Modeling the Full Time-Dependent Phenomenology of Filled Rubber for Use in Anti-Vibration Design




Abstract
1. Introduction
2. Theory
2.1. Free Energy Density
2.2. Stress Softening
2.3. Viscoelasticity
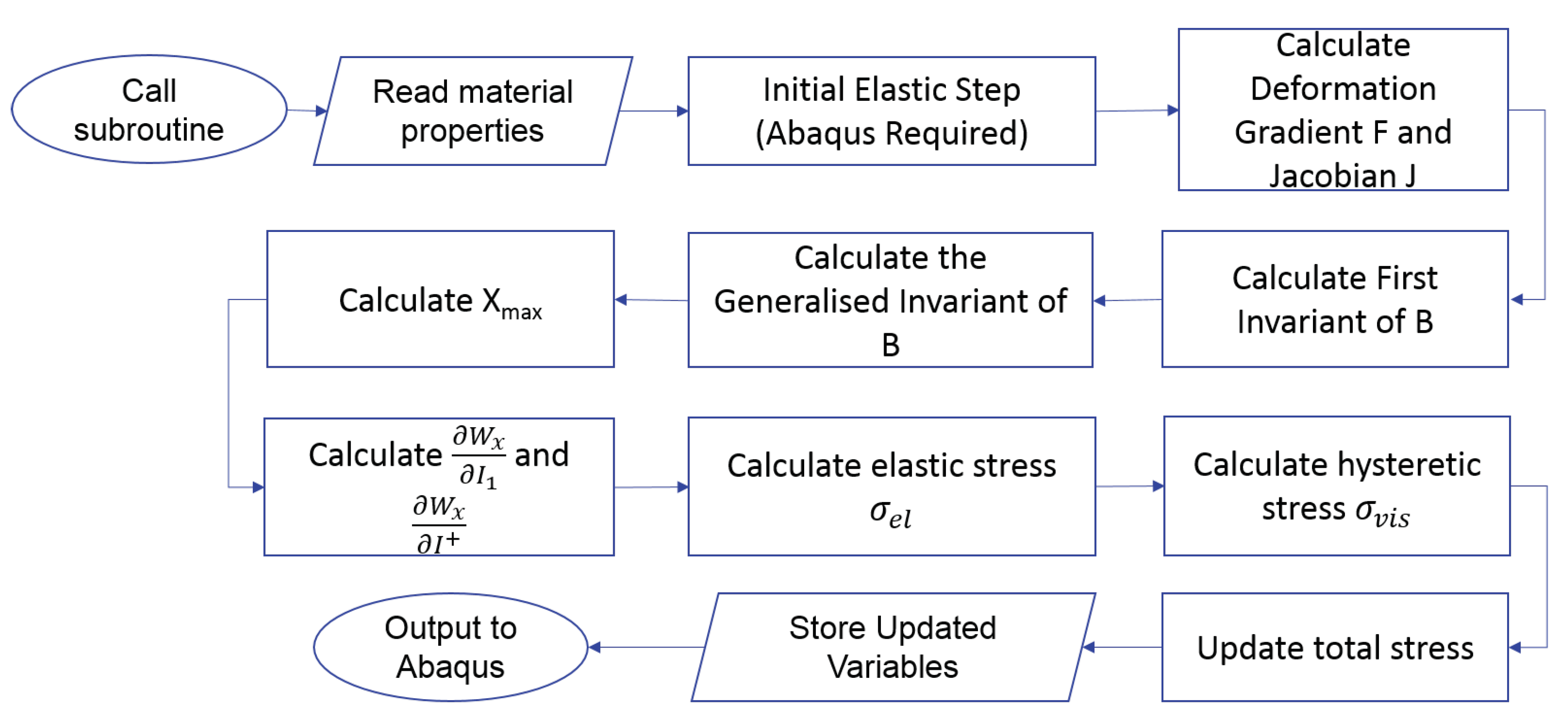
2.4. Implementation
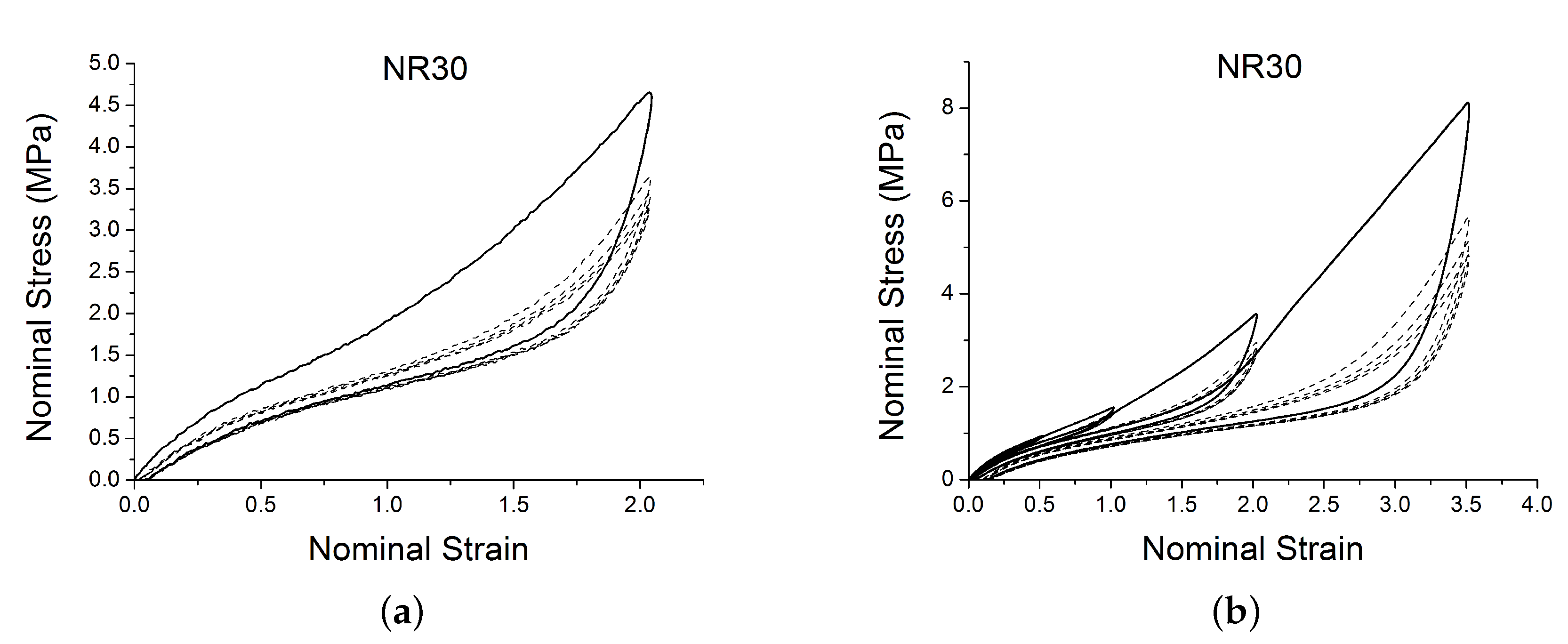
3. Materials and Experiments
4. Results
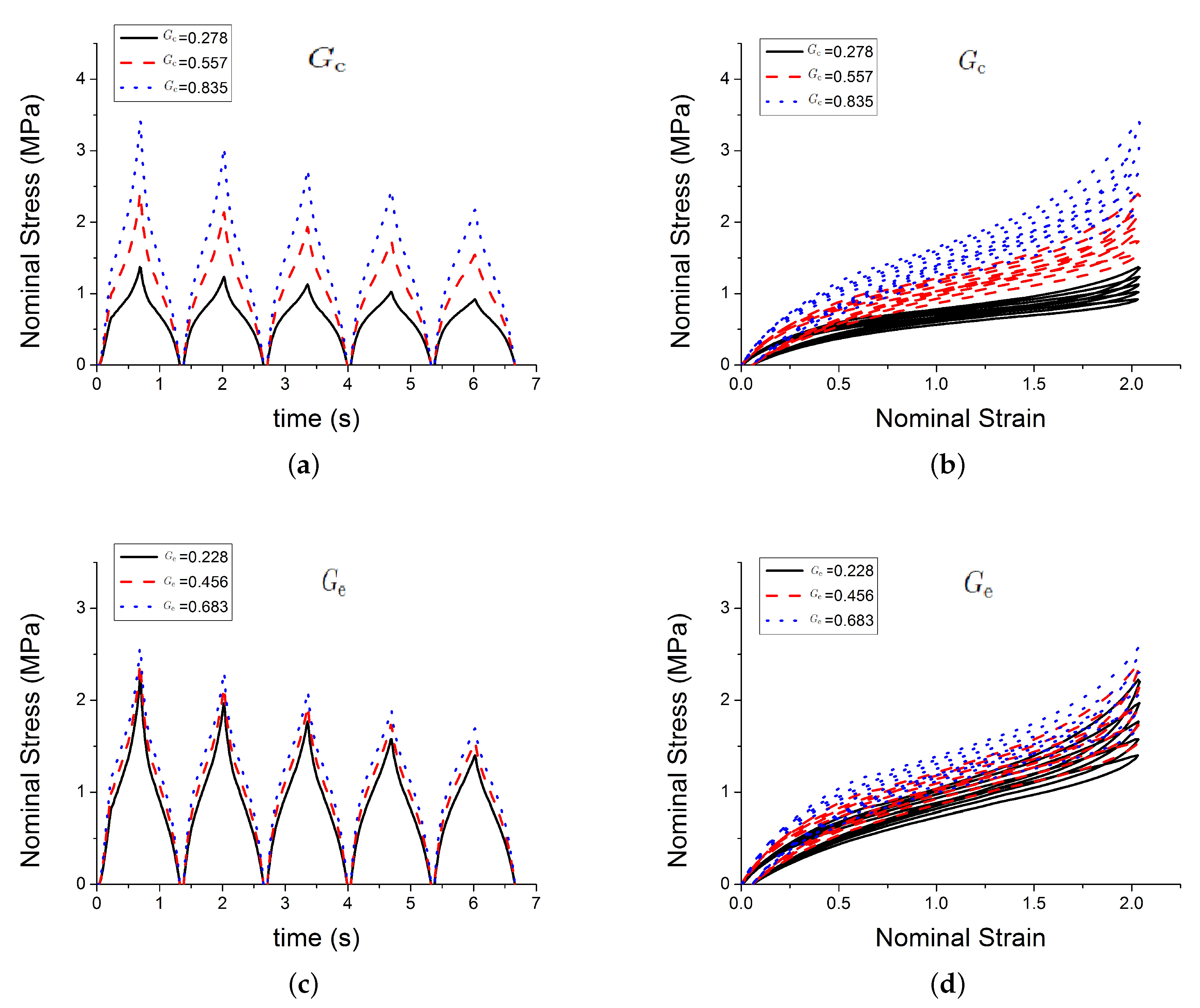
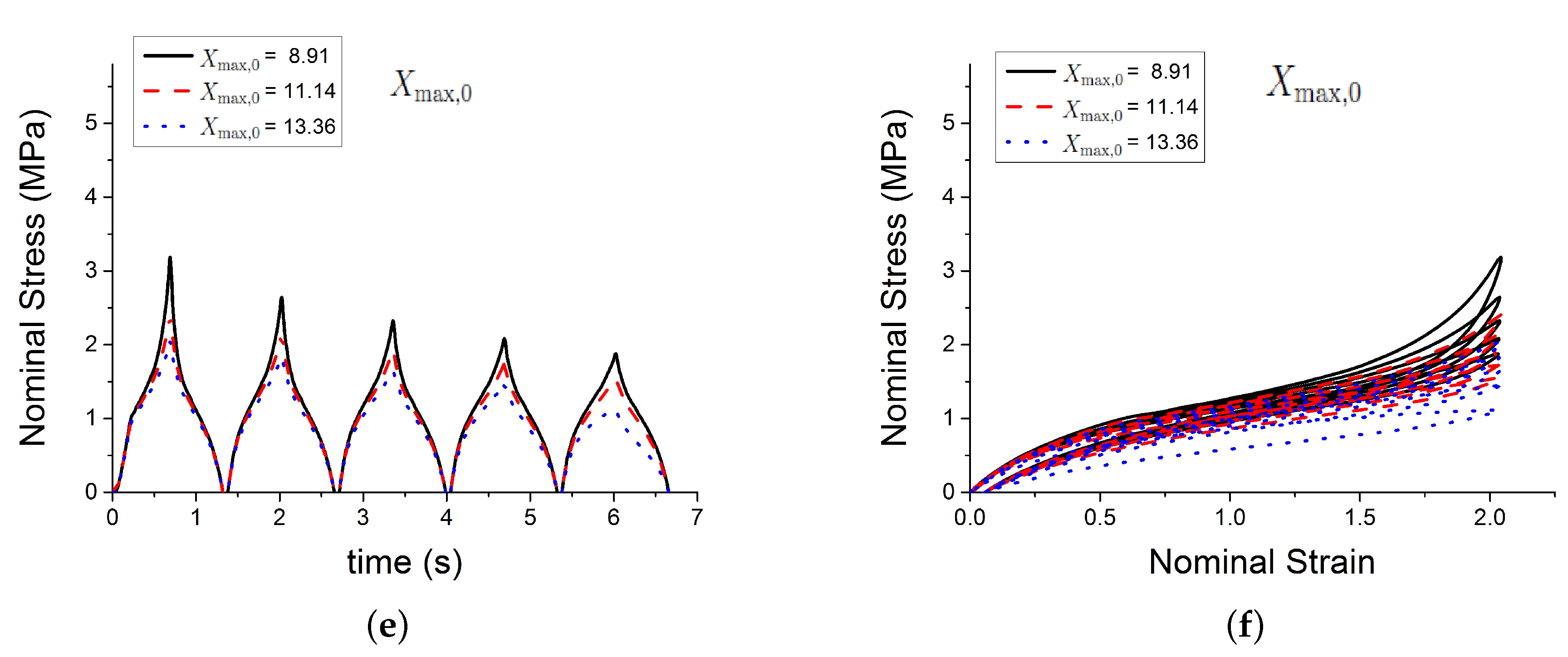
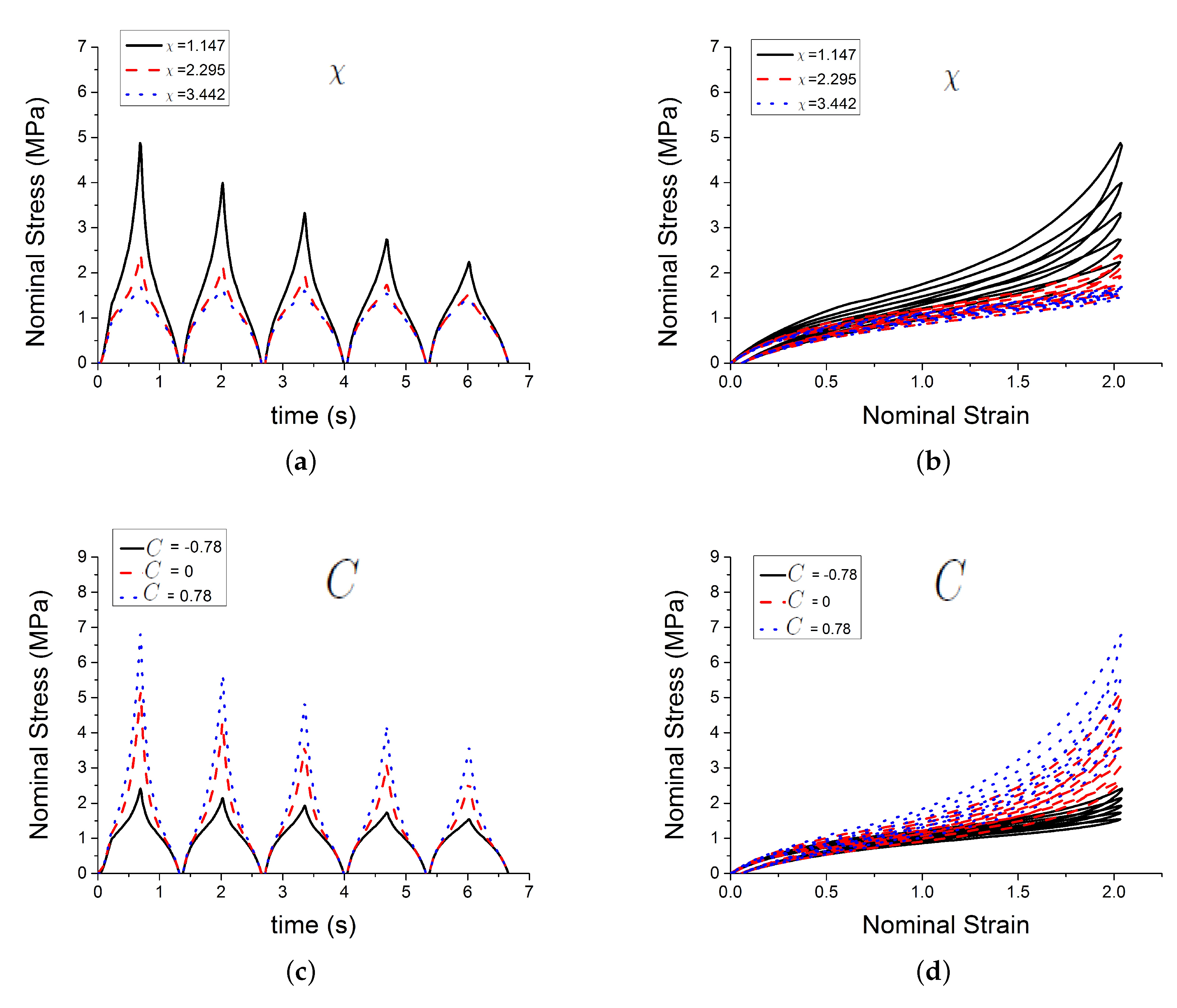
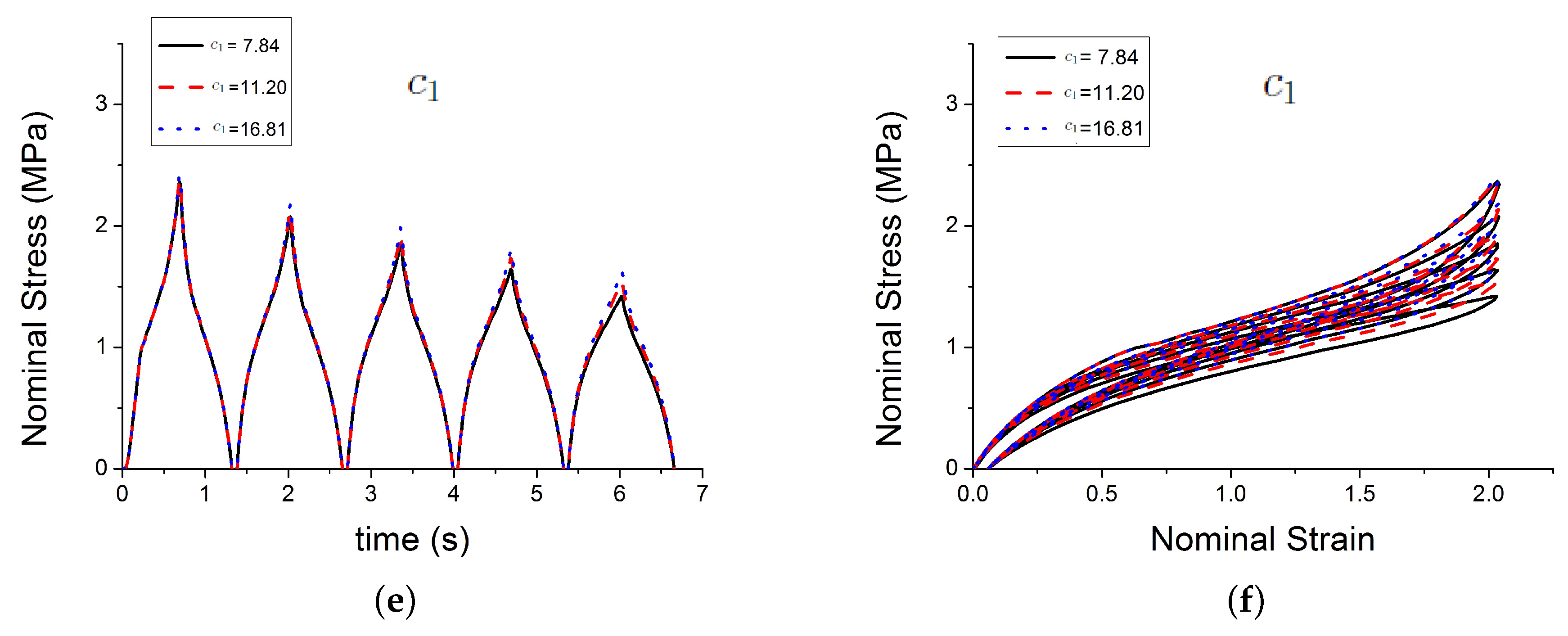
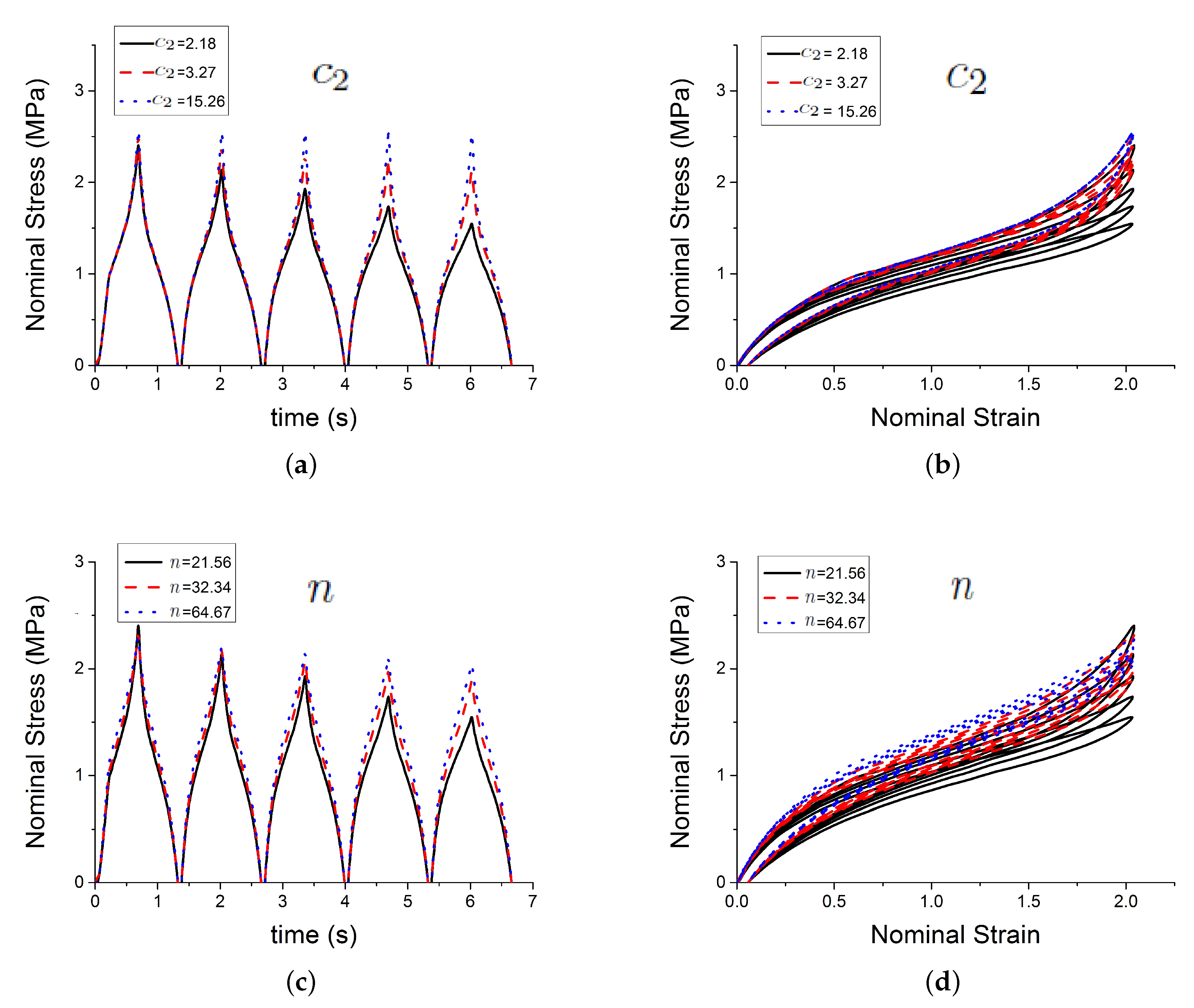
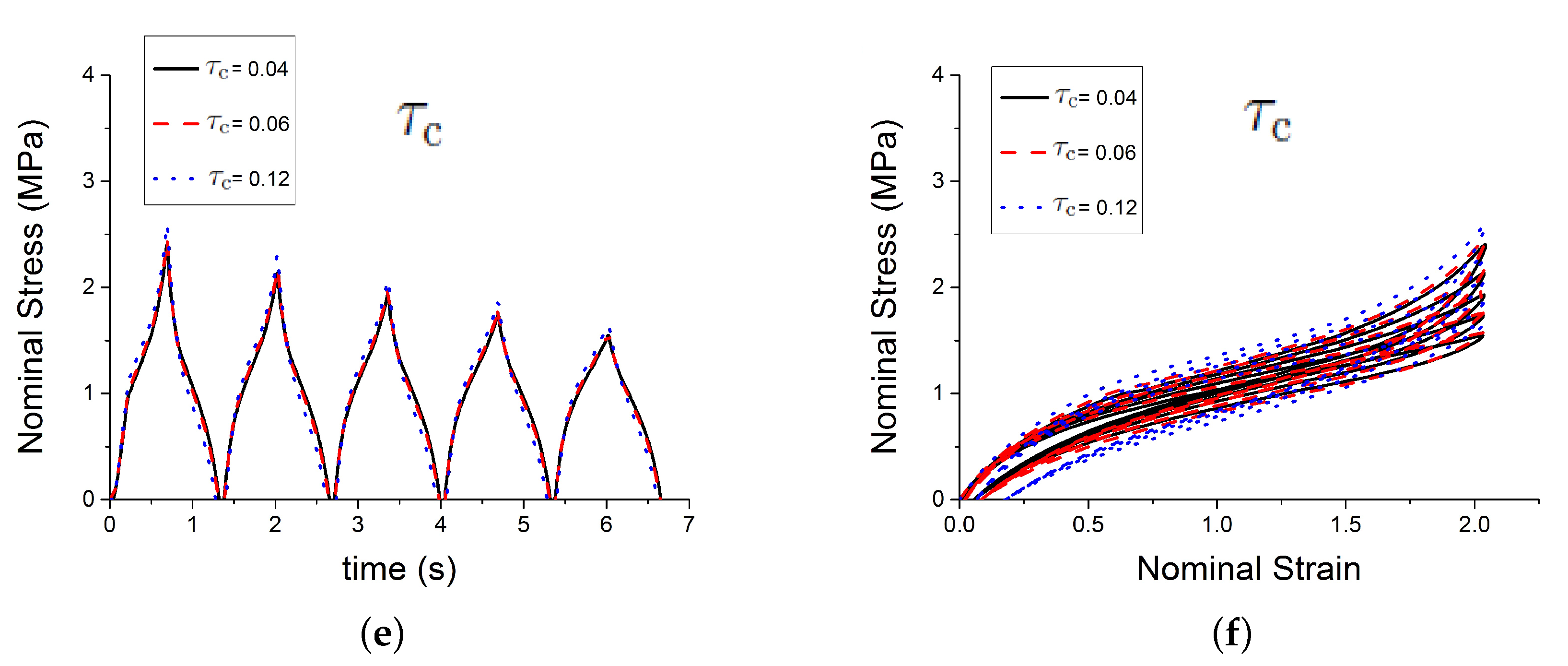
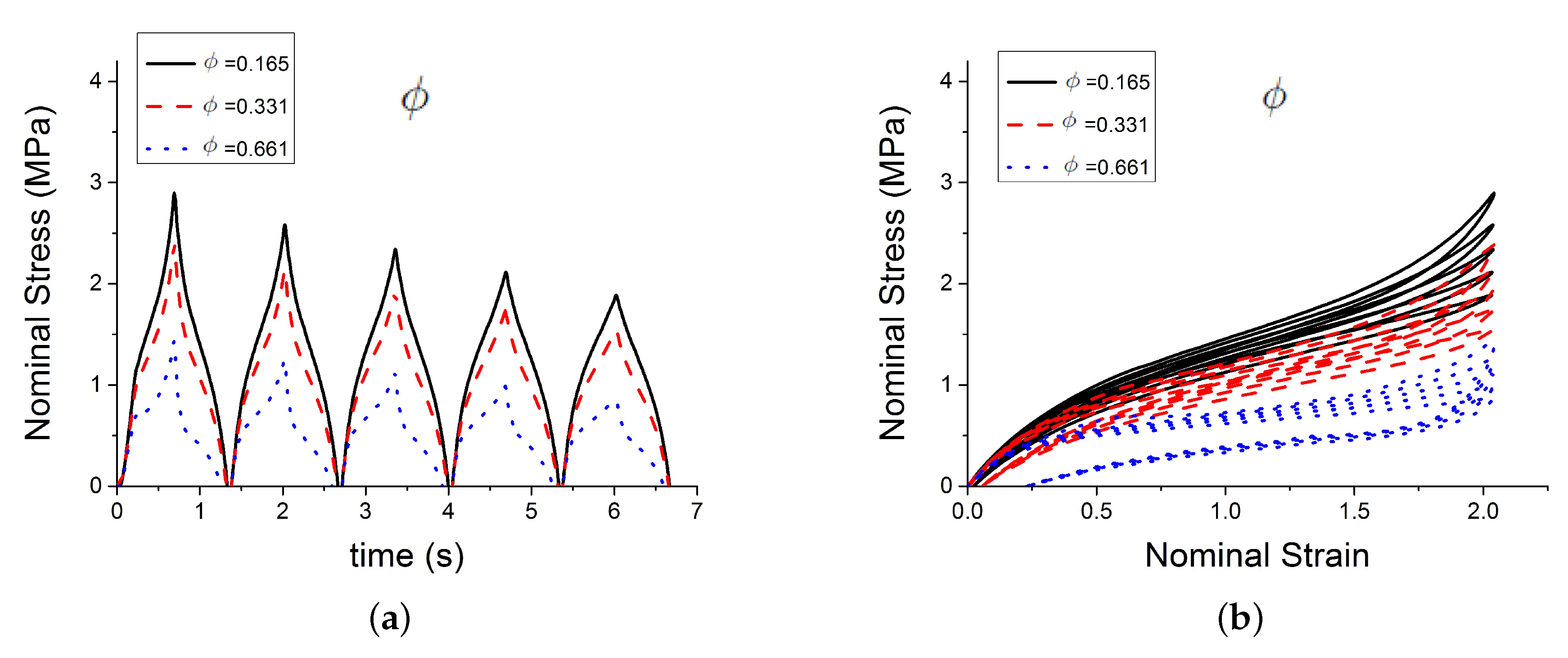
4.1. Sensitivity Analysis
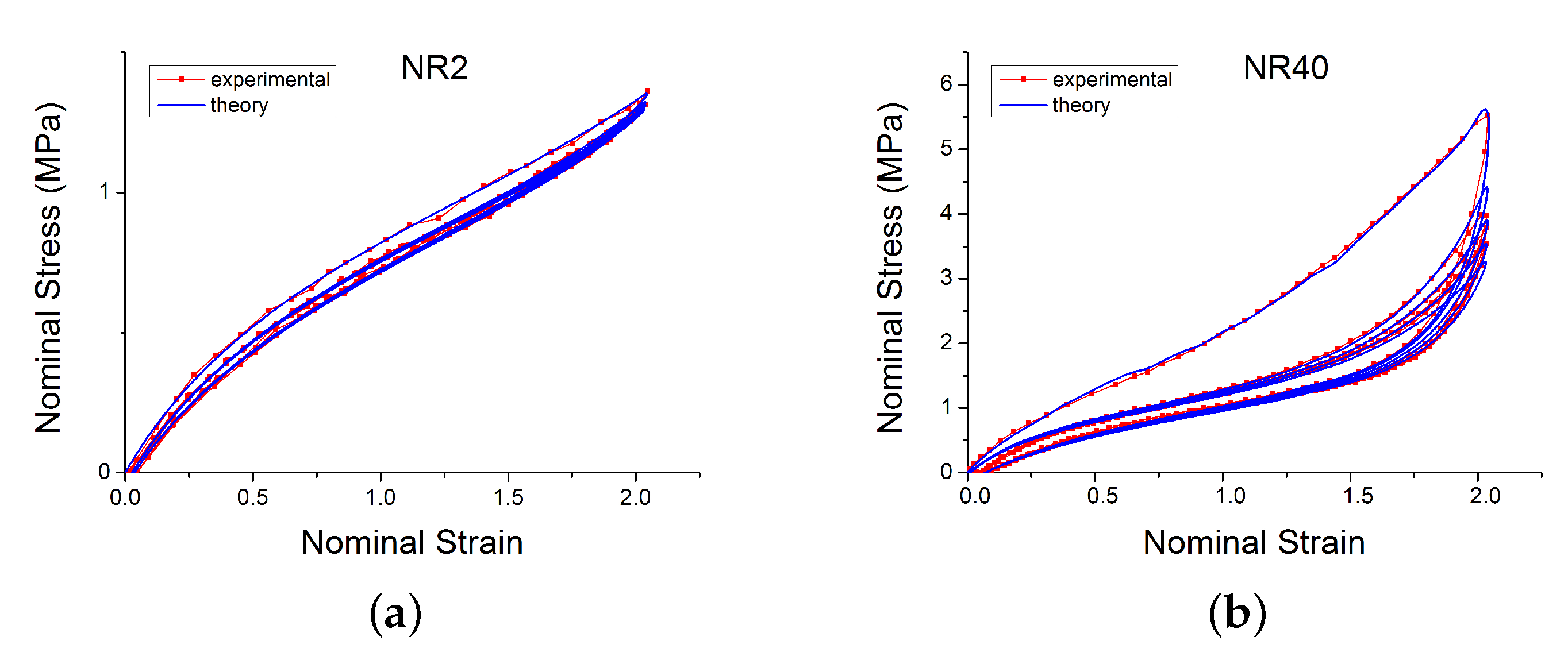
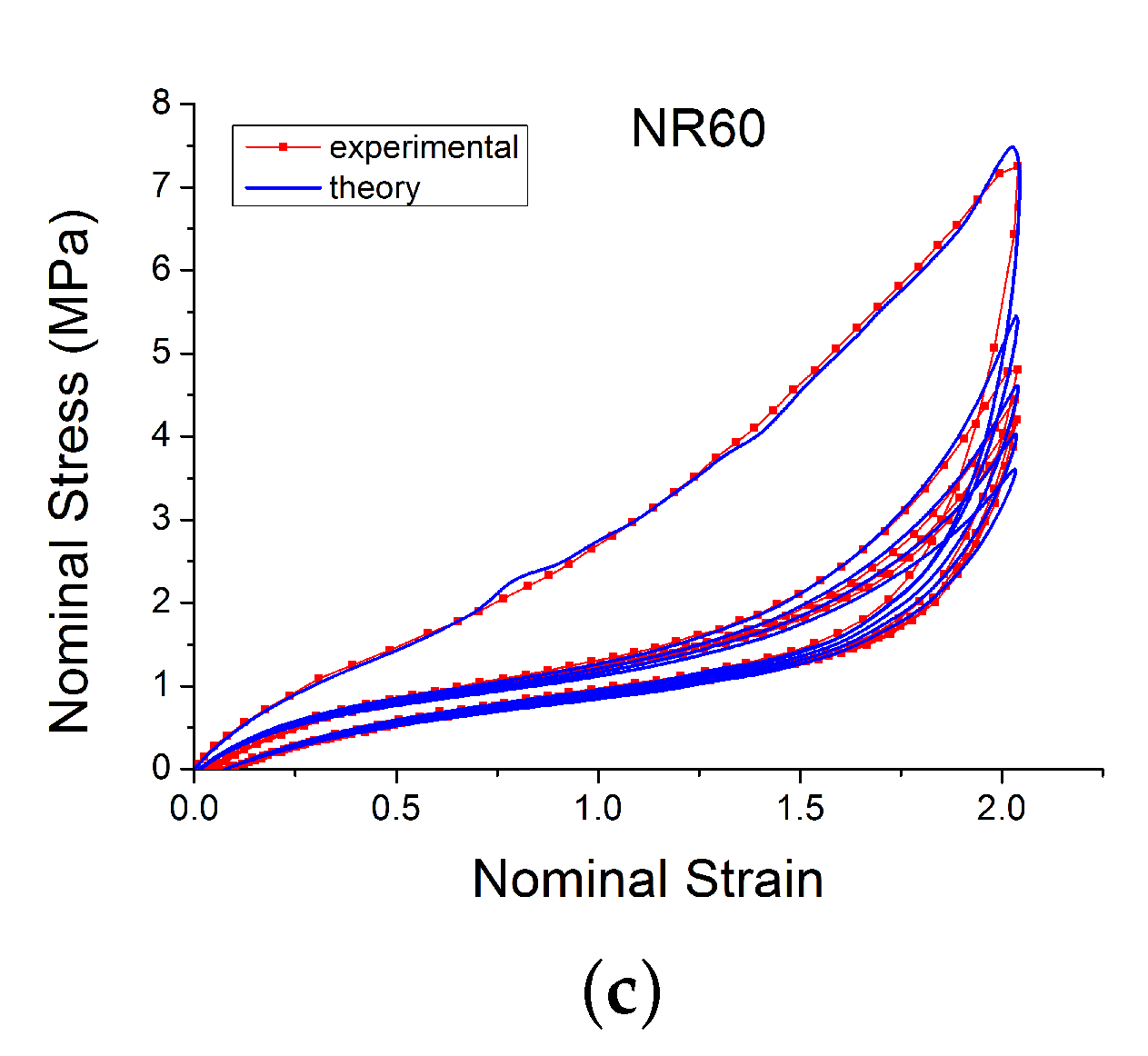
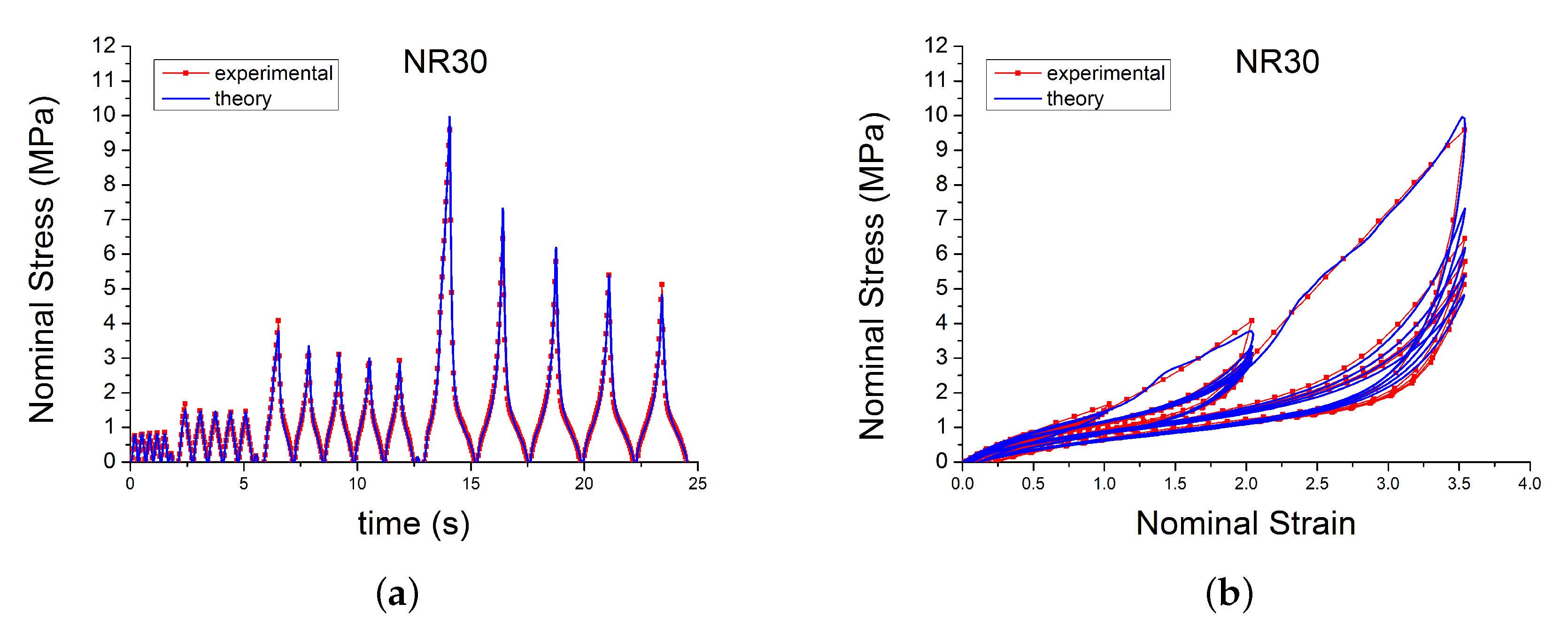
4.2. Model Fit to Experimental Data
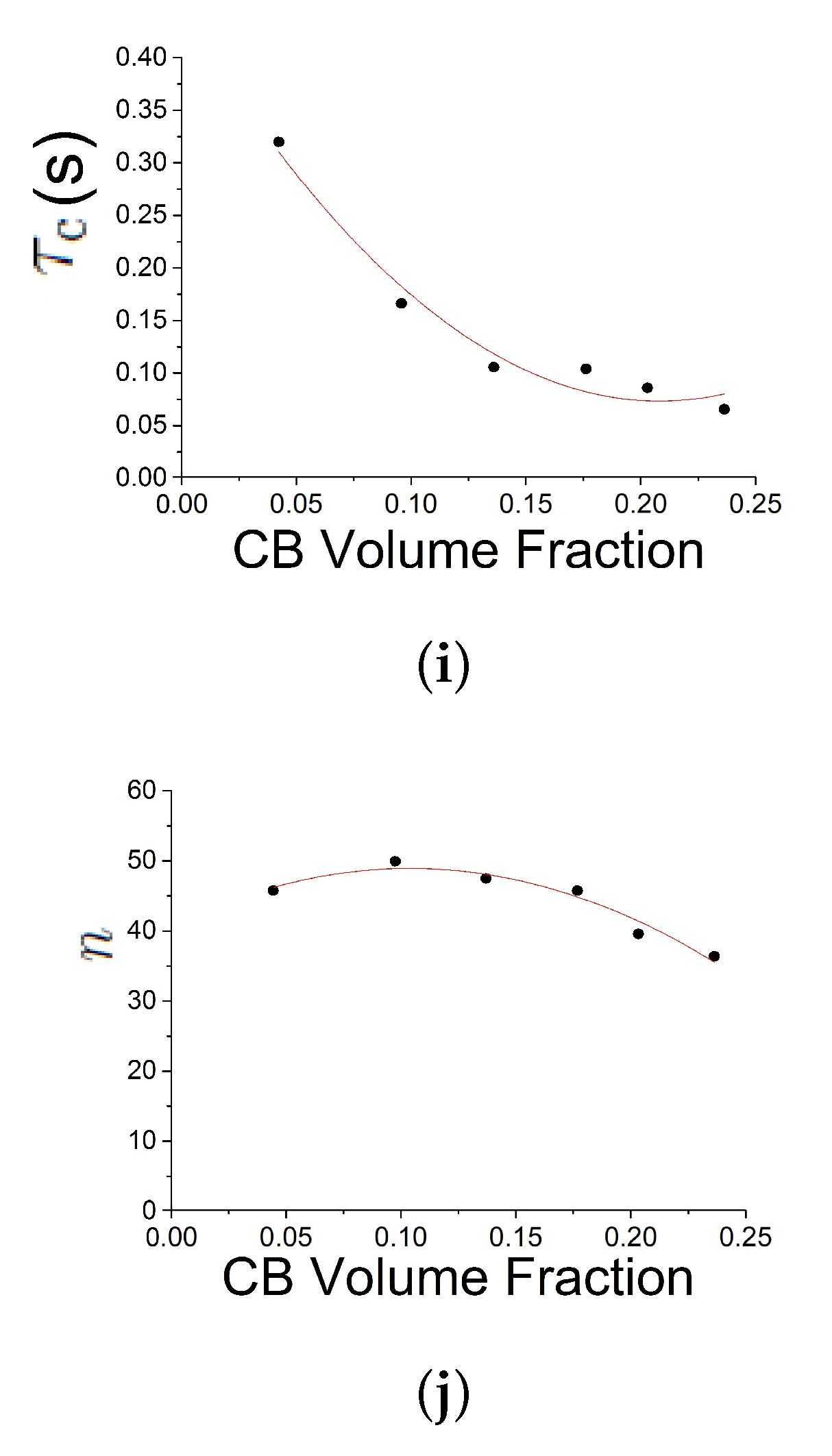
4.3. Effect of Carbon Black Content on the Parameters Used in the New Model
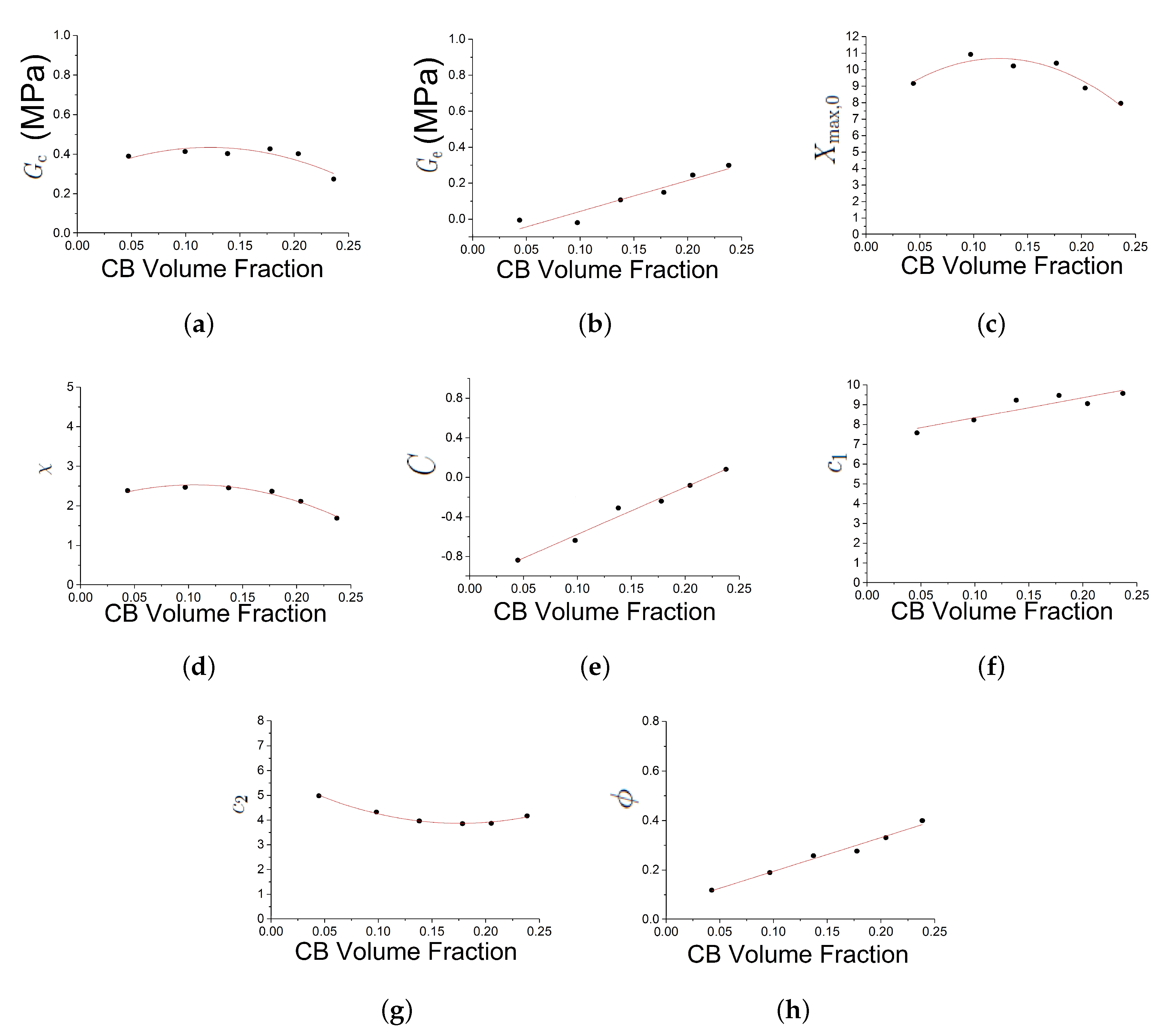
- is the modulus resulting from network crosslink and it is relatively constant with the CB volume fraction. It is found to be in a typical range for Natural Rubber vulcanizates. There is a drop in crosslink density at the highest filler loading, whose origin is not clear and may be due to experimental uncertainties and/or parameter correlations.
- , the modulus resulting from network entanglement, is monotonically increasing with the CB concentration. This is surprising and lacks a clear explanation up to now. Probably this parameter somehow captures the increasing low-strain stiffness (Payne effect), even though it was not designed to fulfil this purpose.
- , represents the scaling of the elastic and inelastic part, is proportional to the true filler volume fraction.
- n, the distance between the network nodes is in a typical range, too. It is constant for the samples containing less than 30 vol. % of carbon black and then slightly decreases, roughly in accordance with the small drop in crosslink modulus at these filler concentrations.
- , the exponent of the amplification factor distribution, is approximately constant.
- , is decreasing with filler volume fraction.
- is approximately constant with filler volume fraction.
- C is increasing. The parameter was introduced primarily to modify the shape of the virgin loading curve. A value generates a rather linear curve, as is observed for many highly filled compounds.
- decreases with volume fraction and appears to asymptotic. From Equation (8) it can be seen that defines the timescale on which relaxes without load. The value obtained from fitting here create an optimal model for the timescale of the fit, but it may fail for longer simulation times. An optimal determination of and requires a stress relaxation characterisation in the fitting data.
- increases modestly with volume fraction, probably representing that the rubber-filler structures to be broken down during softening become more rigid at higher filler loadings.
4.4. Finite Element Analysis
Benchmark Tests
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DFM | Dynamic Flocculation Model |
| MD | Molecular Dynamics |
| TARRC | Tun Abdul Razac Reseach Centre |
| NR | Natural Rubber |
| SMR | Standard Malaysian Rubber |
| FEF | Fast Extruding Furnace |
| PHR | Part per Hundred Rubber |
| CB | Carbon Black |
| JLR | Jaguar Land Rover |
References
- Li, Z.; Wang, Y.; Li, X.; Li, Z.; Wang, Y. Experimental investigation and constitutive modeling of uncured carbon black filled rubber at different strain rates. Polym. Test. 2019, 75, 117–126. [Google Scholar] [CrossRef]
- Machado, G.; Chagnon, G.; Favier, D. Induced anisotropy by the Mullins effect in filled silicone rubber. Mech. Mater. 2012, 50, 70–80. [Google Scholar] [CrossRef]
- Luo, R.K.; Peng, L.M.; Wu, X.; Mortel, W.J. Mullins effect modelling and experiment for anti-vibration systems. Polym. Test. 2014, 40, 304–312. [Google Scholar] [CrossRef]
- Wang, S.; Chester, S.A. Modeling thermal recovery of the Mullins effect. Mech. Mater. 2018, 126, 88–98. [Google Scholar] [CrossRef]
- Marckmann, G.; Chagnon, G.; Le Saux, M.; Charrier, P. Experimental investigation and theoretical modelling of induced anisotropy during stress-softening of rubber. Int. J. Solids Struct. 2016, 97, 554–565. [Google Scholar] [CrossRef][Green Version]
- Diani, J.; Fayolle, B.; Gilormini, P. A review on the Mullins effect. Eur. Polym. J. 2009, 45, 601–612. [Google Scholar] [CrossRef]
- Gros, A.; Verron, E.; Huneau, B. A physically-based model for strain-induced crystallization in natural rubber. Part II: Derivation of the mechanical model. J. Mech. Phys. Solids 2019, 125, 255–275. [Google Scholar] [CrossRef]
- Behnke, R.; Berger, T.; Kaliske, M. Numerical modeling of time-and temperature-dependent strain-induced crystallization in rubber. Int. J. Solids Struct. 2018, 141, 15–34. [Google Scholar] [CrossRef]
- Plagge, J.; Klüppel, M. Determining strain-induced crystallization of natural rubber composites by combined thermography and stress-strain measurements. Polym. Test. 2018, 66, 87–93. [Google Scholar] [CrossRef]
- Huneau, B. Strain-induced crystallization of natural rubber: A review of X-ray diffraction investigations. Rubber Chem. Technol. 2011, 84, 425–452. [Google Scholar] [CrossRef]
- Horstemeyer, M.F. Multiscale modeling: A review. In Practical Aspects of Computational Chemistry; Springer: Berlin, Germany, 2009; pp. 87–135. [Google Scholar]
- Gooneie, A.; Schuschnigg, S.; Holzer, C. A review of multiscale computational methods in polymeric materials. Polymers 2017, 9, 16. [Google Scholar] [CrossRef] [PubMed]
- Shojaei, A.; Li, G. Viscoplasticity analysis of semicrystalline polymers: A multiscale approach within micromechanics framework. Int. J. Plast. 2013, 42, 31–49. [Google Scholar] [CrossRef]
- Carleo, F.; Barbieri, E.; Whear, R.; Busfield, J. Limitations of viscoelastic constitutive models for carbon-black reinforced rubber in medium dynamic strains and medium strain rates. Polymers 2018, 10, 988. [Google Scholar] [CrossRef] [PubMed]
- Ogden, R.; Roxburgh, D. A pseudo–elastic model for the Mullins effect in filled rubber. In Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences; The Royal Society: London, UK, 1999; Volume 455, pp. 2861–2877. [Google Scholar]
- Dorfmann, A.; Ogden, R. A pseudo-elastic model for loading, partial unloading and reloading of particle-reinforced rubber. Int. J. Solids Struct. 2003, 40, 2699–2714. [Google Scholar] [CrossRef]
- Wrubleski, E.G.M.; Marczak, R.J. A modification of hyperelastic incompressible constitutive models to include non-conservative effects. In Proceedings of the 22nd International Congress of Mechanical Engineering (COBEM 2013), Ribeirão Preto, Brazil, 3–7 November 2013; pp. 2176–5480. [Google Scholar]
- Hurtado, J.; Lapczyk, I.; Govindarajan, S. Parallel rheological framework to model non-linear viscoelasticity, permanent set, and Mullins effect in elastomers. Const. Model. Rubber VIII 2013, 95. [Google Scholar] [CrossRef]
- Nandi, B.; Dalrymple, T.; Yao, J.; Lapczyk, I. Importance of capturing non-linear viscoelastic material behavior in tire rolling simulations. In Proceedings of the 33rd Annual Meeting and Conference on the Tire Science and Technology, At Akron, OH, USA, 8–10 September 2014. [Google Scholar]
- Lorenz, H.; Klüppel, M.; Heinrich, G. Microstructure-based modelling and FE implementation of filler-induced stress softening and hysteresis of reinforced rubbers. ZAMM 2012, 92, 608–631. [Google Scholar] [CrossRef]
- Khiêm, V.N.; Itskov, M. An averaging based tube model for deformation induced anisotropic stress softening of filled elastomers. Int. J. Plast. 2017, 90, 96–115. [Google Scholar] [CrossRef]
- Kojima, T.; Koishi, M. Influence of Filler Dispersion on Mechanical Behavior with Large-Scale Coarse-Grained Molecular Dynamics Simulation. Technische Mechanik 2018, 38, 41–54. [Google Scholar]
- Hagita, K.; Morita, H.; Doi, M.; Takano, H. Coarse-grained molecular dynamics simulation of filled polymer nanocomposites under uniaxial elongation. Macromolecules 2016, 49, 1972–1983. [Google Scholar] [CrossRef]
- Muhr, A.H. Modeling the Stress-Strain Behavior of Rubber. Rubber Chem. Technol. 2005, 78, 391–425. [Google Scholar] [CrossRef]
- Plagge, J.; Klüppel, M. A hyperelastic physically based model for filled elastomers including continuous damage effects and viscoelasticity. In Constitutive Models for Rubber X; CRC Press: Boca Raton, FL, USA, 2017; pp. 559–565. [Google Scholar]
- Aoyagi, Y.; Giese, U.; Jungk, J.; Beck, K. The analysis of Aging Processes of EPDM Elastomers using low field NMR with Inverse Laplace Transform and Stress Relaxation Measurements. KGK-Kautschuk Gummi Kunststoffe 2018, 71, 26–35. [Google Scholar]
- Ehrburger-Dolle, F.; Morfin, I.; Bley, F.; Livet, F.; Heinrich, G.; Richter, S.; Piché, L.; Sutton, M. XPCS investigation of the dynamics of filler particles in stretched filled elastomers. Macromolecules 2012, 45, 8691–8701. [Google Scholar] [CrossRef]
- Plagge, J.; Klüppel, M. A physically based model of stress softening and hysteresis of filled rubber including rate-and temperature dependency. Int. J. Plast. 2017, 89, 173–196. [Google Scholar] [CrossRef]
- Kaliske, M.; Heinrich, G. An extended tube-model for rubber elasticity: Statistical-mechanical theory and finite element implementation. Rubber Chem. Technol. 1999, 72, 602–632. [Google Scholar] [CrossRef]
- Vilgis, T.A.; Heinrich, G.; Klüppel, M. Reinforcement of Polymer Nano-Composites: Theory, Experiments and Applications; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Marckmann, G.; Verron, E. Comparison of Hyperelastic Models for Rubber-Like Materials. Rubber Chem. Technol. 2006, 79, 835–858. [Google Scholar] [CrossRef]
- Plagge, J. On the Reinforcement of Rubber by Fillers and Strain-induced Crystallization. Ph.D. Thesis, Institutionelles Repositorium der Leibniz Universität Hannover, Hannover, Germany, 2018. [Google Scholar] [CrossRef]
- Klüppel, M.; Heinrich, G. Network structure and mechanical properties of sulfur-cured rubbers. Macromolecules 1994, 27, 3596–3603. [Google Scholar] [CrossRef]
- Mark, J.E. Physical Properties of Polymers Handbook; Springer: Berlin, Germany, 2007. [Google Scholar]
- Hänggi, P.; Talkner, P.; Borkovec, M. Reaction-rate theory: Fifty years after Kramers. Rev. Mod. Phys. 1990, 62, 251. [Google Scholar] [CrossRef]
- Bergstrom, J.S. Mechanics of Solid Polymers: Theory and computational modeling; William Andrew: Burlington, MA, USA, 2015. [Google Scholar]
- Heinrich, G.; Klüppel, M. Recent advances in the theory of filler networking in elastomers. In Filled Elastomers Drug Delivery Systems; Springer: Berlin, Germany, 2002; pp. 1–44. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| - | NR2 | NR10 | NR20 | NR30 | NR40 | NR50 | NR60 |
|---|---|---|---|---|---|---|---|
| Natural Rubber, SMR CV60 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Carbon Black, FEF N550 | 2 | 10 | 20 | 30 | 40 | 50 | 60 |
| Process oil, 410 | - | 1 | 2 | 3 | 4 | 5 | 6 |
| Zinc oxide | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Stearic acid | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Antioxidant/antiozonant, HPPD | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| Antiozonant wax | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Sulfur | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 |
| Accelerator, CBS | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 |
| t (min) | 15:16 | 13:50 | 11:50 | 10:30 | 10:00 | 9:04 | 7:10 |
| n | C | k | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0.557 | 0.26 | 0.33 | 11.27 | 2.29 | 21.56 | 11.20 | 2.17 | −0.78 | 0.399 | 100 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carleo, F.; Plagge, J.; Whear, R.; Busfield, J.; Klüppel, M. Modeling the Full Time-Dependent Phenomenology of Filled Rubber for Use in Anti-Vibration Design. Polymers 2020, 12, 841. https://doi.org/10.3390/polym12040841
Carleo F, Plagge J, Whear R, Busfield J, Klüppel M. Modeling the Full Time-Dependent Phenomenology of Filled Rubber for Use in Anti-Vibration Design. Polymers. 2020; 12(4):841. https://doi.org/10.3390/polym12040841
Chicago/Turabian StyleCarleo, Francesca, Jan Plagge, Roly Whear, James Busfield, and Manfred Klüppel. 2020. "Modeling the Full Time-Dependent Phenomenology of Filled Rubber for Use in Anti-Vibration Design" Polymers 12, no. 4: 841. https://doi.org/10.3390/polym12040841
APA StyleCarleo, F., Plagge, J., Whear, R., Busfield, J., & Klüppel, M. (2020). Modeling the Full Time-Dependent Phenomenology of Filled Rubber for Use in Anti-Vibration Design. Polymers, 12(4), 841. https://doi.org/10.3390/polym12040841