
Hydraulically Coupled Dielectric Elastomer Actuators for a Bioinspired Suction Cup

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Experimental
2.1. Design of Prototype
2.2. Fabrication of the Suction Cup
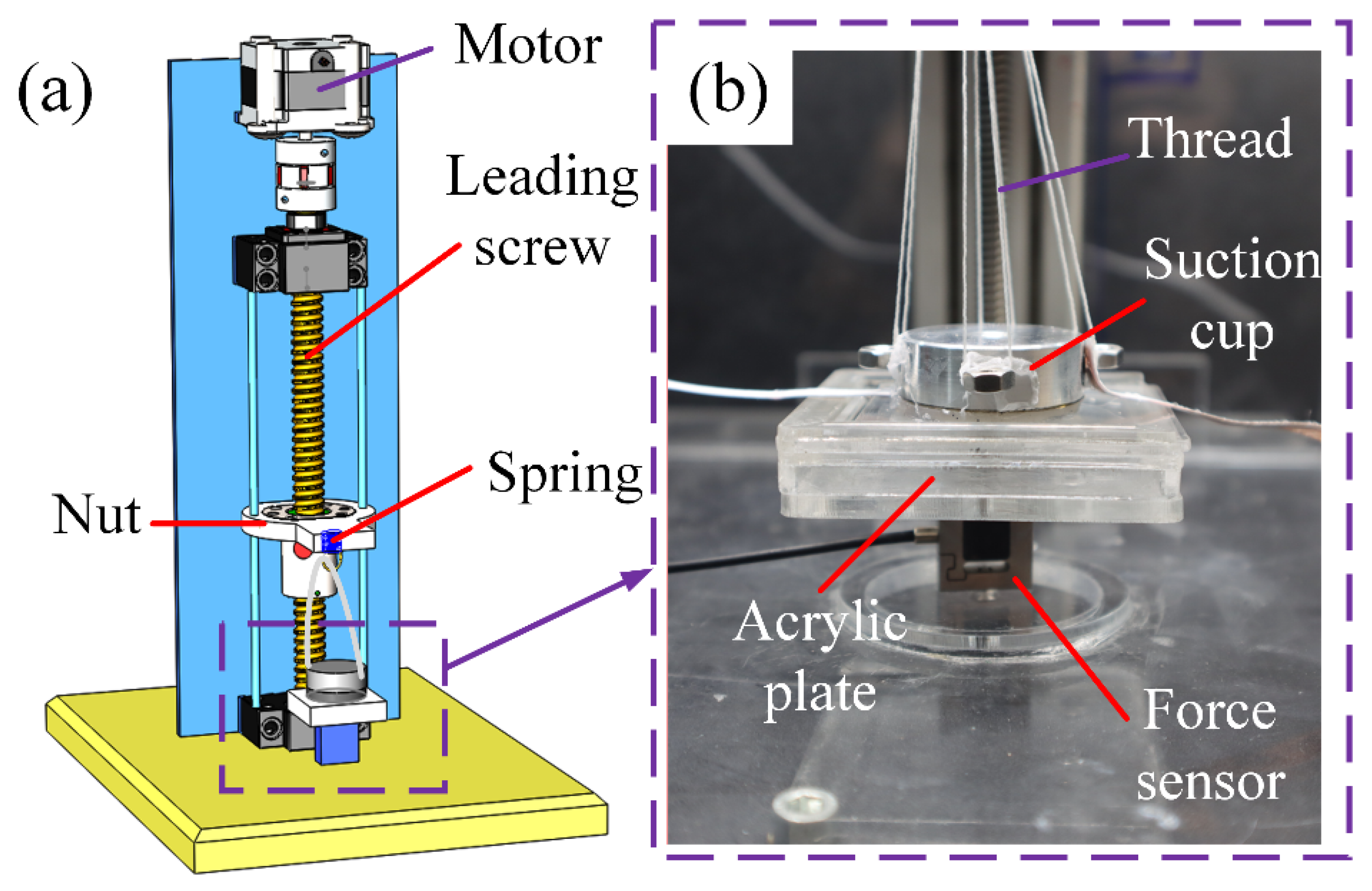
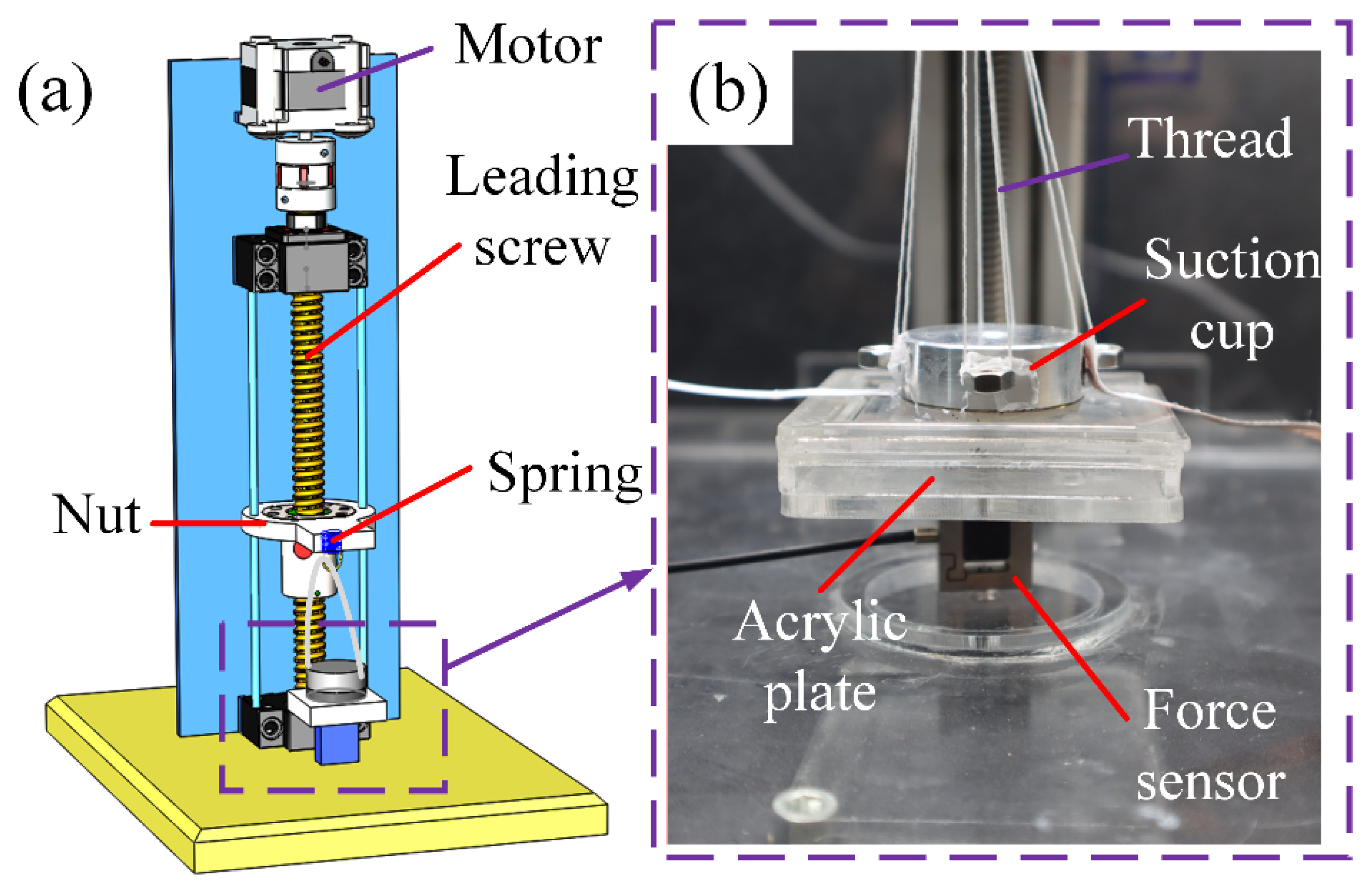
2.3. Experimental Setup and Procedures
- Place a clean acrylic plate on the platform slot, and place the suction cup on it while the other end of suction cup is connected to the threads.
- Connect the force sensor to a laptop by a cable, and turn it on. Set a DC voltage by a signal generator and power the high voltage supply on.
- Turn on the motor, and record the data of the force sensor using the laptop.
- Power off all the devices once the suction cup detaches from the acrylic plate. The maximum value of the recorded curve is the maximum suction force.
3. Results
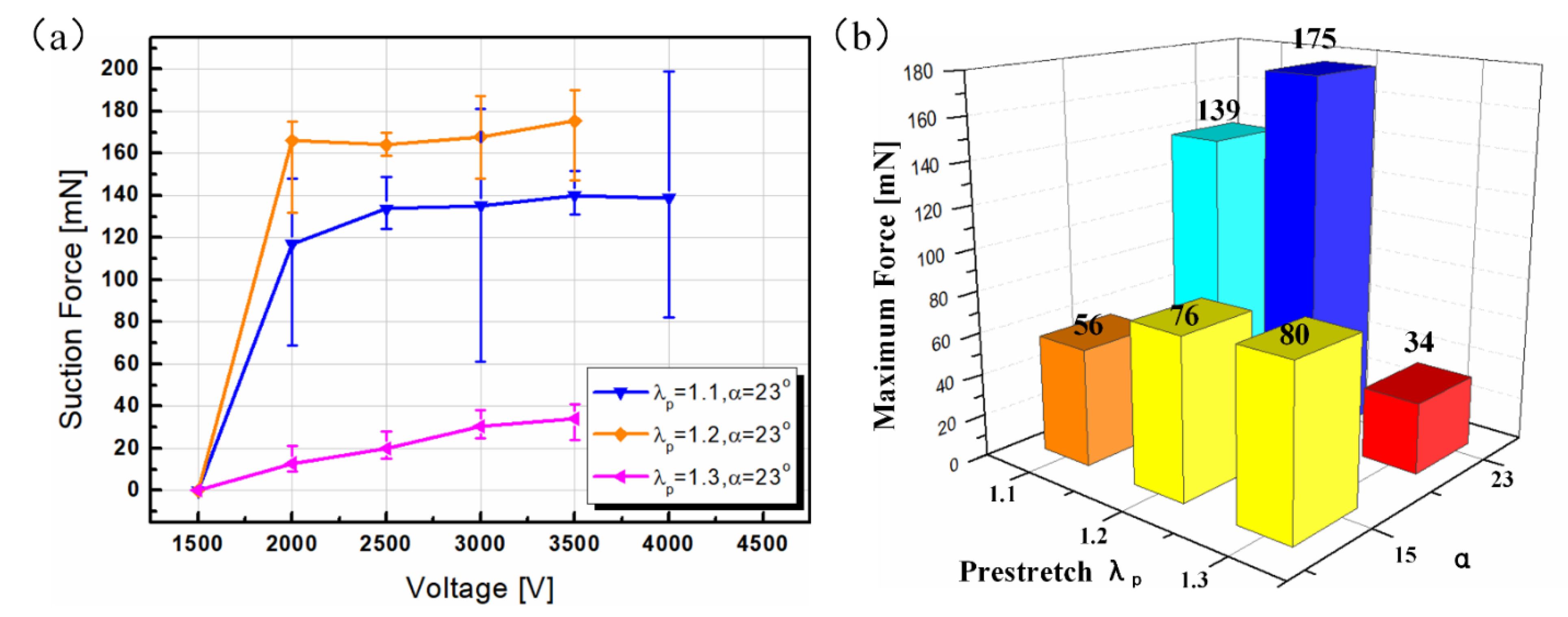
3.1. Effect of Pre-Stretch and Chamber Angle on Suction Force
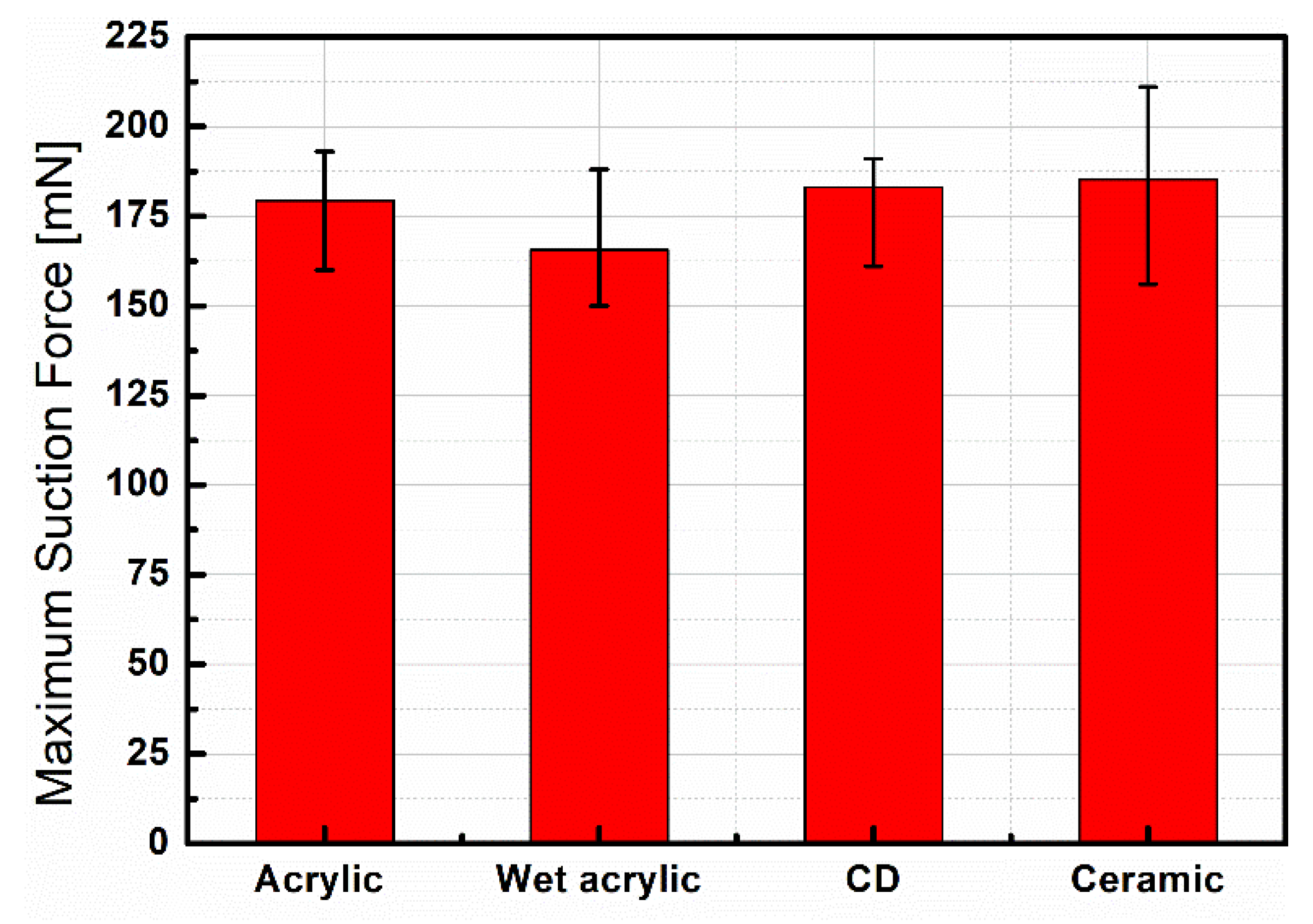
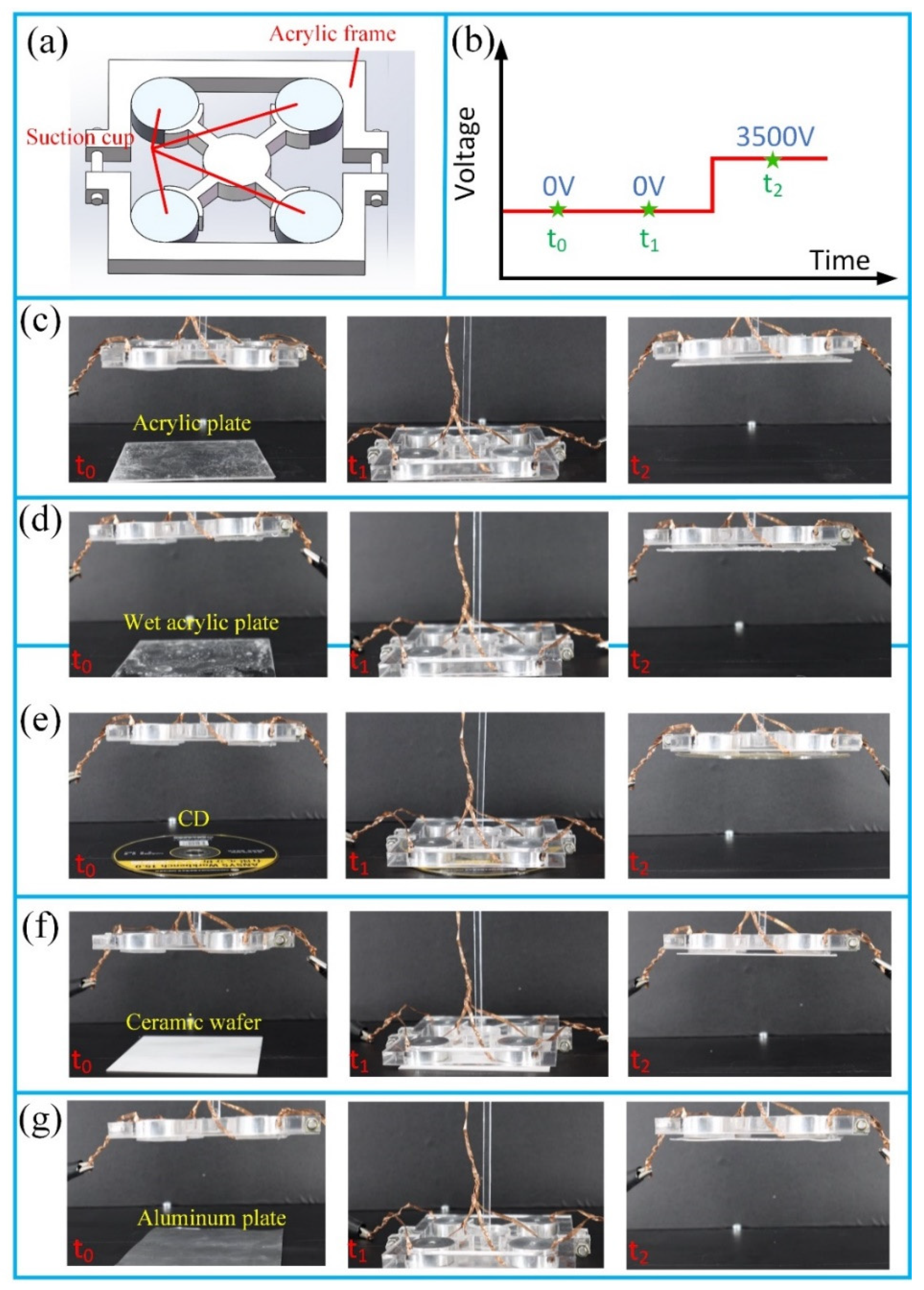
3.2. Characterization of the Suction Cup and Array on Different Types of Surfaces
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bandyopadhyay, P.R.; Hrubes, J.D.; Leinhos, H.A. Biorobotic adhesion in water using suction cups. Bioinspir. Biomim. 2008, 3, 016003. [Google Scholar] [CrossRef] [PubMed]
- Follador, M.; Tramacere, F.; Mazzolai, B. Dielectric elastomer actuators for octopus inspired suction cups. Bioinspir. Biomim. 2014, 9, 046002. [Google Scholar] [CrossRef] [PubMed]
- Tramacere, F.; Follador, M.; Pugno, N.; Mazzolai, B. Octopus-like suction cups: From natural to artificial solutions. Bioinspir. Biomim. 2015, 10, 035004. [Google Scholar] [CrossRef] [PubMed]
- Sholl, N.; Moss, A.; Kier, W.M.; Mohseni, K. A soft end effector inspired by cephalopod suckers and augmented by a dielectric elastomer actuator. Soft Robot. 2019, 6, 356–367. [Google Scholar] [CrossRef]
- Nguyen, T.-V.; Shimoyama, I. Micrometer-Sized Suction Cup Array with Strong Adhesion to Wet Surface. In Proceedings of the 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (TRANSDUCERS & EUROSENSORS XXXIII), Berlin, Germany, 23–27 June 2019; pp. 1643–1646. [Google Scholar]
- Thanh-Vinh, N.; Takahashi, H.; Kan, T.; Noda, K.; Matsumoto, K.; Shimoyama, I. Micro suction cup array for wet/dry adhesion. In Proceedings of the 2011 IEEE 24th International Conference on Micro Electro Mechanical Systems, Cancun, Mexico, 23–27 January 2011; pp. 284–287. [Google Scholar]
- Baik, S.; Park, Y.; Lee, T.-J.; Bhang, S.H.; Pang, C. A wet-tolerant adhesive patch inspired by protuberances in suction cups of octopi. Nature 2017, 546, 396–400. [Google Scholar] [CrossRef]
- Nishita, S.; Onoe, H. Liquid-filled flexible micro suction-controller array for enhanced robotic object manipulation. J. Microelectromech. Syst. 2017, 26, 366–375. [Google Scholar] [CrossRef]
- Mazzolai, B.; Mondini, A.; Tramacere, F.; Riccomi, G.; Sadeghi, A.; Giordano, G.; Del Dottore, E.; Scaccia, M.; Zampato, M.; Carminati, S. Octopus-Inspired Soft Arm with Suction Cups for Enhanced Grasping Tasks in Confined Environments. Adv. Intell. Syst. 2019, 1, 1900041. [Google Scholar] [CrossRef] [Green Version]
- Song, S.; Drotlef, D.-M.; Majidi, C.; Sitti, M. Controllable load sharing for soft adhesive interfaces on three-dimensional surfaces. Proc. Natl. Acad. Sci. USA 2017, 114, E4344–E4353. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Um, D.S.; Lee, Y.; Lim, S.; Kim, H.j.; Ko, H. Octopus-inspired smart adhesive pads for transfer printing of semiconducting nanomembranes. Adv. Mater. 2016, 28, 7457–7465. [Google Scholar] [CrossRef]
- Tsukagoshi, H.; Osada, Y. Soft Hybrid Suction Cup Capable of Sticking to Various Objects and Environments. In Actuators; Multidisciplinary Digital Publishing Institute: Basel, Switzerland, 2021; p. 50. [Google Scholar]
- Tang, Y.; Zhang, Q.; Lin, G.; Yin, J. Switchable adhesion actuator for amphibious climbing soft robot. Soft Robot. 2018, 5, 592–600. [Google Scholar] [CrossRef]
- Okuno, Y.; Shigemune, H.; Kuwajima, Y.; Maeda, S. Stretchable suction cup with electroadhesion. Adv. Mater. Technol. 2019, 4, 1800304. [Google Scholar] [CrossRef] [Green Version]
- Bing-Shan, H.; Li-Wen, W.; Zhuang, F.; Yan-zheng, Z. Bio-inspired miniature suction cups actuated by shape memory alloy. Int. J. Adv. Robot. Syst. 2009, 6, 29. [Google Scholar] [CrossRef]
- Wang, S.; Luo, H.; Linghu, C.; Song, J. Elastic Energy Storage Enabled Magnetically Actuated, Octopus-Inspired Smart Adhesive. Adv. Funct. Mater. 2021, 31, 2009217. [Google Scholar] [CrossRef]
- Koivikko, A.; Drotlef, D.-M.; Sitti, M.; Sariola, V. Magnetically switchable soft suction grippers. Extrem. Mech. Lett. 2021, 44, 101263. [Google Scholar] [CrossRef]
- Pelrine, R. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef]
- Madden, J.D.; Vandesteeg, N.A.; Anquetil, P.A.; Madden, P.G.; Takshi, A.; Pytel, R.Z.; Lafontaine, S.R.; Wieringa, P.A.; Hunter, I.W. Artificial muscle technology: Physical principles and naval prospects. IEEE J. Ocean. Eng. 2004, 29, 706–728. [Google Scholar] [CrossRef]
- Shahinpoor, M.; Kim, K.J. Ionic polymer-metal composites: I. Fundamentals. Smart Mater. Struct. 2001, 10, 819. [Google Scholar] [CrossRef]
- Madden, J.D.W. Conducting Polymer Actuators; Massachusetts Institute of Technology: Cambridge, MA, USA, 2000. [Google Scholar]
- Brochu, P.; Pei, Q. Advances in dielectric elastomers for actuators and artificial muscles. Macromol. Rapid Commun. 2010, 31, 10–36. [Google Scholar] [CrossRef]
- Anderson, I.A.; Gisby, T.A.; McKay, T.G.; O’Brien, B.M.; Calius, E.P. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J. Appl. Phys. 2012, 112, 041101. [Google Scholar] [CrossRef]
- Bauer, S.; Bauer-Gogonea, S.; Graz, I.; Kaltenbrunner, M.; Keplinger, C.; Schwodiauer, R. 25th anniversary article: A soft future: From robots and sensor skin to energy harvesters. Adv. Mater. 2014, 26, 149–162. [Google Scholar] [CrossRef] [Green Version]
- Kofod, G.; Sommer-Larsen, P.; Kornbluh, R.; Pelrine, R. Actuation Response of Polyacrylate Dielectric Elastomers. J. Intell. Mater. Syst. Struct. 2003, 14, 787–793. [Google Scholar] [CrossRef]
- Lochmatter, P.; Kovacs, G.; Ermanni, P. Design and characterization of shell-like actuators based on soft dielectric electroactive polymers. Smart Mater. Struct. 2007, 16, 1415–1422. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Phung, H.; Nguyen, T.D.; Lee, C.; Kim, U.; Lee, D.; Moon, H.; Koo, J.; Nam, J.-d.; Choi, H.R. A small biomimetic quadruped robot driven by multistacked dielectric elastomer actuators. Smart Mater. Struct. 2014, 23, 065005. [Google Scholar] [CrossRef]
- Kaltseis, R.; Keplinger, C.; Koh, S.J.A.; Baumgartner, R.; Goh, Y.F.; Ng, W.H.; Kogler, A.; Tröls, A.; Foo, C.C.; Suo, Z. Natural rubber for sustainable high-power electrical energy generation. RSC Adv. 2014, 4, 27905–27913. [Google Scholar] [CrossRef] [Green Version]
- Kornbluh, R.D.; Pelrine, R.; Prahlad, H.; Wong-Foy, A.; McCoy, B.; Kim, S.; Eckerle, J.; Low, T. Dielectric elastomers: Stretching the capabilities of energy harvesting. MRS Bull. 2012, 37, 246–253. [Google Scholar] [CrossRef]
- Zhu, J.; Stoyanov, H.; Kofod, G.; Suo, Z. Large deformation and electromechanical instability of a dielectric elastomer tube actuator. J. Appl. Phys. 2010, 108, 074113. [Google Scholar] [CrossRef] [Green Version]
- He, T.; Zhao, X.; Suo, Z. Dielectric elastomer membranes undergoing inhomogeneous deformation. J. Appl. Phys. 2009, 106, 083522. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Keplinger, C.; Baumgartner, R.; Bauer, S.; Yang, W.; Suo, Z. Giant voltage-induced deformation in dielectric elastomers near the verge of snap-through instability. J. Mech. Phys. Solids 2013, 61, 611–628. [Google Scholar] [CrossRef]
- Acome, E.; Mitchell, S.K.; Morrissey, T.; Emmett, M.; Benjamin, C.; King, M.; Radakovitz, M.; Keplinger, C. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science 2018, 359, 61–65. [Google Scholar] [CrossRef] [Green Version]
- Kellaris, N.; Venkata, V.G.; Smith, G.M.; Mitchell, S.K.; Keplinger, C. Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Sci. Robot. 2018, 3, eaar3276. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Mitchell, S.K.; Rumley, E.H.; Rothemund, P.; Keplinger, C. High-strain peano-HASEL actuators. Adv. Funct. Mater. 2020, 30, 1908821. [Google Scholar] [CrossRef]
- Leroy, E.; Hinchet, R.; Shea, H. Multimode hydraulically amplified electrostatic actuators for wearable haptics. Adv. Mater. 2020, 32, 2002564. [Google Scholar] [CrossRef] [PubMed]
- Kier, W.M.; Smith, A.M. The structure and adhesive mechanism of octopus suckers. Integr. Comp. Biol. 2002, 42, 1146–1153. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tramacere, F.; Beccai, L.; Kuba, M.; Gozzi, A.; Bifone, A.; Mazzolai, B. The morphology and adhesion mechanism of Octopus vulgaris suckers. PLoS ONE 2013, 8, e65074. [Google Scholar] [CrossRef] [Green Version]
- Rosset, S.; Araromi, O.A.; Schlatter, S.; Shea, H.R. Fabrication process of silicone-based dielectric elastomer actuators. J. Vis. Exp. 2016, e53423. [Google Scholar] [CrossRef] [Green Version]
- Maffli, L.; Rosset, S.; Shea, H. Zipping dielectric elastomer actuators: Characterization, design and modeling. Smart Mater. Struct. 2013, 22, 104013. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Liu, L.; Xu, K.; Dong, Z.; Ding, Y.; Li, Q.; Li, P. Hydraulically Coupled Dielectric Elastomer Actuators for a Bioinspired Suction Cup. Polymers 2021, 13, 3481. https://doi.org/10.3390/polym13203481
Zhang C, Liu L, Xu K, Dong Z, Ding Y, Li Q, Li P. Hydraulically Coupled Dielectric Elastomer Actuators for a Bioinspired Suction Cup. Polymers. 2021; 13(20):3481. https://doi.org/10.3390/polym13203481
Chicago/Turabian StyleZhang, Chi, Lei Liu, Kanghui Xu, Zhonghong Dong, Yuxi Ding, Qi Li, and Pengfei Li. 2021. "Hydraulically Coupled Dielectric Elastomer Actuators for a Bioinspired Suction Cup" Polymers 13, no. 20: 3481. https://doi.org/10.3390/polym13203481
APA StyleZhang, C., Liu, L., Xu, K., Dong, Z., Ding, Y., Li, Q., & Li, P. (2021). Hydraulically Coupled Dielectric Elastomer Actuators for a Bioinspired Suction Cup. Polymers, 13(20), 3481. https://doi.org/10.3390/polym13203481