
Supramolecular Self-Healing Sensor Fiber Composites for Damage Detection in Piezoresistive Electronic Skin for Soft Robots

 ,
,  ,
,  ,
,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
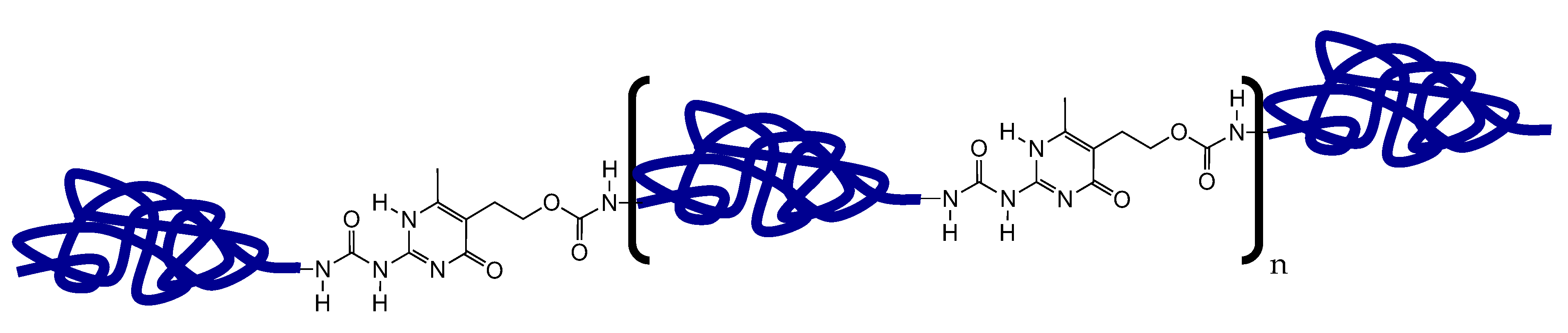
2.1. Self-Healing Compounds
2.1.1. Carbon Black-Loaded UPy-1 and Sensor Fiber Preparation
2.1.2. UPy-2 and Matrix Film Preparation
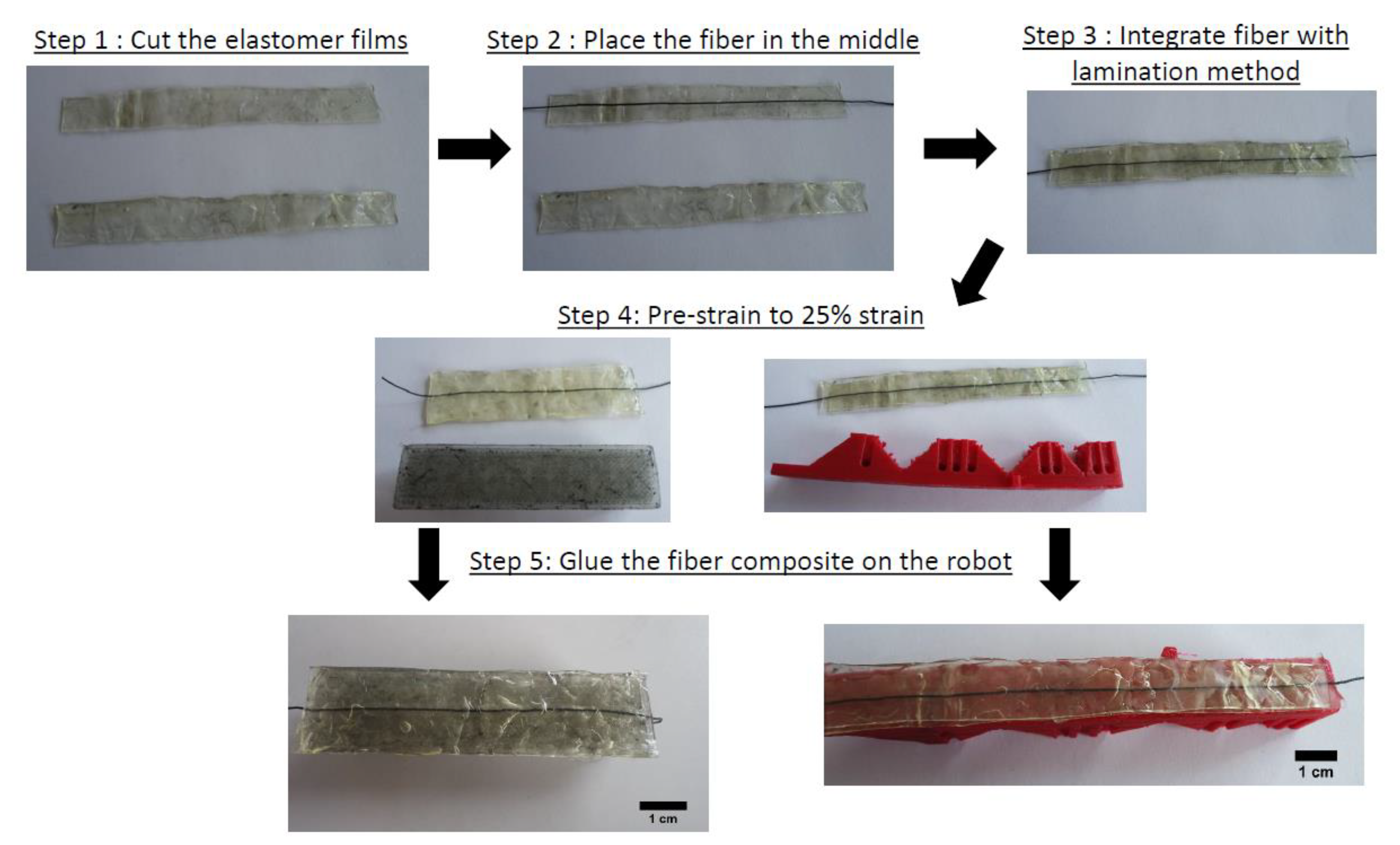
2.2. Fabrication of Fiber Composites Using the Lamination Method
2.3. Characterization of Self-Healing UPy-Elastomers with and without Carbon Black Filler
2.4. Tensile Testing and Characterization of the Mechano-Electrical Behavior
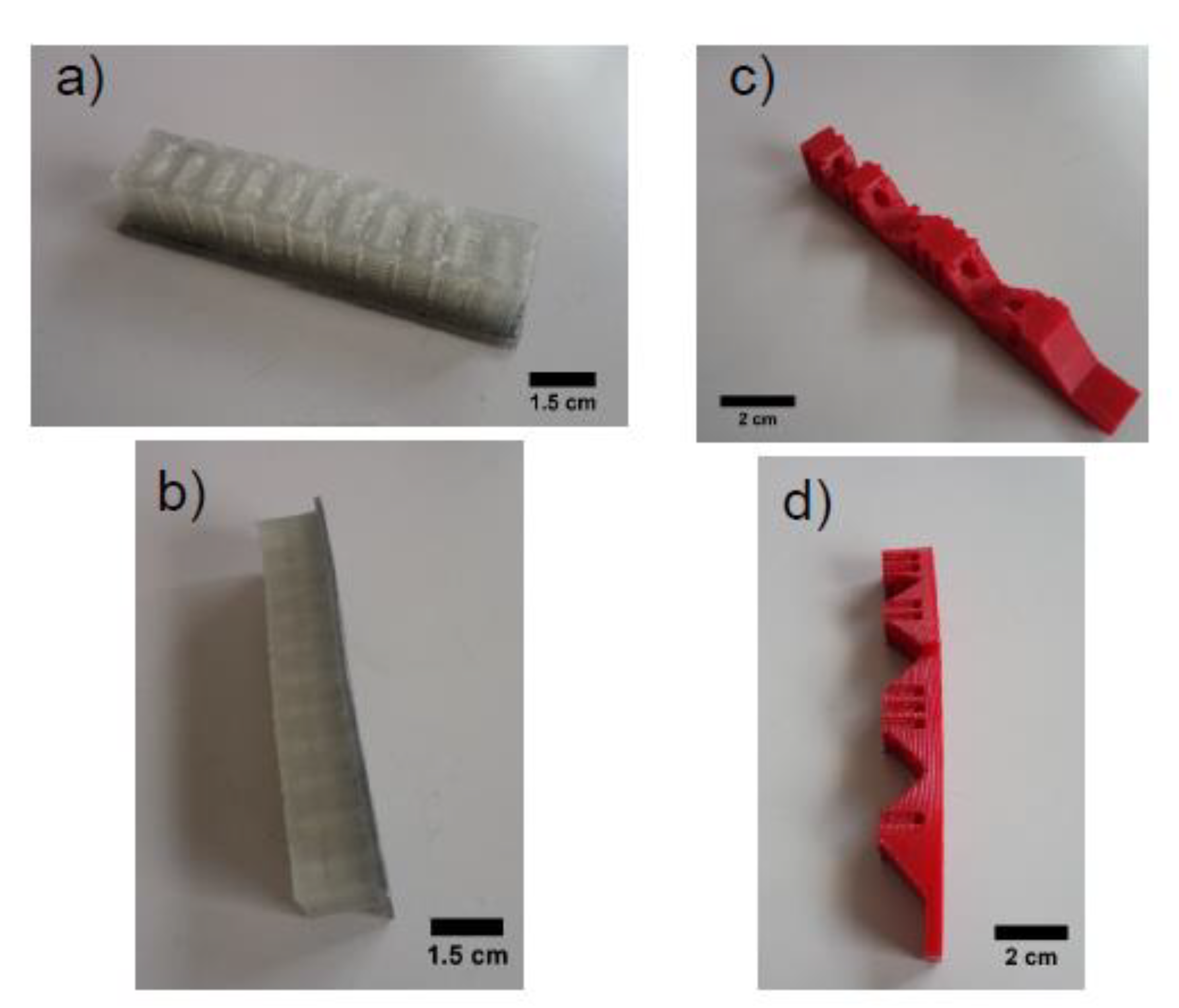
2.5. Fabrication of Soft Robot Modules for Application Tests
2.6. Fabrication and Attachment of the Sensorized Electronic Skin, Based on the Fiber Composites on the Soft Robots
2.7. Self-Healing Protocol and Assessment
3. Results
3.1. Tensile Testing for the UPy-1 and UPy- 2
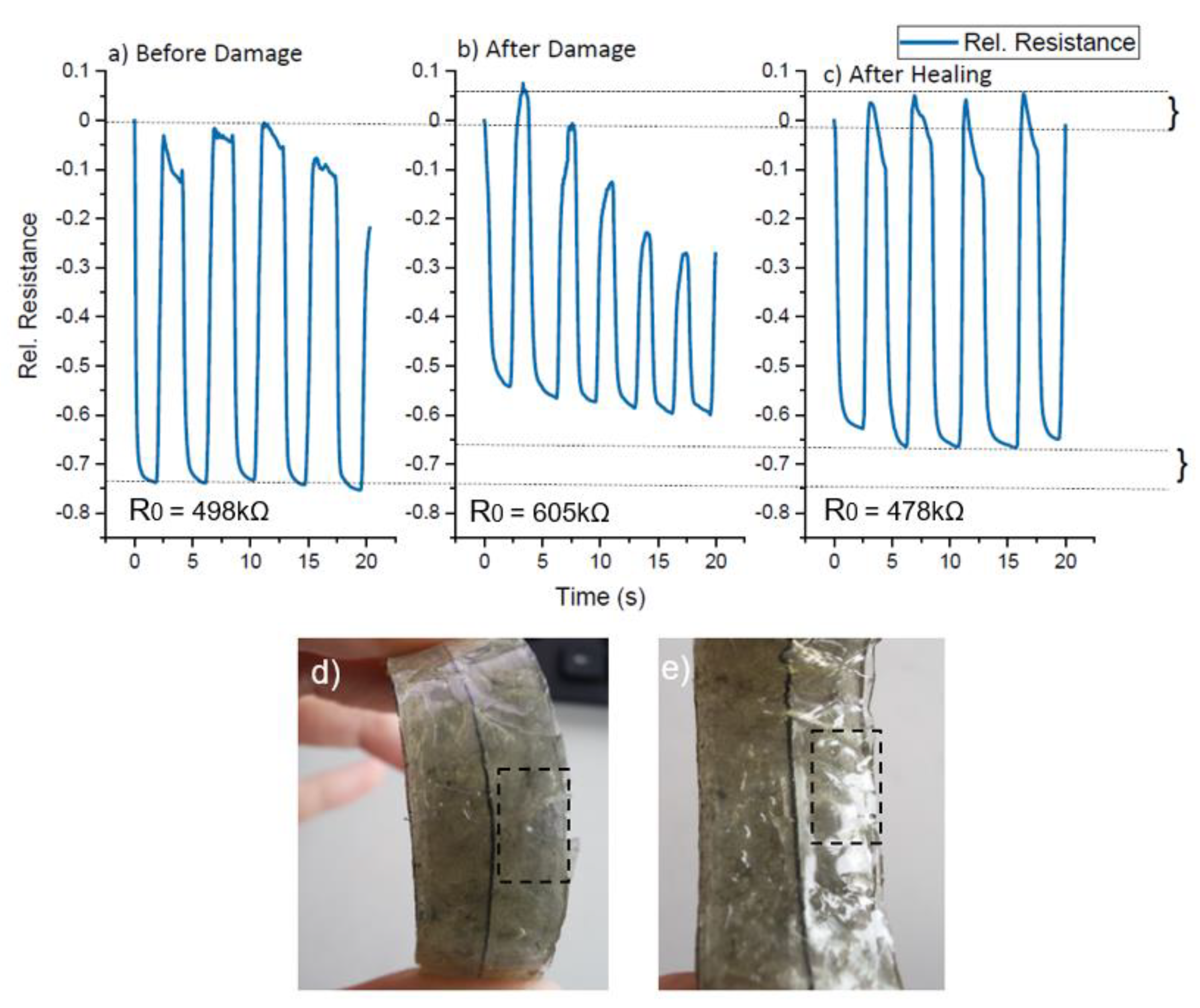
3.2. Characterization of the Self-Healing Sensor Fiber (ShSF)
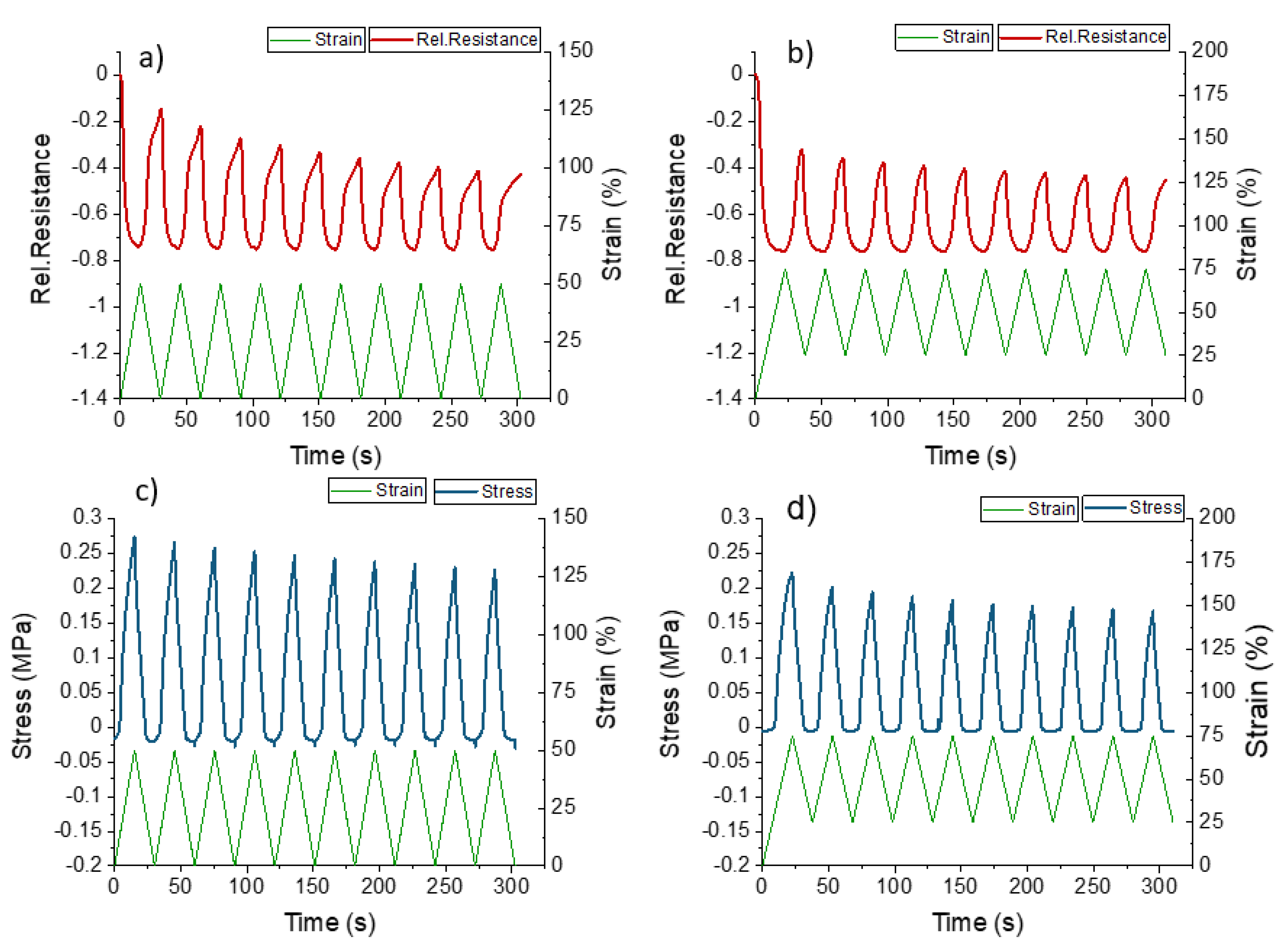
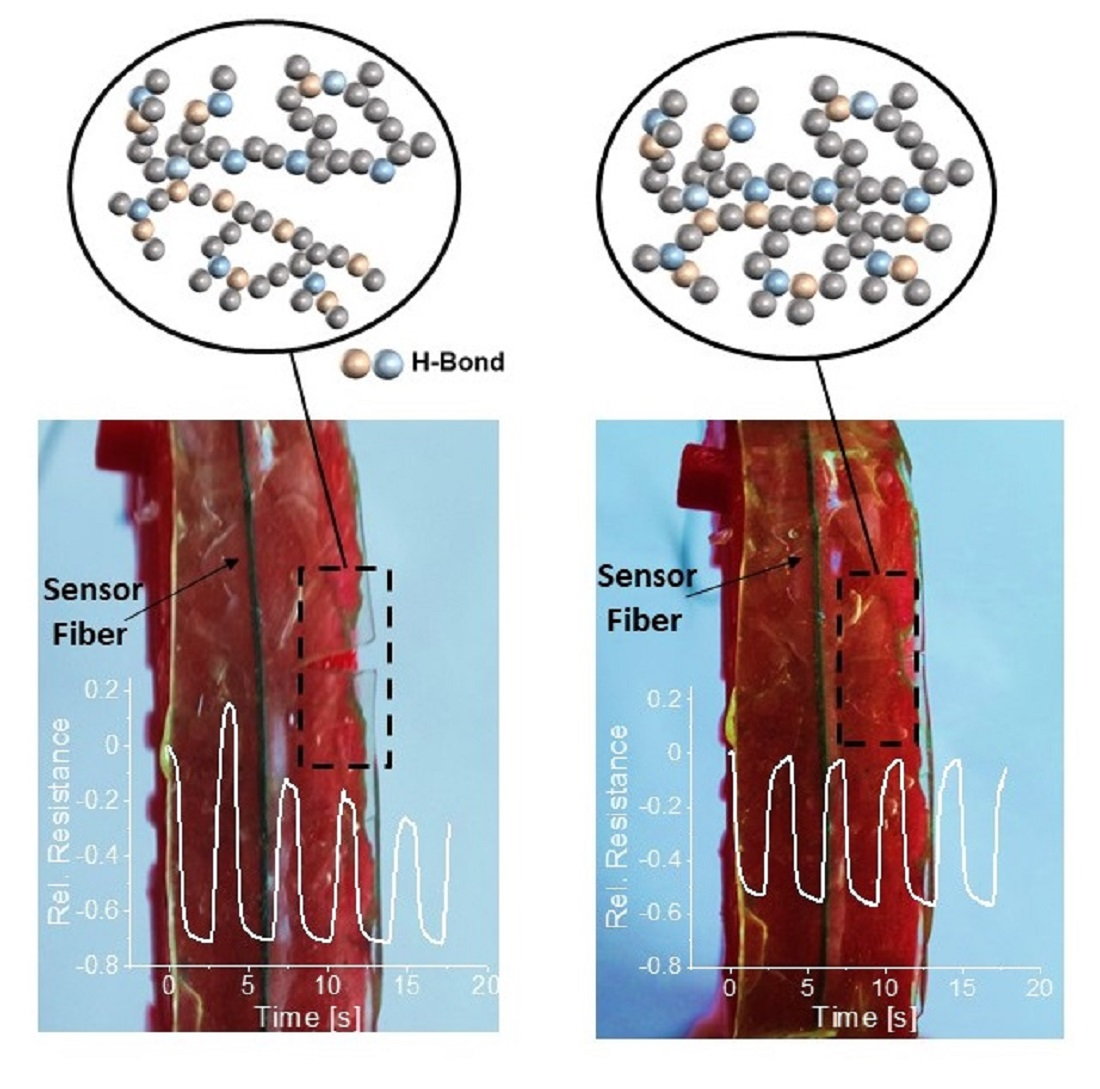
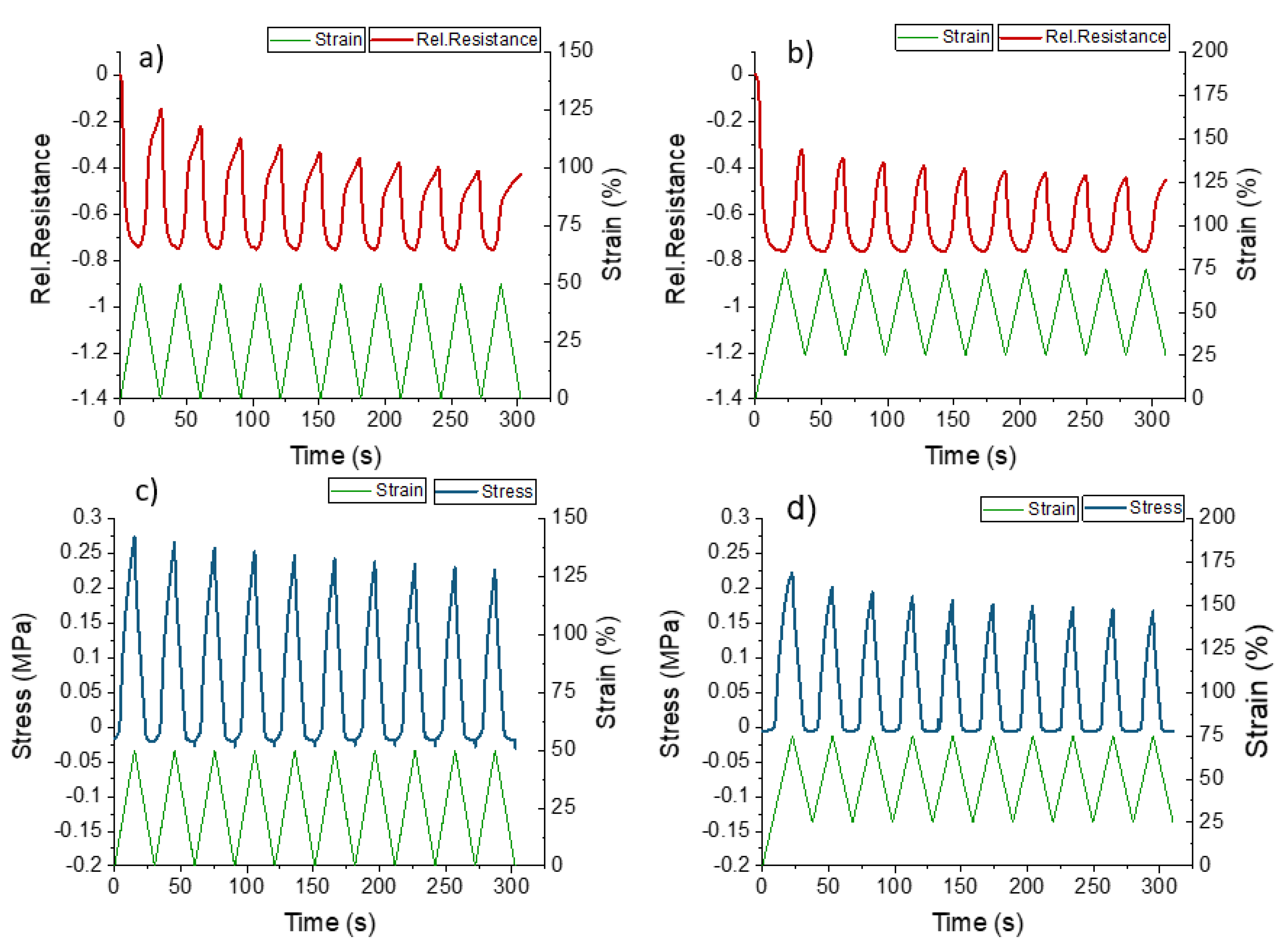
3.3. Characterization of the Self-Healing Sensor Fiber Composites (ShSFC)
3.4. Application: ShSFC-Based Sensorized Skin for Soft Robotic
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kang, J.; Tok, J.B.-H.; Bao, Z. Self-Healing Soft Electronics. Nat. Electron. 2019, 2, 144–150. [Google Scholar] [CrossRef]
- Yang, H.; Leow, W.R.; Chen, X. 3D Printing of Flexible Electronic Devices. Small Methods 2018, 2, 1700259. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Pharr, M.; Salvatore, G.A. Lab-on-Skin: A Review of Flexible and Stretchable Electronics for Wearable Health Monitoring. ACS Nano 2017, 11, 9614–9635. [Google Scholar] [CrossRef]
- Park, S.; Mondal, K.; Treadway, R.M.; Kumar, V.; Ma, S.; Holbery, J.D.; Dickey, M.D. Silicones for Stretchable and Durable Soft Devices: Beyond Sylgard-184. ACS Appl. Mater. Interfaces 2018, 10, 11261–11268. [Google Scholar] [CrossRef] [PubMed]
- Son, D.; Bao, Z. Nanomaterials in Skin-Inspired Electronics: Toward Soft and Robust Skin-like Electronic Nanosystems. ACS Nano 2018, 12, 11731–11739. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Zhu, R. Electronic Skin with Multifunction Sensors Based on Thermosensation. Adv. Mater. 2017, 29, 1606151. [Google Scholar] [CrossRef]
- Melnykowycz, M.; Tschudin, M.; Clemens, F. Piezoresistive Soft Condensed Matter Sensor for Body-Mounted Vital Function Applications. Sensors 2016, 16, 326. [Google Scholar] [CrossRef] [Green Version]
- Markvicka, E.; Tutika, R.; Bartlett, M.D.; Majidi, C. Soft Electronic Skin for Multi-Site Damage Detection and Localization. Adv. Funct. Mater. 2019, 29, 1900160. [Google Scholar] [CrossRef]
- Wang, H.; Yang, Y.; Zhang, M.; Wang, Q.; Xia, K.; Yin, Z.; Wei, Y.; Ji, Y.; Zhang, Y. Electricity-Triggered Self-Healing of Conductive and Thermostable Vitrimer Enabled by Paving Aligned Carbon Nanotubes. ACS Appl. Mater. Interfaces 2020, 12, 14315–14322. [Google Scholar] [CrossRef]
- Yoon, J.H.; Kim, S.-M.; Eom, Y.; Koo, J.M.; Cho, H.-W.; Lee, T.J.; Lee, K.G.; Park, H.J.; Kim, Y.K.; Yoo, H.-J.; et al. Extremely Fast Self-Healable Bio-Based Supramolecular Polymer for Wearable Real-Time Sweat-Monitoring Sensor. ACS Appl. Mater. Interfaces 2019, 11, 46165–46175. [Google Scholar] [CrossRef]
- Huynh, T.-P.; Sonar, P.; Haick, H. Advanced Materials for Use in Soft Self-Healing Devices. Adv. Mater. 2017, 29, 1604973. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, L.F.; Rong, M.Z.; Zhang, M.Q.; Chen, X.D. Repeated Intrinsic Self-Healing of Wider Cracks in Polymer via Dynamic Reversible Covalent Bonding Molecularly Combined with a Two-Way Shape Memory Effect. ACS Appl. Mater. Interfaces 2018, 10, 38538–38546. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Terryn, S.; Brancart, J.; Lefeber, D.; Assche, G.V.; Vanderborght, B. Self-Healing Soft Pneumatic Robots. Sci. Robot. 2017, 2, eaan4268. [Google Scholar] [CrossRef]
- Dahlke, J.; Zechel, S.; Hager, M.D.; Schubert, U.S. How to Design a Self-Healing Polymer: General Concepts of Dynamic Covalent Bonds and Their Application for Intrinsic Healable Materials. Adv. Mater. Interfaces 2018, 5, 1800051. [Google Scholar] [CrossRef]
- Hou, R.; Li, G.; Zhang, Y.; Li, M.; Zhou, G.; Chai, X. Self-Healing Polymers Materials Based on Dynamic Supramolecular Motifs. Prog. Chem. 2019, 31, 690–698. [Google Scholar] [CrossRef]
- Rybtchinski, B. Adaptive Supramolecular Nanomaterials Based on Strong Noncovalent Interactions. ACS Nano 2011, 5, 6791–6818. [Google Scholar] [CrossRef]
- Wu, X.; Wang, J.; Huang, J.; Yang, S. Robust, Stretchable, and Self-Healable Supramolecular Elastomers Synergistically Cross-Linked by Hydrogen Bonds and Coordination Bonds. ACS Appl. Mater. Interfaces 2019, 11, 7387–7396. [Google Scholar] [CrossRef]
- Enke, M.; Doehler, D.; Bode, S.; Binder, W.H.; Hager, M.D.; Schubert, U.S. Intrinsic Self-Healing Polymers Based on Supramolecular Interactions: State of the Art and Future Directions. In Self-Healing Materials; Hager, M.D., VanDerZwaag, S., Schubert, U.S., Eds.; Springer: Berlin, Germany, 2016; Volume 273, pp. 59–112. ISBN 978-3-319-32778-5. [Google Scholar]
- Chen, J.; Li, F.; Luo, Y.; Shi, Y.; Ma, X.; Zhang, M.; Boukhvalov, D.W.; Luo, Z. A Self-Healing Elastomer Based on an Intrinsic Non-Covalent Cross-Linking Mechanism. J. Mater. Chem. A 2019, 7, 15207–15214. [Google Scholar] [CrossRef]
- Terryn, S.; Langenbach, J.; Roels, E.; Brancart, J.; Bakkali-Hassani, C.; Poutrel, Q.-A.; Georgopoulou, A.; George Thuruthel, T.; Safaei, A.; Ferrentino, P.; et al. A Review on Self-Healing Polymers for Soft Robotics. Mater. Today 2021, 47, 187–205. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, D.; Zhang, L.; Li, B.; Sun, C.; Yan, H.; Wu, Z.; Liu, H.; Zhang, J.; Fan, J.; et al. Hydrogen Bonding Derived Self-Healing Polymer Composites Reinforced with Amidation Carbon Fibers. Nanotechnology 2019, 31, 025704. [Google Scholar] [CrossRef]
- Kang, J.; Son, D.; Wang, G.-J.N.; Liu, Y.; Lopez, J.; Kim, Y.; Oh, J.Y.; Katsumata, T.; Mun, J.; Lee, Y.; et al. Tough and Water-Insensitive Self-Healing Elastomer for Robust Electronic Skin. Adv. Mater. 2018, 30, 1706846. [Google Scholar] [CrossRef]
- Liu, X.; Lu, C.; Wu, X.; Zhang, X. Self-Healing Strain Sensors Based on Nanostructured Supramolecular Conductive Elastomers. J. Mater. Chem. A 2017, 5, 9824–9832. [Google Scholar] [CrossRef]
- Wu, T.; Chen, B. Autonomous Self-Healing Multiwalled Carbon Nanotube Nanocomposites with Piezoresistive Effect. RSC Adv. 2017, 7, 20422–20429. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Liu, L.; Pan, C.; Li, D. Review of Recent Achievements in Self-Healing Conductive Materials and Their Applications. J. Mater. Sci. 2018, 53, 27–46. [Google Scholar] [CrossRef]
- Yang, W.; Song, J.; Wu, X.; Wang, X.; Liu, W.; Qiu, L.; Hao, W. High-Efficiency Self-Healing Conductive Composites from HPAMAM and CNTs. J. Mater. Chem. A 2015, 3, 12154–12158. [Google Scholar] [CrossRef]
- Guo, K.; Zhang, D.-L.; Zhang, X.-M.; Zhang, J.; Ding, L.-S.; Li, B.-J.; Zhang, S. Conductive Elastomers with Autonomic Self-Healing Properties. Angew. Chem. Int. Ed. 2015, 54, 12127–12133. [Google Scholar] [CrossRef]
- Chen, Y.; Kushner, A.M.; Williams, G.A.; Guan, Z. Multiphase Design of Autonomic Self-Healing Thermoplastic Elastomers. Nat. Chem. 2012, 4, 467–472. [Google Scholar] [CrossRef]
- Yan, Q.; Zhao, L.; Cheng, Q.; Zhang, T.; Jiang, B.; Song, Y.; Huang, Y. Self-Healing Polysiloxane Elastomer Based on Integration of Covalent and Reversible Networks. Ind. Eng. Chem. Res. 2019, 58, 21504–21512. [Google Scholar] [CrossRef]
- Cao, J.; Lu, C.; Zhuang, J.; Liu, M.; Zhang, X.; Yu, Y.; Tao, Q. Multiple Hydrogen Bonding Enables the Self-Healing of Sensors for Human–Machine Interactions. Angew. Chem. Int. Ed. 2017, 56, 8795–8800. [Google Scholar] [CrossRef]
- Georgopoulou, A.; Clemens, F. Piezoresistive Elastomer-Based Composite Strain Sensors and Their Applications. ACS Appl. Electron. Mater. 2020, 2, 1826–1842. [Google Scholar] [CrossRef]
- Tee, B.C.-K.; Wang, C.; Allen, R.; Bao, Z. An Electrically and Mechanically Self-Healing Composite with Pressure- and Flexion-Sensitive Properties for Electronic Skin Applications. Nat. Nanotechnol. 2012, 7, 825–832. [Google Scholar] [CrossRef] [PubMed]
- Utrera-Barrios, S.; Hernández Santana, M.; Verdejo, R.; López-Manchado, M.A. Design of Rubber Composites with Autonomous Self-Healing Capability. ACS Omega 2020, 5, 1902–1910. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.A.; Sartore, L.; Bignotti, F.; Di Landro, L. Autonomic Self-Healing in Epoxidized Natural Rubber. ACS Appl. Mater. Interfaces 2013, 5, 1494–1502. [Google Scholar] [CrossRef]
- Thostenson, E.T.; Chou, T.-W. Carbon Nanotube Networks: Sensing of Distributed Strain and Damage for Life Prediction and Self Healing. Adv. Mater. 2006, 18, 2837–2841. [Google Scholar] [CrossRef]
- Chung, D.D.L. Self-Monitoring Structural Materials. Mater. Sci. Eng. R: Rep. 1998, 22, 57–78. [Google Scholar] [CrossRef]
- Coverley, P.T.; Staszewski, W.J. Impact Damage Location in Composite Structures Using Optimized Sensor Triangulation Procedure. Smart Mater. Struct. 2003, 12, 795–803. [Google Scholar] [CrossRef]
- Hong, Y.; Su, M. Multifunctional Self-Healing and Self-Reporting Polymer Composite with Integrated Conductive Microwire Networks. ACS Appl. Mater. Interfaces 2012, 4, 3759–3764. [Google Scholar] [CrossRef] [PubMed]
- Pu, W.; Fu, D.; Wang, Z.; Gan, X.; Lu, X.; Yang, L.; Xia, H. Realizing Crack Diagnosing and Self-Healing by Electricity with a Dynamic Crosslinked Flexible Polyurethane Composite. Adv. Sci. 2018, 5, 1800101. [Google Scholar] [CrossRef]
- Söntjens, S.H.M.; Renken, R.A.E.; van Gemert, G.M.L.; Engels, T.A.P.; Bosman, A.W.; Janssen, H.M.; Govaert, L.E.; Baaijens, F.P.T. Thermoplastic Elastomers Based on Strong and Well-Defined Hydrogen-Bonding Interactions. Macromolecules 2008, 41, 5703–5708. [Google Scholar] [CrossRef]
- Georgopoulou, A.; Michel, S.; Vanderborght, B.; Clemens, F. Piezoresistive Sensor Fiber Composites Based on Silicone Elastomers for the Monitoring of the Position of a Robot Arm. Sens. Actuators A: Phys. 2020, 318, 112433. [Google Scholar] [CrossRef]
- Georgopoulou, A.; Michel, S.; Clemens, F. Sensorized Robotic Skin Based on Piezoresistive Sensor Fiber Composites Produced with Injection Molding of Liquid Silicone. Polymers 2021, 13, 1226. [Google Scholar] [CrossRef] [PubMed]
- Mattmann, C.; Clemens, F.; Troester, G. Sensor for Measuring Strain in Textile. Sensors 2008, 8, 3719–3732. [Google Scholar] [CrossRef]
- Georgopoulou, A.; Kummerlöwe, C.; Clemens, F. Effect of the Elastomer Matrix on Thermoplastic Elastomer-Based Strain Sensor Fiber Composites. Sensors 2020, 20, 2399. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hatzikiriakos, S.G.; Migler, K.B. Polymer Processing Additives for Melt Fracture Control. In Applied Polymer Rheology; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2011; pp. 29–58. ISBN 978-1-118-14061-1. [Google Scholar]
- Stan, F.; Stanciu, N.V.; Fetecau, C. Melt Rheological Properties of Ethylene-Vinyl Acetate/Multi-Walled Carbon Nanotube Composites. Compos. Part B: Eng. 2017, 110, 20–31. [Google Scholar] [CrossRef]
- Design Soft Robot. Available online: https://softroboticstoolkit.com/book/pneunets-design (accessed on 14 January 2021).
- Georgopoulou, A.; Egloff, L.; Vanderborght, B.; Clemens, F. A Sensorized Soft Pneumatic Actuator Fabricated with Extrusion-Based Additive Manufacturing. Actuators 2021, 10, 102. [Google Scholar] [CrossRef]
- Flandin, L.; Hiltner, A.; Baer, E. Interrelationships between Electrical and Mechanical Properties of a Carbon Black-Filled Ethylene-Octene Elastomer. Polymer 2001, 42, 827–838. [Google Scholar] [CrossRef]
- Culha, U.; Nurzaman, S.G.; Clemens, F.; Iida, F. SVAS(3): Strain Vector Aided Sensorization of Soft Structures. Sensors 2014, 14, 12748–12770. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Georgopoulou, A.; Vanderborght, B.; Clemens, F. Multi-Material 3D Printing of Thermoplastic Elastomers for Development of Soft Robotic Structures with Integrated Sensor Elements. In Industrializing Additive Manufacturing; Meboldt, M., Klahn, C., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 67–81. [Google Scholar]
- Jinno, S.; Kitora, S.; Toki, H.; Abe, M. Mechanism of Common-Mode Noise Generation in Multi-Conductor Transmission Lines. Sci. Rep. 2019, 9, 15036. [Google Scholar] [CrossRef] [Green Version]
- Kitora, S.; Abe, M.; Toki, H. Electromagnetic Noise in Electric Circuits: Ringing and Resonance Phenomena in the Common Mode. AIP Adv. 2014, 4, 117119. [Google Scholar] [CrossRef]
- Feldman, K.E.; Kade, M.J.; de Greef, T.F.A.; Meijer, E.W.; Kramer, E.J.; Hawker, C.J. Polymers with Multiple Hydrogen-Bonded End Groups and Their Blends. Macromolecules 2008, 41, 4694–4700. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elastomer | Young’s Modulus (MPa) | Ultimate Tensile Strength (MPa) | Strain at the Point of Fracture (%) | |||
|---|---|---|---|---|---|---|
| Before Damage | 4 h Healing (RT) | Before Damage | 4 h Healing (RT) | Before Damage | 4 h Healing (RT) | |
| UPy-1 | 0.6 | 0.7 | 1.2 | 0.9 | 1200 | 710 |
| UPy-1 30% CB | 9.5 | 13 | 2.2 | 1.6 | 70 | 26 |
| UPy-2 | 3.3 | 3.3 | 8.3 | 8.3 | 900 | 900 |
| Range of Strains (%) | 0–50 | 50–100 |
|---|---|---|
| Drift (%) | 110 | 2 |
| Strain at which the slope changes from positive to negative (%) | 46 | No change |
| Strain at which buckling occurs (%) | 6 | No buckling |
| Range of Strains (%) | 0–50 | 25–75 |
|---|---|---|
| Drift (%) | 63 | 22 |
| Buckling at strains (%) | 24 | 49 |
| Initial Resistance (kΩ) | 511 ± 4 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Georgopoulou, A.; Bosman, A.W.; Brancart, J.; Vanderborght, B.; Clemens, F. Supramolecular Self-Healing Sensor Fiber Composites for Damage Detection in Piezoresistive Electronic Skin for Soft Robots. Polymers 2021, 13, 2983. https://doi.org/10.3390/polym13172983
Georgopoulou A, Bosman AW, Brancart J, Vanderborght B, Clemens F. Supramolecular Self-Healing Sensor Fiber Composites for Damage Detection in Piezoresistive Electronic Skin for Soft Robots. Polymers. 2021; 13(17):2983. https://doi.org/10.3390/polym13172983
Chicago/Turabian StyleGeorgopoulou, Antonia, Anton W. Bosman, Joost Brancart, Bram Vanderborght, and Frank Clemens. 2021. "Supramolecular Self-Healing Sensor Fiber Composites for Damage Detection in Piezoresistive Electronic Skin for Soft Robots" Polymers 13, no. 17: 2983. https://doi.org/10.3390/polym13172983
APA StyleGeorgopoulou, A., Bosman, A. W., Brancart, J., Vanderborght, B., & Clemens, F. (2021). Supramolecular Self-Healing Sensor Fiber Composites for Damage Detection in Piezoresistive Electronic Skin for Soft Robots. Polymers, 13(17), 2983. https://doi.org/10.3390/polym13172983