
LoRa-LBO: An Experimental Analysis of LoRa Link Budget Optimization in Custom Build IoT Test Bed for Agriculture 4.0


 ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
- An overview of LoRa and distinct localization algorithms, namely range-free and range-based, is provided in this article.
- The customization of sensor nodes and the gateway was designed and implemented for monitoring agriculture.
- LoRa and Wi-Fi communication for agriculture is also proposed.
- Implementation of a localization algorithm for agriculture is presented, and we conclude that hybrid range-based localization algorithms are more reliable, scalable, and easy to deploy in the field.
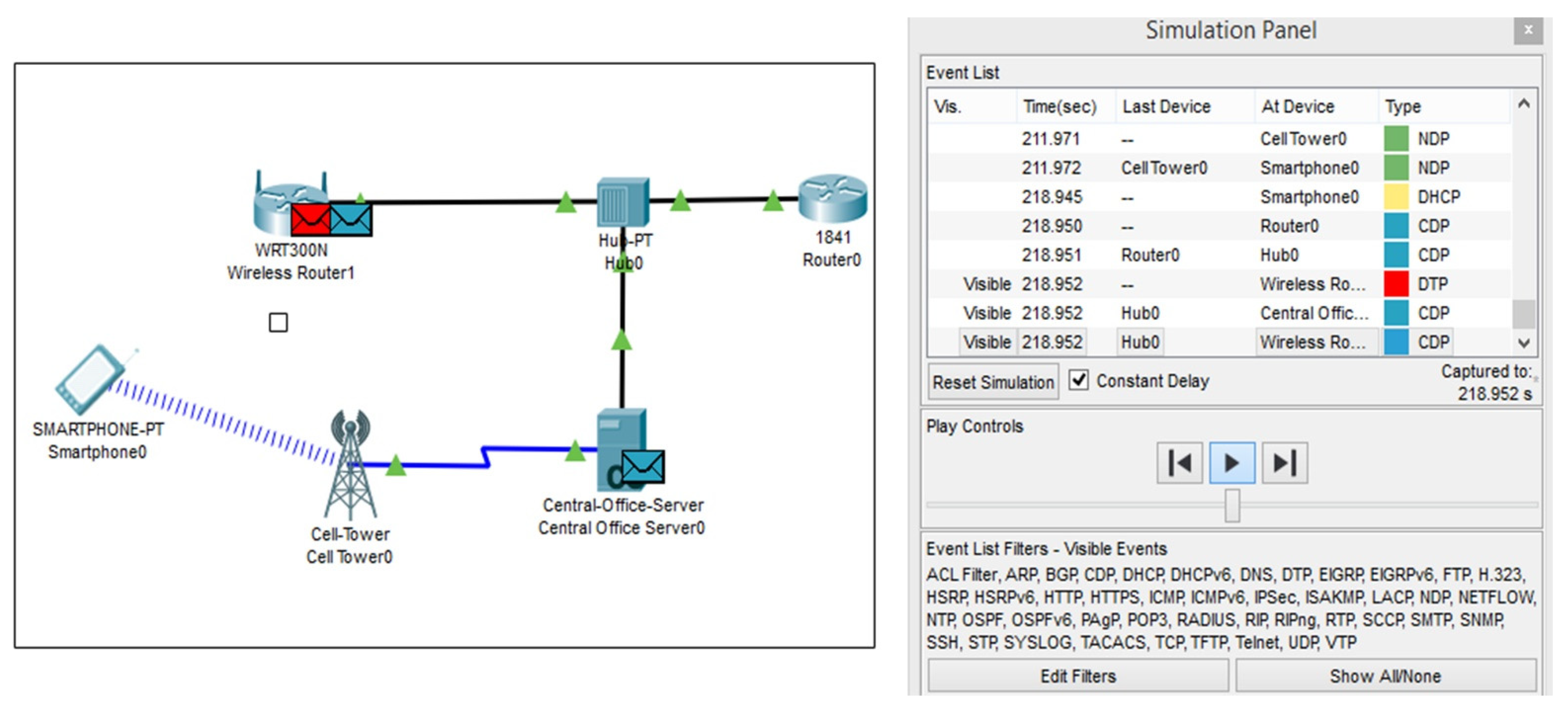
- The energy harvesting mechanism for the sensor nodes is presented, and was evaluated using the Cisco packet tracer.
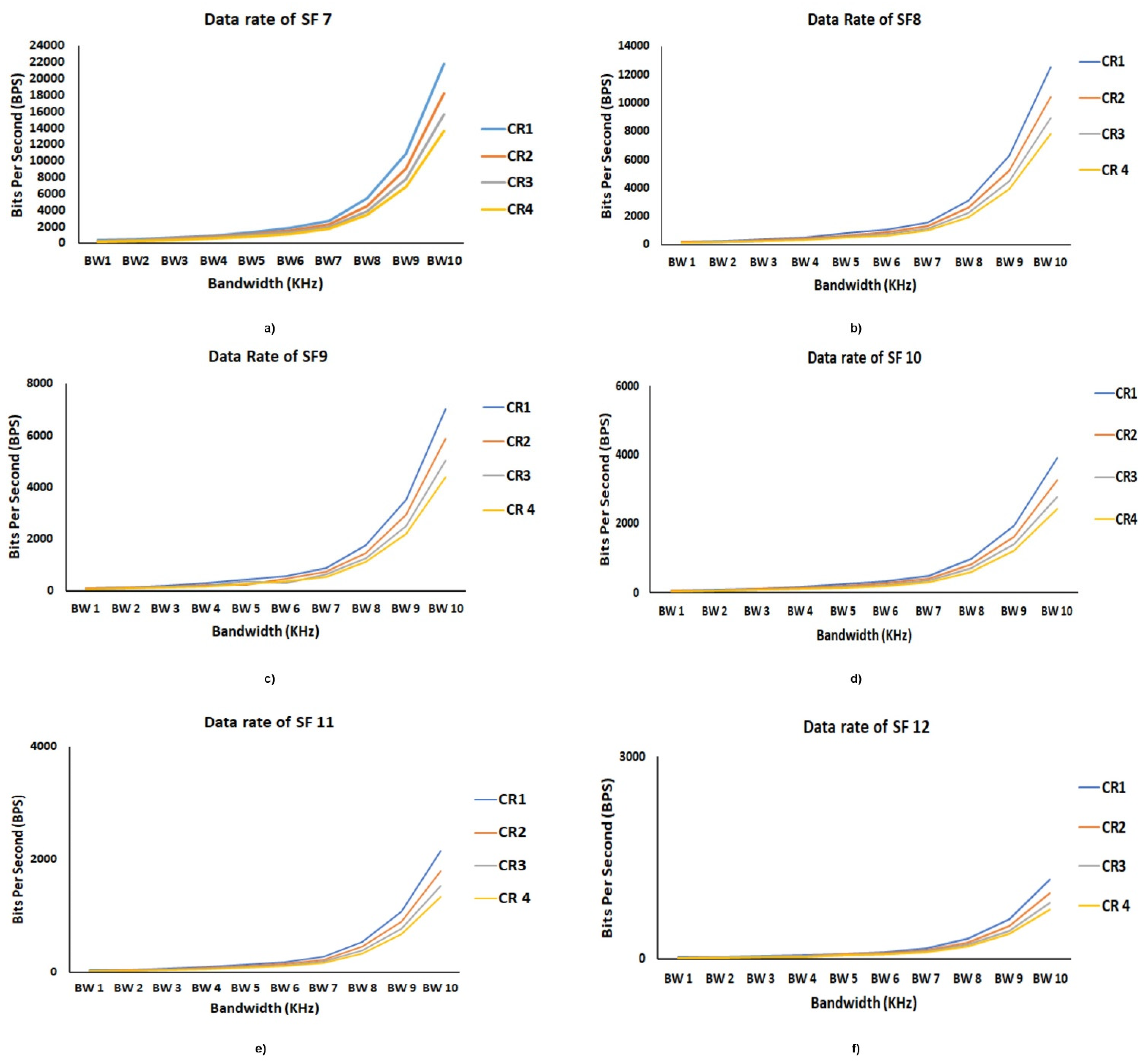
- To characterize the behavior of LoRa, we undertook a simulation using MATLAB.
- A real-time experiment was performed using the customized sensor node and gateway. The sensor node was able to communicate with the cloud server through the LoRa-based gateway.
2. Theoretical Background
3. LoRa and Localization Algorithms
3.1. Overview of LoRa
3.1.1. Spreading Factor
3.1.2. Signal-To-Noise Ratio (SNR)
3.1.3. Link Budget
3.1.4. Sensitivity (S)
3.1.5. Bit Error Rate (BER)
3.1.6. Packet Error Rate (PER)
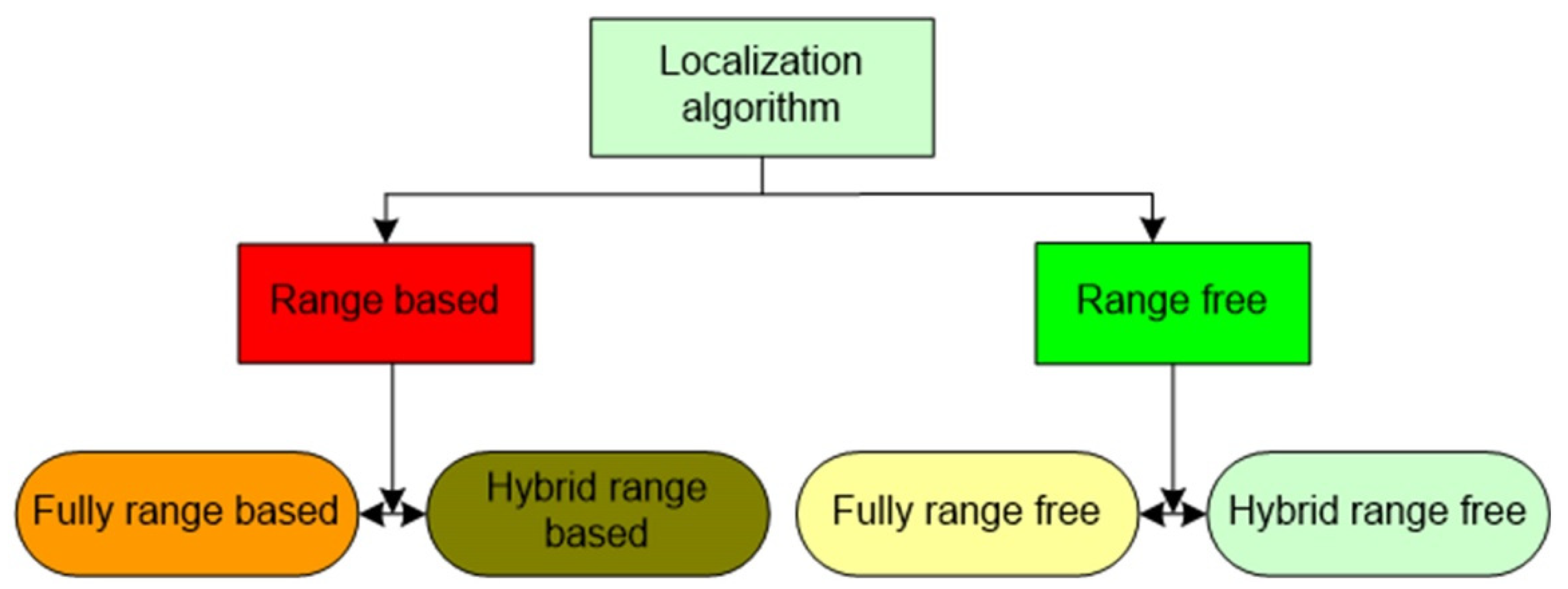
3.2. Localization Algorithm
- (a)
- Range-free localization algorithms
- DV—hop localization:
- In DV hop, the distance between the nodes is estimated using hop count, and the hop count of at least three anchor nodes is distributed across the network [32]. The hop count of a node is incremented by one when the neighbor node transmits the information to another neighbor node. The hop distance is evaluated as the distance between two nodes/number of hops.
- Centroid localization: This is the most basic scheme that uses anchor beacons, containing location information (Xi, Yi) [31], where n is the number of the anchor nodes Ai.
- APIT: In APIT, the location information is obtained by anchor nodes through a global positioning system (GPS) and the unlocalized node receives the location information via overlapped triangles [33].
- Gradient: In the gradient algorithm, the unlocalized node utilizes the multilateration method to estimate the position of nodes. Moreover, it utilizes hop counting and the hop increment while being distributed to neighboring nodes.
- (b)
- Range-based localization algorithms
- ToA localization: This localization algorithm refers to the time of arrival, i.e., ToA, which refers to the time taken for the signal to travel from the sending node to the receiving node [34]. The distance is measured using roundtrip-time of flight (RTOF) to determine the distance between two nodes and is represented in Equation (6) as:
- AODV localization: AODV is the routing protocol based on the distance-vector algorithm, which integrates the target serial number of DSDV and the on-demand routing discovery in DSR [35]. This protocol mainly includes routing discovery and routing maintenance, where the former is only requested to save the overdue routing.
4. Methods and Materials
4.1. Hardware
4.2. Proposed LoRa Architecture
5. Simulation
5.1. Localized Algorithm Simulation
5.2. Simulation of Energy Harvesting
5.3. MATLAB Simulation
- Case I:
- Case II
- Case III:
- Case IV:
6. Results of the Experimental Setup
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Abbreviations
| AOA | Angle of Arrival |
| APIT | Approximate Point in Triangulation |
| BER | Bit Error Rate |
| BW | Bandwidth |
| CR | Code Rate |
| CSS | Chirp Spread Spectrum |
| DV hop | Distance Vector hop |
| FEC | forward Error Correction |
| GPS | Global Positioning System |
| GPRS | Global Packet for Radios Service |
| IoT | Internet of Things |
| ISM | Industrial, Scientific & Medical |
| LoRa | Long Range |
| LoRaWAN | LoRa Wide Area Network |
| LPWAN | Low Power Wide Area Network |
| MCU | Microcontroller Unit |
| MMS | Multimedia Message |
| NB-IoT | Narrow Band-IoT |
| NCA | Neighbor Constraint Assisted |
| NLOS | non-line of sight |
| PER | Packet Error rate |
| PA | Precision Agriculture |
| SF | Spreading Factor |
| SNR | Signal-to-Noise Ration |
| SINR | Signal into Noise Ratio |
| RSSI | Received Signal Strength Indicator |
| RTOF | Roundtrip-Time of Flight |
| TOA | Time on arrival |
| TDOA | Time difference of Arrival TDOA |
| WSN | Wireless Sensor Network |
| Wi-Fi | Wireless-Fidelity |
References
- World Population Projected to Reach 9.8 Billion in 2050 and 11.2 Billion in 2100. April 2021. Available online: https://www.un.org/development/desa/en/news/population/world-population-prospects-2017.html (accessed on 5 April 2021).
- 68% of the World Population Projected to Live in Urban Areas by 2050 Says UN. April 2021. Available online: https://www.un.org/development/desa/en/news/population/2018-revision-of-world-urbanization-prospects.html (accessed on 5 April 2021).
- Food Production Must Double by 2050 to Meet Demand From World’s Growing Population. April 2021. Available online: https://www.un.org/press/en/2009/gaef3242.doc.html (accessed on 5 April 2021).
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.H.M. Internet-of-Things (IoT)-based smart agriculture: Toward making the fields talk. IEEE Access 2019, 7, 129551–129583. [Google Scholar] [CrossRef]
- Trivelli, L.; Apicella, A.; Chiarello, F.; Rana, R.; Fantoni, G.; Tarabella, A. From precision agriculture to Industry 4.0: Unveiling technological connections in the agrifood sector. Br. Food J. 2019, 121, 1730–1743. [Google Scholar] [CrossRef]
- Horton, P.; Horton, P.; Horton, B.P.; Horton, B.P.; Horton, P.; Horton, P.; Horton, B.P.; Horton, B.P.; Horton, P.; Horton, P.; et al. Re-defining Sustainability: Living in Harmony with Life on Earth. One Earth 2019, 1, 86–94. [Google Scholar] [CrossRef]
- Navulur, S.; As, C.S.S.; Prasad, M.N.G. Agricultural Management through Wireless Sensors and Internet of Things. Int. J. Electr. Comput. Eng. 2017, 7, 3492–3499. [Google Scholar] [CrossRef]
- Goyat, R.; Rai, M.K.; Kumar, G.; Kim, H.J.; Lim, S.J. Improved DV-Hop Localization Scheme for Randomly Deployed WSNs. Int. J. Sens. Wirel. Commun. Control 2020, 10, 94–109. [Google Scholar] [CrossRef]
- Jondhale, S.R.; Deshpande, R.S. Self-recurrent neural network based target tracking in wireless sensor network using state observer. Int. J. Sens. Wirel. Commun. Control 2019, 9, 165–178. [Google Scholar] [CrossRef]
- Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; Zaidi, S.A.R.; Iqbal, N. Precision agriculture techniques and practices: From considerations to applications. Sensors 2019, 19, 3796. [Google Scholar] [CrossRef]
- Antony, A.P.; Leith, K.; Jolley, C.; Lu, J.; Sweeney, D.J. A Review of Practice and Implementation of the Internet of Things (IoT) for Smallholder Agriculture. Sustainability 2020, 12, 3750. [Google Scholar] [CrossRef]
- Singh, R.K.; Aernouts, M.; De Meyer, M.; Weyn, M.; Berkvens, R. Leveraging LoRaWAN Technology for Precision Agriculture in Greenhouses. Sensors 2020, 20, 1827. [Google Scholar] [CrossRef]
- Haseeb, K.; Ud Din, I.; Almogren, A.; Islam, N. An energy efficient and secure IoT-based WSN framework: An application to smart agriculture. Sensors 2020, 20, 2081. [Google Scholar] [CrossRef]
- Farooq, M.S.; Riaz, S.; Abid, A.; Abid, K.; Naeem, M.A. A Survey on the Role of IoT in Agriculture for the Implementation of Smart Farming. IEEE Access 2019, 7, 156237–156271. [Google Scholar] [CrossRef]
- Feng, X.; Yan, F.; Liu, X. Study of Wireless Communication Technologies on Internet of Things for Precision Agriculture. Wirel. Pers. Commun. 2019, 108, 1785–1802. [Google Scholar] [CrossRef]
- Prathibha, S.R.; Hongal, A.; Jyothi, M.P. IoT based monitoring system in smart agriculture. In Proceedings of the 2017 International Conference on Recent Advances in Electronics and Communication Technology (ICRAECT), Bangalore, India, 16–17 March 2017; pp. 81–84. [Google Scholar]
- Prakash, S. Zigbee based Wireless Sensor Network Architecture for Agriculture Applications. In Proceedings of the 2020 Third International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 August 2020; pp. 709–712. [Google Scholar]
- Saraf, S.B.; Gawali, D.H. IoT based smart irrigation monitoring and controlling system. In Proceedings of the 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 19–20 May 2017; pp. 815–819. [Google Scholar]
- Ramachandran, V.; Ramalakshmi, R.; Srinivasan, S. An automated irrigation system for smart agriculture using the Internet of Things. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018; pp. 210–215. [Google Scholar]
- Saqib, M.; Almohamad, T.A.; Mehmood, R.M. A Low-Cost Information Monitoring System for Smart Farming Applications. Sensors 2020, 20, 2367. [Google Scholar] [CrossRef]
- Siddique, A.; Prabhu, B.; Chaskar, A.; Pathak, R. A review on intelligent agriculture service platform with lora based wireless sensor network. Life 2019, 100, 7000. [Google Scholar]
- Ji, M.; Yoon, J.; Choo, J.; Jang, M.; Smith, A. Lora-based visual monitoring scheme for agriculture iot. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–6. [Google Scholar]
- Alrajeh, N.A.; Bashir, M.; Shams, B. Localization Techniques in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2013, 9, 304628. [Google Scholar] [CrossRef]
- Aghaie, N.; Tinati, M.A. Localization of WSN nodes based on NLOS identification using AOAs statistical information. In Proceedings of the 2016 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016; pp. 496–501. [Google Scholar]
- Pak, J.M.; Ahn, C.K.; Shi, P.; Shmaliy, Y.S.; Lim, M.T. Distributed Hybrid Particle/FIR Filtering for Mitigating NLOS Effects in TOA-Based Localization Using Wireless Sensor Networks. IEEE Trans. Ind. Electron. 2016, 64, 5182–5191. [Google Scholar] [CrossRef]
- Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Jawad, A.M.; Ismail, M. Energy-Efficient Wireless Sensor Networks for Precision Agriculture: A Review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef] [PubMed]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Chaudhari, B.S.; Zennaro, M.; Borkar, S. LPWAN Technologies: Emerging Application Characteristics, Requirements, and Design Considerations. Future Internet 2020, 12, 46. [Google Scholar] [CrossRef]
- Lee, H.-C.; Ke, K.-H. Monitoring of Large-Area IoT Sensors Using a LoRa Wireless Mesh Network System: Design and Evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar] [CrossRef]
- LoRa Modulation Basics. Available online: http://www.semtech.com/images/datasheet/an1200.22.pdf (accessed on 7 April 2021).
- Huang, Q.; Selvakennedy, S. A range-free localization algorithm for wireless sensor networks. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, VIC, Australia, 7–10 May 2006; Volume 1, pp. 349–353. [Google Scholar]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-free localization schemes for large scale sensor networks. In Proceedings of the 9th Annual International Conference on Mobile Computing and Networking, San Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- Paul, A.K.; Sato, T. Localization in Wireless Sensor Networks: A Survey on Algorithms, Measurement Techniques, Applications and Challenges. J. Sens. Actuator Netw. 2017, 6, 24. [Google Scholar] [CrossRef]
- Langendoen, K.; Reijers, N. Distributed localization in wireless sensor networks: A quantitative comparison. Comput. Netw. 2003, 43, 499–518. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B.D. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Srinivasan, A.; Wu, J. A survey on secure localization in wireless sensor networks. In Encyclopedia of Wireless and Mobile Communications; Auerbach Publications: Boston, MA, USA, 2007; p. 126. [Google Scholar]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the IEEE INFOCOM 2003. Twenty-second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No. 03CH37428), San Francisco, CA, USA, 30 March–3 April 2003; Volume 3, pp. 1734–1743. [Google Scholar]
- Youssef, A.M.; Youssef, M. A taxonomy of localization schemes for wireless sensor networks. In Proceedings of the ICWN, Las Vegas, NV, USA, 25–28 June 2007; pp. 444–450. [Google Scholar]
- Niu, R.; Vempaty, A.; Varshney, P.K. Received-Signal-Strength-Based Localization in Wireless Sensor Networks. Proc. IEEE 2018, 106, 1166–1182. [Google Scholar] [CrossRef]
- Mesmoudi, A.; Feham, M.; Labraoui, N. Wireless sensor networks localization algorithms: A comprehensive survey. arXiv 2013, arXiv:1312.4082. [Google Scholar] [CrossRef]
- Roopaei, M.; Rad, P.; Choo, K.K.R. Cloud of things in smart agriculture: Intelligent irrigation monitoring by thermal imaging. IEEE Cloud Comput. 2017, 4, 10–15. [Google Scholar] [CrossRef]
- Suma, D.N.; Samson, S.R.; Saranya, S.; Shanmugapriya, G.; Subhashri, R. IOT Based Smart Agriculture Monitoring System. Int. J. Recent Innov. Trends Comput. Commun. 2017, 5, 177–181. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Zig-Bee | Bluetooth | BLE | Wi-Fi | GPRS | LoRa | NB-IoT | SigFox |
|---|---|---|---|---|---|---|---|---|
| Frequency band | 868/915 MHz and 2.4 GHz | 2.40 GHz | 2.40 GHz | 2.40 GHz | 900 to 1800 MHz | 869 to 915 MHz | Licensed LTE frequency bands | 868 to 915 MHz |
| Network size | Approx. 65,000 | Approx. 8 | Limited application | Approx 32 | Approx 1000 | 10,000 no of (nodes per BS) | 52,000 devices/channel/cel | 1,000,000 no. of (nodes per BS |
| Network Topologies | P2P, tree, star, mesh | Scatter-net Topology | Star-bus topology | Point-to-hub topology | Cellular system Topology | Star-of-stars | Star topology | Star topology |
| Channel bandwidth | Equal to 2 MHz | 1 MHz | 1 MHz | 22 MHz | 200 kHz | <500 KHz | 200 kHz | 200 kHz |
| Power consumption in Txmode | Around 36.9 mW | Around 215 mW | Around 10 mW | Around 835 mW | 560 mW | 100 mW | NA | 122 mW |
| Application | WPANs, WSNs, and Agriculture | WPANs | WPANs | WLANs | AMI, demand response, HAN | Agriculture, Smart grid, environment control, and lighting control | Smart metering, Tracking of persons, animals, or objects, etc. | Agriculture and environment, automotive, buildings, and consumer electronics |
| Limitations | Mandatory line-of-sight | Short communication range | Short communication range | High power consumption and high latency (13.74 s) | Power consumption problem | Network size(scalability), data rate, and message capacity | Incapable of a seamless handover between cells and does not provide low latency application | Low data rates |
| Parameters | Fully Range Free Based Algorithms | Hybrid Range Based Algorithm | ||||
|---|---|---|---|---|---|---|
| CA | NCA | DV-HoP | ATPA | EATL | FRTL | |
| Node deployment | Both uniform and random | Random | Random | Random | Both uniform and random | Random |
| Node density | Low | Low | High | High | Low | Medium |
| Existence of obstacle | Yes | Yes | Yes | Yes | Yes | Yes |
| Anchor node presence | Yes | Yes | Yes | Yes | Yes | Yes |
| Range estimation | Computational | Computational | Computational | Computational | Computational | Computational |
| Range combination | Centroid | Centroid | TOA, TDOA | TOA | TDOA | RSSI |
| Localization co-ordinates | RD | 3D | 2D | 2D | 2D | 2D |
| Scalability | Yes | Yes | No | Yes | Yes | Yes |
| Accuracy | Low | Low | Medium | Very High | Very High | High |
| SF | Chirps | SNR | ToA | Data Ate |
|---|---|---|---|---|
| 7 | 128 | −8.5 | 122 ms | 6345 bps |
| 8 | 256 | −11 | 189 ms | 4425 bps |
| 9 | 512 | −15.48 | 235 ms | 2118 bps |
| 10 | 1024 | −18.5 | 381 ms | 1233 bps |
| 11 | 2048 | −15.48 | 235 ms | 2118 bps |
| 12 | 4096 | −18.5 | 381 ms | 1233 bps |
| Mode (Down Link) | Gateway Height in Meter | End Node Height in Meter | Link Budget dBm | Range in Meter |
|---|---|---|---|---|
| Down Link | 1 | 1 | 159 | 932 |
| Down Link | 2 | 1 | 159 | 1318 |
| Down Link | 3 | 1 | 159 | 1614 |
| Down Link | 4 | 1 | 159 | 1683 |
| Down Link | 5 | 1 | 159 | 2083 |
| Down Link | 6 | 1 | 159 | 2282 |
| Down Link | 7 | 1 | 159 | 2465 |
| Mode (Down Link) | Gateway Height in Meter | End Node Height in Meter | Link Budget dBm | Range in Meter |
|---|---|---|---|---|
| Down Link | 1 | 2 | 159 | 1319 |
| Down Link | 2 | 2 | 159 | 1863 |
| Down Link | 3 | 2 | 159 | 2282 |
| Down Link | 4 | 2 | 159 | 2635 |
| Down Link | 5 | 2 | 159 | 2946 |
| Mode (Down Link) | Gateway Height in Meter | End Node Height in Meter | Link Budget dBm | Range in Meter |
|---|---|---|---|---|
| Down Link | 1 | 1 | 151 | 1681 |
| Down Link | 2 | 1 | 151 | 2377 |
| Down Link | 3 | 1 | 151 | 2911 |
| Down Link | 4 | 1 | 151 | 3362 |
| Down Link | 5 | 1 | 151 | 3758 |
| Mode (Up Link) | Antenna Tx Gain in dB | Link Budget dBm | Range in Meter | Range in Square KM |
|---|---|---|---|---|
| Up Link | 0 | 141 | 945 | 3 |
| Up Link | 1 | 142 | 1001 | 3 |
| Up Link | 2 | 143 | 1061 | 3 |
| Up Link | 3 | 144 | 1123 | 4 |
| Up Link | 4 | 145 | 1190 | 4 |
| Up Link | 5 | 146 | 1260 | 4 |
| Up Link | 10 | 151 | 1681 | 8 |
| Up Link | 15 | 156 | 2241 | 16 |
| Up Link | 25 | 166 | 3986 | 28 |
| Mode (Up Link) | Frequency | Node Sensitivity in dBm | Range in Meter | Range in Square KM |
|---|---|---|---|---|
| Up Link | 433 | −124 | 945 | 3 |
| Up Link | 433 | −125 | 1001 | 3 |
| Up Link | 433 | −126 | 1061 | 3 |
| Up Link | 433 | −127 | 1123 | 4 |
| Up Link | 433 | −128 | 1190 | 4 |
| Up Link | 433 | −129 | 1260 | 4 |
| Up Link | 433 | −130 | 1681 | 8 |
| Up Link | 433 | −131 | 2241 | 16 |
| Up Link | 433 | −132 | 3986 | 28 |
| Research | Communication Protocol | Custom End Node | Custom Gateway | Hand-Held for Farmer | Link Budget Validation | LoRa Simulation | Plot of Evaluation Metrics |
|---|---|---|---|---|---|---|---|
| [12] | LoRa | No | No | No | Yes | Yes | yes |
| [13] | LoRa | No | No | No | Yes | Yes | yes |
| [41] | WiFi | No | No | No | Yes | Yes | yes |
| [42] | WiFi | No | No | No | Yes | Yes | yes |
| Proposed study | LoRa + WiFi (with optimized embedded firmware) | Yes (customized) | Yes (custom design) | Yes (customized) | Yes | Simulation + validation on hardware | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Swain, M.; Zimon, D.; Singh, R.; Hashmi, M.F.; Rashid, M.; Hakak, S. LoRa-LBO: An Experimental Analysis of LoRa Link Budget Optimization in Custom Build IoT Test Bed for Agriculture 4.0. Agronomy 2021, 11, 820. https://doi.org/10.3390/agronomy11050820
Swain M, Zimon D, Singh R, Hashmi MF, Rashid M, Hakak S. LoRa-LBO: An Experimental Analysis of LoRa Link Budget Optimization in Custom Build IoT Test Bed for Agriculture 4.0. Agronomy. 2021; 11(5):820. https://doi.org/10.3390/agronomy11050820
Chicago/Turabian StyleSwain, Mahendra, Dominik Zimon, Rajesh Singh, Mohammad Farukh Hashmi, Mamoon Rashid, and Saqib Hakak. 2021. "LoRa-LBO: An Experimental Analysis of LoRa Link Budget Optimization in Custom Build IoT Test Bed for Agriculture 4.0" Agronomy 11, no. 5: 820. https://doi.org/10.3390/agronomy11050820
APA StyleSwain, M., Zimon, D., Singh, R., Hashmi, M. F., Rashid, M., & Hakak, S. (2021). LoRa-LBO: An Experimental Analysis of LoRa Link Budget Optimization in Custom Build IoT Test Bed for Agriculture 4.0. Agronomy, 11(5), 820. https://doi.org/10.3390/agronomy11050820