
From Nature to Technology: Exploring Bioinspired Polymer Actuators via Electrospinning




Abstract
:
1. Introduction
2. Biomimetic Inspiration for Synthetic Actuators
3. Hydrogel Actuators Created by Electrospinning
3.1. Hydrogel Actuators with Water and Temperature Sensitivity
3.2. Light- and Electric Field-Responsive Hydrogel Actuators
3.3. Hydrogel Actuators with Multistimulus Response

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stimulus | Materials and Solvents | Morphology | Electrospinning Conditions | Application | Ref. |
|---|---|---|---|---|---|
| Water | PVP/PAA active layer; polyimide film passive layer; Solvent: DMF | Fiber diameter: 0.91–1.14 µm; thickness active layer 18–47 µm and passive layer 55 µm | Voltage: 8–10.2 kV; feed rate: 0.8 mL/h; distance: 15 cm; rotational speeds: 180–2000 rpm | Robotics, energy harvesting, sensors | [56] |
| PCL/PEG polyurethane linked with lysine methylester diisocyanate; Solvents: THF/DMF | Fiber diameter: 810 nm; thickness: 0.38 mm | Voltage: 13 kV feed rate: 0.3 mL/h; distance: 10 cm; rotational speed: 400 rpm | Water-responsive sensors, medical devices | [63] | |
| PCL/PEG/PDMS polyurethane linked with 1,6 hexamethylene diisocyanate; Solvent: HFIP | – | Voltage: 10 kV; feed rate: 0.5–1 mL/h | – | [64] | |
| Heat | NIPAM-ABP; Solvent: DMF | Fiber diameter: 1.1–1.3 µm; thickness: 0.2 mm | Voltage: 15 kV; feed rate: 0.3 mL/h; distance: 15 cm; temperature: 25–30 °C; humidity: 15–30% | Artificial skin, smart separation membranes, tissue engineering | [20] |
| P(NIPAM-ABP) active layer, polyurethane (Desmopan DP 2590) passive layer; Solvent: DMF | Fiber diameter: passive layer 238 nm and active layer 477 nm; thickness: passive layer 40 µm and active layer 15–100 µm | Voltage: 22 kV (passive layer) and 10.9 kV (active layer); feed rate: 0.6 mL/h; rotational speed: 30 rpm | Porous 3D bioscaffolds, electrodes, superfast actuators | [57] | |
| P(NIPAM-ABP) with CNC; Solvents: DMF/formamide | Fiber diameter: 0.14–0.17 µm | Voltage: 24 kV; feed rate: 0.3 mL/h; distance: 20 cm | Tissue engineering | [58] | |
| P(NIPAM-ABP) active layer, polyurethane (Desmopan DP 2590) passive layer; Solvent: DMF | Fiber diameter: passive layer 501 nm and active layer 1368 nm; thickness: passive layer 18 µm and active layer 53 µm; porosity: 56% | Voltage: 18 kV; feed rate: 1.3 mL/h; distance: 20 cm; rotational speed: 850 rpm | – | [59] | |
| P(NIPAM-ABP); Solvent: DMF and 3D printed PNIPAM/Laponite XLG patterns | Fiber diameter: 1.3 µm; thickness: 86 µm; porosity: 40% | Voltage: 25 kV | – | [60] | |
| Light | P(NIPAM-ABP) active layer; Solvent: DMF; Coating of the active layer using APS and pyrrole; PEG-cellulose nanofiber hydrogel as passive layer | Fiber diameter: 560 nm; thickness: 15 µm | Voltage: 14.2 kV; feed rate: 0.6 mL/h; distance: 14 cm; rotational speed: 1000 rpm | Biomimetic devices (starfish’s crawling movement) | [65] |
| Electricity | AA, AAM, PEG, PVA, aniline; Solvent: water | Fiber diameter: 120–520 nm | Voltage: 15 kV | Wearables and soft robots | [66] |
| Heat and NIR light | P(NIPAM-ABP) active layer and PAN/Fe3O4 passive layer; Solvent: DMF | Fiber diameter: active layer 0.83 µm and passive layer 0.24 µm; thickness: active layer 150 µm and passive layer 50 µm | Active layer: voltage: 13.4–15.7 kV; feed rate: 0.8 mL/h; distance: 15 cm; rotational speed: 1000 rpm Passive layer: voltage: 16.2–19.4 kV; feed rate: 1 mL/h; distance: 20 cm; rotational speed: 20 rpm | Smart materials, bio-mimetic systems | [67] |
| Heat and pH | P(NIPAM-AA-ABP) active layer; Solvent: DMF polyurethane; (Desmopan DP 2590) passive layer; Solvent: THF | Fiber diameter: 905 nm; thickness: active layer 35.5–37.6 µm and passive layer 16.2–18.6 µm | Voltage: 14.3 kV; feed rate: 0.66 mL/h; distance: 8 cm; rotational speed: 1200 rpm | Sensors, artificial muscles, biomedical applications | [68] |
| PAA/EGDE active layer; Solvent: ethanol; PNIPAM 2 active layer; Solvent: THF/DMF; PCL passive layer; Solvent: trifluoroethanol; Layers were soaked in a crosslinkable PEG solution | Fiber diameter: active layer 392 nm and passive layer 1.28 µm nm; thickness: active layer 26.8 µm and passive layer 112.3 µm | Voltage: 7 kV; feed rate: 1 mL/h; distance: 13 cm; temperature: 25 °C; humidity: 50%; rotational speed: 1200 rpm | 4D scaffolds, artificial muscles, biomedical devices, soft robots | [69] |
4. Electrospun Shape-Memory Polymer (SMP) Actuators
4.1. Covalently Crosslinked Electrospun SMP Actuators
4.2. Physically Crosslinked Electrospun SMP Actuators
5. Electrospun Electroactive Actuators
Electroactive Actuators for Manufacturing Artificial Muscles
6. Electrospun Actuators Based on Liquid Crystalline Elastomers (LCEs)

| Composition and Design | Morphology | Fabrication of Nonwovens | Electrical and Mechanical Properties | Biocompatibility | Applications | Ref. |
|---|---|---|---|---|---|---|
| CA matrix with PANI nanoparticles (0.1 wt% or 0.5 wt%) dispersed | Membranes’ thickness: 100 µm | Electrospinning: Needle inner diameter: 0.21 mm; Applied voltage: 20 kV; Distance to collector: 20 cm; Solution flow rate: 2.0 mL/h; Solution concentration: 20 wt/v% in DMAc/acetone 2:1 v/v | Ionic conductivity: 8.7·10−4 S·cm−1 in pure CA, 10.6·10−4 S·cm−1, and 19.2·10−4 S·cm−1 in 0.1 wt% and 0.5 wt% CA/PANI samples, respectively | Fibroblast cell line (NIH/3T3) attachments and spreading over the electrospun membranes were observed | A dry PANI/CA bio-composite actuator showing electrically driven bending deformations | [27] |
| CA matrix with fullerenol (0.1 wt% or 0.5 wt%) dispersed | Nanofibers’ diameter range: 400–800 nm; Membranes’ thickness: 100 µm | Electrospinning: Solution (20 wt/v%) of cellulose acetate in DMAc/acetone (2:1 v/v) with 0.1 or 0.5 wt% fullerenols; Needle inner diameter: 0.21 mm; Applied voltage: 25 kV; Distance to collector: 15 cm; Solution flow rate: 2.0 mL/h | Ionic conductivity: 8.2·10−4 S·cm−1 in CA, 11.5·10−4 S·cm−1, and 18.1·10−4 S·cm−1 in 0.1 wt% and 0.5 wt% CA/fullerenol samples; Tensile strength of CA fibers: 1.6 MPa; Tensile strength of CA fibers with 0.5 wt% fullerenol: 2.75 MPa | All electrospun nanofibers did not show any inhibition of Escherichia coli K-12 bacteria on agar plates, indicating a good biocompatibility of the membranes | Biocompatible actuators | [97] |
| PVA/PANI nanofibers deposited on interdigitated electrodes | Fiber diameter between 100 and 200 nm; density of nanofibers: 106 nanofibers per square centimeter | Electrospinning: Applied voltage: 20 kV; Distance to collector: 13 cm; Solution flow rate: 0.5 mL/h; Solution concentration: 4% or 5% (v/v) in water; Speed of collector: 400 rpm | Electrical conductivity: 4% solution: 10−5 S·m−1; 5% solution: 3·10−6 S·m−1 | No data | Gas sensor for ammonia detection | [90] |
| Composite meshes of PANI and well-blended PLCL/SF with NGF incorporated | Fiber diameter between 683 ± 138 and 411 ± 98 nm; average thicknesses of meshes were between 0.032 and 0.037 mm | Electrospinning of PLCL/SF/PANI nanofibers: Needle inner diameter: 0.51 mm; Applied voltage: 12 kV; Distance to collector: 5–6 cm; Solution flow rate: 1.0 mL/h; Solution concentration: 4% (v/v) in water; Speed of collector: 4000 rpm NGF-loaded PLCL/SF/PANI core–shell fibers were fabricated by coaxial electrospinning | Electrical conductivity: 30.5 ± 3.1 mS cm−1; Tensile strength from 5.7 ± 0.9 MPa to 13.7 ± 1.5 MPa depends on composition | Effective support of rat pheochromocytoma 12 (PC12) neurite outgrowth, increased percentage of neurite-bearing cells and the median neurite length; enhanced proliferation and decrease in the toxicity effect of PANI in Schwann cells | Electrical stimulation and nerve growth factor (NGF) on neuron growth | [91] |
| Blends of PANI and PLCL | Fiber diameter between 100 and 800 nm | Electrospinning of PANI/PLCL: Solution concentration (v/v %): 15:85 in HFP (0.515 g/mL); Needle inner diameter: 0.337 mm; Applied voltage: 18–20 kV; Distance to collector: 20 cm; Solution flow rate: 20 µL/min; Speed of collector: 2600 rpm | Electrical conductivity: about 0.00641 S·cm−1 | Based on viability tests, morphological changes, and expression of differentiation proteins in PC12 cells, PANI/PLCL fibers enhanced the NGF-induced neurite outgrowth of PC12 cells | Development of electrically conductive, engineered nerve grafts | [92] |
| PEDOT nanofibers obtained on the electrospun PVP | Fiber diameter of 350 ± 60 nm | (1) Electrospinning of PVP: Needle inner diameter: 0.58 mm; Applied voltage: 27 ± 1 kV; Distance to collector: 15 cm; Solution flow rate: 1.0 mL/h; Solution concentration: 1.0 and 1.5 wt% in iron(III) p-TS 40 wt% in butanol (2) In situ vapor-phase polymerization of EDOT (3) Removal of PVP | Electrical conductivity: 60 ± 10 S·cm−1 | No data | Electronic devices requiring flexibility and/or significant surface area, such as sensors or energy storage systems | [94] |
| The PVA/PANI hybrid mat consisted of PANI nanostructures grown on the surface of individual nanofibers; in the wet state, mats were rolled up conveniently into a multilayered cylindrical structure | Diameter of PVA nanofibers: 450 nm; individual PVA/PANI fibers: 1.2 µm diameter of PANI nanostructures: <70 nm | (1) Electrospinning of PVA: Applied voltage: 10 kV; Distance to collector: 12 cm; Solution flow rate: 10 μL/min; Solution concentration: 7.5 wt% PVA in water (2) In situ chemical polymerization of aniline on PVA mats | Electrical conductivity: 2.35 S·cm−1 | No data | For fabricating high-performance electrochemical actuators | [95] |
| PANI/gelatin fibers | Fiber diameter decreased from 803 ± 121 nm for pure gelatin fibers to 61 ± 13 nm for 60:40 PANI–gelatin blend fibers. | Electrospinning of PANI/Gelatin: Volume ratios of PANI:gelatin were 0:100, 15:85, 30:70, 45:55, and 60:40. The following concentrations (w/v) of the solutions in HFP were 8.00, 6.85, 5.69, 4.54, and 3.38%, respectively. Applied voltage: 10 kV; Distance to collector: 10 cm | Sample with 45:55 ratio of PANI to gelatin; Tensile strength: 10.49 ± 0.96 MPa; Elongation at break: 0.09 ± 0.03%; Tensile modulus: 1384 ± 105 MPa; Conductivity (S·cm−1): 0.005, 0.01, 0.015, 0.017, and 0.021 for volume ratios of PANI to gelatin of 0:100, 15:85, 30:70, 45:55, and 60:40, respectively | PANI–gelatin blend fibers supported H9c2 rat cardiac myoblast cell attachment and proliferation to a similar degree as the control tissue culture-treated plastic (TCP) and smooth glass substrates | “Intelligent” biomaterials for cardiac and neuronal tissue engineering | [98] |
| SF scaffolds coated with PPy | PPy-SF mesh: 80–90 µm thickness | (1) Electrospinning of SF: Needle inner diameter: 0.45 mm; Applied voltage: +6 kV was applied to the capillary tube and −5 kV to the collector; Distance to collector: 10 cm; Solution flow rate: 6.0 mL/h; Solution concentration: 17 wt/v% in HFIP; (2) Polymerization of pyrrole on the SF meshes | Young’s modulus range: 266.7 ± 17.3 MPa for the SF meshes and 310.5 ± 37.6 MPa for the PPy-SF meshes; Voltametric responses ranging between 10 and 0.5 mV·s–1 | Uncoated and PPy-coated materials support the adherence and proliferation of adult human mesenchymal stem cells (ahMSCs) or human fibroblasts (hFbs) | Biocompatible actuators | [100] |
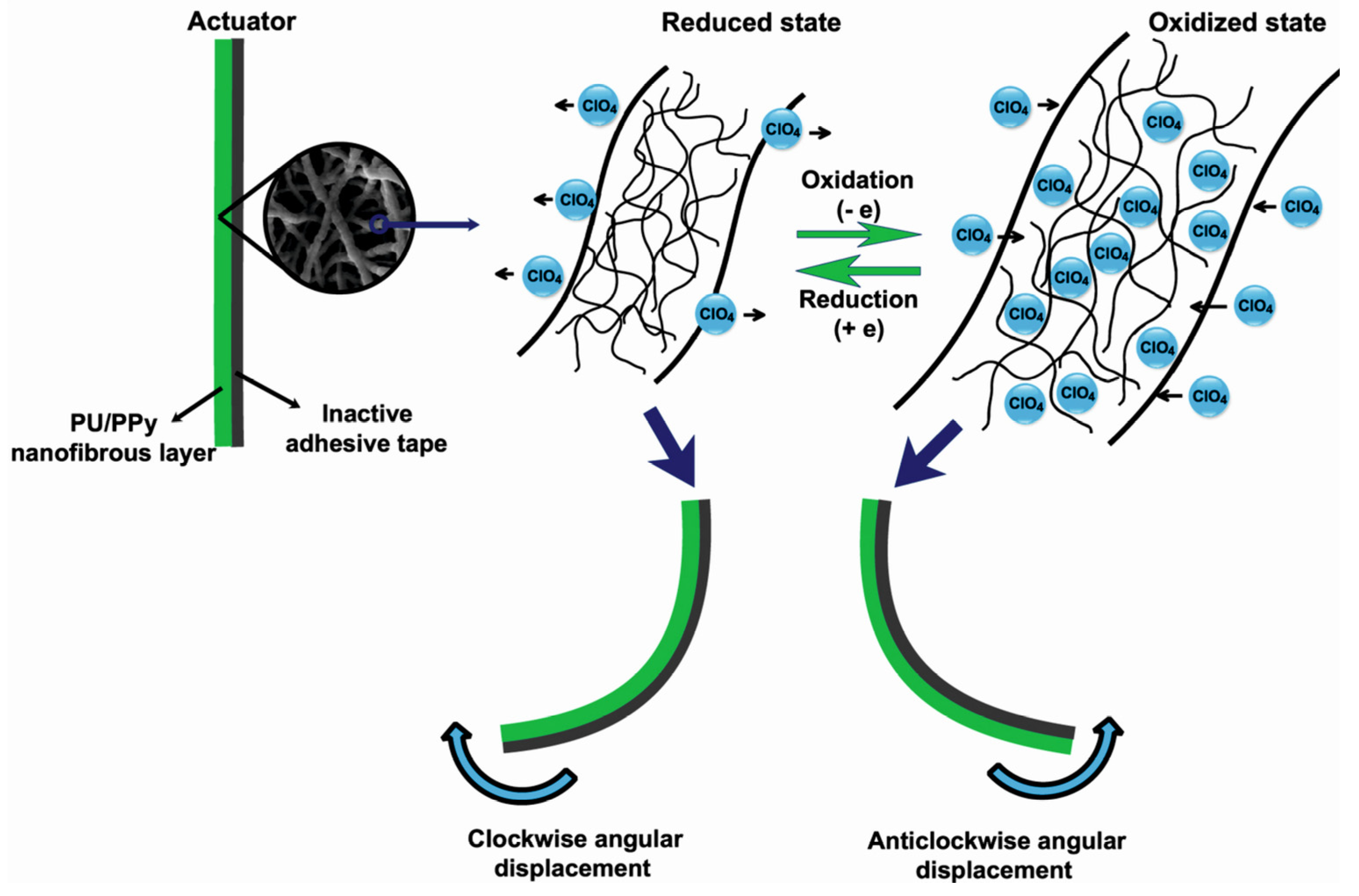
| Nanofibrous PU/PPy | Thickness of the PU, PU/PPy-ClO4, PU/PPy-pTS, and PU/PPy-TFSI nanofibers: 10 ± 1, 24 ± 2, 23 ± 2, and 43 ± 3 µm, respectively; Diameter of PU/PPy nanofibers: 719 ± 74 nm, 571 ± 73 nm, and 556 ± 77 nm, respectively, for ClO4, pTS, and TFSI dopants. | (1) Electrospinning of PU: Needle inner diameter: 0.718 mm; Applied voltage: 14 kV; Distance to collector: 25 cm; Solution flow rate: 0.3 mL/h; Speed of the collector: 5 rps; Solution concentration: 7 wt/v% in DMF (2) Polymerization of pyrrole on the PU meshes | The electrical conductivity of PU/PPy nanofibers produced using ClO4, pTS, and TFSI dopants was measured to be 158, 277, and 315 S·cm−1. In LiTFSI electrolyte solution, the PU/PPy nanofibrous artificial muscle achieved a bending displacement of 720° in a potential cycle between −0.8 and +0.8 V. | No data | Nanofibrous artificial muscles | [102] |
| PU/PPy-pTS nanofibers | Diameter of PU nanofibers: 221 ± 30 nm; Coated nanofibers: 566 ± 67 nm | (1) Electrospinning of PU: Applied voltage: 10, 12, and 14 kV; Distance to collector: 15, 20, and 25 cm; Solution flow rate: 0.3 mL/h; Solution concentration: 7, 8, and 9 wt/v% in DMF (2) Polymerization of pyrrole and sodium p-TS on the PU meshes | Conductivity of 276.34 S·cm−1; Reversible angular displacement capability about of 141° | No data | Artificial muscles | [103] |
| PANI/Au microtubes | The inner diameters of PANI/Au microtubes in the range of 1.2–1.5 µm | (1) Electrospinning of PMMA: Applied voltage: 20 kV; Distance to collector: 17 cm; Solution flow rate: 0.5 mL/h; Solution concentration: 10 wt/v% in DMF; Collector rotation speed: 2000 rpm (2) Coating fibers with Au (3) Electrochemical PANI deposition process (4) Removal of PMMA by immersing in DCM | By switching the voltage between −0.2 and 1 V, PANI-coated microtubes could reversibly bend | No data | Artificial muscles | [108] |
| PU/PANI hybrid nanofibrous bundle | Diameter of individual hybrid nanofibers in the bundles: about 900 nm; Average diameter of PU/PANI hybrid nanofibrous bundle: about 90 µm; Average diameter of PU nanofiber: about 400 nm; Thickness of PANI coating: about 250 nm | (1) Electrospinning of PU: Needle inner diameter: 0.337 mm; Applied voltage: +7 kV in the capillary tube and −5 kV in the collector; Distance to collector: 13 cm; Solution flow rate: 4.0 µL/min; Solution concentration: 10 wt% in chloroform (2) In situ chemical polymerization of aniline | Conductivity of 0.5 S·cm−1 | No data | Nanofibrous artificial muscles | [109] |
| PVDF with 0.05 wt% and 0.1 wt% BCNW | Thickness of the PVDF membrane: 215 µm; PVDF-BCNW composites: 176 µm and 151 µm, respectively, for 0.05 and 0.1% | Electrospinning of PVDF: Needle inner diameter 0.838 mm; Applied voltage: 12 kV; Distance to collector: 24 cm; Solution flow rate: 1.5 mL/h; Solution concentration: 25 wt% in DMF and acetone (1:1, v/v) | PVDF/BCNW (0.1 wt%) actuator had a fast response and large tip displacement. Young’s modulus and yield strength around 3.5 GPa and around 9.5 MPa, respectively. | No data | Actuators anticipated in the fields of biomimetic robotics, medical devices, various actuators, and sensors | [110] |
| Free-standing Nylon-6/6 PPy-coated microribbons | Widths of the gold-coated electrospun microribbons: 1–1.5 µm; Thickness of the PPy layer: ~80 nm | (1) Electrospinning of Nylon-6/6: Needle inner diameter 0.838 mm; Applied voltage: 25 kV; Distance to collector: 15, 20 cm; Solution flow rate: 0.05–0.10 mL/h; Solution concentration: 22 wt% in formic acid (2) Coating of fibers with Au (3) Electrochemical PPy deposition process | The fabricated actuator responded by curling and straightening when the external stimulus current, pH, and temperature was applied | No data | Soft actuators sensing different external stimuli, bifunctional electrochemical devices | [111,112] |
| Au/Nylon-PDMS - Au covered Nylon-6/6 micrometric fibers attached to a thin PDMS film | Average diameter of the fibers: 2.08 ± 0.1 µm; Total thickness of the device: 250 ± 2.5 µm | (1) Electrospinning of Nylon-6/6: Needle inner diameter 0.838 mm; Applied voltage: 20 kV ± 2 kV; Distance to collector: 15 cm; Solution flow rate: 0.2 mL/h; Solution concentration: 30 wt% in formic acid (2) Coating fibers with Au (3) Assembly of metalized fiber network to the PDMS sheet | Displacement of 0.8 cm when applying 2.2 V (500-cycle test performed) | No data | Artificial muscle | [113] |
| Glucose–gelatin nanofiber scaffolds chemically coated with PPy | PPy covered individual fibers separately, resulting in uniformly coated fibers with a similar diameter of 1.58 ± 0.1 µm in aqueous electrolyte and 1.43 ± 0.12 µm in PC electrolyte | (1) Electrospinning of glucose/gelatin (in 1:10 wt% ratio, dissolved in 10 M acetic acid): Applied voltage: 17.5 kV; Distance to collector: 14.5 cm; Solution flow rate: 5–7 µL/min; (2) Crosslinking the nonwovens at 175 °C (3) Electrochemical PPy deposition process | PPy coated the CFS fibers showing electrochemomechanical activity in both aqueous and organic (PC) electrolyte solutions; In water: conductivity: 0.45 ± 0.034 S·cm−1; reversible strain and stress of 1.2% and 3.15 kPa, respectively. | No data | Wearable devices, such as e-skin or in soft robotics devices | [114] |
| Poly(ether-ester-urethane) (PU): poly [4,4′-methylenebis(phenyl isocyanate)-alt-1,4-butanediol/di(propylene glycol)/polycaprolactone] | Mean diameter: 0.88 ± 0.36 µm; Volume fraction: 0.47 ± 0.08; Bundles were homogeneous (diameters of random bundles 468 ± 33 µm and aligned ones 419 ± 37 µm without the presence of beads) | Electrospinning of PU: Four needles with inner diameter of 0.51 mm; Applied voltage: 23 kV; Distance to collector: 18 cm; Solution flow rate: 0.3 mL/h; Solution concentration: 25 w/v in THF:DMF (70:30, v/v) collector, with a speed of 1500 mm min–1 | A failure force of the random mats: FF = 0.83 ± 0.08 N (εF = 232 ± 17%); Of bundles: FF = 0.50 ± 0.08 N (εF = 182 ± 18%) | No data | Muscle tissue engineering and soft actuators | [115] |
| RM 257 as a liquid crystal mesogen and HDT as a chain extender doped with PDA | The diameters of microfibers ranged from 10 to 100 µm | (1) Electrospinning of ink (RM257, HDT, HHMP): Four needles with inner diameters of 1.194 mm; Applied voltage: 6 kV; Solution flow rate: 0.02 mL/min; Solution concentration: 20 wt% in TCM During the electrospinning process, the LCE microfibers were exposed to UV light (365 nm wavelength) to trigger the crosslinking reaction (2) Preparation of PDA-coated LCE microfibers through a simple dip-coating process | Longitudinal contraction under the exposure of NIR light of PDA-LCE; Actuation strain: >50%; actuation stress: 0.3 MPa; response speed: 300%/s; and work density: 20 kJ/m3 The temperature actuation strains were 55, 33, and 30% at 120 °C when the applied stresses were 0.02, 0.08, and 0.16 MPa, respectively | No data | LCE microfiber actuator for artificial muscles, microrobots, or microfluidic pumps. | [116] |
7. Summary and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Poppinga, S.; Zollfrank, C.; Prucker, O.; Rühe, J.; Menges, A.; Cheng, T.; Speck, T. Toward a New Generation of Smart Biomimetic Actuators for Architecture. Adv. Mater. 2018, 30, e1703653. [Google Scholar] [CrossRef]
- Li, W.; Matsuhisa, N.; Liu, Z.; Wang, M.; Luo, Y.; Cai, P.; Chen, G.; Zhang, F.; Li, C.; Liu, Z.; et al. An on-demand plant-based actuator created using conformable electrodes. Nat. Electron. 2021, 4, 134–142. [Google Scholar] [CrossRef]
- Li, S.; Wang, K.W. Plant-inspired adaptive structures and materials for morphing and actuation: A review. Bioinspir. Biomim. 2017, 12, 011001. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Yang, J.; Zhang, X.; Feng, Y.; Zeng, H.; Wang, L.; Feng, W. Light-driven bimorph soft actuators: Design, fabrication, and properties. Mater. Horiz. 2021, 8, 728–757. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Wu, Y.; Li, C.; Yang, X.; Chen, W. Flexible Actuators for Soft Robotics. Adv. Intell. Syst. 2020, 2, 1900077. [Google Scholar] [CrossRef]
- Xu, Z.; Zhou, Y.; Zhang, B.; Zhang, C.; Wang, J.; Wang, Z. Recent Progress on Plant-Inspired Soft Robotics with Hydrogel Building Blocks: Fabrication, Actuation and Application. Micromachines 2021, 12, 608. [Google Scholar] [CrossRef]
- Mirfakhrai, T.; Madden, J.D.W.; Baughman, R.H. Polymer artificial muscles. Mater. Today 2007, 10, 30–38. [Google Scholar] [CrossRef]
- Wang, W.; Li, C.; Cho, M.; Ahn, S.-H. Soft Tendril-Inspired Grippers: Shape Morphing of Programmable Polymer–Paper Bilayer Composites. ACS Appl. Mater. Interfaces 2018, 10, 10419–10427. [Google Scholar] [CrossRef]
- Osotsi, M.I.; Zhang, W.; Zada, I.; Gu, J.; Liu, Q.; Zhang, D. Butterfly wing architectures inspire sensor and energy applications. Natl. Sci. Rev. 2021, 8, nwaa107. [Google Scholar] [CrossRef]
- Lepora, N.F.; Verschure, P.; Prescott, T.J. The state of the art in biomimetics. Bioinspir. Biomim. 2013, 8, 013001. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, J.; Guo, X.; Yang, S.; Ozen, M.O.; Chen, P.; Liu, X.; Du, W.; Xiao, F.; Demirci, U.; et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat. Commun. 2019, 10, 4087. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Liu, R.; Chen, K.; Liu, Y.; Zhao, Y.; Cui, X.; Tian, Y. Bioinspired gradient structured soft actuators: From fabrication to application. Chem. Eng. J. 2023, 461, 141966. [Google Scholar] [CrossRef]
- Beregoi, M.; Beaumont, S.; Evanghelidis, A.; Otero, T.F.; Enculescu, I. Bioinspired polypyrrole based fibrillary artificial muscle with actuation and intrinsic sensing capabilities. Sci. Rep. 2022, 12, 15019. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Zhao, Q.; Zhang, L.; Du, X. Intelligent Polymer-Based Bioinspired Actuators: From Monofunction to Multifunction. Adv. Intell. Syst. 2020, 2, 2000138. [Google Scholar] [CrossRef]
- Carpi, F.; Kornbluh, R.; Sommer-Larsen, P.; Alici, G. Electroactive polymer actuators as artificial muscles: Are they ready for bioinspired applications? Bioinspir. Biomim. 2011, 6, 045006. [Google Scholar] [CrossRef]
- Marsudi, M.A.; Ariski, R.T.; Wibowo, A.; Cooper, G.; Barlian, A.; Rachmantyo, R.; Bartolo, P.J.D.S. Conductive Polymeric-Based Electroactive Scaffolds for Tissue Engineering Applications: Current Progress and Challenges from Biomaterials and Manufacturing Perspectives. Int. J. Mol. Sci. 2021, 22, 11543. [Google Scholar] [CrossRef]
- Razzaq, M.Y.; Gonzalez-Gutierrez, J.; Mertz, G.; Ruch, D.; Schmidt, D.F.; Westermann, S. 4D Printing of Multicomponent Shape-Memory Polymer Formulations. Appl. Sci. 2022, 12, 7880. [Google Scholar] [CrossRef]
- Gracias, D.H. Stimuli responsive self-folding using thin polymer films. Curr. Opin. Chem. Eng. 2013, 2, 112–119. [Google Scholar] [CrossRef]
- Krause, S.; Dersch, R.; Wendorff, J.H.; Finkelmann, H. Photocrosslinkable Liquid Crystal Main-Chain Polymers: Thin Films and Electrospinning. Macromol. Rapid Commun. 2007, 28, 2062–2068. [Google Scholar] [CrossRef]
- Mu, Q.; Zhang, Q.; Yu, W.; Su, M.; Cai, Z.; Cui, K.; Ye, Y.; Liu, X.; Deng, L.; Chen, B.; et al. Robust Multiscale-Oriented Thermoresponsive Fibrous Hydrogels with Rapid Self-Recovery and Ultrafast Response Underwater. ACS Appl. Mater. Interfaces 2020, 12, 33152–33162. [Google Scholar] [CrossRef]
- Agarwal, S.; Jiang, S.; Chen, Y. Progress in the Field of Water- and/or Temperature-Triggered Polymer Actuators. Macromol. Mater. Eng. 2019, 304, 1800548. [Google Scholar] [CrossRef]
- Lendlein, A.; Kelch, S. Shape-memory polymers. Angew. Chem. Int. Ed. 2002, 41, 2034–2057. [Google Scholar] [CrossRef]
- Mather, P.T.; Luo, X.; Rousseau, I.A. Shape Memory Polymer Research. Annu. Rev. Mater. Res. 2009, 39, 445–471. [Google Scholar] [CrossRef]
- Behl, M.; Razzaq, M.Y.; Lendlein, A. Multifunctional shape-memory polymers. Adv. Mater. 2010, 22, 3388–3410. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Liu, Y.; Leng, J. Progress of shape memory polymers and their composites in aerospace applications. J. Astronaut. 2020, 28, 103003. [Google Scholar] [CrossRef]
- Ebadi, S.V.; Fashandi, H.; Semnani, D.; Rezaei, B.; Fakhrali, A. Electroactive actuator based on polyurethane nanofibers coated with polypyrrole through electrochemical polymerization: A competent method for developing artificial muscles. Smart Mater. Struct. 2020, 29, 045008. [Google Scholar] [CrossRef]
- Hong, C.-H.; Ki, S.-J.; Jeon, J.-H.; Che, H.-L.; Park, I.-K.; Kee, C.-D.; Oh, I.-K. Electroactive bio-composite actuators based on cellulose acetate nanofibers with specially chopped polyaniline nanoparticles through electrospinning. Compos. Sci. Technol. 2013, 87, 135–141. [Google Scholar] [CrossRef]
- Montero De Espinosa, L.; Meesorn, W.; Moatsou, D.; Weder, C. Bioinspired Polymer Systems with Stimuli-Responsive Mechanical Properties. Chem. Rev. 2017, 117, 12851–12892. [Google Scholar] [CrossRef]
- Mazurek-Budzyńska, M.; Razzaq, M.Y.; Tomczyk, K.; Rokicki, G.; Behl, M.; Lendlein, A. Poly(carbonate-urea-urethane) networks exhibiting high-strain shape-memory effect. Polym. Adv. Technol. 2017, 28, 1285–1293. [Google Scholar] [CrossRef]
- Verpaalen, R.C.P.; Engels, T.; Schenning, A.P.H.J.; Debije, M.G. Stimuli-Responsive Shape Changing Commodity Polymer Composites and Bilayers. ACS Appl. Mater. Interfaces 2020, 12, 38829–38844. [Google Scholar] [CrossRef]
- Zhang, Q.M.; Serpe, M.J. Stimuli-Responsive Polymers for Actuation. ChemPhysChem 2017, 18, 1451–1465. [Google Scholar] [CrossRef] [PubMed]
- Guimard, N.K.; Gomez, N.; Schmidt, C.E. Conducting polymers in biomedical engineering. Prog. Polym. Sci. 2007, 32, 876–921. [Google Scholar] [CrossRef]
- Xia, Y.; He, Y.; Zhang, F.; Liu, Y.; Leng, J. A Review of Shape Memory Polymers and Composites: Mechanisms, Materials, and Applications. Adv. Mater. 2021, 33, 2000713. [Google Scholar] [CrossRef] [PubMed]
- Al-Abduljabbar, A.; Farooq, I. Electrospun Polymer Nanofibers: Processing, Properties, and Applications. Polymers 2023, 15, 65. [Google Scholar] [CrossRef] [PubMed]
- Huang, Z.-M.; Zhang, Y.-Z.; Kotaki, M.; Ramakrishna, S. A review on polymer nanofibers by electrospinning and their applications in nanocomposites. Compos. Sci. Technol. 2003, 63, 2223–2253. [Google Scholar] [CrossRef]
- Severt, S.Y.; Maxwell, S.L.; Bontrager, J.S.; Leger, J.M.; Murphy, A.R. Mimicking muscle fiber structure and function through electromechanical actuation of electrospun silk fiber bundles. J. Mater. Chem. B 2017, 5, 8105–8114. [Google Scholar] [CrossRef]
- Laramée, A.W.; Lanthier, C.; Pellerin, C. Electrospinning of Highly Crystalline Polymers for Strongly Oriented Fibers. ACS Appl. Polym. Mater. 2020, 2, 5025–5032. [Google Scholar] [CrossRef]
- Huang, C.; Soenen, S.J.; Rejman, J.; Lucas, B.; Braeckmans, K.; Demeester, J.; De Smedt, S.C. Stimuli-responsive electrospun fibers and their applications. Chem. Soc. Rev. 2011, 40, 2417–2434. [Google Scholar] [CrossRef]
- Gotti, C.; Sensini, A.; Zucchelli, A.; Carloni, R.; Focarete, M.L. Hierarchical fibrous structures for muscle-inspired soft-actuators: A review. Appl. Mater. Today 2020, 20, 100772. [Google Scholar] [CrossRef]
- Kim, I.H.; Choi, S.; Lee, J.; Jung, J.; Yeo, J.; Kim, J.T.; Ryu, S.; Ahn, S.-K.; Kang, J.; Poulin, P.; et al. Human-muscle-inspired single fibre actuator with reversible percolation. Nat. Nanotechnol. 2022, 17, 1198–1205. [Google Scholar] [CrossRef]
- Tynan, L.; Naik, G.; Gargiulo, G.D.; Gunawardana, U. Implementation of the Biological Muscle Mechanism in HASEL Actuators to Leverage Electrohydraulic Principles and Create New Geometries. Actuators 2021, 10, 38. [Google Scholar] [CrossRef]
- Sharabi, M. Structural Mechanisms in Soft Fibrous Tissues: A Review. Front. Mater. 2022, 8, 793647. [Google Scholar] [CrossRef]
- Abrams, M.J.; Basinger, T.; Yuan, W.; Guo, C.-L.; Goentoro, L. Self-repairing symmetry in jellyfish through mechanically driven reorganization. Proc. Natl. Acad. Sci. USA 2015, 112, E3365–E3373. [Google Scholar] [CrossRef] [PubMed]
- Scorza, L.C.T.; Dornelas, M.C. Plants on the move: Towards common mechanisms governing mechanically-induced plant movements. Plant Signal. Behav. 2011, 6, 1979–1986. [Google Scholar] [CrossRef]
- Liscum, E.; Askinosie, S.K.; Leuchtman, D.L.; Morrow, J.; Willenburg, K.T.; Coats, D.R. Phototropism: Growing towards an Understanding of Plant Movement. Plant Cell 2014, 26, 38–55. [Google Scholar] [CrossRef] [PubMed]
- Volkov, A.G.; Pinnock, M.-R.; Lowe, D.C.; Gay, M.S.; Markin, V.S. Complete hunting cycle of Dionaea muscipula: Consecutive steps and their electrical properties. J. Plant Physiol. 2011, 168, 109–120. [Google Scholar] [CrossRef] [PubMed]
- Monshausen, G.B.; Swanson, S.J.; Gilroy, S. Touch Sensing and Thigmotropism. In Plant Tropisms; Wiley: Hoboken, NJ, USA, 2007; pp. 91–122. [Google Scholar] [CrossRef]
- Farhan, M.; Klimm, F.; Thielen, M.; Rešetič, A.; Bastola, A.; Behl, M.; Speck, T.; Lendlein, A. Artificial Tendrils Mimicking Plant Movements by Mismatching Modulus and Strain in Core and Shell. Adv. Mater. 2023, 35, e2211902. [Google Scholar] [CrossRef]
- Li, J.; Tian, A.; Sun, Y.; Feng, B.; Wang, H.; Zhang, X. The Development of a Venus Flytrap Inspired Soft Robot Driven by IPMC. J. Bionic Eng. 2023, 20, 406–415. [Google Scholar] [CrossRef]
- Scherzer, S.; Federle, W.; Al-Rasheid, K.A.S.; Hedrich, R. Venus flytrap trigger hairs are micronewton mechano-sensors that can detect small insect prey. Nat. Plants 2019, 5, 670–675. [Google Scholar] [CrossRef]
- Kareklas, K.; Nettle, D.; Smulders, T.V. Water-induced finger wrinkles improve handling of wet objects. Biol. Lett. 2013, 9, 20120999. [Google Scholar] [CrossRef]
- Song, K.; Yeom, E.; Seo, S.-J.; Kim, K.; Kim, H.; Lim, J.-H.; Lee, S.J. Journey of water in pine cones. Sci. Rep. 2015, 5, srep09963. [Google Scholar] [CrossRef] [PubMed]
- Reyssat, E.; Mahadevan, L. Hygromorphs: From pine cones to biomimetic bilayers. J. R. Soc. Interface 2009, 6, 951–957. [Google Scholar] [CrossRef] [PubMed]
- Chuang, Y.-C.; Chang, Y.-C.; Tsai, M.-T.; Yang, T.-W.; Huang, M.-T.; Wu, S.-H.; Wang, C. Electrospinning of Aqueous Solutions of Atactic Poly(N-isopropylacrylamide) with Physical Gelation. Gels 2022, 8, 716. [Google Scholar] [CrossRef]
- Schoolaert, E.; Ryckx, P.; Geltmeyer, J.; Maji, S.; Van Steenberge, P.H.M.; D’hooge, D.R.; Hoogenboom, R.; De Clerck, K. Waterborne Electrospinning of Poly(N-isopropylacrylamide) by Control of Environmental Parameters. ACS Appl. Mater. Interfaces 2017, 9, 24100–24110. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Lee, M.; Lee, J. Highly sensitive humidity-responsive actuator comprising aligned electrospun fibers containing metal–organic framework nanoparticles. Sens. Actuators B Chem. 2021, 332, 129520. [Google Scholar] [CrossRef]
- Jiang, S.; Liu, F.; Lerch, A.; Ionov, L.; Agarwal, S. Unusual and Superfast Temperature-Triggered Actuators. Adv. Mater. 2015, 27, 4865–4870. [Google Scholar] [CrossRef]
- Xu, Y.; Ajji, A.; Heuzey, M.-C. Tunable two-step shape and dimensional changes with temperature of a PNIPAM/CNC hydrogel. Soft Matter 2022, 18, 4437–4444. [Google Scholar] [CrossRef]
- Liu, L.; Jiang, S.; Sun, Y.; Agarwal, S. Giving Direction to Motion and Surface with Ultra-Fast Speed Using Oriented Hydrogel Fibers. Adv. Funct. Mater. 2016, 26, 1021–1027. [Google Scholar] [CrossRef]
- Chen, T.; Bakhshi, H.; Liu, L.; Ji, J.; Agarwal, S. Combining 3D Printing with Electrospinning for Rapid Response and Enhanced Designability of Hydrogel Actuators. Adv. Funct. Mater. 2018, 28, 1800514. [Google Scholar] [CrossRef]
- Shang, J.; Le, X.; Zhang, J.; Chen, T.; Theato, P. Trends in polymeric shape memory hydrogels and hydrogel actuators. Polym. Chem. 2019, 10, 1036–1055. [Google Scholar] [CrossRef]
- Löwenberg, C.; Balk, M.; Wischke, C.; Behl, M.; Lendlein, A. Shape-Memory Hydrogels: Evolution of Structural Principles to Enable Shape Switching of Hydrophilic Polymer Networks. Acc. Chem. Res. 2017, 50, 723–732. [Google Scholar] [CrossRef] [PubMed]
- Gu, X.; Mather, P.T. Water-triggered shape memory of multiblock thermoplastic polyurethanes (TPUs). RSC Adv. 2013, 3, 15783–15791. [Google Scholar] [CrossRef]
- Ang, J.Y.; Chan, B.Q.Y.; Kai, D.; Loh, X.J. Engineering Porous Water-Responsive Poly(PEG/PCL/PDMS Urethane) Shape Memory Polymers. Macromol. Mater. Eng. 2017, 302, 1700174. [Google Scholar] [CrossRef]
- Wei, X.; Xue, Y.; Sun, Y.; Chen, L.; Zhang, C.; Wu, Q.; Peng, S.; Ma, C.; Liu, Z.; Jiang, S.; et al. A robust anisotropic light-responsive hydrogel for ultrafast and complex biomimetic actuation via poly(pyrrole)-coated electrospun nanofiber. Chem. Eng. J. 2023, 452, 139373. [Google Scholar] [CrossRef]
- Miranda, D.O.; Dorneles, M.F.; Oréfice, R.L. One-step process for the preparation of fast-response soft actuators based on electrospun hybrid hydrogel nanofibers obtained by reactive electrospinning with in situ synthesis of conjugated polymers. Polymer 2020, 200, 122590. [Google Scholar] [CrossRef]
- Wei, X.; Chen, L.; Wang, Y.; Sun, Y.; Ma, C.; Yang, X.; Jiang, S.; Duan, G. An Electrospinning Anisotropic Hydrogel with Remotely-Controlled Photo-Responsive Deformation and Long-Range Navigation for Synergist Actuation. Chem. Eng. J. 2022, 433, 134258. [Google Scholar] [CrossRef]
- Liu, L.; Bakhshi, H.; Jiang, S.; Schmalz, H.; Agarwal, S. Composite Polymeric Membranes with Directionally Embedded Fibers for Controlled Dual Actuation. Macromol. Rapid Commun. 2018, 39, e1800082. [Google Scholar] [CrossRef]
- Cho, K.; Kang, D.; Lee, H.; Koh, W.-G. Multi-stimuli responsive and reversible soft actuator engineered by layered fibrous matrix and hydrogel micropatterns. Chem. Eng. J. 2021, 427, 130879. [Google Scholar] [CrossRef]
- Liu, W.; He, Y.; Leng, J. Humidity-Responsive Shape Memory Polyurea with a High Energy Output Based on Reversible Cross-Linked Networks. ACS Appl. Mater. Interfaces 2023, 15, 2163–2171. [Google Scholar] [CrossRef]
- Ren, L.; Li, B.; Song, Z.; Liu, Q.; Ren, L.; Zhou, X. Bioinspired fiber-regulated composite with tunable permanent shape and shape memory properties via 3d magnetic printing. Compos. Part B Eng. 2019, 164, 458–466. [Google Scholar] [CrossRef]
- Salaris, V.; Leonés, A.; Lopez, D.; Kenny, J.M.; Peponi, L. Shape-Memory Materials via Electrospinning: A Review. Polymers 2022, 14, 995. [Google Scholar] [CrossRef] [PubMed]
- Lendlein, A.; Kelch, S.; Kratz, K.; Schulte, J.; Schauer, S. Shape-Memory Polymers. In Reference Module in Materials Science and Materials Engineering; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Zare, M.; Davoodi, P.; Ramakrishna, S. Electrospun Shape Memory Polymer Micro-/Nanofibers and Tailoring Their Roles for Biomedical Applications. Nanomaterials 2021, 11, 933. [Google Scholar] [CrossRef] [PubMed]
- Xia, Y.; Zhang, F.; Wang, L.; Liu, Y.; Leng, J. Electrospun shape-memory polymer fibers and their applications. In Electrospun Polymers and Composites—Ultrafine Materials, High Performance Fibres and Wearables; Dong, Y., Baji, A., Ramakrishna, S., Eds.; Woodhead Publishing Series in Composites Science and Engineering; Woodhead Publishing: Sawston, UK, 2021; pp. 567–596. [Google Scholar]
- Zhang, Q.; Rudolph, T.; Benitez, A.J.; Gould, O.E.C.; Behl, M.; Kratz, K.; Lendlein, A. Temperature-controlled reversible pore size change of electrospun fibrous shape-memory polymer actuator based meshes. Smart Mater. Struct. 2019, 28, 055037. [Google Scholar] [CrossRef]
- Sauter, T.; Kratz, K.; Farhan, M.; Heuchel, M.; Lendlein, A. Design and fabrication of fiber mesh actuators. Appl. Mater. Today 2022, 29, 101562. [Google Scholar] [CrossRef]
- Izraylit, V.; Heuchel, M.; Kratz, K.; Lendlein, A. Non-woven shape-memory polymer blend actuators. MRS Adv. 2021, 6, 781–785. [Google Scholar] [CrossRef]
- Banitaba, S.N.; Ebadi, S.V.; Salimi, P.; Bagheri, A.; Gupta, A.; Arifeen, W.U.; Chaudhary, V.; Mishra, Y.K.; Kaushik, A.; Mostafavi, E. Biopolymer-based electrospun fibers in electrochemical devices: Versatile platform for energy, environment, and health monitoring. Mater. Horiz. 2022, 9, 2914–2948. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Xu, W.; Ding, Y.; Agarwal, S.; Greiner, A.; Duan, G. A review of smart electrospun fibers toward textiles. Compos. Commun. 2020, 22, 100506. [Google Scholar] [CrossRef]
- Wang, X.-X.; Yu, G.-F.; Zhang, J.; Yu, M.; Ramakrishna, S.; Long, Y.-Z. Conductive polymer ultrafine fibers via electrospinning: Preparation, physical properties and applications. Prog. Mater. Sci. 2021, 115, 100704. [Google Scholar] [CrossRef]
- Kosidlo, U.; Omastová, M.; Micusik, M.; Ćirić-Marjanović, G.; Randriamahazaka, H.; Wallmersperger, T.; Aabloo, A.; Kolaric, I.; Bauernhansl, T. Nanocarbon based ionic actuators—A review. Smart Mater. Struct. 2013, 22, 104022. [Google Scholar] [CrossRef]
- García-Gallegos, J.C.; Martín-Gullón, I.; Conesa, J.A.; Vega-Cantú, Y.I.; Rodríguez-Macías, F.J. The effect of carbon nanofillers on the performance of electromechanical polyaniline-based composite actuators. Nanotechnology 2016, 27, 15501. [Google Scholar] [CrossRef]
- Bar-Cohen, Y.; Anderson, I.A. Electroactive polymer (EAP) actuators—Background review. Mech. Soft Mater. 2019, 1, 5. [Google Scholar] [CrossRef]
- Deng, Q.; Jia, H.; An, C.; Wu, S.; Zhao, S.; Hu, N. Progress and prospective of electrochemical actuator materials. Compos. Part A Appl. Sci. Manuf. 2023, 165, 107336. [Google Scholar] [CrossRef]
- Martins, P.; Correia, D.M.; Correia, V.; Lanceros-Mendez, S. Polymer-based actuators: Back to the future. Phys. Chem. Chem. Phys. 2020, 22, 15163–15182. [Google Scholar] [CrossRef] [PubMed]
- Serrano-Garcia, W.; Bonadies, I.; Thomas, S.W.; Guarino, V. New Insights to Design Electrospun Fibers with Tunable Electrical Conductive–Semiconductive Properties. Sensors 2023, 23, 1606. [Google Scholar] [CrossRef] [PubMed]
- Zong, H.; Xia, X.; Liang, Y.; Dai, S.; Alsaedi, A.; Hayat, T.; Kong, F.; Pan, J.H. Designing function-oriented artificial nanomaterials and membranes via electrospinning and electrospraying techniques. Mater. Sci. Eng. C 2018, 92, 1075–1091. [Google Scholar] [CrossRef] [PubMed]
- Blachowicz, T.; Ehrmann, A. Conductive Electrospun Nanofiber Mats. Materials 2019, 13, 152. [Google Scholar] [CrossRef]
- Bittencourt, J.C.; Gois, B.H.d.S.; de Oliveira, V.J.R.; Agostini, D.L.d.S.; Olivati, C.d.A. Gas sensor for ammonia detection based on poly(vinyl alcohol) and polyaniline electrospun. J. Appl. Polym. Sci. 2019, 136, 47288. [Google Scholar] [CrossRef]
- Zhang, J.; Qiu, K.; Sun, B.; Fang, J.; Zhang, K.; Ei-Hamshary, H.; Al-Deyab, S.S.; Mo, X. The aligned core–sheath nanofibers with electrical conductivity for neural tissue engineering. J. Mater. Chem. B 2014, 2, 7945–7954. [Google Scholar] [CrossRef]
- Bhang, S.H.; Jeong, S.I.; Lee, T.-J.; Jun, I.; Bin Lee, Y.; Kim, B.-S.; Shin, H. Electroactive Electrospun Polyaniline/Poly[(L-lactide)-co-(ε-caprolactone)] Fibers for Control of Neural Cell Function. Macromol. Biosci. 2012, 12, 402–411. [Google Scholar] [CrossRef]
- Chen, C.; Chen, X.; Zhang, H.; Zhang, Q.; Wang, L.; Li, C.; Dai, B.; Yang, J.; Liu, J.; Sun, D. Electrically-responsive core-shell hybrid microfibers for controlled drug release and cell culture. Acta Biomater. 2017, 55, 434–442. [Google Scholar] [CrossRef]
- Laforgue, A.; Robitaille, L. Production of Conductive PEDOT Nanofibers by the Combination of Electrospinning and Vapor-Phase Polymerization. Macromolecules 2010, 43, 4194–4200. [Google Scholar] [CrossRef]
- Ismail, Y.A.; Shin, M.K.; Kim, S.J. A nanofibrous hydrogel templated electrochemical actuator: From single mat to a rolled-up structure. Sens. Actuators B Chem. 2009, 136, 438–443. [Google Scholar] [CrossRef]
- Kwon, J.K.; Yoo, H.J.; Cho, J.W. Conducting core-sheath polyurethane-PEDOT nanofibres for conducting polymer actuator. Int. J. Nanotechnol. 2013, 10, 661. [Google Scholar] [CrossRef]
- Li, J.; Vadahanambi, S.; Kee, C.-D.; Oh, I.-K. Electrospun Fullerenol-Cellulose Biocompatible Actuators. Biomacromolecules 2011, 12, 2048–2054. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Guo, Y.; Wei, Y.; MacDiarmid, A.G.; Lelkes, P.I. Electrospinning polyaniline-contained gelatin nanofibers for tissue engineering applications. Biomaterials 2006, 27, 2705–2715. [Google Scholar] [CrossRef]
- Kiristi, M.; Oksuz, A.U.; Oksuz, L.; Ulusoy, S. Electrospun chitosan/PEDOT nanofibers. Mater. Sci. Eng. C 2013, 33, 3845–3850. [Google Scholar] [CrossRef]
- Aznar-Cervantes, S.; Roca, M.I.; Martinez, J.G.; Meseguer-Olmo, L.; Cenis, J.L.; Moraleda, J.M.; Otero, T.F. Fabrication of conductive electrospun silk fibroin scaffolds by coating with polypyrrole for biomedical applications. Bioelectrochemistry 2012, 85, 36–43. [Google Scholar] [CrossRef]
- Lv, Y.; Ma, X.; Xu, Y.; Shu, H.; Jia, W. Effect of carboxymethyl cellulose on the output force and electrochemical performance of sodium alginate ion electric actuator. Sens. Actuators A Phys. 2022, 339, 113269. [Google Scholar] [CrossRef]
- Ebadi, S.V.; Semnani, D.; Fashandi, H.; Rezaei, B.; Fakhrali, A. Gaining insight into electrolyte solution effects on the electrochemomechanical behavior of electroactive PU/PPy nanofibers: Introducing a high-performance artificial muscle. Sens. Actuators B Chem. 2020, 305, 127519. [Google Scholar] [CrossRef]
- Ebadi, S.V.; Semnani, D.; Fashandi, H.; Rezaei, B. Synthesis and characterization of a novel polyurethane/polypyrrole-p-toluenesulfonate (PU/PPy-pTS) electroactive nanofibrous bending actuator. Polym. Adv. Technol. 2019, 30, 2261–2274. [Google Scholar] [CrossRef]
- Mottaghitalab, V.; Xi, B.; Spinks, G.M.; Wallace, G.G. Polyaniline fibres containing single walled carbon nanotubes: Enhanced performance artificial muscles. Synth. Met. 2006, 156, 796–803. [Google Scholar] [CrossRef]
- Nezakati, T.; Seifalian, A.; Tan, A.; Seifalian, A.M. Conductive Polymers: Opportunities and Challenges in Biomedical Applications. Chem. Rev. 2018, 118, 6766–6843. [Google Scholar] [CrossRef]
- Otero, T.F.; Martinez, J.G.; Arias-Pardilla, J. Biomimetic electrochemistry from conducting polymers. A review: Artificial muscles, smart membranes, smart drug delivery and computer/neuron interfaces. Electrochim. Acta 2012, 84, 112–128. [Google Scholar] [CrossRef]
- Beregoi, M.; Busuioc, C.; Evanghelidis, A.; Matei, E.; Iordache, F.; Radu, M.; Dinischiotu, A.; Enculescu, I. Electrochromic properties of polyaniline-coated fiber webs for tissue engineering applications. Int. J. Pharm. 2016, 510, 465–473. [Google Scholar] [CrossRef]
- Beregoi, M.; Evanghelidis, A.; Matei, E.; Enculescu, I. Polyaniline based microtubes as building-blocks for artificial muscle applications. Sens. Actuators B Chem. 2017, 253, 576–583. [Google Scholar] [CrossRef]
- Gu, B.K.; Ismail, Y.A.; Spinks, G.M.; Kim, S.I.; So, I.; Kim, S.J. A Linear Actuation of Polymeric Nanofibrous Bundle for Artificial Muscles. Chem. Mater. 2009, 21, 511–515. [Google Scholar] [CrossRef]
- Kim, S.-S.; Kee, C.-D. Electro-active polymer actuator based on PVDF with bacterial cellulose nano-whiskers (BCNW) via electrospinning method. Int. J. Precis. Eng. Manuf. 2014, 15, 315–321. [Google Scholar] [CrossRef]
- Beregoi, M.; Beaumont, S.; Jinga, S.I.; Otero, T.F.; Enculescu, I. Chemical sensing and actuation properties of polypyrrole coated fibers. Smart Mater. Struct. 2022, 31, 105012. [Google Scholar] [CrossRef]
- Beregoi, M.; Evanghelidis, A.; Diculescu, V.C.; Iovu, H.; Enculescu, I. Polypyrrole Actuator Based on Electrospun Microribbons. ACS Appl. Mater. Interfaces 2017, 9, 38068–38075. [Google Scholar] [CrossRef]
- Bunea, M.-C.; Beregoi, M.; Evanghelidis, A.; Galatanu, A.; Enculescu, I. Direct and remote induced actuation in artificial muscles based on electrospun fiber networks. Sci. Rep. 2022, 12, 13084. [Google Scholar] [CrossRef]
- Harjo, M.; Zondaka, Z.; Leemets, K.; Järvekülg, M.; Tamm, T.; Kiefer, R. Polypyrrole-coated fiber-scaffolds: Concurrent linear actuation and sensing. J. Appl. Polym. Sci. 2020, 137, 48533. [Google Scholar] [CrossRef]
- Gotti, C.; Sensini, A.; Fornaia, G.; Gualandi, C.; Zucchelli, A.; Focarete, M.L. Biomimetic Hierarchically Arranged Nanofibrous Structures Resembling the Architecture and the Passive Mechanical Properties of Skeletal Muscles: A Step Forward Toward Artificial Muscle. Front. Bioeng. Biotechnol. 2020, 8, 767. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Wang, Z.; Wang, Y.; Wang, Z.; Li, C.; Annapooranan, R.; Zeng, J.; Chen, R.; Cai, S. Electrospun liquid crystal elastomer microfiber actuator. Sci. Robot. 2021, 6, eabi9704. [Google Scholar] [CrossRef]
- Wang, W.; Li, Z.; Xu, X.; Dong, B.; Zhang, H.; Wang, Z.; Wang, C.; Baughman, R.H.; Fang, S. Au-Doped Polyacrylonitrile-Polyaniline Core-Shell Electrospun Nanofibers Having High Field-Effect Mobilities. Small 2011, 7, 597–600. [Google Scholar] [CrossRef]
- Jin, L.; Zheng, Y.; Liu, Z.; Li, J.; Zhai, H.; Chen, Z.; Li, Y. Design of an Ultrasensitive Flexible Bend Sensor Using a Silver-Doped Oriented Poly(vinylidene fluoride) Nanofiber Web for Respiratory Monitoring. ACS Appl. Mater. Interfaces 2020, 12, 1359–1367. [Google Scholar] [CrossRef]
- Lee, S.; Franklin, S.; Hassani, F.A.; Yokota, T.; Nayeem, O.G.; Wang, Y.; Leib, R.; Cheng, G.; Franklin, D.W.; Someya, T. Nanomesh pressure sensor for monitoring finger manipulation without sensory interference. Science 2020, 370, 966–970. [Google Scholar] [CrossRef]
- Wan, X.; Zhao, Y.; Li, Z.; Li, L. Emerging polymeric electrospun fibers: From structural diversity to application in flexible bioelectronics and tissue engineering. Exploration 2022, 2, 20210029. [Google Scholar] [CrossRef]
- Florczak, S.; Lorson, T.; Zheng, T.; Mrlik, M.; Hutmacher, D.W.; Higgins, M.J.; Luxenhofer, R.; Dalton, P.D. Melt electrowriting of electroactive poly(vinylidene difluoride) fibers. Polym. Int. 2019, 68, 735–745. [Google Scholar] [CrossRef]
- Brown, T.D.; Dalton, P.D.; Hutmacher, D.W. Melt electrospinning today: An opportune time for an emerging polymer process. Prog. Polym. Sci. 2016, 56, 116–166. [Google Scholar] [CrossRef]
- El-Sayed, H.; Vineis, C.; Varesano, A.; Mowafi, S.; Carletto, R.A.; Tonetti, C.; Taleb, M.A. A critique on multi-jet electrospinning: State of the art and future outlook. Nanotechnol. Rev. 2019, 8, 236–245. [Google Scholar] [CrossRef]
- Lee, J.; Moon, S.; Lahann, J.; Lee, K.J. Recent Progress in Preparing Nonwoven Nanofibers via Needleless Electrospinning. Macromol. Mater. Eng. 2023, 308, 2300057. [Google Scholar] [CrossRef]





| Stimulus | Materials and Solvents | Morphology | Electrospinning Conditions | Actuation Capability (ε’rev) | Applications | Ref. |
|---|---|---|---|---|---|---|
| Heat | PCL crosslinked using UVcrosslinker (TAIC and BP); Solvents: chloroform and ethanol (7:3 volume ratio) | Fiber dimeter: before crosslinking (2.3 ± 0.6 µm) and after crosslinking (2.2 ± 0.7 µm) | Voltage: 20 kV; distance: 30 cm; rotational speed of collector: 1 rpm | 6 ± 1% at εm = 100%; 22 ± 1% at εm = 300% | Smart membrane materials for textiles and filtration | [76] |
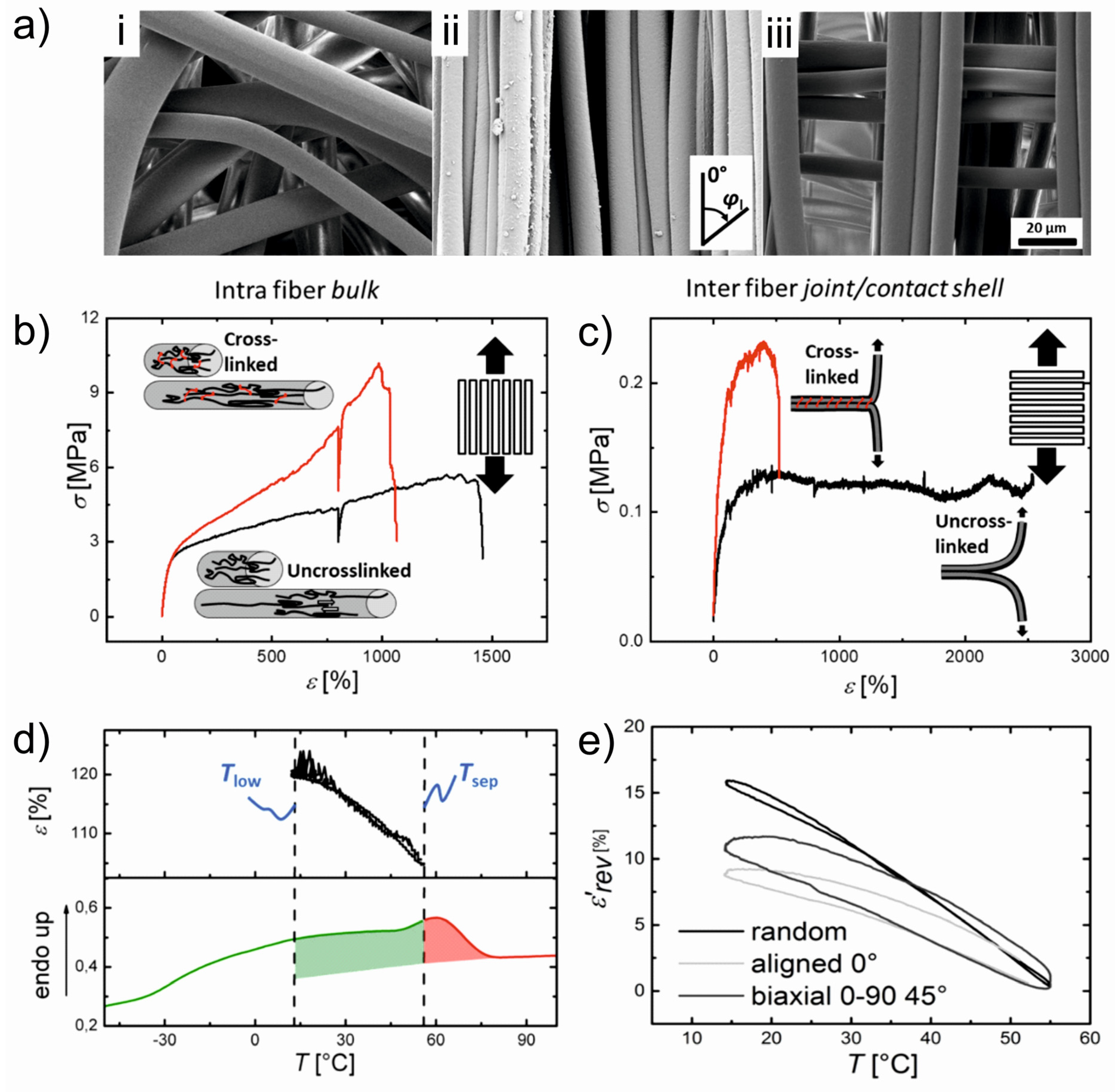
| Heat | PEVA crosslinked using UV crosslinker (TAIC and BP); Solvent: chloroform | Fiber diameter: 15.2 ± 2 µm for random and 9 ± 2 µm for aligned fibers; Mesh thickness: ~100 µm | Voltage: 8 kV; feed rate: 2.4 mL/h; distance: 10 cm; rotational speed of collector: variable 1–180 rpm | 17 ± 2% (random); 12 ± 2% (stacked); 10 ± 1% (aligned) | Soft robots, tissue regeneration | [77] |
| Heat | Multi-block copolymer containing PLLA and PCL segments (PLLA-PCL) blended with ODLA; Solvent: tetrahydrofuran (THF) | Fiber diameter: 1.8 ± 0.6 µm; Mesh thickness: 50 ± 2 µm | Voltage: 10–13 kV; feed rate: 2.1 mL/h; distance: 10 cm; rotational speed of collector: 10 rpm | 7.8 ± 0.8% for electrospun mesh; 15 ± 0.8% for twisted yarn | Soft robotics, medicines | [78] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Razzaq, M.Y.; Balk, M.; Mazurek-Budzyńska, M.; Schadewald, A. From Nature to Technology: Exploring Bioinspired Polymer Actuators via Electrospinning. Polymers 2023, 15, 4029. https://doi.org/10.3390/polym15194029
Razzaq MY, Balk M, Mazurek-Budzyńska M, Schadewald A. From Nature to Technology: Exploring Bioinspired Polymer Actuators via Electrospinning. Polymers. 2023; 15(19):4029. https://doi.org/10.3390/polym15194029
Chicago/Turabian StyleRazzaq, Muhammad Yasar, Maria Balk, Magdalena Mazurek-Budzyńska, and Anke Schadewald. 2023. "From Nature to Technology: Exploring Bioinspired Polymer Actuators via Electrospinning" Polymers 15, no. 19: 4029. https://doi.org/10.3390/polym15194029
APA StyleRazzaq, M. Y., Balk, M., Mazurek-Budzyńska, M., & Schadewald, A. (2023). From Nature to Technology: Exploring Bioinspired Polymer Actuators via Electrospinning. Polymers, 15(19), 4029. https://doi.org/10.3390/polym15194029