

Application of High-Photoelasticity Polyurethane to Tactile Sensor for Robot Hands
 ,
,
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
1.1. History
1.2. Purpose of This Study
2. Experimental Section
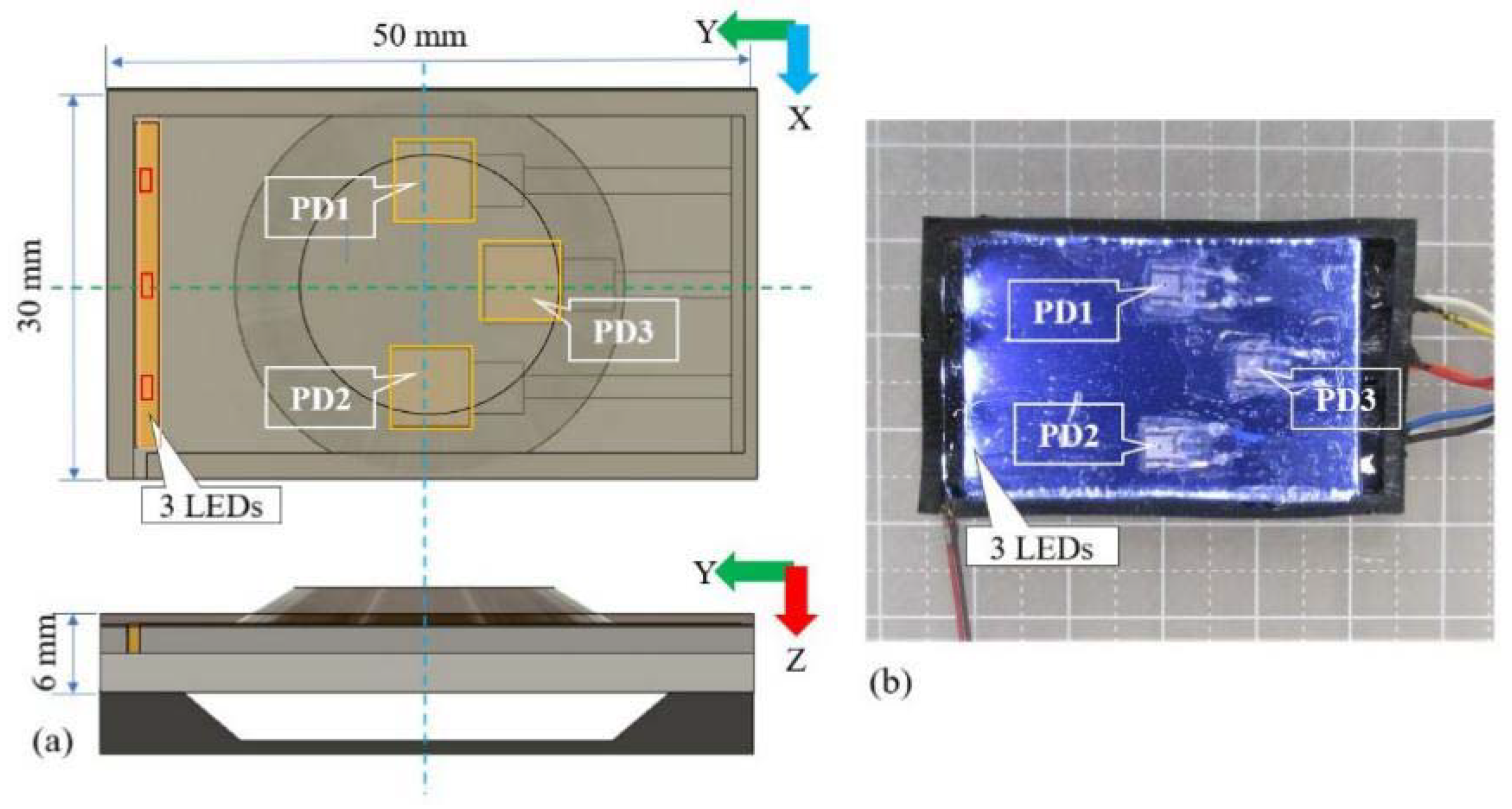
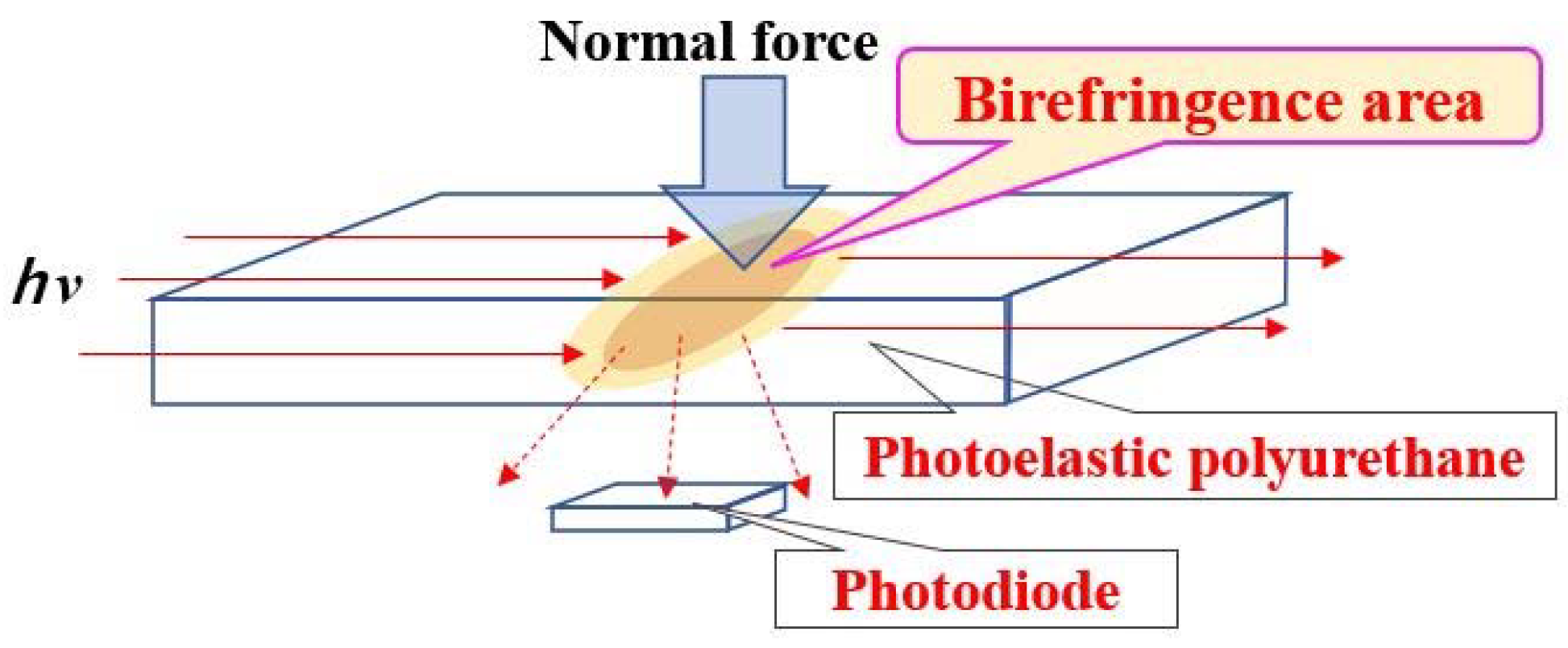
2.1. Outline
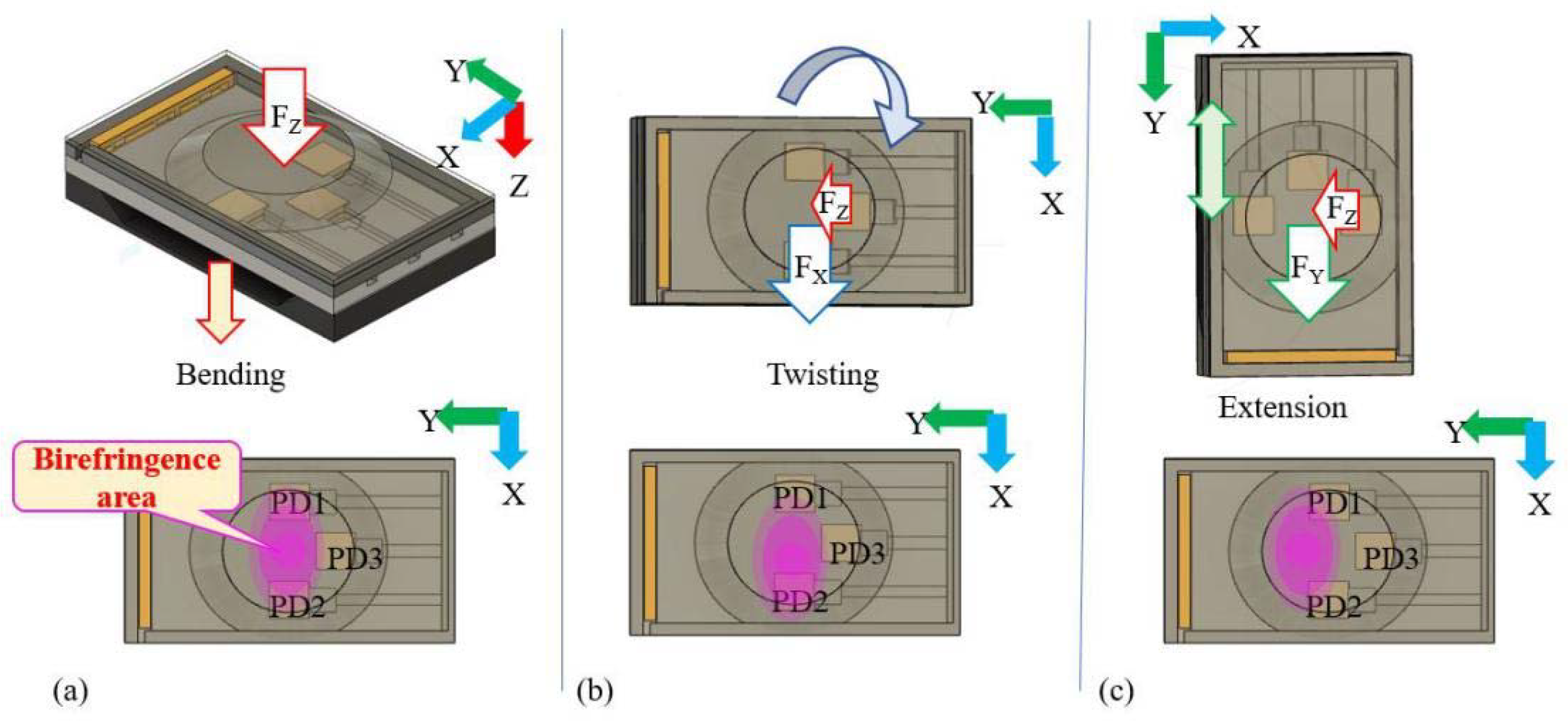
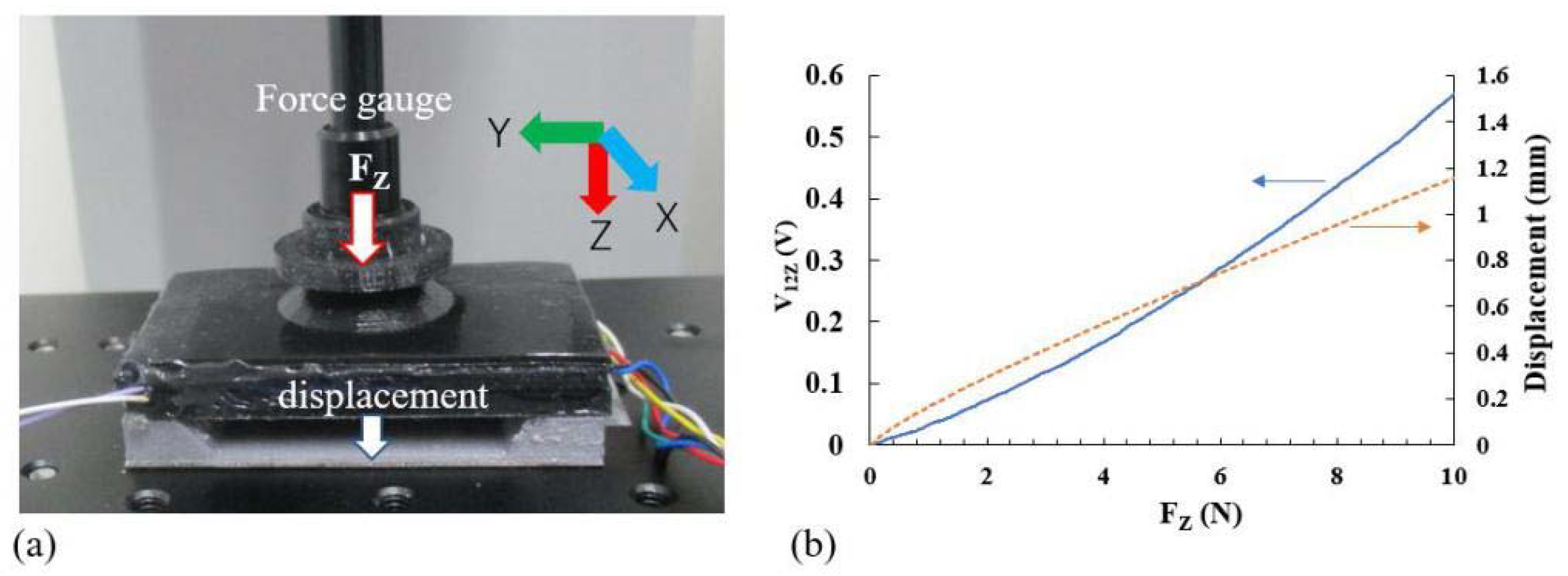
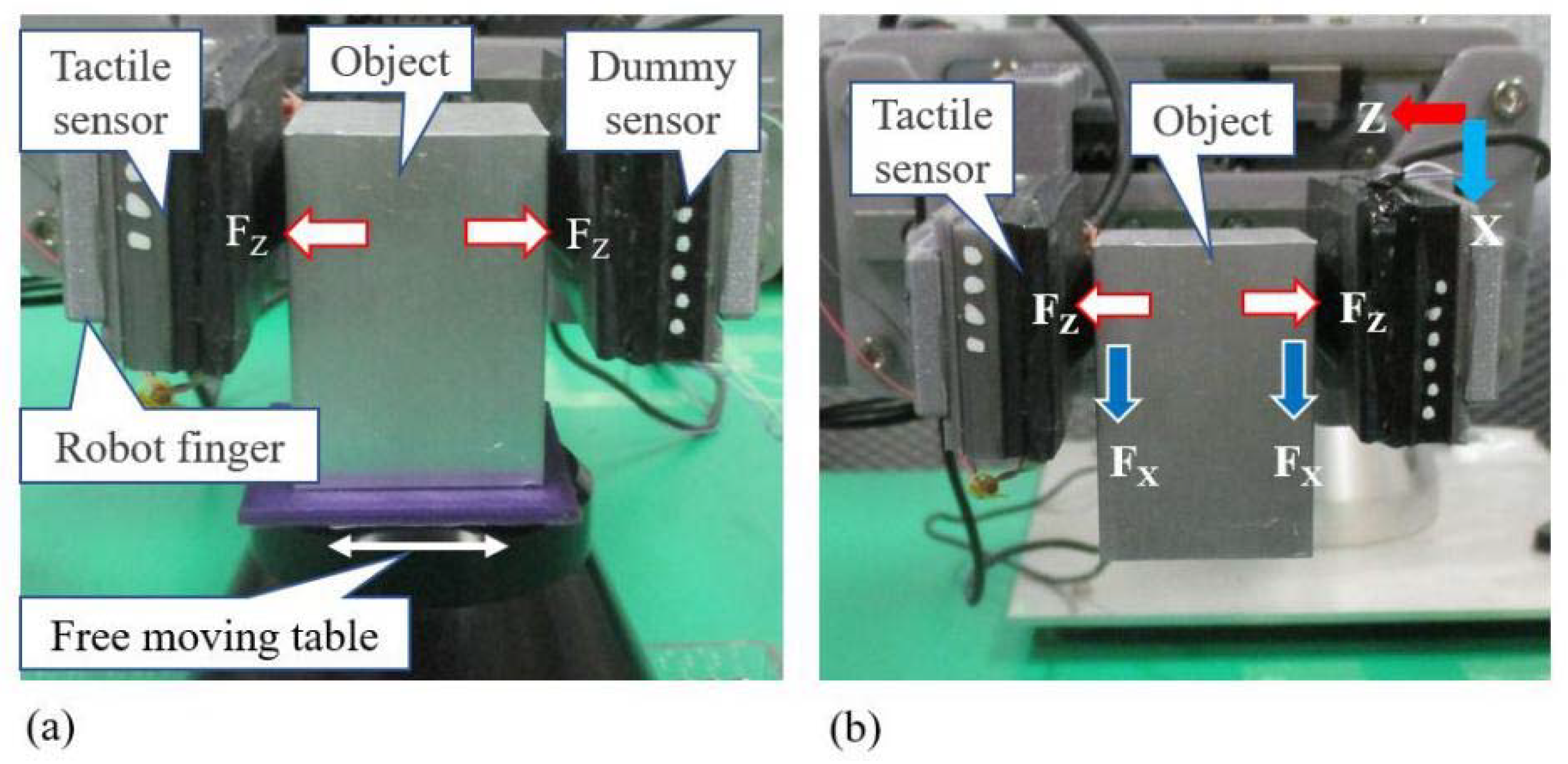
2.2. Measurement of Normal Force FZ
2.3. Measurement of Tangential Force FX
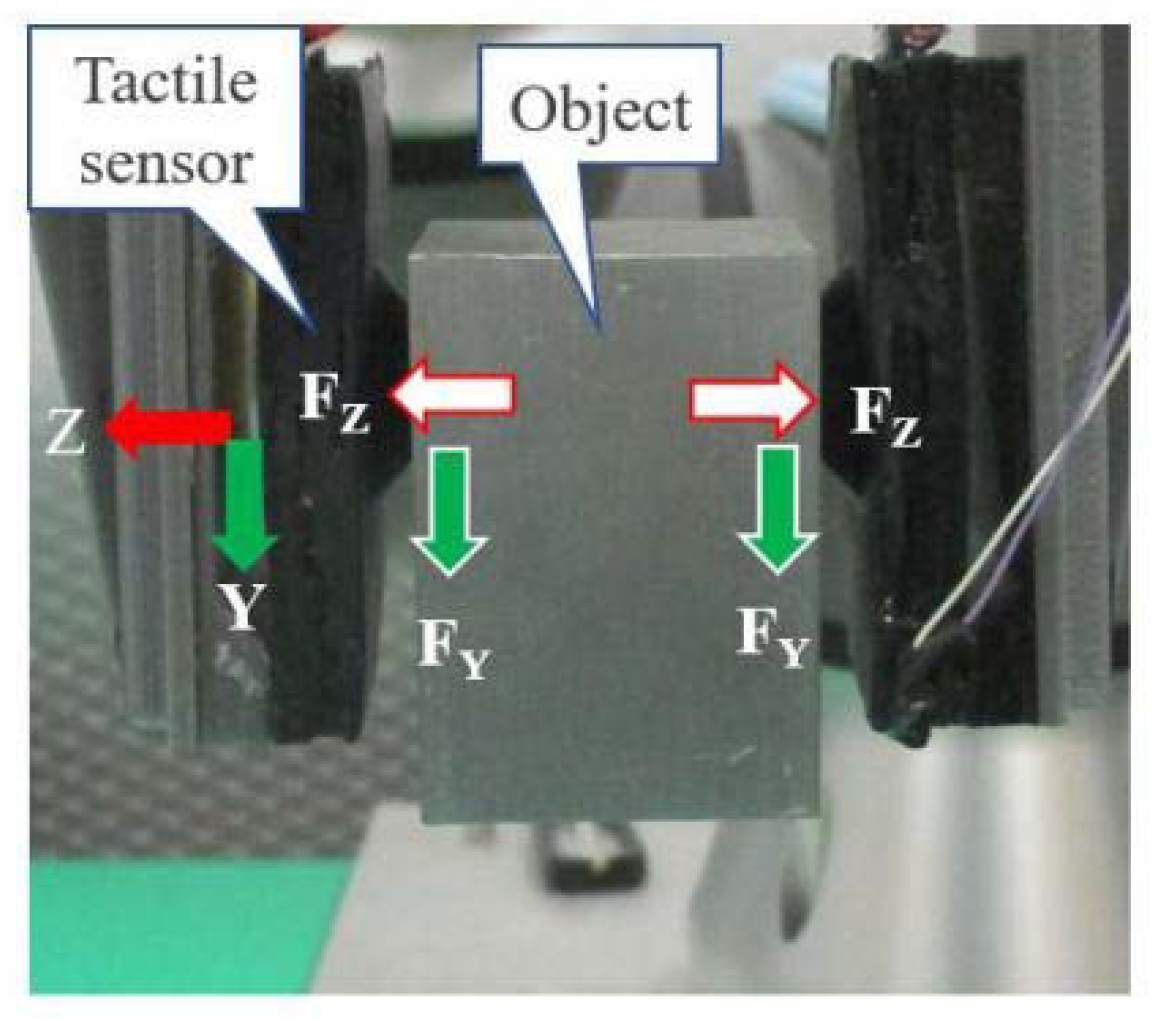
2.4. Measurement of Tangential Force FY
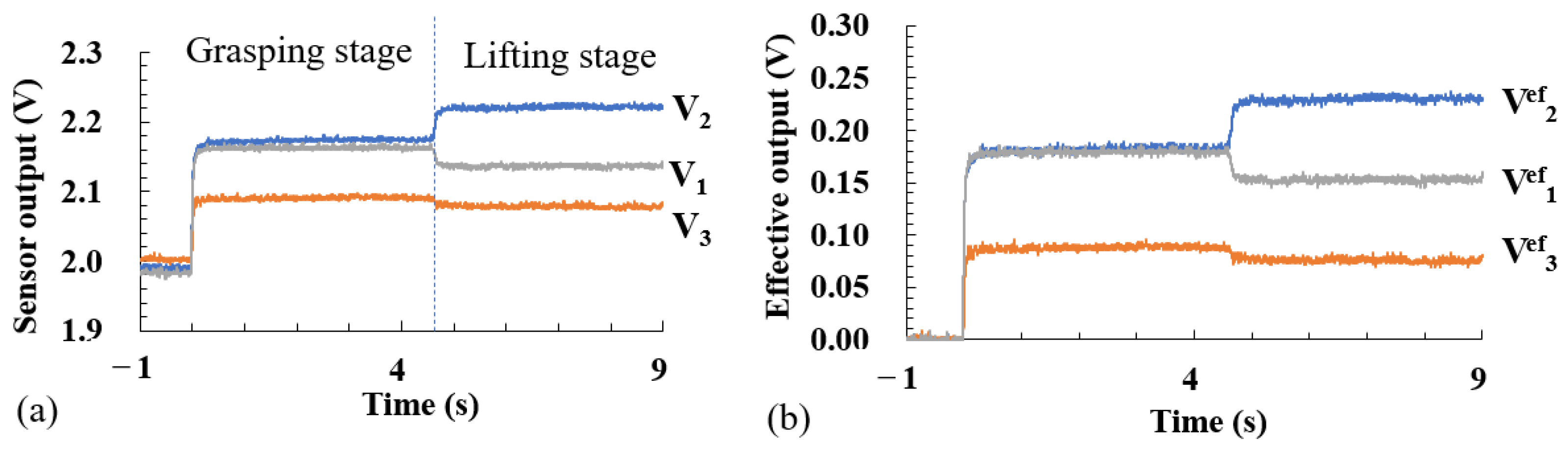
3. Results and Discussion
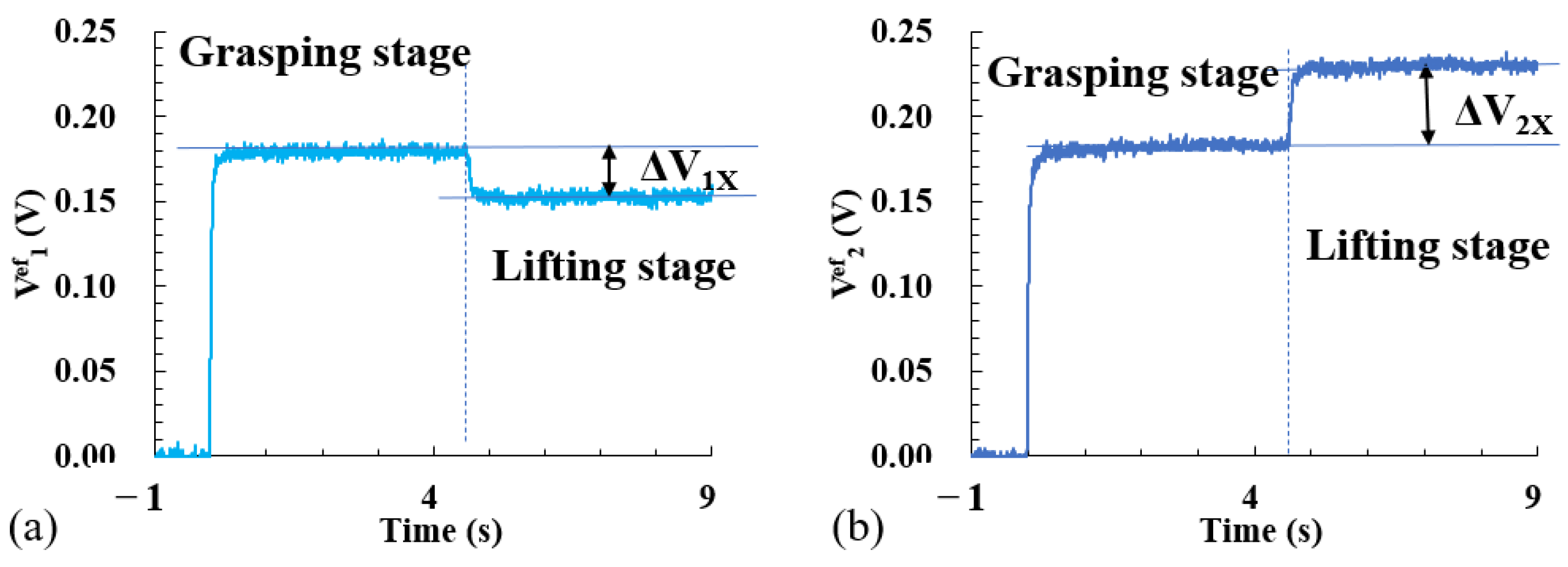
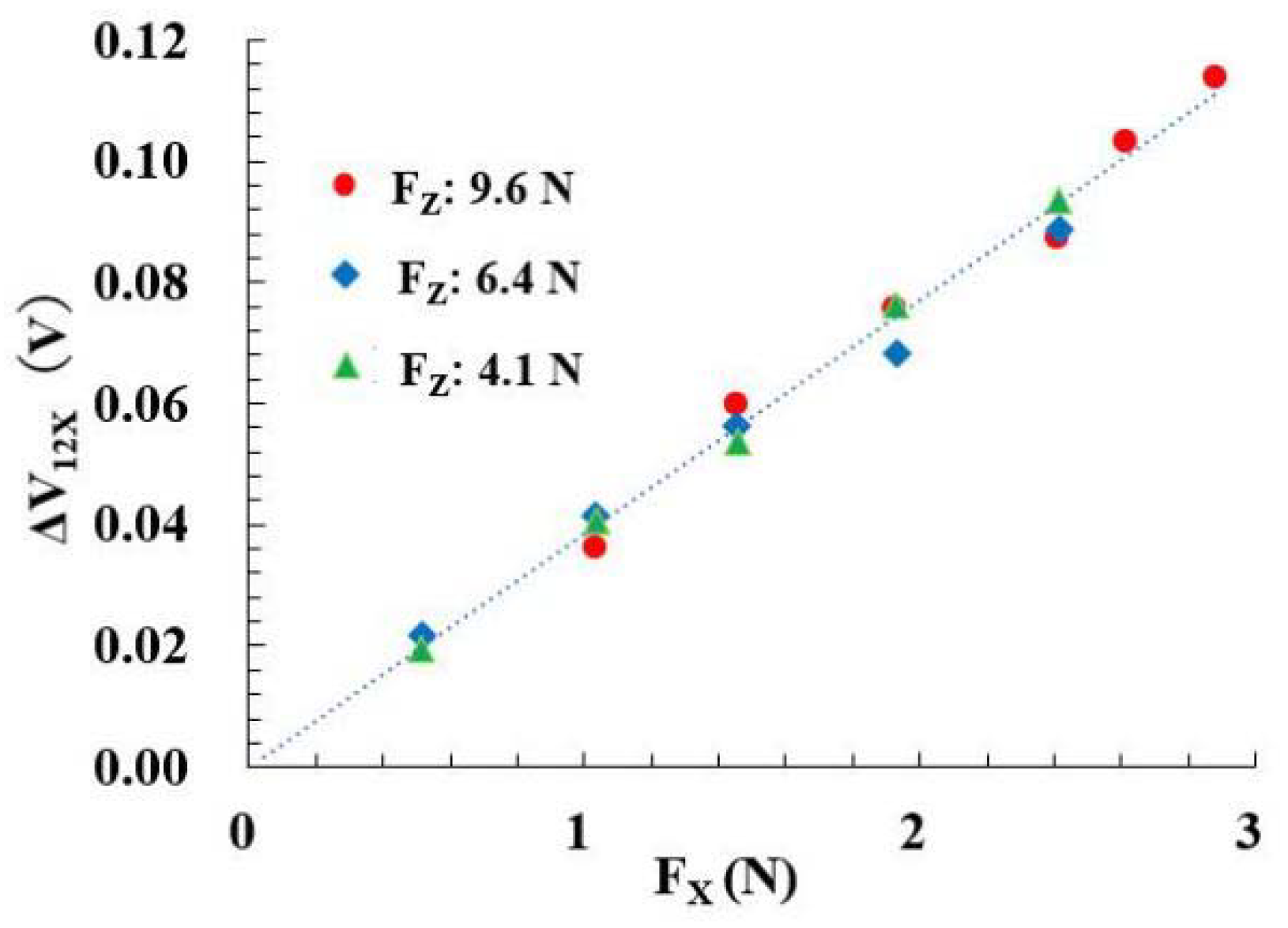
3.1. Analysis Result of Tangential Force FX
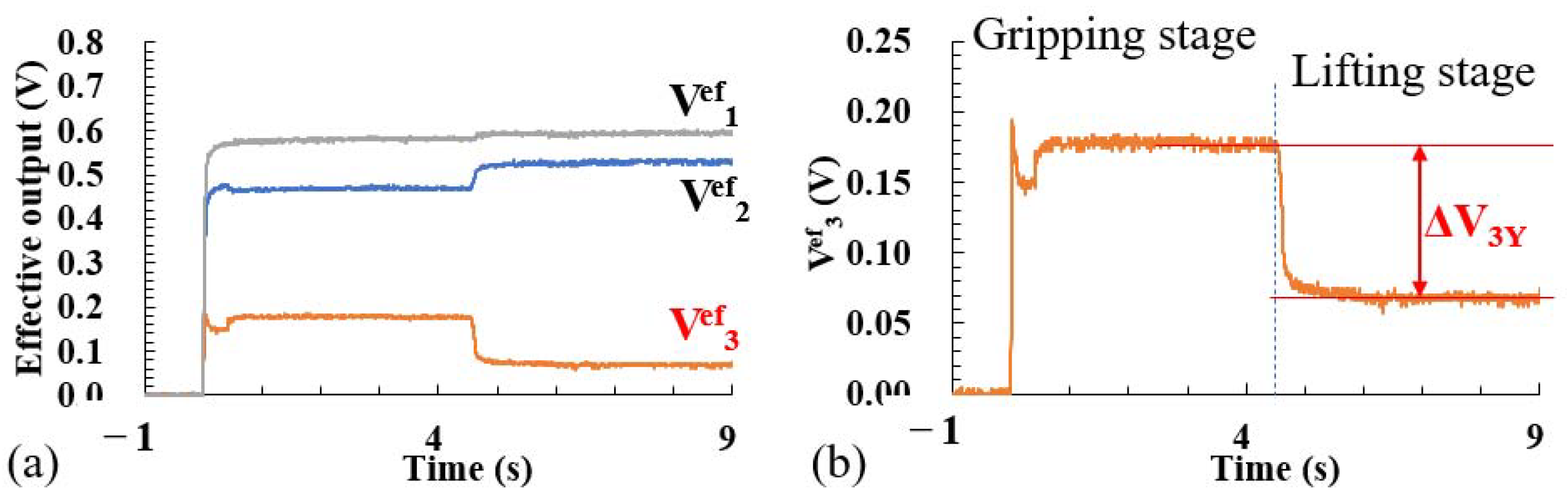
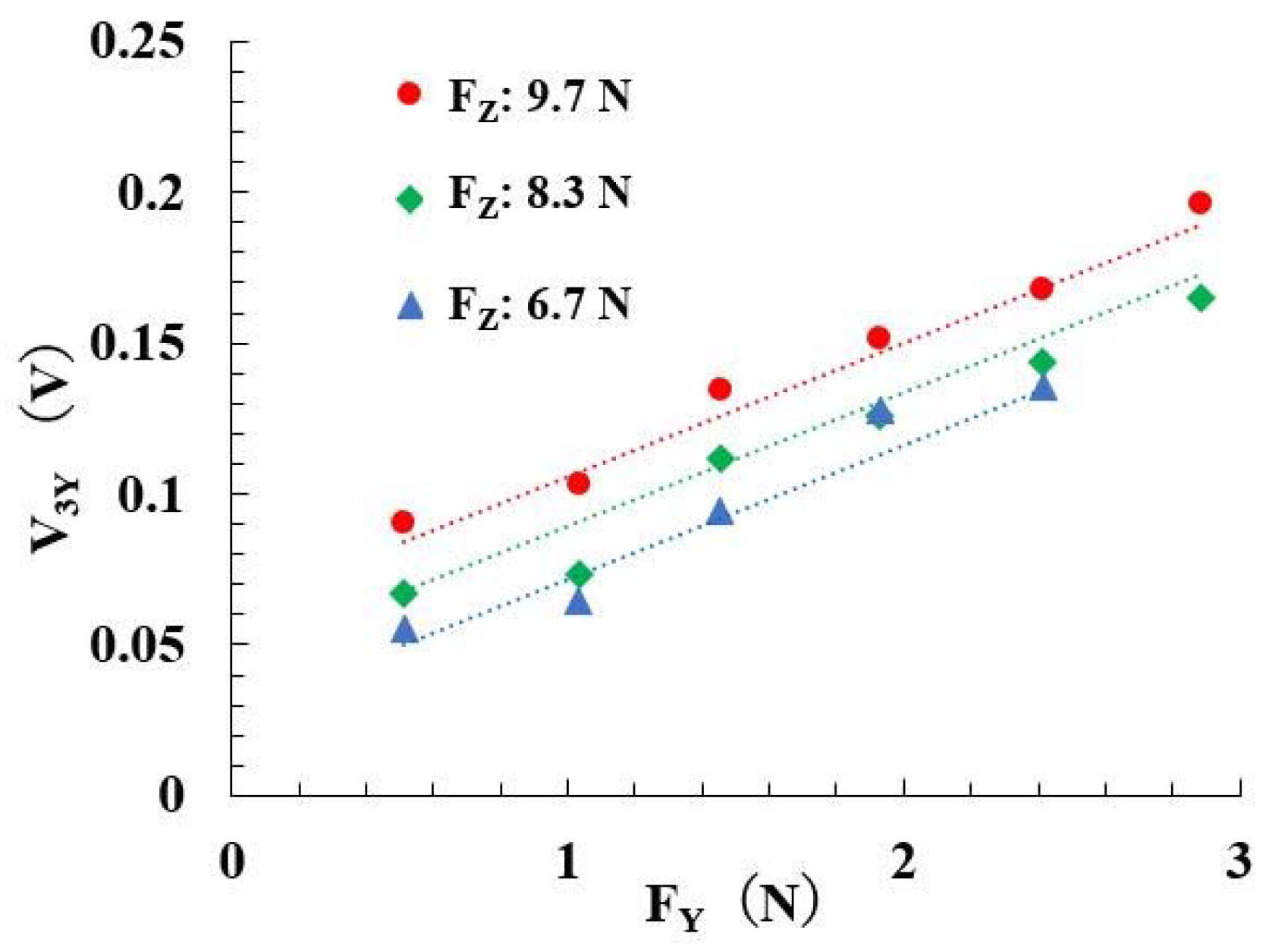
3.2. Analysis Result of Tangential Force FY
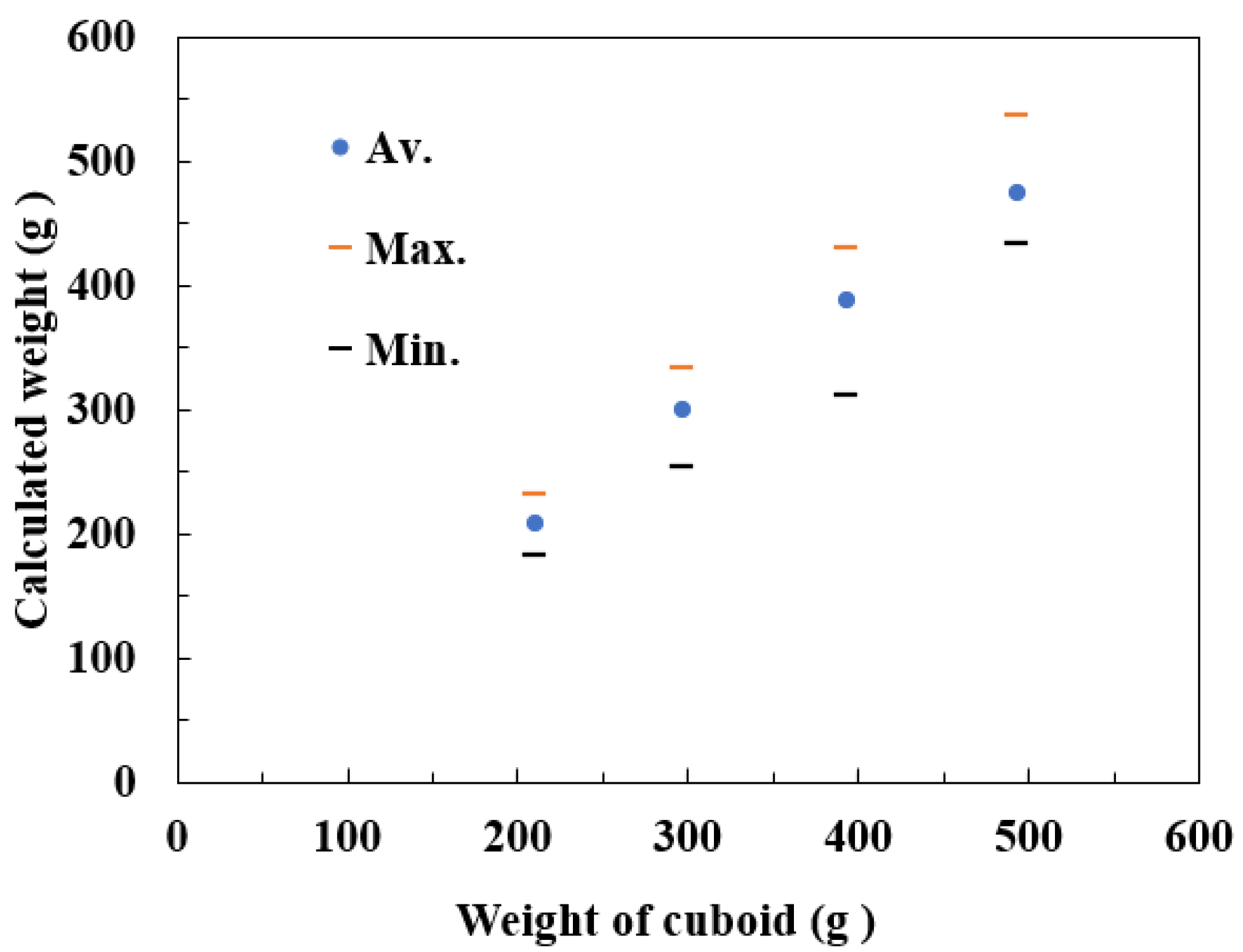
3.3. Accuracy of Measured Tangential Force
3.4. Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Ren, Z.; Xie, H.; Ju, Y. Quantification of Photoelastic Fringe Orders Using Polarized Light Camera and Continuous Loading. Opt. Lasers Eng. 2020, 134, 106263–106270. [Google Scholar] [CrossRef]
- Daniels, K.E.; Kollmer, J.E. Photoelastic Force Measurements in Granular Materials. Rev. Sci. Instrum. 2017, 88, 51808–51830. [Google Scholar] [CrossRef]
- Scafidi, M.; Pitarresi, G.; Toscano, A.; Petrucci, G.; Alessi, S.; Ajovalasit, A. Review of Photoelastic Image Analysis Applied to Structural Birefringent Materials: Glass and Polymers. Opt. Eng. 2015, 54, 81206–81213. [Google Scholar] [CrossRef]
- Ham, S.; Kown, T. Photoelastic Observation of Toughness-Dominant Hydraulic Fracture Propagation Across an Orthogonal Discontinuity in Soft, Viscoelastic Layered Formations. Int. J. Rock Mech. Min. Sci. 2020, 134, 104438–104452. [Google Scholar] [CrossRef]
- Adelfar, M.; Tavangar, R.; Horandghadim, N.; Khalil-Allafi, J. Evaluation Superelastic and Shape Memory Effects Using the Photostress Technique. Mater. Today Commun. 2020, 24, 101156–101164. [Google Scholar] [CrossRef]
- Wu, Z.L.; Sawada, D.; Kurokawa, T.; Kakugo, A.; Yang, W.; Fukuhara, H.; Gong, J.P. Strain-Induced Molecular Reorientation and Birefringence Reversion of a Robust, Anisotropic Double-network Hydrogel. Macromolecules 2011, 44, 3542–3547. [Google Scholar] [CrossRef]
- Mott, P.H.; Roland, C.M. Birefringence of Rubber during Creep and Recovery. Macromolecules 1996, 29, 8492–8496. [Google Scholar] [CrossRef][Green Version]
- Mukashev, D.; Zhuzbay, N.; Koshkinbayeva, A.; Orazbayev, B.; Kappassov, Z. Photo Elastic Finger: Robot Tactile Fingertip Based on Photoelastic Effect. Sensors 2022, 22, 6807. [Google Scholar] [CrossRef]
- Shimonomura, K. Tactile Image Sensors Employing Camera: A Review. Sensors 2019, 19, 3933. [Google Scholar] [CrossRef]
- Yamaguchi, A.; Atkeson, C.G. Recent Progress in Tactile Sensing and Sensors for Robotic Manipulation: Can We Turn Tactile Sensing into Vision? Adv. Robot. 2019, 33, 661–673. [Google Scholar] [CrossRef]
- Lepora, N.F.; Lin, Y.; Money-Coomes, B.; Lloyd, J. DigiTac: A DIGIT-TacTip Hybrid Tactile Sensor for Comparing Low-Cost High-Resolution Robot Touch. IEEE Robot. Autom. Lett. 2022, 7, 9382–9388. [Google Scholar] [CrossRef]
- Yun, S.; Park, S.; Park, B.; Kim, Y.; Park, S.K.; Nam, S.; Kyung, K.U. Polymer-waveguide-based flexible tactile sensor array for dynamic response. Adv. Mater. 2014, 26, 4474–4480. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.D.; Lee, J.S. Recent Development of Flexible Tactile Sensors and Their Applications. Sensors 2022, 22, 50. [Google Scholar] [CrossRef] [PubMed]
- Bertholds, A.; Dändliker, R. High-resolution photoelastic pressure sensor using low-birefringence fiber. Appl. Opt. 1986, 25, 340–343. [Google Scholar] [CrossRef]
- Agarwal, P.; Zhou, W.; Roy, R.; Chang, S.; Liu, X. Photoelastic Birefringence of Copolymers with Non-planar Structure. Polymer 2019, 164, 217–222. [Google Scholar] [CrossRef]
- Seif, S.; Cakmak, M. Stress-Optical Behavior of Poly (m-xylylenediamine adipamide) (NylonMXD6): Influence of Molecular Weight. Polymer 2010, 51, 3762–3773. [Google Scholar] [CrossRef]
- Ebisawa, M.; Otani, Y.; Umeda, N. Mechanical Characterization Measurement of Polymer Material under Stress by Birefringence Microscope. Opt. Rev. 2007, 14, 310–313. [Google Scholar] [CrossRef]
- Dubey, V.N.; Crowder, R.M. A Dynamic Tactile Sensor on Photoelastic Effect. Sens. Actuators A Phys. 2006, 128, 217–224. [Google Scholar] [CrossRef][Green Version]
- Dubey, V.; Grewal, G.; Claremont, D. Load Extraction from Photoelastic Images using Neural Networks. Exp. Mech. 2007, 47, 263–270. [Google Scholar] [CrossRef]
- Chung, D.; Merat, F.L.; Discenzo, F.M.; Harris, J.S. Neural Net based Torque Sensor Using Birefringent Materials. Sens. Actuators A Phys. 1998, 70, 243–249. [Google Scholar] [CrossRef]
- Kollmer, J.E.; Daniels, K.E. Betweenness Centrality as Predictor for Forces in Granular Packings. Soft Matter 2019, 15, 1793–1798. [Google Scholar] [CrossRef] [PubMed]
- Dubey, V.N.; Grewal, G.S. Efficacy of Photoelasticity in Developing Whole-field Imaging Sensors. Opt. Lasers Eng. 2010, 48, 288–294. [Google Scholar] [CrossRef]
- Sato, T.; Mamiya, H.; Koike, H.; Fukuchi, K. Photoelastic Touch: Transparent Rubbery Tangible Interface using an LCD and Photoelasticity. In Proceedings of the 22nd Annual ACM Symposium on User Interface Software and Technology, Victoria, BC, Canada, 4–7 October 2009; pp. 43–50. [Google Scholar]
- Abed Zadeh, A.; Barés, J.; Brzinski, T.A.; Daniels, K.E.; Dijksman, J.; Docquier, N.; Everitt, H.O.; Kollmer, J.E.; Lantsoght, O.; Wang, D.; et al. Enlightening Force Chains: A Review of Photoelasticimetry in Granular Matter. Granul. Matter 2019, 21, 83. [Google Scholar] [CrossRef]
- Takarada, J.; Mitsuzuka, M.; Sugino, Y.; Mori, T.; Kinbara, Y.; Kageoka, M.; Tawa, T.; Kawamura, S.; Tajitsu, Y. Evaluation of Gripping Sensor using Polyurethane with High Photoelastic Constant. Jpn. J. Appl. Phys. 2021, 60, SFFD03-1–SFFD03-5. [Google Scholar] [CrossRef]
- Zou, L.; Ge, C.; Wang, Z.J.; Cretu, E.; Li, X. Novel Tactile Sensor Technology and Smart Tactile Sensing Systems: A Review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef]
- Mitsuzuka, M.; Kinbara, Y.; Fukuhara, M.; Nakahara, M.; Nakano, T.; Takarada, J.; Wang, Z.; Mori, Y.; Kageoka, M.; Tawa, T.; et al. Relationship between Photoelasticity of Polyurethane and Dielectric Anisotropy of Diisocyanate, and Application of High-photoelasticity Polyurethane to Tactile Sensor for Robot Hands. Polymers 2020, 13, 143. [Google Scholar] [CrossRef]
- Mitsuzuka, M.; Yamasaki, S.; Tajitsu, Y. Photoelastic Polyurethane Resin, Detection Member, Robot, and Method for Producing Photoelastic Polyurethane Resin. U.S. Patent 10,626,213, 21 April 2020. [Google Scholar]
- Mori, Y.; Fukuhara, M.; Zhu, M.; Kinbara, Y.; Wada, A.; Mitsuzuka, M.; Tajitsu, Y.; Kawamura, S. Feedback Control of a Pneumatically Driven Soft Fnger using a Potoelastic Plyurethane Bnding Sensor. Adv. Robot. 2021, 34, 771–786. [Google Scholar] [CrossRef]
- Amimori, I.; Priezjev, N.; Pelcovits, R.A.; Crawford, G.P. Optomechanical Properties of Stretched Polymer Dispersed Liquid Crystal Films for Scattering Polarizer Applications. J. Appl. Phys. 2003, 93, 3248–3252. [Google Scholar] [CrossRef]
- Sun, T.; Liu, T.; He, H.; Wu, J.; Ma, H. Distinguishing Anisotropy Orientations Originated from Scattering and Birefringence of Turbid Media Using Mueller Matrix Derived Parameters. Opt. Lett. 2018, 43, 4092–4095. [Google Scholar] [CrossRef]
- Asgharian, N.; Schelly, Z.A. Electric Field-induced Transient Birefringence and Light Scattering of Synthetic Liposomes. Biochim. Et Biophys. Acta-Biomembr. 1999, 1418, 295–306. [Google Scholar] [CrossRef][Green Version]
- Borovkova, M.A.; Bykov, A.V.; Popov, A.; Meglinski, I.V. Role of Scattering and Birefringence in Phase Retardation Revealed by Locus of Stokes Vector on Poincaré Sphere. J. Biomed. Opt. 2020, 25, 057001–057013. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Haro, J.M.; Ona, E.D.; Hernandez-Vicen, J.; Martinez, S.; Balaguer, C. Service Robot in Catering Applications: A Review and Future Challenges. Electronics 2021, 10, 47. [Google Scholar] [CrossRef]
- Shimmura, T.; Ichikari, R.; Okuma, T.; Ito, H.; Okada, K.; Nonaka, T. Service Robot Introduction to a Restaurant Enhances both Labor Productivity and Service Quality. Procedia CIRP 2020, 88, 589–594. [Google Scholar] [CrossRef]
- Gozalez-Aguirre, J.A.; Osorio-Oliveros, R.; Rodoriguez-Hernandez, K.L.; Lizarraga-Iturralde, J.; Menendez, R.M.; Ramirez-Mendoza, R.A.; Ramirez-Moreno, M.A.; Lozoya-Santos, J.J. Service Robots: Trends and Technology. Appl. Sci. 2021, 11, 10702. [Google Scholar] [CrossRef]
- Zhu, J.; Ji, S.; Yu, J.; Shao, H.; Wen, H.; Zhuang, H.; Xia, Z.; Zhang, Z.; Lee, C. Machine Learning-augmented Wearable Triboelectric Human-machine Interface in Motion Identification and Virtual Reality. Nano Energy 2022, 103, 107766–107774. [Google Scholar] [CrossRef]
- Zhuang, Q.; Jin, T.; Cai, J.; Xu, L.; He, T.; Wang, T.; Tian, Y.; Li, L.; Peng, Y.; Lee, C. Wearable Triboelectric Sensors Enable Gait Analysis and Waist Motion Capture for IoT-Based Smart Healthcare Applications. Adv. Sci. 2022, 9, 2103694–2103706. [Google Scholar] [CrossRef]
- Anwer, A.H.; Khan, N.; Ansari, M.Z.; Beak, S.; Yi, H.; Kim, S.; Noh, S.M.; Jeong, C. Recent Advances in Touch Sensors for Flexible Wearable Devices. Sensors 2022, 22, 4460. [Google Scholar] [CrossRef]
- Wang, H.; Han, M.; Song, Y.; Zhang, H. Design, Manufacturing and Application of Wearable Triboelectric Nanogenerators. Nano Energy 2021, 81, 105627–105644. [Google Scholar] [CrossRef]
- Zhong, W.; Ming, X.; Li, W.; Jia, K.; Jiang, H.; Ke, Y.; Li, M.; Wang, D. Wearable Human-Machine Interaction Device Integrated by All-Textile-Based Tactile Sensors Array via Facile Cross-Stich. Sens. Actuators A Phys. 2022, 333, 113240–113248. [Google Scholar] [CrossRef]
- Ramani, P.; Shojaei, A. A Review on the Features, Performance and Potential Applications of Hydrogel-Based Wearable Strain/Pressure Sensors. Adv. Colloid Interface Sci. 2021, 298, 102553–102578. [Google Scholar] [CrossRef]
- Li, X.; Chen, S.; Peng, Y.; Zheng, Z.; Li, J.; Zhong, F. Material, Preparation Strategies, and Wearable Sensors Applications of Conductive Fibers: A Review. Sensors 2022, 22, 3028. [Google Scholar] [CrossRef] [PubMed]
- Tajitsu, Y.; Takarada, J.; Takatani, K.; Nakanishi, R.; Yanagimoto, H.; Shiomi, S.; Nakagawa, I.; Kawahara, I.; Nakiri, T.; Shimda, S.; et al. Prototype Sensor System Using Fabricated Piezoelectric Braided Cord for Work-Environment Measurement during Work from Home. Micromachines 2021, 12, 966. [Google Scholar] [CrossRef] [PubMed]
- Clarke, D.E.; Perry, R.; Arora, K. Characterization of CMOS IC photodiodes using focused laser sources. In Proceedings of the SOUTHEASTCON ’96, Tampa, FL, USA, 11–14 April 1996; pp. 381–384. [Google Scholar]
- Lin, W.; Wang, B.; Peng, G.; Shan, Y.; Hu, H.; Yang, Z. Skin-Inspired Piezoelectric Tactile Sensor Array with Crosstalk-Free Row+Column Electrodes for Spatiotemporally Distinguishing Diverse Stimuli. Adv. Sci. 2021, 8, 2002817–2002827. [Google Scholar] [CrossRef] [PubMed]
- Dzedzickis, A.; Sutinys, E.; Bucinskas, V.; Samukaite-Bubniene, U.; Jakstys, B.; Ramanavicius, A.; Morkvenaite-Vilkonciene, I. Polyethylene-Carbon Composite (Velostat®) Based Tactile Sensor. Polymers 2020, 12, 2905. [Google Scholar] [CrossRef]
- Gao, S.; Weng, L.; Deng, Z.; Wang, B.; Huang, W. Biomimetic Tactile Sensor Array Based on Magnetostrictive Materials. IEEE Sens. J. 2021, 21, 13116–13124. [Google Scholar] [CrossRef]
- Jones, D.; Wang, L.; Ghanbari, A.; Vardakastani, V.; Kedgley, A.E.; Gardiner, M.D.; Vincent, T.L.; Culmer, P.R.; Alazmani, A. Design and Evaluation of Magnetic Hall Effect Tactile Sensors for Use in Sensorized Splints. Sensors 2020, 20, 1123. [Google Scholar] [CrossRef]
- Heo, J.S.; Chung, J.H.; Lee, J.J. Tactile Sensor Arrays Using Fiber Bragg Grating Sensors. Sens. Actuators A 2006, 126, 312–327. [Google Scholar] [CrossRef]
- Hwang, E.S.; Seo, J.H.; Kim, Y.J. A Polymer-Based Flexible Tactile Sensor for Both Normal and Shear Load Detections and Its Application for Robotics. J. Microelectromech. Syst. 2007, 16, 556–563. [Google Scholar] [CrossRef]
- Wisitsoraat, A.; Patthanasetakul, V.; Lomas, T.; Tuantranont, A. Low Cost Thin Film Based Piezoresistive MEMS Tactile Sensor. Sens. Actuators A Phys. 2007, 139, 17–22. [Google Scholar] [CrossRef]
- Abels, C.; Mastronardi, V.M.; Guido, F.; Dattoma, T.; Qualtieri, A.; Megill, W.M.; Vittorio, M.D.; Rizzi, F. Nitride-based Materials for Flexible Mems Tactile and Flow Sensors in Robotics. Sensors 2017, 17, 1080. [Google Scholar] [CrossRef]
- Yeo, H.G.; Jung, J.; Sim, M.; Jang, J.E.; Choi, H. Integrated Piezoelectric ALN Thin Film with SU-8/PDMS Supporting Layer for Flexible Sensor Array. Sensors 2019, 20, 315. [Google Scholar] [CrossRef] [PubMed]
- Charalambides, A.; Bergbreiter, S. A Novel All-elastomer MEMS Tactile Sensor for High Dynamic Range Shear and Normal Force Sensing. J. Micromech. Microeng. 2015, 25, 095009–095017. [Google Scholar] [CrossRef]
- Wu, C.; Kim, T.W.; Park, J.H.; Koo, B.; Sung, S.; Shao, J.; Zhang, C.; Wang, Z.L. Self-Powered Tactile Sensor with Learning and Memory. ACS Nano 2020, 14, 1390–1398. [Google Scholar] [CrossRef] [PubMed]
- Friedl, W.A.; Roa, M.A. Experimental Evaluation of Tactile Sensors for Compliant Robotic Hands. Front. Robot. AI 2021, 8, 704416–704429. [Google Scholar] [CrossRef] [PubMed]
- Jung, Y.; Lee, D.-G.; Park, J.; Ko, H.; Lim, H. Piezoresistive Tactile Sensor Discriminating Multidirectional Forces. Sensors 2015, 15, 25463–25473. [Google Scholar] [CrossRef]
- Cirillo, A.; Cirillo, P.; De Maria, G.; Natale, C.; Pirozzi, S. Modeling and Calibration of a Tactile Sensor for Robust Grasping. IFAC Pap. Line 2017, 50–51, 6843–6850. [Google Scholar] [CrossRef]
- Cheng, M.-Y.; Lin, C.-L.; Lai, Y.-T.; Yang, Y.-J. A Polymer-Based Capacitive Sensing Array for Normal and Shear Force Measurement. Sensors 2010, 10, 10211–10225. [Google Scholar] [CrossRef]
- Li, T.; Sun, X.; Shu, X.; Wang, C.; Wang, Y.; Chen, G.; Xue, N. Robot Grasping System and Grasp Stability Prediction Based on Flexible Tactile Sensor Array. Machines 2021, 9, 119. [Google Scholar] [CrossRef]
- Costanzo, M.; De Maria, G.; Natale, C. Two-fingered In-hand Object Handling Based on Force/Tactile Feedback. IEEE Trans. Robot. 2020, 36, 157–173. [Google Scholar] [CrossRef]
- Moisio, S.; Leon, B.; Korkealaakso, P.; Morales, A. Model of Tactile Sensors using Soft Contacts and Its Application in Robot Grasping Simulation. Robot. Auton. Syst. 2013, 6, 1–12. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, G.; Li, J. Accuracy Improvement of Demodulating the Stress Field with Stress Unet in Photoelasticity. Appl. Opt. 2022, 61, 8678–8687. [Google Scholar] [CrossRef] [PubMed]
- Sandybayeva, D.; Kappassov, Z.; Orazbayev, B. Vibro Touch: Active Sensor for Contact Detection and Force Sensing via Vibrations. Sensors 2022, 22, 6456. [Google Scholar] [CrossRef] [PubMed]
- Ding, D.; Styler, B.; Chung, C.; Houriet, A. Development of a Vision-Guided Shared-Control System for Assistive Robotic Manipulators. Sensors 2022, 22, 4351. [Google Scholar] [CrossRef] [PubMed]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitsuzuka, M.; Takarada, J.; Kawahara, I.; Morimoto, R.; Wang, Z.; Kawamura, S.; Tajitsu, Y. Application of High-Photoelasticity Polyurethane to Tactile Sensor for Robot Hands. Polymers 2022, 14, 5057. https://doi.org/10.3390/polym14235057
Mitsuzuka M, Takarada J, Kawahara I, Morimoto R, Wang Z, Kawamura S, Tajitsu Y. Application of High-Photoelasticity Polyurethane to Tactile Sensor for Robot Hands. Polymers. 2022; 14(23):5057. https://doi.org/10.3390/polym14235057
Chicago/Turabian StyleMitsuzuka, Masahiko, Jun Takarada, Ikuo Kawahara, Ryota Morimoto, Zhongkui Wang, Sadao Kawamura, and Yoshiro Tajitsu. 2022. "Application of High-Photoelasticity Polyurethane to Tactile Sensor for Robot Hands" Polymers 14, no. 23: 5057. https://doi.org/10.3390/polym14235057
APA StyleMitsuzuka, M., Takarada, J., Kawahara, I., Morimoto, R., Wang, Z., Kawamura, S., & Tajitsu, Y. (2022). Application of High-Photoelasticity Polyurethane to Tactile Sensor for Robot Hands. Polymers, 14(23), 5057. https://doi.org/10.3390/polym14235057