
UAVs to Monitor and Manage Sugarcane: Integrative Review

 ,
, 
 ,
, 

Abstract
:1. Introduction
2. Methodology
2.1. Data Source and Search Strategy
2.2. Quantitative and Quality Analysis
3. Results
3.1. Progress of Literature: Research and Innovation
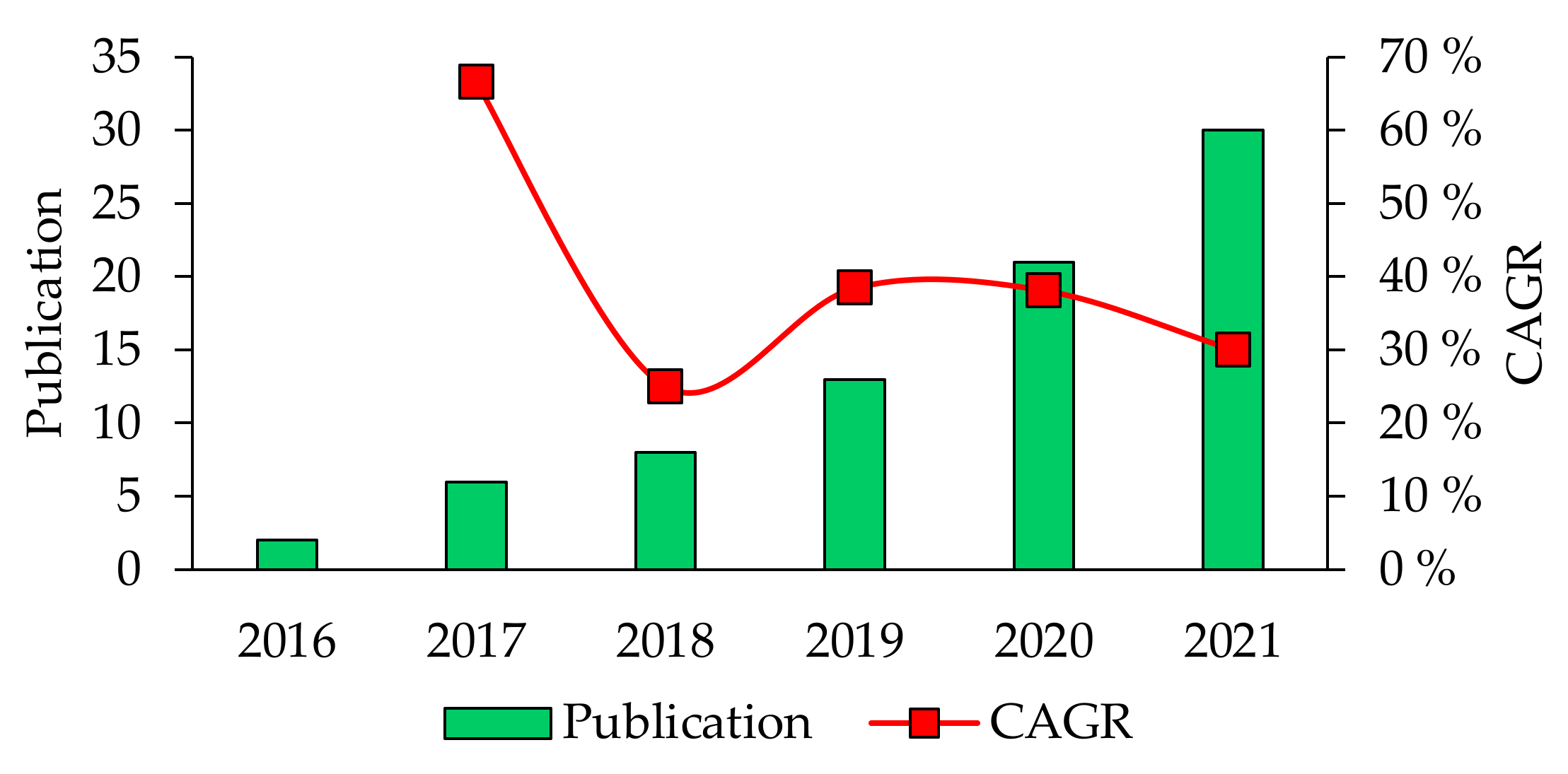
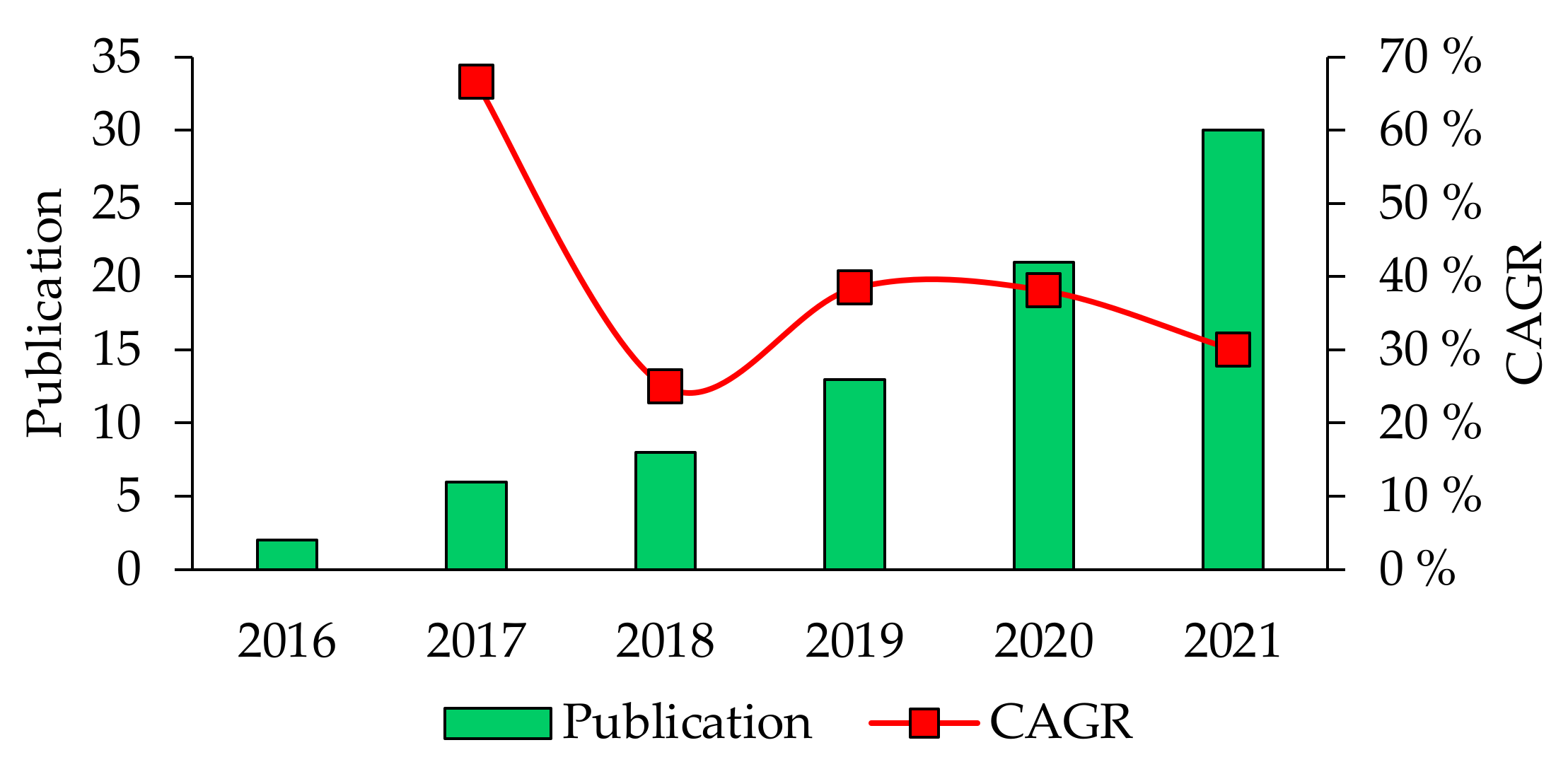
3.1.1. Historical Evolution of Publications and CAGR
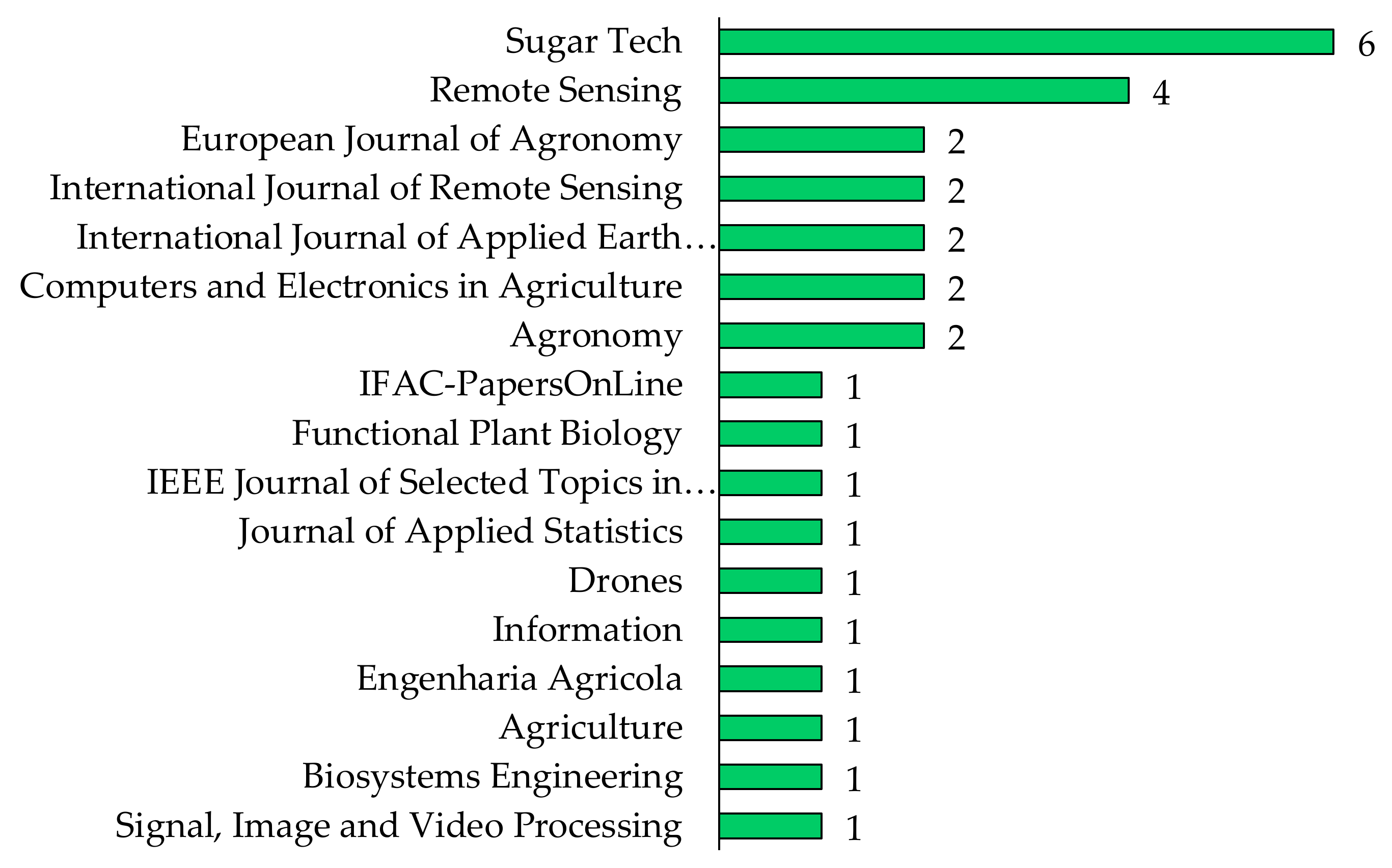
3.1.2. Most Active Sources
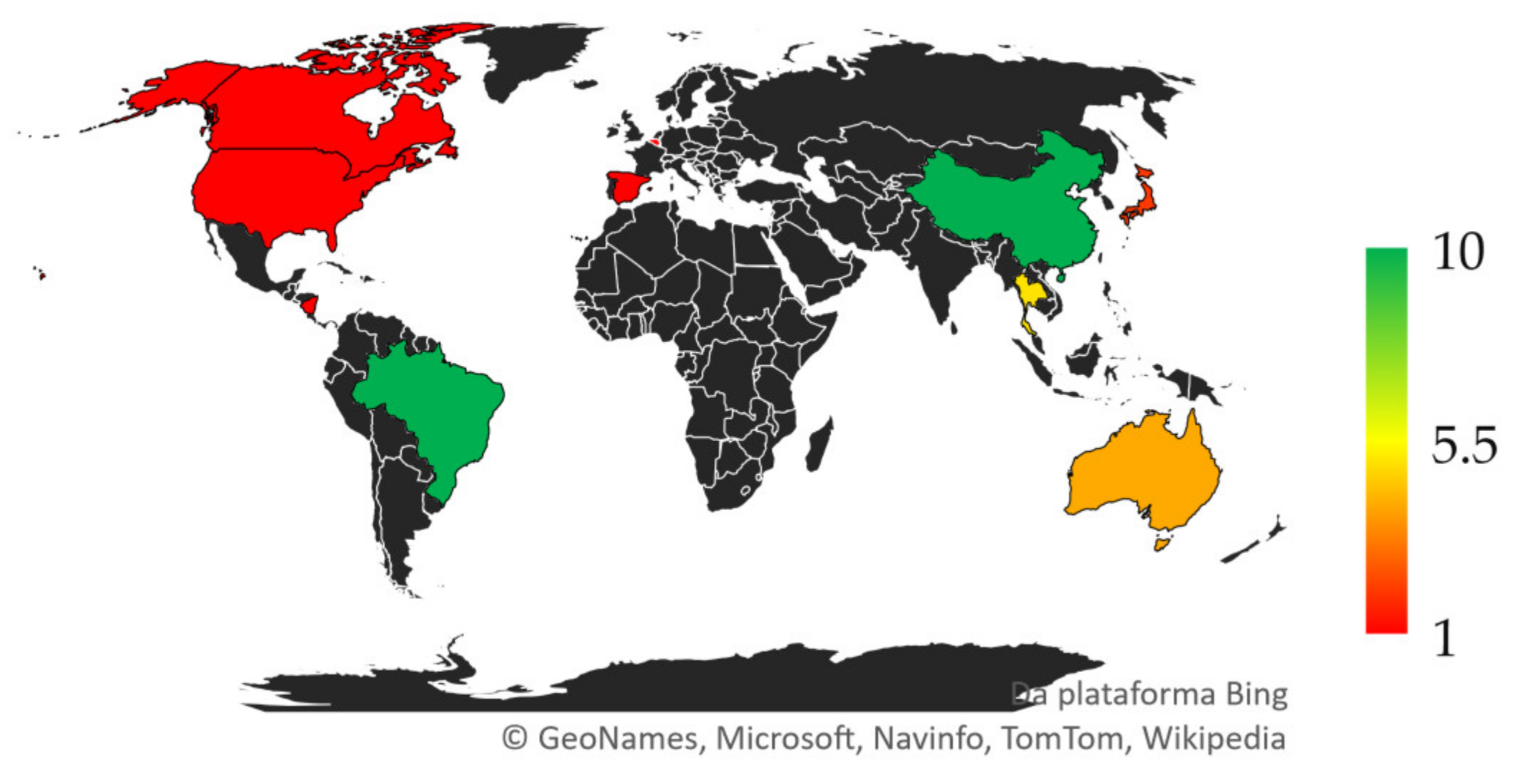
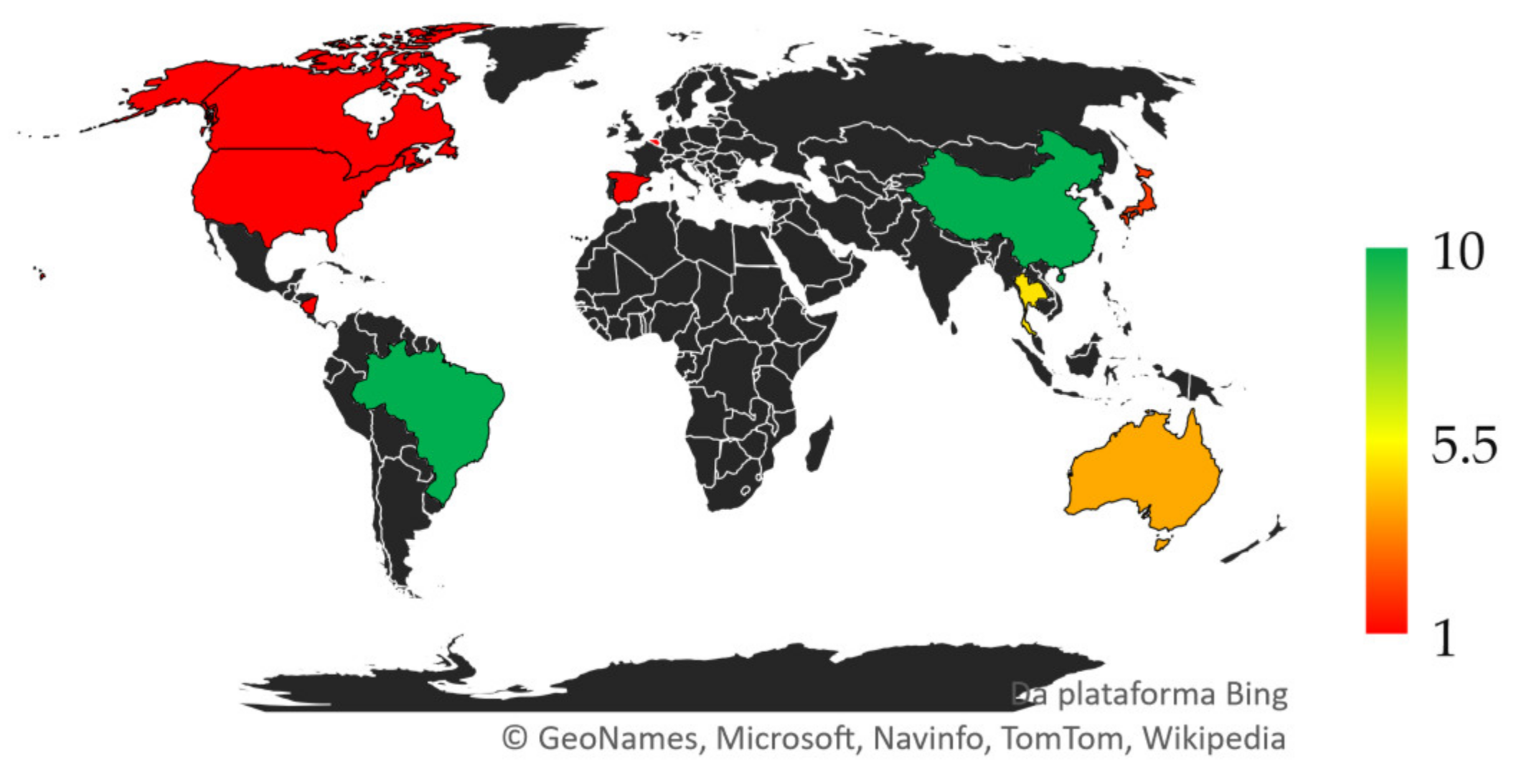
3.1.3. Most Active Countries
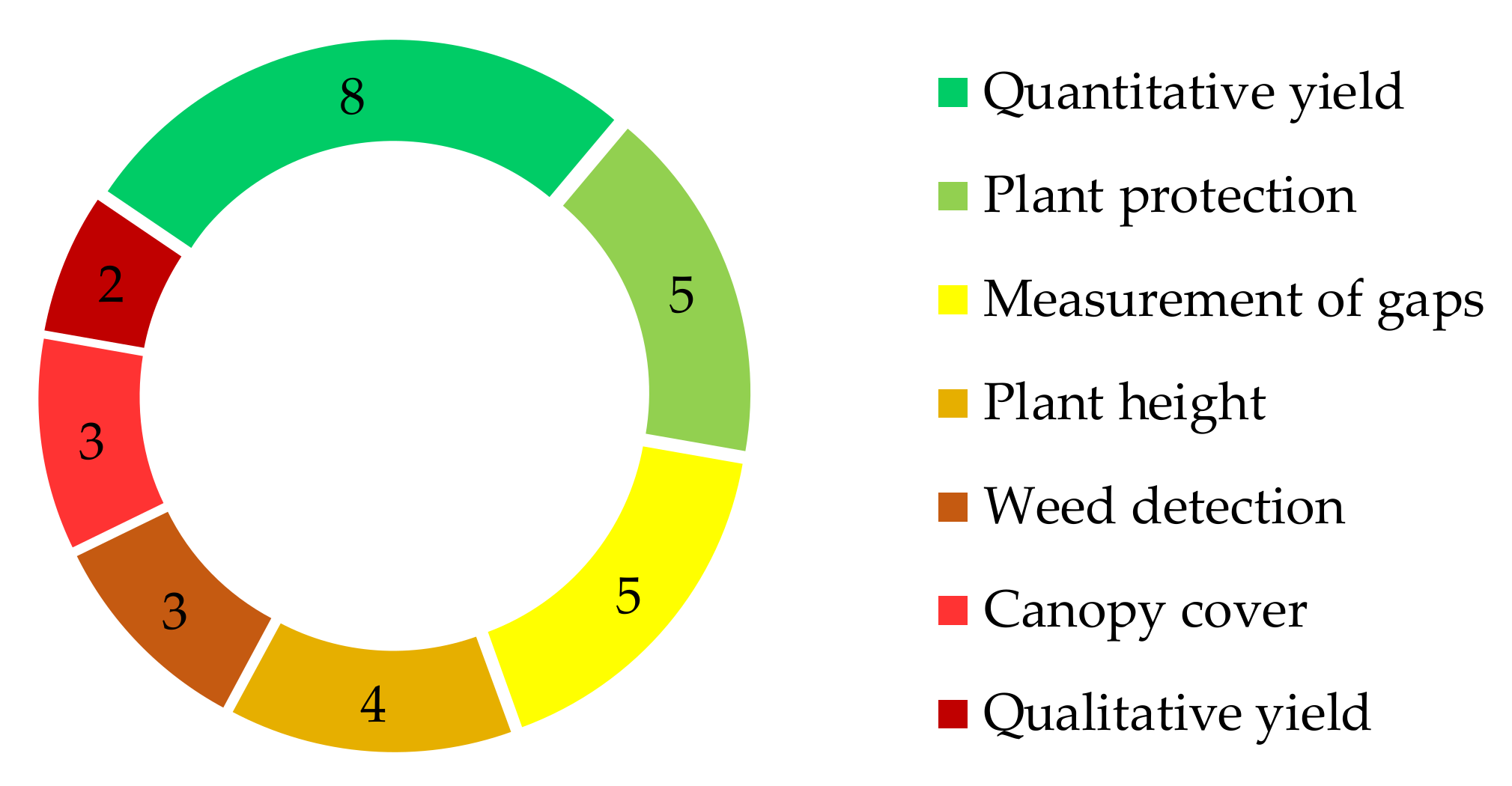
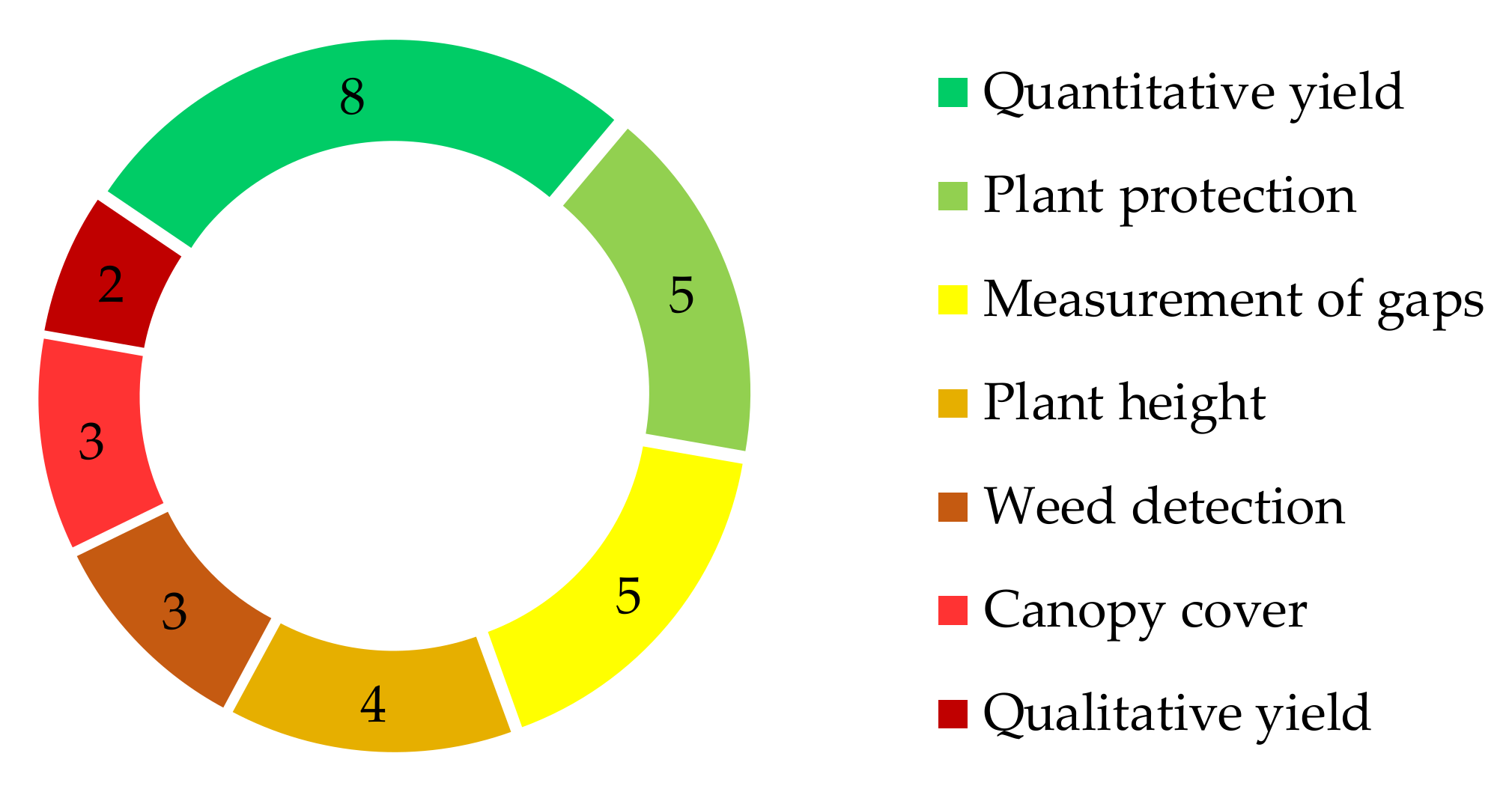
3.1.4. Most Active Subjects
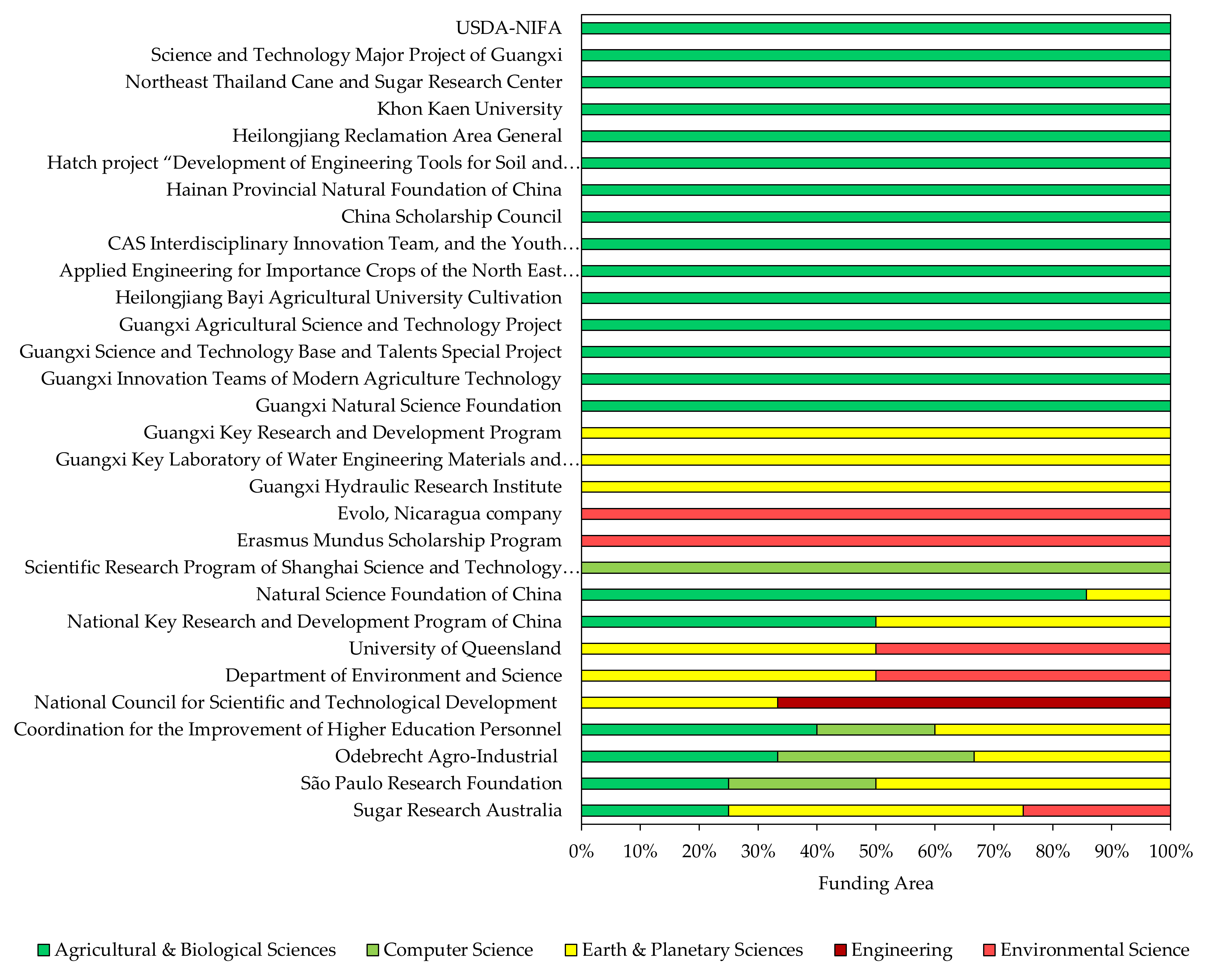
3.1.5. Most Active Sponsors and Funding-Absorbing Areas
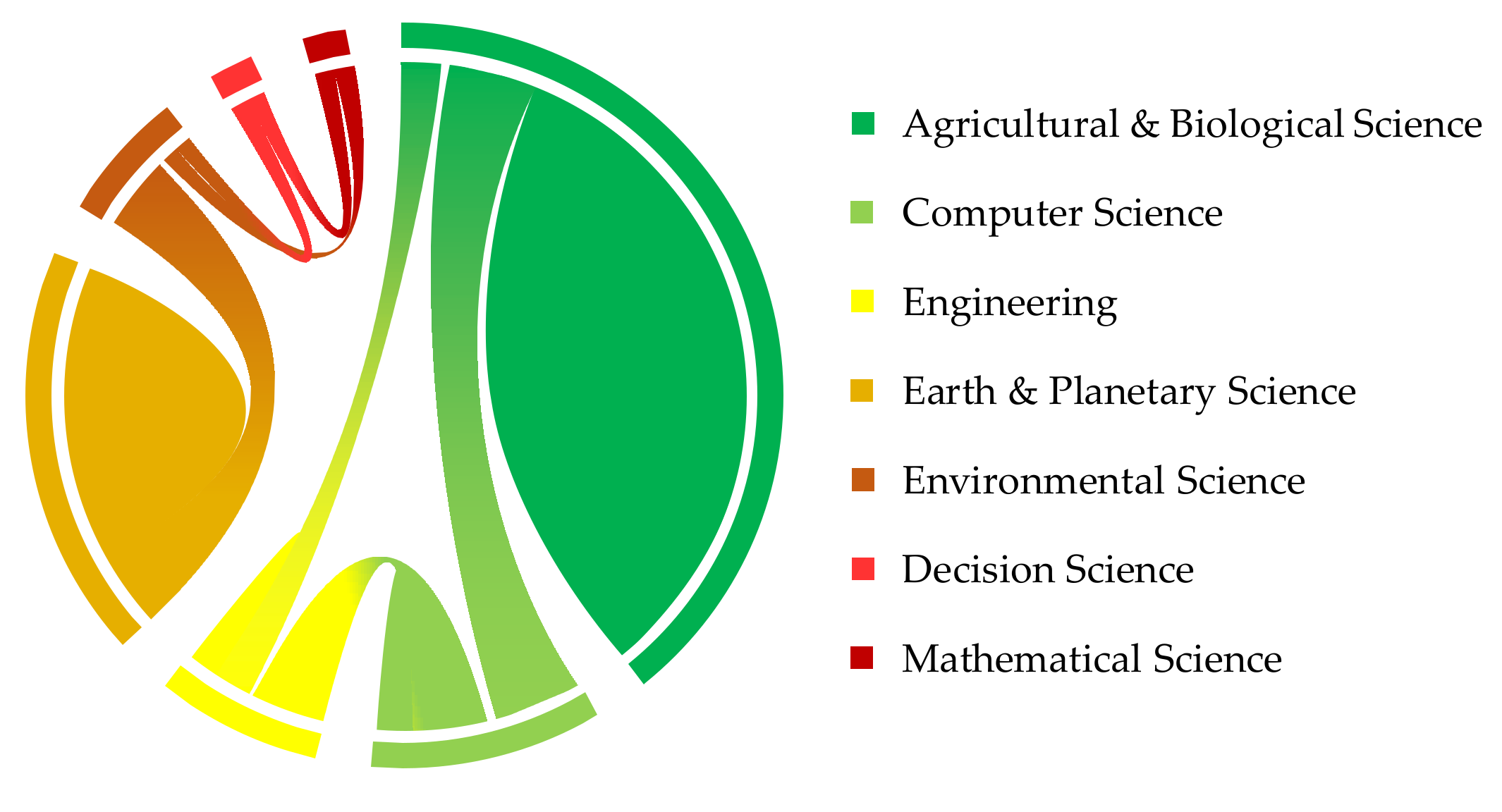
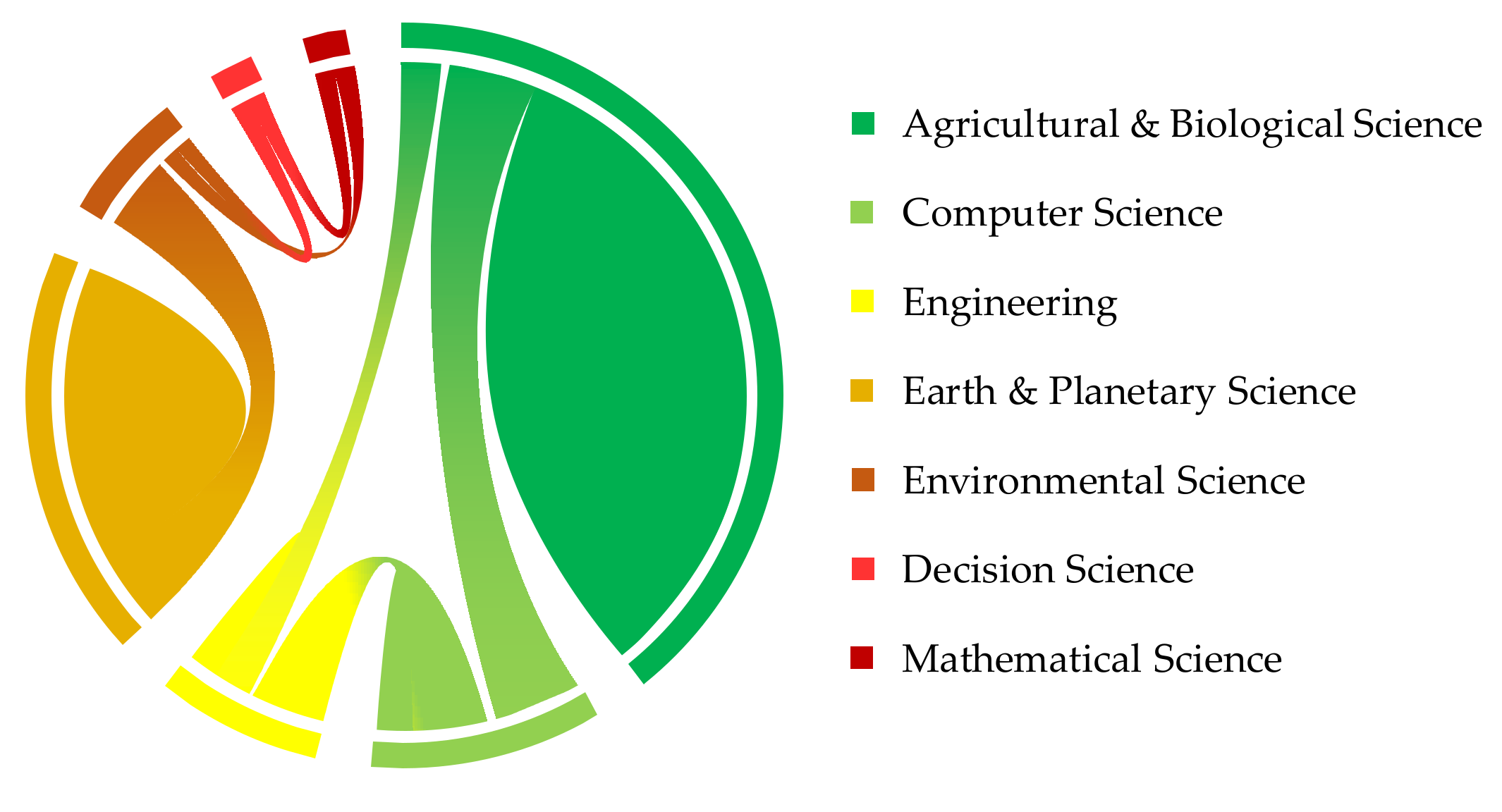
3.1.6. Transdisciplinarity of Research
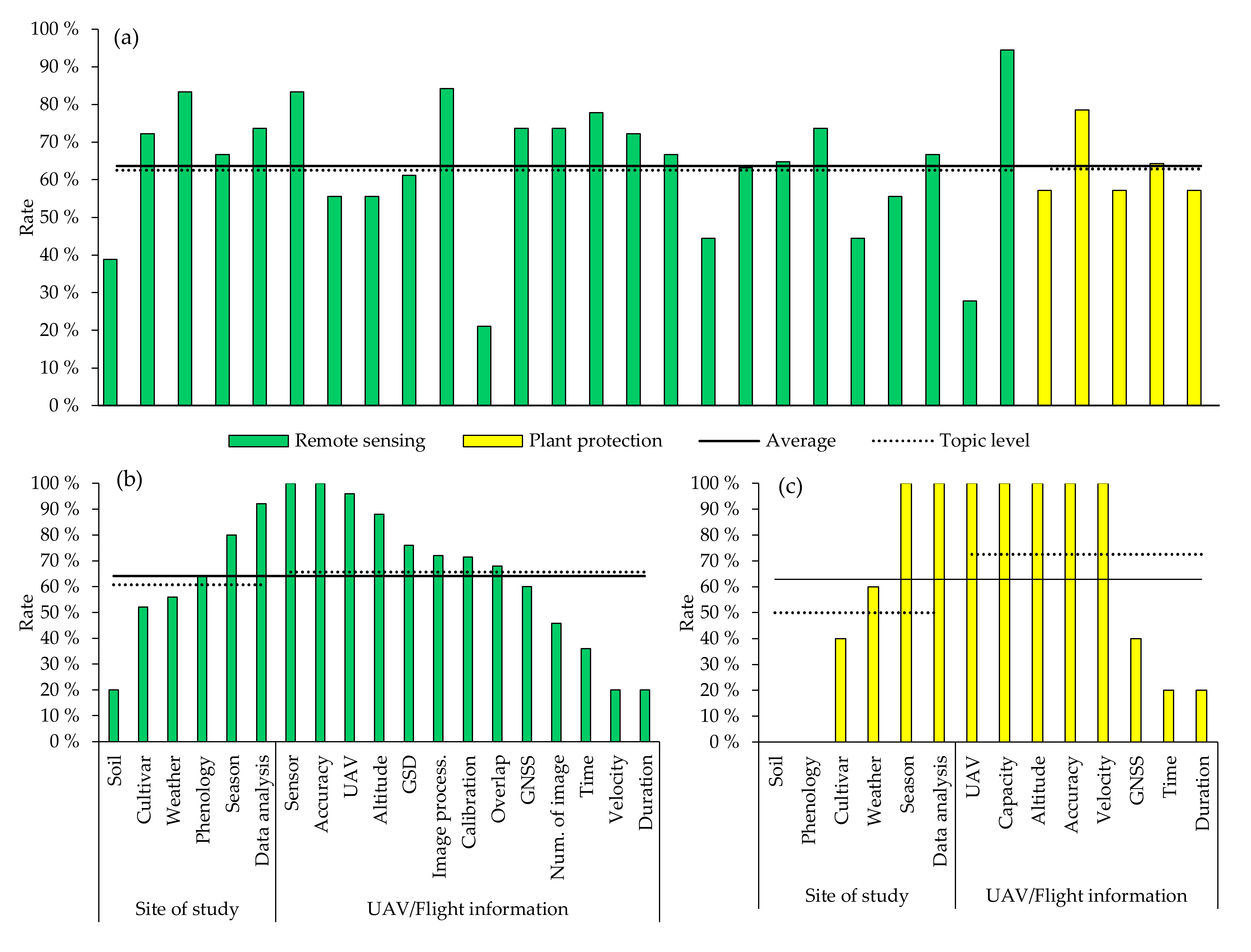
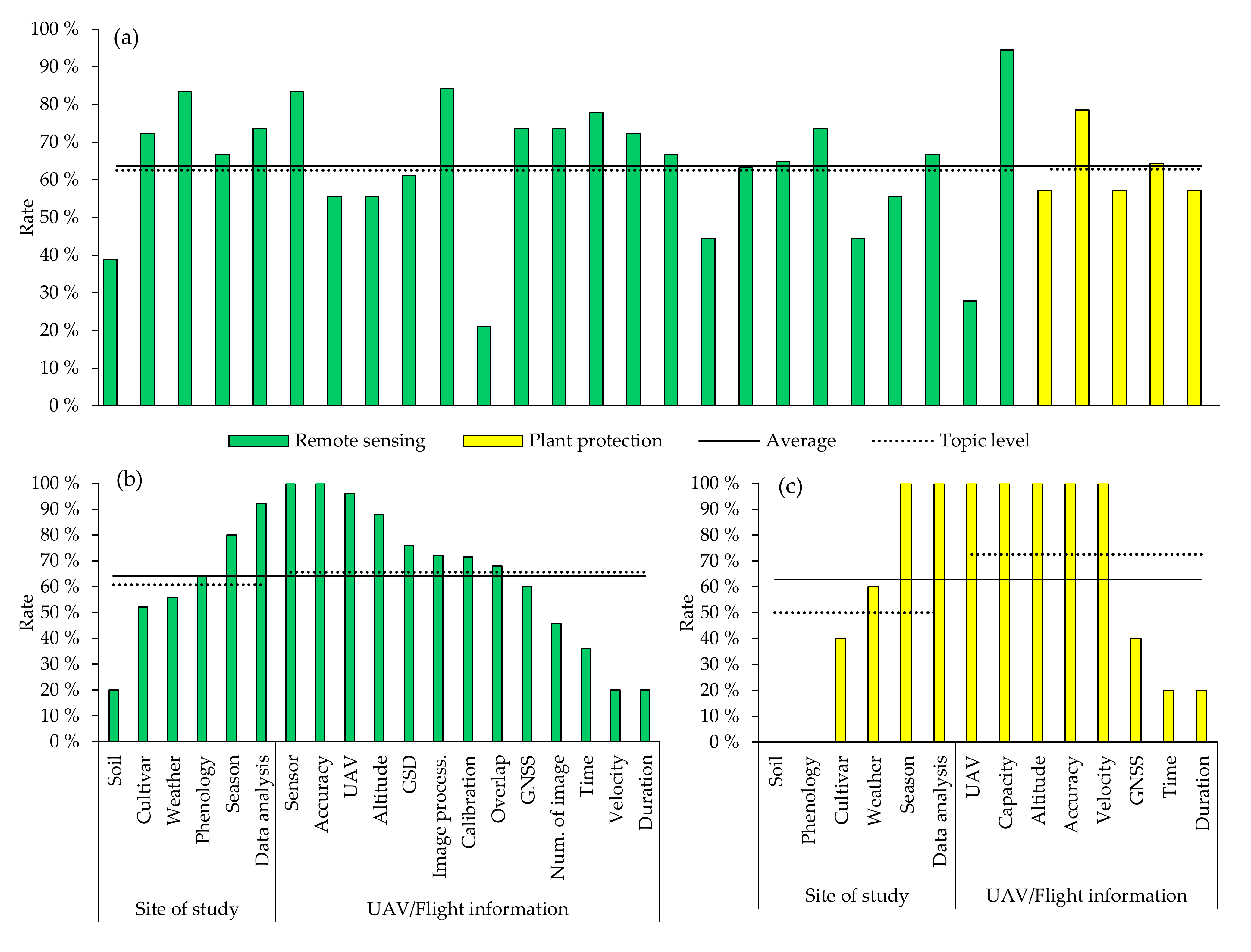
3.2. Overall Quality of Research
3.3. Meta-Analytical Insights into Top Scoring Studies
4. Discussion
4.1. Insights into Scholarly Ramifications of our Integrative Review on UAVs for Sugarcane
4.2. Limitations and the Ways Forward
4.2.1. Techno–Economic and Autonomy
4.2.2. Phenotype–Environmental
4.2.3. Social–Ethical–Political
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CAGR | compound annual growth rate |
| FWCI | field-weighted citation impact |
| GCPs | ground control points |
| GNSS | global navigation satellite systems |
| GSD | ground sample distance |
| RPA | remotely piloted aircraft |
| RPAS | remotely piloted aircraft system |
| RPV | remotely piloted vehicle |
| RTK | real-time kinematic |
| UAS | unmanned aerial system |
| UAV | unmanned aerial vehicle |
References
- Huang, J.; Khan, M.T.; Perecin, D.; Coelho, S.T.; Zhang, M. Sugarcane for Bioethanol Production: Potential of Bagasse in Chinese Perspective. Renew. Sustain. Energy Rev. 2020, 133, 110296. [Google Scholar] [CrossRef]
- Waclawovsky, A.J.; Sato, P.M.; Lembke, C.G.; Moore, P.H.; Souza, G.M. Sugarcane for Bioenergy Production: An Assessment of Yield and Regulation of Sucrose Content. Plant Biotechnol. J. 2010, 8, 263–276. [Google Scholar] [CrossRef] [Green Version]
- Molijn, R.A.; Iannini, L.; Rocha, J.V.; Hanssen, R.F. Data Descriptor: Ground Reference Data for Sugarcane Biomass Estimation in São Paulo State, Brazil. Sci. Data 2018, 5, 1–18. [Google Scholar] [CrossRef]
- Sofonia, J.; Shendryk, Y.; Phinn, S.; Roelfsema, C.; Kendoul, F.; Skocaj, D. Monitoring Sugarcane Growth Response to Varying Nitrogen Application Rates: A Comparison of UAV SLAM LiDAR and Photogrammetry. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101878. [Google Scholar] [CrossRef]
- Shendryk, Y.; Sofonia, J.; Garrard, R.; Rist, Y.; Skocaj, D.; Thorburn, P. Fine-Scale Prediction of Biomass and Leaf Nitrogen Content in Sugarcane Using UAV LiDAR and Multispectral Imaging. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102177. [Google Scholar] [CrossRef]
- Mohd Daud, S.M.S.; Mohd Yusof, M.Y.P.; Heo, C.C.; Khoo, L.S.; Chainchel Singh, M.K.; Mahmood, M.S.; Nawawi, H. Applications of Drone in Disaster Management: A Scoping Review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef]
- Petrides, P.; Kolios, P.; Kyrkou, C.; Theocharides, T.; Panayiotou, C. Disaster prevention and emergency response using unmanned aerial systems. In Smart Cities in the Mediterranean; Springer: Berlin/Heidelberg, Germany, 2017; pp. 379–403. ISBN 9783319545585. [Google Scholar]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Thanu Thavasi, P.; Suriyakala, C.D. Sensors and Tracking Methods Used in Wireless Sensor Network Based Unmanned Search and Rescue System-A Review. Procedia Eng. 2012, 38, 1935–1945. [Google Scholar] [CrossRef] [Green Version]
- Van Tilburg, C. First Report of Using Portable Unmanned Aircraft Systems (Drones) for Search and Rescue. Wilderness Environ. Med. 2017, 28, 116–118. [Google Scholar] [CrossRef] [Green Version]
- Bucknell, A.; Bassindale, T. An Investigation into the Effect of Surveillance Drones on Textile Evidence at Crime Scenes. Sci. Justice 2017, 57, 373–375. [Google Scholar] [CrossRef]
- Colefax, A.P.; Butcher, P.A.; Pagendam, D.E.; Kelaher, B.P. Reliability of Marine Faunal Detections in Drone-Based Monitoring. Ocean. Coast. Manag. 2019, 174, 108–115. [Google Scholar] [CrossRef]
- Barnas, A.F.; Darby, B.J.; Vandeberg, G.S.; Rockwell, R.F.; Ellis-Felege, S.N. A Comparison of Drone Imagery and Ground-Based Methods for Estimating the Extent of Habitat Destruction by Lesser Snow Geese (Anser Caerulescens Caerulescens) in La Pérouse Bay. PLoS ONE 2019, 14, e0217049. [Google Scholar] [CrossRef] [Green Version]
- Duan, T.; Zheng, B.; Guo, W.; Ninomiya, S.; Guo, Y.; Chapman, S.C. Comparison of Ground Cover Estimates from Experiment Plots in Cotton, Sorghum and Sugarcane Based on Images and Ortho-Mosaics Captured by UAV. Funct. Plant Biol. 2017, 44, 169–183. [Google Scholar] [CrossRef]
- Sanches, G.M.; Duft, D.G.; Kölln, O.T.; dos Luciano, A.C.S.; de Castro, S.G.Q.; Okuno, F.M.; Franco, H.C.J. The Potential for RGB Images Obtained Using Unmanned Aerial Vehicle to Assess and Predict Yield in Sugarcane Fields. Int. J. Remote Sens. 2018, 39, 5402–5414. [Google Scholar] [CrossRef]
- Kefauver, S.C.; Vicente, R.; Vergara-Díaz, O.; Fernandez-Gallego, J.A.; Kerfal, S.; Lopez, A.; Melichar, J.P.E.; Serret Molins, M.D.; Araus, J.L. Comparative UAV and Field Phenotyping to Assess Yield and Nitrogen Use Efficiency in Hybrid and Conventional Barley. Front. Plant Sci. 2017, 8, 1733. [Google Scholar] [CrossRef]
- Maresma, Á.; Ariza, M.; Martínez, E.; Lloveras, J.; Martínez-Casasnovas, J.A. Analysis of Vegetation Indices to Determine Nitrogen Application and Yield Prediction in Maize (Zea Mays l.) from a Standard Uav Service. Remote Sens. 2016, 8, 973. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Zheng, H.B.; Xu, X.Q.; He, J.Y.; Ge, X.K.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.X.; Tian, Y.C. Predicting Grain Yield in Rice Using Multi-Temporal Vegetation Indices from UAV-Based Multispectral and Digital Imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 246–255. [Google Scholar] [CrossRef]
- Holman, F.H.; Riche, A.B.; Michalski, A.; Castle, M.; Wooster, M.J.; Hawkesford, M.J. High Throughput Field Phenotyping of Wheat Plant Height and Growth Rate in Field Plot Trials Using UAV Based Remote Sensing. Remote Sens. 2016, 8, 1031. [Google Scholar] [CrossRef]
- Zheng, H.; Li, W.; Jiang, J.; Liu, Y.; Cheng, T.; Tian, Y.; Zhu, Y.; Cao, W.; Zhang, Y.; Yao, X. A Comparative Assessment of Different Modeling Algorithms for Estimating Leaf Nitrogen Content in Winter Wheat Using Multispectral Images from an Unmanned Aerial Vehicle. Remote Sens. 2018, 10, 2026. [Google Scholar] [CrossRef] [Green Version]
- Puri, V.; Nayyar, A.; Raja, L. Agriculture Drones: A Modern Breakthrough in Precision Agriculture. J. Stat. Manag. Syst. 2017, 20, 507–518. [Google Scholar] [CrossRef]
- Librán-Embid, F.; Klaus, F.; Tscharntke, T.; Grass, I. Unmanned Aerial Vehicles for Biodiversity-Friendly Agricultural Landscapes-A Systematic Review. Sci. Total. Environ. 2020, 732, 139204. [Google Scholar] [CrossRef]
- Eskandari, R.; Mahdianpari, M.; Mohammadimanesh, F.; Salehi, B.; Brisco, B.; Homayouni, S. Meta-Analysis of Unmanned Aerial Vehicle (UAV) Imagery for Agro-Environmental Monitoring Using Machine Learning and Statistical Models. Remote Sens. 2020, 12, 3511. [Google Scholar] [CrossRef]
- Som-ard, J.; Atzberger, C.; Izquierdo-Verdiguier, E.; Vuolo, F.; Immitzer, M. Remote Sensing Applications in Sugarcane Cultivation: A Review. Remote. Sens. 2021, 13, 4040. [Google Scholar] [CrossRef]
- Luna, I.; Lobo, A. Mapping Crop Planting Quality in Sugarcane from UAV Imagery: A Pilot Study in Nicaragua. Remote Sens. 2016, 8, 500. [Google Scholar] [CrossRef] [Green Version]
- De Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Mapping Skips in Sugarcane Fields Using Object-Based Analysis of Unmanned Aerial Vehicle (UAV) Images. Comput. Electron. Agric. 2017, 143, 49–56. [Google Scholar] [CrossRef]
- Miphokasap, P.; Wannasiri, W. Estimations of Nitrogen Concentration in Sugarcane Using Hyperspectral Imagery. Sustainability 2018, 10, 1266. [Google Scholar] [CrossRef] [Green Version]
- Hanson, S.; Jones, A. Is There Evidence That Walking Groups Have Health Benefits? A Systematic Review and Meta-Analysis. Br. J. Sports Med. 2015, 49, 710–715. [Google Scholar] [CrossRef] [Green Version]
- Ogilvie, D.; Foster, C.E.; Rothnie, H.; Cavill, N.; Hamilton, V.; Fitzsimons, C.F.; Mutrie, N. Interventions to Promote Walking: Systematic Review. Br. Med. J. 2007, 334, 1204–1207. [Google Scholar] [CrossRef] [Green Version]
- Moriya, E.A.S.; Imai, N.N.; Tommaselli, A.M.G.; Miyoshi, G.T. Mapping Mosaic Virus in Sugarcane Based on Hyperspectral Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 740–748. [Google Scholar] [CrossRef]
- Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Height Estimation of Sugarcane Using an Unmanned Aerial System (UAS) Based on Structure from Motion (SfM) Point Clouds. Int. J. Remote Sens. 2017, 38, 2218–2230. [Google Scholar] [CrossRef]
- Natarajan, S.; Basnayake, J.; Wei, X.; Lakshmanan, P. High-Throughput Phenotyping of Indirect Traits for Early-Stage Selection in Sugarcane Breeding. Remote Sens. 2019, 11, 2952. [Google Scholar] [CrossRef] [Green Version]
- Cholula, U.; da Silva, J.A.; Marconi, T.; Thomasson, J.A.; Solorzano, J.; Enciso, J. Forecasting Yield and Lignocellulosic Composition of Energy Cane Using Unmanned Aerial Systems. Agronomy 2020, 10, 718. [Google Scholar] [CrossRef]
- Sumesh, K.C.; Ninsawat, S.; Som-ard, J. Integration of RGB-Based Vegetation Index, Crop Surface Model and Object-Based Image Analysis Approach for Sugarcane Yield Estimation Using Unmanned Aerial Vehicle. Comput. Electron. Agric. 2021, 180, 105903. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Liu, W.; Wei, B.; Xu, X. A UAV-Based Framework for Crop Lodging Assessment. Eur. J. Agron. 2021, 123, 126201. [Google Scholar] [CrossRef]
- Yu, D.; Zha, Y.; Shi, L.; Jin, X.; Hu, S.; Yang, Q.; Huang, K.; Zeng, W. Improvement of Sugarcane Yield Estimation by Assimilating UAV-Derived Plant Height Observations. Eur. J. Agron. 2020, 121, 126159. [Google Scholar] [CrossRef]
- Xu, J.X.; Ma, J.; Tang, Y.N.; Wu, W.X.; Shao, J.H.; Wu, W.B.; Wei, S.Y.; Liu, Y.F.; Wang, Y.C.; Guo, H.Q. Estimation of Sugarcane Yield Using a Machine Learning Approach Based on Uav-Lidar Data. Remote Sens. 2020, 12, 2823. [Google Scholar] [CrossRef]
- Chea, C.; Saengprachatanarug, K.; Posom, J.; Wongphati, M.; Taira, E. Sugar Yield Parameters and Fiber Prediction in Sugarcane Fields Using a Multispectral Camera Mounted on a Small Unmanned Aerial System (UAS). Sugar Tech. 2020, 22, 605–621. [Google Scholar] [CrossRef]
- Maldaner, L.F.; Molin, J.P.; Martello, M.; Tavares, T.R.; Dias, F.L.F. Identification and Measurement of Gaps within Sugarcane Rows for Site-Specific Management: Comparing Different Sensor-Based Approaches. Biosyst. Eng. 2021, 209, 64–73. [Google Scholar] [CrossRef]
- Barbosa Júnior, M.R.; Tedesco, D.; Corrêa, R.G.; Moreira, B.R.A.; Silva, R.P.; Zerbato, C. Mapping Gaps in Sugarcane by UAV RGB Imagery: The Lower and Earlier the Flight, the More Accurate. Agronomy 2021, 11, 2578. [Google Scholar] [CrossRef]
- Zhang, X.Q.; Liang, Y.J.; Qin, Z.Q.; Li, D.W.; Wei, C.Y.; Wei, J.J.; Li, Y.R.; Song, X.P. Application of Multi-Rotor Unmanned Aerial Vehicle Application in Management of Stem Borer (Lepidoptera) in Sugarcane. Sugar Tech. 2019, 21, 847–852. [Google Scholar] [CrossRef]
- Zhang, X.Q.; Song, X.P.; Liang, Y.J.; Qin, Z.Q.; Zhang, B.Q.; Wei, J.J.; Li, Y.R.; Wu, J.M. Effects of Spray Parameters of Drone on the Droplet Deposition in Sugarcane Canopy. Sugar Tech 2020, 22, 583–588. [Google Scholar] [CrossRef]
- Natutec Drone. Available online: https://www.natutecdrone.com.br/ (accessed on 6 January 2022).
- XAG-Advancing Agriculture. Available online: https://www.xa.com/en (accessed on 6 January 2022).
- Watkins, S.; Burry, J.; Mohamed, A.; Marino, M.; Prudden, S.; Fisher, A.; Kloet, N.; Jakobi, T.; Clothier, R. Ten Questions Concerning the Use of Drones in Urban Environments. Build. Environ. 2020, 167, 106458. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Mohamed, A.; Clothier, R.; Palmer, J.L.; Simic, M.; Watkins, S. Enabling Technologies for Autonomous MAV Operations. Prog. Aerosp. Sci. 2017, 91, 27–52. [Google Scholar] [CrossRef]
- Giones, F.; Brem, A. From Toys to Tools: The Co-Evolution of Technological and Entrepreneurial Developments in the Drone Industry. Bus. Horiz. 2017, 60, 875–884. [Google Scholar] [CrossRef]
- Rao, B.; Gopi, A.G.; Maione, R. The Societal Impact of Commercial Drones. Technol. Soc. 2016, 45, 83–90. [Google Scholar] [CrossRef]
- Nelson, J.; Gorichanaz, T. Trust as an Ethical Value in Emerging Technology Governance: The Case of Drone Regulation. Technol. Soc. 2019, 59, 101131. [Google Scholar] [CrossRef]
- Luppicini, R.; So, A. A Technoethical Review of Commercial Drone Use in the Context of Governance, Ethics, and Privacy. Technol. Soc. 2016, 46, 109–119. [Google Scholar] [CrossRef]
- Tremayne, M.; Clark, A. New Perspectives from The Sky: Unmanned Aerial Vehicles and Journalism. Digit. J. 2014, 2, 232–246. [Google Scholar] [CrossRef]
- Coccia, M. Sources of Technological Innovation: Radical and Incremental Innovation Problem-Driven to Support Competitive Advantage of Firms. Technol. Anal. Strateg. Manag. 2017, 29, 1048–1061. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field Name | Description | Type | |
|---|---|---|---|
| 1 | Progress of literature | Year of publication and CAGR | Numeric |
| 2 | Source | Title of journal | Alphanumeric (Text) |
| 3 | Institution | Governmental and nongovernmental organization | Alphanumeric (Text) |
| 4 | Subject | Application/purpose | Alphanumeric (Text) |
| 5 | Funding sponsor | Financing institution | Alphanumeric (Text) |
| 6 | Funding area | Field of research & development | Alphanumeric (Text) |
| Filter | Description | Scale | |
|---|---|---|---|
| 1 | Cultivar | Did authors describe the cultivar/variety? | 1: Yes; 0: No |
| 2 | Weather | Did authors describe any weather condition? | 1: Yes; 0: No |
| 3 | Soil | Did authors characterize the soil? | 1: Yes; 0: No |
| 4 | Phenology | Did authors specify phenological stage of the sugarcane? | 1: Yes; 0: No |
| 5 | Season | Did authors describe the growing season or specify the date of surveying? | 1: Yes; 0: No |
| 6 | Data analysis | Did authors describe the data analytics or error metric? | 1: Yes; 0: No |
| 7 | UAV | Did authors specify the UAV? (e.g., fixed-wing or rotor-wing) | 1: Yes; 0: No |
| 8 | Sensor a | Did authors describe the sensor? (e.g., electro optical, LiDAR, thermal etc.) | 1: Yes; 0: No |
| 9 | Capacity b | Did authors describe capacity flow of spraying? | 1: Yes; 0: No |
| 10 | Calibration a | Did authors perform the radiometric calibration? | 1: Yes; 0: No |
| 11 | Altitude | Did authors describe the altitude of flight? | 1: Yes; 0: No |
| 12 | GSD a | Did authors provide information about GDS or pixel? | 1: Yes; 0: No |
| 13 | Time | Did authors describe the time of flight? | 1: Yes; 0: No |
| 14 | Overlap a | Did authors describe the side/front overlap? | 1: Yes; 0: No |
| 15 | Number of images a | Did authors specify the number of images? | 1: Yes; 0: No |
| 16 | Image processing a | Did authors specify the software or the processing of imagery data? | 1: Yes; 0: No |
| 17 | Velocity | Did authors describe the forward speed of flying? | 1: Yes; 0: No |
| 18 | GNSS | Did authors describe the positional accuracy? (e.g., GCPs or RTK) | 1: Yes; 0: No |
| 19 | Duration | Did authors specify the duration of the mission? | 1: Yes; 0: No |
| 20 | Accuracy | Did authors describe the statistical accuracy? | 1: Yes; 0: No |
| Cultivar | Weather | Soil Type | Phenology | Season | Statistic | Ref. | ||
|---|---|---|---|---|---|---|---|---|
| Remote sensing | ||||||||
| N/A | Yes | Inceptisols, Entisols, and Vertisols | N/A | N/A | LDA, R2, RMSE, and OA | [25] | ||
| RB867515 | Yes | Rhodic Hapludox and Quartzarenic Neosol | Tillering | November 2014 | SLR, R2, ME, RMSE, and dr | [26] | ||
| N/A | N/A | N/A | Early and mid vegetative | January 2015 September 2015 | R2 | [14] | ||
| N/A | Yes | N/A | N/A | May 2015 | Kappa | [30] | ||
| RB867515 | Yes | N/A | Maturity | July 2015 | ME, RMSE, and MAPE | [31] | ||
| Q208 | Yes | N/A | All stage | 2017–2018 | R2 and RMSE | [4] | ||
| N/A | N/A | N/A | Early stage | 2016–2018 | ANOVA, ANCOVA, and PCA | [32] | ||
| N/A | Yes | N/A | Elogation and maturity | 2018 | R2 | [33] | ||
| KK3 | Yes | N/A | Maturity | January 2018 | OA, Kappa, Person’s, r, ME, MAPE, RMSE, and R2 | [34] | ||
| N/A | Yes | Latosolic Red Soil | N/A | September 2018 | OA and Kappa | [35] | ||
| Liucheng-05136 | Yes | N/A | Tillering, elongation, and maturity | 2016–2017 | R2, RMSE, MD, and RE | [36] | ||
| N/A | Yes | N/A | Maturity | November 2019 | RMSE and R2 | [37] | ||
| KK3, K88-92, UT84-12 | N/A | N/A | Maturity | November 2018 January 2019 | ANCOVA | [38] | ||
| RB966928 | N/A | N/A | Tillering | 2017–2018 | RMSE | [39] | ||
| CTC-4 | Yes | Oxisol | Tillering | September 2019 | MAE and R2 | [40] | ||
| Plant protection | ||||||||
| GT46 | Yes | N/A | N/A | April 2018 | CV | [41] | ||
| GT42 | N/A | N/A | N/A | October 2018 | CV | [42] | ||
| UAV | Sensor | Capacity | Calibration | Altitude | GSD | Time | Overlap | Ref. |
| Remote sensing | ||||||||
| Fixed wing | RGB | N/A | N/A | 190 m | 4.7 cm | N/A | 90% front 50% side | [25] |
| Fixed wing | RGNIR | N/A | N/A | 150–200 m | 10 cm | N/A | 75% front 70% side | [26] |
| Multirotor | RGB | N/A | N/A | 50 m | 1.17 cm 1.14 cm | N/A | 70% front 80% side | [14] |
| Multirotor | Hyperspectral | N/A | Yes | 160 m | 11 cm | 11:50 | 60% front 30% side | [30] |
| Fixed wing | RGB | N/A | N/A | 200 m | 10.6 cm | 14:15 and 15:00 | 75% front 70% side | [31] |
| Multirotor | LiDAR Multispectral RGB | N/A | Yes | 30 and 40 m | 2–2.7 cm | 12:00 | N/A | [4] |
| Multirotor | Multispectral RGB Thermal | N/A | Yes | 60, 80, and 100 m | 3.00, 4.07, and 10.25 cm | 9:00–15:00 | 80% front 80% side | [32] |
| Multirotor | RGB Multispectral | N/A | Yes | 20 and 30 m | 4.8 cm | 10:00–14:00 | 80% front 80% side | [33] |
| Multirotor | RGB | N/A | N/A | 50 m | 2 cm | N/A | 80% front 80% side | [34] |
| Multirotor | RGB | N/A | N/A | 200 m | 90 cm | N/A | 70% front 70% side | [35] |
| Multirotor | RGB | N/A | N/A | 50 m | N/A | N/A | > 80% | [36] |
| Multirotor | LiDAR | N/A | N/A | 100 m | N/A | N/A | 30% | [37] |
| Multirotor | Multispectral | N/A | N/A | 73 m | 5 | 12:00–3:00 | 80% front 80% side | [38] |
| Multirotor | RGB | N/A | N/A | 70 m | 3 cm | N/A | 75% front 65% side | [39] |
| Multirotor | RGB | N/A | N/A | 80, 150, and 200 m | 3.5, 6.0, and 8.2 cm | 12:00 | 75% front 70% side | [40] |
| Plant protection | ||||||||
| Multirotor | N/A | 10 L | N/A | 3 m | N/A | N/A | N/A | [41] |
| Multirotor | N/A | 10 L | N/A | 2, 3, and 4 m | N/A | N/A | N/A | [42] |
| Image | Image processing | Duration | Velocity | GNSS | Accuracy | Ref. | ||
| Remote sensing | ||||||||
| 134 | PTGUI | 16 min | N/A | Metric | R2 = 0.9, RMSE = 5.04, OA = 92.9% | [25] | ||
| 161 | Terra 3D | N/A | N/A | Metric | R2 = 0.98, ME = −0.33, RMSE = 1.29, dr = 0.92 | [26] | ||
| 169 and 150 | Pix4D | N/A | N/A | GCPs | R2 = 0.61–0.97 | [14] | ||
| 113 | ERDAS LPS | N/A | N/A | GCPs | OA = 92.5%, Kappa = 0.87 | [30] | ||
| 128 and 146 | Terra 3D | N/A | N/A | Metric | ME = 0.08 m, RMSE = 0.40 m, MAPE = 6.66 | [31] | ||
| N/A | Pix4D | 20–25 min | 4.4 m/s | GCPs | R2 = 0.92, RMSE = 0.009–0.046 m | [4] | ||
| N/A | Pix4D | 15 min | N/A | GCPs | GCV = 4.54–13% | [32] | ||
| N/A | N/A | N/A | 2.2 m/s | GCPs | R2 = 0.30–0.88 | [33] | ||
| 758 and 723 | Metashape | N/A | N/A | GCPs | r = 0.95, ME = 0.10, MAPE = 4.56, RMSE = 0.16 | [34] | ||
| 236 | Context Master | N/A | N/A | Metric | OA = 94% | [35] | ||
| N/A | PhotoScan | 12 min | N/A | N/A | R2 = 0.15–0.96, RMSE = 1.09–18.32 | [36] | ||
| N/A | R | N/A | 1 m/s | N/A | R2 = 0.97, RMSE = 1.33 kg m2 | [37] | ||
| N/A | Pix4D | N/A | 6 m/s | GCPs | R2 = 0.91 | [38] | ||
| N/A | PhotoScan | N/A | N/A | GCPs | RMSE < 0.18 m | [39] | ||
| N/A | Metashape | < 60 min | 7 m/s | Metric | R2 = 0.97, MAE = 0.02 m | [40] | ||
| Plant Protection | ||||||||
| N/A | N/A | 2:43 min | 4 m/s | RTK | CV = 11.59–32.34% | [41] | ||
| N/A | N/A | N/A | 4, 5, and 6 m/s | RTK | CV = 0.15% | [42] | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbosa Júnior, M.R.; Moreira, B.R.d.A.; Brito Filho, A.L.d.; Tedesco, D.; Shiratsuchi, L.S.; Silva, R.P.d. UAVs to Monitor and Manage Sugarcane: Integrative Review. Agronomy 2022, 12, 661. https://doi.org/10.3390/agronomy12030661
Barbosa Júnior MR, Moreira BRdA, Brito Filho ALd, Tedesco D, Shiratsuchi LS, Silva RPd. UAVs to Monitor and Manage Sugarcane: Integrative Review. Agronomy. 2022; 12(3):661. https://doi.org/10.3390/agronomy12030661
Chicago/Turabian StyleBarbosa Júnior, Marcelo Rodrigues, Bruno Rafael de Almeida Moreira, Armando Lopes de Brito Filho, Danilo Tedesco, Luciano Shozo Shiratsuchi, and Rouverson Pereira da Silva. 2022. "UAVs to Monitor and Manage Sugarcane: Integrative Review" Agronomy 12, no. 3: 661. https://doi.org/10.3390/agronomy12030661
APA StyleBarbosa Júnior, M. R., Moreira, B. R. d. A., Brito Filho, A. L. d., Tedesco, D., Shiratsuchi, L. S., & Silva, R. P. d. (2022). UAVs to Monitor and Manage Sugarcane: Integrative Review. Agronomy, 12(3), 661. https://doi.org/10.3390/agronomy12030661