDT (GM; marginal) | |
|---|---|---|---|---|---|
| u (2 moments) | 0.0241 | 0.0596 | 0.0312 | 0.0659 | 0.0601 |
| v (2 moments) | 0.0074 | 0.2340 | 0.0121 | ||
| u (4 moments) | 0.0346 | 0.1696 | 0.0379 | 0.0823 | 0.0752 |
| v (4 moments) | 0.0061 | 2.9144 | 0.0093 |
| FDT (exact) | FDT (qG) | FDT (GM) | |
|---|---|---|---|
| (2 moments) | 0.0028 | 4.4909 | 0.0086 |
| (2 moments) | 0.0001 | 4.3432 | 0.0038 |
| (2 moments) | 0.0006 | 3.5908 | 0.0047 |
| (4 moments) | 0.0230 | 2.1175 | 0.0107 |
| (4 moments) | 0.0047 | 2.3717 | 0.0096 |
| (4 moments) | 0.0006 | 2.0072 | 0.0050 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, N.; Hou, X.; Li, Q.; Li, Y. Understanding and Predicting Nonlinear Turbulent Dynamical Systems with Information Theory. Atmosphere 2019, 10, 248. https://doi.org/10.3390/atmos10050248
Chen N, Hou X, Li Q, Li Y. Understanding and Predicting Nonlinear Turbulent Dynamical Systems with Information Theory. Atmosphere. 2019; 10(5):248. https://doi.org/10.3390/atmos10050248
Chicago/Turabian StyleChen, Nan, Xiao Hou, Qin Li, and Yingda Li. 2019. "Understanding and Predicting Nonlinear Turbulent Dynamical Systems with Information Theory" Atmosphere 10, no. 5: 248. https://doi.org/10.3390/atmos10050248
APA StyleChen, N., Hou, X., Li, Q., & Li, Y. (2019). Understanding and Predicting Nonlinear Turbulent Dynamical Systems with Information Theory. Atmosphere, 10(5), 248. https://doi.org/10.3390/atmos10050248