
Developing a New Constitutive Model of High Damping Rubber by Combining GRU and Attention Mechanism


Abstract
1. Introduction
2. Compression-Shear Test
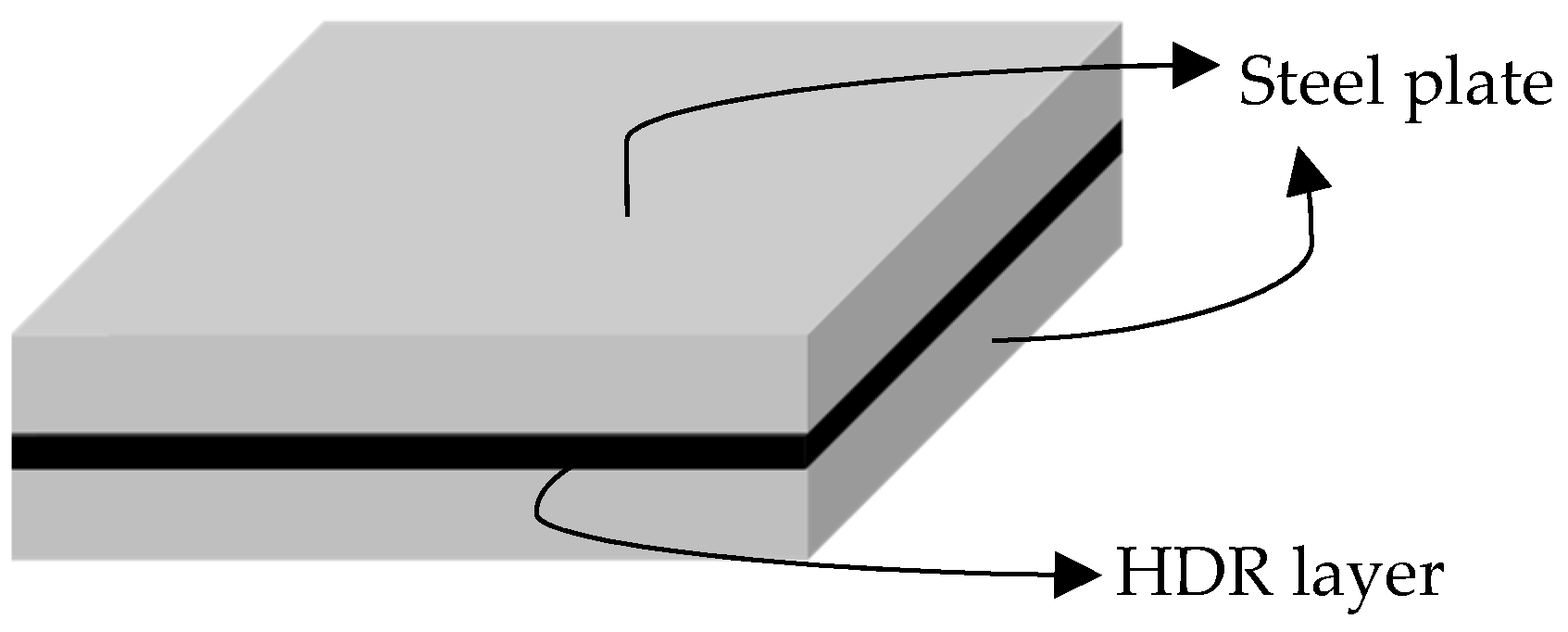
2.1. HDR Specimen and Loading Devices
2.2. Test Cases
3. RNN Model Development
3.1. GRU Model
3.2. Introducing the Attention Mechanism
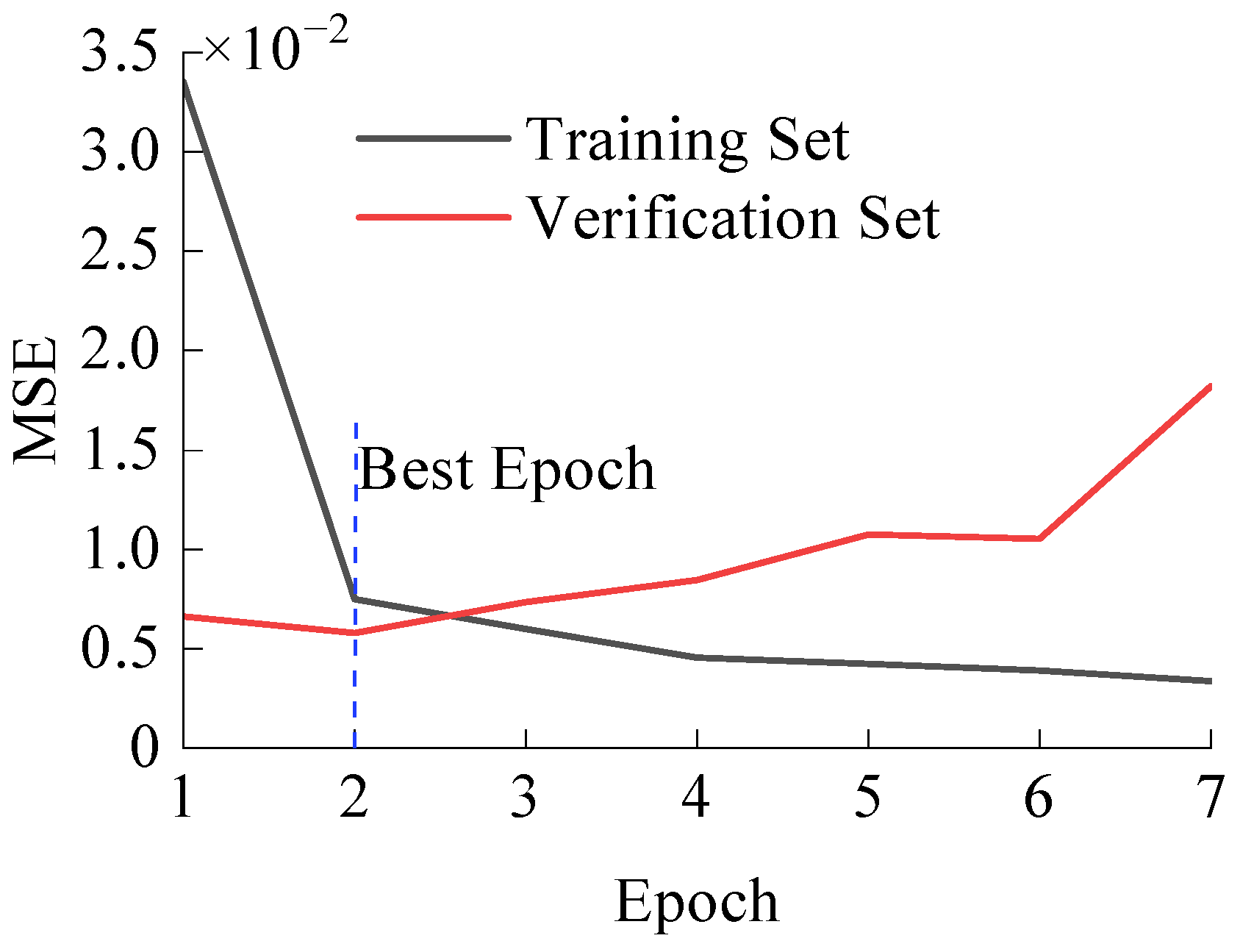
3.3. Training Results
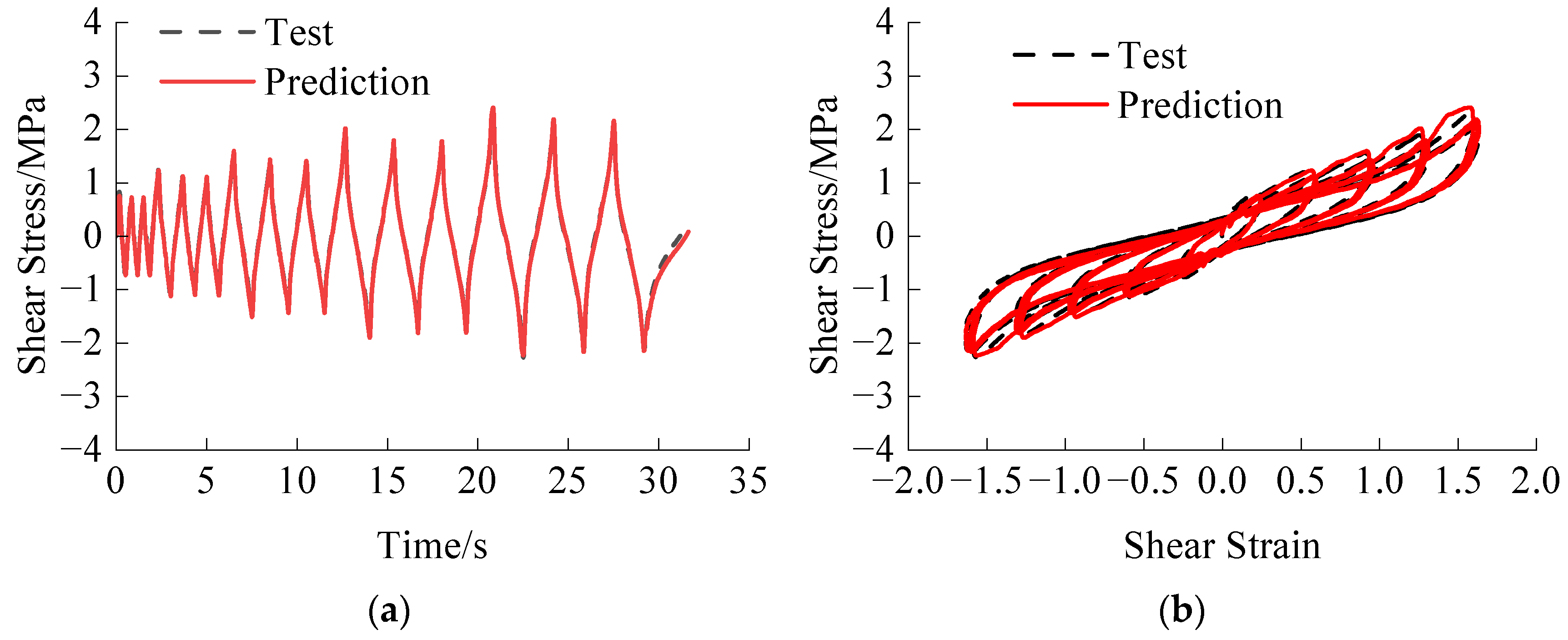
3.4. Prediction Results
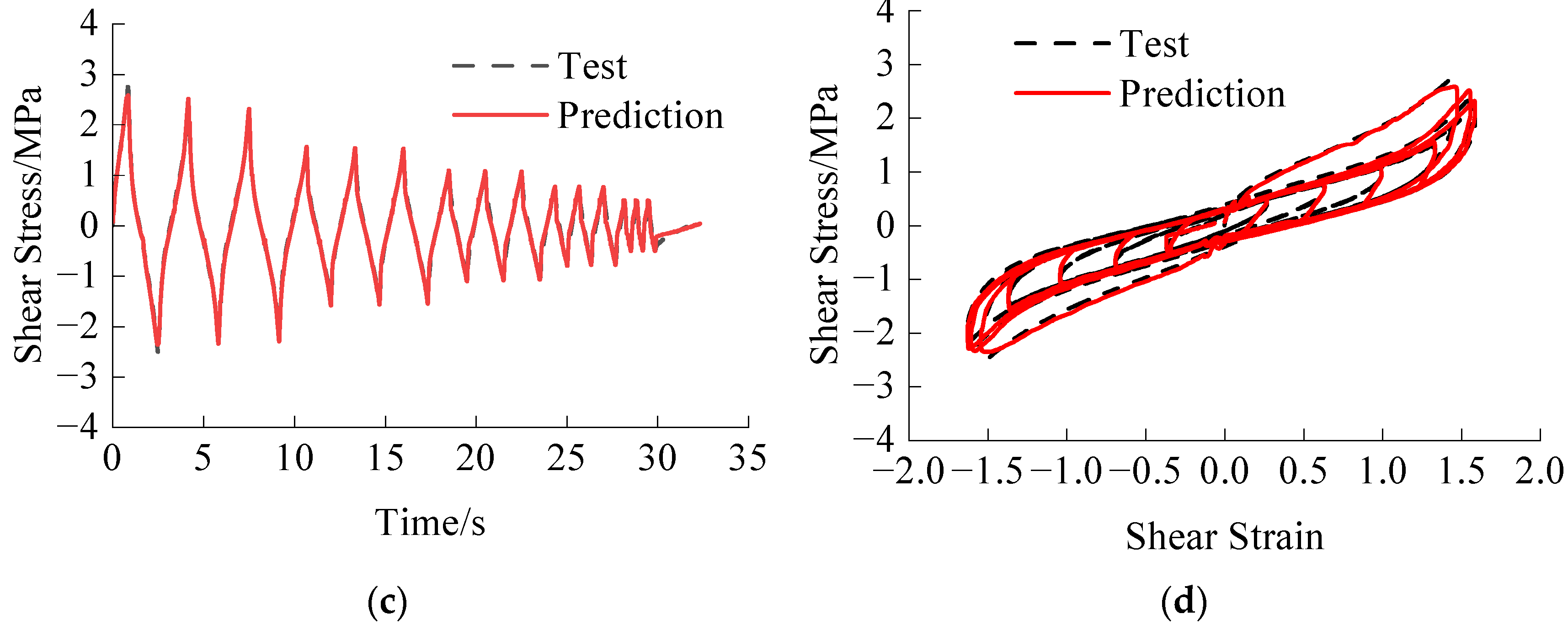
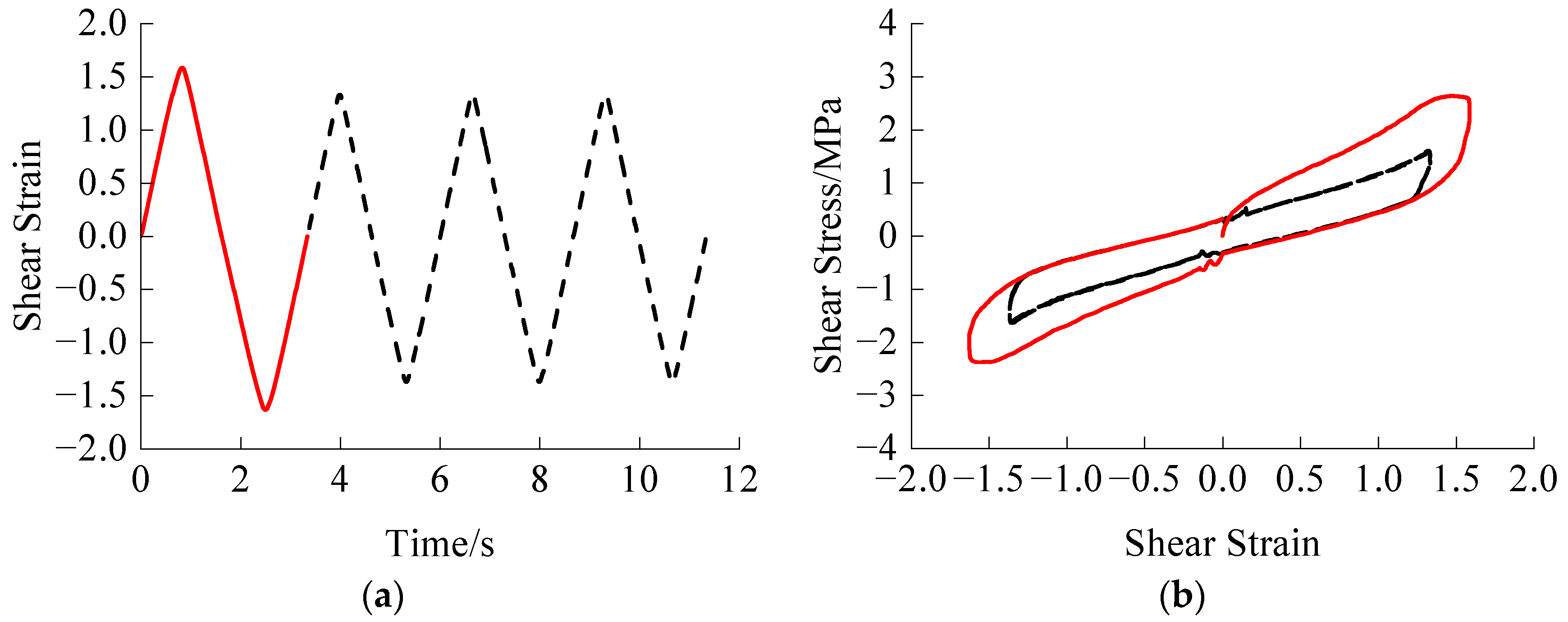
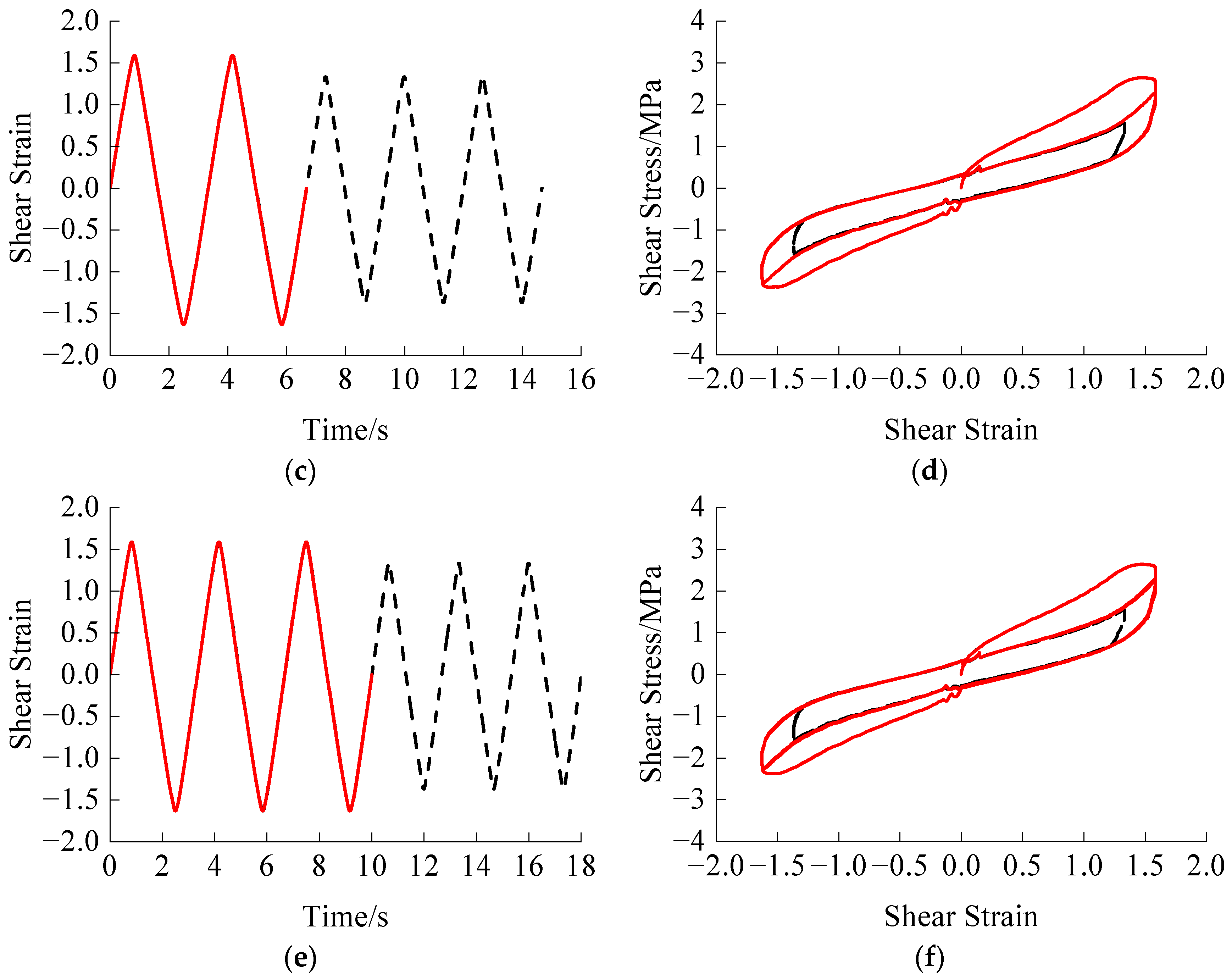
4. Influence of the Loading Process
5. Conclusions
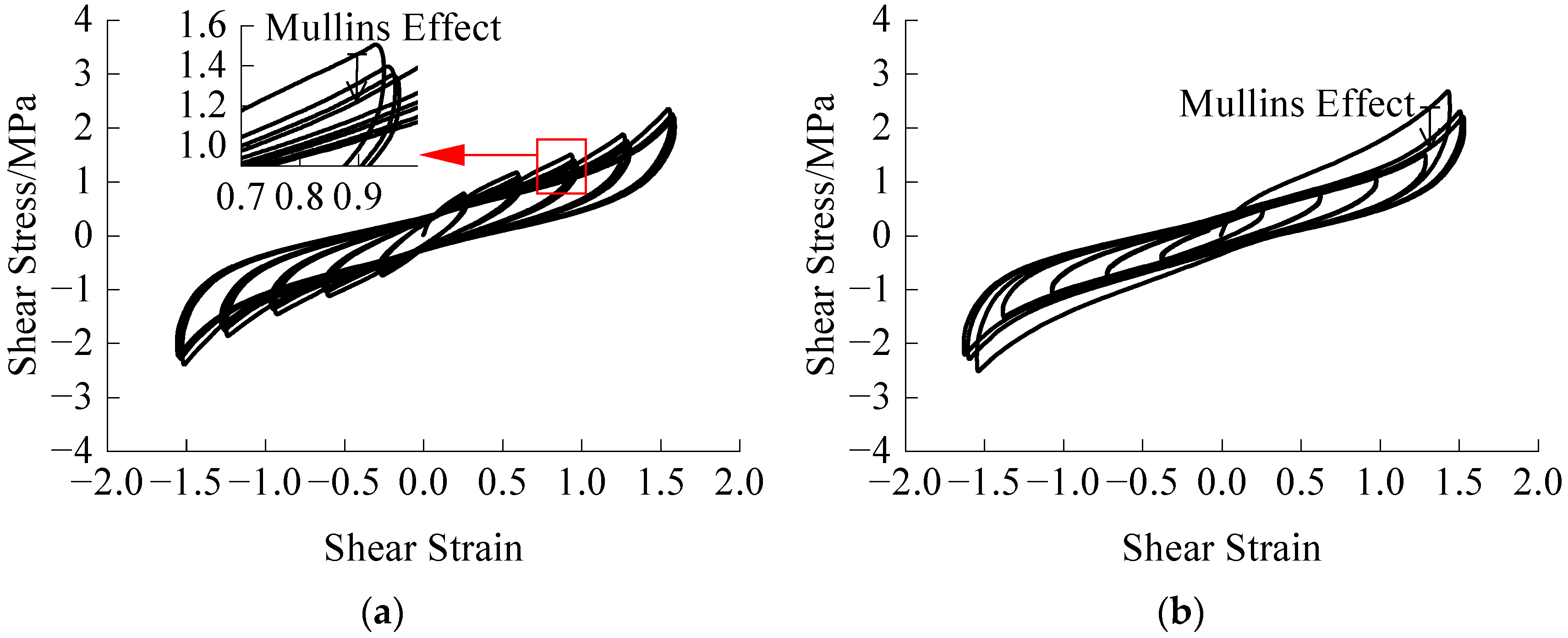
- The mechanical performance of HDR is significantly influenced by these factors. The Mullins effect is inevitable when HDR is used for seismic isolation.
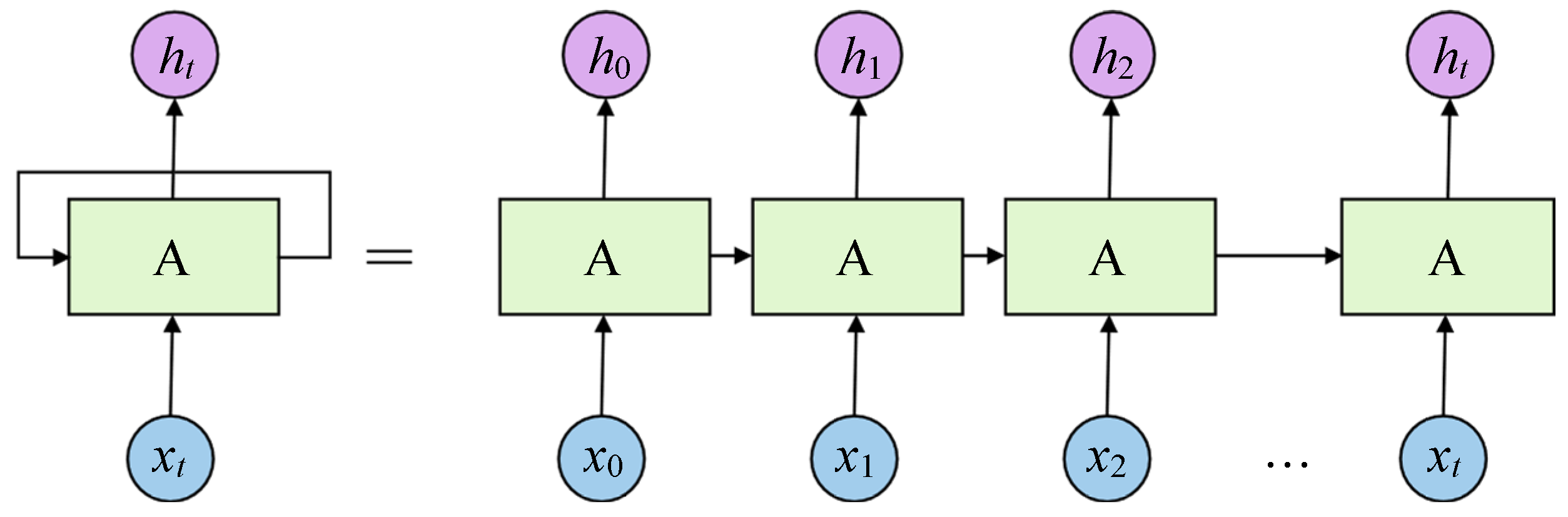
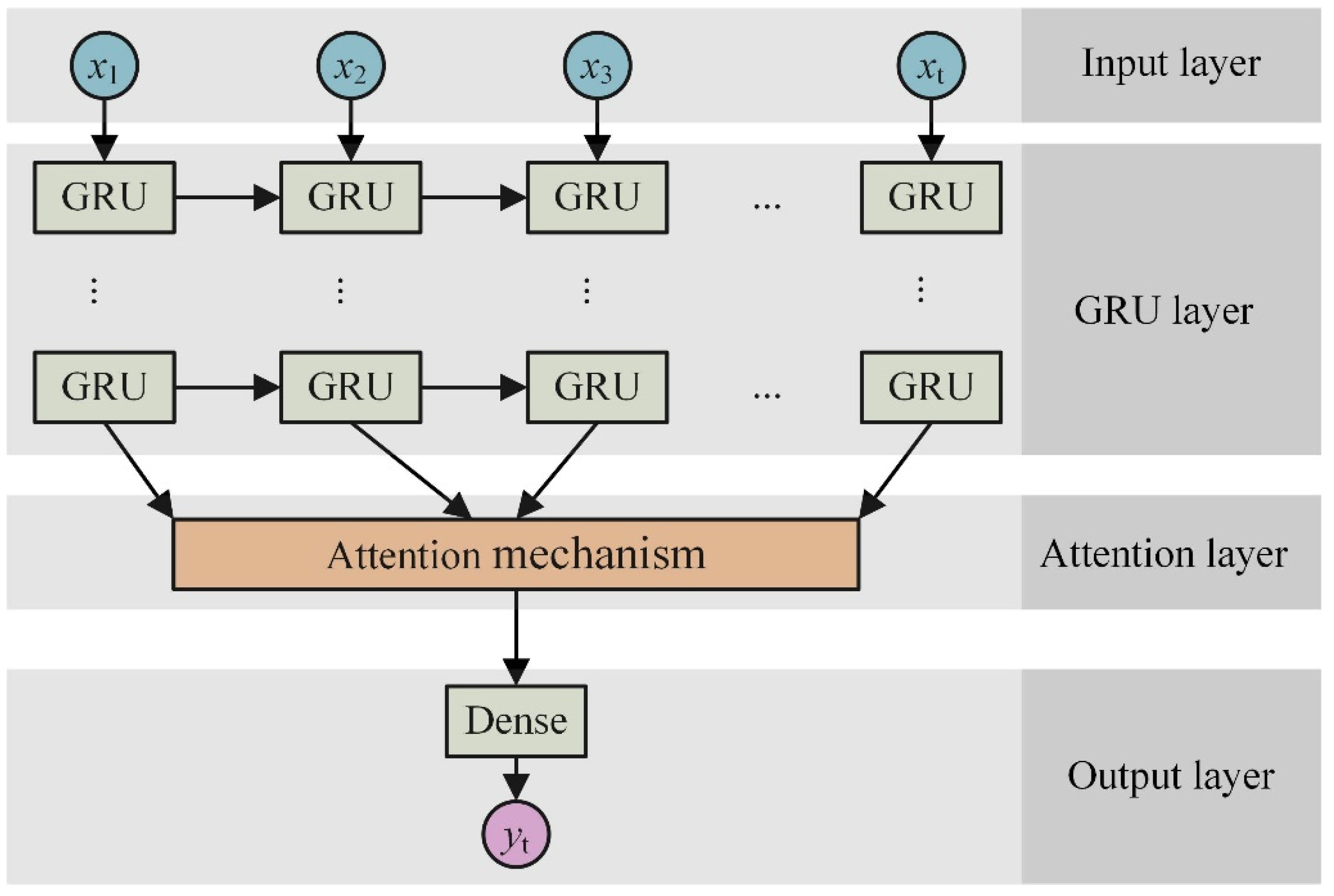
- For test data with distinct time series characteristics, RNN is the preferred method in deep learning. LSTM and GRU have improved capabilities in learning time series data. In this study, the GRU model is used to learn the compression-shear test data of HDR specimens, and the attention mechanism was introduced. As a result, the GRU + attention model is developed, providing a new perspective for research on the HDR constitutive model.
- The GRU + attention model demonstrates impressive predictive capabilities regarding the impact of the loading process. Additionally, the experienced amplitudes directly affect the stress-strain correlation of HDR during subsequent loading procedures.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, B.; Dai, J.; Guan, Q. Research and development of high-performance high-damping rubber materials for high-damping rubber isolation bearings: A review. Polymers 2022, 14, 2427. [Google Scholar] [CrossRef]
- Li, A.; Zhang, R.; Xu, G. Research progress on temperature dependence of rubber isolation bearings. J. Build. Struct. 2021, 42, 1–11. [Google Scholar]
- Fazekas, B.; Goda, T.J. Constitutive modelling of rubbers: Mullins effect, residual strain, time-temperature dependence. Int. J. Mech. Sci. 2021, 210, 106735. [Google Scholar] [CrossRef]
- Yao, X.; Wang, Z.; Ma, L.; Miao, Z.; Su, M.; Han, X.; Yang, J. Temperature Dependence of Rubber Hyper-Elasticity Based on Different Constitutive Models and Their Prediction Ability. Polymers 2022, 14, 3521. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Zhou, F.; Cui, J.; Huang, X.; Zhuang, X.; Ma, Y. Dependency test research of mechanical performance of HDR and its parametric value analysis. J. Earthq. Eng. Eng. Vib. 2012, 32, 95–103. [Google Scholar]
- Dung, N.A.; Phong, L.T. Low Temperature Effect on Dynamic Mechanical Behavior of High Damping Rubber Bearings. In Modern Mechanics and Applications: Select Proceedings of ICOMMA 2020; Springer: Singapore, 2022; pp. 203–218. [Google Scholar]
- Tachfiiana, E.; Li, K. Temperature Dependence of High Damping Rubber in Base-Isolated Structures. In Eleventh World Conference on Earthquake Engineering Paper No. 492; Elsevier Science Ltd.: Amsterdam, The Netherlands, 1996; ISBN 0-08-042822-3. [Google Scholar]
- Lion, A. On the large deformation behaviour of reinforced rubber at different temperatures. J. Mech. Phys. Solids 1997, 45, 1805–1834. [Google Scholar] [CrossRef]
- Wei, W.; Tan, P.; Yuan, Y.; Zhu, H. Experimental and analytical investigation of the influence of compressive load on rate-dependent high-damping rubber bearings. Constr. Build. Mater. 2019, 200, 26–35. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, S.; Zhu, H. Mechanical performance and shear constitutive model study of a new high-capacity polyurethane elastomeric bearing. Constr. Build. Mater. 2020, 232, 117227. [Google Scholar] [CrossRef]
- Guo, H.; Chen, Y.; Tao, J.; Jia, B.; Li, D.; Zhai, Y. A viscoelastic constitutive relation for the rate-dependent mechanical behavior of rubber-like elastomers based on thermodynamic theory. Mater. Des. 2019, 178, 107876. [Google Scholar] [CrossRef]
- Zhou, Y.; Shi, F.; Ozbulut, O.E.; Xu, H.; Zi, D. Experimental characterization and analytical modeling of a large-capacity high-damping rubber damper. Struct. Control. Health Monit. 2018, 25, e2183. [Google Scholar] [CrossRef]
- Oliveto, N.D.; Markou, A.A.; Athanasiou, A. Modeling of high damping rubber bearings under bidirectional shear loading. Soil Dyn. Earthq. Eng. 2019, 118, 179–190. [Google Scholar] [CrossRef]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef]
- Xiang, Y.; Zhong, D.; Rudykh, S.; Zhou, H.; Qu, S.; Yang, W. A Review of Physically Based and Thermodynamically Based Constitutive Models for Soft Materials. J. Appl. Mech. 2020, 87, 110801. [Google Scholar] [CrossRef]
- Yeoh, O.H. Characterization of Elastic Properties of Carbon-Black-Filled Rubber Vulcanizates. Rubber Chem. Technol. 1990, 63, 792–805. [Google Scholar] [CrossRef]
- Ogden, R.W.; Hill, R. Large deformation isotropic elasticity on the correlation of theory and experiment for incompressible rubberlike solids. Proc. R. Soc. Lond. A. Math. Phys. Sci. 1972, 326, 565–584. [Google Scholar] [CrossRef]
- Rivlin, R.S. Large Elastic Deformations of Isotropic Materials. I. Fundamental Concepts. Philos. Trans. R. Soc. London. Ser. A Math. Phys. Sci. 1948, 240, 459–490. [Google Scholar]
- Mooney, M. A Theory of Large Elastic Deformation. J. Appl. Phys. 1940, 11, 582–592. [Google Scholar] [CrossRef]
- He, H.; Zhang, Q.; Zhang, Y.; Chen, J.; Zhang, L.; Li, F. A comparative study of 85 hyperelastic constitutive models for both unfilled rubber and highly filled rubber nanocomposite material. Nano Mater. Sci. 2022, 4, 64–82. [Google Scholar] [CrossRef]
- Holt, W. Behavior of rubber under repeated stresses. Rubber Chem. Technol. 1932, 5, 79–89. [Google Scholar] [CrossRef]
- Mullins, L. Softening of rubber by deformation. Rubber Chem. Technol. 1969, 42, 339–362. [Google Scholar] [CrossRef]
- Mullins, L.; Tobin, N. Theoretical model for the elastic behavior of filler-reinforced vulcanized rubbers. Rubber Chem. Technol. 1957, 30, 555–571. [Google Scholar] [CrossRef]
- Mullins, L. Effect of stretching on the properties of rubber. Rubber Chem. Technol. 1948, 21, 281–300. [Google Scholar] [CrossRef]
- Gallardo, J.A.; de la Llera, J.C.; Restrepo, J.I.; Chen, M. A numerical model for non-linear shear behavior of high damping rubber bearings. Eng. Struct. 2023, 289, 116234. [Google Scholar] [CrossRef]
- Mahesh, B. Machine learning algorithms—A review. Int. J. Sci. Res. (IJSR) 2020, 9, 381–386. [Google Scholar]
- Sarker, I.H. Machine Learning: Algorithms, Real-World Applications and Research Directions. SN Comput. Sci. 2021, 2, 160. [Google Scholar] [CrossRef] [PubMed]
- Wei, J.; Chu, X.; Sun, X.-Y.; Xu, K.; Deng, H.-X.; Chen, J.; Wei, Z.; Lei, M. Machine learning in materials science. InfoMat 2019, 1, 338–358. [Google Scholar] [CrossRef]
- Shinde, P.P.; Shah, S. A review of machine learning and deep learning applications. ICCUBEA 2018, 1–6. [Google Scholar] [CrossRef]
- Shrestha, A.; Mahmood, A. Review of Deep Learning Algorithms and Architectures. IEEE Access 2019, 7, 53040–53065. [Google Scholar] [CrossRef]
- Mathew, A.; Amudha, P.; Sivakumari, S. Deep Learning Techniques: An Overview. In Advanced Machine Learning Technologies and Applications, Proceedings of the AMLTA 2020, Jaipur, India, 13–15 February 2020; Springer: Singapore, 2020; pp. 599–608. [Google Scholar] [CrossRef]
- Hewamalage, H.; Bergmeir, C.; Bandara, K. Recurrent neural networks for time series forecasting: Current status and future directions. Int. J. Forecast. 2021, 37, 388–427. [Google Scholar] [CrossRef]
- GB 20688.2-2006; Rubber Bearings Part II: Elastomeric Seismic-Protection Isolators for Bridges. Standards Press of China: Beijing, China, 2006.
- Olah, C. Understanding LSTM Networks. Available online: https://colah.github.io/posts/2015-08-Understanding-LSTMs (accessed on 27 August 2015).
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef] [PubMed]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Niu, Z.; Zhong, G.; Yu, H. A review on the attention mechanism of deep learning. Neurocomputing 2021, 452, 48–62. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Values | ||||
|---|---|---|---|---|---|---|
| Temperature | K | 253.15 | 268.15 | 283.15 | 298.15 | 313.15 |
| Loading rate | mm·s−1 | 1 | 2 | 4 | 8 | 16 |
| Loading amplitude | % | 40 | 80 | 120 | 160 | 200 |
| Parameters | Units | Values | |||||
|---|---|---|---|---|---|---|---|
| Temperature | K | 260.65 | 275.65 | 290.65 | 305.65 | ||
| Loading rate | mm·s−1 | 12 | |||||
| Loading amplitude | % | 40 | 80 | 120 | 160 | 200 | |
| Parameters | Values |
|---|---|
| Batch size | 64 |
| Initial learning rate | 0.001 |
| Verification set percent | 20% |
| Optimizer | Adam |
| Early stopping epochs | 5 |
| Hidden Units | 32 | 64 | 128 | 256 | 512 | 1024 |
|---|---|---|---|---|---|---|
| Values | ||||||
| Hidden Layers | ||||||
| GRU (1 Layer) | 0.9927 | 0.9899 | 0.9918 | 0.9956 | 0.9937 | 0.9960 |
| GRU (2 Layers) | 0.9954 | 0.9942 | 0.9949 | 0.9958 | 0.9956 | 0.9939 |
| GRU (1 Layer) + attention | 0.9906 | 0.9918 | 0.9959 | 0.9959 | 0.9965 | 0.9955 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Peng, T. Developing a New Constitutive Model of High Damping Rubber by Combining GRU and Attention Mechanism. Polymers 2024, 16, 567. https://doi.org/10.3390/polym16050567
Li F, Peng T. Developing a New Constitutive Model of High Damping Rubber by Combining GRU and Attention Mechanism. Polymers. 2024; 16(5):567. https://doi.org/10.3390/polym16050567
Chicago/Turabian StyleLi, Feng, and Tianbo Peng. 2024. "Developing a New Constitutive Model of High Damping Rubber by Combining GRU and Attention Mechanism" Polymers 16, no. 5: 567. https://doi.org/10.3390/polym16050567
APA StyleLi, F., & Peng, T. (2024). Developing a New Constitutive Model of High Damping Rubber by Combining GRU and Attention Mechanism. Polymers, 16(5), 567. https://doi.org/10.3390/polym16050567