
Integrating UAV-Based Multispectral Data and Transfer Learning for Soil Moisture Prediction in the Black Soil Region of Northeast China


Abstract
1. Introduction
2. Materials and Methods
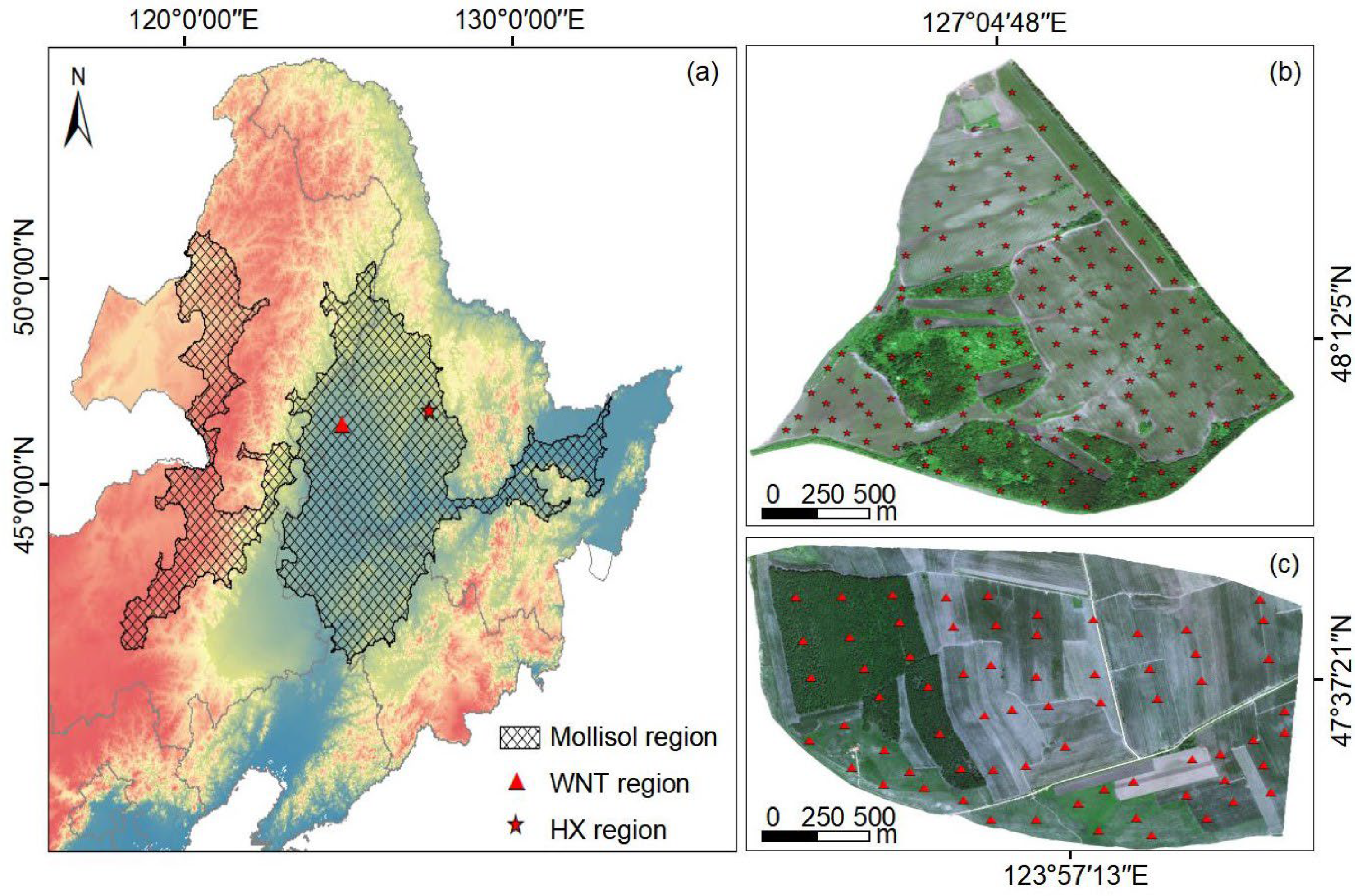
2.1. Study Area
2.2. Data Sources
2.2.1. UAV Multispectral Data
2.2.2. In Situ SM
2.3. Methods
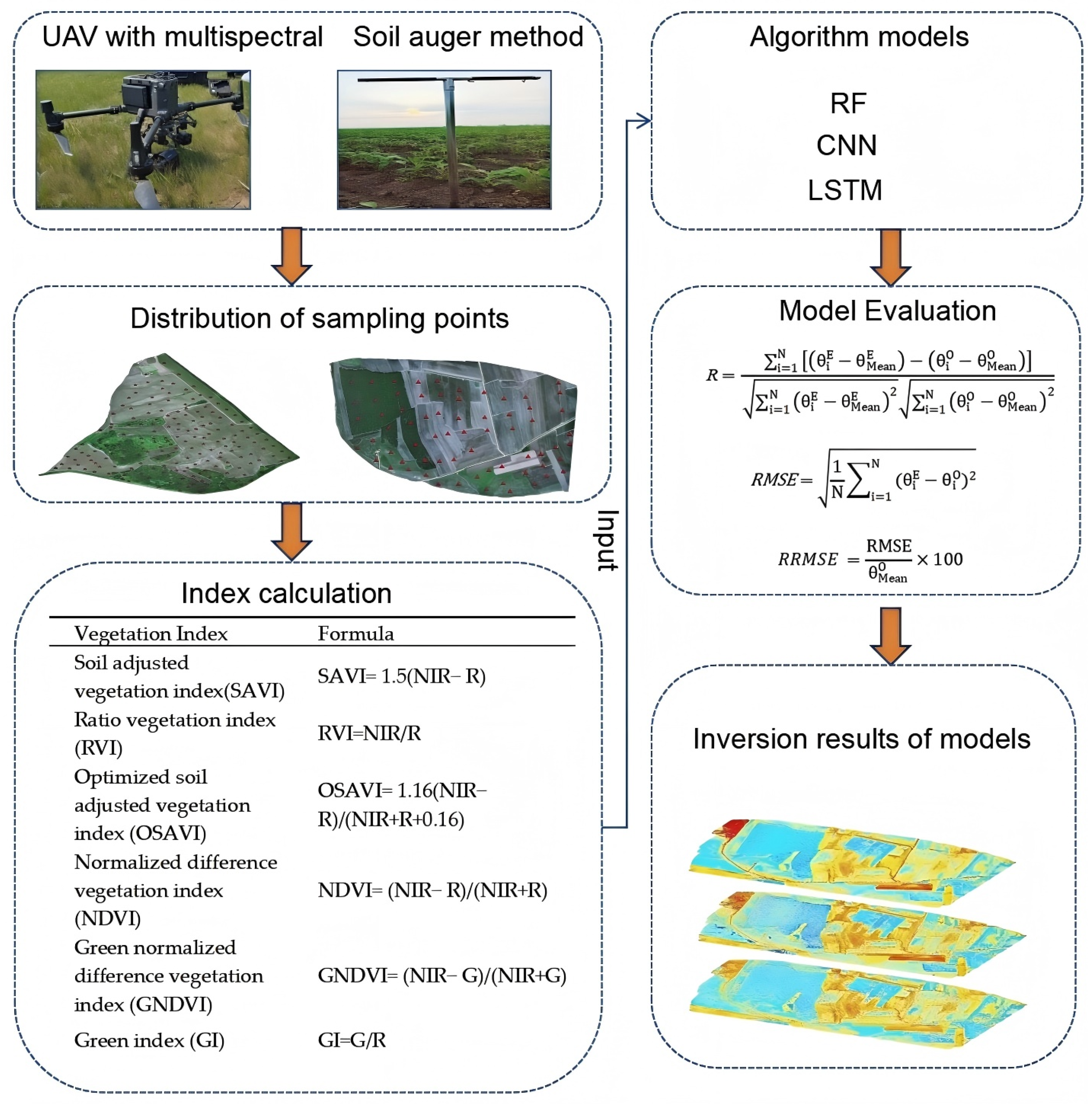
2.3.1. Calculation of Indices
2.3.2. Machine Learning and Deep Learning Methods
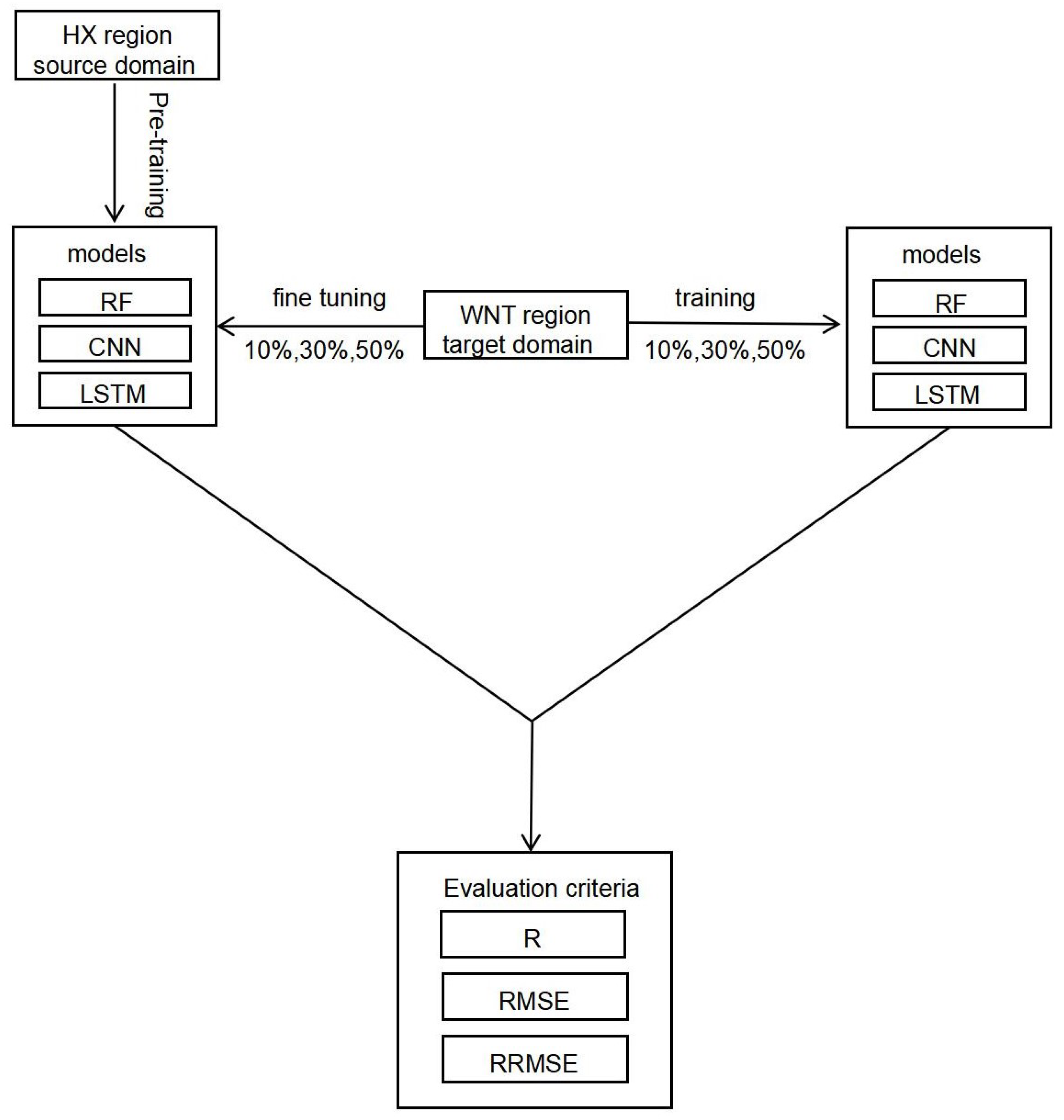
2.3.3. Transfer Learning Framework
2.3.4. Model Performance Evaluation
3. Results
3.1. The Predictive Performance of the Source Domain Model
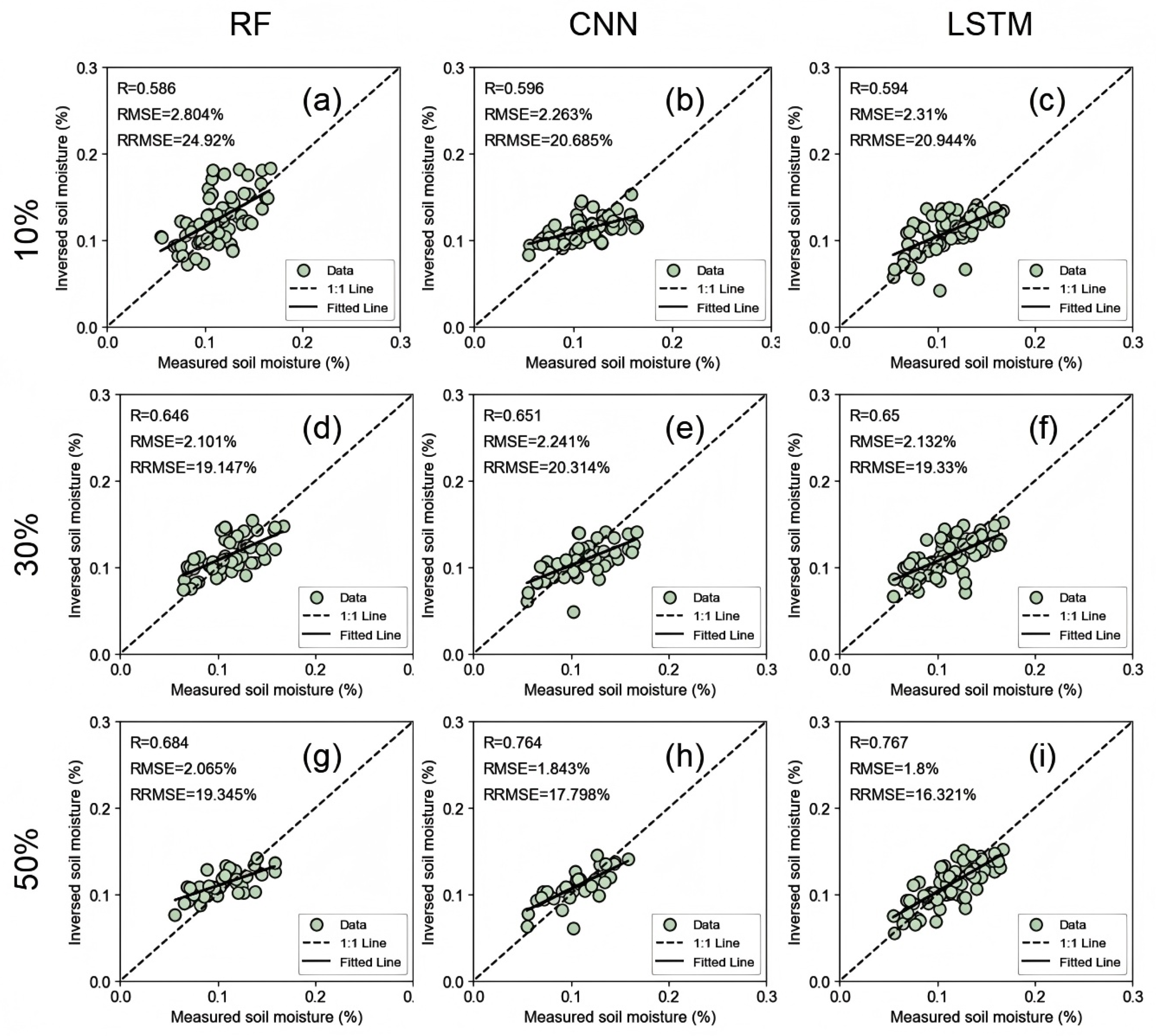
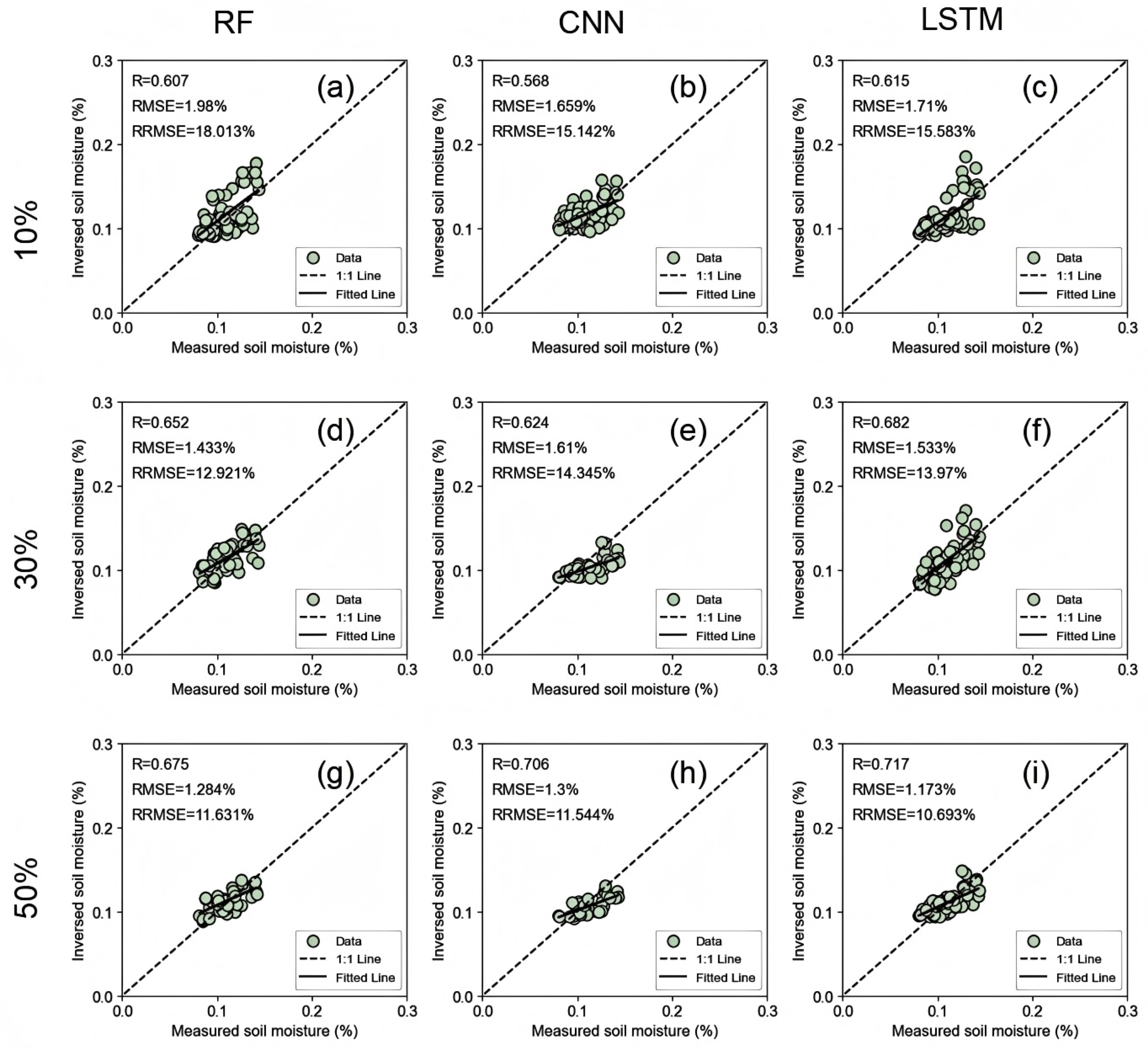
3.2. The Influence of Fine-Tuning Data with Different Proportions on the Performance of the Transfer Learning Framework
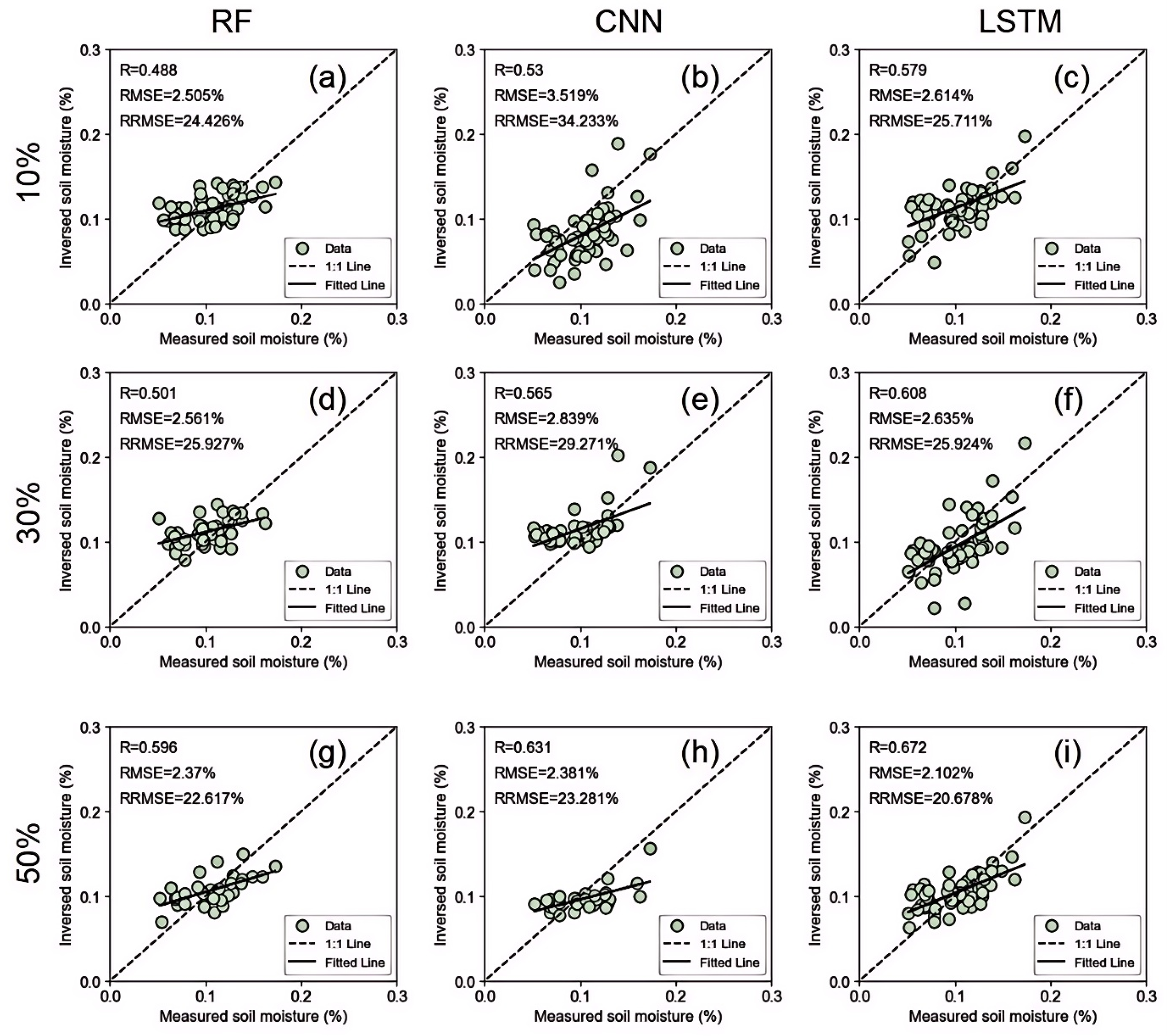
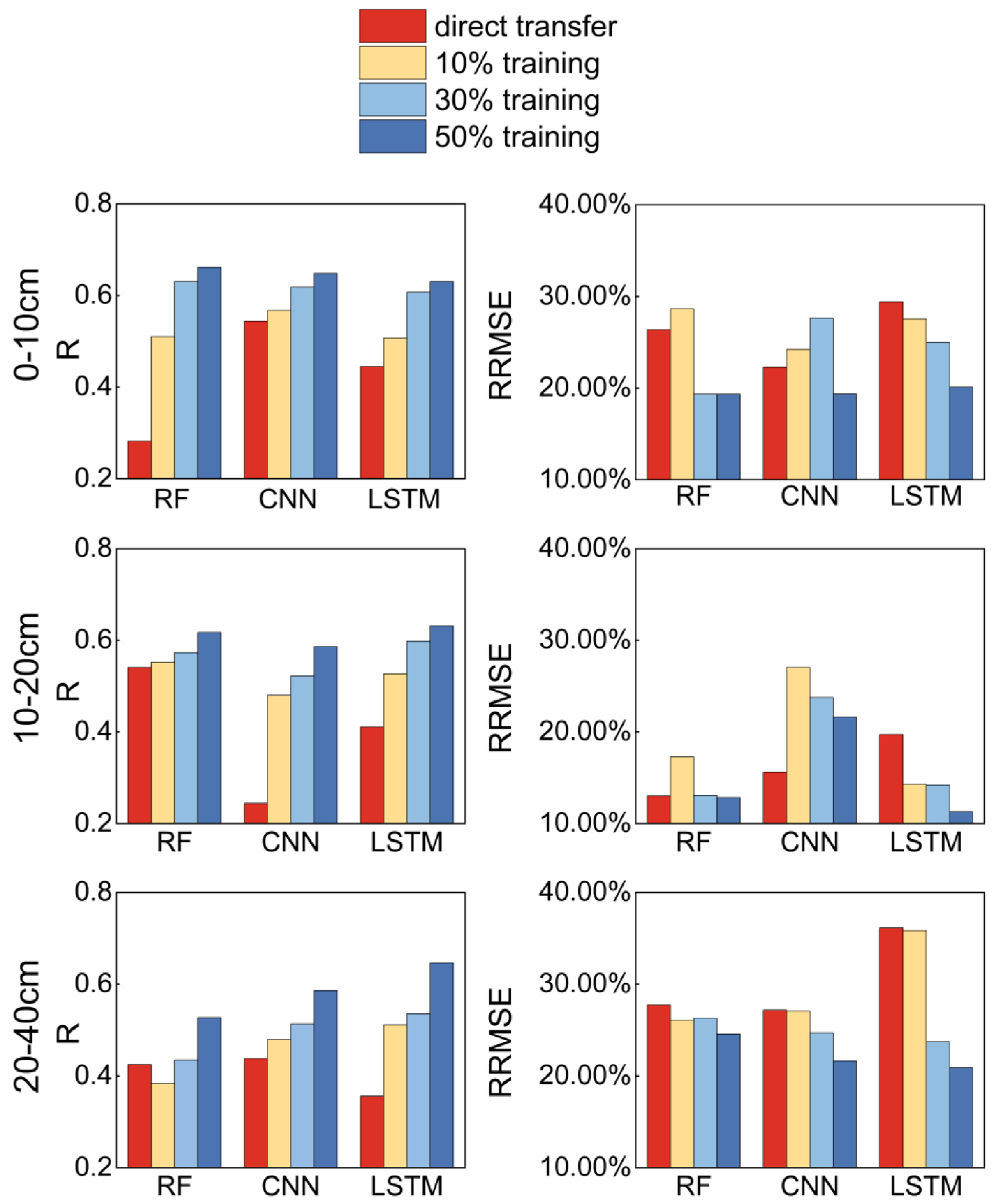
3.3. Comparison of Model Direct Transfer, Target Domain Training, and Transfer Learning Framework Performance
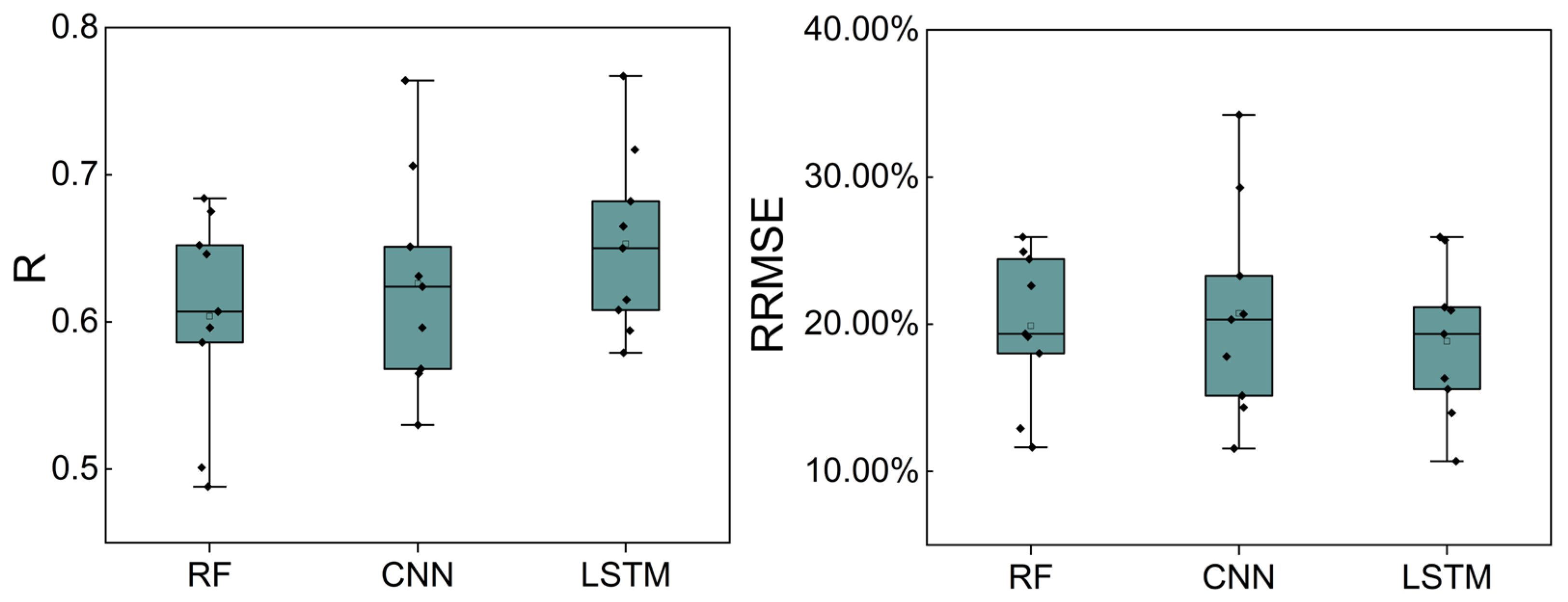
3.4. Overall Performance Comparison of RF, CNN, and LSTM Under the Framework of Transfer Learning
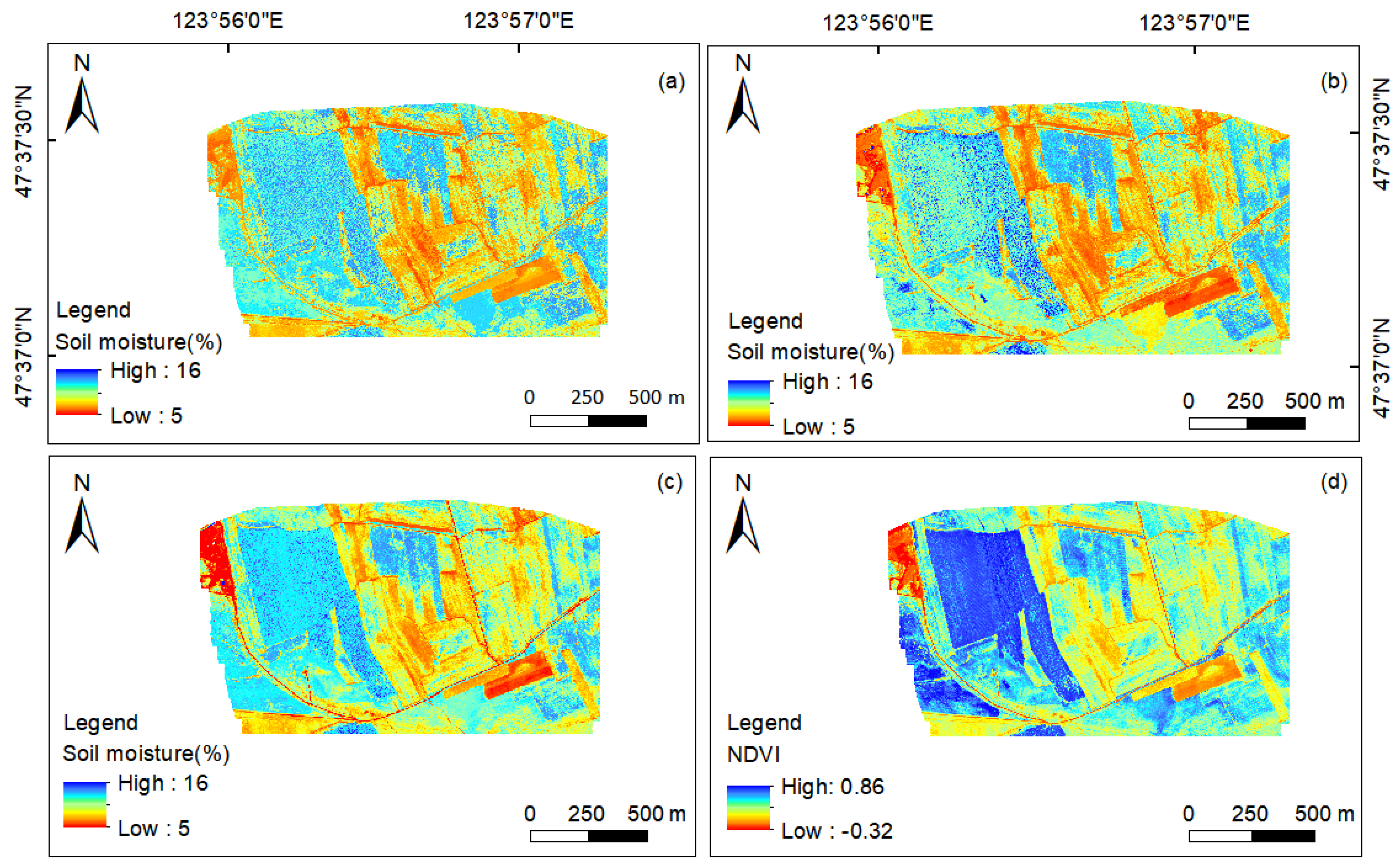
3.5. Analysis of Spatial Distribution of Study Area
4. Discussion
4.1. Comparison of Different Prediction Models and Limitations of Direct Transfer
4.2. The Advantages of Transfer Learning Frameworks in Few-Shot Transfer Learning
4.3. Analysis of the Applicability of Different Algorithm Models in Transfer Learning
4.4. Future Research Directions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Peng, J.; Albergel, C.; Balenzano, A.; Brocca, L.; Cartus, O.; Cosh, M.H.; Crow, W.T.; Dabrowska-Zielinska, K.; Dadson, S.; Davidson, M.W.J.; et al. A roadmap for high-resolution satellite soil moisture applications—Confronting product characteristics with user requirements. Remote Sens. Environ. 2021, 252, 112162. [Google Scholar] [CrossRef]
- Rahmani, A.; Golian, S.; Brocca, L. Multiyear monitoring of soil moisture over Iran through satellite and reanalysis soil moisture products. Int. J. Appl. Earth Obs. 2016, 48, 85–95. [Google Scholar] [CrossRef]
- Luo, W.; Xu, X.; Liu, W.; Liu, M.; Li, Z.; Peng, T.; Xu, C.; Zhang, Y.; Zhang, R. UAV based soil moisture remote sensing in a karst mountainous catchment. Catena 2019, 174, 478–489. [Google Scholar] [CrossRef]
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil moisture measurement for ecological and hydrological watershed-scale observatories: A review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef]
- Mukhlisin, M.; Astuti, H.W.; Wardihani, E.D.; Matlan, S.J. Techniques for ground-based soil moisture measurement: A detailed overview. Arab. J. Geosci. 2021, 14, 1–34. [Google Scholar] [CrossRef]
- Guo, J.; Bai, Q.; Guo, W.; Bu, Z.; Zhang, W. Soil moisture content estimation in winter wheat planting area for multi-source sensing data using CNNR. Comput. Electron. Agr. 2022, 193, 106670. [Google Scholar] [CrossRef]
- Zeng, L.; Hu, S.; Xiang, D.; Zhang, X.; Li, D.; Li, L.; Zhang, T. Multilayer soil moisture mapping at a regional scale from multisource data via a machine learning method. Remote Sens. 2019, 11, 284. [Google Scholar] [CrossRef]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital terrain modelling: A review of hydrological, geomorphological, and biological applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, W.; Wang, K.; Fu, W. Soil moisture dynamics under different land uses on karst hillslope in northwest Guangxi, China. Environ. Earth Sci. 2010, 61, 1105–1111. [Google Scholar] [CrossRef]
- Ma, K.M.; Fu, B.J.; Liu, S.L.; Guan, W.B.; Liu, G.H.; Lü, Y.H.; Anand, M. Multiple-scale soil moisture distribution and its implications for ecosystem restoration in an arid river valley, China. Land Degrad. Dev. 2004, 15, 75–85. [Google Scholar] [CrossRef]
- Peng, J.; Tanguy, M.; Robinson, E.L.; Pinnington, E.; Evans, J.; Ellis, R.; Cooper, E.; Hannaford, J.; Blyth, E.; Dadson, S. Estimation and evaluation of high-resolution soil moisture from merged model and Earth observation data in the Great Britain. Remote Sens. Environ. 2021, 264, 112610. [Google Scholar] [CrossRef]
- Hill, D.J.; Tarasoff, C.; Whitworth, G.E.; Baron, J.; Bradshaw, J.L.; Church, J.S. Utility of unmanned aerial vehicles for mapping invasive plant species: A case study on yellow flag iris (Iris pseudacorus L.). Int. J. Remote. Sens. 2017, 38, 2083–2105. [Google Scholar] [CrossRef]
- Cheng, M.; Li, B.; Jiao, X.; Huang, X.; Fan, H.; Lin, R.; Liu, K. Using multimodal remote sensing data to estimate regional-scale soil moisture content: A case study of Beijing, China. Agr. Water Manag. 2022, 260, 107298. [Google Scholar] [CrossRef]
- Seo, M.; Shin, H.; Tsourdos, A. Soil moisture retrieval model design with multispectral and infrared images from unmanned aerial vehicles using convolutional neural network. Agronomy 2021, 11, 398. [Google Scholar] [CrossRef]
- Holloway, J.; Mengersen, K. Statistical Machine Learning Methods and Remote Sensing for Sustainable Development Goals: A Review. Remote Sens. 2018, 10, 1365. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 111599. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, H.; Dai, Q.; Wang, Y.; Hu, X. Estimation of Soil Moisture during Different Growth Stages of Summer Maize under Various Water Conditions Using UAV Multispectral Data and Machine Learning. Agronomy 2024, 14, 2008. [Google Scholar] [CrossRef]
- Zhang, Y.; Han, W.; Zhang, H.; Niu, X.; Shao, G. Evaluating soil moisture content under maize coverage using UAV multimodal data by machine learning algorithms. J. Hydrol. 2023, 617, 129086. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comprehensive review and list of resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef]
- Hegazi, E.H.; Yang, L.; Huang, J. A convolutional neural network algorithm for soil moisture prediction from Sentinel-1 SAR images. Remote Sens. 2021, 13, 4964. [Google Scholar] [CrossRef]
- Ahmed, A.M.; Deo, R.C.; Ghahramani, A.; Raj, N.; Feng, Q.; Yin, Z.; Yang, L. LSTM integrated with Boruta-random forest optimiser for soil moisture estimation under RCP4. 5 and RCP8. 5 global warming scenarios. Stoch. Environ. Res. Risk Assess. 2021, 35, 1851–1881. [Google Scholar] [CrossRef]
- Fu, B.; Wang, J.; Chen, L.; Qiu, Y. The effects of land use on soil moisture variation in the Danangou catchment of the Loess Plateau, China. Catena 2003, 54, 197–213. [Google Scholar] [CrossRef]
- Xu, G.; Huang, M.; Li, P.; Li, Z.; Wang, Y. Effects of land use on spatial and temporal distribution of soil moisture within profiles. Environ. Earth Sci. 2021, 80, 128. [Google Scholar] [CrossRef]
- Bulut, B.; Yilmaz, M.T.; Afshar, M.H.; Şorman, A.Ü.; Yücel, İ.; Cosh, M.H.; Şimşek, O. Evaluation of remotely-sensed and model-based soil moisture products according to different soil type, vegetation cover and climate regime using station-based observations over Turkey. Remote Sens. 2019, 11, 1875. [Google Scholar] [CrossRef]
- Koster, R.D.; Guo, Z.; Yang, R.; Dirmeyer, P.A.; Mitchell, K.; Puma, M.J. On the nature of soil moisture in land surface models. J. Clim. 2009, 22, 4322–4335. [Google Scholar] [CrossRef]
- Kornelsen, K.C.; Coulibaly, P. Root-zone soil moisture estimation using data-driven methods. Water Resour. Res. 2014, 50, 2946–2962. [Google Scholar] [CrossRef]
- Dekker, A.G.; Peters, S.; Vos, R.; Rijkeboer, M. Remote sensing for inland water quality detection and monitoring: State-of-the-art application in Friesland waters. In GIS and Remote Sensing Techniques in Land-and Water-Management; Springer: Dordrecht, The Netherlands, 2001; pp. 17–38. [Google Scholar]
- Wikle, C.K. A kernel-based spectral model for non-Gaussian spatio-temporal processes. Stat. Model. 2002, 2, 299–314. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Weiss, K.; Khoshgoftaar, T.M.; Wang, D. A survey of transfer learning. J. Big Data 2016, 3, 9. [Google Scholar] [CrossRef]
- Pires De Lima, R.; Marfurt, K. Convolutional neural network for remote-sensing scene classification: Transfer learning analysis. Remote Sens. 2019, 12, 86. [Google Scholar] [CrossRef]
- Li, J.; Xiao, Z.; Sun, R.; Song, J. Retrieval of the leaf area index from visible infrared imaging radiometer suite (VIIRS) surface reflectance based on unsupervised domain adaptation. Remote Sens. 2022, 14, 1826. [Google Scholar] [CrossRef]
- Liu, L.; Ji, M.; Buchroithner, M. Transfer learning for soil spectroscopy based on convolutional neural networks and its application in soil clay content mapping using hyperspectral imagery. Sensors 2018, 18, 3169. [Google Scholar] [CrossRef] [PubMed]
- Wang, A.X.; Tran, C.; Desai, N.; Lobell, D.; Ermon, S. in Deep transfer learning for crop yield prediction with remote sensing data. In Proceedings of the 1st ACM SIGCAS Conference on Computing and Sustainable Societies, Menlo Park, CA, USA, 20–22 June 2018; Association for Computing Machiner: New York, NY, USA, 2018; pp. 1–5. [Google Scholar]
- Pu, F.; Ding, C.; Chao, Z.; Yu, Y.; Xu, X. Water-quality classification of inland lakes using landsat8 images by convolutional neural networks. Remote Sens. 2019, 11, 1674. [Google Scholar] [CrossRef]
- FAO (Food and Agriculture Organization of the United Nations). World Reference Base for Soil Resources 2014. In International Soil Classification System for Naming Soils and Creating Legends for Soil Maps; World Soil Res ources Reports 106; FAO: Rome, Italy, 2015. [Google Scholar]
- Liu, B.; Wen, Y.; Lin, L.; Wen, X.; Gao, R.; Zhang, B.; Li, T.; Yao, S. Variations in soil quality indicators under different cultivation ages and slope positions of arable land in the Mollisol region of China. Catena 2024, 246, 108418. [Google Scholar] [CrossRef]
- Wen, Y.; Liu, B.; Lin, L.; Hu, M.; Wen, X.; Li, T.; Rong, J.; Yao, S. Shelterbelt effects on soil redistribution on an arable slope by wind and water. Catena 2024, 241, 108044. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Mishra, S.; Mishra, D.R. Normalized difference chlorophyll index: A novel model for remote estimation of chlorophyll-a concentration in turbid productive waters. Remote Sens. Environ. 2012, 117, 394–406. [Google Scholar]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Wang, F.; Huang, J.; Tang, Y.; Wang, X. New vegetation index and its application in estimating leaf area index of rice. Rice Sci. 2007, 14, 195–203. [Google Scholar]
- Zarco-Tejada, P.J.; Berjón, A.; Lopez-Lozano, R.; Miller, J.R.; Martín, P.; Cachorro, V.; González, M.R.; De Frutos, A. Assessing vineyard condition with hyperspectral indices: Leaf and canopy reflectance simulation in a row-structured discontinuous canopy. Remote Sens. Environ. 2005, 99, 271–287. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Mathieu, R.; Pouget, M.; Cervelle, B.; Escadafal, R. Relationships between satellite-based radiometric indices simulated using laboratory reflectance data and typic soil color of an arid environment. Remote Sens. Environ. 1998, 66, 17–28. [Google Scholar]
- Escadafal, R. Remote sensing of arid soil surface color with Landsat thematic mapper. Adv. Space Res. 1989, 9, 159–163. [Google Scholar]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar]
- Svetnik, V.; Liaw, A.; Tong, C.; Culberson, J.C.; Sheridan, R.P.; Feuston, B.P. Random forest: A classification and regression tool for compound classification and QSAR modeling. J. Chem. Inf. Comput. Sci. 2003, 43, 1947–1958. [Google Scholar] [CrossRef]
- LeCun, Y.; Boser, B.; Denker, J.; Henderson, D.; Howard, R.; Hubbard, W.; Jackel, L. Handwritten digit recognition with a back-propagation network. Adv. Neural Inf. Process. Syst. 1989, 2. [Google Scholar]
- Wang, N.; Chen, F.; Yu, B.; Qin, Y. Segmentation of large-scale remotely sensed images on a Spark platform: A strategy for handling massive image tiles with the MapReduce model. ISPRS J. Photogramm. 2020, 162, 137–147. [Google Scholar] [CrossRef]
- Hochreiter, S. Long Short-term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar]
- Fang, K.; Shen, C. Near-real-time forecast of satellite-based soil moisture using long short-term memory with an adaptive data integration kernel. J. Hydrometeorol. 2020, 21, 399–413. [Google Scholar]
- Ghazi, M.M.; Yanikoglu, B.; Aptoula, E. Plant identification using deep neural networks via optimization of transfer learning parameters. Neurocomputing 2017, 235, 228–235. [Google Scholar]
- Li, S.; Han, Y.; Li, C.; Wang, J. A novel framework for multi-layer soil moisture estimation with high spatio-temporal resolution based on data fusion and automated machine learning. Agr. Water Manag. 2024, 306, 109173. [Google Scholar]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. 2016, 114, 24–31. [Google Scholar]
- Cheng, M.; Jiao, X.; Liu, Y.; Shao, M.; Yu, X.; Bai, Y.; Wang, Z.; Wang, S.; Tuohuti, N.; Liu, S. Estimation of soil moisture content under high maize canopy coverage from UAV multimodal data and machine learning. Agr. Water Manag. 2022, 264, 107530. [Google Scholar]
- Skobalski, J.; Sagan, V.; Alifu, H.; Al Akkad, O.; Lopes, F.A.; Grignola, F. Bridging the gap between crop breeding and GeoAI: Soybean yield prediction from multispectral UAV images with transfer learning. ISPRS J. Photogramm. 2024, 210, 260–281. [Google Scholar]
- Li, Q.; Wang, Z.; Shangguan, W.; Li, L.; Yao, Y.; Yu, F. Improved daily SMAP satellite soil moisture prediction over China using deep learning model with transfer learning. J. Hydrol. 2021, 600, 126698. [Google Scholar]
- Teshome, F.T.; Bayabil, H.K.; Schaffer, B.; Ampatzidis, Y.; Hoogenboom, G. Improving soil moisture prediction with deep learning and machine learning models. Comput. Electron. Agr. 2024, 226, 109414. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, S.; Ermon, S.; Lobell, D.B. Transfer learning in environmental remote sensing. Remote Sens. Environ. 2024, 301, 113924. [Google Scholar] [CrossRef]
- Michau, G.; Fink, O. Unsupervised transfer learning for anomaly detection: Application to complementary operating condition transfer. Knowl.-Based Syst. 2021, 216, 106816. [Google Scholar]
- Ma, Y.; Zhang, Z.; Yang, H.L.; Yang, Z. An adaptive adversarial domain adaptation approach for corn yield prediction. Comput. Electron. Agr. 2021, 187, 106314. [Google Scholar] [CrossRef]
- Gao, Y.; Ruan, Y.; Fang, C.; Yin, S. Deep learning and transfer learning models of energy consumption forecasting for a building with poor information data. Energ. Build. 2020, 223, 110156. [Google Scholar] [CrossRef]
- Simonyan, K. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Zhu, L.; Dai, J.; Liu, Y.; Yuan, S.; Qin, T.; Walker, J.P. A cross-resolution transfer learning approach for soil moisture retrieval from Sentinel-1 using limited training samples. Remote Sens. Environ. 2024, 301, 113944. [Google Scholar] [CrossRef]
- Yang, J.; Yang, Q.; Hu, F.; Shao, J.; Wang, G. A climate-adaptive transfer learning framework for improving soil moisture estimation in the Qinghai-Tibet Plateau. J. Hydrol. 2024, 630, 130717. [Google Scholar] [CrossRef]
- Sudhakara, B.; Bhattacharjee, S. Prediction of High-Resolution Soil Moisture Using Multi-source Data and Machine Learning. In International Conference on Distributed Computing and Intelligent Technology; Springer: Cham, Switzerland, 2024; pp. 282–292. [Google Scholar]
- Tóth, G.; Jones, A.; Montanarella, L. The LUCAS topsoil database and derived information on the regional variability of cropland topsoil properties in the European Union. Environ. Monit. Assess. 2013, 185, 7409–7425. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Clay Fraction (%) | Particle Size Range (%) | Sand Particle Range (%) | Elevation Range (m) |
|---|---|---|---|---|
| Hongxing region | 8.82–15.64 | 50.74–63.14 | 21.22–40.44 | 281–325 |
| Woniutu region | 1.38–6.66 | 7.8–61.83 | 32.99–89.68 | 153–158 |
| Index | Formula | References |
|---|---|---|
| Soil adjusted vegetation index (SAVI) | SAVI = 1.5(NIR − R) | [40] |
| Ratio vegetation index (RVI) | RVI = NIR/R | [41] |
| Optimized soil adjusted vegetation index (OSAVI) | OSAVI = 1.16(NIR − R)/(NIR + R + 0.16) | [42] |
| Normalized difference vegetation index (NDVI) | NDVI = (NIR − R)/(NIR + R) | [43] |
| Green normalized difference vegetation index (GNDVI) | GNDVI = (NIR − G)/(NIR + G) | [44] |
| Green index (GI) | GI = G/R | [45] |
| Enhanced vegetation index (EVI) | EVI = 2.5(NIR − R)/(NIR + 6R − 7.5B + 1) | [46] |
| Redness index (RI) | RI = R × R/(G × G × G) | [47] |
| Color index (CI) | CI = (R − G)/(R + G) | [47] |
| Brightness index (BI) | BI = (R2 + G2)0.5/2 | [48] |
| Modified chlorophyll absorption in reflectance index (MCARI) | MCARI = [(RE − R) − 0.2(RE − G)](RE/R) | [49] |
| Transformed chlorophyll absorption in reflectance index (TCARI) | TCARI = 3[(RE − R) − 0.2(RE − G)(RE/R)] | [49] |
| Dataset Name | Region | Total Samples | Each Soil Depth Layer Samples | Training Set Size/Testing Set Size | UAV Data |
|---|---|---|---|---|---|
| Source Domain (HX) | HX Region | 519 | 173 | 7:3 | Collected in the HX region. |
| Target Domain (WNT) | WNT Region | 210 | 70 | 1:9 3:7 5:5 | Collected in the WNT region. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, T.; Ma, S.; Liu, T.; Yao, S.; Li, S.; Gao, Y. Integrating UAV-Based Multispectral Data and Transfer Learning for Soil Moisture Prediction in the Black Soil Region of Northeast China. Agronomy 2025, 15, 759. https://doi.org/10.3390/agronomy15030759
Zhou T, Ma S, Liu T, Yao S, Li S, Gao Y. Integrating UAV-Based Multispectral Data and Transfer Learning for Soil Moisture Prediction in the Black Soil Region of Northeast China. Agronomy. 2025; 15(3):759. https://doi.org/10.3390/agronomy15030759
Chicago/Turabian StyleZhou, Tong, Shoutian Ma, Tianyu Liu, Shuihong Yao, Shenglin Li, and Yang Gao. 2025. "Integrating UAV-Based Multispectral Data and Transfer Learning for Soil Moisture Prediction in the Black Soil Region of Northeast China" Agronomy 15, no. 3: 759. https://doi.org/10.3390/agronomy15030759
APA StyleZhou, T., Ma, S., Liu, T., Yao, S., Li, S., & Gao, Y. (2025). Integrating UAV-Based Multispectral Data and Transfer Learning for Soil Moisture Prediction in the Black Soil Region of Northeast China. Agronomy, 15(3), 759. https://doi.org/10.3390/agronomy15030759