Prediction of Draft Force of a Chisel Cultivator Using Artificial Neural Networks and Its Comparison with Regression Model

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
- Prediction of the draft force of the chisel cultivator with the ANN model using the physical and mechanical properties of soil, tractor speed, and working depth.
- Comparison of the accuracy of different artificial neural network training methods to predict the required draft force of the chisel cultivator.
- Comparison of the accuracy of the ANN model with the linear regression model in order to predict the draft force of the chisel cultivator.
2. Materials and Methods
2.1. Equipment Used for Experiments
2.2. Draft Force and Actual Tractor Speed Measurement System
2.3. Field Experiments
2.4. Prediction of Draft Force of Cultivator with Chisel Blade Using ANNs
2.4.1. Artificial Neural Network (ANN) Model Design
2.4.2. Network Type and Training Method
2.4.3. Learning Parameters
2.4.4. Number of Neurons and Activation Functions
2.4.5. Normalization
2.4.6. Network Performance Evaluation
Dot Chart
Quantitative Indicators
3. Results and Discussion
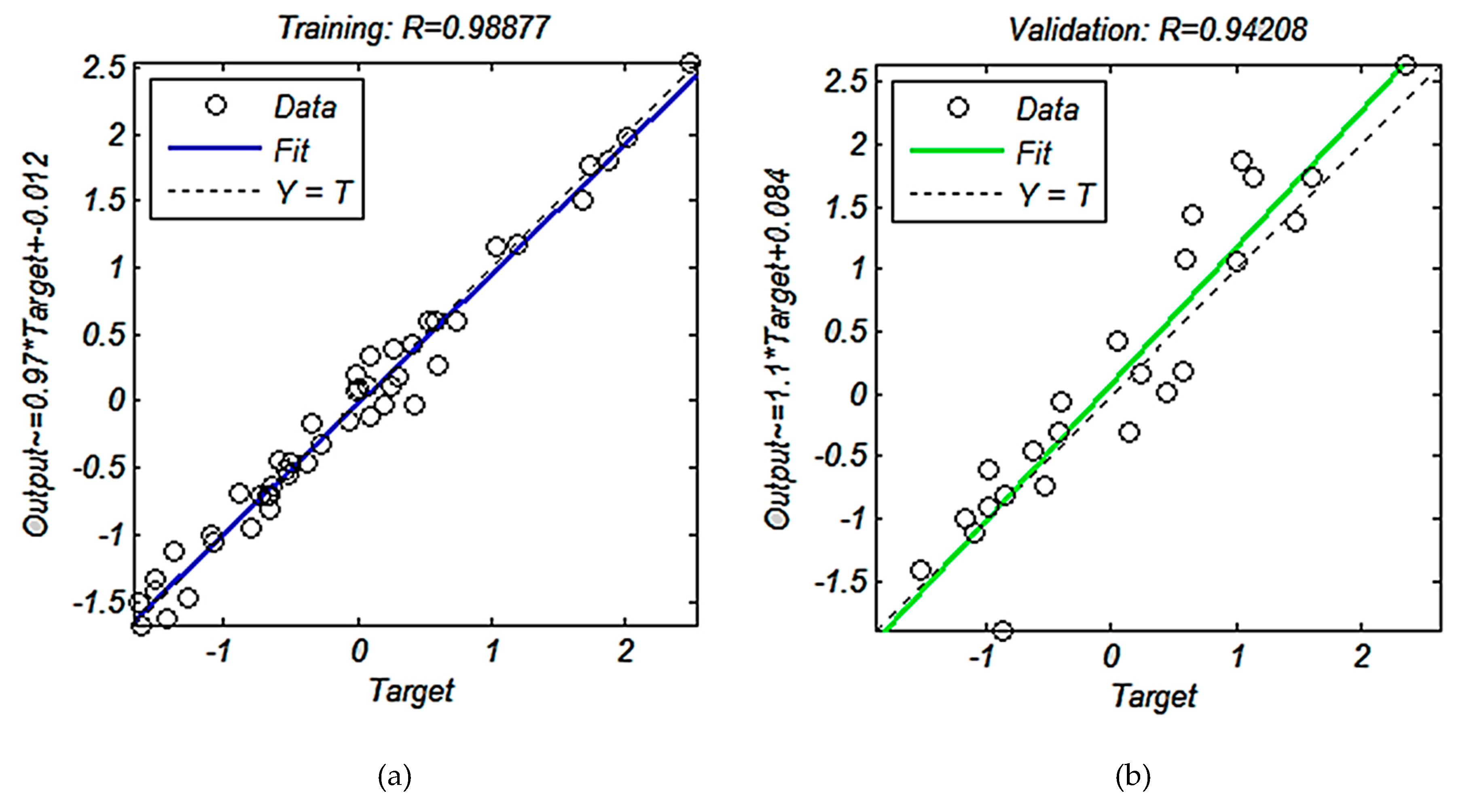
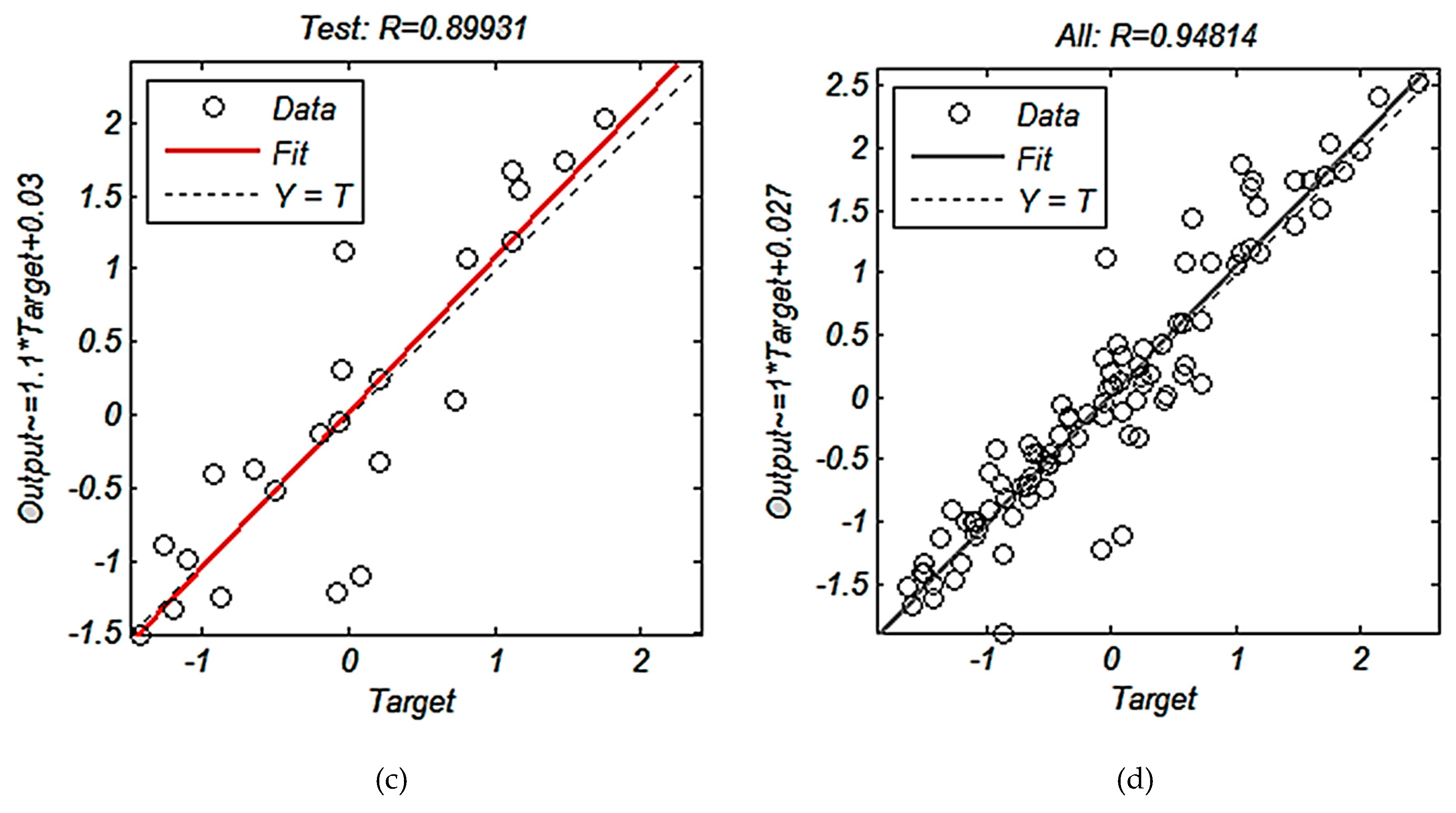
3.1. Prediction of Draft Force Using ANNs
3.2. Comparison of ANN Model with the Linear Regression Model
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jabran, K.; Chauhan, B.S. Non-Chemical Weed Control; Academic Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Safari, M. Design, Manufacture and Evaluation of Rotary Cultivator; Institute of Agricultural Engineering and Engineering Research: Karaj, Iran, 2008. [Google Scholar]
- Bell, B. Farm Machinery; Old Pond Books: West Sussex, UK, 2010. [Google Scholar]
- Al-Janobi, A.; Al-Suhaibani, S. Draft of primary tillage implements in sandy loam soil. Appl. Eng. Agric. 1998, 14, 343–348. [Google Scholar] [CrossRef]
- Abbaspour, Y.; Bavafa, M. Design and construction of a high speed inter-row cultivator. Appl. Mech. Mater. Vols 2011, 110, 4914–4918. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Khalilian, A.; Reza, A.; Alireza, K.; Sadati, S. Energy savings with variable-depth tillage. In Proceedings of the 27th Southern Conservation Tillage Systems Conference, Florence, SC, USA, 27–29 June 2005; pp. 84–91. [Google Scholar]
- Nasiri, M. Calculation of required draft force of cultivator using 3D finit element methods. In Proceedings of the 6th National Congress of Agriculture Machinary, Karaj, Iran, 15–16 September 2010. [Google Scholar]
- Ahmadi-Moghaddam, P.; Komarizadeh, M.H. Simulation of Cultivator Shank with ANSYS. In Proceedings of the Second National Congress of Agricultural Machiney and Mechanization, Tehran, Iran, 30–31 October 2002. [Google Scholar]
- Biswas, H.; Rajput, D.; Devnani, R. Animal-Drawn Weeders for Weed Control in India; Atnesa: Wageningen, The Netherlands, 2000; pp. 134–140. [Google Scholar]
- Brown, R. Handbook of Engineering in Agriculture; CRC Press: Boca Raton, FL, USA, 1988; Volume I. [Google Scholar]
- Safdari, S. Dynamic and Mechanical Analysis of Cultivator Shank Using Finite Element Methods; Agricultural Machinery Department, Urmia University: Urmia, Iran, 2008. [Google Scholar]
- Agricultural, A.S.O.; Engineers, B. Agricultural Machinery Management Data; American Society of Agricultural and Biological Engineers: San Jose, MI, USA, 2011. [Google Scholar]
- Alimardani, R.; Abbaspour-Gilandeh, Y.; Khalilian, A.; Keyhani, A.; Sadati, S.H. Prediction of draft force and energy of subsoiling operation using ANN model. J. Food Agric. Environ. 2009, 7, 537–542. [Google Scholar]
- Askari, M.; Abbaspour-Gilandeh, Y. Assessment of adaptive neuro-fuzzy inference system and response surface methodology approaches in draft force prediction of subsoiling tines. Soil Tillage Res. 2019, 194, 104338. [Google Scholar] [CrossRef]
- Mansourian, S.; Darbandi, E.I.; Mohassel, M.H.R.; Rastgoo, M.; Kanouni, H. Comparison of artificial neural networks and logistic regression as potential methods for predicting weed populations on dryland chickpea and winter wheat fields of Kurdistan province, Iran. Crop Prot. 2017, 93, 43–51. [Google Scholar] [CrossRef]
- Suzuki, K. Artificial Neural Networks: Architectures and Applications; InTech Publisher: Rijeka, Croatia, 2013. [Google Scholar]
- Abbaspour-Gilandeh, Y.; Rashidi-Mohammadabad, F. Evaluation of dynamic load equations through continuous measurement of some tractor tractive performance parameters. Int. J. Heavy Veh. Syst. 2013, 20, 222–235. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Haghighat-Shishvan, S. Extended octagonal ring transducers for measurement of tractor-implement forces. Instrum. Exp. Tech. 2011, 54, 136–140. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Ahani, M.; Askari Asli-Ardeh, E.; Rasooli-Sharabiani, V.; Sofalian, O. Design, fabrication and evaluation of a tractor-mounted soil cone penetrometer with multiple probes. J. Agric. Eng. Res. (Iran) 2010, 11, 19–34. [Google Scholar]
- Rahimi-Ajdadi, F.; Abbaspour-Gilandeh, Y. Artificial neural network and stepwise multiple range regression methods for prediction of tractor fuel consumption. Measurement 2011, 44, 2104–2111. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Neurons | LR | M | MSE | Coefficient of Determination | Average Accuracy of Network (%) | Correlation Coefficient | ||
|---|---|---|---|---|---|---|---|---|
| Test | Validation | Train | ||||||
| 4 + 2 | 0.3 | 0.3 | 0.0904 | 0.780527 | 0.777165 | 0.774433 | 83.66 | 0.9101 |
| 4 + 6 | 0.3 | 0.3 | 0.0896 | 0.801491 | 0.757088 | 0.796031 | 83.25 | 0.9115 |
| 6 + 6 | 0.3 | 0.3 | 0.0905 | 0.771885 | 0.724120 | 0.734766 | 84.43 | 0.9094 |
| 8 + 8 | 0.3 | 0.3 | 0.0438 | 0.875779 | 0.724649 | 0.652421 | 83.84 | 0.8856 |
| 10 + 8 | 0.3 | 0.3 | 0.1590 | 0.755857 | 0.773074 | 0.745824 | 83.65 | 0.8907 |
| 12 + 10 | 0.3 | 0.3 | 0.0466 | 0.903461 | 0.732101 | 0.717110 | 84.35 | 0.9108 |
| 12 + 12 | 0.3 | 0.3 | 0.0147 | 0.933135 | 0.783273 | 0.687282 | 83.83 | 0.8930 |
| 12 + 14 | 0.3 | 0.3 | 0.1480 | 0.732216 | 0.787584 | 0.583859 | 81.75 | 0.8717 |
| 16 + 14 | 0.3 | 0.3 | 0.0793 | 0.834214 | 0.767770 | 0.719177 | 83.66 | 0.9039 |
| 16 + 16 | 0.3 | 0.3 | 0.0131 | 0.942864 | 0.658260 | 0.675529 | 83.86 | 0.8776 |
| 22 + 20 | 0.3 | 0.3 | 0.0534 | 0.872106 | 0.743275 | 0.705716 | 81.50 | 0.8971 |
| 22 + 24 | 0.3 | 0.3 | 0.0346 | 0.870937 | 0.702234 | 0.623892 | 83.98 | 0.8877 |
| 26 + 24 | 0.3 | 0.3 | 0.0034 | 0.976561 | 0.738181 | 0.699626 | 85.07 | 0.9292 |
| 28 + 28 | 0.3 | 0.3 | 0.0527 | 0.883226 | 0.657556 | 0.753129 | 83.67 | 0.9114 |
| 36 + 34 | 0.3 | 0.3 | 0.0477 | 0.864871 | 0.735306 | 0.627537 | 84.85 | 0.8764 |
| 36 + 36 | 0.3 | 0.3 | 0.0588 | 0.846373 | 0.724330 | 0.661029 | 82.54 | 0.8873 |
| 38 + 40 | 0.3 | 0.3 | 0.0143 | 0.940712 | 0.725693 | 0.668289 | 83.90 | 0.8864 |
| Number of Neurons | LR | M | MSE | Coefficient of Determination | Average Accuracy of Network (%) | Correlation Coefficient | ||
|---|---|---|---|---|---|---|---|---|
| Test | Validation | Train | ||||||
| 6 + 4 | 0.3 | 0.3 | 0.151 | 0.756592 | 0.750169 | 0.774226 | 84.49 | 0.8897 |
| 6 + 6 | 0.3 | 0.3 | 0.0782 | 0.838732 | 0.775175 | 0.7925 | 86.02 | 0.9223 |
| 8 + 6 | 0.3 | 0.3 | 0.105 | 0.791611 | 0.738437 | 0.7476 | 83.45 | 0.8881 |
| 10 + 10 | 0.3 | 0.3 | 0.107 | 0.793664 | 0.755517 | 0.715164 | 84.4 | 0.8921 |
| 10 + 12 | 0.3 | 0.3 | 0.12 | 0.782386 | 0.772313 | 0.767383 | 83.73 | 0.8945 |
| 12 + 12 | 0.3 | 0.3 | 0.0973 | 0.833013 | 0.791257 | 0.768084 | 85.47 | 0.9102 |
| Number of Neurons | LR | M | MSE | Coefficient of Determination | Average Accuracy of Network (%) | Correlation Coefficient | ||
|---|---|---|---|---|---|---|---|---|
| Test | Validation | Train | ||||||
| 4 + 4 | 0.3 | 0.3 | 0.115 | 0.778741 | 0.766089 | 0.770431 | 84.97 | 0.9089 |
| 6 + 4 | 0.3 | 0.3 | 0.148 | 0.774982 | 0.785852 | 0.799405 | 85.47 | 0.9113 |
| 6 + 6 | 0.3 | 0.3 | 0.126 | 0.821494 | 0.81212 | 0.772994 | 84.20 | 0.8979 |
| 8 + 6 | 0.3 | 0.3 | 0.0467 | 0.864955 | 0.757732 | 0.678382 | 85.36 | 0.9017 |
| 10 + 10 | 0.3 | 0.3 | 0.0889 | 0.822535 | 0.784321 | 0.686702 | 83.73 | 0.891 |
| 12 + 10 | 0.3 | 0.3 | 0.0869 | 0.840482 | 0.7598 | 0.740341 | 85.04 | 0.9064 |
| 14 + 12 | 0.3 | 0.3 | 0.0966 | 0.797844 | 0.790739 | 0.784848 | 85.27 | 0.9089 |
| 16 + 14 | 0.3 | 0.3 | 0.667 | 0.855265 | 0.785372 | 0.740823 | 85.72 | 0.9171 |
| 16 + 18 | 0.3 | 0.3 | 0.0685 | 0.844745 | 0.756035 | 0.69695 | 84.25 | 0.8918 |
| 20 + 18 | 0.3 | 0.3 | 0.0964 | 0.828055 | 0.782176 | 0.751421 | 85.18 | 0.9094 |
| 20 + 20 | 0.3 | 0.3 | 0.0372 | 0.895046 | 0.831287 | 0.79127 | 88.53 | 0.9403 |
| 22 + 20 | 0.3 | 0.3 | 0.0308 | 0.904866 | 0.820977 | 0.808462 | 87.14 | 0.9255 |
| 22 + 24 | 0.3 | 0.3 | 0.0274 | 0.911522 | 0.76256 | 0.716449 | 85.84 | 0.8916 |
| 26 + 24 | 0.3 | 0.3 | 0.0845 | 0.826004 | 0.767925 | 0.788527 | 89.48 | 0.9445 |
| 26 + 28 | 0.3 | 0.3 | 0.0256 | 0.916137 | 0.756923 | 0.684185 | 86.42 | 0.9017 |
| 28 + 28 | 0.3 | 0.3 | 0.0299 | 0.9045 | 0.806509 | 0.758626 | 87.14 | 0.9257 |
| 34 + 32 | 0.3 | 0.3 | 0.0625 | 0.847921 | 0.746024 | 0.685651 | 84.65 | 0.8983 |
| 34 + 36 | 0.3 | 0.3 | 0.0335 | 0.88406 | 0.81623 | 0.711774 | 86.40 | 0.9042 |
| 38 + 36 | 0.3 | 0.3 | 0.0415 | 0.886807 | 0.718052 | 0.648311 | 85.77 | 0.9197 |
| 38 + 40 | 0.3 | 0.3 | 0.0362 | 0.895807 | 0.762768 | 0.782852 | 86.22 | 0.908 |
| 40 + 40 | 0.3 | 0.3 | 0.0255 | 0.913283 | 0.740969 | 0.764075 | 86.86 | 0.9172 |
| Training Algorithm | Activation Function | Number of Neurons in Hidden Layer | Epoch | MSE | Average Accuracy of Network (%) | Correlation Coefficient |
|---|---|---|---|---|---|---|
| Trainlm | tansig | 26 + 24 | 3 | 0.00335 | 85.07 | 0.9292 |
| Traingdm | tansig | 6 + 6 | 55 | 0.0782 | 86.02 | 0.9223 |
| Trainscg | tansig | 26 + 24 | 21 | 0.0398 | 89.48 | 0.9445 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbaspour-Gilandeh, Y.; Fazeli, M.; Roshanianfard, A.; Hernández-Hernández, M.; Gallardo-Bernal, I.; Hernández-Hernández, J.L. Prediction of Draft Force of a Chisel Cultivator Using Artificial Neural Networks and Its Comparison with Regression Model. Agronomy 2020, 10, 451. https://doi.org/10.3390/agronomy10040451
Abbaspour-Gilandeh Y, Fazeli M, Roshanianfard A, Hernández-Hernández M, Gallardo-Bernal I, Hernández-Hernández JL. Prediction of Draft Force of a Chisel Cultivator Using Artificial Neural Networks and Its Comparison with Regression Model. Agronomy. 2020; 10(4):451. https://doi.org/10.3390/agronomy10040451
Chicago/Turabian StyleAbbaspour-Gilandeh, Yousef, Masoud Fazeli, Ali Roshanianfard, Mario Hernández-Hernández, Iván Gallardo-Bernal, and José Luis Hernández-Hernández. 2020. "Prediction of Draft Force of a Chisel Cultivator Using Artificial Neural Networks and Its Comparison with Regression Model" Agronomy 10, no. 4: 451. https://doi.org/10.3390/agronomy10040451
APA StyleAbbaspour-Gilandeh, Y., Fazeli, M., Roshanianfard, A., Hernández-Hernández, M., Gallardo-Bernal, I., & Hernández-Hernández, J. L. (2020). Prediction of Draft Force of a Chisel Cultivator Using Artificial Neural Networks and Its Comparison with Regression Model. Agronomy, 10(4), 451. https://doi.org/10.3390/agronomy10040451