Figure 1.
A commercial over-the-row (OTR) berry harvester manufactured by Littau Harvester (Stayton, OR, USA). OTR berry harvesters are self-propelled with the driver positioned on the top platform. The frame is sufficiently sized to straddle blueberry plants that could be >2.5-m tall and >1.5-m wide. Inside the tunnel of the harvester frame, two vertically-oriented rotary, drum shakers are mounted. Closer to the ground, there are catcher plates and conveyor belts installed to collect and transfer detached fruit to the rear and some units to the top platform. Fruit then passes through a blower to separate the trash and debris (e.g., leaves, small berries, and stems) before dropping into a lug.
Figure 1.
A commercial over-the-row (OTR) berry harvester manufactured by Littau Harvester (Stayton, OR, USA). OTR berry harvesters are self-propelled with the driver positioned on the top platform. The frame is sufficiently sized to straddle blueberry plants that could be >2.5-m tall and >1.5-m wide. Inside the tunnel of the harvester frame, two vertically-oriented rotary, drum shakers are mounted. Closer to the ground, there are catcher plates and conveyor belts installed to collect and transfer detached fruit to the rear and some units to the top platform. Fruit then passes through a blower to separate the trash and debris (e.g., leaves, small berries, and stems) before dropping into a lug.
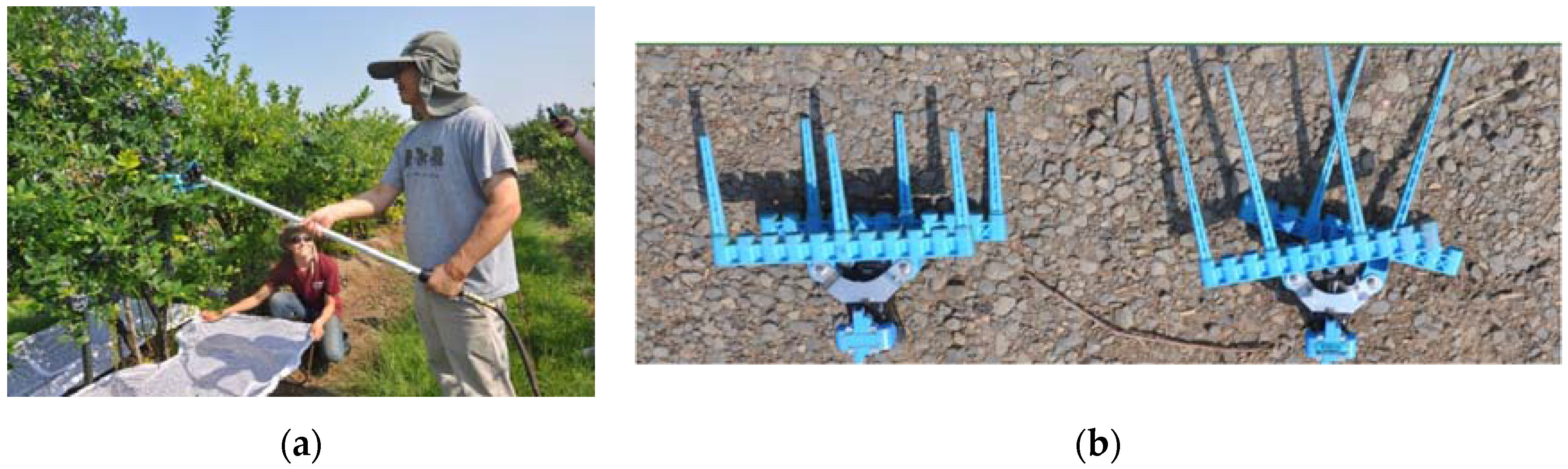
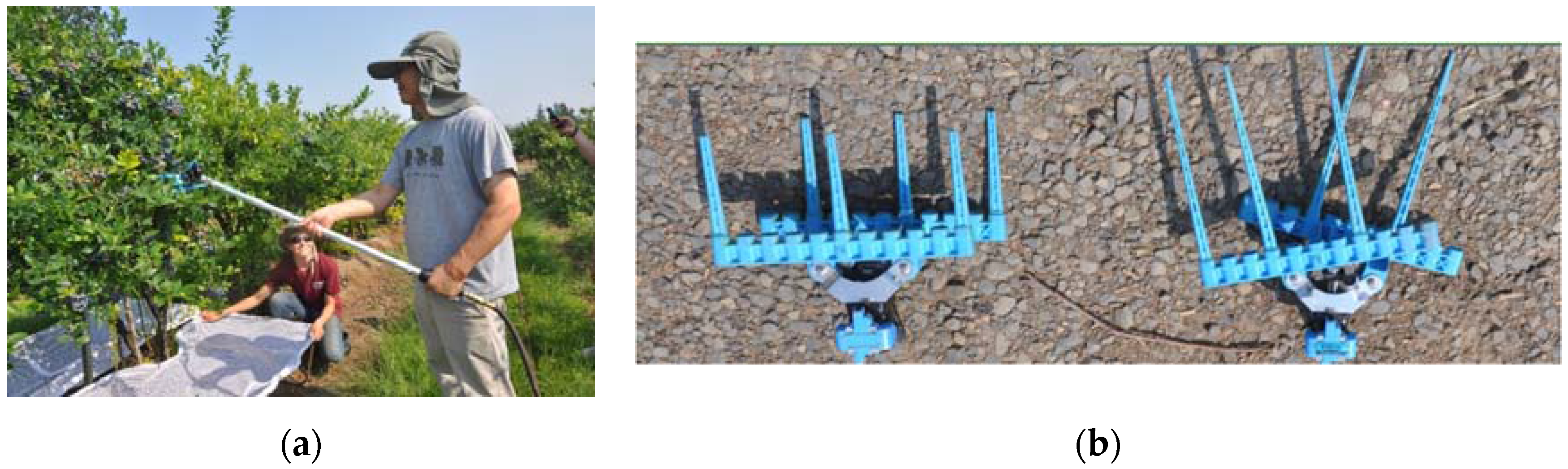
Figure 2.
(a) A hand-held, pneumatic shaker (Golia model) engaging a blueberry plant with mature fruit. Two portable catch frames each with netted fabric were placed tightly against the plants for collecting detached blueberries; (b) The shaking heads of Golia olive shaker (Campagnola, Bologna, Italy) used in the study shown with short (12.5-cm long (left)) and long (23-cm long (right)) tines.
Figure 2.
(a) A hand-held, pneumatic shaker (Golia model) engaging a blueberry plant with mature fruit. Two portable catch frames each with netted fabric were placed tightly against the plants for collecting detached blueberries; (b) The shaking heads of Golia olive shaker (Campagnola, Bologna, Italy) used in the study shown with short (12.5-cm long (left)) and long (23-cm long (right)) tines.
Figure 3.
Harvesting blueberries with a semi-mechanical harvest-assist system consisting of hand-held pneumatic shakers to detach fruit and platforms to collect detached fruit. The frame is manually pulled/pushed over plants and the fruit catching platforms are pulled out while positioning the frame over the plants to be harvested and pushed towards each other to seal around the base of blueberry plants. Shown here are two workers harvesting blueberries with hand-held shakers. The yellow hoses carry pressurized air from a compressor to shakers. Yellow fruit lugs are positioned below the catching surface. The inclined catching surface diverted detached fruit into lugs.
Figure 3.
Harvesting blueberries with a semi-mechanical harvest-assist system consisting of hand-held pneumatic shakers to detach fruit and platforms to collect detached fruit. The frame is manually pulled/pushed over plants and the fruit catching platforms are pulled out while positioning the frame over the plants to be harvested and pushed towards each other to seal around the base of blueberry plants. Shown here are two workers harvesting blueberries with hand-held shakers. The yellow hoses carry pressurized air from a compressor to shakers. Yellow fruit lugs are positioned below the catching surface. The inclined catching surface diverted detached fruit into lugs.
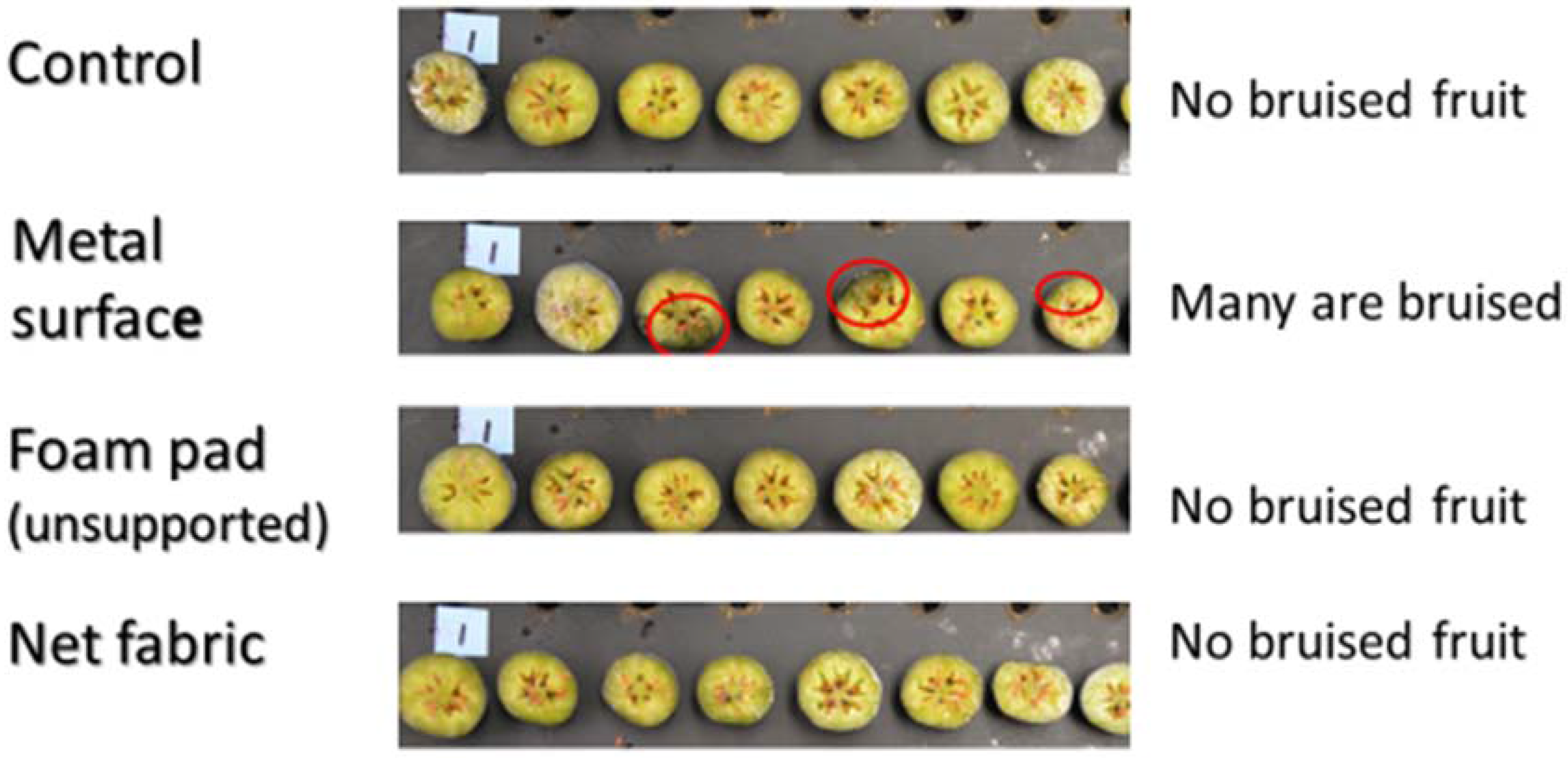
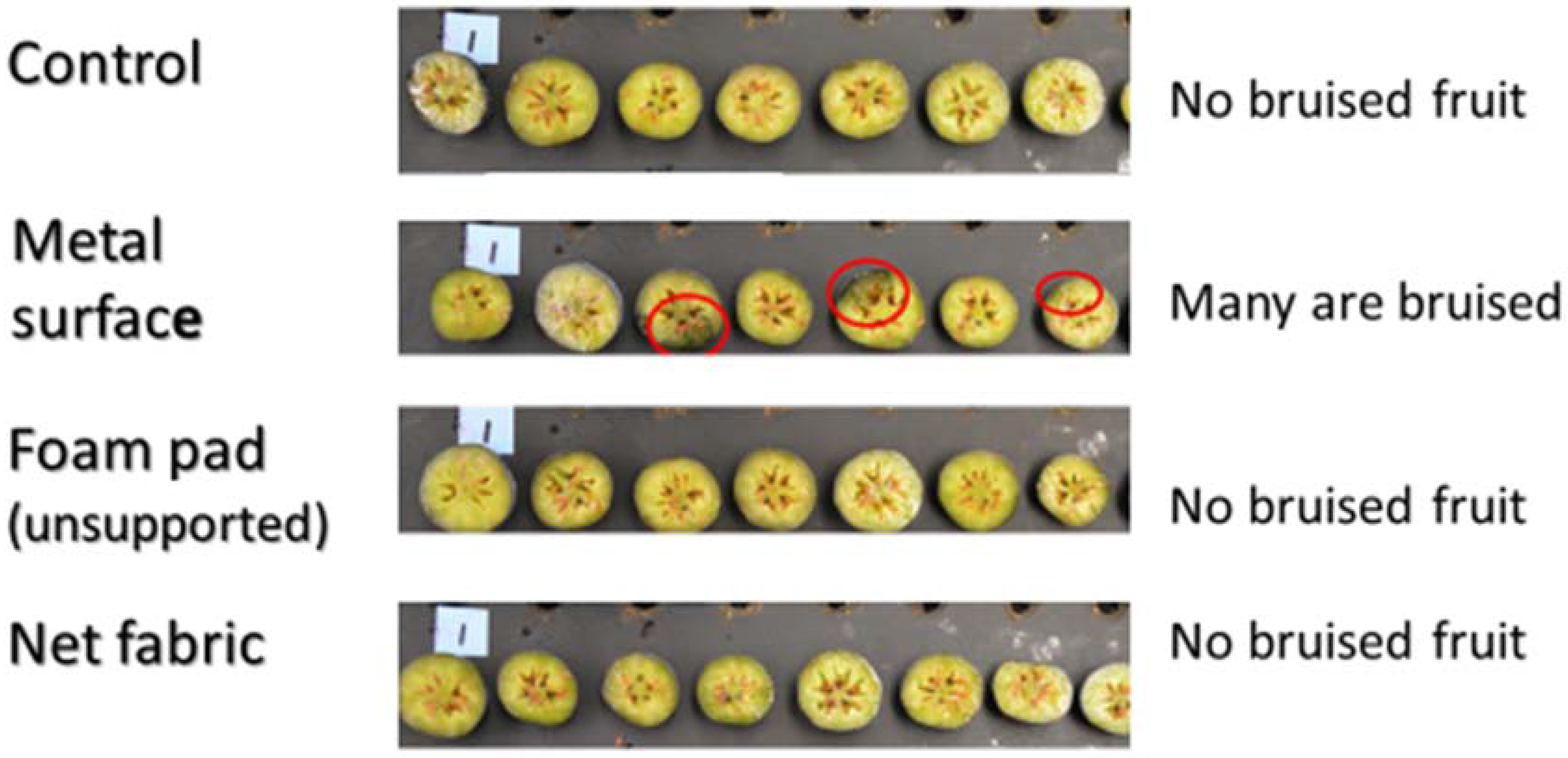
Figure 4.
The effect of fruit catching surface on extent of bruise damage in the fruit of southern highbush blueberry ‘Flicker’. Fruit was harvested by hand (Control) and semi-mechanical harvesting system using a harvest-assist platform. Hand harvested fruit was dropped into a 5-L plastic pail. With the semi-mechanical system, fruit was detached with a hand-held ‘Golia’ olive shaker and detached fruit landed on platform’s metal surface or onto a pad or net fabric suspended over the metal surface. A fruit damage by impact was initially indicated by water soaked tissues and then after about 1 h the damaged area turned darker (circled in red).
Figure 4.
The effect of fruit catching surface on extent of bruise damage in the fruit of southern highbush blueberry ‘Flicker’. Fruit was harvested by hand (Control) and semi-mechanical harvesting system using a harvest-assist platform. Hand harvested fruit was dropped into a 5-L plastic pail. With the semi-mechanical system, fruit was detached with a hand-held ‘Golia’ olive shaker and detached fruit landed on platform’s metal surface or onto a pad or net fabric suspended over the metal surface. A fruit damage by impact was initially indicated by water soaked tissues and then after about 1 h the damaged area turned darker (circled in red).
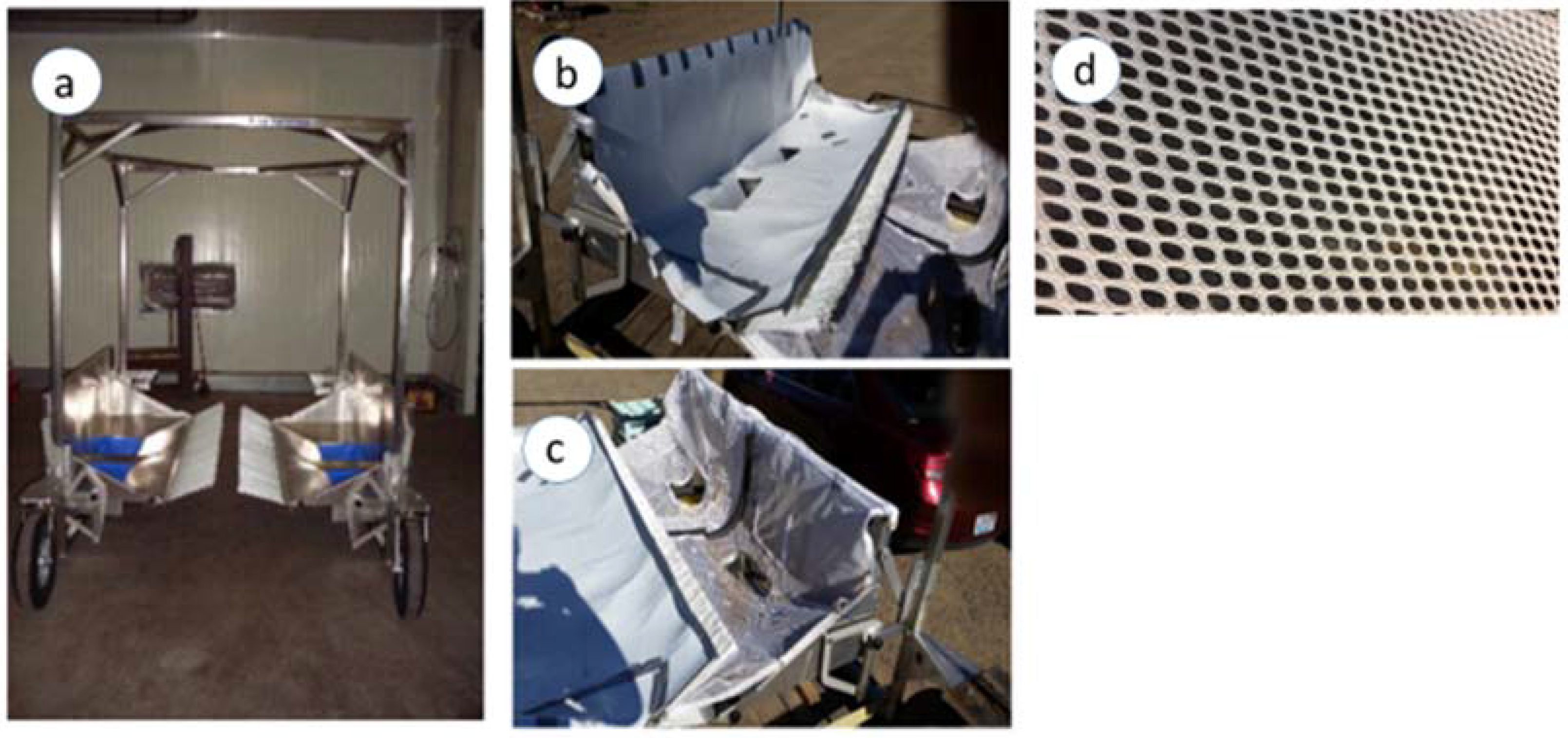
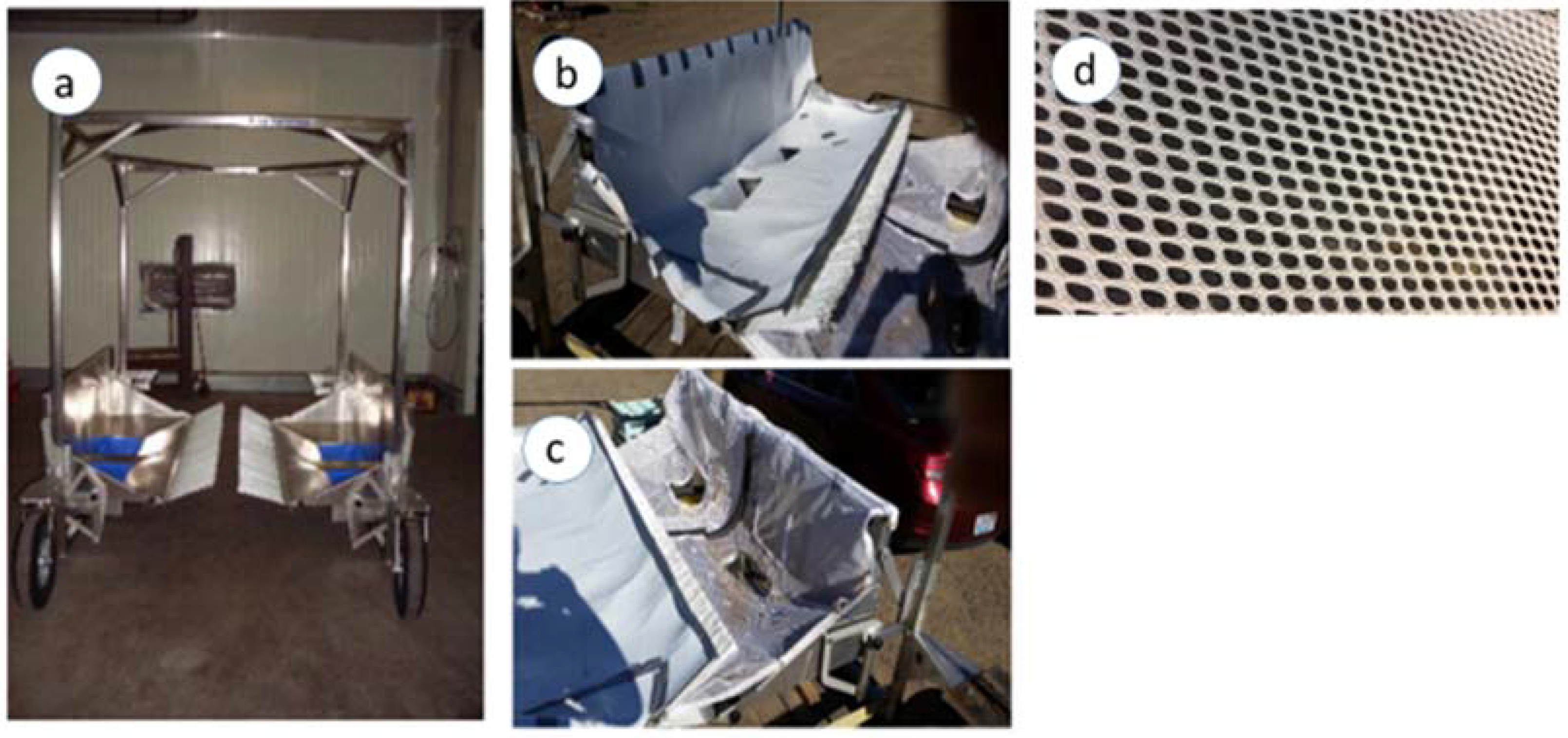
Figure 5.
Harvest-assist platform for semi-mechanical harvesting of blueberries. (a) A harvest-assist platform (BBC Technologies, Fresno, CA, USA) shown with left-side and right-side stainless steel fruit catching surface and brush bristle in the middle to seal around individual blueberry plants; (b) A close-up of the modified fruit catching surface constructed with foam pad installed about 3 cm over the stainless steel surface; (c) Shown is a woven net fabric suspended over the other catching surface; (d) A close of the netted woven fabric installed on one side of the harvest-assist platform.
Figure 5.
Harvest-assist platform for semi-mechanical harvesting of blueberries. (a) A harvest-assist platform (BBC Technologies, Fresno, CA, USA) shown with left-side and right-side stainless steel fruit catching surface and brush bristle in the middle to seal around individual blueberry plants; (b) A close-up of the modified fruit catching surface constructed with foam pad installed about 3 cm over the stainless steel surface; (c) Shown is a woven net fabric suspended over the other catching surface; (d) A close of the netted woven fabric installed on one side of the harvest-assist platform.
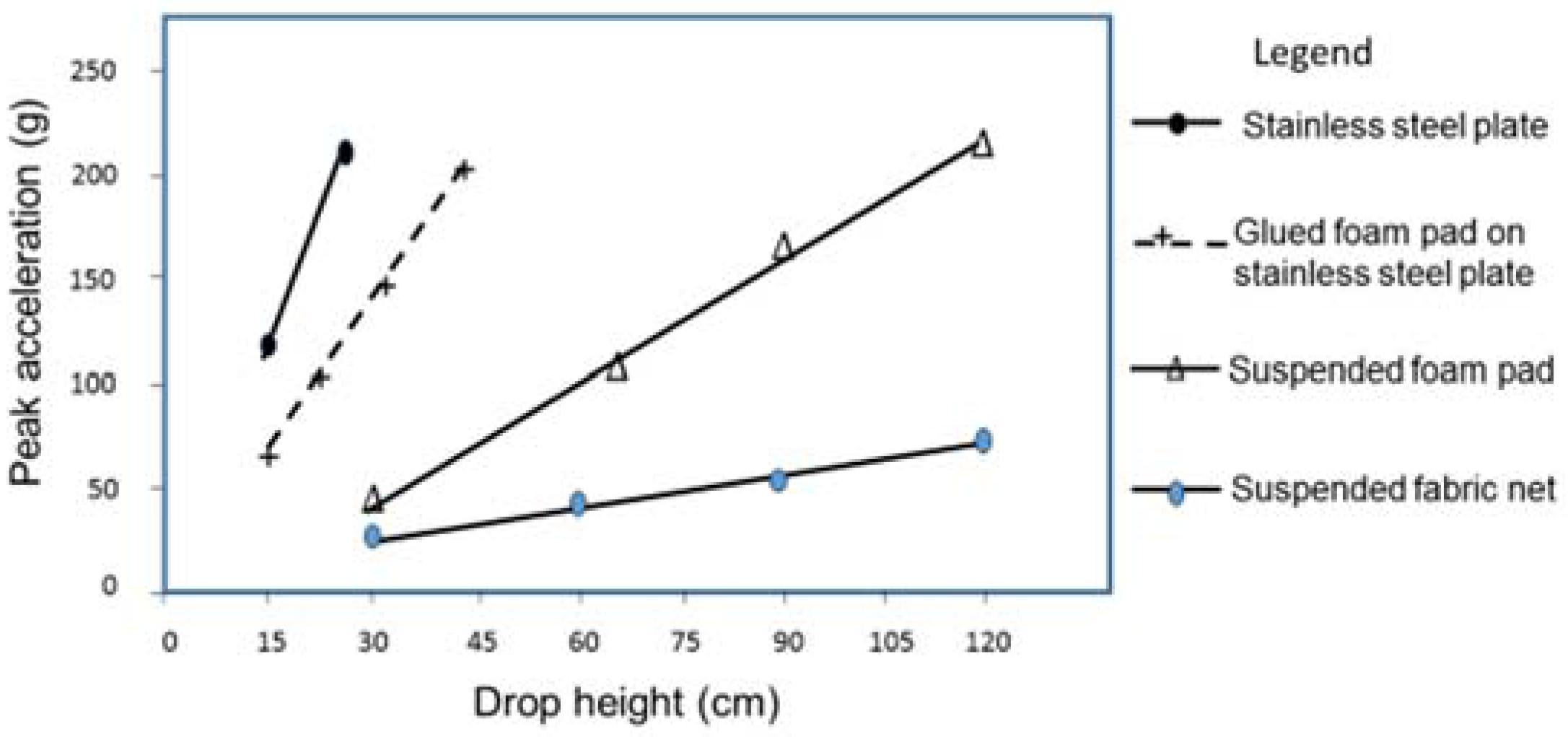
Figure 6.
The relationship between impact levels and contact surface materials. The BIRD sensor was dropped on four different contact surface materials installed on the harvest-assist platform: Stainless steel plate, foam pad glued onto the stainless steel plate, unsupported foam pad installed over the stainless steel plate, and woven net fabric suspended over the stainless steel plate. Data points are the means of 10 recordings by the BIRD sensor for each drop height and only the first impact of each drop was collected for further data analysis. The BIRD sensor recorded impacts in three orthogonal directions. The largest acceleration value from each of the x, y, and z accelerometers captured during the first impact was summed to calculate the peak acceleration. Peak acceleration reflects the magnitude of the impact.
Figure 6.
The relationship between impact levels and contact surface materials. The BIRD sensor was dropped on four different contact surface materials installed on the harvest-assist platform: Stainless steel plate, foam pad glued onto the stainless steel plate, unsupported foam pad installed over the stainless steel plate, and woven net fabric suspended over the stainless steel plate. Data points are the means of 10 recordings by the BIRD sensor for each drop height and only the first impact of each drop was collected for further data analysis. The BIRD sensor recorded impacts in three orthogonal directions. The largest acceleration value from each of the x, y, and z accelerometers captured during the first impact was summed to calculate the peak acceleration. Peak acceleration reflects the magnitude of the impact.
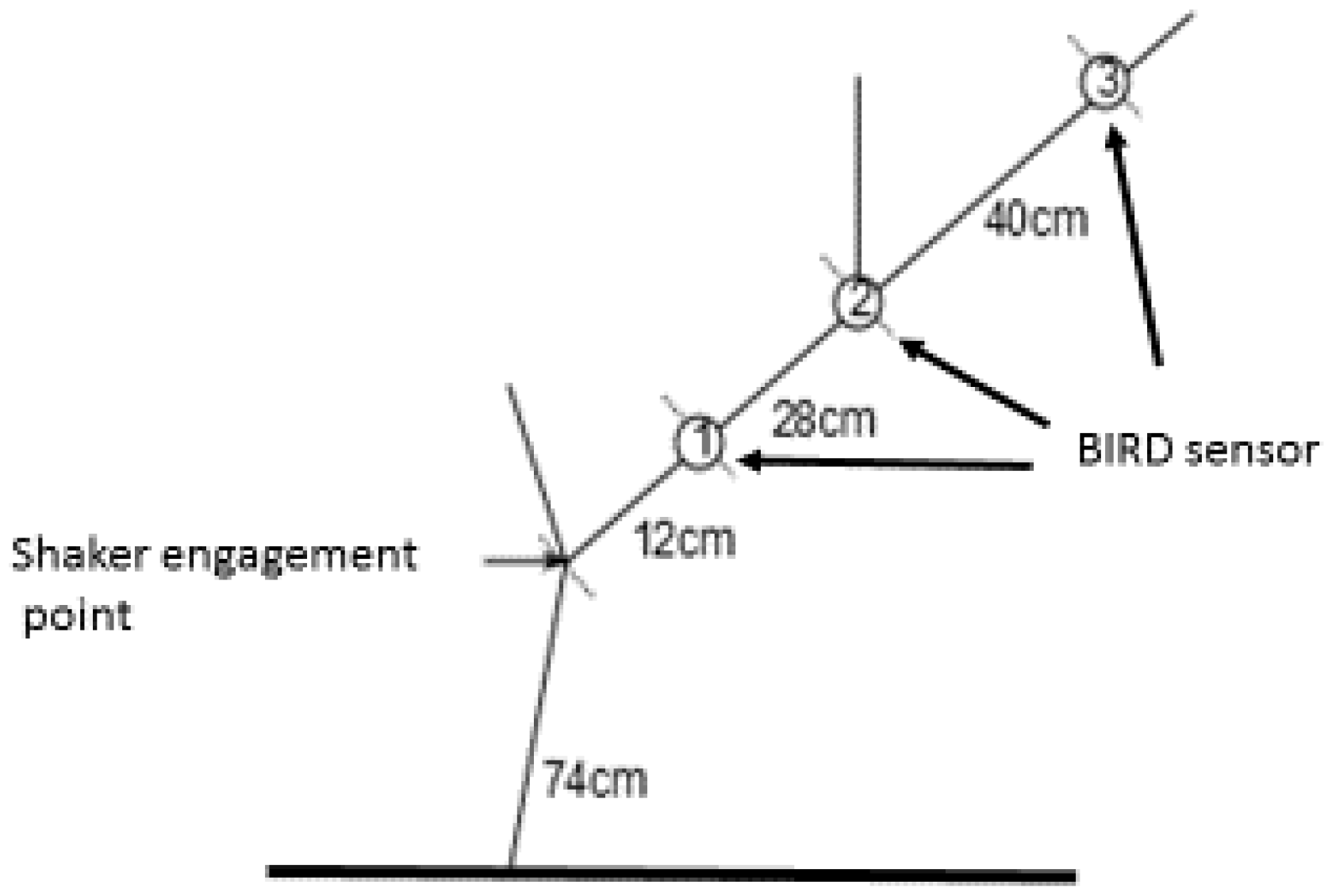
Figure 7.
A drawing of the blueberry cane denoting the locations of BIRD sensor attachments and where the pneumatic shaker engaged the plant.
Figure 7.
A drawing of the blueberry cane denoting the locations of BIRD sensor attachments and where the pneumatic shaker engaged the plant.
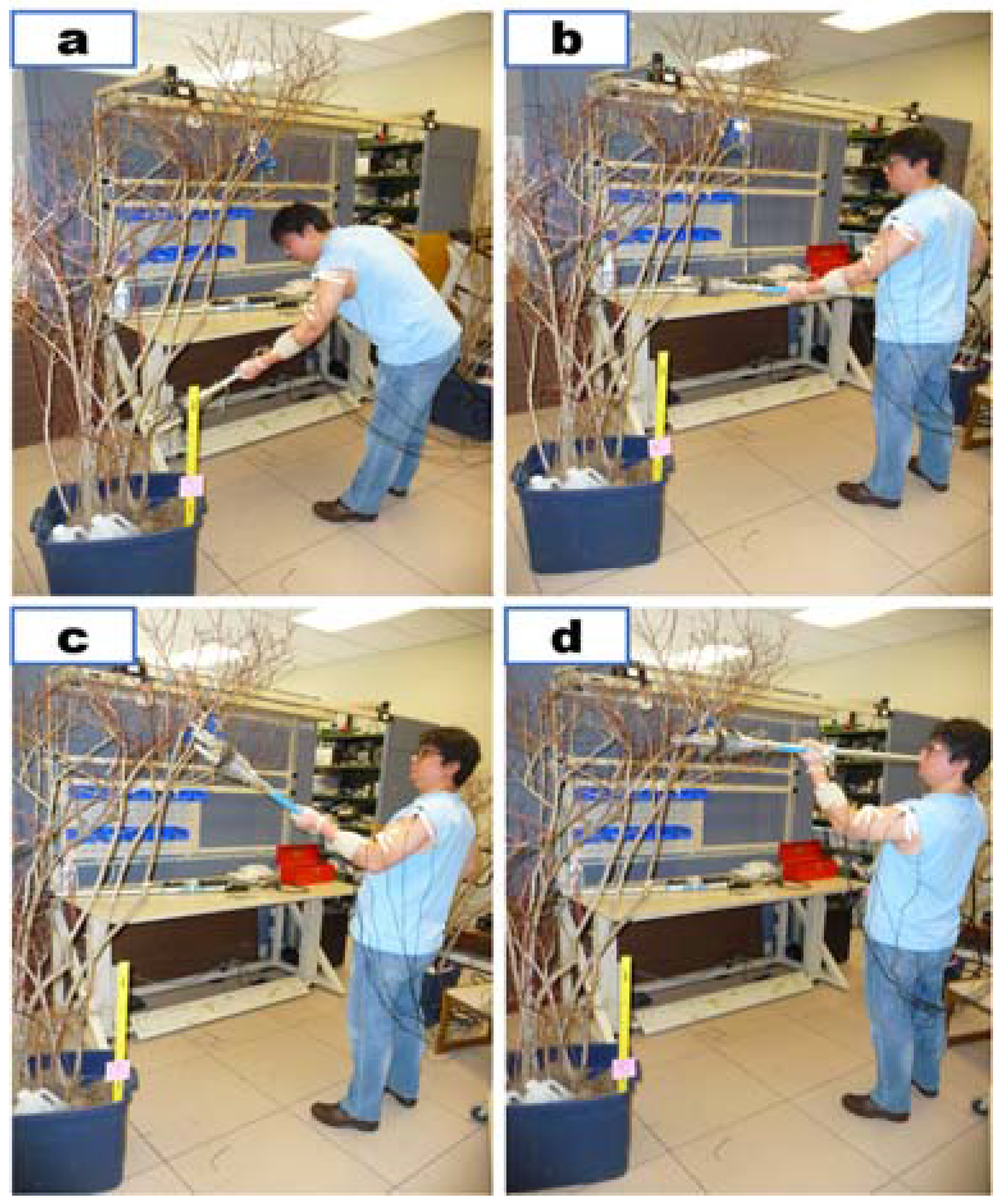
Figure 8.
Ergonomic evaluation of portable hand-held shaker used for harvesting blueberries. Muscle activity was measured using electromyography. The electrode sensors were attached on multiple body regions: Forearm, upper arm, shoulder, and lower back. The shaker was operated with the operator in bent (a), standing (b), arched backward (c), and standing (d) postures.
Figure 8.
Ergonomic evaluation of portable hand-held shaker used for harvesting blueberries. Muscle activity was measured using electromyography. The electrode sensors were attached on multiple body regions: Forearm, upper arm, shoulder, and lower back. The shaker was operated with the operator in bent (a), standing (b), arched backward (c), and standing (d) postures.
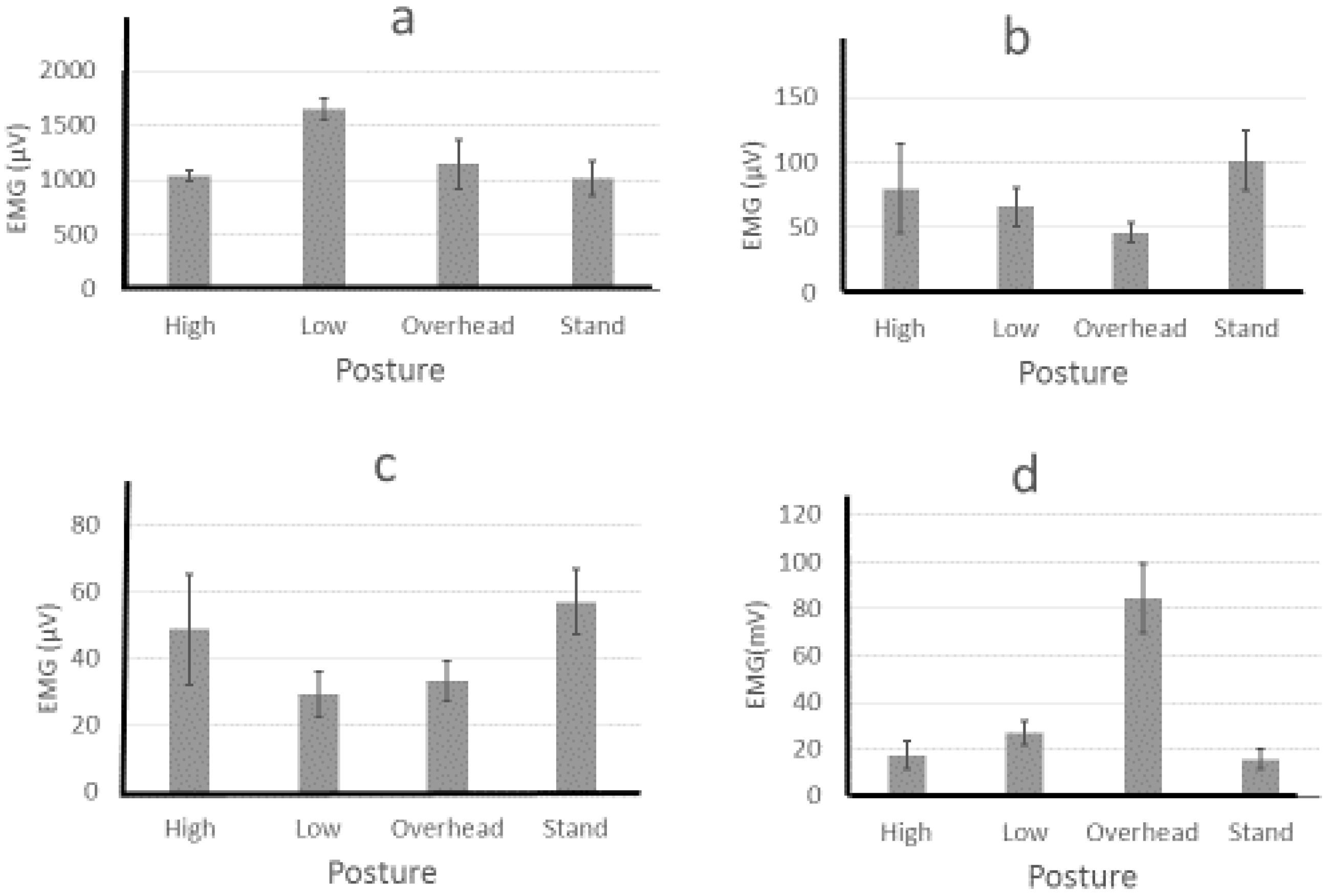
Figure 9.
Muscle activity measured by electromyography as EMG (μV) was recorded by electrode sensors attached to the lower back (a), bicep (b), forearm (c), and shoulder (lower deltoid) (d) while human subjects operated a hand-held blueberry shaker in four postures: High (arched back with shaker head above shoulder height), Low (bent at waist with shaker head below waist), Overhead (straight back with both arms raised), and Standing (straight back and shaker at waist height). The vertical lines at the top of the bars represent the standard error of the mean.
Figure 9.
Muscle activity measured by electromyography as EMG (μV) was recorded by electrode sensors attached to the lower back (a), bicep (b), forearm (c), and shoulder (lower deltoid) (d) while human subjects operated a hand-held blueberry shaker in four postures: High (arched back with shaker head above shoulder height), Low (bent at waist with shaker head below waist), Overhead (straight back with both arms raised), and Standing (straight back and shaker at waist height). The vertical lines at the top of the bars represent the standard error of the mean.
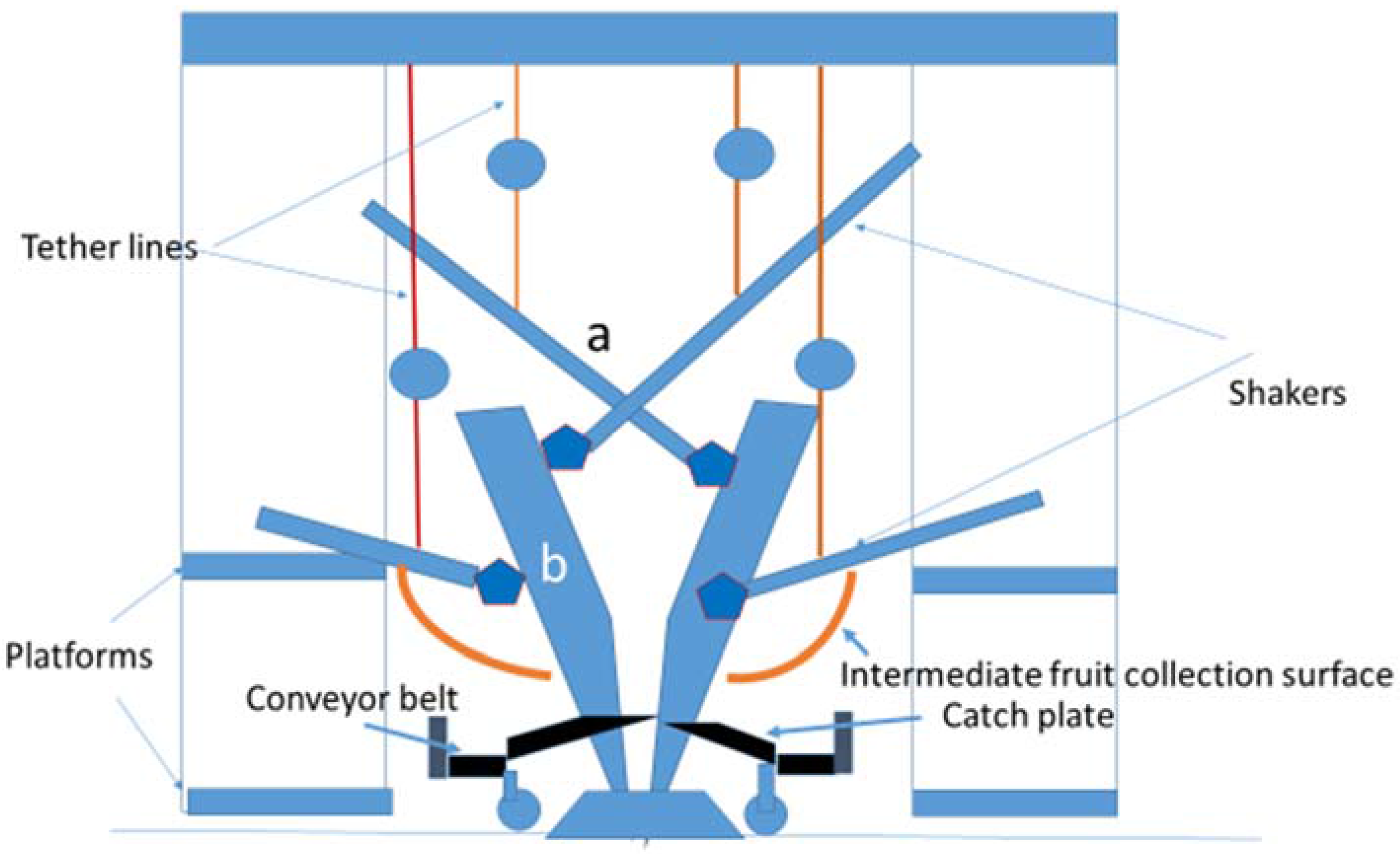
Figure 10.
A drawing of the proposed mobile, semi-mechanical blueberry harvesting platform with hand-held shaker (a) tethered to the platform. The harvesting platform will have two levels on each side to position shaker operators. The lower level for the operator to engage the lower section of the blueberry plant (b) and the upper level for engaging the upper portion of the plant. Stool seats (not shown) will be installed on the platforms for workers to set and operate the shakers that are tethered to the harvesting platform with a tool balancer. The detached fruit is collected on the intermediate fruit collecting surface and soft catch plates. Decelerated fruit will roll onto the conveyor belt and transferred to fruit lugs.
Figure 10.
A drawing of the proposed mobile, semi-mechanical blueberry harvesting platform with hand-held shaker (a) tethered to the platform. The harvesting platform will have two levels on each side to position shaker operators. The lower level for the operator to engage the lower section of the blueberry plant (b) and the upper level for engaging the upper portion of the plant. Stool seats (not shown) will be installed on the platforms for workers to set and operate the shakers that are tethered to the harvesting platform with a tool balancer. The detached fruit is collected on the intermediate fruit collecting surface and soft catch plates. Decelerated fruit will roll onto the conveyor belt and transferred to fruit lugs.
Figure 11.
The fruit harvested by the experimental semi-mechanical harvesting system prior to sorting. Fruit consisted mostly of blue-colored fruit and some green-colored (shown circled in green) and red-colored (shown circled in red) fruit. The latter two categories are culled manually and by electronic sorting machines on the packing line and only the blue-colored fruit are packaged. Occasionally, machine-harvested fruit have over-ripe and smashed berries (not shown).
Figure 11.
The fruit harvested by the experimental semi-mechanical harvesting system prior to sorting. Fruit consisted mostly of blue-colored fruit and some green-colored (shown circled in green) and red-colored (shown circled in red) fruit. The latter two categories are culled manually and by electronic sorting machines on the packing line and only the blue-colored fruit are packaged. Occasionally, machine-harvested fruit have over-ripe and smashed berries (not shown).
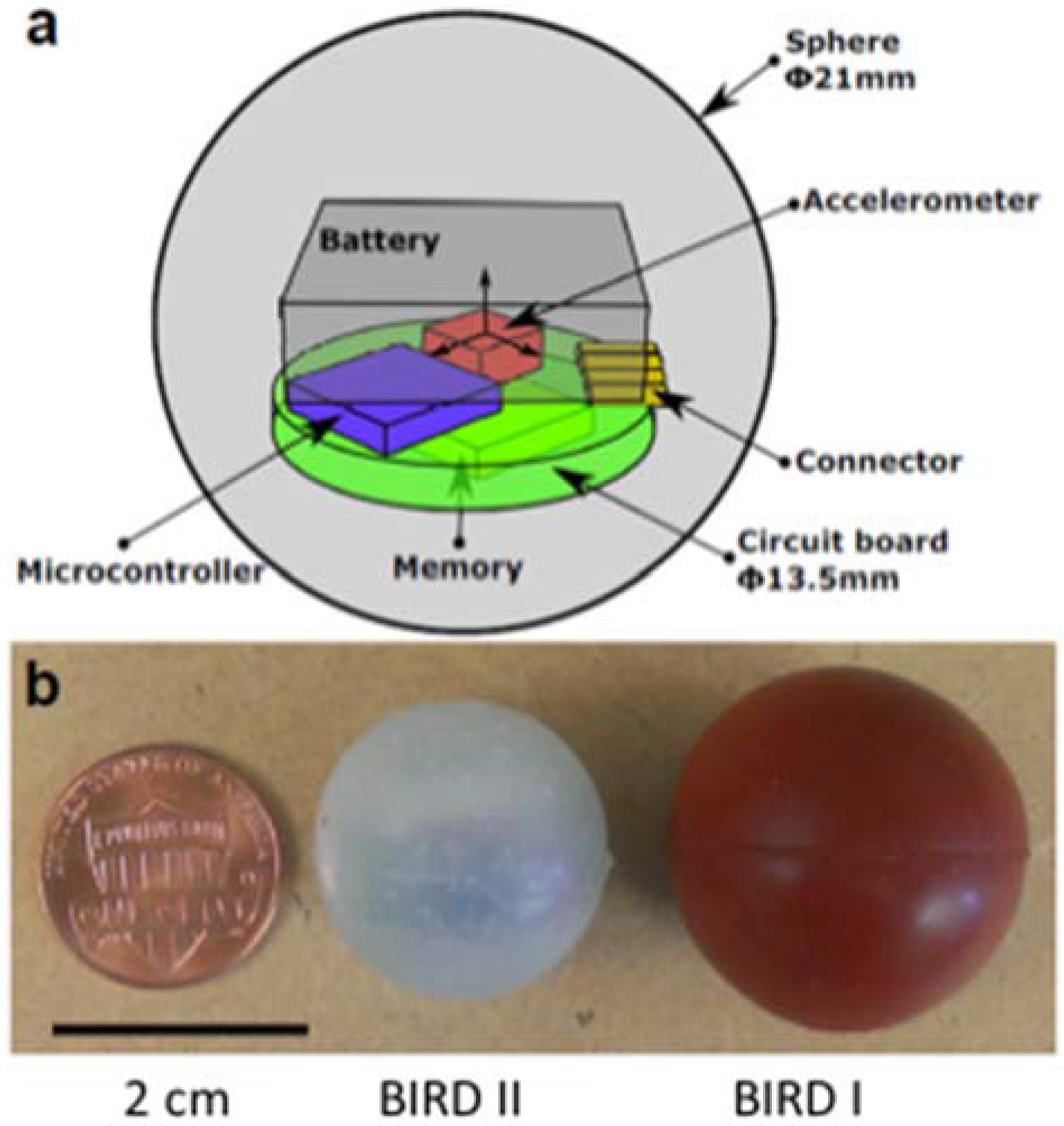
Figure 12.
The blueberry impact recording device (BIRD) sensor (a). The electronic circuit board was cast in silicon rubber. The BIRD II sensor (b) used in this study is a an instrumented sphere with a diameter of 22 mm and mass of 6 grams and housing a microcontroller-based data logger which measures mechanical impacts in three orthogonal directions with a tri-axial accelerometer with sensing range of ± 346 g (gravitational acceleration, g = 9.8 m/s2) in the vector summation and maximum of 2 KHz sampling frequency. The sensor was fully calibrated using a centrifuge and an impact table. The accuracy of the sensor was between 0.50% and 0.63% and the precision error was within 0.06% to 0.23%. For size comparison, the BIRD II sensor placed alongside a US penny coin (left) and the original BIRD I sensor (right).
Figure 12.
The blueberry impact recording device (BIRD) sensor (a). The electronic circuit board was cast in silicon rubber. The BIRD II sensor (b) used in this study is a an instrumented sphere with a diameter of 22 mm and mass of 6 grams and housing a microcontroller-based data logger which measures mechanical impacts in three orthogonal directions with a tri-axial accelerometer with sensing range of ± 346 g (gravitational acceleration, g = 9.8 m/s2) in the vector summation and maximum of 2 KHz sampling frequency. The sensor was fully calibrated using a centrifuge and an impact table. The accuracy of the sensor was between 0.50% and 0.63% and the precision error was within 0.06% to 0.23%. For size comparison, the BIRD II sensor placed alongside a US penny coin (left) and the original BIRD I sensor (right).
Table 1.
The effect of shaker parameters on fruit detachment of ‘Draper’, ‘Legacy’, and ‘Liberty’ northern highbush blueberry. x
Table 1.
The effect of shaker parameters on fruit detachment of ‘Draper’, ‘Legacy’, and ‘Liberty’ northern highbush blueberry. x
| Shaker Setting | Cultivar |
|---|
| Draper | Legacy | Liberty |
|---|
| Pressure (psi) | Tine Length (cm) | Harvest Rate (kg/min) | Blue Fruit (%) | Harvest Rate (kg/min) | Blue Fruit (%) | Harvest Rate (kg/min) | Blue Fruit (%) |
|---|
| 45 | 12.5 | 0.80 b y | 81 b | 2.47 a | 94 b | 1.09 ab | 96 a |
| 45 | 22.5 | 1.50 a | 78 b | 2.97 a | 93 b | 1.93 a | 91 a |
| 65 | 12.5 | 0.97 b | 83 b | 0.95 b | 91 b | 1.47 a | 97 a |
| 65 | 22.5 | 1.54 a | 82 b | 2.55 a | 85 c | 2.03 a | 91 a |
| Hand harvest | 0.25 c | 89 a | 0.48 c | 98 a | 0.13 b | 92 a |
Table 2.
Fruit firmness and bruise damage ‘Draper’, ‘Legacy’ and ‘Liberty’ northern highbush blueberries harvested by hand into a pail and with a hand held semi-mechanical shaker and fruit captured on a netted portable fruit catching frame. x
Table 2.
Fruit firmness and bruise damage ‘Draper’, ‘Legacy’ and ‘Liberty’ northern highbush blueberries harvested by hand into a pail and with a hand held semi-mechanical shaker and fruit captured on a netted portable fruit catching frame. x
| Cultivar | Harvest Method | Fruit Firmness (g/mm) | % Bruised Area |
|---|
| Draper | Hand | 220 b y | 3.0 a |
| Shaker | 239 a | 1.5 a |
| Legacy | Hand | 166 b | 8.0 a |
| Shaker | 178 b | 10.0 a |
| Liberty | Hand | 174 a | - z |
| Shaker | 152 b | - |
Table 3.
The main effects of operating pressures of the hand-held fruit shaker and fruit catch surface materials installed on the harvest-assist platform on impact bruise in ‘Draper’ blueberry harvested by semi-mechanical harvesting system to detach fruit and modified fruit collecting surfaces in 2016 in Oregon.
Table 3.
The main effects of operating pressures of the hand-held fruit shaker and fruit catch surface materials installed on the harvest-assist platform on impact bruise in ‘Draper’ blueberry harvested by semi-mechanical harvesting system to detach fruit and modified fruit collecting surfaces in 2016 in Oregon.
| Treatment | Mean Bruised Area (%) | Percent of Fruit with >10% Bruised x | Percent of Fruit with >20% Bruised x |
|---|
| Operating pressure (psi) | | | |
| 0 (hand harvest) | 0.5 c y | 0.0 c | 0.0 c |
| 50 | 2.0 b | 6.5 b | 1.0 c |
| 60 | 3.4 a | 13.5 a | 5.2 b |
| Catching surface material | | | |
| Hand harvest | 0.5 ns | 0.0 b | 0.0 ns |
| Foam pad | 2.6 | 9.5 b | 2.5 |
| Fabric net | 2.8 | 10.5 a | 3.8 |
| p > F-value | | | |
| Operating pressure | 0.006 | 0.005 | 0.004 |
| Catching surface material | 0.619 | 0.406 | 0.359 |
| Pressure × Material | 0.660 | 0.278 | 0.359 |
Table 4.
Determination of suitability of southern highbush blueberry cultivars (‘Chickadee’, ‘Flicker’, and ‘Springhigh’) for mechanical harvesting system consisting of hand-held shaker and harvest-assist platform. x
Table 4.
Determination of suitability of southern highbush blueberry cultivars (‘Chickadee’, ‘Flicker’, and ‘Springhigh’) for mechanical harvesting system consisting of hand-held shaker and harvest-assist platform. x
| Treatment | Average Bruise Rating (%) |
|---|
| Cultivar | |
| Chickadee | 4.3 a y |
| Flicker | 4.3 a |
| Springhigh | 6.7 b |
| Catching surface | |
| None/Hand harvest control | 2.2 a |
| Metal sheet | 9.0 c |
| Suspended foam pad | 3.7 b |
| Suspended woven fabric net | 4.1 c |
| Drop height | |
| 0 cm | 2.2 a |
| 60 cm | 4.9 b |
| 90 cm | 6.3 c |
| p > F-value | |
| CV | 0.0682 |
| Surface | <0.0001 |
| CV × Surface | 0.5065 |
| Height | 0.0002 |
| Height × Surface | <0.0001 |
| CV × Height | 0.3679 |
| CV × Surface × Height | 0.0019 |
Table 5.
The influence of catching surface on bruising of ‘Chickadee’ blueberries harvested with harvest aide in 2016.
Table 5.
The influence of catching surface on bruising of ‘Chickadee’ blueberries harvested with harvest aide in 2016.
| Catching Surface | Average Bruise Area (%) | % Berries ≥ 10% Bruised Area | % Berries ≥ 20% Bruised Area |
|---|
| Hand harvest | 1.2 a x | 2.7 a | 1.3 a |
| Metal sheet | 10.9 b | 41.3 b | 24.0 b |
| Foam sheet | 2.9 a | 8.0 a | 2.7 a |
| Net fabric | 2.8 a | 6.7 a | 4.0 a |
| p > F-value | | | |
| Surface | <0.0001 | 0.0085 | 0.0222 |
Table 6.
The influence of catching surface on bruising of ‘Flicker’ blueberries harvested with harvest aide in 2016.
Table 6.
The influence of catching surface on bruising of ‘Flicker’ blueberries harvested with harvest aide in 2016.
| Catching Surface | Average Bruise Area (%) | % Berries ≥ 10% Bruised Area | % Berries ≥ 20% Bruised Area |
|---|
| Hand harvest | 1.3 a x | 2.7 a | 0.0 a |
| Metal sheet | 17.5 c | 69.7 c | 33.3 c |
| Foam sheet | 5.5 b | 26.7 b | 9.3 b |
| Net fabric | 8.3 b | 30.7 b | 16.0 b |
| p > F-value | | | |
| Surface | <0.0001 | 0.0004 | 0.0018 |
Table 7.
The influence of catching surface on bruising of ‘Kestrel’ blueberries harvested with harvest aid in 2016.
Table 7.
The influence of catching surface on bruising of ‘Kestrel’ blueberries harvested with harvest aid in 2016.
| Catching Surface | Average Bruise Area (%) | % Berries ≥ 10% Bruised Area | % Berries ≥ 20% Bruised Area |
|---|
| Hand Harvest | 1.3 a x | 2.7 a | 1.3 a |
| Metal Sheet | 10.9 c | 52.0 c | 25.3 c |
| Foam sheet | 3.3 ab | 12.0 b | 6.7 b |
| Fabric net | 5.4 b | 17.3 b | 9.3 b |
| p > F-value | | | |
| Surface | <0.0001 | 0.0008 | 0.0042 |



 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}