
Hierarchical Wrinkles for Tunable Strain Sensing Based on Programmable, Anisotropic, and Patterned Graphene Hybrids

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
3. Results
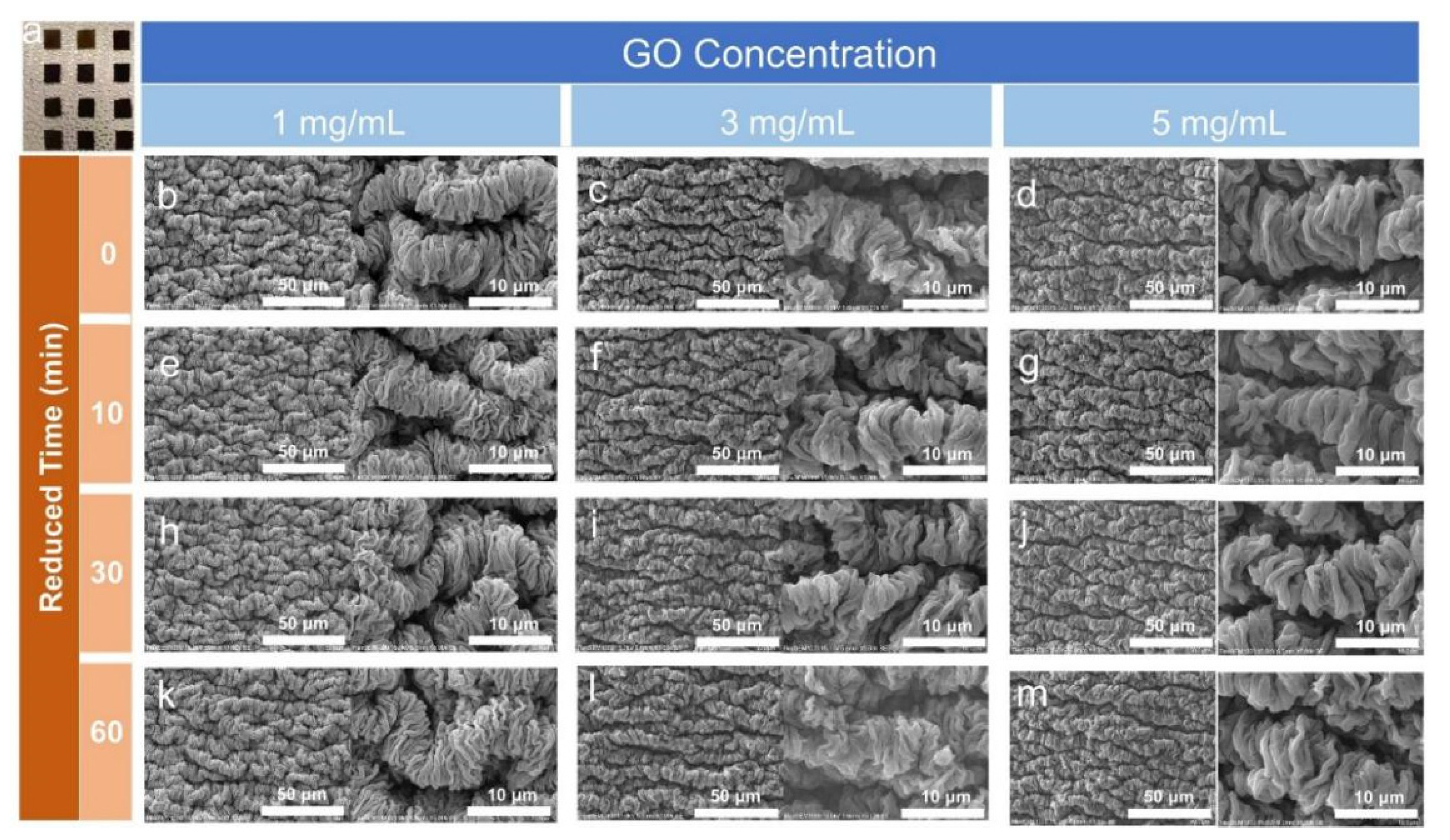
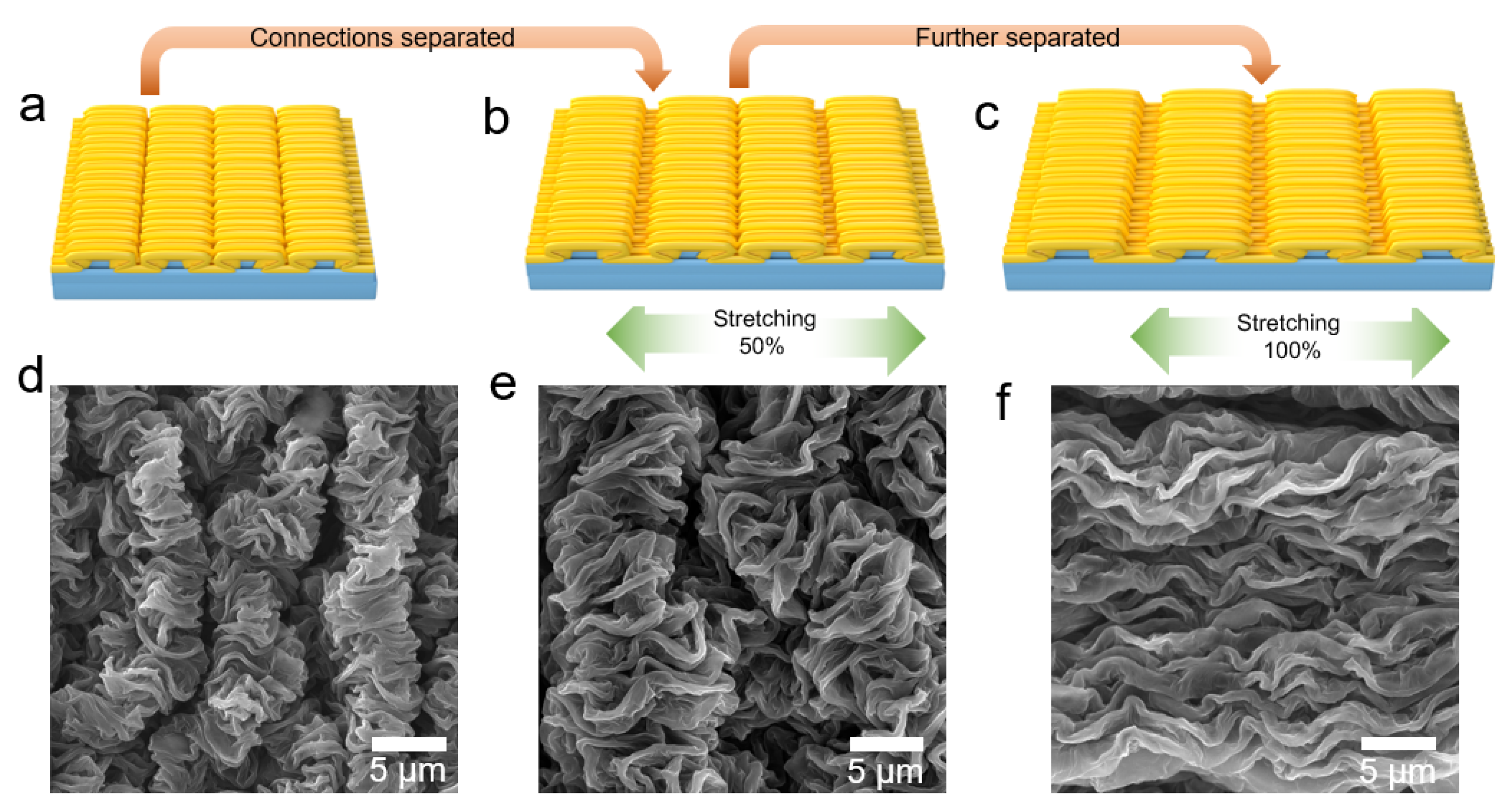
3.1. Microstructure Evolutions of PWG@R
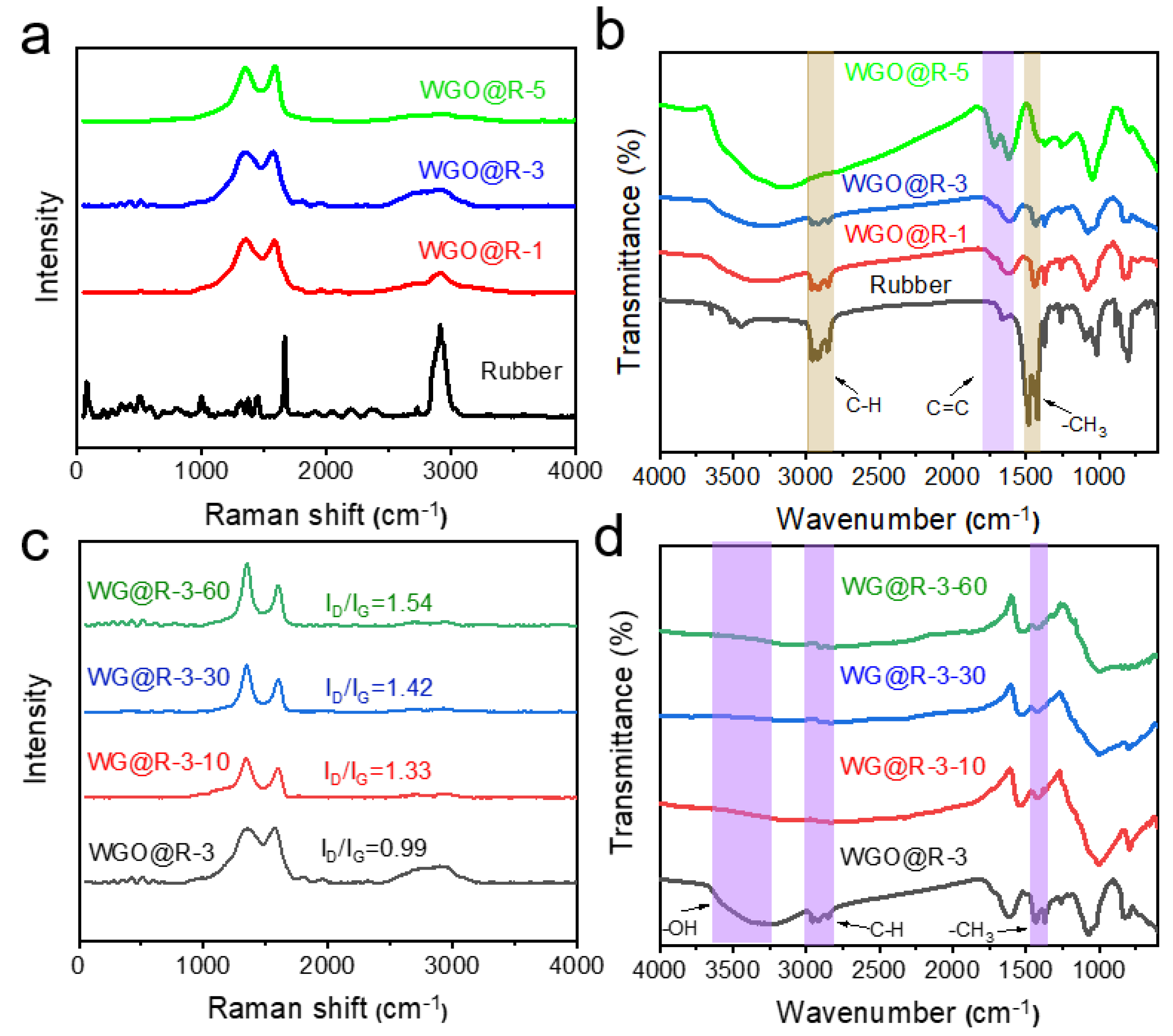
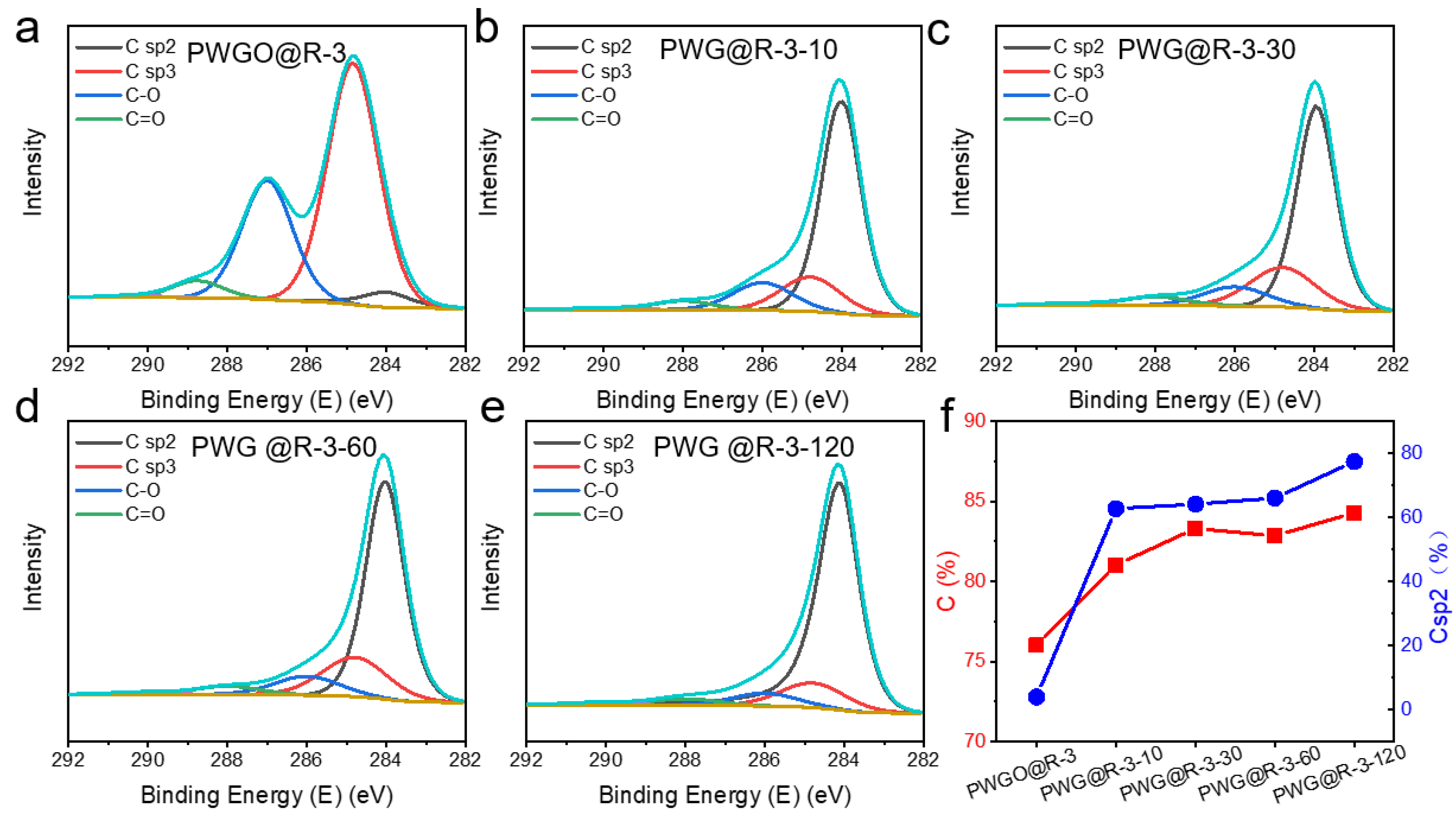
3.2. Physical and chemical properties of WG@R
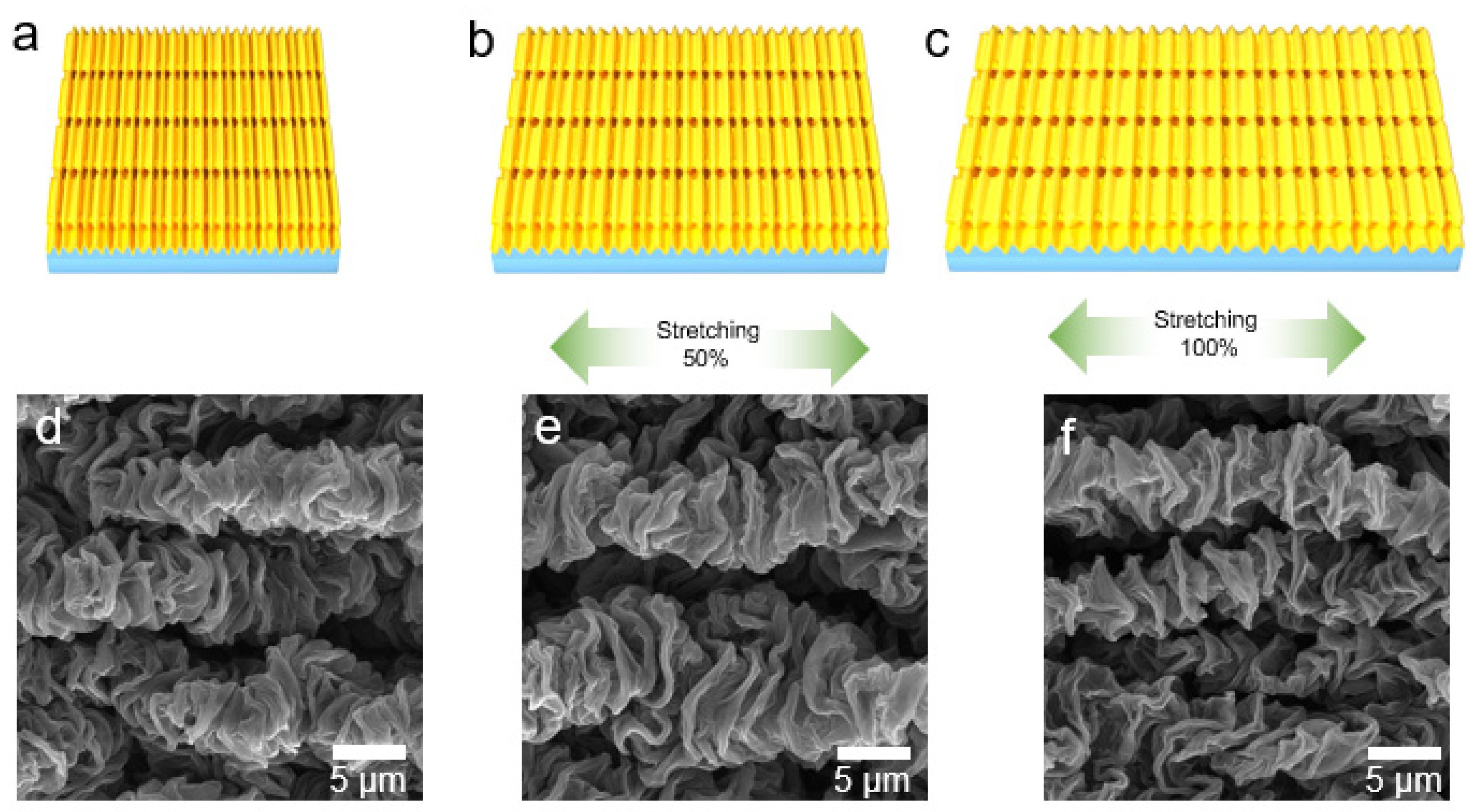
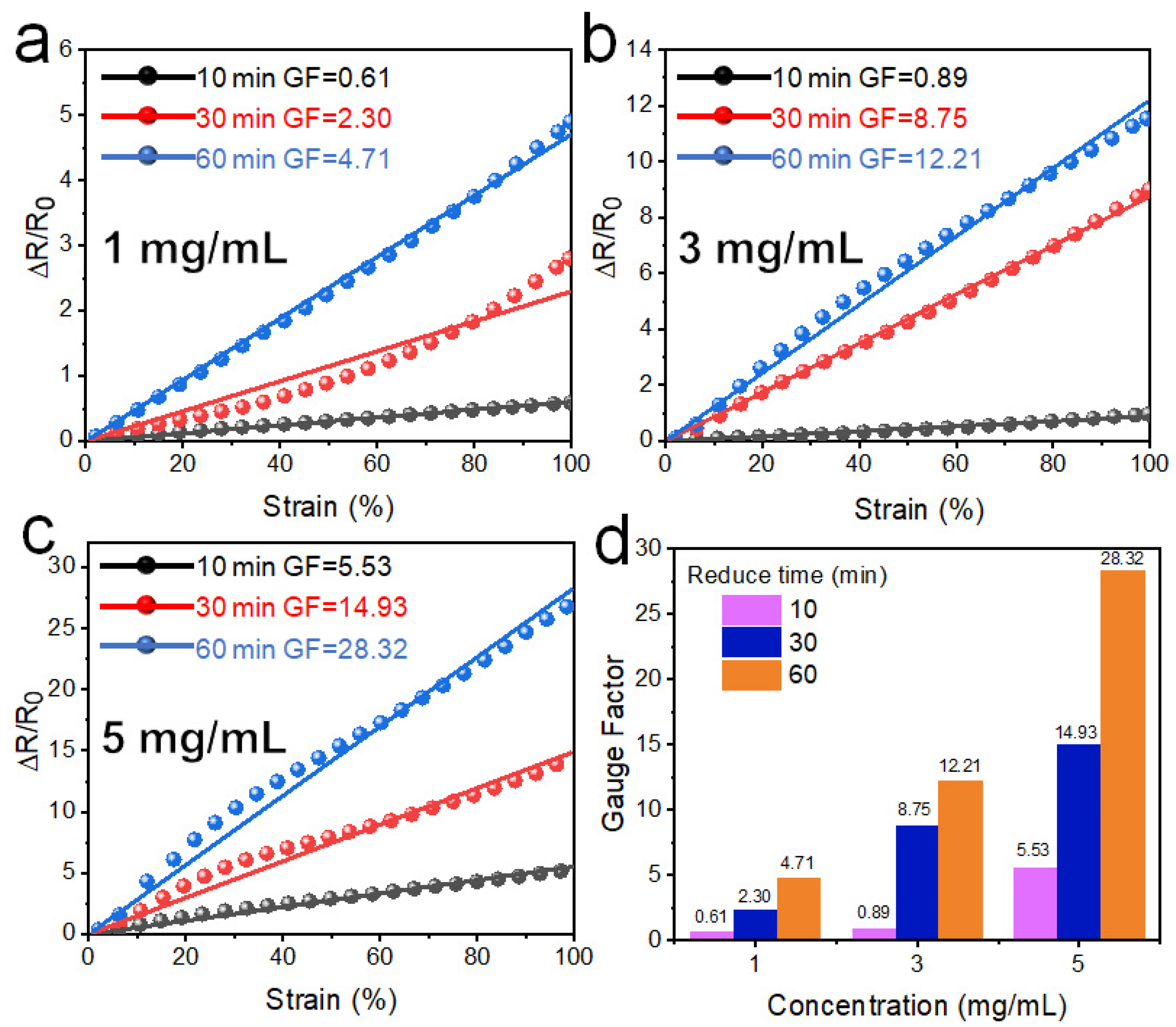
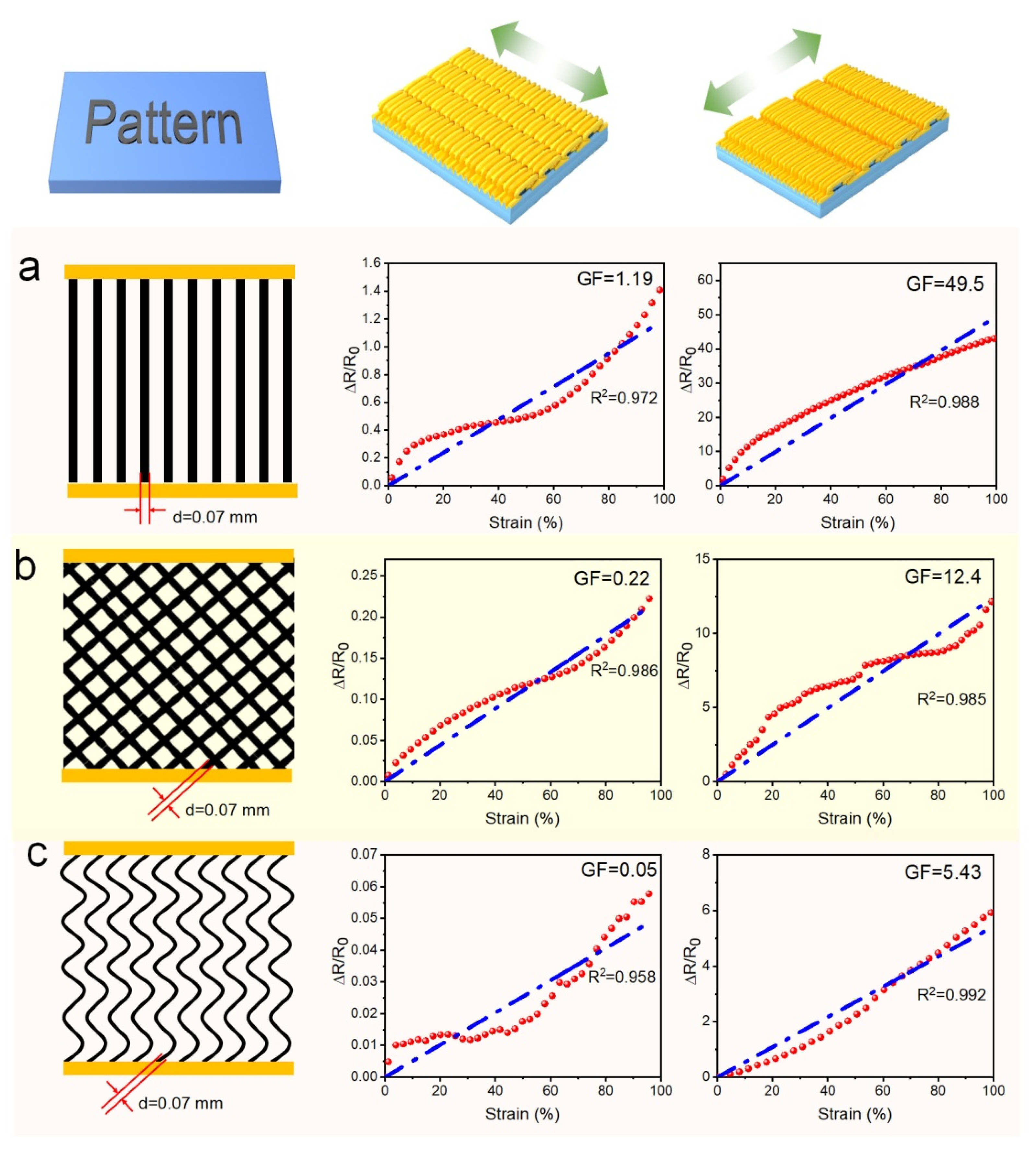
3.3. Strain-Sensing Properties of WG@R and PWG@R
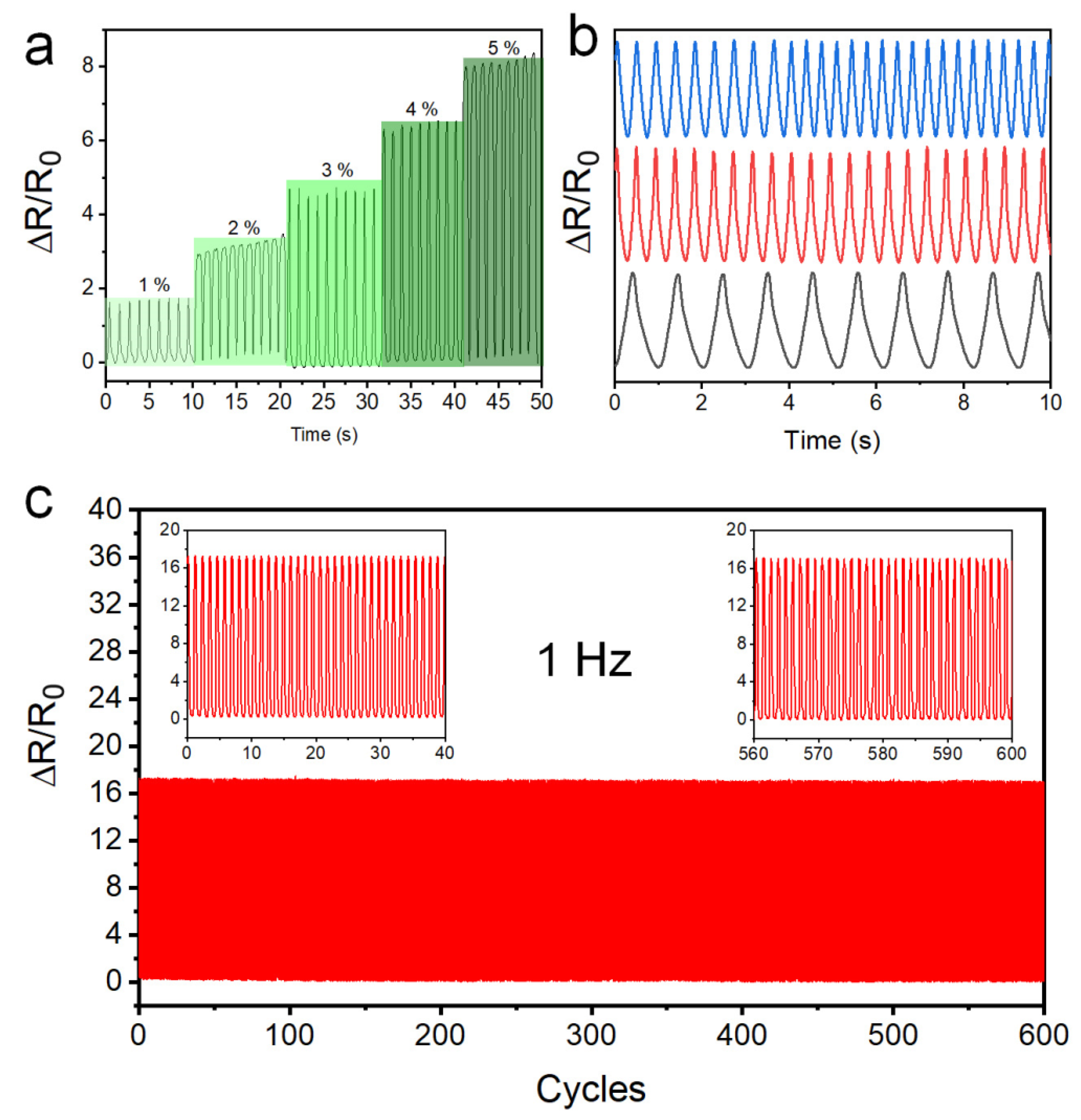
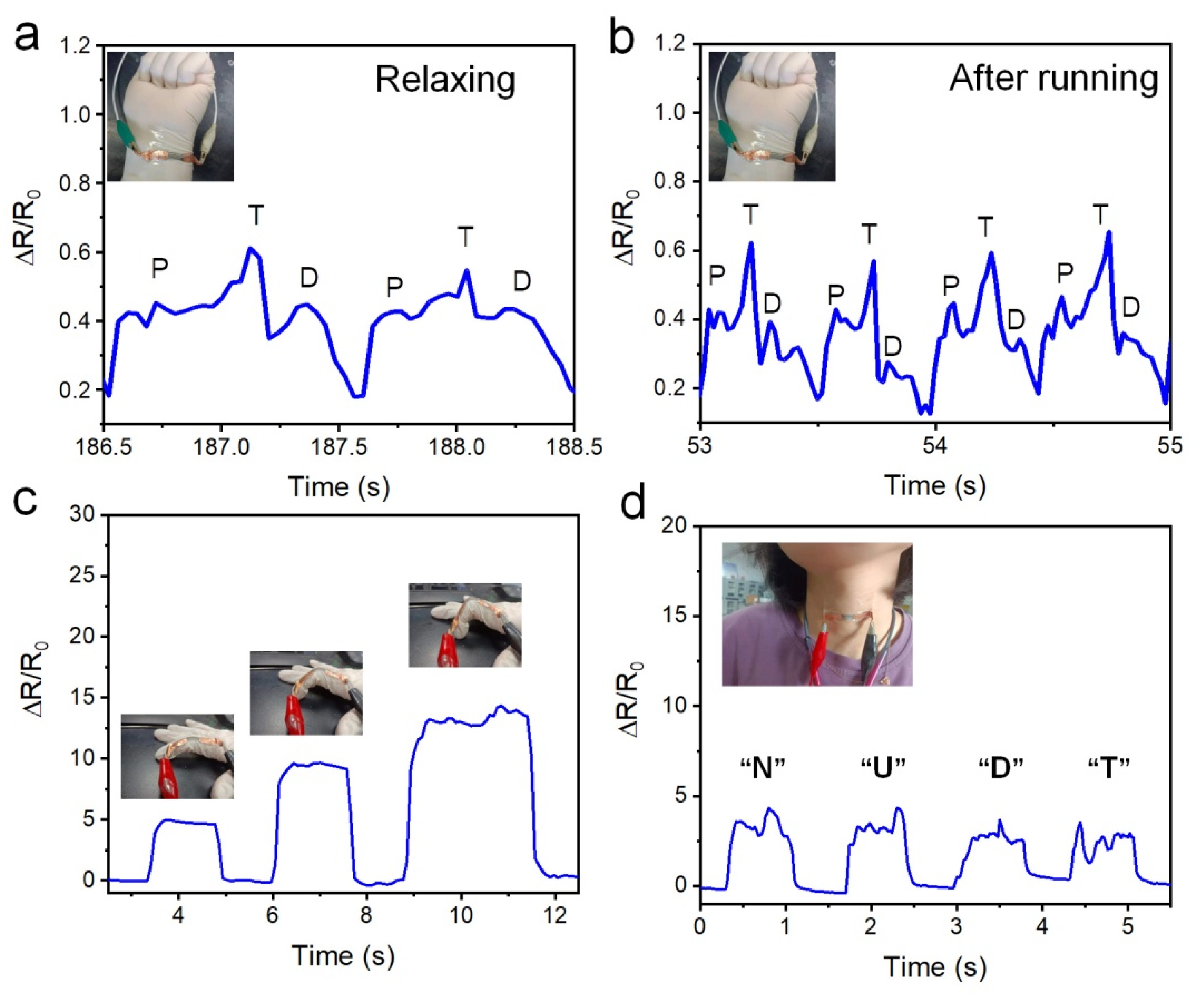
3.4. Wearable Applications of Stripe-Line PWG@R
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chun, S.; Choi, Y.; Park, W. All-graphene strain sensor on soft substrate. Carbon 2017, 116, 753–759. [Google Scholar] [CrossRef]
- Afroze, J.D.; Abden, M.J.; Yuan, Z.; Wang, C.; Wei, L.; Chen, Y.; Tong, L. Core-shell structured graphene aerogels with multifunctional mechanical, thermal and electromechanical properties. Carbon 2020, 162, 365–374. [Google Scholar] [CrossRef]
- Wei, S.; Qiu, X.; An, J.; Chen, Z.; Zhang, X. Highly sensitive, flexible, green synthesized graphene/biomass aerogels for pressure sensing application. Compos. Sci. Technol. 2021, 207, 108730. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, H.; Han, W.; Lin, H.; Li, R.; Zhu, J.; Huang, W. 3D Printed Flexible Strain Sensors: From Printing to Devices and Signals. Adv. Mater. 2021, 33, 2004782. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Qin, W. An integrated all-solid-state screen-printed potentiometric sensor based on a three-dimensional self-assembled graphene aerogel. Microchem. J. 2020, 159, 105453. [Google Scholar] [CrossRef]
- Shen, X.Q.; Li, M.D.; Ma, J.P.; Shen, Q.D. Skin-Inspired Pressure Sensor with MXene/P(VDF-TrFE-CFE) as Active Layer for Wearable Electronics. Nanomaterials 2021, 11, 716. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, J.; Chen, S.; Varley, R.J.; Pan, K. 1D/2D Nanomaterials Synergistic, Compressible, and Response Rapidly 3D Graphene Aerogel for Piezoresistive Sensor. Adv. Funct. Mater. 2020, 30, 2003618. [Google Scholar] [CrossRef]
- Liu, X.; Wei, Y.; Qiu, Y. Advanced Flexible Skin-Like Pressure and Strain Sensors for Human Health Monitoring. Micromachines 2021, 12, 695. [Google Scholar] [CrossRef]
- Ma, Y.; Yue, Y.; Zhang, H.; Cheng, F.; Zhao, W.; Rao, J.; Luo, S.; Wang, J.; Jiang, X.; Liu, Z. 3D Synergistical MXene/Reduced Graphene Oxide Aerogel for a Piezoresistive Sensor. ACS Nano 2018, 12, 3209–3216. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, K.; Yang, Z.; Jiang, S.; Ju, Z.; Li, Y.; Wang, X.; Wang, D.; Jian, M.; Zhang, Y.; et al. Epidermis Microstructure Inspired Graphene Pressure Sensor with Random Distributed Spinosum for High Sensitivity and Large Linearity. ACS Nano 2018, 12, 2346–2354. [Google Scholar] [CrossRef]
- Zhang, B.-X.; Hou, Z.-L.; Yan, W.; Zhao, Q.-L.; Zhan, K.-T. Multi-dimensional flexible reduced graphene oxide/polymer sponges for multiple forms of strain sensors. Carbon 2017, 125, 199–206. [Google Scholar] [CrossRef]
- Zhu, M.; Yue, Y.; Cheng, Y.; Zhang, Y.; Su, J.; Long, F.; Jiang, X.; Ma, Y.; Gao, Y. Hollow MXene Sphere/Reduced Graphene Aerogel Composites for Piezoresistive Sensor with Ultra-High Sensitivity. Adv. Electron. Mater. 2020, 6, 1901064. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, X.; Zhou, Z.; Ren, Y.; Xing, Y. Using Folding Structure to Enhance Measurement Range, Sensitivity of the Flexible Sensors: A Simple, Eco-Friendly, and Effective Method. Adv. Mater. Technol. 2021, 6, 2001216. [Google Scholar] [CrossRef]
- Venkatarao, S.; Akshaya, T.; Vivek, A.; Parikshit, S. Laser-assisted MicroPyramid patterned PDMS encapsulation of 1D tellurium nanowires on cellulose paper for highly sensitive strain sensor and its photodetection studies. Nanotechnology 2021, 32, 455201. [Google Scholar] [CrossRef]
- Song, J.; Tan, Y.; Chu, Z.; Xiao, M.; Li, G.; Jiang, Z.; Wang, J.; Hu, T. Hierarchical Reduced Graphene Oxide Ridges for Stretchable, Wearable, and Washable Strain Sensors. ACS Appl. Mater. Interfaces 2019, 11, 1283–1293. [Google Scholar] [CrossRef]
- Zhao, B.; Cong, H.; Dong, Z. Highly stretchable and sensitive strain sensor based on Ti3C2-coated electrospinning TPU film for human motion detection. Smart Mater. Struct. 2021, 30, 095003. [Google Scholar] [CrossRef]
- Jiang, N.; Li, H.; Hu, D.; Xu, Y.; Hu, Y.; Zhu, Y.; Han, X.; Zhao, G.; Chen, J.; Chang, X.; et al. Stretchable strain and temperature sensor based on fibrous polyurethane film saturated with ionic liquid. Compos. Commun. 2021, 27, 100845. [Google Scholar] [CrossRef]
- Hou, W.; Luan, Z.; Xie, D.; Zhang, X.; Yu, T.; Sui, K. High performance dual strain-temperature sensor based on alginate nanofibril/graphene oxide/polyacrylamide nanocomposite hydrogel. Compos. Commun. 2021, 27, 100837. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Pi, M.; Ran, R. High-strength, highly conductive and woven organic hydrogel fibers for flexible electronics. Chem. Eng. J. 2022, 428, 131172. [Google Scholar] [CrossRef]
- Wang, Y.; Xia, Y.; Xiang, P.; Dai, Y.; Gao, Y.; Xu, H.; Yu, J.; Gao, G.; Chen, K. Protein-assisted freeze-tolerant hydrogel with switchable performance toward customizable flexible sensor. Chem. Eng. J. 2022, 428, 131171. [Google Scholar] [CrossRef]
- Wei, H.; Kong, D.; Li, T.; Xue, Q.; Wang, S.; Cui, D.; Huang, Y.; Wang, L.; Hu, S.; Wang, T.; et al. Solution-Processable Conductive Composite Hydrogels with Multiple Synergetic Networks toward Wearable Pressure/Strain Sensors. ACS Sens. 2021, 6, 2938–2951. [Google Scholar] [CrossRef] [PubMed]
- Yao, D.; Tang, Z.; Zhang, L.; Li, R.; Zhang, Y.; Zeng, H.; Du, D.; Ouyang, J. Gas-permeable and highly sensitive, washable and wearable strain sensors based on graphene/carbon nanotubes hybrids e-textile. Compos. Part A Appl. Sci. Manuf. 2021, 149, 106556. [Google Scholar] [CrossRef]
- Li, K.; Yang, W.; Yi, M.; Shi, Z. Graphene-based pressure sensor and strain sensor for detecting human activities. Smart Mater. Struct. 2021, 30, 085027. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, G.; Wang, F.; Xu, Y.; Wang, C.; Zhu, Y.; Jiang, W. Design of flexible strain sensor with both ultralow detection limit and wide sensing range via the multiple sensing mechanisms. Compos. Sci. Technol. 2021, 213, 108932. [Google Scholar] [CrossRef]
- Wang, Y.; Li, W.; Li, C.; Zhou, B.; Zhou, Y.; Jiang, L.; Wen, S.; Zhou, F. Fabrication of ultra-high working range strain sensor using carboxyl CNTs coated electrospun TPU assisted with dopamine. Appl. Surf. Sci. 2021, 566, 150705. [Google Scholar] [CrossRef]
- Fu, X.; Li, L.; Chen, S.; Xu, H.; Li, J.; Shulga, V.; Han, W. Knitted Ti3C2Tx MXene based fiber strain sensor for human–computer interaction. J. Colloid Interface Sci. 2021, 604, 643–649. [Google Scholar] [CrossRef]
- Cetin, M.S.; Aylin, K.T.H. Flexible electronics from hybrid nanocomposites and their application as piezoresistive strain sensors. Compos. Part B Eng. 2021, 224, 109199. [Google Scholar] [CrossRef]
- Shi, Z.; Li, A.; Zhang, C.; Zhang, Y. Reduced graphene oxide coated polyurethane composite foams as flexible strain sensors for large deformation. Mater. Sci. Eng. B 2021, 272, 115360. [Google Scholar] [CrossRef]
- Li, G.; Chu, Z.; Gong, X.; Xiao, M.; Dong, Q.; Zhao, Z.; Hu, T.; Zhang, Y.; Wang, J.; Tan, Y.; et al. A Wide-Range Linear and Stable Piezoresistive Sensor Based on Methylcellulose-Reinforced, Lamellar, and Wrinkled Graphene Aerogels. Adv. Mater. Technol. 2021, 7, 2101021. [Google Scholar] [CrossRef]
- Momodu, D.; Madito, M.J.; Singh, A.; Sharif, F.; Karan, K.; Trifkovic, M.; Bryant, S.; Roberts, E.P.L. Mixed-acid intercalation for synthesis of a high conductivity electrochemically exfoliated graphene. Carbon 2021, 171, 130–141. [Google Scholar] [CrossRef]
- Dong, Q.; Xiao, M.; Chu, Z.; Li, G.; Zhang, Y. Recent Progress of Toxic Gas Sensors Based on 3D Graphene Frameworks. Sensors 2021, 21, 3386. [Google Scholar] [CrossRef] [PubMed]
- You, R.; Liu, Y.Q.; Hao, Y.L.; Han, D.D.; Zhang, Y.L.; You, Z. Laser Fabrication of Graphene-Based Flexible Electronics. Adv. Mater. 2020, 32, 1901981. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Hu, B.; Song, J.; Chu, Z.; Wu, W. Bioinspired Multiscale Wrinkling Patterns on Curved Substrates: An Overview. Nano-Micro Lett. 2020, 12, 101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jia, J.; Huang, G.; Deng, J.; Pan, K. Skin-inspired flexible and high-sensitivity pressure sensors based on rGO films with continuous-gradient wrinkles. Nanoscale 2019, 11, 4258–4266. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Hu, B.; Chu, Z.; Wu, W. Bioinspired Superhydrophobic Papillae with Tunable Adhesive Force and Ultralarge Liquid Capacity for Microdroplet Manipulation. Adv. Funct. Mater. 2019, 29, 1900266. [Google Scholar] [CrossRef]
- Jia, Y.; Chen, W.; Ye, C.; Yang, R.; Yang, L.; Zhang, Z.; Hu, Q.; Liang, B.; Yang, B.-R.; Tang, Z.; et al. Controllable formation of periodic wrinkles in Marangoni-driven self-assembled graphene film for sensitive strain detection. Sci. China Mater. 2020, 63, 1983–1992. [Google Scholar] [CrossRef]
- Martin-Monier, L.; Piveteau, P.-L.; Sorin, F. Novel insights into the design of stretchable electrical systems. Sci. Adv. 2021, 7, eabf7558. [Google Scholar] [CrossRef]
- Hummers, W.S.; Richard, E. Preparation of Graphitic Oxide. J. Am. Chem. Soc. 1957, 80, 1339–1440. [Google Scholar] [CrossRef]
- Wang, M.; Shao, C.; Zhou, S.; Yang, J.; Xu, F. Super-compressible, fatigue resistant and anisotropic carbon aerogels for piezoresistive sensors. Cellulose 2018, 25, 7329–7340. [Google Scholar] [CrossRef]
- Chen, L.; Yang, R.; Yan, Y.; Fan, C.; Shi, M.; Xu, Y. The Control of Reduction Degree of Graphene Oxide. Prog. Chem. 2018, 30, 1930–1941. [Google Scholar] [CrossRef]
- Han, S.; Duan, Z.; Meng, X.; Zhao, Q.; Zhang, L.; Ouyang, X.; Ma, N.; Wei, H.; Zhang, X. Tunable Fabrication of Conductive Ti3C2Tx MXenes via Inflating a Polyurethane Balloon for Acute Force Sensing. Langmuir 2020, 36, 1298–1304. [Google Scholar] [CrossRef] [PubMed]
- Park, S.-J.; Kim, J.; Chu, M.; Khine, M. Highly Flexible Wrinkled Carbon Nanotube Thin Film Strain Sensor to Monitor Human Movement. Adv. Mater. Technol. 2016, 1, 1600053. [Google Scholar] [CrossRef] [Green Version]
- Nie, B.; Li, X.; Shao, J.; Li, X.; Tian, H.; Wang, D.; Zhang, Q.; Lu, B. Flexible and Transparent Strain Sensors with Embedded Multiwalled-Carbon-Nanotubes Meshes. ACS Appl. Mater. Interfaces 2017, 9, 40681–40689. [Google Scholar] [CrossRef] [PubMed]
- Song, H.; Zhang, J.; Chen, D.; Wang, K.; Niu, S.; Han, Z.; Ren, L. Superfast and High-Sensitivity Printable Strain Sensors with Bioinspired Micron-Scale Cracks. Nanoscale 2017, 9, 1166–1173. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire-Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Cohen, D.J.; Mitra, D.; Peterson, K.; Maharbiz, M.M. A Highly Elastic, Capacitive Strain Gauge Based on Percolating Nanotube Networks. Nano Lett. 2012, 12, 1821–1825. [Google Scholar] [CrossRef]
- Mi, Q.; Wang, Q.; Zang, S.; Mao, G.; Zhang, J.; Ren, X. RGO-Coated Elastic Fibres as Wearable Strain Sensors for Full-Scale Detection of Human Motions. Smart Mater. Struct. 2018, 27, 015014. [Google Scholar] [CrossRef]
- Lee, H.; Glasper, M.J.; Li, X.; Nychka, J.A.; Batcheller, J.; Chung, H.J.; Chen, Y. Preparation of Fabric Strain Sensor Based on Graphene for Human Motion Monitoring. J. Mater. Sci. 2018, 53, 9026–9033. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, Z.; Li, G.; Gong, X.; Zhao, Z.; Tan, Y.; Jiang, Z. Hierarchical Wrinkles for Tunable Strain Sensing Based on Programmable, Anisotropic, and Patterned Graphene Hybrids. Polymers 2022, 14, 2800. https://doi.org/10.3390/polym14142800
Chu Z, Li G, Gong X, Zhao Z, Tan Y, Jiang Z. Hierarchical Wrinkles for Tunable Strain Sensing Based on Programmable, Anisotropic, and Patterned Graphene Hybrids. Polymers. 2022; 14(14):2800. https://doi.org/10.3390/polym14142800
Chicago/Turabian StyleChu, Zengyong, Guochen Li, Xiaofeng Gong, Zhenkai Zhao, Yinlong Tan, and Zhenhua Jiang. 2022. "Hierarchical Wrinkles for Tunable Strain Sensing Based on Programmable, Anisotropic, and Patterned Graphene Hybrids" Polymers 14, no. 14: 2800. https://doi.org/10.3390/polym14142800