
Using AI to Empower Norwegian Agriculture: Attention-Based Multiple-Instance Learning Implementation


Abstract
1. Introduction
1.1. Problem Statement and Hypotheses
1.2. Research Challenges and Contributions
- Early and seasonal grain yield prediction: This research identified a pressing need for advanced in-season yield forecasting methodologies, prompting a comparative study of early prediction techniques. Employing a CNN-LSTM architecture, Sharma et al. [4] achieved minimal training and validation losses. Following Engen et al., who introduced a hybrid deep neural network that integrated various agricultural data sources, yielding a mean absolute error of 76 kg per 1000 m2 and recorded error rate increases from weeks 10 to 26 and 10 to 21, respectively, this study seeks to construct an accurate early-season yield prediction framework for diverse cereal types.
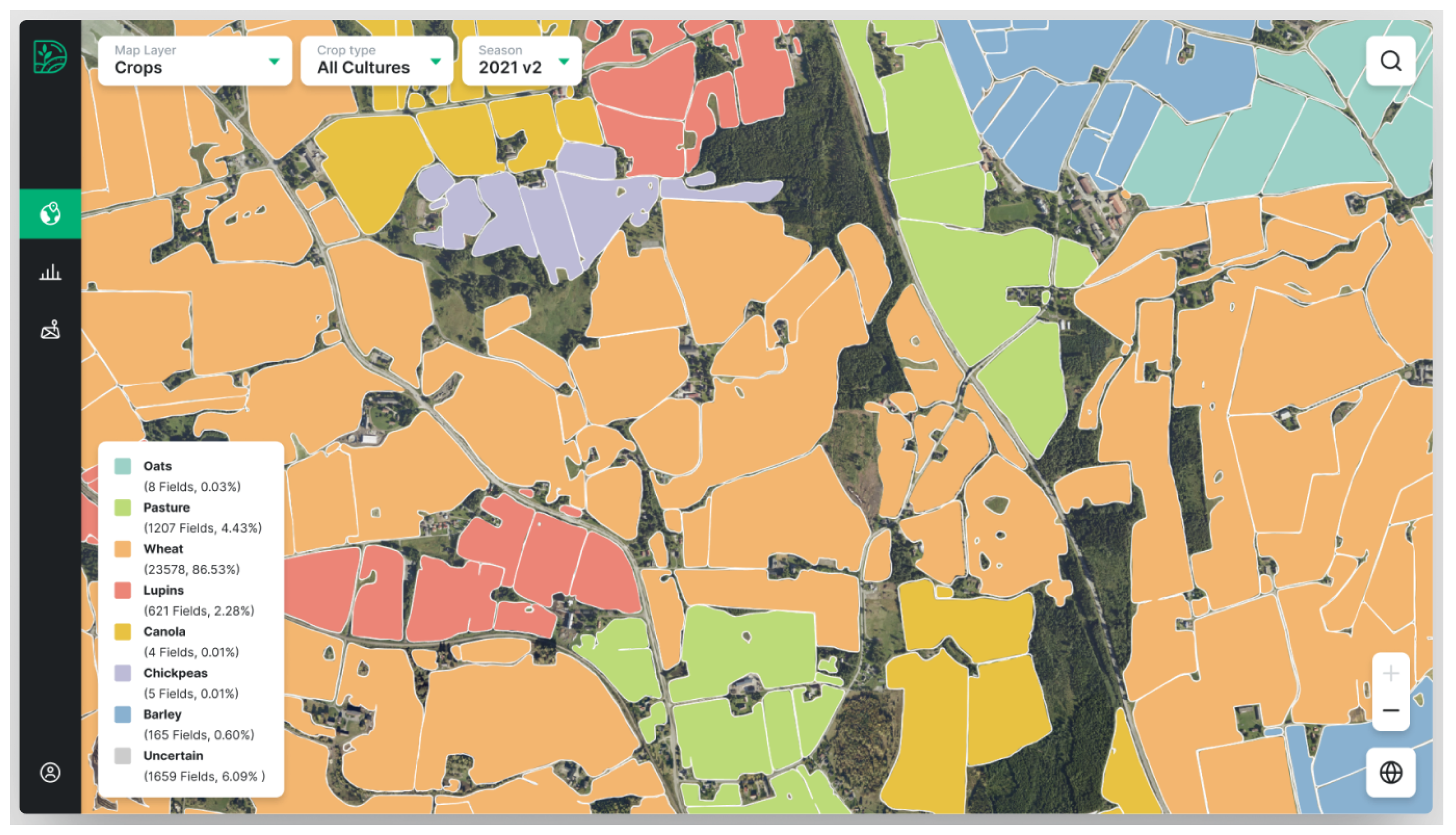
- Crop type delineation and mapping: Addressing the scarcity of agriculture-specific data in Norway, Kussul et al. [12] advanced a field classification framework, demonstrating high accuracy rates for both 1D and 2D models, particularly the latter, which interprets spatial context in satellite imagery or vegetation indices. Their progress in winter wheat classification underscores the value of phenological data in remote sensing of wheat grains. Additionally, DigiFarm’s (https://digifarm.io/, (accessed on 13 April 2024)) technology, which achieves a 92% accuracy rate in delineating field boundaries and identifying crop types via satellite imagery in specific locales, is notably pertinent to this research.
- Employing vegetation indices for crop categorisation: Remote sensing techniques, which analyse the spectral composition of Earth’s surface, elucidate land, water, and vegetation features. Vegetation indices, derived from multiple spectral bands, convert reflective data into metrics that elucidate vegetation characteristics and terrestrial changes. These indices, essential in remote sensing analyses, necessitate careful selection to suit specific objectives in varied environments, especially in grain type differentiation, where variations are more nuanced [15]. This study utilises a suite of ten vegetation indices, thoughtfully chosen to optimise accuracy in cereal type categorisation.
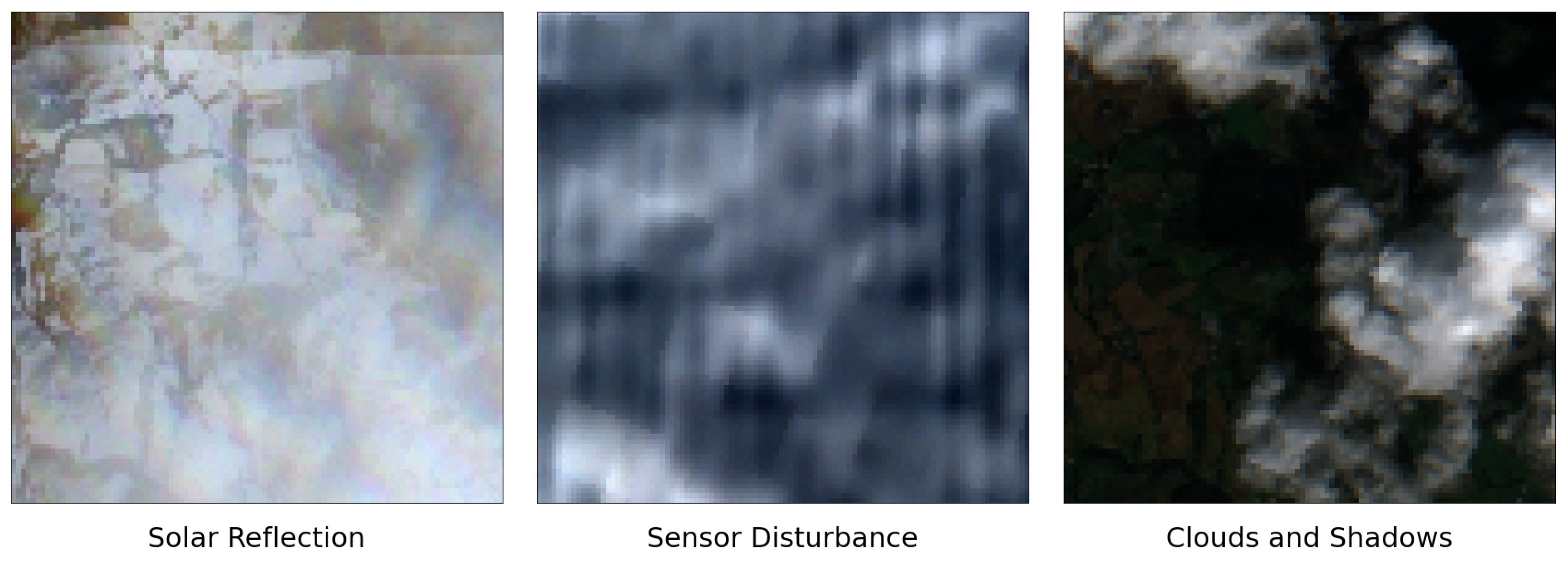
- Mitigation of cloud-induced noise in satellite imagery: The investigation acknowledges the potential of a two-step robust principal component analysis (RPCA) methodology, as outlined by Wen et al. [16], for cloud detection and mitigation in satellite images. Examples of these types of noise are visualised in Figure 1, which shows four types of noise in satellite images, solar reflection, sensor disturbance, cloud coverage, and presence of shadows, all identified at the same farm in the same year. This provides some insight into noise frequency, which can be problematic when extracting information and features from satellite images and generally results in a noisy dataset lacking essential information. Anticipating the building of such a framework to enhance analysis accuracy through noise reduction will be a focus of future work.
2. Material and Methods
2.1. Norwegian Agriculture and AI Advancements
2.1.1. Growth Factors and Farming Activities in Norwegian Agriculture
- Status of norwegian agriculture: Norwegian agriculture demonstrates a significant reliance on the geographic positioning of farms. Contiguous regions conducive to field cultivation are primarily found along the coastline and within the Innlandet region, characterised by relatively flat terrain compared to other areas. Notably, grain production is concentrated predominantly in the low-lying areas of southern Norway, such as Innlandet. Nonetheless, a considerable portion of agriculturally viable land is designated for farming and grass production, benefiting from more favourable geographic and climatic conditions. Barley constitutes approximately half of the total grain output, with wheat and oats contributing roughly a quarter each [9]. Field preparation and sowing activities typically occur between April and May in Norway, contingent upon the duration and severity of the preceding winter and spring seasons. Spring-sown crops typically reach maturity by September, marking the commencement of the harvesting period. However, the harvest timing is subject to variables such as the sowing schedule and various temporal factors affecting the growth cycle. Autumn-sown grains are typically planted between August and September in Norway; however, these grains are beyond the scope of the present research endeavour [19].
- Meteorological factors: Optimal spring farming conditions necessitate minimal precipitation and sufficiently warm temperatures to facilitate ground thawing, enabling the use of heavy equipment for field operations such as ploughing and sowing. Dry soil conditions enhance manageability during these activities. Ideal lighting conditions for seed germination involve fluorescent cool white lights, as incandescent lights may generate excessive heat harmful to crops. Grain seeds and plants require stable temperatures and regular precipitation throughout the growing season to develop into harvestable grains. At maturity, grain plants must undergo drying to reduce moisture content for safe harvesting and storage [19,20].Temperature and precipitation profoundly influence farming operations and plant growth. Research by Johnson et al. (2014) [21] highlights the significant correlation between weather variables and crop yield, with a consensus favouring a favourable combination of warmth and rainfall for increased yields. Sunlight, crucial for photosynthesis and photomorphogenesis, benefits grain crops, with prolonged exposure often moderating temperature extremes. However, excessively high temperatures exceeding 30 °C, notably surpassing 45 °C, can stress or even kill most plant species [22]. Kukal and Irmak (2018) [23] emphasise the substantial impact of climate variability on crop yields, with precipitation emerging as a critical predictor across maize, sorghum, and soybean crops. These insights underscore the vital importance of temperature and precipitation in shaping crop growth and yield outcomes, informing effective yield prediction models.
- Agriculture field and soil factors: Soil texture and quality influence plant growth by dictating nutrient and water retention, water flow dynamics, and soil stability against disruptive forces. Factors such as animal activity, mechanical fieldwork, organic matter depletion, and cultivation practices can adversely impact soil properties, affecting water and oxygen capacity and promoting evaporation, thereby influencing seed and plant viability. Yield correlations are often observed with soil susceptibility to erosion by water and wind. Organic matter stabilises soil structure, enhances nutrient retention, and fosters microbial activity. Soil moisture content, accounting for up to 50% of yield variability, impacts soil temperature and nutrient uptake. Addressing soil factors such as water availability and organic matter content through fertilisation and irrigation can enhance plant productivity [18]. Field elevation and slope variations can also impact crop yields indirectly. Higher-altitude fields tend to be shallower with coarser textures, potentially impeding plant growth. Conversely, lower-altitude fields may experience colder air, hindering water accumulation and movement through the soil [18]. Foerster et al. [14] conducted crop classification and mapping, observing high temporal variability in the seasonal Normalised Difference Vegetation Index (NDVI), attributed to crop dependence on specific soil properties and water availability. These findings underscore the significance of soil characteristics in influencing crop growth and suggest that incorporating such information can refine crop classification and yield prediction models, enhancing agricultural decision-making processes.
- Farming activities: Various farming practices, such as fertilisation, irrigation, and field preparation techniques, significantly influence crop growth and yield outcomes. Farmers often utilise fertilisers and irrigation to enhance soil nutrient content and moisture levels, creating favourable conditions for plant growth. Irrigation, in particular, is crucial in mitigating the adverse effects of high temperatures and low precipitation, contributing to more stable yields amid climate variability. Additionally, organic farming practices prioritise sustainability over yield, employing natural fertilisers and crop rotation strategies to maintain soil fertility and ecosystem health. Field preparation activities, including ploughing, cultivation, and sowing, also impact crop performance by facilitating optimal seed placement and germination conditions. Studies such as that by Shah et al. [24] underscore the significance of factors like sowing date in determining yield outcomes, albeit within specific regional contexts. In summary, accounting for a comprehensive range of farming activities in yield prediction datasets is essential for accurately assessing crop growth and productivity.
2.1.2. Remote Sensing in Norwegian Agriculture
- Mitigation of cloud-induced noise in satellite imagery: Data acquired through remote sensing systems are vulnerable to various sources of noise, encompassing factors such as sensor orientation, atmospheric fluctuations, and phenomena such as cloud cover. Consequently, satellite imagery often contains contaminants like noise, clouds, and dead pixels, posing challenges to data integrity [12,29]. Reflective information captured by sensors can undergo distortion due to atmospheric influences, such as water droplets leading to cloud formation or optical impediments causing shadows, exacerbating the issue [30]. These artefacts significantly disrupt the usability of remote sensing data, necessitating pre-processing techniques to enhance their quality [31]. Kussul et al. [12] addressed noise and reflection issues in satellite images for land classification by employing a method involving masking out noisy regions and utilising self-organising Kohonen maps to restore missing pixel values in specific spectral bands [32]. Rooted in machine learning algorithms, this approach demonstrated potential for improving yield predictions and grain classifications in agricultural research contexts.Moreover, various information reconstruction methods have been devised for remote sensing images [29]. Zhang et al. [33] proposed a deep learning framework employing spatial–temporal patching to address thin and thick cloudy areas and shadows in Sentinel and Landsat images. Lin et al. [34] adopted an alternative strategy, utilising information cloning to replace cloudy regions with temporally correlated cloud-free areas from remote sensing imagery, assuming minimal land cover change over short periods. Additionally, Zhang et al. [35] developed a novel approach for reconstructing missing information in remote sensing features using a deep convolutional neural network (CNN) combined with spatial–temporal–spectral information. This framework showed promising results in mitigating cloud and noise issues, offering a feasible solution for enhancing the quality of satellite images pertinent to agricultural applications. However, applying such methodologies to satellite imagery of Norwegian farms necessitates access to suitable datasets comprising both cloudy and cloud-free spatial–temporal data, entailing substantial time investment for dataset preparation.
- Derived vegetation indices: Remote sensing systems excel in capturing and interpreting the spectral composition of radiation emitted from the Earth’s surface, facilitating insights into land, water bodies, and various vegetation features. Vegetation indices, derived from multiple remote sensing spectral bands, serve as straightforward transformations aimed at condensing reflective information into more interpretable metrics, thereby enhancing understanding of vegetation properties and terrestrial dynamics [36,37]. The origins of vegetation indices trace back to 1972, with Pearson and Miller pioneering the creation of the first two indices to discern contrasts between vegetation and ground surfaces [38]. Subsequently, over 519 unique vegetation indices have been developed, tailored to diverse purposes, applications, and environmental contexts [26]. However, not all vegetation indices are universally applicable, as demonstrated by studies indicating limitations of widely used indices like the Normalised Difference Vegetation Index (NDVI) and Enhanced Vegetation Index (EVI) in specific scenarios [39,40]. Accordingly, selecting suitable vegetation indices for particular research objectives and environmental conditions is imperative, particularly in contexts such as crop type classification, where nuances among grain types pose challenges [15].Fundamental studies, exemplified by Massey et al. [41], have underscored the utility of vegetation indices, notably NDVI, in crop mapping and classification endeavours. Leveraging decision tree algorithms and time-series NDVI data extracted from satellite images, Massey et al. achieved notable accuracy in crop type classification, demonstrating the efficacy of NDVI despite challenges stemming from similarities among target crop types. Ten vegetation indices were meticulously selected in this research based on theoretical foundations, practical applications, and extant literature. These indices are elucidated alongside their respective theories, applications, and formulae, sourced from Kobayashi et al. [42], Henrich et al. [26], and pertinent references. Notably, the wavelength parameters in the formulae represent ranges rather than precise values, acknowledging variations in band wavelengths across diverse remote sensing systems. This variation necessitates adaptability in selecting neighbouring band wavelengths for specific indices.
- Enhanced Vegetation Index (EVI) distinguishes the canopy structure and vegetation growth status of crops and is calculated from the visible near-infrared. Equation (1) shows how the EVI is calculated. L is a canopy background adjustment value. and are aerosol resistance coefficients that correct aerosol influences between wavelengths of 640 and 760 nm by using a band between wavelengths of 420 and 480 nm, and G is the gain factor. These factors are used between different remote sensing systems to account for their unique reflections and atmospheric values [37].
- Normalised Difference Senescent Vegetation Index (NDSVI), designed by Qi et al. [43], distinguishes both water content and the growth status and is based on visible shortwave infrared, a combination of the EVI and LSWI. Equation (3) shows how the NDSVI is calculated. These wavelengths are in the water absorption regions of the spectrum and can, therefore, be combined to extract information related to senescent vegetation.
- Normalised Difference Vegetation Index (NDVI), designed by Rouse et al. [44], measures the amount and density of green vegetation based on the near-infrared and red bands. This is useful for agriculture, as unhealthy crops reflect less near-infrared than healthy crops [45]. Equation (4) shows how the NDVI is calculated. The normalisation in the NDVI enables it to consistently measure the greenness with fewer deviations than a more straightforward ratio of the two bands [44].
- Shortwave Infrared Water Stress Index (SIWSI), estimates the water content of crop leaves. A shortwave infrared band operates on a wavelength influenced by leaf water content, enabling SIWSI to extract information related to the water content in crops. This can identify the stress level inflicted by the water content. Equation (5) shows how the SIWSI is calculated. An index value below zero indicates that the crops have sufficient water content. In contrast, values above zero indicate that the crops are experiencing some level of water stress due to too much water [46].
- Green–Red Normalised Difference Vegetation Index (GRNDVI), created by Wang et al. [47], is one of multiple vegetation indices using a combination of the red, green, and blue bands in an NDVI manner. The GRNDVI is one of the better vegetation indices for measuring leaf area index (LAI), an important feature related to crop health, growing stage, and type. Equation (6) shows the calculation for the GRNDVI.
- Normalised Difference Red-Edge (NDRE) is a vegetation index similar to the NDVI, which uses a ratio between the near-infrared and red-edge bands. It can extract information from remote sensing data regarding crops’ health and status, including the canopy’s greenness. Equation (7) shows the calculations for NDRE [48,49].
- Structure Intensive Pigment Index 3 (SIPI3) is a function of carotenoids and chlorophyll a. Carotenoids provide information about canopy physiological status while chlorophyll includes information about plant photosynthesis. The original SIPI was designed by Penuelas et al. [50] while attempting to achieve the highest correlation between carotenoids and chlorophyll for acquiring plant physiology and phenology information. The SIPI3 is a variation of this, shown in Equation (8).
- Green Atmospherically Resistant Vegetation Index (GARI), created by Gitelson et al. [51], is a vegetation index resistant to atmospheric effects while also being sensitive to a range of chlorophyll-a concentrations, plant stress, and rate of photosynthesis. The GARI is as much as four times less sensitive to atmospheric effects than the NDVI while providing similar information. Equation (10) shows how the GARI is calculated.
2.1.3. AI for Norwegian Agriculture: Crop Yield Prediction
- Crop classification and mapping: Satellite imagery has demonstrated efficacy in classifying various crop types and capturing their spectral dynamics, facilitating the detection of phenological disparities among them. However, leveraging satellite images for classification purposes presents inherent challenges [15]. For instance, Hu et al. [56] and Qui et al. [57] observed that stacking satellite images throughout the growing season often yielded redundant information. Hence, it is imperative to discern the types of features to employ and the appropriate AI architectures and techniques to utilise. Castillejo-González et al. [28] investigated the impact of transitioning from pixel-based classification (1D) to object-based classification (aggregating pixels). Their findings consistently favoured the object-based approach, indicating the superiority of 2D images over single-pixel values for grain classification. Ji et al. [13] employed multi-spectral temporal satellite images in 3D convolutional neural networks (CNNs) for crop classification. By leveraging a 3D CNN framework, they captured the temporal representation of the entire growing season, outperforming analogous 2D methods and exhibiting exceptional proficiency in identifying growth patterns and crop types. The prevalence of 3D CNN architectures in achieving superior feature extraction and representation of multi-spectral temporal data is well documented. Due to the diminished accuracy of pixel-based classification methods, Peña-Barragán et al. [58] devised an Object-Based Crop Identification and Mapping model, attaining an accuracy of 79%. Their analysis highlighted the substantial contribution of remote sensing images from the late-summer period to the classification model, followed by mid-spring and early-summer images. This disparity underscores the significance of late-growing-season images and underscores the challenge of early-season classification.
- Attention-based multiple-instance learning: In image classification research endeavours, datasets typically possess consistent labelling corresponding to their respective classes. However, this conformity is often lacking in real-world applications, as evidenced in medical imaging studies where multiple images may need more specific class labels, providing only generalised statements regarding their categorisation. Similarly, in agricultural contexts, the labelling of crops for each field needs to be completed, resulting in a semi-labelled dataset. Multiple-instance learning (MIL) has emerged as a thoroughly investigated semi-supervised learning method [59,60,61] to mitigate this challenge. MIL aims to predict the labels of bags, where bags comprise a mixture of labelled and unlabelled instances, departing from the conventional approach of classifying individual instances. In a traditional MIL framework, a single target class is specified, and bags are labelled as positive or negative depending on the presence or absence of at least one instance of the target class. Consequently, comprehensive knowledge of instance labels becomes unnecessary, thereby enhancing the suitability of MIL in scenarios with partially labelled data [60,62]. Notably, MIL models incorporate an attention mechanism that assigns an attention score to each instance within a bag, indicating its influence on bag classification. These scores are calculated using the softmax function, ensuring their collective summation to unity.Prior research has explored various approaches to bag classification. Cheplygina et al. [63] introduced bag dissimilarity vectors as features in the training dataset, representing each bag’s dissimilarity. Chen et al. [64] leveraged instance similarities within bags to construct a feature space, extracting crucial features for traditional supervised learning. Raykar et al. [65] investigated diverse instance-level classification techniques and feature selection methods within bags, yielding promising and competitive outcomes.
- State of the art techniques: In this section, the authors present state-of-the-art research endeavours pertinent to each hypothesis delineated earlier in this manuscript. The major focus is on identifying the most promising technique for cloud and noise removal and surveying multiple studies concerning crop classification utilising vegetation indices, thereby facilitating the selection of appropriate indices. Furthermore, the authors provide an overview of comparative state-of-the-art methodologies and solutions for early yield prediction and crop classification. The insights gleaned from these research efforts serve as a source of inspiration for the techniques and methods applied in this research study, serving as benchmarks against which to evaluate the outcomes in forthcoming sections.Detecting clouds in remote sensing images to create a training dataset may pose challenges for this research study. To address this requirement, Wen et al. [16] proposed a two-step robust principal component analysis (RPCA) framework designed to identify cloud regions within satellite images, removing them and restoring the affected areas. Their innovative approach obviates the need for a cloud-free satellite image dataset or any preliminary cloud detection pre-processing steps. Among the various promising cloud removal methods available, the recent work by Wen et al. [16] emerges as the most suitable technique. Given the time availability constraints, their methodology holds promise for mitigating noise in satellite images, potentially enhancing the accuracy of pertinent deep learning models.Sharma et al. [4] conducted an extensive investigation into the temporal dynamics of crop yield prediction, emphasising the importance of early-stage observations. Their study highlighted the critical role of satellite images in predicting crop yields from the initial months of the growing season, particularly the first month. Through systematic evaluation by replacing images from each month with noise and assessing the resulting root mean square error (RMSE), they demonstrated a significant increase in prediction error upon removing images from the first month, indicative of the pivotal role of early-season data. This observation resonates with the notion of early-season farming activities exerting substantial influence on subsequent yield outcomes, as detailed in Section 2.1.1. Motivated by this insight, Sharma et al. [4] devised a predictive framework for wheat crop yields leveraging raw satellite imagery. Their methodology involved the utilisation of convolutional neural networks (CNNs) to extract relevant information from multi-band satellite images over a time series. Subsequently, the CNN outputs were integrated into a long short-term memory (LSTM) network, facilitating the encoding of temporal features for yield prediction. Remarkably, their model achieved notably low training and validation losses, underscoring the effectiveness of their approach. Additionally, they augmented the prediction accuracy by incorporating supplementary features such as location and area information, enriching the input vector of the LSTM. The methodologies employed by Sharma et al. [4] are, thus, poised to play a pivotal role in shaping the methodology of this research study.Building upon this foundation, researchers delved into grain yield prediction specific to Norwegian agriculture, leveraging multi-temporal satellite imagery, weather data time series, and farm information. Their exploration culminated in the development of a hybrid deep neural network model, comprising sets of CNNs akin to Sharma et al. [4], along with a gated recurrent neural network for integrating CNN outputs with extensive weather, farm, and field features. Impressively, their hybrid model achieved a mean absolute error (MAE) as low as 76 kg/daa, demonstrating robust performance in predicting crop yields at the farm scale. Notably, their study compared favourably with the findings of Sharma et al. [4], indicating comparable levels of prediction accuracy. Furthermore, researchers ventured into early yield prediction endeavours, striving to forecast yields during the growing season. They observed an increase in error rates when attempting predictions using data from weeks 10 to 26 and from weeks 10 to 21, highlighting the challenges of in-season yield forecasting. Their findings underscored the need for comprehensive feature sets, including grain types, growing areas, and production benefits, to enhance the accuracy of in-season predictions. Additionally, they harnessed various data sources relevant to Norwegian agriculture (https://www.landbruksdirektoratet.no/nb (accessed on 21 April 2024)), including Sentinel-2 satellite images (https://sentinel.esa.int/web/sentinel/home (accessed on 21 April 2024)), meteorological data (https://frost.met.no/index.html (accessed on 21 April 2024)), cadastral layers (https://www.kartverket.no/en (accessed on 21 April 2024)), and field boundaries (https://www.geonorge.no/ (accessed on 21 April 2024)), emphasising the utility of diverse datasets in yield prediction research efforts. Given the limited availability of data related to grain production in Norway, the methodologies and datasets curated by researchers hold significant relevance and applicability for this research study. As such, their code base and acquired datasets have been integrated into our research efforts to streamline development and leverage existing computational resources effectively. This collaborative approach ensures continuity and builds upon the foundations laid by previous investigations, advancing the frontiers of crop yield prediction research within the Norwegian agricultural landscape.Prior to utilising remote sensing for crop productivity and yield prediction, a crucial preliminary task entails crop identification and farmland area calculation, which is currently unavailable during the growing season in Norway, as highlighted in the Introduction section. This necessitates predicting farmland area and crop content for accurate crop yield forecasting [66]. Kussul et al. [12] investigated the impact of spatial context learning on field classification performance, comparing a 2D model with a spectral domain learning approach from single pixels (1D). Their study employed five sets of convolutional neural networks (CNNs), each comprising two convolutional and max-pooling layers, followed by two fully connected layers with varying neuron numbers, utilising the ReLU activation function. The 1D and 2D implementations achieved accuracies of 93.5% and 94.6%, respectively, marking the highest classification accuracy identified to date. This suggests the relevance of both implementations, particularly the 2D version, to our research study, where satellite images or vegetation indices could be employed. Notably, their findings revealed that the classification accuracy for winter wheat, their sole grain type, surpassed other classes by 2–3%, indicating the presence of phenological information in remote sensing data pertinent to distinguishing wheat from other crop types. Although successful crop classification studies exist, each research effort exhibits uniqueness based on geographical environment, target crops, and available data. To our knowledge, only one previous work on crop classification in Norway has been conducted, by DigiFarm (https://digifarm.io/ (accessed on 3 May 2024)), a leading agriculture technology company in Norway. Their system utilises Sentinel images upscaled to 1 m resolution and field boundaries to classify over six crop types, achieving an accuracy of up to 92%. While their system employs satellite images of higher resolution than those in this study, it has been limited to specific regions in Norway. This can be seen in Figure 2. Notably, no research has been undertaken to generalise grain classification across all Norwegian grain producers.The MIL techniques delineated in Section 2.1.3 denoted advancements over contemporary methods. However, instance-level classification emerged as the sole approach yielding interpretable instance label results, albeit with generally low accuracy [62]. In response, Ilse et al. [62] introduced attention-based multiple-instance learning (MAD-MIL) to redress these shortcomings. Attention-based multiple-instance learning is a single-class MIL technique wherein a neural network model learns the Bernoulli distribution of bag labels through an attention-based mechanism. This mechanism, operating as a permutation-invariant aggregation operator, serves as an attention layer within the network. Utilising the weights of this layer post-prediction enables the extraction of interpretable information regarding the contribution of each instance within a bag to the bag’s label, along with providing indications of each instance’s label. Ilse et al. [62] outperformed several prior MIL research studies, achieving results comparable to state-of-the-art solutions. Additionally, they engineered a more adaptable MIL system, streamlining implementation. Adopting Ilse et al.’s [62] system could yield benefits for training a classifier using semi-labelled data for remote sensing crop classification. However, it is pertinent to note that Ilse et al.’s [62] system is tailored for a single target class, necessitating extension to operate within a multi-class environment.Vegetation indices play a pivotal role in agricultural applications, particularly in crop classification and mapping. However, limited research focusing exclusively on grain types within crop classification has been identified. Hence, exploring the application of vegetation indices becomes imperative, considering the multitude of available indices and their potential to differentiate common crop types in Norwegian agriculture. This section delves into state-of-the-art research on various vegetation indices. These emphasised studies have achieved high classification accuracy or revealed insightful characteristics of specific indices relevant to crop types. Hu et al. [15] employed a time series of multiple vegetation indices to discern phenological differences between corn, rice, and soybeans. Leveraging 500 m spatial resolution satellite images, the researchers investigated the efficacy of five vegetation indices, including the LSWI and the NDSVI, in distinguishing target classes. Their findings underscored the importance of using multiple vegetation indices over time, showcasing the promising utility of the LSWI and the NDSVI in crop classification. Foerster et al. [14] utilised the NDVI vegetation index to classify 12 crop types, reporting varying accuracy levels across different crops. Notably, the NDVI performed well in classifying grain types, with winter wheat, barley, and rye achieving high accuracy. Their temporal analysis of NDVI profiles throughout the growing season revealed distinct trends for each crop type, offering valuable insights for crop mapping efforts.Peña-Barragán et al. [58] highlighted the positive impact of NDVI and SWIR-based vegetation indices in crop type mapping, with the NDVI contributing significantly to model learning. This underscores the relevance of NDVI and SWIR-based indices in crop classification research. Ma et al. [67] investigated multiple vegetation indices derived from multi-temporal satellite images to detect powdery mildew diseases in wheat crops. Their findings demonstrated the efficacy of these indices in predicting crop diseases, highlighting their potential for providing early insights into crop health. Wang et al. [47] evaluated various combinations of red, green, and blue bands to develop the GRNDVI, which exhibited strong correlations with leaf area index (LAI). The GRNDVI emerges as a promising index for differentiating crop types based on leaf sizes. Barzin et al. [48] analysed 26 vegetation indices to predict corn yields, identifying NDRE, the GARI, the SCCCI, and the GNDVI as dominant variables for yield prediction. Their findings offer valuable insights into feature selection for crop yield prediction models. Susantoro et al. [68] extensively analysed 23 vegetation indices to map sugarcane conditions, identifying the NDVI, LAI, SIPI, ENDVI, and GDVI as pertinent indices. The SIPI emerges as a novel index with potential applicability in crop classification. Metternicht et al. [69] evaluated four indices, including the PVR, for distinguishing crop density variations. The PVR emerges as a promising index for classifying crop types based on density variations, offering valuable information for machine learning models. These research efforts collectively underscore the significance of vegetation indices in crop classification and mapping, providing a diverse array of indices with potential applicability in the agricultural domain.
2.2. Research Methodology
2.2.1. Sentinel-2A Satellite Images
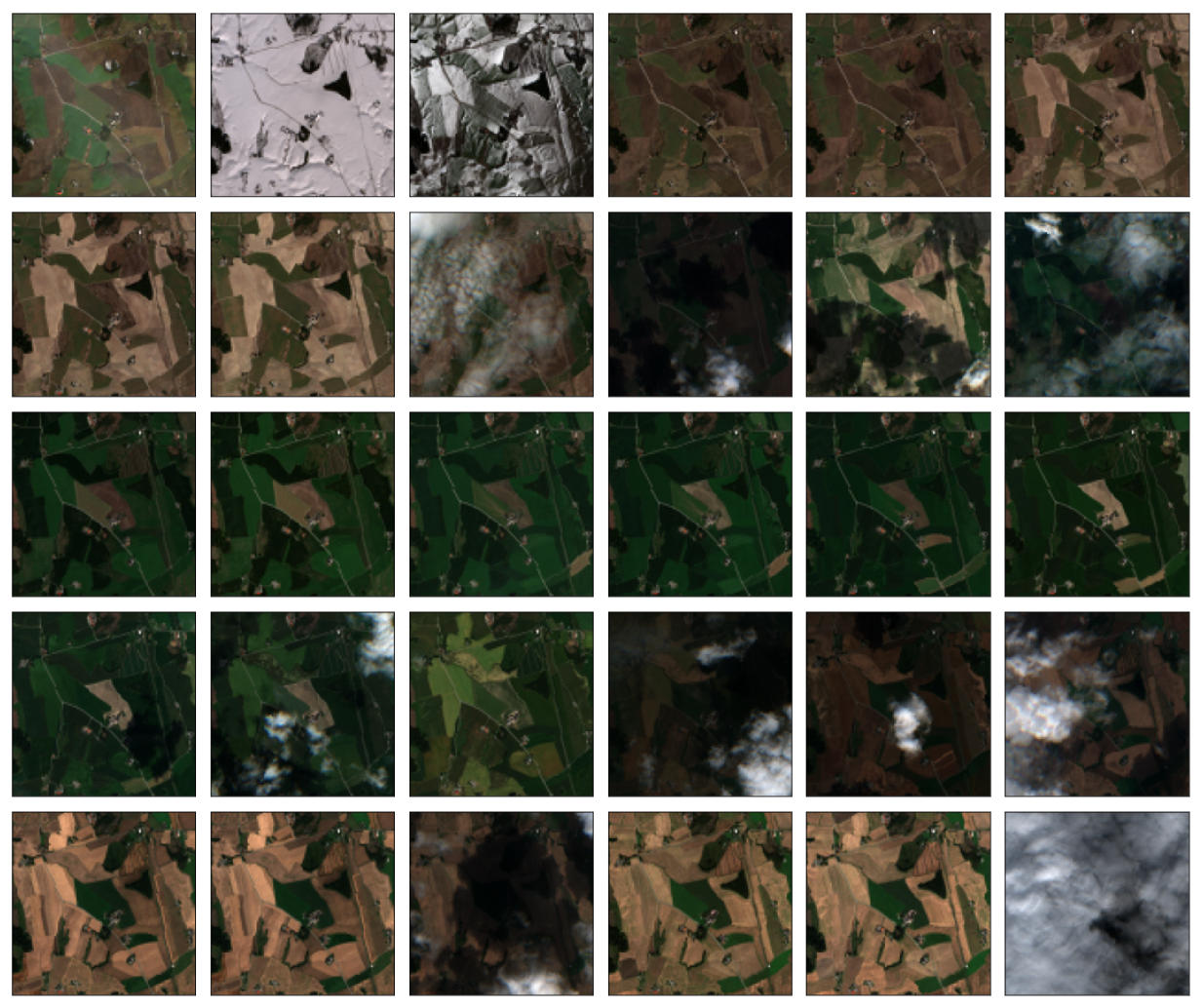
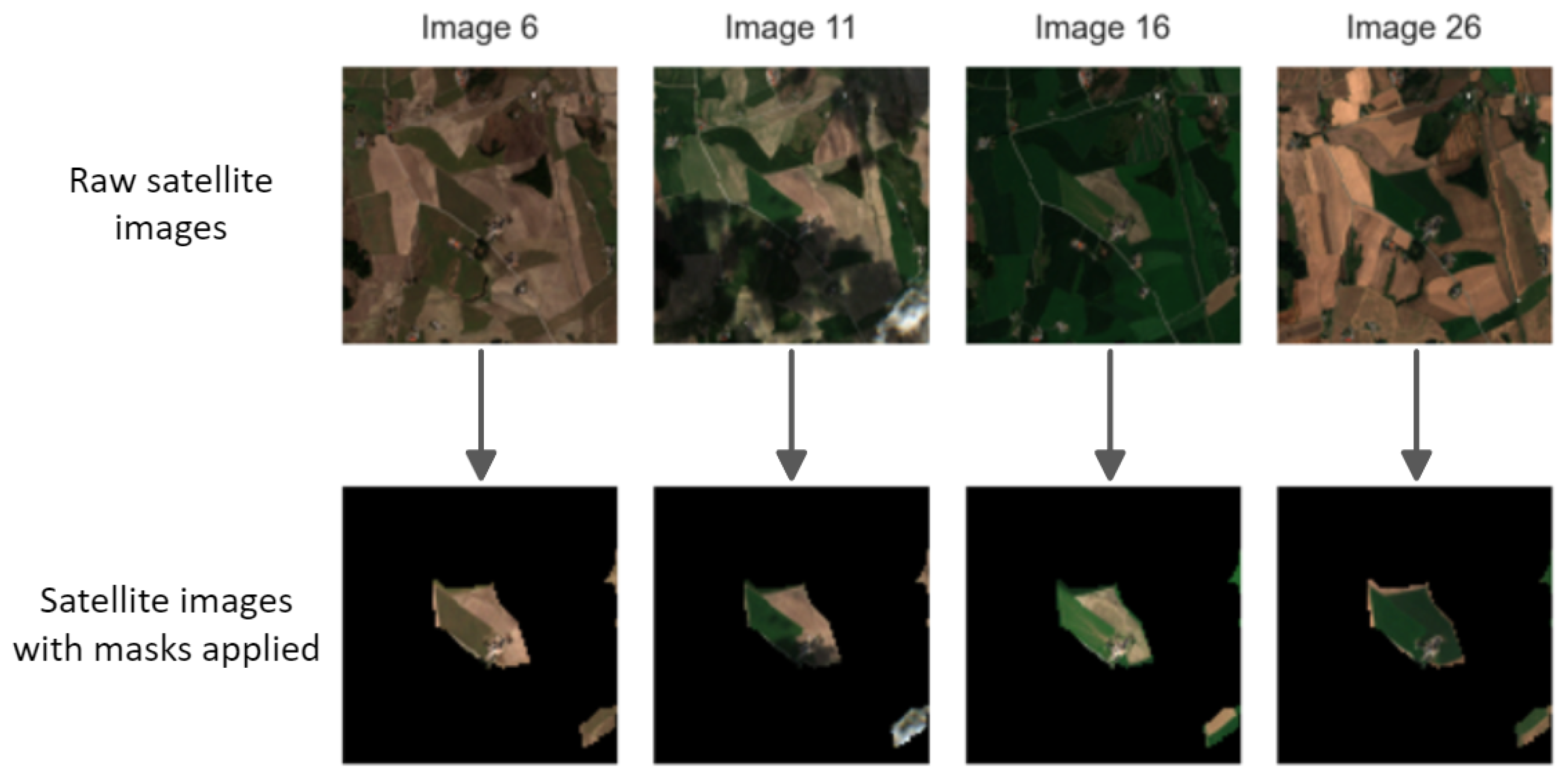
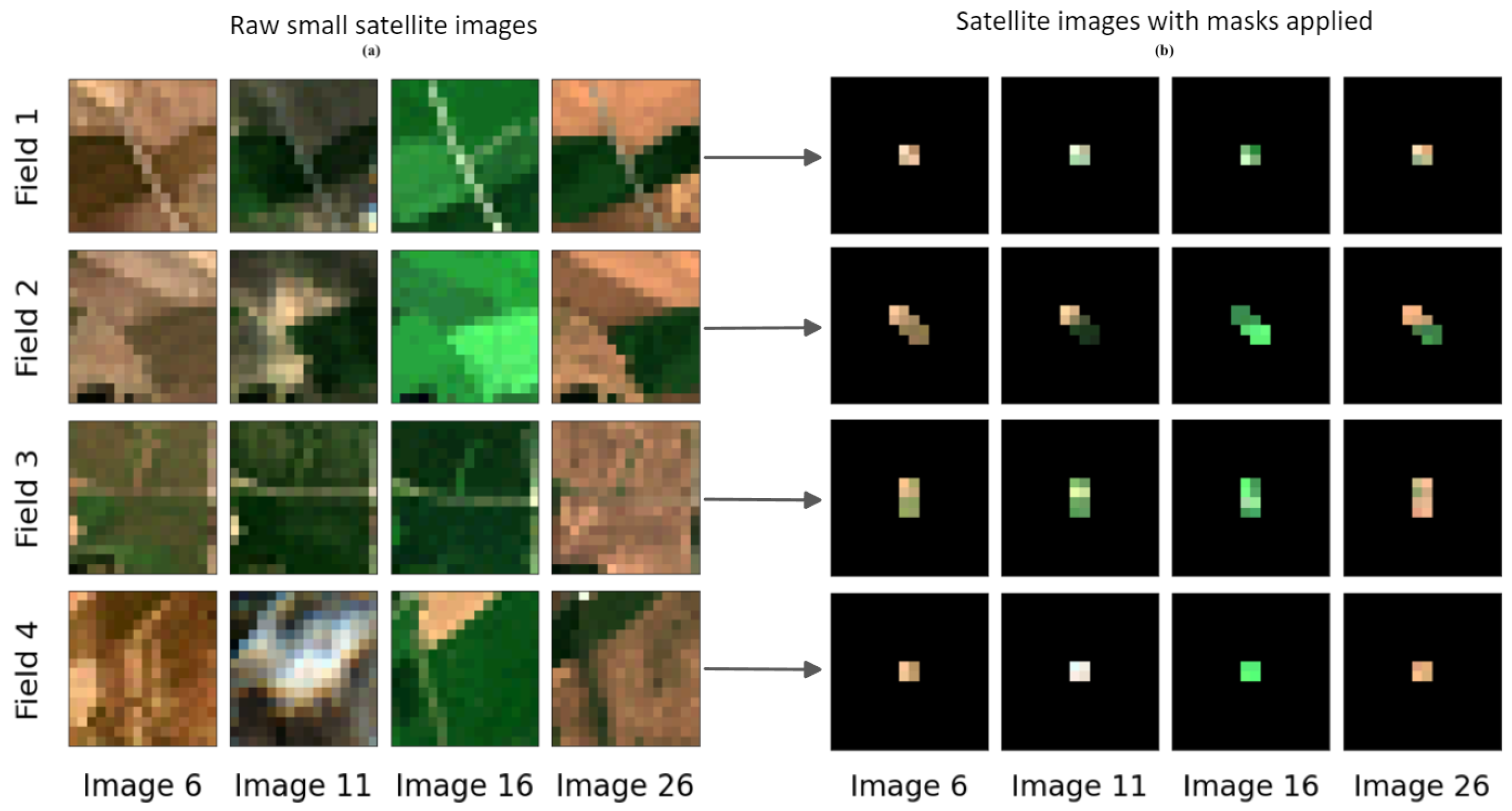
- Masking remote sensing images: To filter out pixels and extract relevant information from remote sensing images, masks were applied. The process of generating image masks involves three key steps, as explained in the state-of-the-art work in [7]. Firstly, the bounding box intersects with the cultivated fields for each farm, retaining only the coordinates corresponding to the cultivated areas within the satellite images. Next, the geographic map coordinates of longitude and latitude are converted to pixel locations within the satellite images. Since the images have dimensions of pixels, the bounding boxes delineate the borders of these images, with the top-left corner being (0,0) and the bottom-right corner being (100,100). Each point within the bounding box representing a cultivated field is then mapped to pixel coordinates based on its relative position within the bounding box. Finally, a matrix of zeros and ones is generated based on the locations of the cultivated fields, resulting in a binary matrix. This matrix serves as the mask, with ones indicating the presence of cultivated areas and zeros representing non-cultivated regions within the satellite images.This research effort generated additional masks for various types of remote sensing images. The mask creation process was based on the geometry of the farm obtained from disposed properties, which will be explained later in this manuscript, representing the arable land area of the farm. The coordinates of the farm’s location were utilised as the centre of the mask to ensure precise alignment with satellite images. Each pixel in the mask was assigned a Boolean value, where a value of true indicated that the pixel fell within a property boundary belonging to the farm. Prior to utilising remote sensing images, each channel of these images was multiplied by the corresponding mask. This operation effectively converted pixels outside the farm’s property boundaries to zero, thereby eliminating irrelevant information for subsequent modelling tasks. This process is visually depicted in Figure 4, where the left side illustrates four satellite images of the same farm, while the right side displays the same images with masks applied.
- Extracting field boundaries from remote sensing images: For the preliminary crop classification experiment, raw satellite images were employed. During experimentation, it became evident that each satellite image encapsulates information for multiple fields within a farmer’s farmland, often featuring different crop types. Consequently, applying a single crop type label to every image proved impractical. To address this, new field-based images with dimensions of were generated, each covering a single field. To facilitate the creation of these field-based images, the latitude and longitude for each farm and field were translated to values between 0 and 100, corresponding to its central position on the raw satellite image. In cases where the field’s position extended beyond the satellite image boundaries, an offset was applied. Once the field was correctly positioned, the satellite image was cropped using a side, as illustrated in Figure 5.
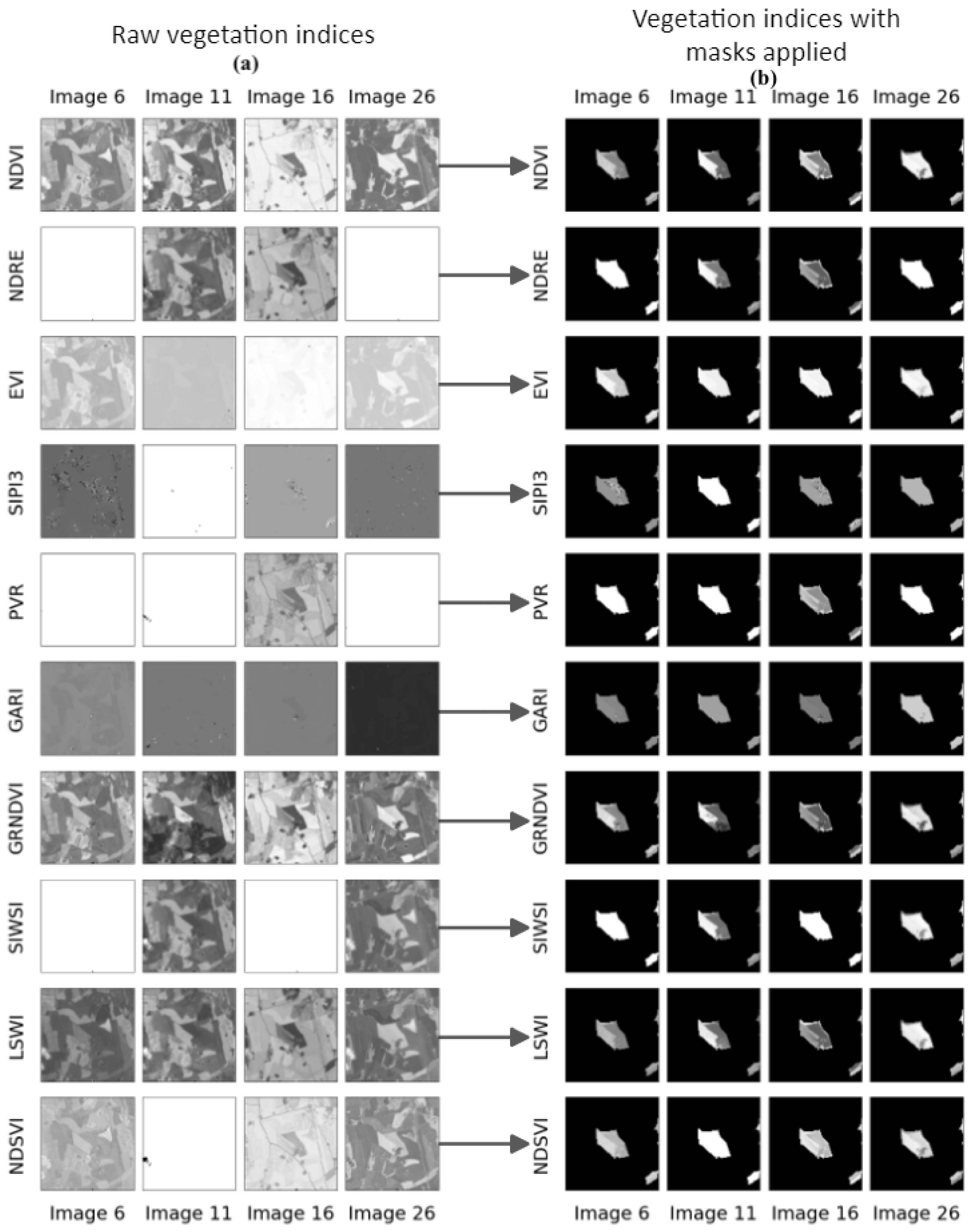
- Vegetation indices derived from satellite images: Throughout the literature reviewed in the previous Section 2.1.2, the efficacy of various vegetation indices for classifying and mapping crop types was demonstrated by several research efforts, including those by Hu et al. [15], Ma et al. [67], Wang et al. [47], and Barzin et al. [48]. These studies highlighted the utility of different vegetation indices derived from raw Sentinel images for agricultural applications. To identify suitable indices for Norwegian agriculture, a selection was made based on the findings of these research efforts.The appropriate Sentinel-2A bands for each vegetation index were determined using the wavelength information provided earlier in this manuscript, as well as studies by Kobayashi et al. [42] and Henrich et al. [26]. Subsequently, formulae were derived based on the theoretical foundations presented earlier. These formulae utilised the band numbers corresponding to the Sentinel-2A bands listed in Table 1. These calculations were performed to generate vegetation indices from every available raw satellite image, adhering to established methodologies and principles outlined in the literature.The vegetation indices were computed by extracting the relevant bands from the acquired Sentinel-2A satellite images and applying their respective formulae, as explained earlier in this manuscript. Ten vegetation indices were calculated for each of the 30 satellite images captured throughout the growing season for each farm. These indices were then stacked to form a image array. Examples of ten vegetation indices can be seen in Figure 6a, with the corresponding property masks applied that can be seen in Figure 6b. The images were normalised to a range between 0 and 1 to facilitate visualisation of the differences within the images. A greyscale representation was used as the images consist of a single channel. Blurry or blank areas in some images could be attributed to factors such as cloud cover, noise, limitations inherent to the vegetation index, or constraints in visualisation. A field-based dataset was constructed from the vegetation index images to facilitate classification using the vegetation indices, akin to the process employed for raw satellite images previously detailed in this section. Examples of two fields depicted using the NDVI, LSWI, and NDSVI vegetation indices are illustrated on the left side of Figure 7, with the corresponding field masks applied on the right side of Figure 7.
2.2.2. Geographical Data
2.2.3. Temporal Meteorological Data
2.2.4. Norwegian Grain Production Data:
3. Results
3.1. Baseline Approaches: Improving Grain Yield Predictions with DNN
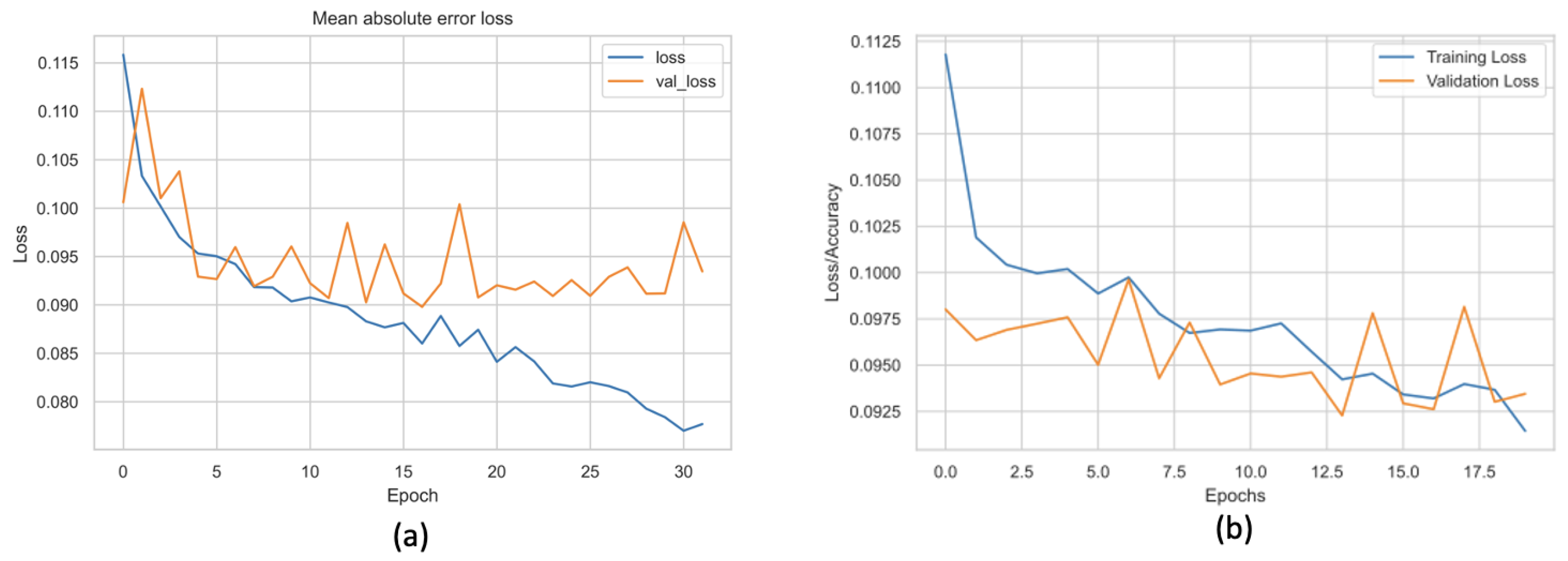
- Weather features to dense neural network: The authors enhance the utilised data by introducing three novel features—sunlight duration, state of the ground, and growth degree—into the training dataset. These additional features are integrated with farmer organisation numbers, expanding the feature count from 900 to approximately 1500. The authors subsequently re-implement the dense neural network (DNN), where the authors observed the initial signs of overfitting. Consequently, the model is adjusted by reducing the size of the first dense layer to 256 and marginally increasing the dropout percentages to 0.25 and 0.5, respectively. As illustrated in Figure 8b, a noticeably diminished disparity between training loss and validation loss is evident compared to Figure 8a, signifying mitigation of overfitting. The mean absolute errors (MAEs), measured in kg per 1000 m2 for the baseline and the newly proposed optimised models, stand at 83.85 kg per 1000 m2 and 83.28 kg per 1000 m2, respectively; see Table 2 and Figure 8. As a result, the authors opt to employ this newly proposed and optimised DNN model for subsequent experiments.
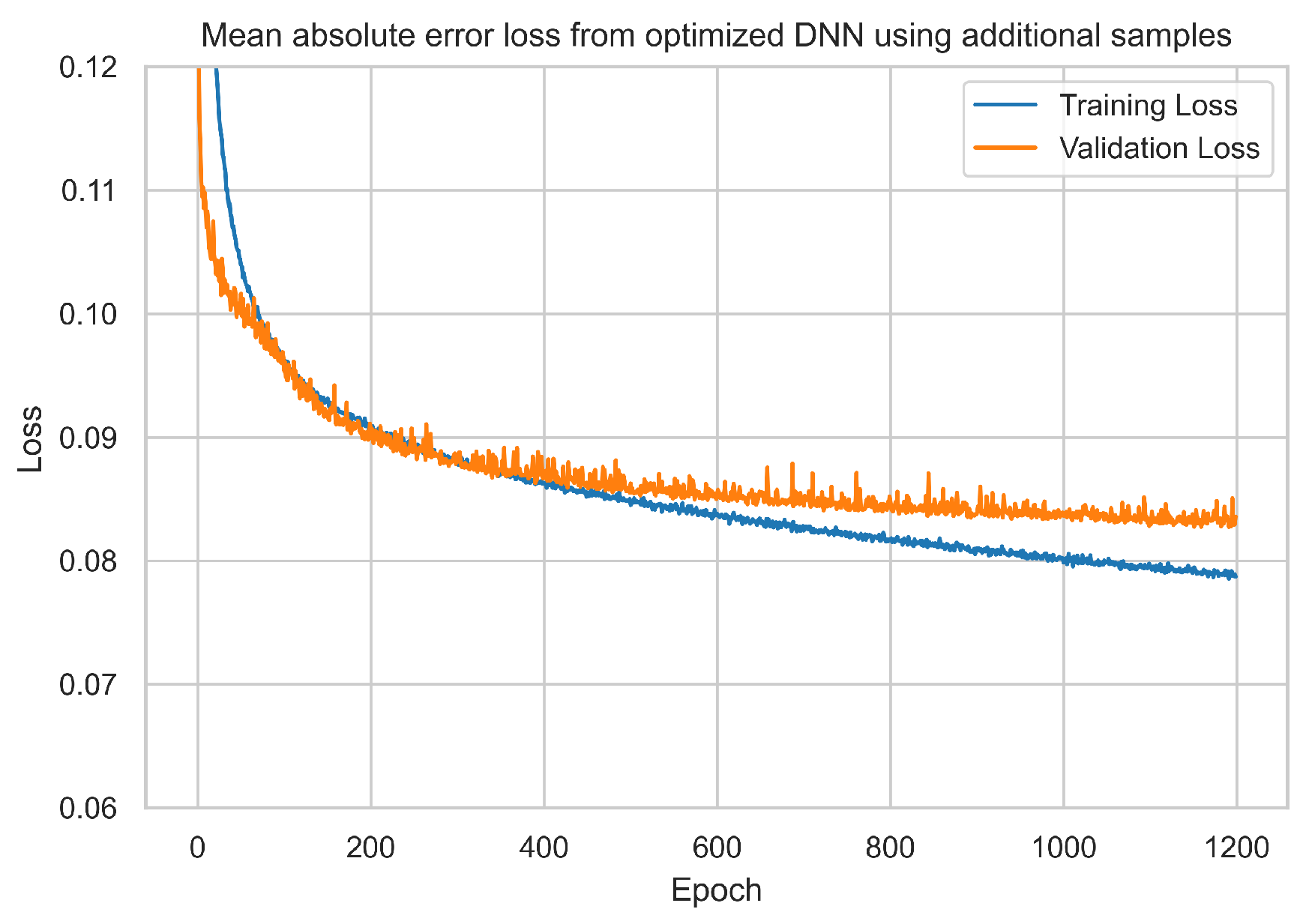
- Extended data corpus to dense neural network: The authors believe that augmenting the training dataset with additional data samples has the potential to improve accuracy. To substantiate this hypothesis, they re-implemented scripts sourced from the Frost API (https://frost.met.no/ (accessed on 5 May 2024)) to expand the weather data by 33% for 2020. Following this augmentation, the data underwent pre-processing, employing interpolation and normalisation techniques. The optimised dense neural network (DNN) model was subsequently trained for 1200 epochs, resulting in diminished loss values for both the training and validation sets. Furthermore, the mean absolute error (MAE) for this particular experiment was computed as 82.82 kg per 1000 m2 (see Table 2 and Figure 9), closely resembling the performance of the optimised DNN model discussed earlier in this section.
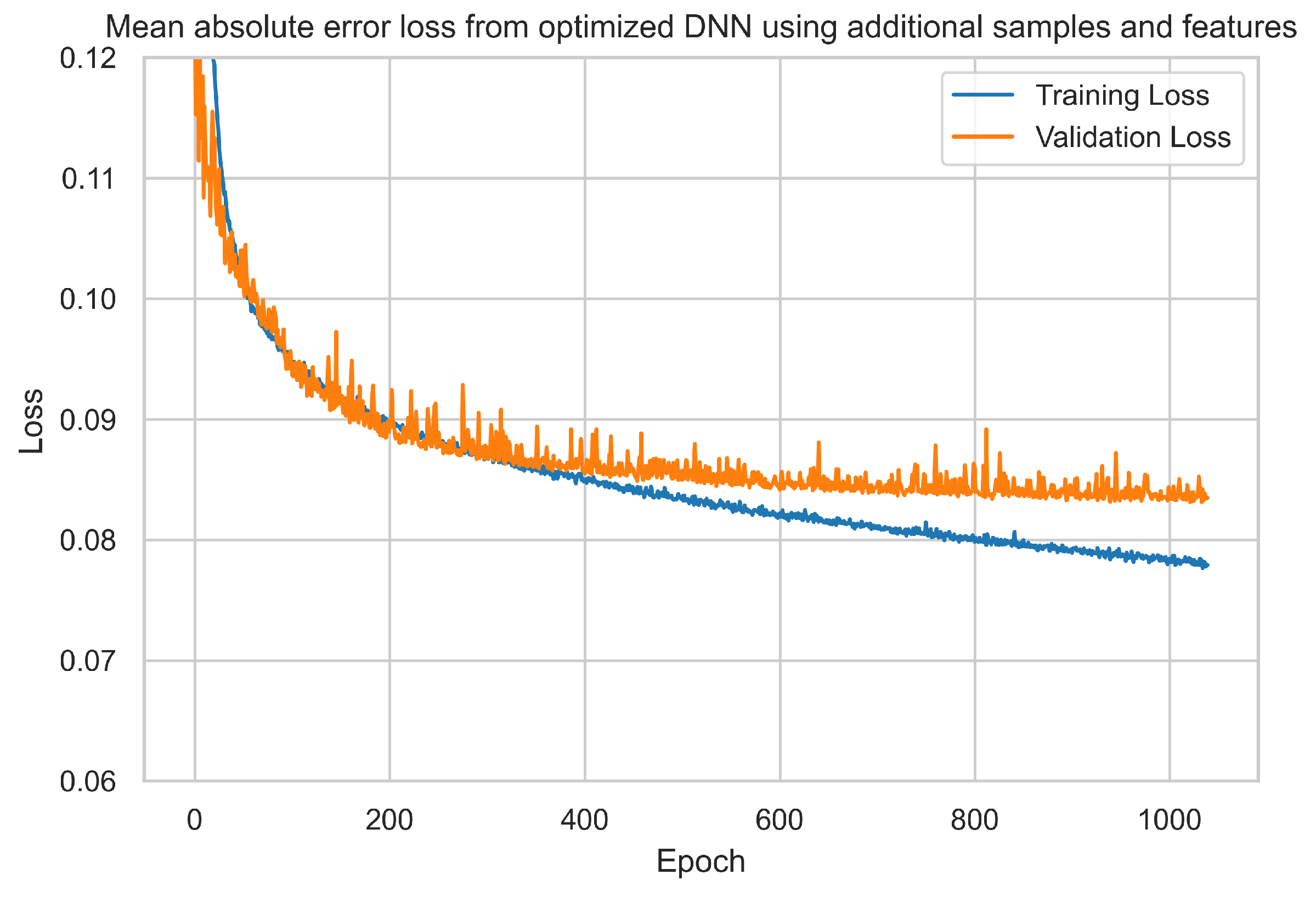
- Integration of features and data corpus to dense neural network: Following the integration of the dataset with additional weather features and data samples, as previously detailed, a further 600 features and approximately 15,000 samples were incorporated. The optimised dense neural network (DNN) model, adapted to accommodate the expanded input shape, underwent 1200 training epochs. As a consequence, the mean absolute error (MAE) value exhibited a marginal decrease of approximately 0.7 kg per 1000 m2, which resulted in a value of 82.60 kg per 1000 m2; see Table 2 and Figure 10. Furthermore, a minor increase in training time of approximately 5 to 6 min was observed, attributed to the enlarged data corpus.
3.2. State-of-the-Art Approach: Improving Grain Yield Predictions with Hybrid CNN Model
3.3. Novel Approaches: Improving Early In-Season Grain Yield Predictions with Grain Classification Models
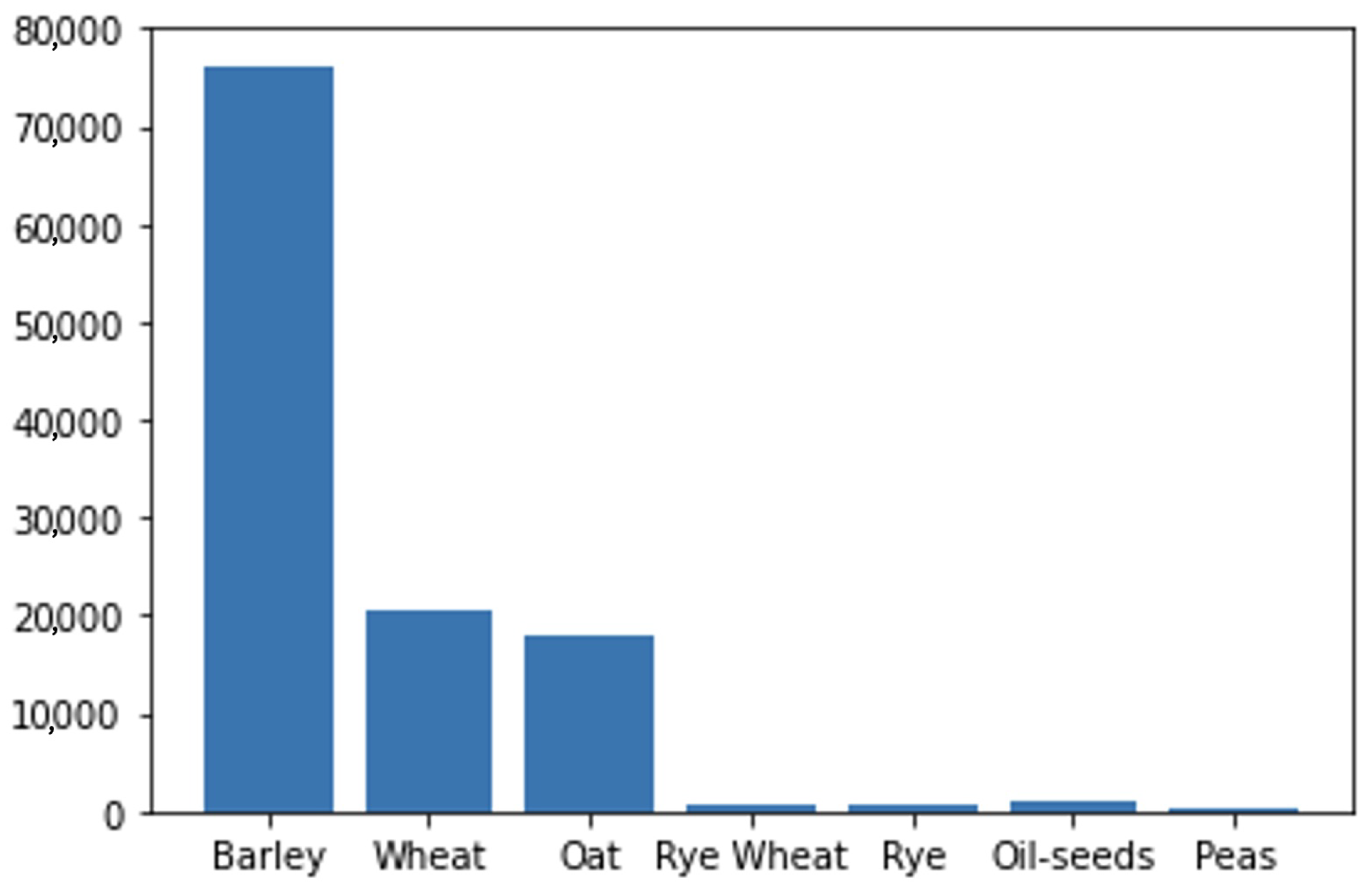
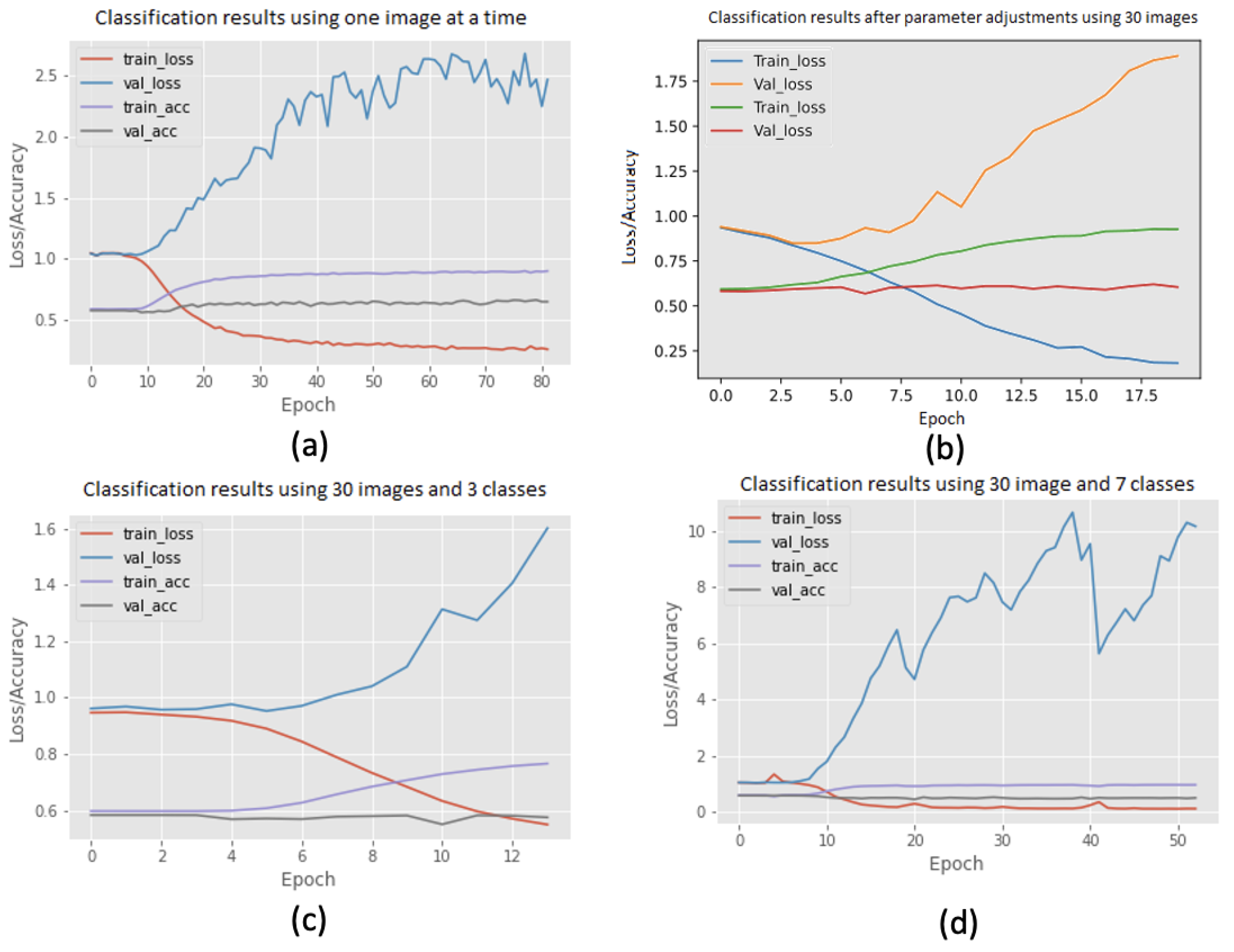
- Farm-scale grain classification: The proposed model for farm-scale crop classification is designed to ascertain the crop type planted on a given farm based on a time series of 30 satellite images. The classification dataset operates under the assumption that all fields associated with a particular farm contain a singular crop type. This assumption raises concerns regarding the reliability of results, as the classification dataset lacks a foundation in ground truth, as previously discussed. Furthermore, the images may incorporate significant noise, such as clouds, potentially leading to misguidance of the classification model. Consequently, the authors implemented image masking and data augmentation techniques during training. The initial classification model utilised the convolutional neural network (CNN) and gated recurrent unit (GRU) components of the hybrid model. In this architecture, the GRU encodes the entire time-series data sequence into a 64-length vector, then flattens it. The final dense layer of the model, employing a softmax activation function, generates a vector with percentage predictions for each crop type. However, this model exhibited a tendency to overfit due to the limited number of images used in the time-series data.As illustrated in Figure 11, barley, wheat, and oats are extensively cultivated in Norway, while the four less prevalent crop classes—rye wheat, rye, oil seed, and peas—exhibit lower prevalence. The authors posit that rectifying this imbalance by excluding the less prevalent crop classes could contribute to a more balanced dataset, thereby enhancing model performance. Consequently, the authors explored four distinct variations in experimentation: inputting one image at a time from the 30-image time series (see Figure 12a), inputting all 30 images with hyper-parameter adjustments (see Figure 12b), inputting all 30 images with three crop classes (see Figure 12c), and inputting all 30 images with all seven crop classes (see Figure 12d). Various attempts were made to adjust network hyperparameters, eliminate crop type classes with low occurrences, and implement exponential learning rate decay with diverse parameters to alleviate overfitting. Unfortunately, these adjustments did not yield improvements, prompting consideration for field-based crop classification. It is evident from the results that the training loss exhibits a declining trend throughout the experiments, indicating that the model assimilates certain features and subsequently enhances training accuracy.Moreover, the validation accuracy predominantly remains constant, even after training for 80 epochs, and in most cases, the validation loss experiences an increase. The distinct models underwent varying amounts of processing time as each experiment manifested a consistent negative trend; see Figure 12. The graphical representations illustrate that the validation accuracy consistently hovers around 0.6 for all implemented models. The initial random image model achieved its highest training accuracy at 0.8; however, acknowledging its tendency for overfitting, the authors decided to explore the field-based grain classification to enhance target analysis.
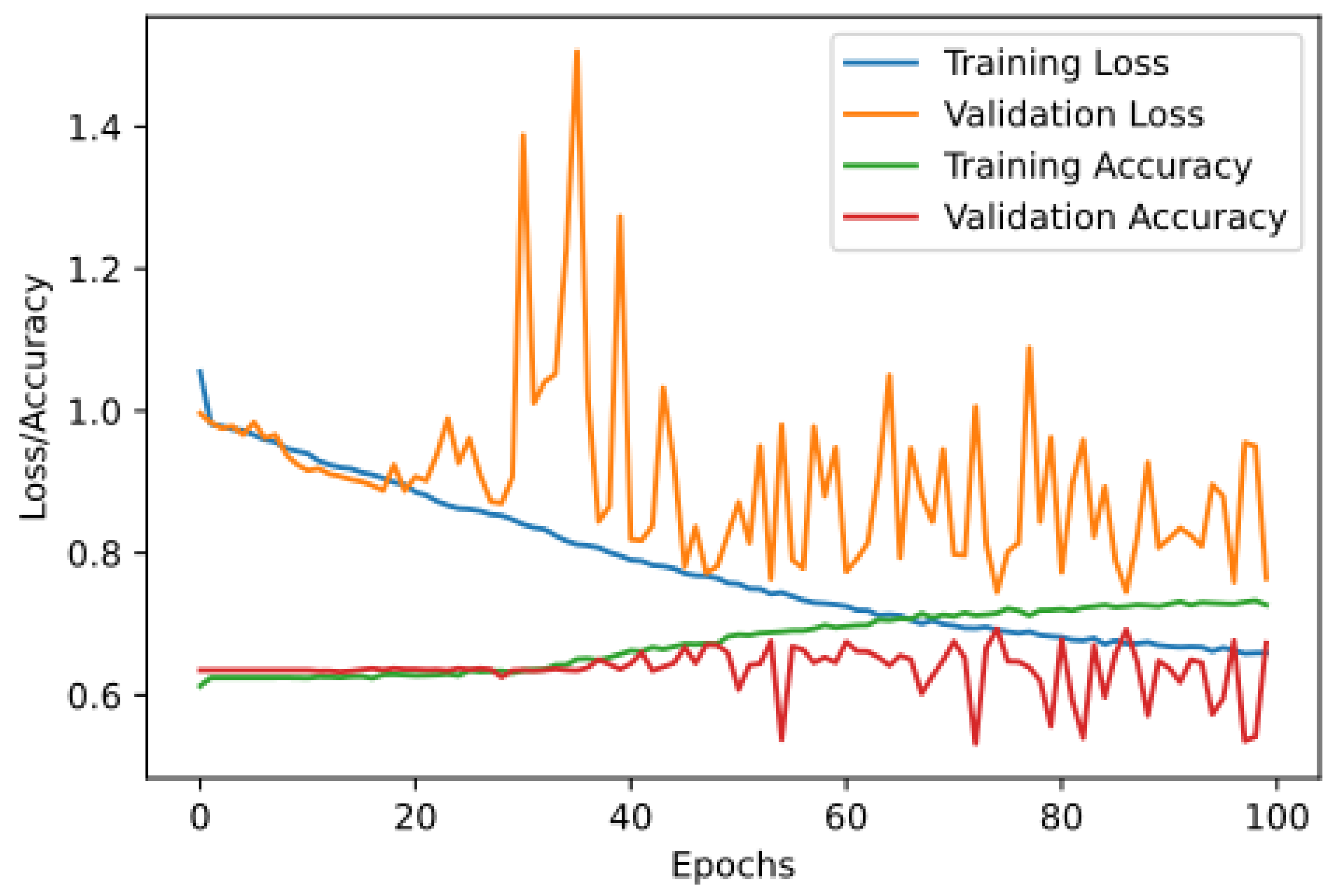
- Field-based grain classification: The field-based crop classification model categorises crop types based on time-series images of individual fields rather than the entire farm. This approach offers the advantage of reduced noise in the images, leading to a faster training process. The creation of field-based images is detailed earlier in this manuscript. These images have dimensions of , sufficiently large to encompass even the most extensive fields while remaining significantly smaller than the original size. The fields with the smallest areas were excluded from consideration, as these would cover only one or two pixels in the satellite images, providing minimal data for the network. This exclusionary criterion was applied to all subsequent experiments related to field-based crop classification. Moreover, the satellite images underwent augmentation techniques such as salt and pepper, rotation, and random flips. Augmentation was incorporated due to its efficacy in mitigating overfitting in machine learning models. Subsequently, the images were integrated into a TensorFlow Generator and inputted into the model. During the reconstruction of the model for field-based images in this experiment, inspiration was drawn from a study by Ferlet (https://medium.com/smileinnovation/training-neural-network-with-image-sequence-an-example-with-video-as-input-c3407f7a0b0f (accessed on 6 May 2024)) to further enhance model performance. Additionally, the successful 2D CNN implementation with multiple sets of CNN, max-pooling, and ReLU by Kussul et al. [12] was evaluated. The researchers achieved a crop type classification accuracy of 94.6%. Therefore, their architectural structure and functions were considered and evaluated for application in this experiment.
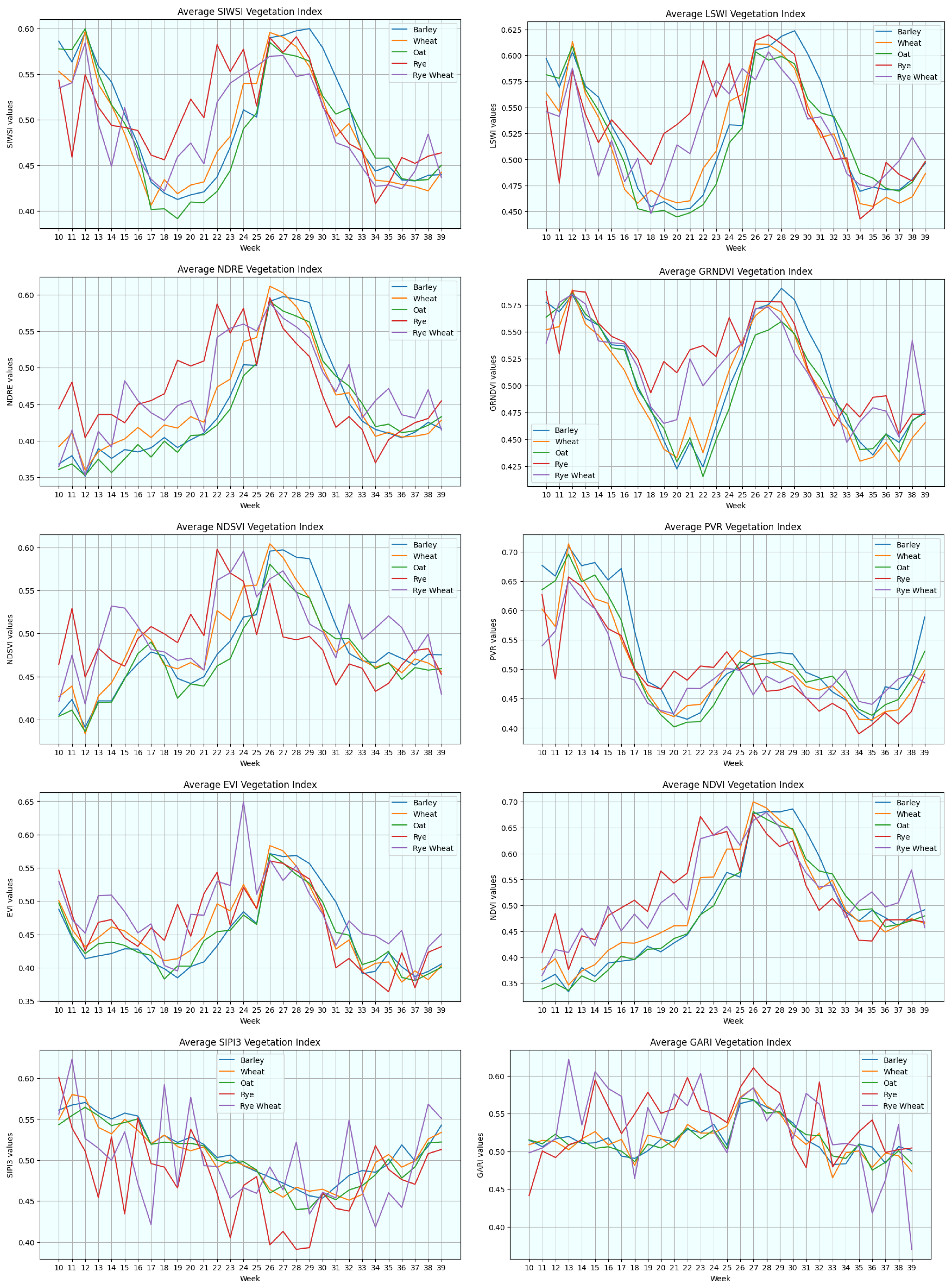
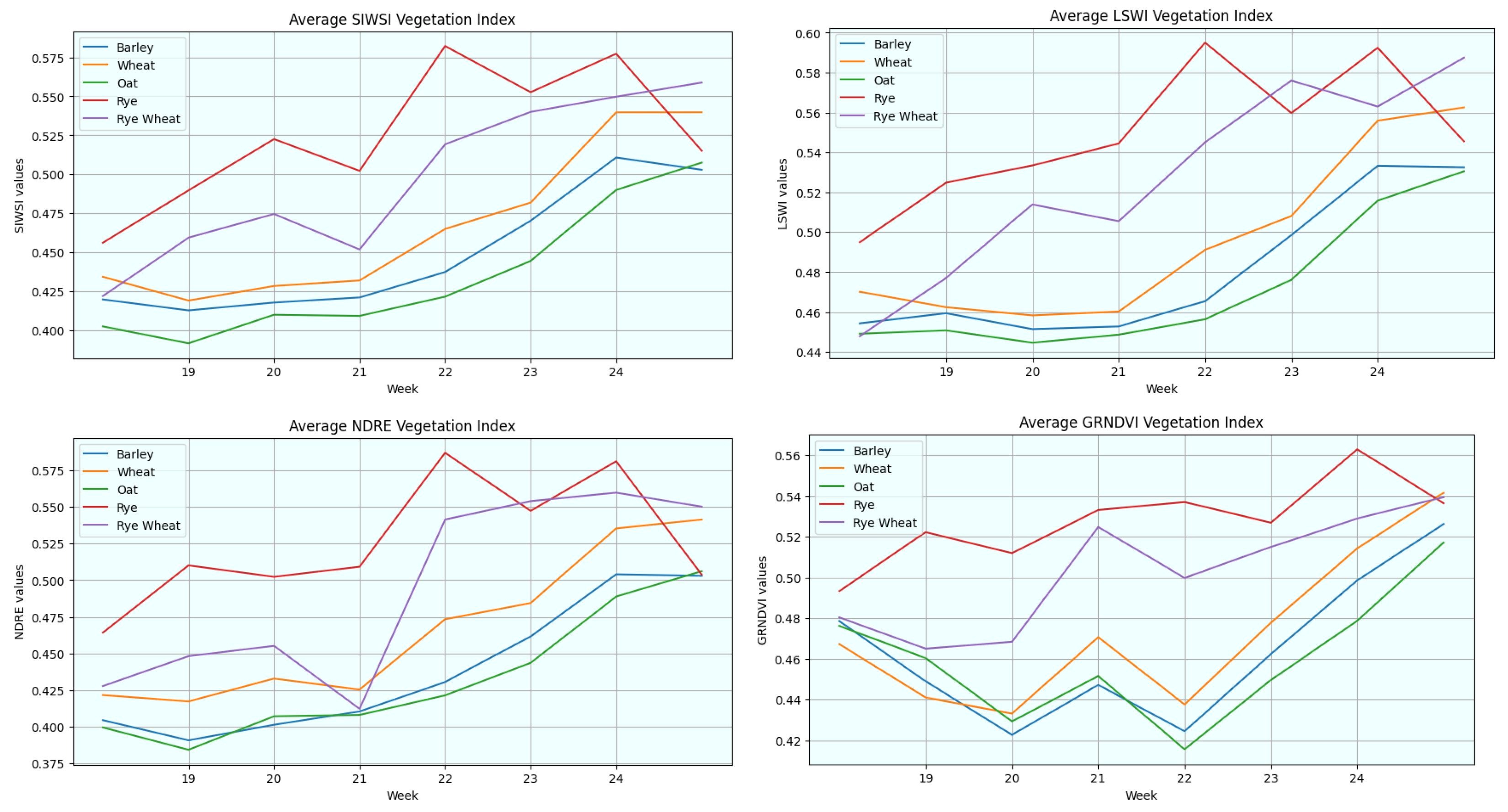
- Improving field-based grain classification using vegetation indices: As delineated in Section 2.1.2, the average temporal profiles of vegetation indices were computed for each crop type throughout the growing season. Given the many crop types across ten distinct graphs, the visual representation could become convoluted and challenging to interpret. Consequently, the results for oil seeds and peas were excluded for streamlining the presentation and focusing on the most pertinent information, as they hold lesser relevance to crop classification and crop yield analysis. Figure 14 displays graphs of the five primary crop types. Each graph in Figure 14 illustrates the temporal trajectory of a specific vegetation index, with individual lines representing different crop types. While some graphs may appear similar superficially, a closer examination reveals meaningful insights about the vegetation indices. Many indices exhibit a common trend in their temporal development, characterised by gradual growth throughout the growing season until reaching a peak, likely indicative of crop maturity, followed by a sharp decline during harvest.
- The farm’s field masks, as outlined in the previous section, were applied to their respective locations to exclusively utilise vegetation index values from fields.
- For each vegetation index image, the values were normalised within the range of 0 to 1. Subsequently, the average of these normalised values was calculated and stored. This process was executed for every vegetation index image for each farm’s 30 images annually.
- The averages computed in the preceding step were aggregated across all images to derive an average of the averages. Notably, this aggregation was performed while filtering for crop type, signifying that each vegetation index yielded an average weekly value specific to each crop type.
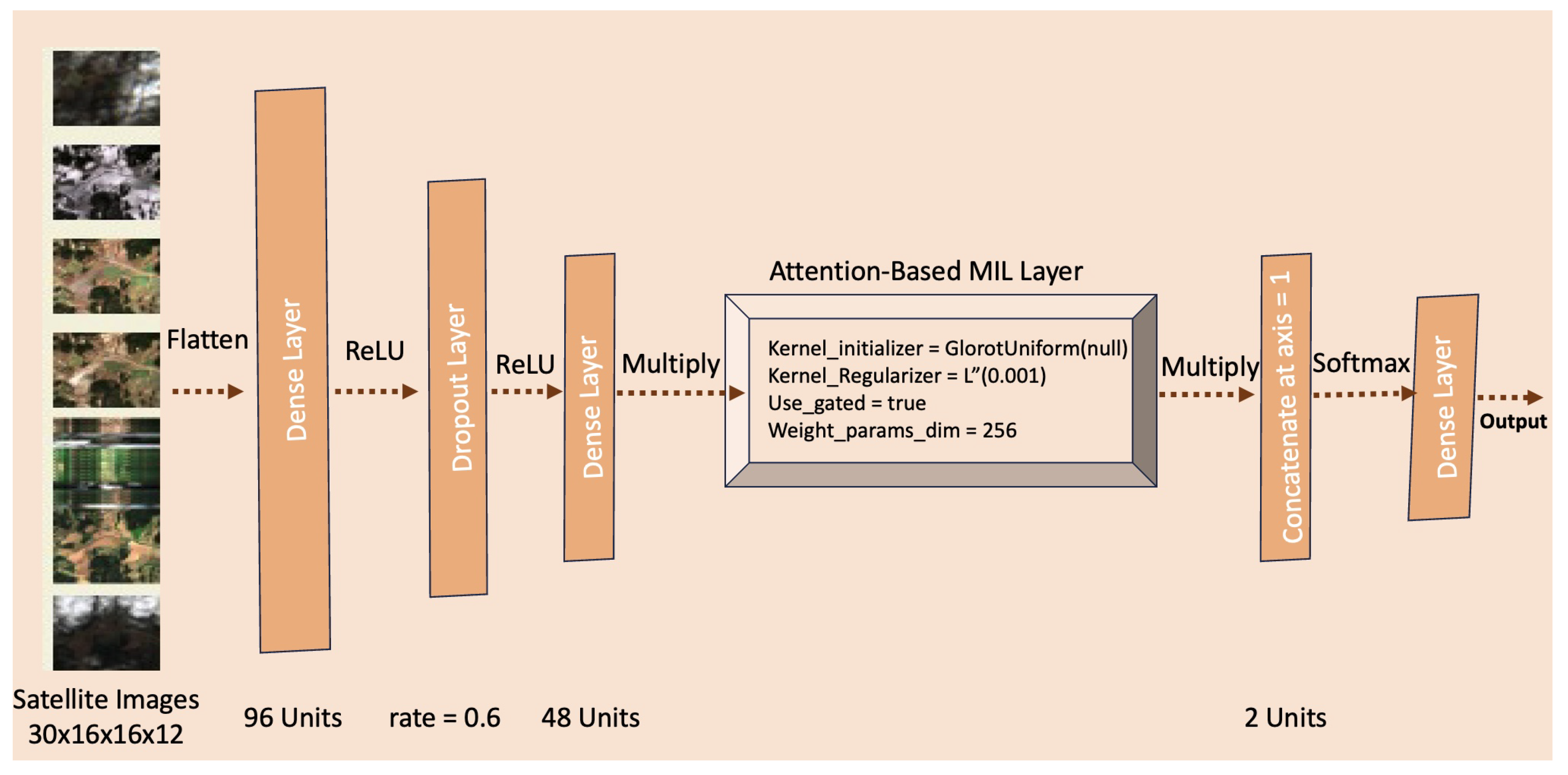
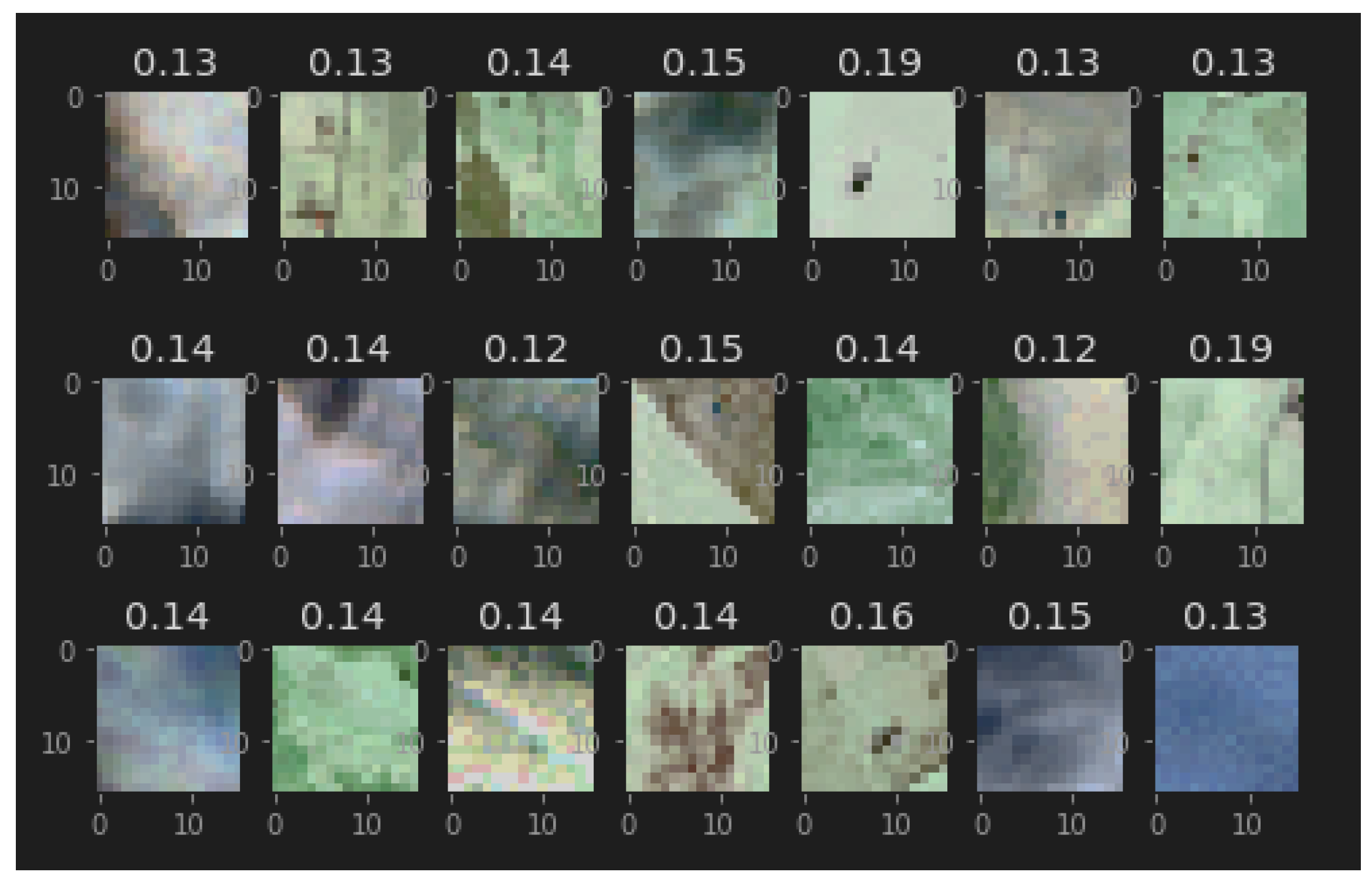
- Multi-class attention-based deep multiple-instance learning (MAD-MIL) to grain classification: As discussed earlier in this paper, the labelling of raw satellite images for a single crop type was unfeasible due to the fusion of information from multiple fields within each image. Consequently, the acquisition of semi-labelled agricultural data became imperative. To train this semi-labelled data effectively, the authors proposed implementing a multi-class attention-based deep multiple-instance learning (MAD-MIL) model, anticipating better results. The MAD-MIL model (https://keras.io/examples/vision/attention_mil_classification/ (accessed on 6 May 2024)) was realised with TensorFlow and Keras’ implementation serving as the foundation. Subsequently, the dataset was partitioned into training and validation bags, employing distinct parameters and an optimal bag size. Through experimentation, selecting a bag size of seven aimed to strike an optimal balance between positive and negative bags. The neural network was trained utilising the Adam optimiser with a learning rate 0.001, spanning 150 epochs. Various bag sizes were explored, including 100, 200, 300, 500, and 750. Additionally, validation bag sizes were adjusted within the range of 100 to 250, contingent upon the chosen training bag size. These meticulous considerations were made to ensure the effectiveness of the MAD-MIL model in capturing relevant features and patterns within the semi-labelled agricultural data.
3.4. Novel Approaches to Early In-Season Grain Yield Predictions
3.4.1. Implementing Early Crop Type Classification
3.4.2. Implementing Early Grain Yield Prediction
4. Discussion
4.1. Understanding the Improvements over Baseline Approaches
4.2. Understanding the Importance of Crop Classification
4.3. Understanding the Importance of MAD-MIL in Crop Classification
4.4. Understanding the Outcomes from Early Yield Predictions
4.5. Understanding the State of Satellite Images
4.6. Understanding the Importance of Vegetation Indices
4.7. Understanding the Importance of Field Boundary Detection
5. Conclusions
- Hypothesis 1: Features associated with sunlight exposure, growth temperature, ground state, and soil quality hold potential for enhancing prediction models aimed at improving grain yield forecasts.Extensive investigation and application of novel data features associated with plant growth facilitated the acquisition of a comprehensive understanding of growth-related information distribution. Integrating these data features into various reconfigured grain yield prediction models yielded competitive outcomes, validating that incorporating additional growth factors enhances system performance.
- Hypothesis 2: Extending the agricultural dataset to predict grain yields by incorporating an additional year of data samples is anticipated to result in improved predictive accuracy, highlighting the significance of longitudinal data collection.Expanding feature pre-processing capabilities within the code base facilitated seamless data acquisition during successive growing seasons. Incorporating data samples from an additional year yielded outcomes comparable to the established state of the art, suggesting the potential for continued enhancement of yield prediction systems with ongoing data collection efforts.
- Hypothesis 3: Integrating satellite imagery and vegetation indices into convolutional neural networks (CNNs) offers a promising avenue for achieving precise grain classification within agricultural fields.Satisfactory outcomes were achieved through various crop classification models utilising multi-spectral satellite images, particularly when data were tailored to field-specific formats. While temporal analysis of vegetation indices provided valuable insights into crop type development, the indices proved inadequate for direct crop classification.
- Hypothesis 4: Multi-class attention-based deep multiple-instance learning (MAD-MIL) can potentially leverage entire field datasets, thereby augmenting crop classification accuracy.Implementing multi-class attention-based deep multiple-instance learning (MAD-MIL) demonstrated enhanced suitability and accuracy in crop classification tasks leveraging semi-labelled field datasets. Despite inconclusive attention weight analyses, the MAD-MIL model yielded comparable performance metrics, indicating its efficacy in crop classification scenarios.
- Hypothesis 5: In-season early yield predictions maintain their efficacy when utilising predicted crop types based solely on the available data up to the prediction time.Successful classification of crop types during the growing season facilitated the creation of field masks and growing area estimates, enabling the integration of predicted crop types into early yield prediction models. Subsequent evaluations demonstrated satisfactory performance compared to previous methodologies, highlighting the viability of realistic in-season early yield predictions for real-world applications.
5.1. Research Contributions
- Enhancement of the existing system for predicting grain yield and monitoring on Norwegian farms, demonstrating its potential for continuous improvement over successive seasons.
- Development of methodologies for classifying and mapping grain types within Norwegian fields, particularly catering to semi-labelled field datasets.
- Creation of an accurate, practical, and implementable system for forecasting grain yields on Norwegian farms throughout the growing season.
- Identification of available data sources pertinent to growth factors in Norwegian agriculture while contextualising them within the theories of growth factors and precision agriculture. A notable limitation is the need for more data acquisition related to farms’ activities.
5.2. Future Work
- Removing noise and disturbance from remote sensing: Developing an AI model for automatically identifying and mitigating noise in satellite images is recommended. Improving image quality by removing noise and potentially up-scaling resolutions holds promise for advancing precision agriculture in Norway.
- Adding additional features for yield prediction: Proposed enhancements for early yield predictions include incorporating additional data sources such as sowing area and subsidies received as historical features. Additionally, efforts should be made to predict weather features removed during yield prediction and explore the correlation of various growth factors, such as farming activities and irrigation, with yields.
- Acquiring more accurate field boundaries: The suggested work on accurate field boundary detection involves creating a training dataset for a machine learning model to detect boundaries in satellite images. When integrated with functions for acquiring new satellite images and removing noise, this technique could establish a framework for developing and pre-processing images.
- Collaboration with government agencies: Addressing the limited availability of data related to growth factors necessitates closer collaboration with stakeholders in Norwegian agriculture. Working with entities such as Felleskjøpet, NIBIO, and the Department of Agriculture can facilitate projects to collect more agricultural data. For instance, developing an AI model for farmers to track field disposal and activities could not only enhance the research conducted but also create new opportunities for experimentation and improvement in agricultural practices. This avenue of research is recommended for those seeking to advance the current state of the art in crop production optimisation and monitoring within Norway.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ragnar, E.; Audun, K.; Olav, N. A comparison of environmental, soil fertility, yield, and economical effects in six cropping systems based on an 8-year experiment in Norway. Agric. Ecosyst. Environ. 2002, 90, 155–168. [Google Scholar] [CrossRef]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Klaus, G.G. Food quality and safety: Consumer perception and demand. Eur. Rev. Agric. Econ. 2005, 32, 369–391. [Google Scholar] [CrossRef]
- Sharma, S.; Rai, S.; Krishnan, N.C. Wheat Crop Yield Prediction Using Deep LSTM Model. arXiv 2020, arXiv:2011.01498. [Google Scholar]
- You, J.; Li, X.; Low, M.; Lobell, D.; Ermon, S. Deep Gaussian Process for Crop Yield Prediction Based on Remote Sensing Data. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Russello, H.; Shang, W. Convolutional Neural Networks for Crop Yield Prediction using Satellite Images. Ibm Cent. Adv. Stud. 2018. Available online: https://api.semanticscholar.org/CorpusID:51786849 (accessed on 7 May 2024).
- Engen, M.; Sandø, E.; Sjølander, B.L.O.; Arenberg, S.; Gupta, R.; Goodwin, M. Farm-Scale Crop Yield Prediction from Multi-Temporal Data Using Deep Hybrid Neural Networks. Agronomy 2021, 11, 2576. [Google Scholar] [CrossRef]
- Gupta, R.; Engen, M.; Sandø, E.; Sjølander, B.L.O.; Arenberg, S.; Goodwin, M. Implementation of Neural Networks to Predict Crop Yield Production in Norwegian Agriculture. Int. Conf. Mach. Learn. Data Min. 2022, 58, 1–15. [Google Scholar]
- Statistics Norway, Holdings, Agricultural Area and Livestock. Available online: https://www.ssb.no/en/jord-skog-jakt-og-fiskeri/jordbruk/statistikk/gardsbruk-jordbruksareal-og-husdyr (accessed on 1 May 2024).
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. arXiv 2018, arXiv:1807.11809. [Google Scholar] [CrossRef]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep Learning Classification of Land Cover and Crop Types Using Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Ji, S.; Zhang, C.; Xu, A.; Shi, Y.; Duan, Y. 3D Convolutional Neural Networks for Crop Classification with Multi-Temporal Remote Sensing Images. Remote. Sens. 2018, 10, 75. [Google Scholar] [CrossRef]
- Foerster, S.; Kaden, K.; Foerster, M.; Itzerott, S. Crop type mapping using spectral-temporal profiles and phenological information. Comput. Electron. Agric. 2012, 89, 30–40. [Google Scholar] [CrossRef]
- Hu, Q.; Yin, H.; Friedl, M.A.; You, L.; Li, Z.; Tang, H.; Wu, W. Integrating coarse-resolution images and agricultural statistics to generate sub-pixel crop type maps and reconciled area estimates. Remote Sens. Environ. 2021, 258, 112365. [Google Scholar] [CrossRef]
- Wen, F.; Zhang, Y.; Gao, Z.; Ling, X. Two-Pass Robust Component Analysis for Cloud Removal in Satellite Image Sequence. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1090–1094. [Google Scholar] [CrossRef]
- Kvande, M.A.; Jacobsen, S.L. Hybrid Neural Networks with Attention-Based Multiple Instance Learning for Improved Grain Identification and Grain Yield Predictions. Master´s Thesis, University of Agder, Grimstad, Norway, 2022. [Google Scholar]
- Whelan, B.; Taylor, J. Precision Agriculture for Grain Production Systems; Csiro Publishing: Clayton, VIC, Australia, 2013. [Google Scholar] [CrossRef]
- Halland, H.; Thomsen, M.; Dalmannsdottir, S. Dyrking og Bruk av Korn i Nord-Norge, Kunnskap Fra Det Nord-Atlantiske Prosjektet Northern Cereals 2015–2018; Norsk institutt for bioøkonomi: Tromsø, Norway, 2018; 39p. [Google Scholar]
- VanDerZanden, A.M. Environmental Factors Affecting Plant Growth, Oregon State University. 2008. Available online: https://extension.oregonstate.edu/gardening/techniques/environmental-factorsaffecting-plant-growth (accessed on 1 May 2024).
- Johnson, D.M. An assessment of pre- and within-season remotely sensed variables for forecasting corn and soybean yields in the United States. Remote Sens. Environ. 2014, 141, 116–128. [Google Scholar] [CrossRef]
- Bhatla, S.C.; Lal, M.A. Plant Physiology, Development and Metabolism; Springer: Singapore, 2018. [Google Scholar] [CrossRef]
- Kukal, M.S.; Irmak, S. Climate-Driven Crop Yield and Yield Variability and Climate Change Impacts on the U.S. Great Plains Agricultural Production. Sci. Rep. 2018, 8, 3450. [Google Scholar] [CrossRef] [PubMed]
- Shah, W.A.; Bakht, J.; Ullah, T.; Khan, A.W.; Zubair, M.; Khakwani, A.A. Effect of Sowing Dates on the Yield and Yield Components of Different Wheat Varieties. J. Agron. 2006, 5, 106–110. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- Verena, H.; Gunther, K.; Christian, G.; Christopher, S. Indices for Sentinel-2A. Available online: https://www.indexdatabase.de/db/is.php?sensor_id=96 (accessed on 11 May 2022).
- Colwell, R.N. Manual of Remote Sensing, 2nd ed.; U.S. Department of Energy Office of Scientific and Technical Information: Oak Ridge, TN, USA, 1985. Available online: https://www.osti.gov/biblio/5772892 (accessed on 3 May 2024).
- Castillejo-González, I.L.; López-Granados, F.; García-Ferrer, A.; Peñá-Barragán, J.M.; Jurado-Expósito, M.; de la Orden, M.S.; González-Audícana, M. Object- and pixel-based analysis for mapping crops and their agro-environmental associated measures using QuickBird imagery. Comput. Electron. Agric. 2009, 68, 207–215. [Google Scholar] [CrossRef]
- Shen, H.; Li, X.; Cheng, Q.; Zeng, C.; Yang, G.; Li, H.; Zhang, L. Missing Information Reconstruction of Remote Sensing Data: A Technical Review. IEEE Geosci. Remote Sens. Mag. 2015, 3, 61–85. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Ju, J.; Roy, D.P. The Availability of Cloud-free Landsat ETM+ Data Over the Conterminous U.S. and Globally. J. Remote Sens. Environ. 2018, 112, 1196–1211. [Google Scholar] [CrossRef]
- Skakun, S.; Basarab, R. Reconstruction of Missing Data in Time-Series of Optical Satellite Images Using Self-Organizing Kohonen Maps. J. Autom. Inf. Sci. 2014, 46, 19–26. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Li, J.; Li, Z.; Shen, H.; Zhang, L. Thick cloud and cloud shadow removal in multitemporal imagery using progressively spatio-temporal patch group deep learning. Isprs J. Photogramm. Remote Sens. 2020, 162, 148–160. [Google Scholar] [CrossRef]
- Lin, C.; Tsai, P.H.; Lai, K.; Chen, J.Y. Cloud Removal From Multitemporal Satellite Images Using Information Cloning. IEEE Trans. Geosci. Remote Sens. 2013, 51, 232–241. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Zeng, C.; Li, X.; Wei, Y. Missing Data Reconstruction in Remote Sensing Image With a Unified Spatial–Temporal–Spectral Deep Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4274–4288. [Google Scholar] [CrossRef]
- Bannari, A.; Morin, D.; Bonn, F.J.; Huete, A.R. A review of vegetation indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Huete, A.R.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Pearson, R.L.; Miller, L.D. Remote Mapping of Standing Crop Biomass for Estimation of the Productivity of the Short-Grass Prairie; Environmental Science, Agricultural and Food Sciences; Pawnee National Grasslands: Ault, CO, USA, 1972; Available online: https://api.semanticscholar.org/CorpusID:204258424 (accessed on 1 May 2024).
- Xiao, X.; Boles, S.; Frolking, S.; Li, C.; Babu, J.Y.; Salas, W.A.; Moore, B. Mapping paddy rice agriculture in South and Southeast Asia using multi-temporal MODIS images. Remote Sens. Environ. 2006, 100, 95–113. [Google Scholar] [CrossRef]
- Zhong, L.; Gong, P.; Biging, G.S. Efficient corn and soybean mapping with temporal extendability: A multi-year experiment using Landsat imagery. Remote Sens. Environ. 2014, 140, 1–13. [Google Scholar] [CrossRef]
- Massey, R.; Sankey, T.T.; Congalton, R.G.; Yadav, K.; Thenkabail, P.S.; Ozdogan, M.; Meador, A.J. MODIS phenology-derived, multi-year distribution of conterminous U.S. crop types. Remote Sens. Environ. 2017, 198, 490–503. [Google Scholar] [CrossRef]
- Kobayashi, N.; Tani, H.; Wang, X.; Sonobe, R. Crop classification using spectral indices derived from Sentinel-2A imagery. J. Inf. Telecommun. 2019, 4, 67–90. [Google Scholar] [CrossRef]
- Qi, J.; Marsett, R.C.; Heilman, P.; Biedenbender, S.H.; Moran, S.; Goodrich, D.C.; Weltz, M.A. RANGES improves satellite-based information and land cover assessments in southwest United States. Eos, Trans. Am. Geophys. Union 2002, 83, 601–606. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Deering, D.W.; Schell, J.A.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation, Great Plains Corridor. 1973. Available online: https://api.semanticscholar.org/CorpusID:129198382 (accessed on 1 May 2024).
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Rasmus, F.; Inge, S. Derivation of a Shortwave Infrared Water Stress Index From MODIS Near- and Shortwave Infrared Data in a Semiarid Environment. Remote Sens. Environ. 2003, 87, 111–121. [Google Scholar] [CrossRef]
- Wang, F.; Huang, J.; Tang, Y.; Wang, X. New Vegetation Index and Its Application in Estimating Leaf Area Index of Rice. Rice Sci. 2007, 14, 195–203. [Google Scholar] [CrossRef]
- Barzin, R.; Pathak, R.; Lotfi, H.; Varco, J.J.; Bora, G.C. Use of UAS Multispectral Imagery at Different Physiological Stages for Yield Prediction and Input Resource Optimization in Corn. Remote. Sens. 2020, 12, 2392. [Google Scholar] [CrossRef]
- Chea, C.; Saengprachatanarug, K.; Posom, J.; Saikaew, K.R.; Wongphati, M.; Taira, E. Optimal models under multiple resource types for Brix content prediction in sugarcane fields using machine learning. Remote Sens. Appl. Soc. Environ. 2022, 26, 100718. [Google Scholar] [CrossRef]
- Josep, P.; Baret, F.; Iolanda, F. Semi-Empirical Indices to Assess Carotenoids/Chlorophyll-a Ratio from Leaf Spectral Reflectance. Photosynthetica 1995, 31, 221–230. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Lightle, D.T.; Raun, W.R.; Solie, J.B.; Johnson, G.V.; Stone, M.L.; Lukina, E.V.; Thomason, W.E.; Schepers, J.S. In-Season Prediction of Potential Grain Yield in Winter Wheat Using Canopy Reflectance. Agron. J. 2001, 93, 131–138. [Google Scholar]
- Nevavuori, P.; Narra, N.G.; Lipping, T. Crop yield prediction with deep convolutional neural networks. Comput. Electron. Agric. 2019, 163, 104859. [Google Scholar] [CrossRef]
- Khaki, S.; Wang, L. Crop Yield Prediction Using Deep Neural Networks. Front. Plant Sci. 2019, 10, 452963. [Google Scholar] [CrossRef] [PubMed]
- Basnyat, B.M.; Lafond, G.P.; Moulin, A.P.; Pelcat, Y. Optimal time for remote sensing to relate to crop grain yield on the Canadian prairies. Can. J. Plant Sci. 2004, 84, 97–103. [Google Scholar]
- Hu, Q.; Wu, W.; Song, Q.; Yu, Q.; Lu, M.; Yang, P.; Tang, H.; Long, Y. Extending the Pairwise Separability Index for Multicrop Identification Using Time-Series MODIS Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6349–6361. [Google Scholar] [CrossRef]
- Qiu, B.; Lu, D.; Tang, Z.; Chen, C.; Zou, F. Automatic and adaptive paddy rice mapping using Landsat images: Case study in Songnen Plain in Northeast China. Sci. Total Environ. 2017, 598, 581–592. [Google Scholar] [CrossRef]
- Peñá-Barragán, J.M.; Ngugi, M.K.; Plant, R.E.; Six, J. Object-based crop identification using multiple vegetation indices, textural features and crop phenology. Remote Sens. Environ. 2011, 115, 1301–1316. [Google Scholar] [CrossRef]
- Dietterich, T.G.; Lathrop, R.H.; Lozano-Perez, T. Solving the Multiple Instance Problem with Axis-Parallel Rectangles. Artif. Intell. 1997, 89, 31–71. [Google Scholar] [CrossRef]
- Maron, O.T. A Framework for Multiple-Instance Learning. In Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 1997. [Google Scholar]
- Quellec, G.; Cazuguel, G.; Cochener, B.; Lamard, M. Multiple-Instance Learning for Medical Image and Video Analysis. IEEE Rev. Biomed. Eng. 2017, 10, 213–234. [Google Scholar] [CrossRef]
- Ilse, M.; Tomczak, J.M.; Welling, M. Attention-Based Deep Multiple Instance Learning. arXiv 2018. [Google Scholar] [CrossRef]
- Cheplygina, V.; Tax, D.M.; Loog, M. Multiple instance learning with bag dissimilarities. arXiv 2013. [Google Scholar] [CrossRef]
- Chen, Y.; Bi, J.; Wang, J.Z. MILES: Multiple-Instance Learning via Embedded Instance Selection. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1931–1947. [Google Scholar] [CrossRef]
- Raykar, V.; Krishnapuram, B.; Bi, J.; Dundar, M.; Rao, R. Bayesian multiple instance learning: Automatic feature selection and inductive transfer. In Proceedings of the 25th International Conference on Machine Learning, Helsinki, Finland, 5–9 July 2008; pp. 808–815. [Google Scholar] [CrossRef]
- Crown, P.H. Crop Identification in a Parkland Environment Using Aerial Photography. Can. J. Remote Sens. 1979, 5, 128–135. [Google Scholar] [CrossRef]
- Ma, H.; Jing, Y.; Huang, W.; Shi, Y.; Dong, Y.; Zhang, J.; Liu, L. Integrating Early Growth Information to Monitor Winter Wheat Powdery Mildew Using Multi-Temporal Landsat-8 Imagery. Sensors 2018, 18, 3290. [Google Scholar] [CrossRef]
- Muji, T.; Wikantika, K.; Saepuloh, A.; Harsolumakso, A. Selection of vegetation indices for mapping the sugarcane condition around the oil and gas field of North West Java Basin, Indonesia. Iop Conf. Ser. Earth Environ. Sci. 2018, 149, 012001. [Google Scholar] [CrossRef]
- Metternicht, G. Vegetation indices derived from high-resolution airborne videography for precision crop management. Int. J. Remote Sens. 2003, 24, 2855–2877. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Name | Wavelength | Bandwidth | Resolution |
|---|---|---|---|---|
| 1 | Ultra Blue Coastal Aerosol | 442.7 | 21 | 60 |
| 2 | Blue | 492.4 | 66 | 10 |
| 3 | Green | 559.8 | 36 | 10 |
| 4 | Red | 664.6 | 31 | 10 |
| 5 | Vegetation Red-Edge | 704.1 | 15 | 20 |
| 6 | Visible and Near-Infrared | 740.5 | 15 | 20 |
| 7 | Visible and Near-Infrared | 782.8 | 20 | 20 |
| 8 | Visible and Near-Infrared | 832.8 | 106 | 10 |
| 8a | Visible and Near-Infrared | 864.7 | 21 | 20 |
| 9 | Water Vapour | 945.1 | 20 | 60 |
| 11 | Shortwave Infrared | 1613.7 | 91 | 20 |
| 12 | Shortwave Infrared | 2202.4 | 175 | 20 |
| Baseline Approach | Validation Loss | MAE (kg/1000 m2) |
|---|---|---|
| Baseline DNN | 0.90 | 83.85 |
| New Features to Optimised DNN | 0.82 | 83.28 |
| New Data Samples to Optimised DNN | 0.84 | 82.82 |
| Integrated Features and Data to Optimised DNN | 0.83 | 82.60 |
| Best-Performing Approaches | Validation Loss | MAE (kg/1000 m2) |
|---|---|---|
| Integrated Features and Data to Optimised DNN | 0.83 | 82.60 |
| New Features to Hybrid CNN | 0.79 | 78.96 |
| No. | Vegetation Indices | Model | Crop Types | Week Interval | Val Loss | Val Accuracy |
|---|---|---|---|---|---|---|
| 1. | All | Initial | Five Types | 15–30 | 0.8910 | 0.6423 |
| 2. | All | Initial | All Types | 15–30 | 0.9745 | 0.6330 |
| 3. | All | Optimized | Five Types | 10–39 | 0.9222 | 0.6366 |
| 4. | All | Optimized | Five Types | 30–39 | 0.9247 | 0.6353 |
| 5. | Optimal | Initial | Five Types | 19–24 | 0.9498 | 0.6359 |
| 6. | Optimal | Optimized | Five Types | 19–24 | 0.9520 | 0.6353 |
| Crop Type | Metric | 100 Bags | 200 Bags | 300 Bags | 500 Bags | 750 Bags |
|---|---|---|---|---|---|---|
| Barley | Accuracy | 0.73 | 0.62 | 0.66 | 0.64 | 0.74 |
| Barley | Loss | 0.67 | 0.64 | 0.62 | 0.61 | 0.60 |
| Wheat | Accuracy | 0.71 | 0.70 | 0.73 | 0.67 | 0.68 |
| Wheat | Loss | 0.65 | 0.95 | 0.64 | 0.62 | 0.67 |
| Oat | Accuracy | 0.56 | 0.59 | 0.60 | 0.63 | 0.60 |
| Oat | Loss | 0.71 | 0.69 | 0.68 | 0.68 | 0.67 |
| Rye | Accuracy | 0.96 | 0.97 | 0.98 | 0.99 | 0.99 |
| Rye | Loss | 0.37 | 0.47 | 0.45 | 0.48 | 0.48 |
| Rye Wheat | Accuracy | 0.96 | 0.97 | 0.98 | 0.99 | 0.97 |
| Rye Wheat | Loss | 0.21 | 0.15 | 0.60 | 0.09 | 0.21 |
| Input | Description | Previous MAE | Achieved MAE (kg/1000 m2) | Change |
|---|---|---|---|---|
| Weeks 10–39 | Full season | 76.27 | 78.96 | 3.53% |
| Weeks 10–26 | Late June | 82.11 | 89.77 | −9.33% |
| Weeks 10–21 | Mid-May | 92.20 | 93.45 | −1.35% |
| Metric | Yield Prediction | Hybrid Yield Prediction | Early Yield Prediction | |
| Loss (MAE) | 82.1 kg/daa | 78.96 kg/daa | 89.77 kg/daa | |
| Metric | Farm-Scale | Field-Scale | Vegetation Indices | MAD-MIL Classification |
| Accuracy | 0.60 | 0.70 | 0.64 | 0.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kvande, M.A.; Jacobsen, S.L.; Goodwin, M.; Gupta, R. Using AI to Empower Norwegian Agriculture: Attention-Based Multiple-Instance Learning Implementation. Agronomy 2024, 14, 1089. https://doi.org/10.3390/agronomy14061089
Kvande MA, Jacobsen SL, Goodwin M, Gupta R. Using AI to Empower Norwegian Agriculture: Attention-Based Multiple-Instance Learning Implementation. Agronomy. 2024; 14(6):1089. https://doi.org/10.3390/agronomy14061089
Chicago/Turabian StyleKvande, Mikkel Andreas, Sigurd Løite Jacobsen, Morten Goodwin, and Rashmi Gupta. 2024. "Using AI to Empower Norwegian Agriculture: Attention-Based Multiple-Instance Learning Implementation" Agronomy 14, no. 6: 1089. https://doi.org/10.3390/agronomy14061089
APA StyleKvande, M. A., Jacobsen, S. L., Goodwin, M., & Gupta, R. (2024). Using AI to Empower Norwegian Agriculture: Attention-Based Multiple-Instance Learning Implementation. Agronomy, 14(6), 1089. https://doi.org/10.3390/agronomy14061089