
Single-Bubble Rising in Shear-Thinning and Elastoviscoplastic Fluids Using a Geometric Volume of Fluid Algorithm



Abstract
:
1. Introduction
2. Governing Equations
3. Numerical Method
- Start by computing the raw volume fraction values for each cell in the computational domain using the VOF method.
- Use the raw volume fraction data to generate an initial estimate of the interface position and orientation using a simple threshold operation. Cells with volume fraction values above a certain threshold (e.g., 0.5) are labeled as Fluid A, while cells with volume fraction values below the threshold are labeled as Fluid B.
- Generate an initial estimate of the distance function from the interface [44]. This distance function is used to define an initial estimate of the interface normal and curvature at each cell.
- Use the initial estimate of the distance function to calculate an RDF that better estimates the local interface position and orientation. Here, the gradient of the RDF is defined as the difference between the interface normal estimated from the distance function and the normal estimated from the initial threshold operation.
- Update the interface position and orientation at each cell using the RDF, and repeat the previous step until the RDF converges to a desired tolerance.
- Use the updated interface position and orientation to generate a new estimate of the distance function and repeat the previous steps until a desired level of accuracy is achieved.
- Finally, use the updated interface position and orientation to calculate the interface curvature and normal at each cell, which can be used in subsequent calculations, such as interface advection or pressure-velocity coupling.
| Algorithm1 Multiphase viscoelastic PLIC-RDF isoAdvector (MVP-RIA) algorithm |
| Require: Mesh, physical properties, boundary conditions, initial conditions Ensure: Velocity, pressure, viscoelastic stress tensor and interface geometry fields 1: Initialize fields 2: Set time step, , or Courant number, 3: Start time loop and set end time for simulation 4: Set the number of outer correctors, , and pressure correctors, 5: Set current iteration count and pressure correctors count 6: while not converged or (PIMPLE corrector loop) do 7: Compute face fluxes 8: Update interface geometry using PLIC-RDF isoAdvector algorithm 9: Compute viscoelastic stress tensor (Equations (4) or (5)) 10: Compute linear momentum equation (Equation (2)) 11: while (PISO corrector loop) do 12: Solve the pressure equation and momentum corrector 13: Increment iteration count m 14: end while 15: Increment iteration count n 16: end while 17: Output results |
4. Validation Case Studies
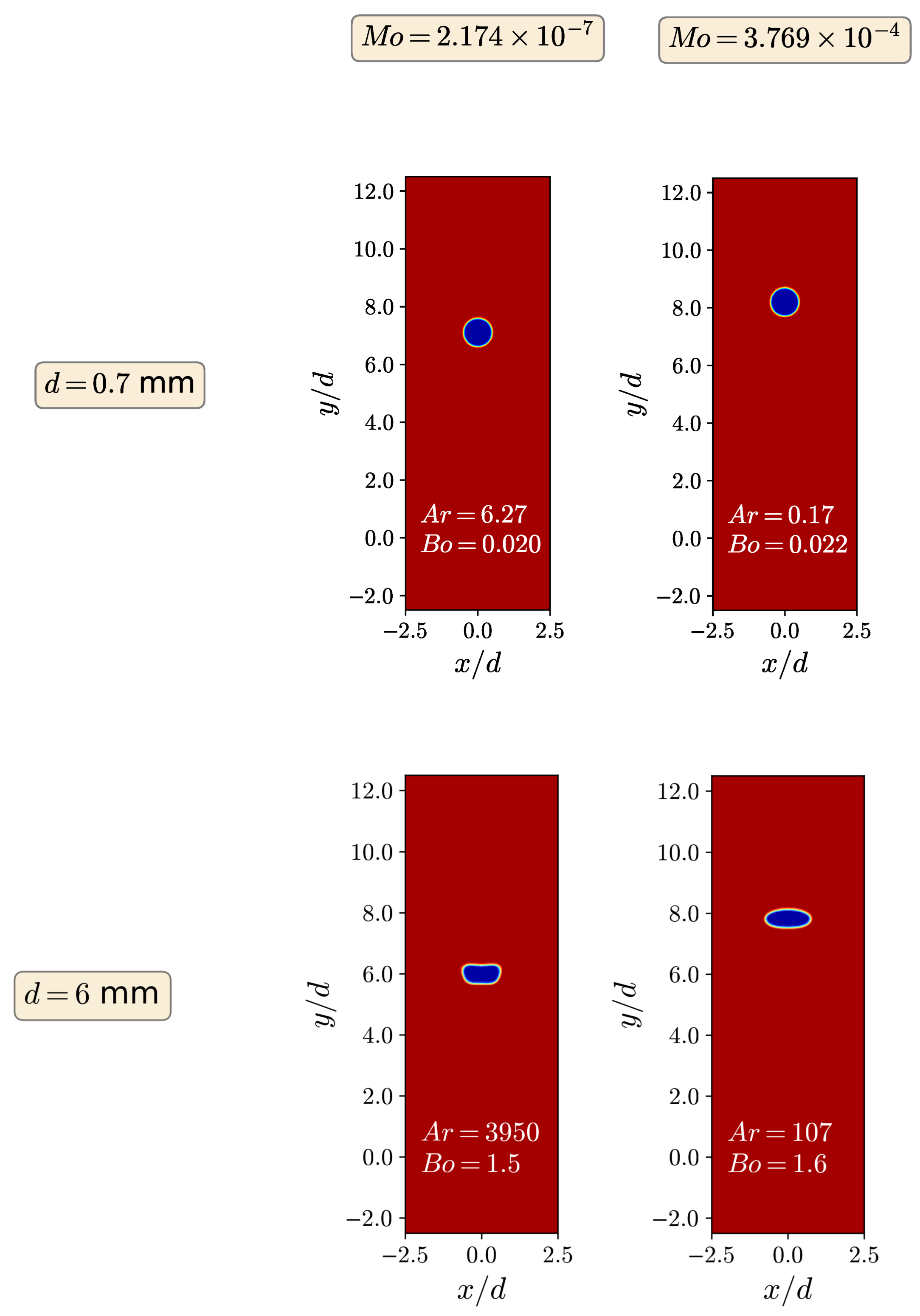
4.1. Buoyancy-Driven Rise of a Bubble in a Newtonian Fluid
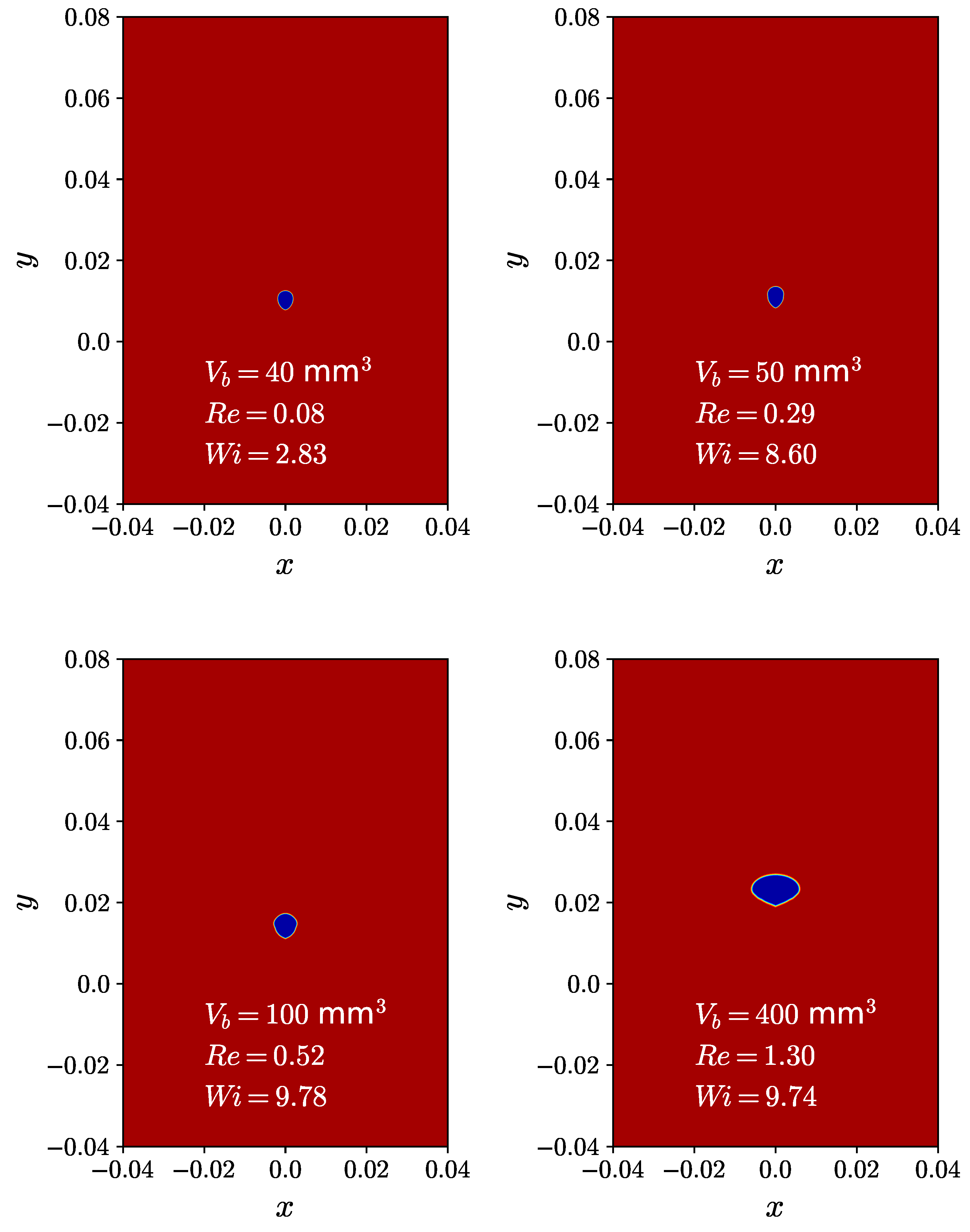
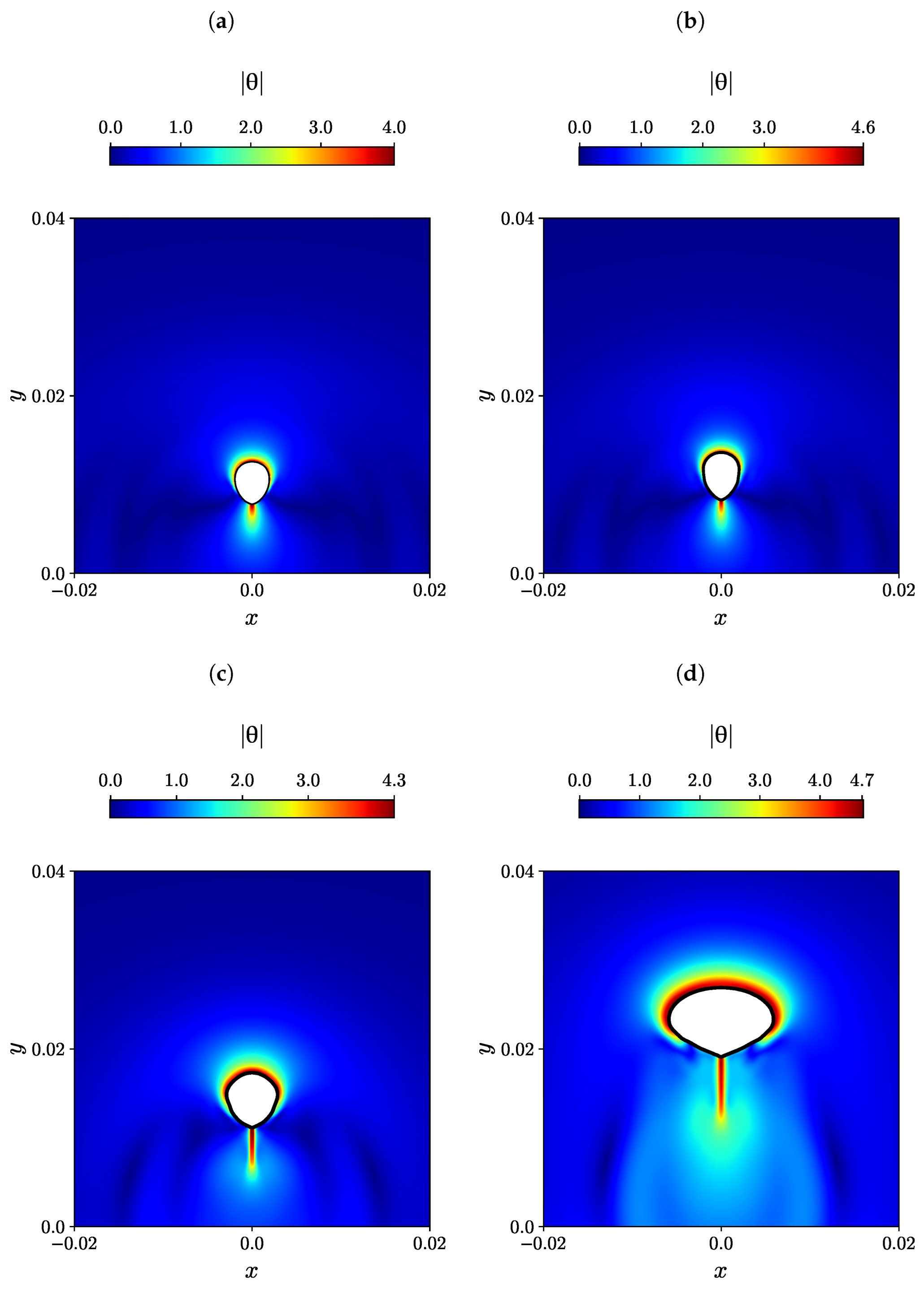
4.2. Buoyancy-Driven Rise of a Bubble through a Viscoelastic Shear-Thinning Fluid
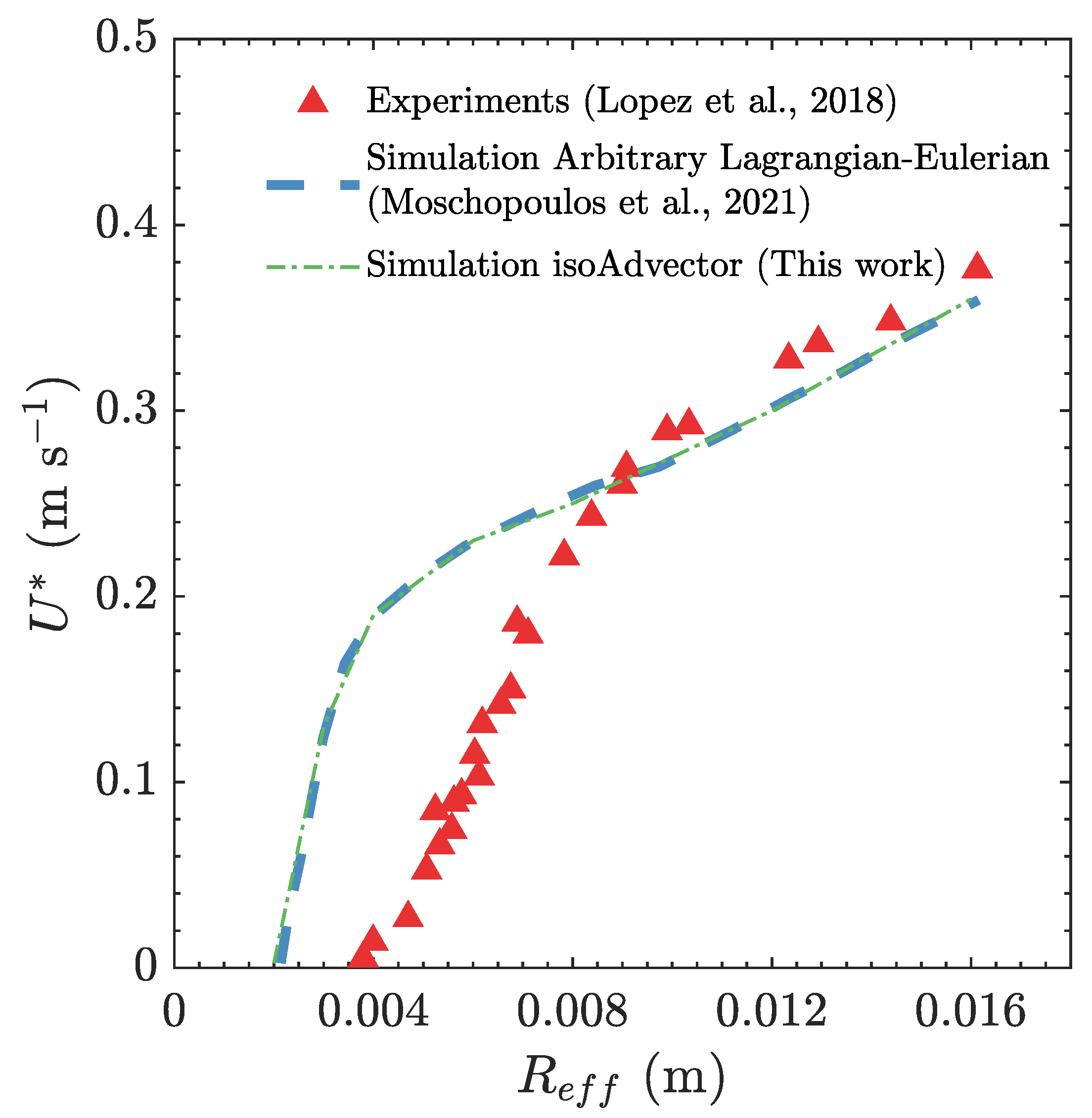
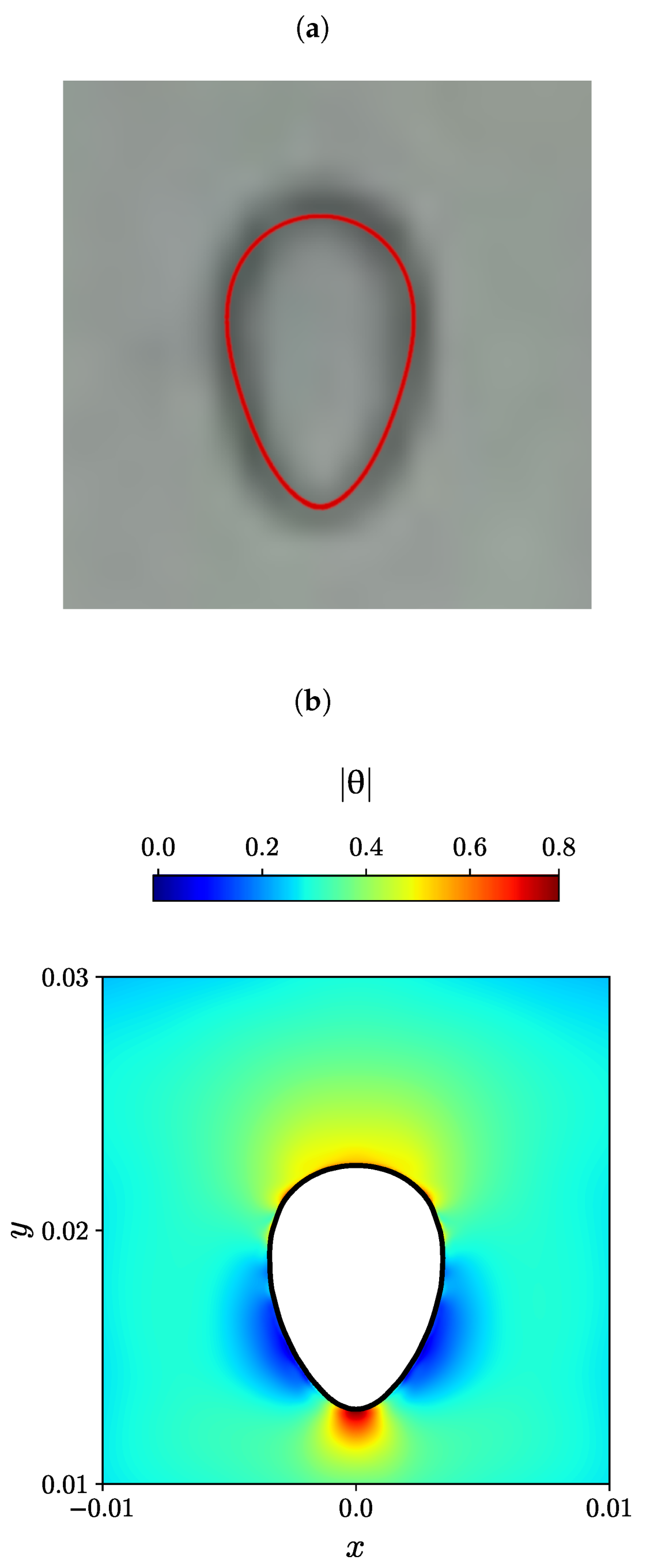
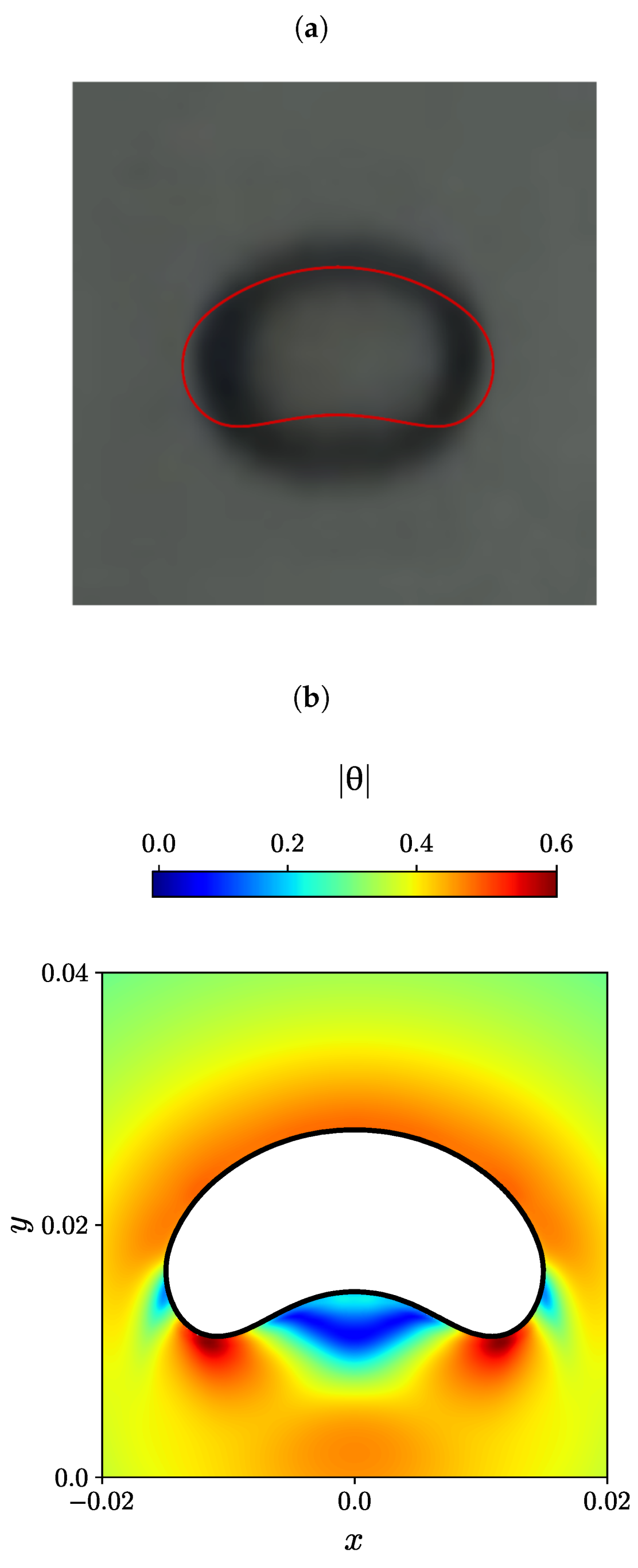
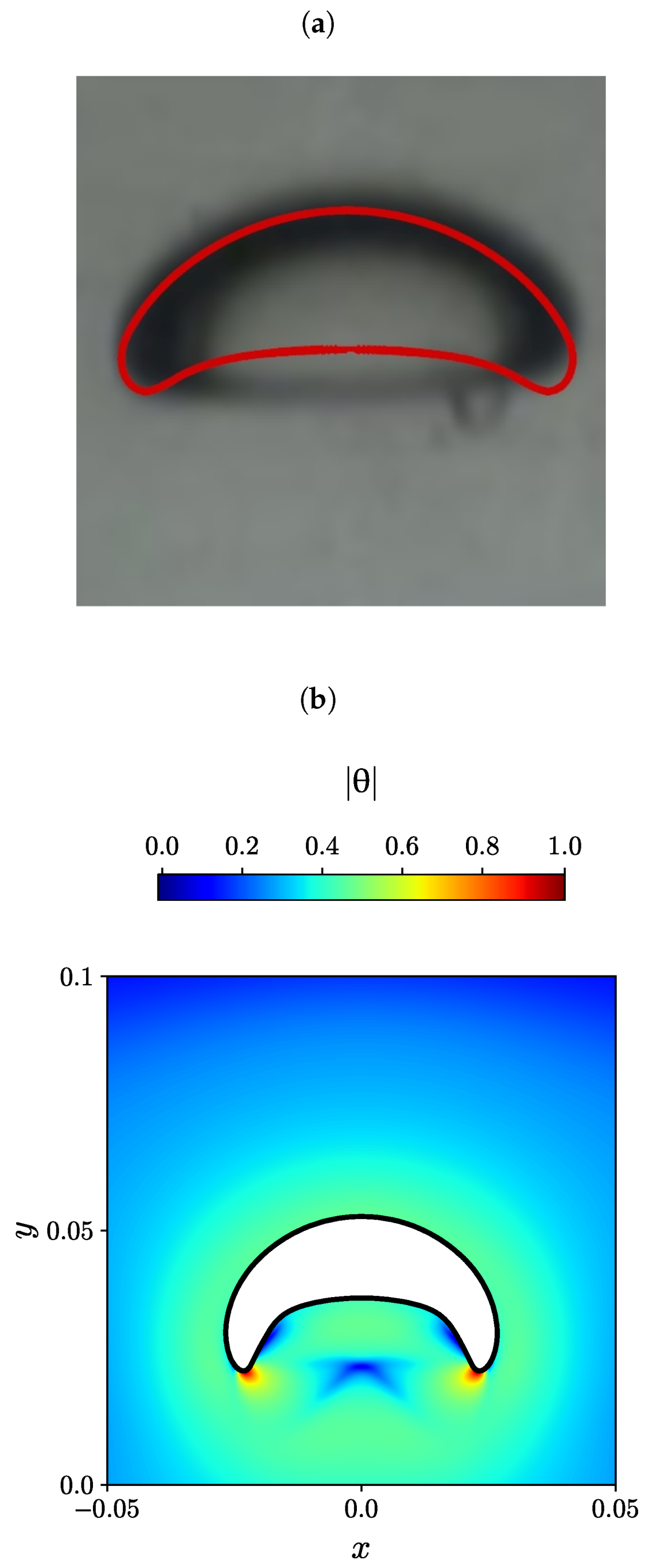
4.3. Buoyancy-Driven Rise of a Bubble through an Elastoviscoplastic Fluid
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADI | Alternating-Direction Implicit |
| ALE | Arbitrary Lagrangian Eulerian |
| BiCGStab | Bi-Conjugate Gradient-Stable Algorithm |
| CSF | Continuum Surface Force |
| CUBISTA | Convergent and Universally Bounded Interpolation Scheme |
| for the Treatment of Advection | |
| FTM | Front-Tracking Method |
| GAMG | Geometric-Algebraic Multi-Grid |
| IBM | Immersed Boundary Method |
| IFEM | Immersed-Finite-Element Method |
| ILU | Incomplete Lower-Upper |
| LSM | Level-Set Method |
| MAC | Marker-And-Cell |
| MULES | Multidimensional Universal Limiter with Explicit Solution |
| MVP-RIA | Multiphase Viscoelastic PLIC-RDF isoAdvector |
| OpenFOAM | Open Source Field Operation and Manipulation |
| PFM | Phase Field Method |
| PIMPLE | Mixture of PISO and SIMPLE |
| PISO | Pressure Implicit with Splitting of Operator |
| PLIC | Piecewise Linear Interface Construction |
| RDF | Reconstructed Distance Function |
| SIMPLE | Semi-Implicit Method for Pressure Linked Equations |
| VOF | Volume-Of-Fluid |
| Nomenclature | |
| Physical and mathematical quantities | |
| u | Velocity vector |
| Density | |
| p | Pressure |
| g | Gravity acceleration |
| Surface tension force | |
| Stress tensor | |
| Newtonian (Solvent) stress tensor | |
| Polymeric extra-stress tensor | |
| Solvent dynamic viscosity | |
| Polymeric dynamic viscosity | |
| Mobility parameter | |
| Relaxation factor, relaxation time | |
| Extensibility parameter | |
| Deviatoric part of stress tensor | |
| Second invariant of the deviatoric stress tensor | |
| Identity tensor | |
| Yield stress | |
| Gordon-Schowalter derivative | |
| Non-affine deformation parameter | |
| Upper-convective time derivative of the polymeric extra-stress tensor | |
| Conformation tensor | |
| Volume fraction | |
| u | Relative velocity vector of two fluids |
| Surface tension coefficient | |
| Calculated rise velocity | |
| Natural logarithm of the conformation tensor | |
| k | Consistency index |
| n | Shear-thinning exponent |
| G | Elastic modulus of the material |
| Geometrical parameters | |
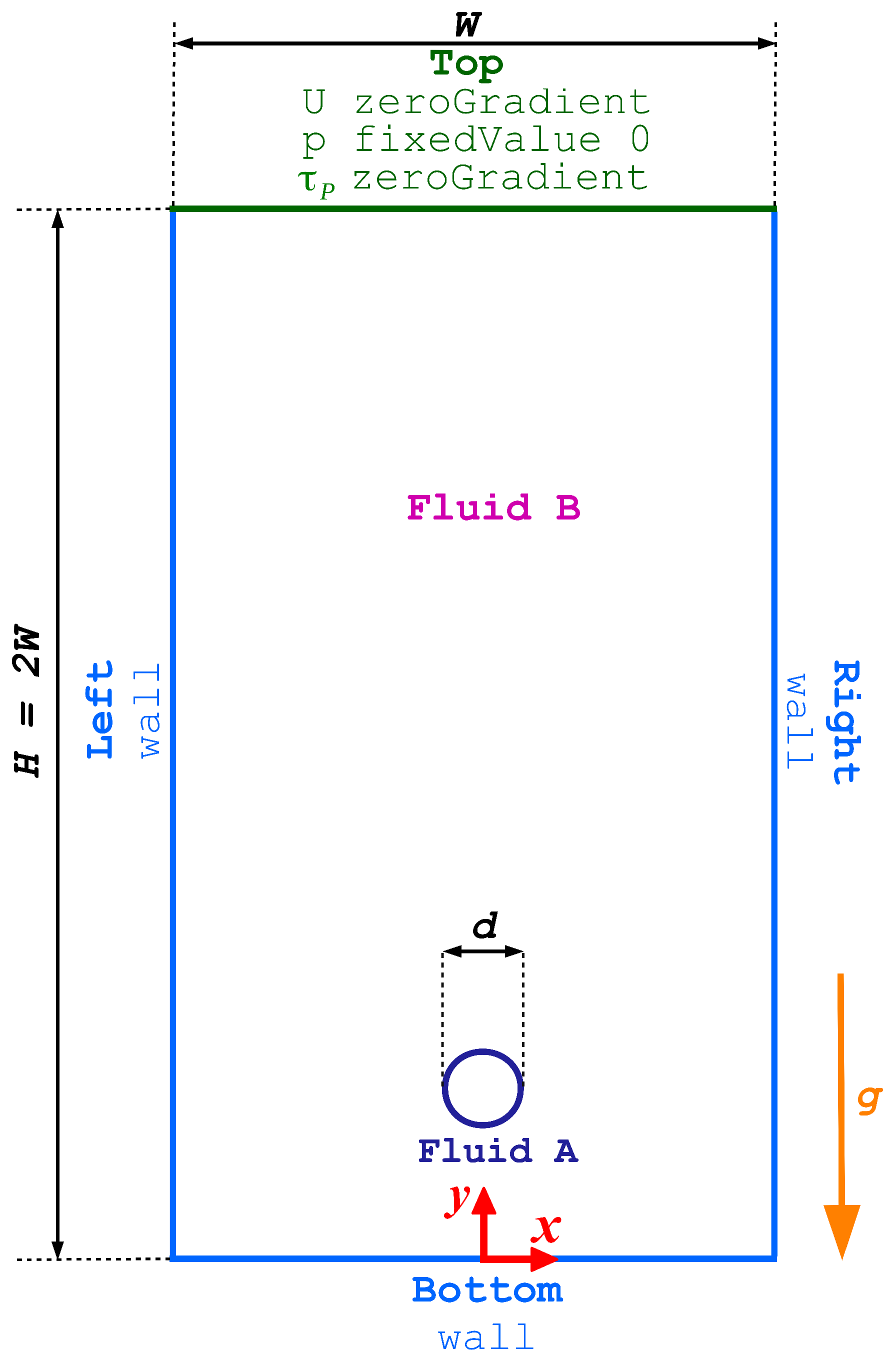
| W | Domain width |
| H | Domain height |
| d | Initial bubble diameter |
| R | Initial bubble radius |
| Initial bubble volume | |
| Effective bubble radii | |
| Non-dimensional numbers | |
| Archimedes number | |
| Bond (Eötvös) number | |
| Morton number | |
| Reynolds number | |
| Weissenberg number | |
| Bingham number | |
| Elastogravity number | |
| Operators | |
| ∇ | Gradient |
| Divergence | |
| Total time derivative | |
| Trace operator | |
| Maximum operator | |
| Transpose operator | |
| : | Double dot product |
References
- Wörner, M. Numerical modeling of multiphase flows in microfluidics and micro process engineering: A review of methods and applications. Microfluid. Nanofluidics 2012, 12, 841–886. [Google Scholar] [CrossRef]
- Carciofi, B.A.M.; Prat, M.; Laurindo, J.B. Dynamics of vacuum impregnation of apples: Experimental data and simulation results using a VOF model. J. Food Eng. 2012, 113, 337–343. [Google Scholar] [CrossRef]
- Štěpánek, F.; Rajniak, P.; Mancinelli, C.; Chern, R.T.; Ramachandran, R. Distribution and accessibility of binder in wet granules. Powder Technol. 2009, 189, 376–384. [Google Scholar] [CrossRef]
- Haroun, Y.; Legendre, D.; Raynal, L. Volume of fluid method for interfacial reactive mass transfer: Application to stable liquid film. Chem. Eng. Sci. 2010, 65, 2896–2909. [Google Scholar] [CrossRef]
- Pineda, H.; Biazussi, J.; López, F.; Oliveira, B.; Carvalho, R.D.M.; Bannwart, A.C.; Ratkovich, N. Phase distribution analysis in an Electrical Submersible Pump (ESP) inlet handling water–air two-phase flow using Computational Fluid Dynamics (CFD). J. Petrol. Sci. Eng. 2016, 139, 49–61. [Google Scholar] [CrossRef]
- Maxworthy, T.; Gnann, C.; Kürten, M.; Durst, F. Experiments on the rise of air bubbles in clean viscous liquids. J. Fluid Mech. 1996, 321, 421–441. [Google Scholar] [CrossRef]
- Tsamopoulos, J.; Dimakopoulos, Y.; Chatzidai, N.; Karapetsas, G.; Pavlidis, M. Steady bubble rise and deformation in Newtonian and viscoplastic fluids and conditions for bubble entrapment. J. Fluid Mech. 2008, 601, 123–164. [Google Scholar] [CrossRef]
- Yan, X.; Jia, Y.; Wang, L.; Cao, Y. Drag coefficient fluctuation prediction of a single bubble rising in water. Chem. Eng. J. 2017, 316, 553–562. [Google Scholar] [CrossRef]
- Ji, J.; Li, S.; Wan, P.; Liu, Z. Numerical simulation of the behaviors of single bubble in shear-thinning viscoelastic fluids. Phys. Fluids 2023, 35, 013313. [Google Scholar] [CrossRef]
- Wang, W. Review of Single Bubble Motion Characteristics Rising in Viscoelastic Liquids. Int. J. Chem. Eng. 2021, 2021, 1712432. [Google Scholar] [CrossRef]
- Zenit, R.; Feng, J.J. Hydrodynamic interactions among bubbles, drops, and particles in non-Newtonian liquids. Annu. Rev. Fluid Mech. 2018, 50, 505–534. [Google Scholar] [CrossRef]
- Langevin, D. Motion of small bubbles and drops in viscoelastic fluids. Curr. Opin. Colloid Interface Sci. 2022, 57, 101529. [Google Scholar] [CrossRef]
- Tomé, M.F.; Mangiavacchi, N.; Cuminato, J.A.; Castelo, A.; McKee, S. A finite difference technique for simulating unsteady viscoelastic free surface flows. J. Non–Newton. Fluid Mech. 2002, 106, 61–106. [Google Scholar] [CrossRef]
- França, H.L.; Oishi, C.M.; Thompson, R.L. Numerical investigation of shear-thinning and viscoelastic binary droplet collision. J. Non–Newton. Fluid Mech. 2022, 302, 104750. [Google Scholar] [CrossRef]
- Saadat, A.; Guido, C.J.; Iaccarino, G.; Shaqfeh, E.S.G. Immersed-finite-element method for deformable particle suspensions in viscous and viscoelastic media. Phys. Rev. E 2018, 98, 063316. [Google Scholar] [CrossRef]
- Fernandes, C.; Faroughi, S.A.; Carneiro, O.S.; Nóbrega, J.M.; McKinley, G.H. Fully-resolved simulations of particle-laden viscoelastic fluids using an immersed boundary method. J. Non–Newton. Fluid Mech. 2019, 266, 80–94. [Google Scholar] [CrossRef]
- Zografos, K.; Afonso, A.M.; Poole, R.J.; Oliveira, M.S.N. A viscoelastic two-phase solver using a phase-field approach. J. Non–Newton. Fluid Mech. 2020, 284, 104364. [Google Scholar] [CrossRef]
- Chun, S.; Ji, B.; Yang, Z.; Malik, V.K.; Feng, J. Experimental observation of a confined bubble moving in shear-thinning fluids. J. Fluid Mech. 2022, 953, A12. [Google Scholar] [CrossRef]
- Astarita, G.; Apuzzo, G. Motion of gas bubbles in non-Newtonian liquids. AIChE J. 1965, 11, 815–820. [Google Scholar] [CrossRef]
- Doherty, W.; Phillips, T.N.; Xie, Z. A stabilized finite element framework for viscoelastic multiphase flows using a conservative level-set method. J. Comput. Phys. 2023, 477, 111936. [Google Scholar] [CrossRef]
- Unverdi, S.O.; Tryggvason, G. A front-tracking method for viscous, incompressible, multi-fluid flows. J. Comput. Phys. 1992, 100, 25–37. [Google Scholar] [CrossRef]
- Sarkar, K.; Schowalter, W.R. Deformation of a two-dimensional viscoelastic drop at non-zero Reynolds number in time-periodic extensional flows. J. Non–Newton. Fluid Mech. 2000, 95, 315–342. [Google Scholar] [CrossRef]
- Xia, H.; Lu, J.; Dabiri, S.; Tryggvason, G. Fully resolved numerical simulations of fused deposition modeling. Part I: Fluid flow. Rapid Prototyp. J. 2018, 24, 463–476. [Google Scholar] [CrossRef]
- Xia, H.; Lu, J.; Tryggvason, G. Simulations of fused filament fabrication using a front tracking method. Int. J. Heat Mass Transf. 2019, 138, 1310–1319. [Google Scholar] [CrossRef]
- Harlaw, F.H.; Welch, J.E. Numerical calculation of time-dependent viscous incompressible flow of fluid with free surface. Phys. Fluids 1965, 8, 2182–2189. [Google Scholar] [CrossRef]
- Fernandes, C.; Fakhari, A.; Tukovic, Ž. Non-isothermal free-surface viscous flow of polymer melts in pipe extrusion using an open-source interface tracking finite volume method. Polymers 2021, 13, 4454. [Google Scholar] [CrossRef] [PubMed]
- Sussman, M.; Smereka, P. Axisymmetric free boundary problems. J. Fluid Mech. 1997, 341, 269–294. [Google Scholar] [CrossRef]
- McKee, S.; Tomé, M.F.; Ferreira, V.G.; Cuminato, J.A.; Castelo, A.; Sousa, F.S.; Mangiavacchi, N. The MAC method. Comput. Fluids 2008, 37, 907–930. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Fakhari, A.; Fernandes, C.; Galindo-Rosales, F.J. Mapping the volume transfer of graphene-based inks with the gravure printing process: Influence of rheology and printing parameters. Materials 2022, 15, 2580. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Yu, J.D.; Sakai, S.; Sethian, J.A. Two-phase viscoelastic jetting. J. Comput. Phys. 2007, 220, 568–585. [Google Scholar] [CrossRef]
- Pillapakkam, S.B.; Singh, P.; Blackmore, D.; Aubry, N. Transient and steady state of a rising bubble in a viscoelastic fluid. J. Fluid Mech. 2007, 589, 215–252. [Google Scholar] [CrossRef]
- Li, Q.; Fangcao, Q. A level set based immersed boundary method for simulation of non-isothermal viscoelastic melt filling process. Chin. J. Chem. Eng. 2021, 32, 119–133. [Google Scholar] [CrossRef]
- Peskin, C.S. Flow patterns around heart valves: A numerical method. J. Comput. Phys. 1972, 10, 252–271. [Google Scholar] [CrossRef]
- Huang, W.X.; Tian, F.B. Recent trends and progress in the immersed boundary method. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 7617–7636. [Google Scholar] [CrossRef]
- Biben, T. Phase-field models for free-boundary problems. Eur. J. Phys. 2005, 26, S47. [Google Scholar] [CrossRef]
- Langer, J.S. Models of pattern formation in first-order phase transitions. In Directions in Condensed Matter Physics; Grinstein, G., Mazenko, G., Eds.; World Scientific: Singapore, 1986; Volume 1, pp. 165–186. [Google Scholar] [CrossRef]
- Chen, L.Q.; Zhao, Y. From classical thermodynamics to phase-field method. Prog. Mater. Sci. 2022, 124, 100868. [Google Scholar] [CrossRef]
- Li, M.; Matouš, K.; Nerenberg, R. Predicting biofilm deformation with a viscoelastic phase-field model: Modeling and experimental studies. Biotechnol. Bioeng. 2020, 117, 3486–3498. [Google Scholar] [CrossRef]
- Dammaß, F.; Ambati, M.; Kästner, M. A unified phase-field model of fracture in viscoelastic materials. Continuum Mech. Thermodyn. 2021, 33, 1907–1929. [Google Scholar] [CrossRef]
- Roenby, J.; Bredmose, H.; Jasak, H. A computational method for sharp interface advection. R. Soc. Open Sci. 2016, 3, 160405. [Google Scholar] [CrossRef] [PubMed]
- OpenCFD Ltd. OpenFOAM—The Open Source CFD Toolbox—User’s Guide; OpenCFD Ltd.: Salfords, UK, 2021; Available online: https://www.openfoam.com/ (accessed on 16 August 2023).
- Scheufler, H.; Roenby, J. Accurate and efficient surface reconstruction from volume fraction data on general meshes. J. Comp. Phys. 2019, 383, 1–23. [Google Scholar] [CrossRef]
- Nguyen, V.T.; Phan, T.H.; Duy, T.N.; Kim, D.H.; Park, W.G. Modeling of the bubble collapse with water jets and pressure loads using a geometrical volume of fluid based simulation method. Int. J. Multiph. Flow 2022, 152, 104103. [Google Scholar] [CrossRef]
- So, K.K.; Hu, X.Y.; Adams, N.A. Anti-diffusion interface sharpening technique for two-phase compressible flow simulations. J. Comput. Phys. 2012, 231, 4304–4323. [Google Scholar] [CrossRef]
- Heyns, J.A.; Malan, A.G.; Harms, T.M.; Oxtoby, O.F. Development of a compressive surface capturing formulation for modelling free-surface flow by using the volume-of-fluid approach. Int. J. Numer. Methods Fluids 2012, 71, 788–804. [Google Scholar] [CrossRef]
- Sun, D.L.; Tao, W.Q. A coupled volume-of-fluid and level set (VOSET) method for computing incompressible two-phase flows. Int. J. Heat Mass Transf. 2010, 53, 645–655. [Google Scholar] [CrossRef]
- Ling, K.; Li, Z.H.; Sun, D.L.; He, Y.L.; Tao, W.Q. A three-dimensional volume of fluid & level set (VOSET) method for incompressible two-phase flow. Comput. Fluids 2015, 118, 293–304. [Google Scholar] [CrossRef]
- Cao, Z.; Sun, D.; Wei, J.; Yu, B. A coupled volume-of-fluid and level set method based on multi-dimensional advection for unstructured triangular meshes. Chem. Eng. Sci. 2018, 176, 560–579. [Google Scholar] [CrossRef]
- Giesekus, H. A simple constitutive equation for polymer fluids based on the concept of deformation-dependent tensorial mobility. J. Non–Newton. Fluid Mech. 1982, 11, 69–109. [Google Scholar] [CrossRef]
- Saramito, P. A new elastoviscoplastic model based on the Herschel-Bulkley viscoplastic model. J. Non–Newton. Fluid Mech. 2009, 158, 154–161. [Google Scholar] [CrossRef]
- Habla, F.; Tan, M.W.; Haßlberger, J.; Hinrichsen, O. Numerical simulation of the viscoelastic flow in a three-dimensional lid-driven cavity using the log-conformation reformulation in OpenFOAM. J. Non–Newton. Fluid Mech. 2014, 212, 47–62. [Google Scholar] [CrossRef]
- Pimenta, F.; Alves, M.A. Stabilization of an open-source finite-volume solver for viscoelastic fluid flows. J. Non–Newton. Fluid Mech. 2017, 239, 85–104. [Google Scholar] [CrossRef]
- Fattal, R.; Kupferman, R. Constitutive laws for the matrix-logarithm of the conformation tensor. J. Non–Newton. Fluid Mech. 2004, 123, 281–285. [Google Scholar] [CrossRef]
- rheoTool.Toolbox to Simulate GNF and Viscoelastic Fluid Flows in OpenFOAM. 2017. Available online: https://github.com/fppimenta/rheoTool (accessed on 16 August 2023).
- Weller, H.G. A New Approach to VOF-Based Interface Capturing Methods for Incompressible and Compressible Flow; Technical Report TR/HGW/04; OpenCFD Ltd.: Salfords, UK, 2008. [Google Scholar]
- Deshpande, S.S.; Anumolu, L.; Trujillo, M.F. Evaluating the performance of the two-phase flow solver interFoam. Comput. Sci. Discov. 2013, 5, 014016. [Google Scholar] [CrossRef]
- Weller, H.G.; Tabor, G.; Jasak, H.; Fureby, C. A tensorial approach to computational continuum mechanics using object-orientated techniques. Comput. Phys. IEEE Comp. Sci. Eng. 1998, 12, 620–631. [Google Scholar] [CrossRef]
- Fakhari, A.; Galindo-Rosales, F.J. Parametric analysis of the transient back extrusion flow to determine instantaneous viscosity. Phys. Fluids 2021, 33, 033602. [Google Scholar] [CrossRef]
- Vukčević, V.; Jasak, H.; Gatin, I. Implementation of the Ghost Fluid Method for free surface flows in polyhedral Finite Volume framework. Comput. Fluids 2017, 153, 1–19. [Google Scholar] [CrossRef]
- Gamet, L.; Scala, M.; Roenby, J.; Scheufler, H.; Pierson, J.L. Validation of volume-of-fluid OpenFOAM isoAdvector solvers using single bubble benchmarks. Comput. Fluids 2020, 213, 104722. [Google Scholar] [CrossRef]
- Andersson, P. Tutorial multiphaseInterFoam for the damBreak4phase Case; Technical Report; Solid and Fluid Mechanics; Chalmers University of Technology: Gothenburg, Sweeden, 2010. [Google Scholar]
- OpenFOAMWiki. Available online: https://openfoamwiki.net/index.php/InterFoam#cite_note-2 (accessed on 26 December 2020).
- Cummins, S.J.; Francois, M.M.; Kothe, D.B. Estimating curvature from volume fractions. Comput. Struct. 2005, 83, 425–434. [Google Scholar] [CrossRef]
- Van Doormaal, J.P.; Raithby, G.D. Enhancements of the SIMPLE method for predicting incompressible fluid flows. Numer. Heat Transf. 1984, 7, 147–163. [Google Scholar] [CrossRef]
- Issa, R.I. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Tuković, Ž.; Perić, M.; Jasak, H. Consistent second-order time-accurate non-iterative PISO-algorithm. Comput. Fluids 2018, 166, 78–85. [Google Scholar] [CrossRef]
- Rhie, C.M.; Chow, W.L. Numerical study of the turbulent flow past an airfoil with trailing edge separation. AIAA J. 1983, 21, 1525–1532. [Google Scholar] [CrossRef]
- Alves, M.A.; Oliveira, P.J.; Pinho, F.T. A convergent and universally bounded interpolation scheme for the treatment of advection. Int. J. Numer. Methods Fluids 2003, 41, 47–75. [Google Scholar] [CrossRef]
- Wesseling, P.; Oosterlee, C.W. Geometric multigrid with applications to computational fluid dynamics. J. Comput. Appl. Math. 2001, 128, 311–334. [Google Scholar] [CrossRef]
- Jacobs, D.A.H. Preconditioned Conjugate Gradient Methods for Solving Systems of Algebraic Equations; Technical Report RD/L/N193/80; Central Electricity Research Laboratories: Leatherhead, UK, 1980. [Google Scholar]
- Lee, J.; Zhang, J.; Lu, C.C. Incomplete LU preconditioning for large scale dense complex linear systems from electromagnetic wave scattering problems. J. Comp. Phys. 2003, 185, 158–175. [Google Scholar] [CrossRef]
- Pilz, C.; Brenn, G. On the critical bubble volume at the rise velocity jump discontinuity in viscoelastic liquids. J. Non–Newton. Fluid Mech. 2007, 145, 124–138. [Google Scholar] [CrossRef]
- Bhaga, D.; Weber, M.E. Bubbles in viscous liquids: Shapes, wakes and velocities. J. Fluid Mech. 1981, 105, 61–85. [Google Scholar] [CrossRef]
- Gaudlitz, D.; Adams, N.A. Numerical investigation of rising bubble wake and shape variations. Phys. Fluids 2009, 21, 122102. [Google Scholar] [CrossRef]
- Niethammer, M.; Brenn, G.; Marschall, H.; Bothe, D. An extended volume of fluid method and its application to single bubbles rising in a viscoelastic liquid. J. Comput. Phys. 2019, 387, 326–355. [Google Scholar] [CrossRef]
- Yuan, W.; Zhang, M.; Khoo, B.C.; Phan-Thien, N. Dynamics and deformation of a three-dimensional bubble rising in viscoelastic fluids. J. Non–Newton. Fluid Mech. 2020, 285, 104408. [Google Scholar] [CrossRef]
- Moschopoulos, P.; Spyridakis, A.; Varchanis, S.; Dimakopoulos, Y.; Tsamopoulos, J. The concept of elasto-visco-plasticity and its application to a bubble rising in yield stress fluids. J. Non Newton. Fluid Mech. 2021, 297, 104670. [Google Scholar] [CrossRef]
- Lopez, W.F.; Naccache, M.F.; de Souza Mendes, P.R. Rising bubbles in yield stress materials. J. Rheol. 2018, 62, 209–219. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluid | Dynamic Viscosity | Density | Surface Tension | Morton Number |
|---|---|---|---|---|
| (Ns/m) | (kg/m) | (N/m) | ||
| B-1 | 1153.8 | 0.06782 | ||
| B-2 | 1208.5 | 0.06550 | ||
| A | 1 |
| Fluid | Solvent Viscosity | Polymer Viscosity | Density | Surface Tension | Relaxation Time | Mobility Factor |
|---|---|---|---|---|---|---|
| (Ns/m) | (Ns/m) | (kg/m) | (N/m) | (s) | ||
| B | 1000.90 | 0.076 | 0.207 | 0.6 | ||
| A | 1.25 |
| [m] | ||||
|---|---|---|---|---|
| 0.004 | 3.610 | 0.119 | 2.150 | 0.971 |
| 0.0083 | 8.929 | 0.057 | 9.347 | 2.024 |
| 0.0107 | 12.090 | 0.044 | 15.385 | 2.597 |
| 0.0163 | 20.410 | 0.029 | 35.704 | 3.956 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fakhari, A.; Fernandes, C. Single-Bubble Rising in Shear-Thinning and Elastoviscoplastic Fluids Using a Geometric Volume of Fluid Algorithm. Polymers 2023, 15, 3437. https://doi.org/10.3390/polym15163437
Fakhari A, Fernandes C. Single-Bubble Rising in Shear-Thinning and Elastoviscoplastic Fluids Using a Geometric Volume of Fluid Algorithm. Polymers. 2023; 15(16):3437. https://doi.org/10.3390/polym15163437
Chicago/Turabian StyleFakhari, Ahmad, and Célio Fernandes. 2023. "Single-Bubble Rising in Shear-Thinning and Elastoviscoplastic Fluids Using a Geometric Volume of Fluid Algorithm" Polymers 15, no. 16: 3437. https://doi.org/10.3390/polym15163437
APA StyleFakhari, A., & Fernandes, C. (2023). Single-Bubble Rising in Shear-Thinning and Elastoviscoplastic Fluids Using a Geometric Volume of Fluid Algorithm. Polymers, 15(16), 3437. https://doi.org/10.3390/polym15163437