

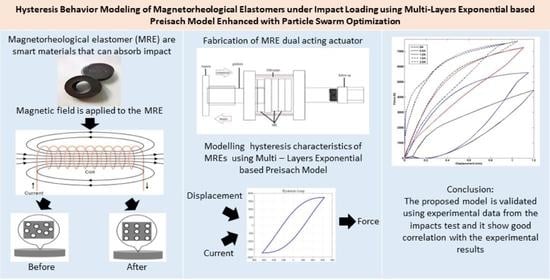
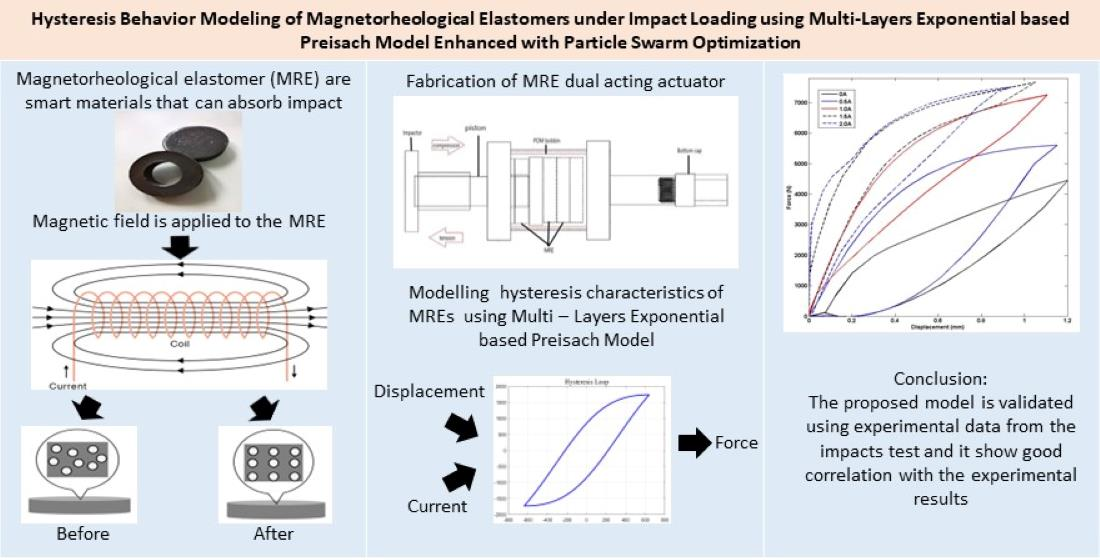
Hysteresis Behavior Modeling of Magnetorheological Elastomers under Impact Loading Using a Multilayer Exponential-Based Preisach Model Enhanced with Particle Swarm Optimization



Abstract
1. Introduction
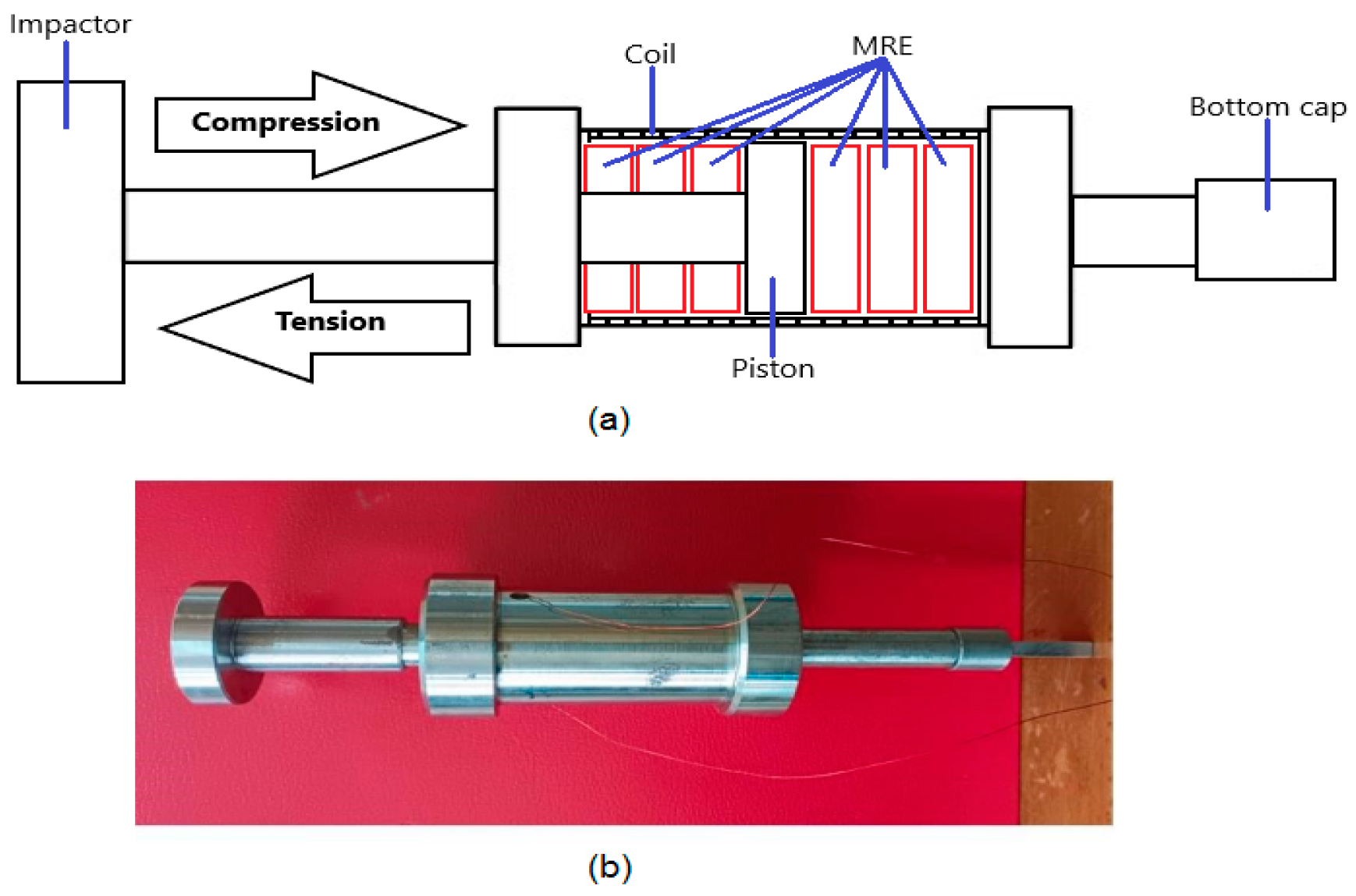
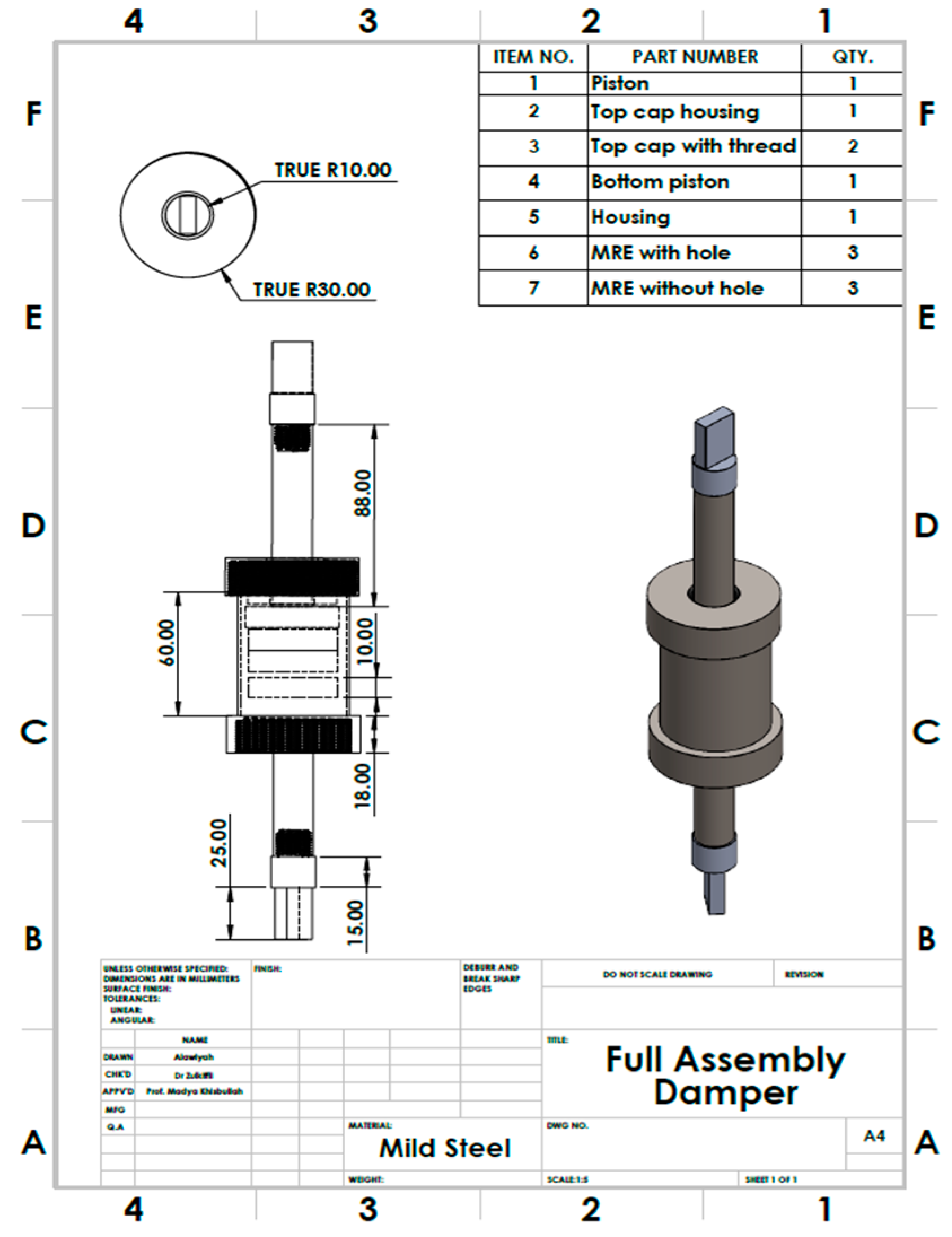
2. Design and Fabrication of MRE-Based Double Acting Actuator
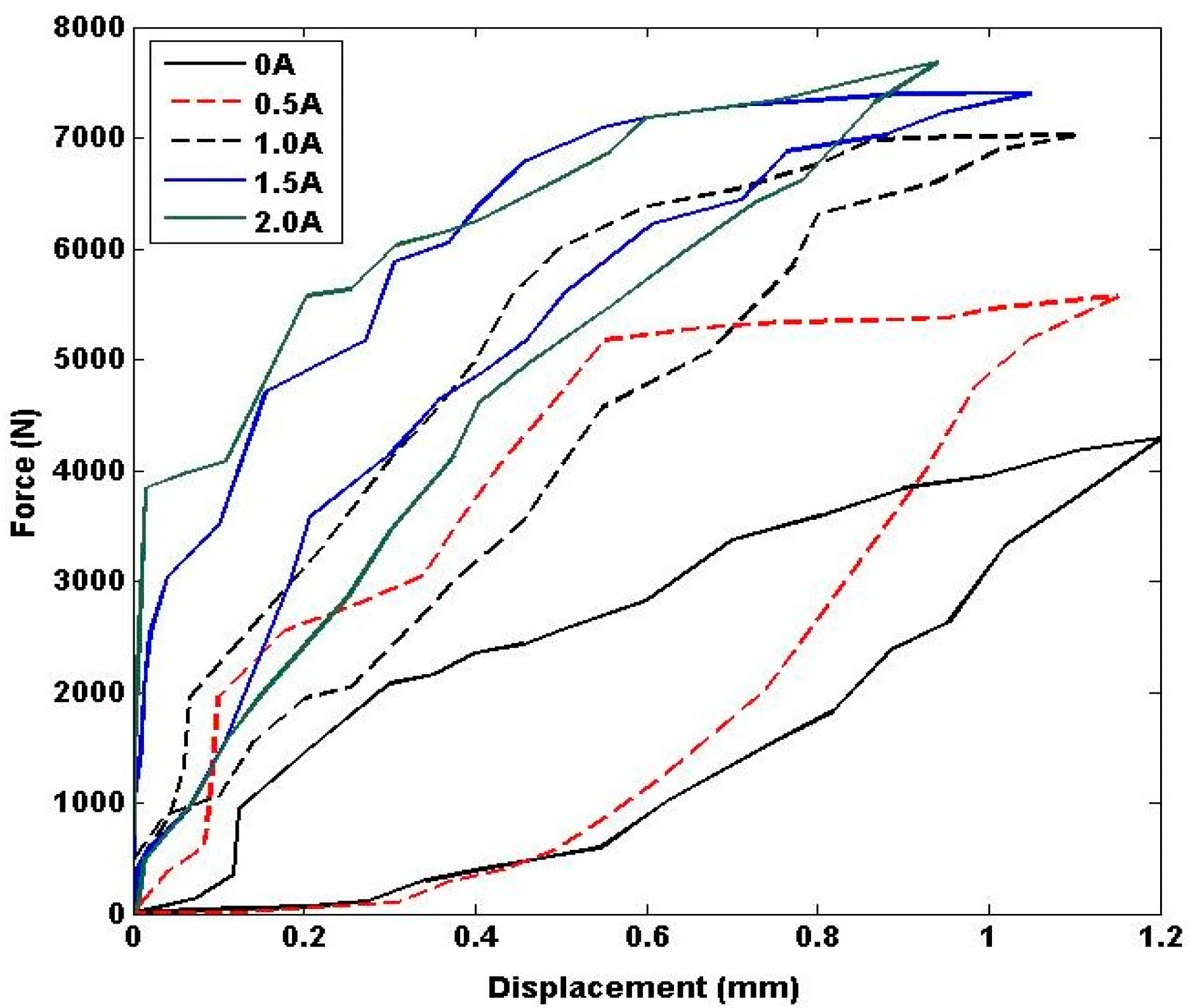
3. Experimental Study on the Force-Displacement Characteristics of MREs for Impact Response
4. Modeling the Hysteresis Characteristics of MREs Using a Multilayer Exponential-Based Preisach Model Optimized with PSO
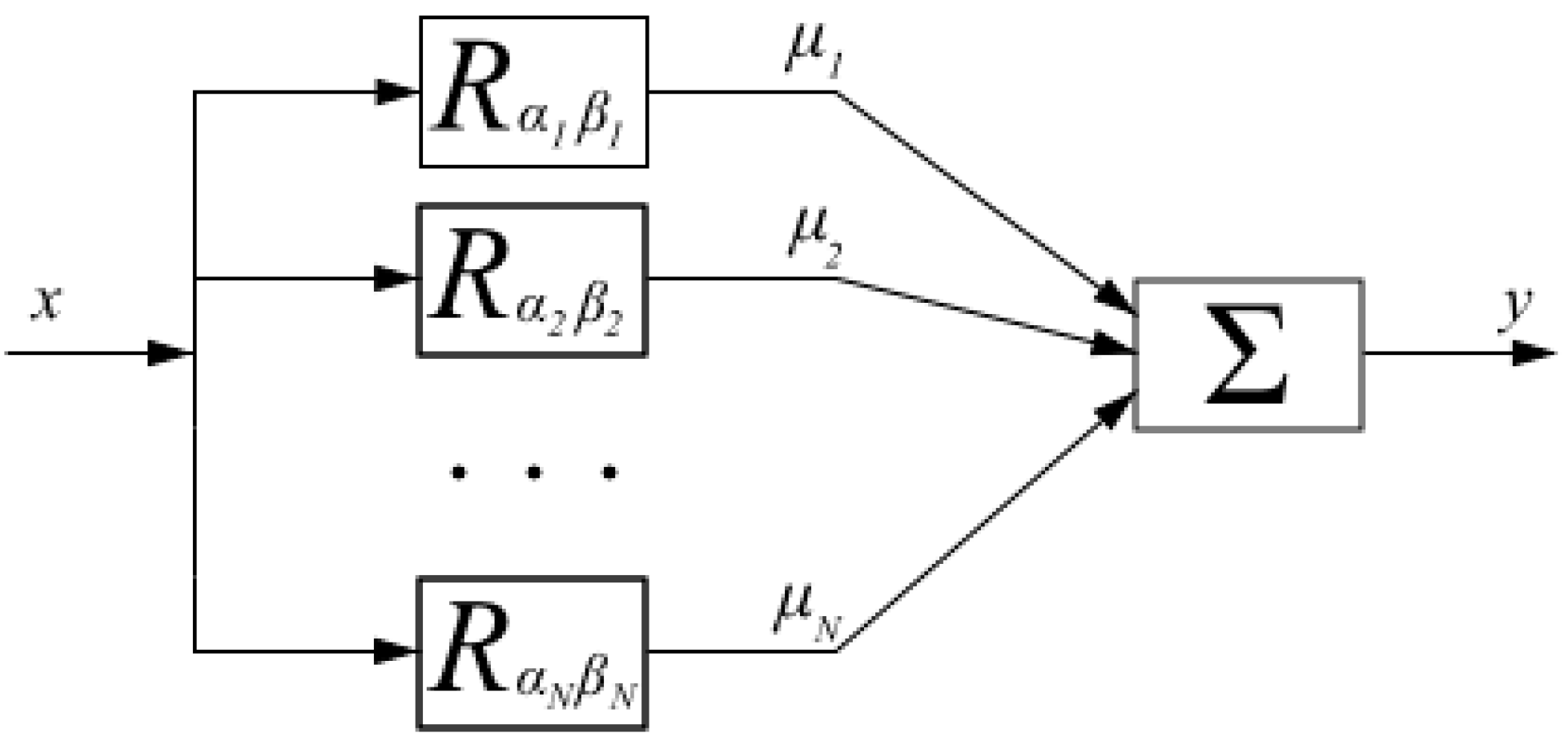
4.1. Multilayer Exponential-Based Preisach Model
4.2. Optimization of Multilayers Sigmoidal Functions Using PSO
- Initialization: A population of particles is generated randomly in the search space. Each particle represents a potential solution to the optimization problem.
- Evaluation: The fitness of each particle is evaluated based on the objective function to be optimized.
- Update of the particle’s best position: Each particle keeps track of the best position it has visited so far, denoted as Pbest. If the fitness of the current position is better than its Pbest, the particle updates its Pbest.
- Update of the swarm’s best position: The best position among all the Pbest positions of the particles is denoted as Gbest. If the fitness of the current Gbest position is better than its previous value, the swarm updates its Gbest.
- Update of the particle’s velocity and position: Each particle updates its velocity and position based on its current velocity, its distance from its Pbest, and its distance from the Gbest. The velocity and position updates are given by the following equations:
- 6.
- Termination: The algorithm terminates when a stopping criterion is met, such as reaching a maximum number of iterations or a satisfactory fitness level.
- 7.
- By iterating through these steps, the particles in the swarm collectively move toward the optimal solution of the optimization problem.
- Swarm size: 40
- Maximum number of iterations: 100
- Inertia weight: 0.9
- Acceleration coefficients ( and ): 1.42
5. Results and Discussions
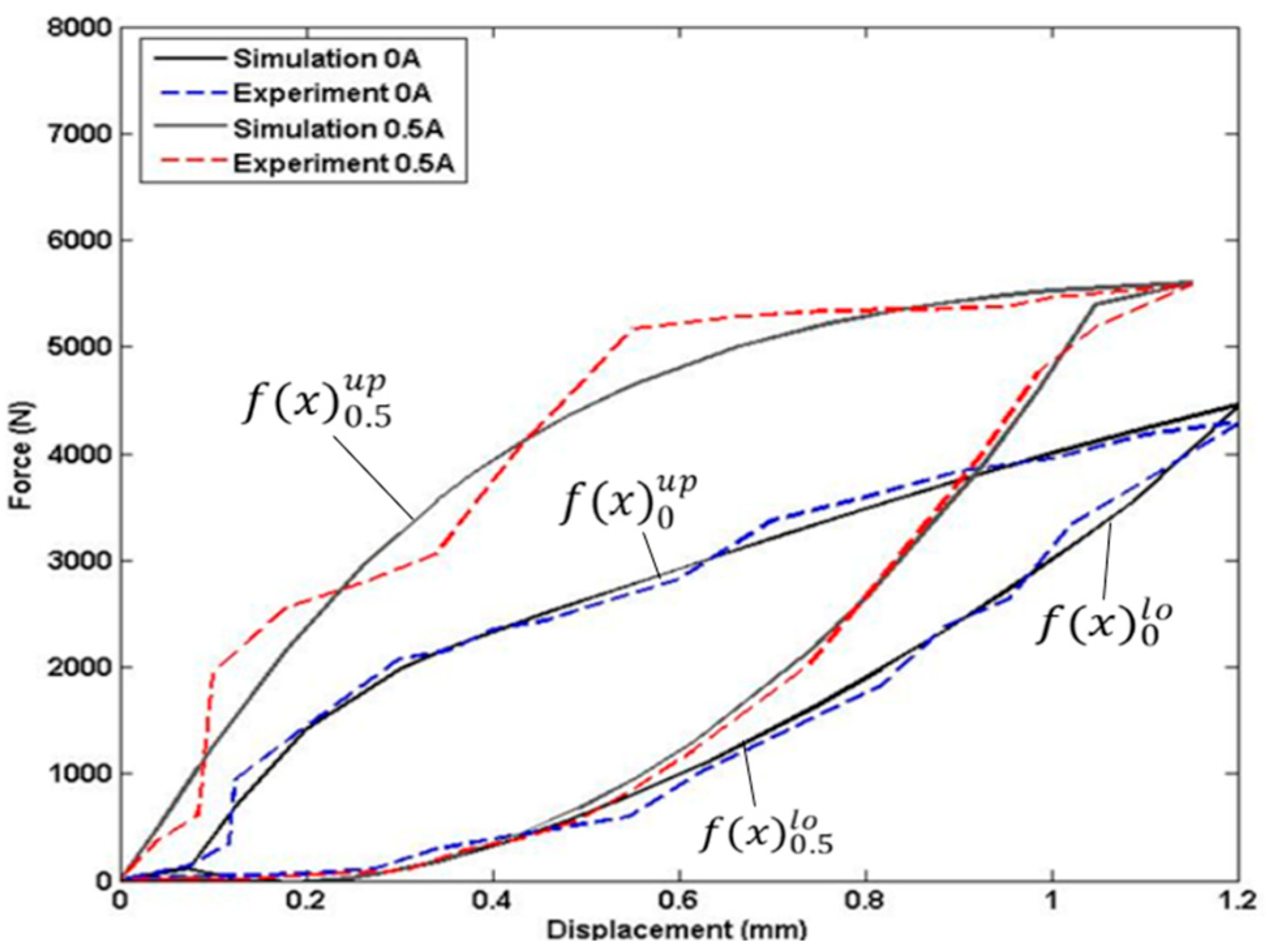
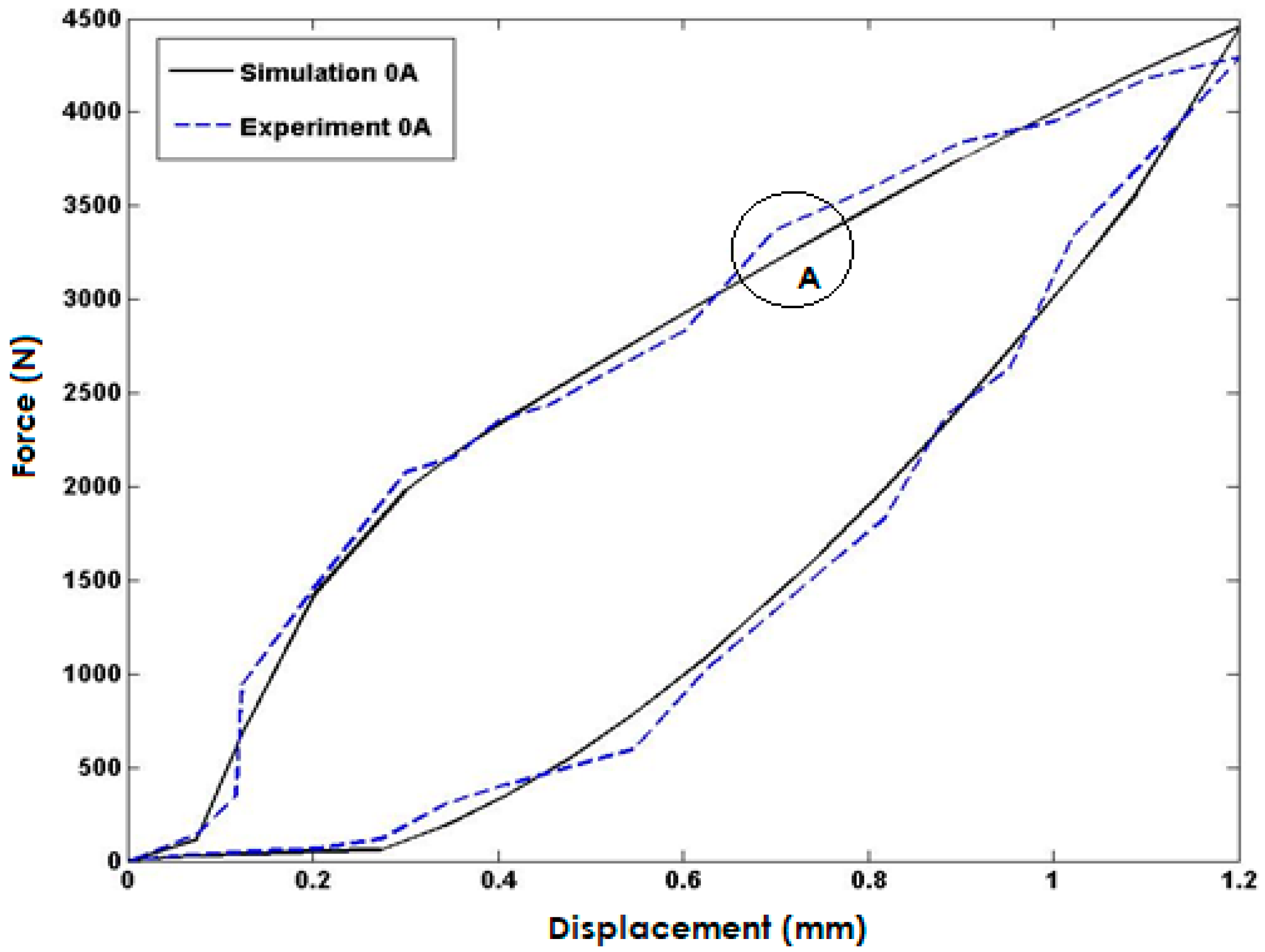
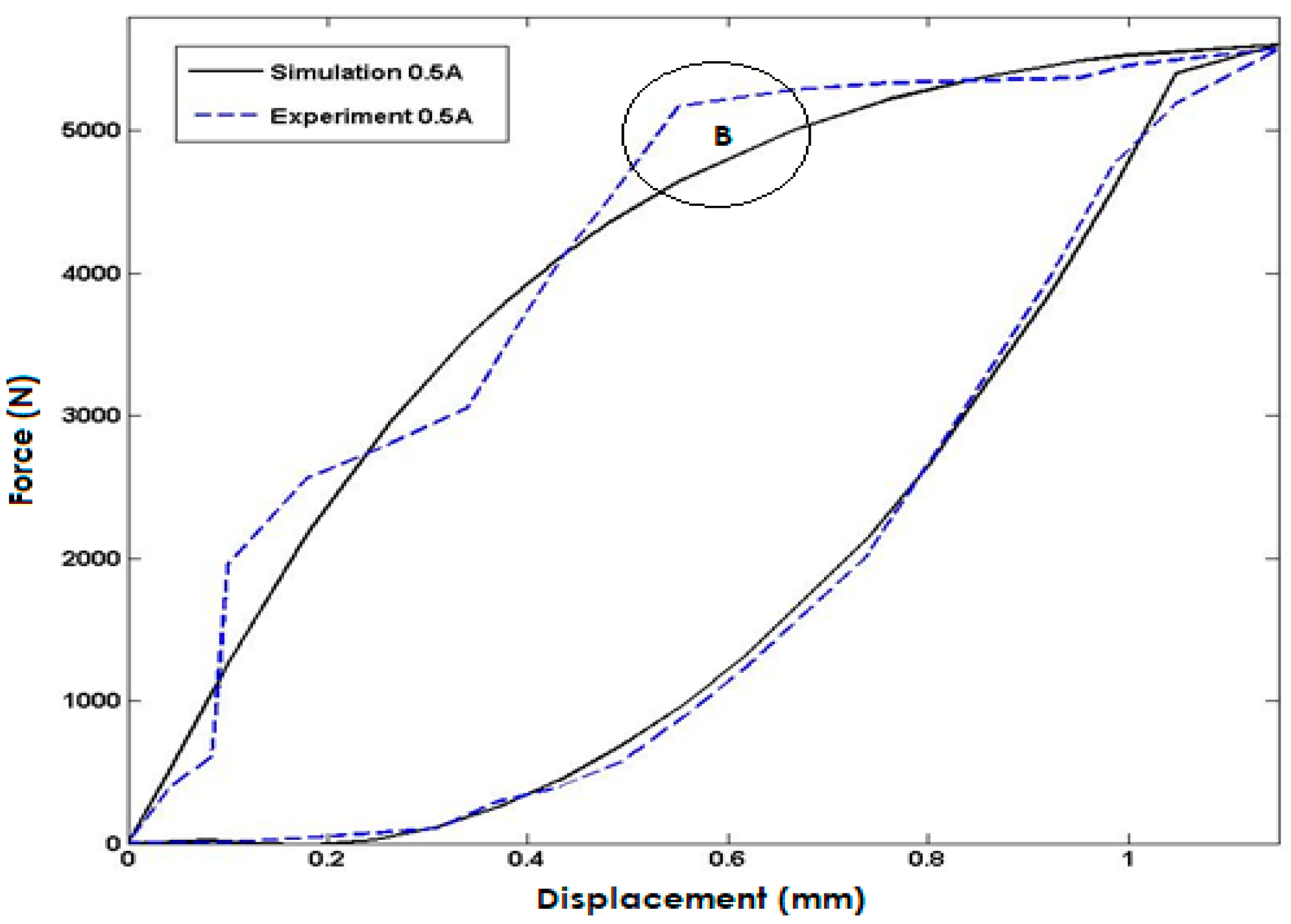
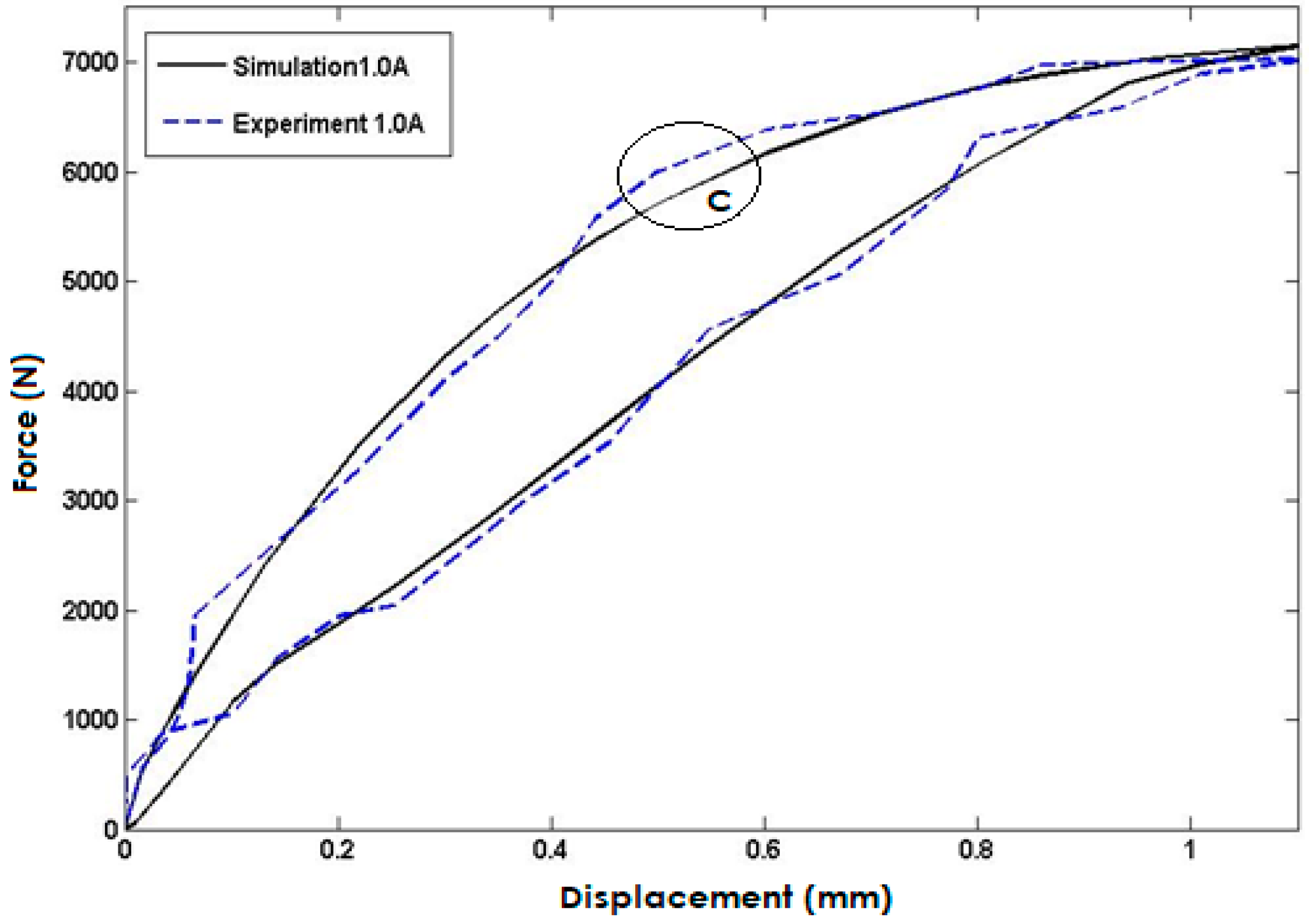
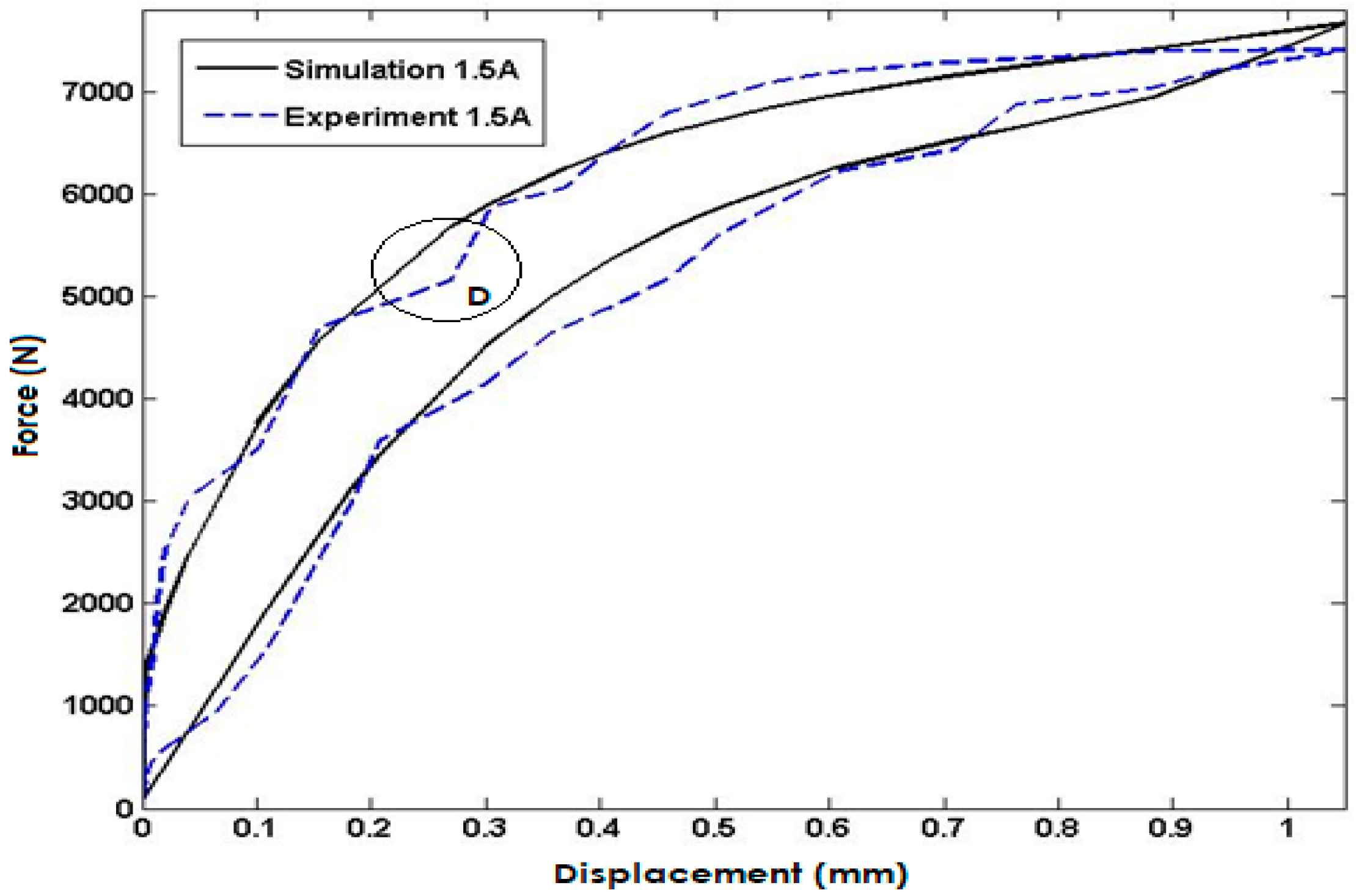
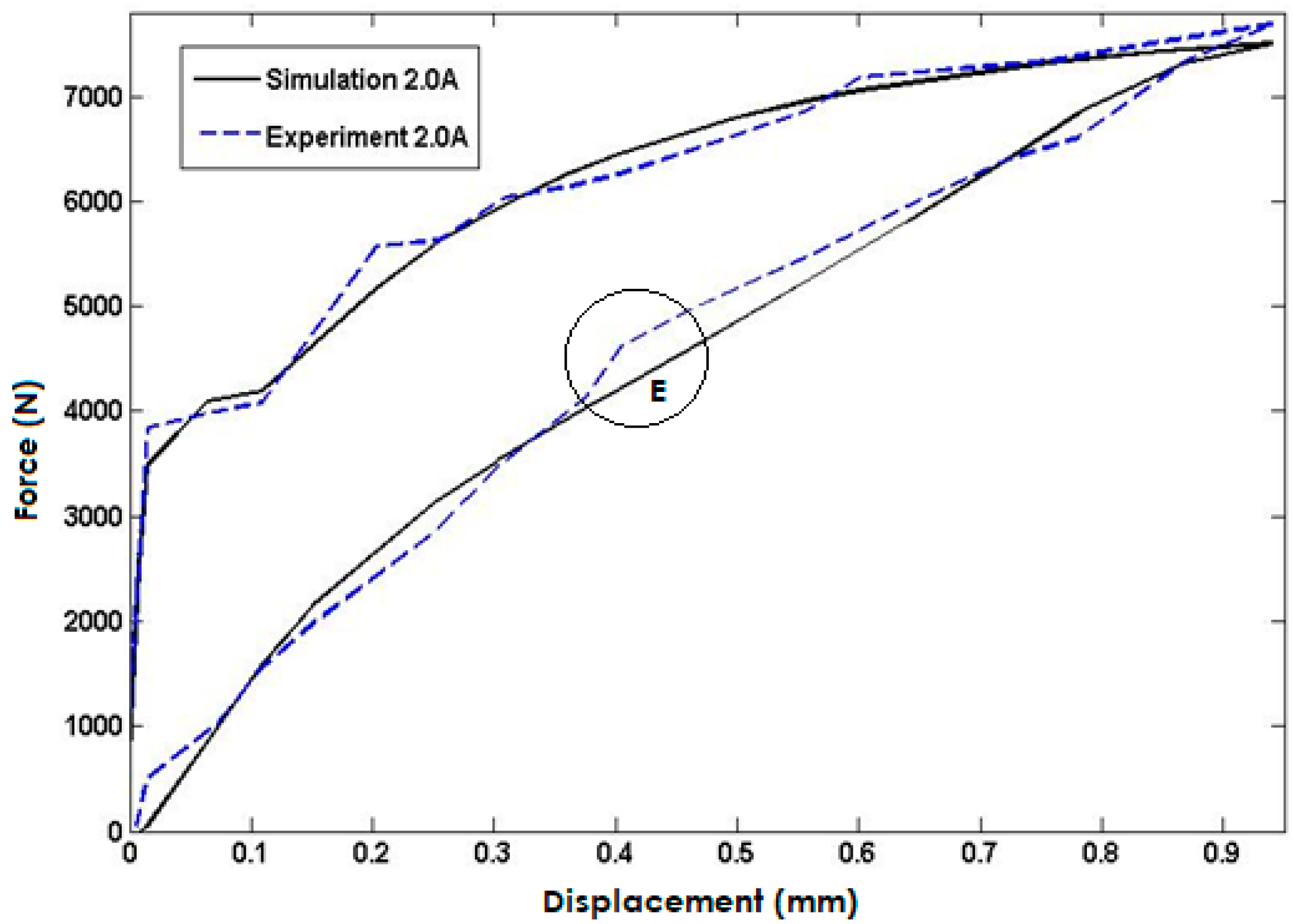
5.1. Comparison between the Simulated Response of Multilayer Exponential-Based Preisach Model with the Experimental Data
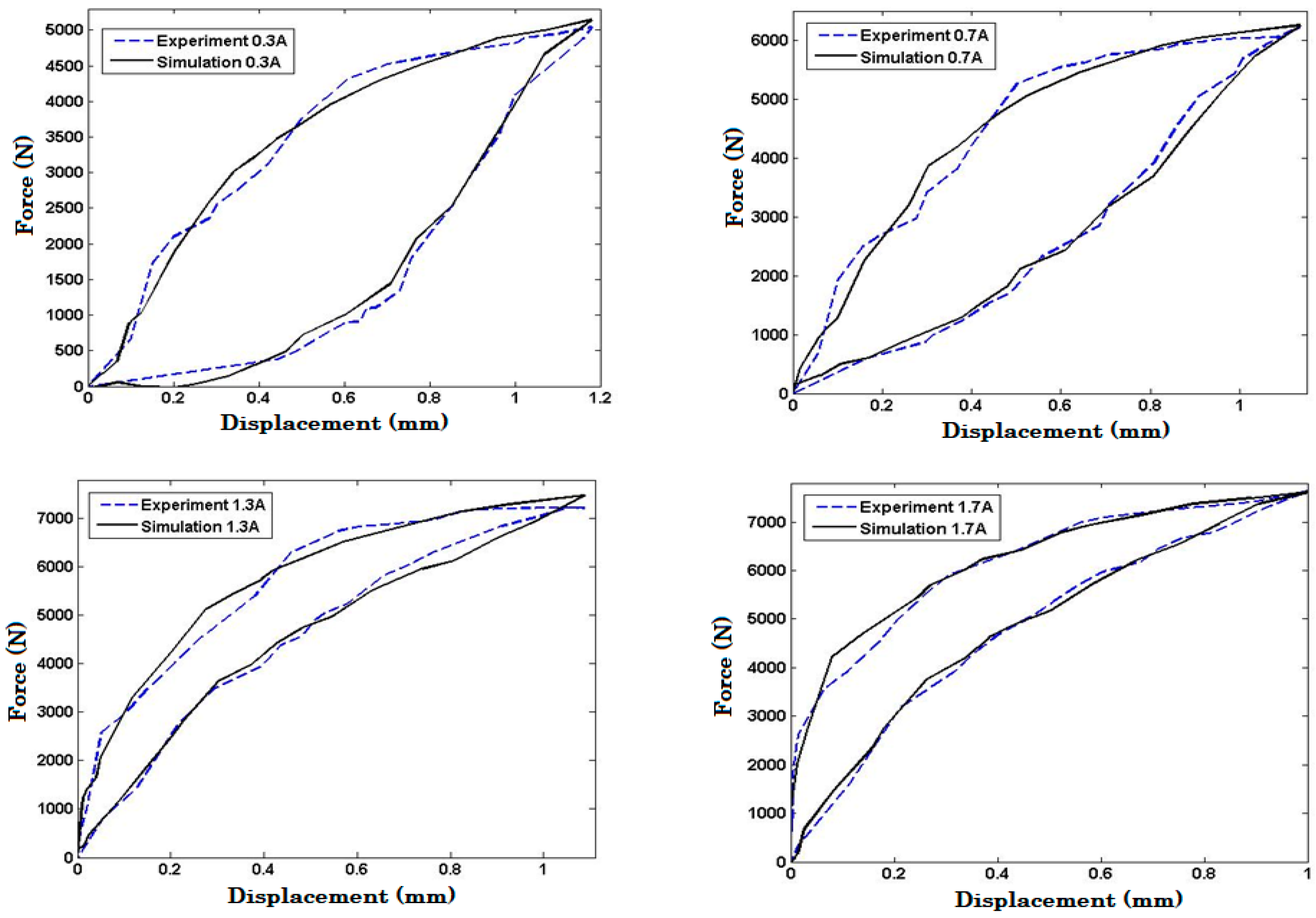
5.2. Validation of the Interpolated Model
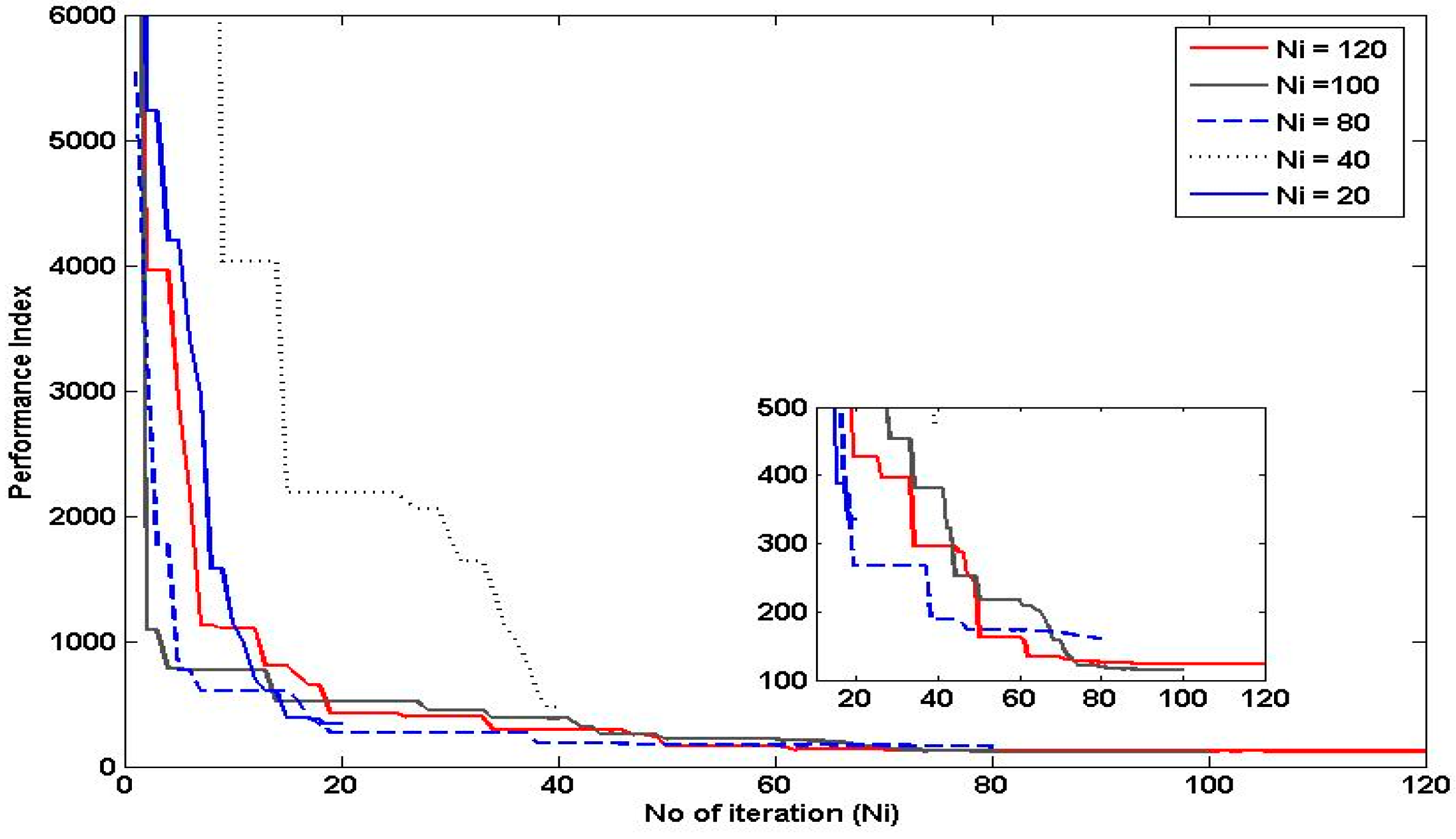
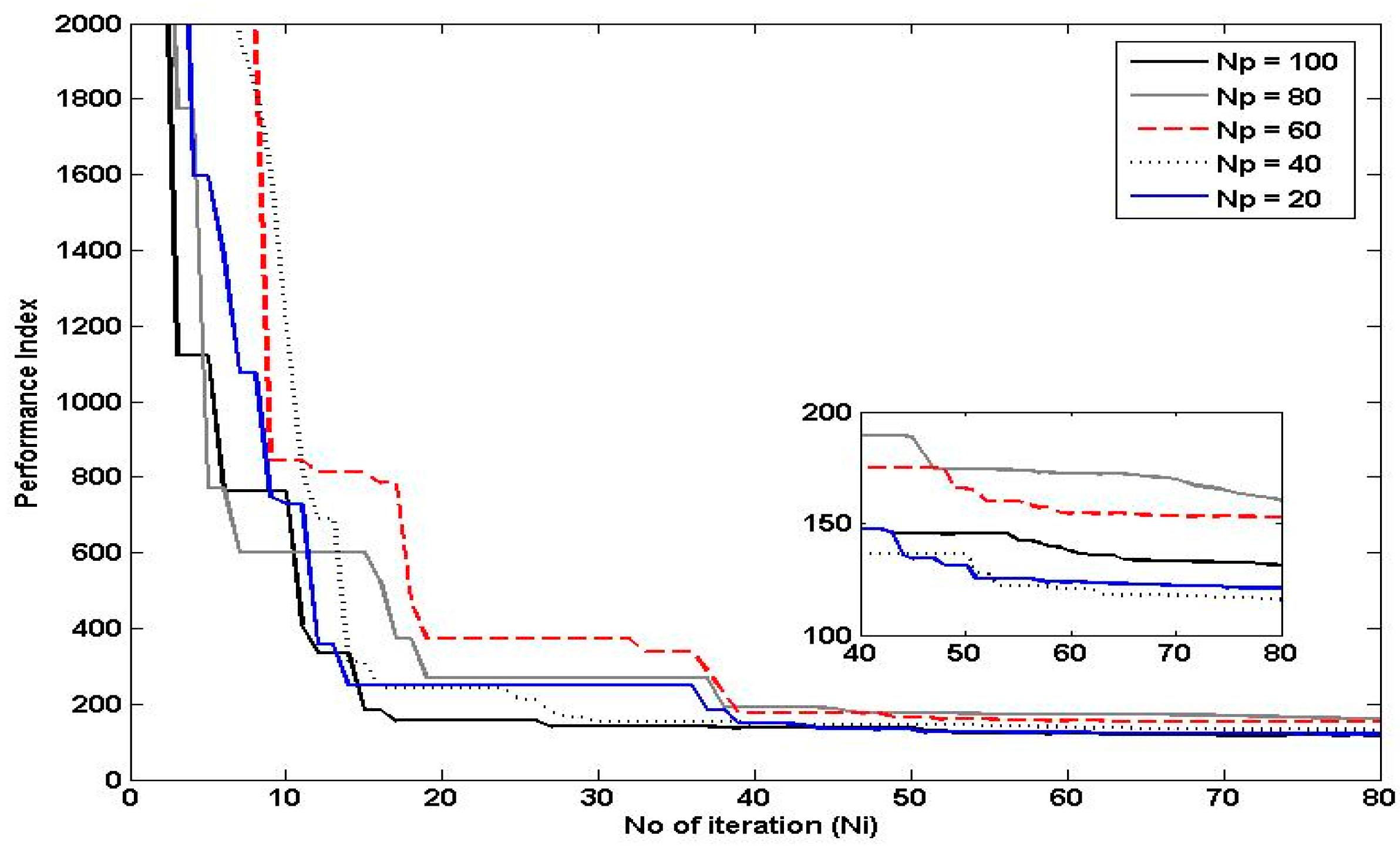
5.3. Effects of Varying Swarm Size and the Number of Iterations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Arslan Hafeez, M.; Usman, M.; Umer, M.A.; Hanif, A. Recent Progress in Isotropic Magnetorheological Elastomers and Their Properties: A Review. Polymers 2020, 12, 3023. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Li, J.; Li, W.; Du, H. A state-of-the-art review on magnetorheological elastomer devices. Smart Mater. Struct. 2014, 23, 12. [Google Scholar] [CrossRef]
- Kang, S.; Choi, K.; Nam, J.D. Magnetorheological Elastomers: Fabrication, Characteristics, and Applications. Materials 2020, 13, 4597. [Google Scholar] [CrossRef] [PubMed]
- Masa’id, A.; Lenggana, B.W.; Ubaidillah, U.; Susilo, D.D.; Choi, S.-B. A Review on Vibration Control Strategies Using Magnetorheological Materials Actuators: Application Perspective. Actuators 2023, 12, 113. [Google Scholar] [CrossRef]
- Li, R.P.; Du, C.B.; Guo, F.; Yu, G.J.; Lin, X.G. Performance of Variable Negative Stiffness MRE Vibration Isolation System. Adv. Mater. Sci. Eng. 2015, 9, 1–8. [Google Scholar] [CrossRef]
- Sun, S.; Yang, J.; Yildirim, T.; Ning, D.; Zhu, X.; Du, H.; Zhang, S.; Nakano, M.; Li, W. A magnetorheological elastomer rail damper for wideband attenuation of rail noise and vibration. J. Intell. Mater. Syst. Struct. 2020, 31, 220–228. [Google Scholar] [CrossRef]
- Bira, N.; Dhagat, P.; Davidson, J.R. A Review of Magnetic Elastomers and Their Role in Soft Robotics. Front. Robot. 2020, 7, 1–9. [Google Scholar] [CrossRef]
- Ubaidillah; Mazlan, S.A.; Sutrisno, J.; Zamzuri, H. Potential applications of magnetorheological elastomers. Appl. Mech. Mater. 2014, 663, 695–699. [Google Scholar] [CrossRef]
- Brancati, R.; Di Massa, G.; Pagano, S.; Strano, S. Seismic isolation system for lightweight structures based on MRE devices. Lect. Notes Eng. Comput. Sci. 2015, 2218, 1313–1318. [Google Scholar]
- Skalski, P.; Kalita, K. Implementation of Magnetorheological Elastomers in Transport. Trans. Inst. Aviat. 2016, 245, 189–198. [Google Scholar] [CrossRef]
- Sedlacik, M.; Ronzova, A.; Munteanu, A.; Kutalkova, E.; Drohsler, P.; Moucka, R.; Kracalik, M.; Bilek, O.; Mazlan, S.A. Reprocessed magnetorheological elastomers with reduced carbon footprint and their piezoresistive properties. Sci. Rep. 2022, 12, 1–12. [Google Scholar]
- Jaafar, M.F.; Mustapha, F.; Mustapha, M. Review of current research progress related to magnetorheological elastomer material. J. Mater. Res. Technol. 2021, 15, 5010–5045. [Google Scholar] [CrossRef]
- Pokaad, A.Z.B.; Hudha, K.; Nasir, M.Z.B.M. Simulation and experimental studies on the behaviour of a magnetorheological damper under impact loading. Int. J. Struct. Eng. 2011, 2, 164–187. [Google Scholar] [CrossRef]
- He, H.W.; Wang, Z.H.; Zou, Z.J.; Liu, Y. Nonparametric modeling of ship maneuvering motion based on self-designed fully connected neural network. Ocean Eng. 2022, 251, 111113. [Google Scholar] [CrossRef]
- Taheri, S.M.; Hesamian, G. Non-parametric statistical tests for fuzzy observations: Fuzzy test statistic approach. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 145–153. [Google Scholar] [CrossRef]
- Thorson, J.T.; Taylor, I.G. A comparison of parametric, semi-parametric, and non-parametric approaches to selectivity in age-structured assessment models. Fish 2014, 158, 74–83. [Google Scholar] [CrossRef]
- Wang, T.; Zhi-Wen, Z. A new type of nonlinear hysteretic model for magnetorheological elastomer and its application. Mater. Lett. 2021, 301, 130176. [Google Scholar] [CrossRef]
- Shahar, S.F.M.; Mazlan, S.A.; Johari, N.; Johari, M.A.F.; Aziz, S.A.A.; Khairi, M.H.A.; Nordin, N.A.; Hapipi, N.M. Mechanical Properties and Microstructural Behavior of Uniaxial Tensile-Loaded Anisotropic Magnetorheological Elastomer. Actuators 2022, 11, 306. [Google Scholar] [CrossRef]
- Brancati, R.; Di Massa, G.; Di Vaio, M.; Pagano, S.; Santini, S. Experimental Investigation on Magneto-Rheological Elastomers; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 68. [Google Scholar]
- Zhang, B.; Cao, Y.; Qie, J. Study on the dynamic mechanical properties of magnetorheological elastomer (MRE). J. Intell. Mater. Syst. Struct. 2022, 33, 1115–1125. [Google Scholar] [CrossRef]
- Hudha, K.; Sobri, N.S.; Sumasundram, K.; Haniffah, N.A.; Kadir, Z.A.; Rahmat, M.S. Investigation on the Effect of the Ferrous Particles Size on the Impact Absorption Capability of Magnetorheological Elastomer. In Proceedings of the 2022 IEEE 18th International Colloquium on Signal Processing & Applications, Selangor, Malaysia, 12 May 2022; pp. 299–303. [Google Scholar]
- Kuczmann, M.M. Dynamic Preisach hysteresis model. J. Adv. Res. Phys. 2010, 1, 1–5. [Google Scholar]
- Natale, C.; Velardi, F.; Visone, C. Identification and compensation of Preisach hysteresis models for magnetostrictive actuators. Phys. B Condens. Matter. 2001, 306, 161–165. [Google Scholar] [CrossRef]
- Willerich, S.; Herzog, H.G. A continuous vector preisach model based on vectorial relay operators. IEEE Trans. Magn. 2020, 56, 1–4. [Google Scholar] [CrossRef]
- Nguyen, P.B.; Choi, S.B.; Song, B.K. Development of a novel diagonal-weighted Preisach model for rate-independent hysteresis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 961–976. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Chan, C.L.; Chen, C.L. A cautious PSO with conditional random. Expert Syst. Appl. 2015, 42, 4120–4125. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Percentage |
|---|---|
| RTV Silicone Rubber | 30% |
| Carbonyl Iron Powder | 60% |
| Additive (Ferrite) | 7% |
| Hardener (Isocyanates) | 3% |
| Parameters | Input Values |
|---|---|
| Impact Energy | 13.8 J |
| Impact Velocity | 2.24 m/s |
| Falling Height | 256 mm |
| Total Mass | 5.5 kg |
| Current | 0–2 A |
| Contact area | 13.87 cm2 |
| Current | Experimental Data | Simulation Data | Percentage of Error (%) |
|---|---|---|---|
| 0 A | 3374.804 | 3206.756 | 4.98 |
| 0.5 A | 5171.588 | 4642.620 | 10.23 |
| 1.0 A | 6008.422 | 5718.536 | 4.83 |
| 1.5 A | 7093.411 | 6762.593 | 4.66 |
| 2.0 A | 5572.439 | 5123.559 | 8.1 |
| Current | Experimental Data | Simulation Data | Percentage Error (%) |
|---|---|---|---|
| 0.3 A | 4321.450 | 3954.718 | 8.486 |
| 0.7 A | 5263.420 | 5072.986 | 3.618 |
| 1.3 A | 6746.820 | 6518.139 | 3.389 |
| 1.7 A | 4982.910 | 4707.04 | 5.536 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohd. Alawi, A.H.; Hudha, K.; Kadir, Z.A.; Amer, N.H. Hysteresis Behavior Modeling of Magnetorheological Elastomers under Impact Loading Using a Multilayer Exponential-Based Preisach Model Enhanced with Particle Swarm Optimization. Polymers 2023, 15, 2145. https://doi.org/10.3390/polym15092145
Mohd. Alawi AH, Hudha K, Kadir ZA, Amer NH. Hysteresis Behavior Modeling of Magnetorheological Elastomers under Impact Loading Using a Multilayer Exponential-Based Preisach Model Enhanced with Particle Swarm Optimization. Polymers. 2023; 15(9):2145. https://doi.org/10.3390/polym15092145
Chicago/Turabian StyleMohd. Alawi, Alawiyah Hasanah, Khisbullah Hudha, Zulkiffli Abd. Kadir, and Noor Hafizah Amer. 2023. "Hysteresis Behavior Modeling of Magnetorheological Elastomers under Impact Loading Using a Multilayer Exponential-Based Preisach Model Enhanced with Particle Swarm Optimization" Polymers 15, no. 9: 2145. https://doi.org/10.3390/polym15092145
APA StyleMohd. Alawi, A. H., Hudha, K., Kadir, Z. A., & Amer, N. H. (2023). Hysteresis Behavior Modeling of Magnetorheological Elastomers under Impact Loading Using a Multilayer Exponential-Based Preisach Model Enhanced with Particle Swarm Optimization. Polymers, 15(9), 2145. https://doi.org/10.3390/polym15092145