1. Introduction
Large-scale computation of strong game-theoretic strategies is important in many domains. For example, there has been significant recent study on solving game-theoretic problems in national security from which real deployed systems have been built, such as a randomized security check system for airports [
1]. Typically large-scale equilibrium-finding algorithms output massive strategy files (which are often encoded in binary), which are stored in a table and looked up by a computer during gameplay. For example, creators of the optimal strategy for two-player limit Texas hold’em recently wrote, “Overall, we require less than 11 TB [terabytes] of storage to store the regrets and 6 TB to store the average strategy during the computation, which is distributed across a cluster of computation nodes. This amount is infeasible to store in main memory,...” [
2]. While such approaches lead to very strong computer agents, it is difficult to see how a human could implement these strategies. For cases where humans will be making real-time decisions we would like to compute strategies that are easily interpretable. In essence, we are saying that a strategy is human understandable if a human could implement it efficiently in real time having memorized only a small number of items in advance.
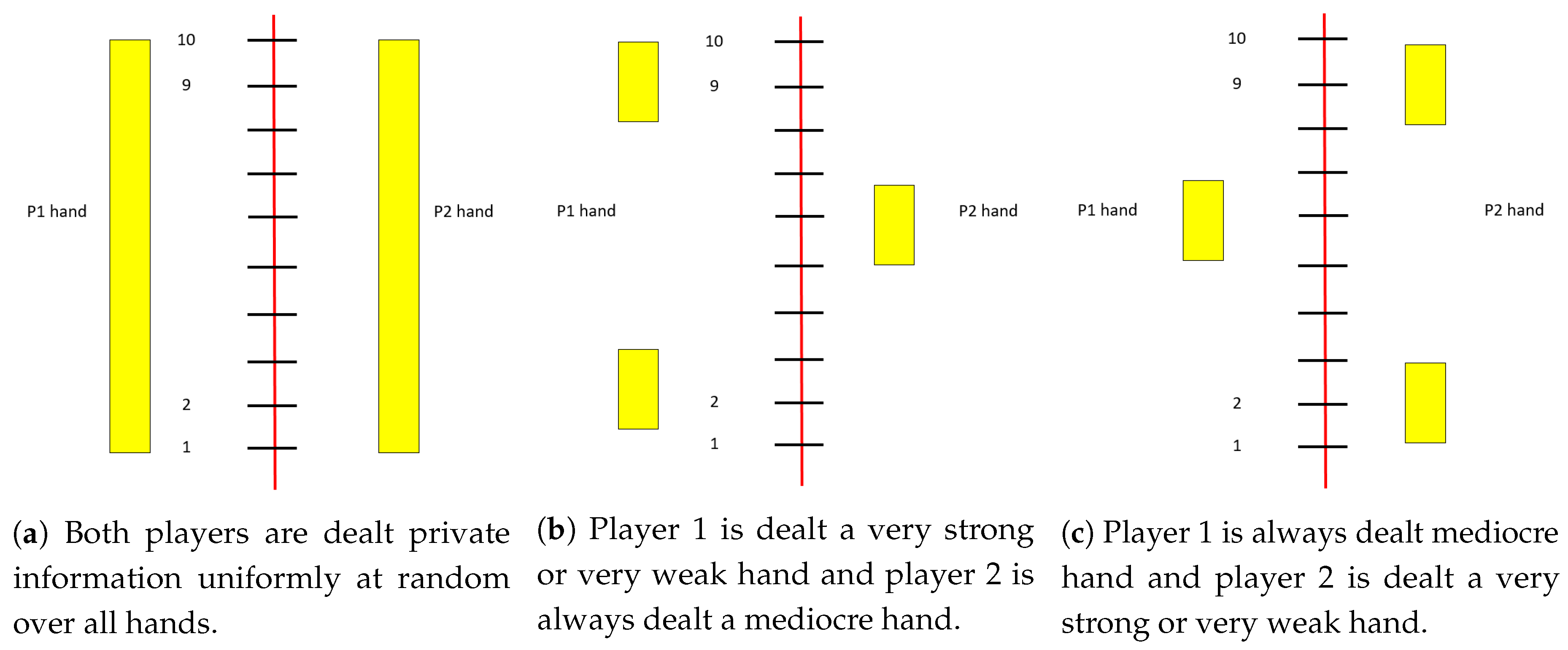
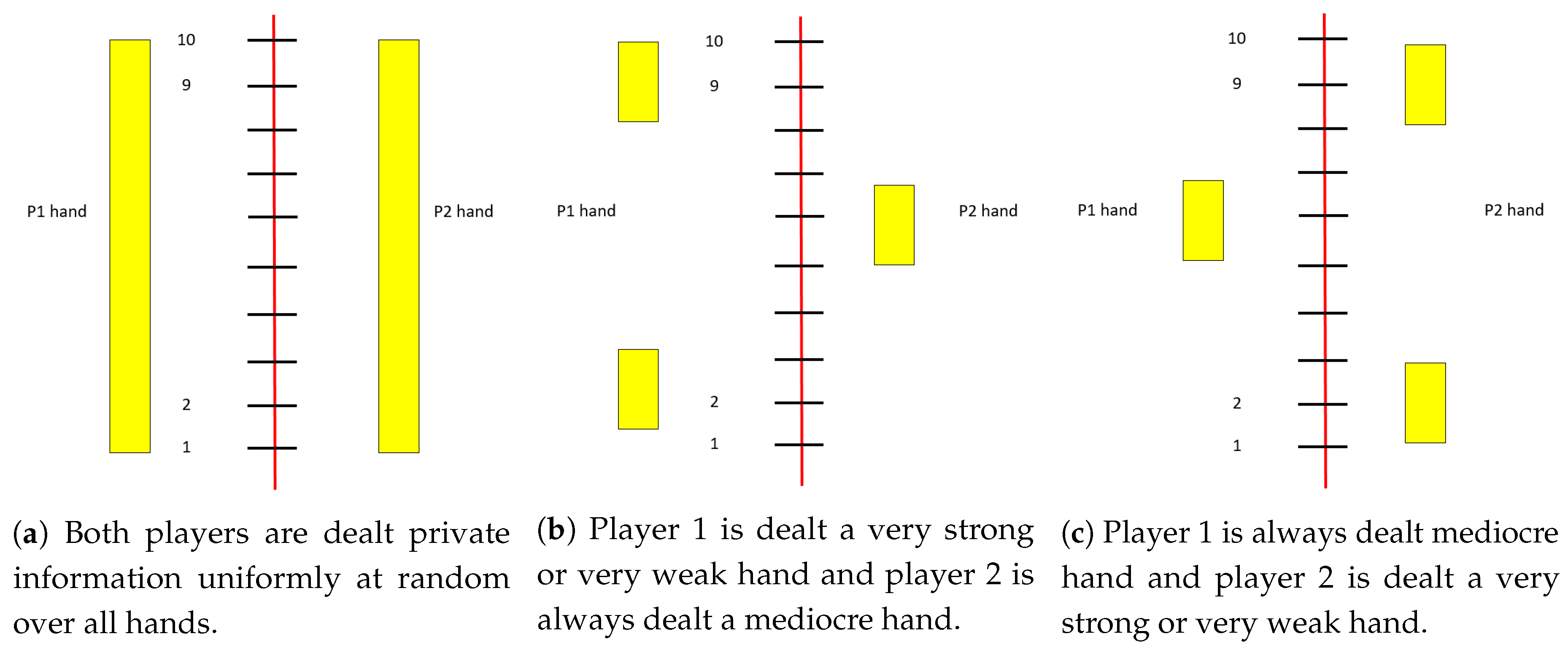
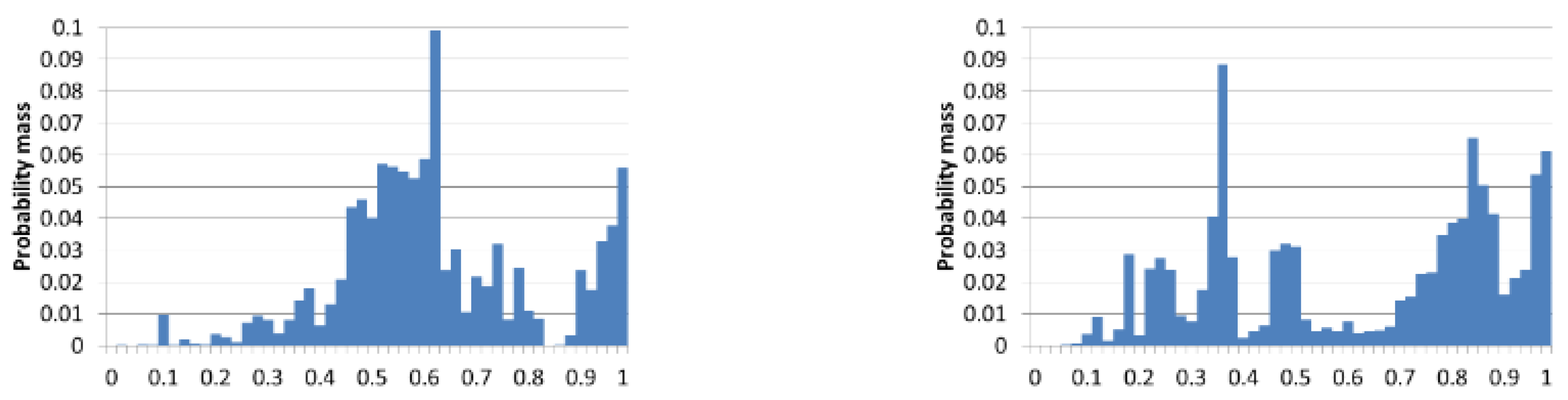
Suppose a human plans to play the following two-player no-limit poker game. Player 1 and player 2 both ante $0.50 and are dealt a card from a 10-card deck and each have a stack of $3 after posting the ante. Player 1 can bet any multiple of 0.1 from 0 to 3 (he has 31 possible actions for each hand). Player 2 can then call or fold. If player 2 folds, then player 1 wins the $1 from the antes. Otherwise the player with the better card wins the amount bet plus the antes. For example, if player 1 has a 4, player 2 has a 9, player 1 bets 0.4 and player 2 calls, then player 2 wins 0.4 plus the antes.
If both players are dealt cards uniformly (
Figure 1a), then a Nash equilibrium strategy for player 1 is:
Card 1: Bet 0.1 pr. 0.091, 0.6 pr. 0.266, 1.8 pr. 0.643
Card 2: Bet 0 pr. 0.660, 0.3 pr. 0.231, 0.6 pr. 0.109
Card 3–6: Bet 0 pr. 1
Card 7: Bet 0.1 pr. 1
Card 8: Bet 0.3 pr. 1
Card 9: Bet 0.6 pr. 1
Card 10: Bet 1.8 pr. 1
This can be computed quickly using, e.g., a linear programming formulation [
3]. Note that the equilibrium strategy includes
bluffing (i.e., betting with weak hands).
However, suppose the cards are dealt according a different distribution: player 1 is either dealt a very strong hand (10) or a very weak hand (1) with probability 0.5 while player 2 is always dealt a medium-strength hand (
Figure 1b). Then the equilibrium strategy for player 1 is:
If player 1 is always dealt a medium-strength hand (5) while player 2 is dealt a very strong or very weak hand with probability 0.5 (
Figure 1c), then the equilibrium strategy is:
What if player 1 is dealt a 1 with probability 0.09, 2 with probability 0.19, 3 with probability 0.14, etc.? For each game instance induced by a probability distribution over the private information, we could solve it quickly if we had access to a linear programming (LP) solver. But what if a human is to play the game without knowing the distribution in advance and without aid of a computer? He would need to construct a strong game plan in advance that is capable of playing well for a variety of distributions with minimal real-time computation. A natural approach would be to solve and memorize solutions for several games in advance, then quickly determine which of these games is closest to the one actually encountered in real time. This is akin to the k-nearest neighbors (k-nn) algorithm from machine learning. A second would be to construct understandable rules (e.g., if .. else ..) from a database of solutions that can be applied to a new game. This is akin to the decision tree and decision list approaches. Thus, we are proposing to apply approaches from machine learning in order to improve human ability to implement Nash equilibrium strategies. Typically algorithms from machine learning have been applied to game-theoretic agents only in the context of learning to exploit mistakes of suboptimal opponents (aka opponent exploitation). By and large the approaches for computing Nash equilibrium and opponent exploitation have been radically different. We provide a new perspective here by integrating learning into the equilibrium-finding paradigm.
We present a novel learning formulation of this problem. In order to apply algorithms we develop novel distance functions (both between pairs of input points and between pairs of output points) which are more natural for our setting than standard distance metrics. To evaluate our approaches we compute a large database of game solutions for random private information distributions. We are able to efficiently apply k-nn to the dataset using our custom distance functions. We observed that we are able to obtain low testing error even when training on a relatively small fraction of the data, which suggests that it is possible for humans to learn strong strategies by memorizing solutions to a carefully selected small set of presolved games. However, this approach would require humans to quickly be able to compute the distance between a new game and all games from the training database in order to determine the closest neighbor, which could be computationally taxing. Furthermore, there are some concerns as to whether this would actually constitute “understanding” as opposed to “memorizing”. Thus, we focus on the decision tree approach, which allows us to deduce simple human-understandable rules that can be easily implemented.
While prior approaches for learning in games of imperfect information (and poker specifically) often utilize many domain-specific features (e.g., number of possible draws to a flush, number of high cards on the board, etc.), we prefer to develop approaches that are do not require knowing expert domain features (since they are likely not relevant for other domains and, in the case of poker, may not be relevant even for other seemingly similar variants). The features we use are the cumulative distribution function values of the private information states of the players, which are based purely on the rules of the game. (We also compare performance of using several other representations, e.g., using pdf values, and separating out the data for each hand to create 10 data points per game instance instead of 1). Thus, the approach is general and not reliant on expert poker knowledge.
The problem of constructing human-interpretable rules has been studied recently in machine learning, e.g., [
4,
5], particularly for medical applications [
6,
7,
8].
2. Qualitative Models and Endgame Solving
There has been some prior study of human understandable strategies in imperfect-information games, and in poker specifically. Ankenman and Chen compute analytical solutions of several simplified poker variants by first assuming a given human-understandable qualitative structure on the equilibrium strategies, and then computing equilibrium strategies given this presumed structure, typically by solving a series of indifference equations [
9]. While the computed strategies are generally interpretable by humans, the models were typically constructed from a combination of trial and error and expert intuition, and not constructed algorithmically. More recent work has shown that leveraging such qualitative models can lead to new equilibrium-finding algorithms that outperform existing approaches [
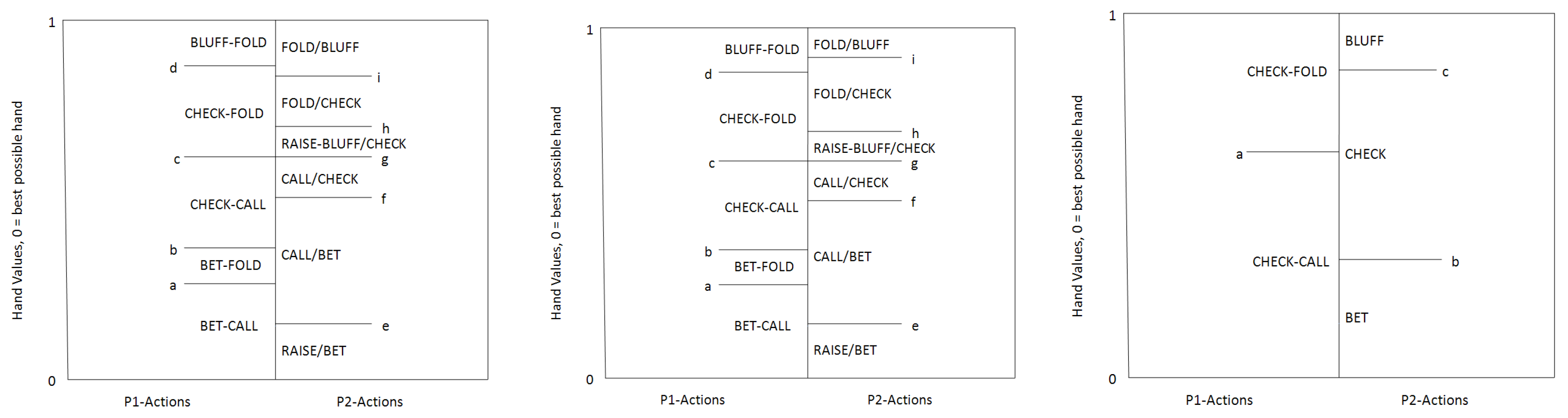
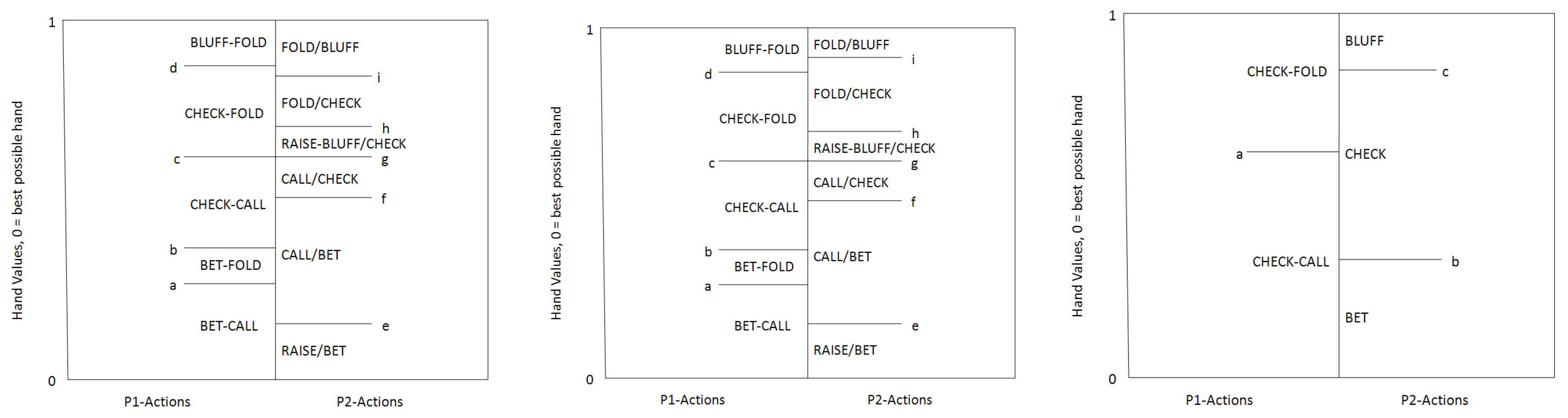
10]. That work proposed three different qualitative models for the final round of two-player limit Texas hold’em (
Figure 2), and showed empirically that equilibrium strategies conformed to one of the models for all input information distributions (and that all three were needed). Again here the models were constructed by manual trial and error, not algorithmically.
We note that while the problem we are considering in this paper is a “toy game”, it captures important aspects of real poker games and we expect our approaches to have application to larger more realistic variants (our game generalizes many common testbed variants; if we had allowed player 2 to bet after player 1 checks and the deck had only 3 cards and only one bet size is allowed, this would be Kuhn poker). In the recent Brains vs. Artificial Intelligence two-player no-limit Texas hold’em competition, the agent Claudico computed the strategy for the final betting round in real time, and the best human player in the world for that variant (Doug Polk) commented that the “endgame solver” was the strongest component of the agent [
11], and endgame solving was also a crucial component of subsequent success of the improved agent Libratus [
12]. The creator of another recent superhuman agent has stated that “DeepStack is all endgame solving,” referring to the fact that its algorithm works by viewing different rounds of the game as separate endgames which are solved independently, using deep learning to estimate the values of the endgames terminal states [
13]. Endgame solving assumes that both agents had private information distributions induced by the strategies for the prior rounds using Bayes’ rule, assuming they had been following the agent’s strategy for the prior rounds [
14]. The game we study here is very similar to no-limit Texas hold’em endgames, except that we are assuming a ten-card deck, specific stack sizes and betting increment, and that raises are not allowed. We expect our analysis to extend in all of these dimensions and that our approaches will have implications for no-limit Texas hold’em. No-limit Texas hold’em is the most popular poker variant for humans, and is a widely recognized AI challenge problem. The game tree has approximately
states for the variant played in the Computer Poker Competition [
15]. There has been significant interest in endgame solving in particular in the last several years [
12,
13,
16,
17].
3. Learning Formulation
We now describe how we formulate the problem of computing a solution to a new game instance from a database of solutions to previously solved game instances as a learning problem. The inputs will be the 20 values of the private information cumulative distribution function (cdf). First are the ten values for player 1 (the probability he is dealt ≤ 1, probability he is dealt ≤ 2, etc.), followed by the ten cdf values for player 2. For example for the uniform case the input would be
for the situation where player 1 is dealt a 10 or 1 with prob. 0.5 and player 2 is always dealt a 5 it is
and for the situation where player 1 is always dealt a 5 and player 2 is dealt a 10 or 1 with prob. 0.5
The output will be a vector of the 310 Nash equilibrium strategy probabilities of betting each size with each hand. First for betting 0, 0.1, 0.2, …, 3 with 1, then with 2, etc. (recall that there are 31 sizes for each of ten hands). For example for the uniform case the output would be
We could have created ten different data points for each game corresponding to the strategy for each hand, as opposed to predicting the full strategy for all hands; however we expect that predicting complete strategies is better than just predicting strategies for individual hands because the individual predicted hand strategies may not balance appropriately and could be highly exploitable as a result. We will explore this design choice in the experiments in
Section 4.
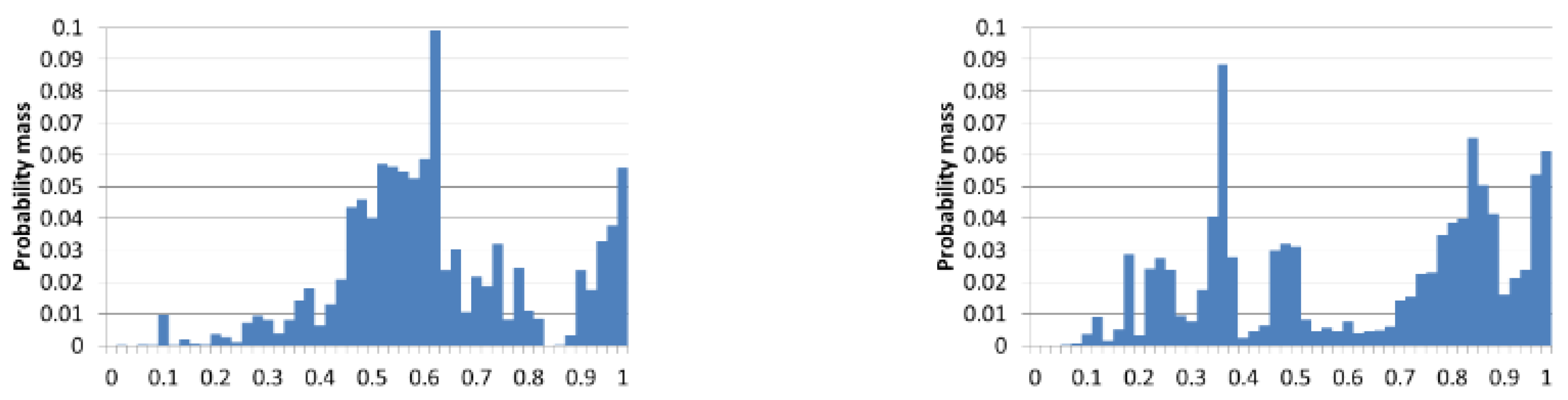
To perform learning on this formulation, we need to select a distance function to use between a pair of inputs as well as a distance (i.e., cost) between each pair of outputs. Standard metrics of Euclidean or Manhattan distance are not very appropriate for probability distributions. A more natural and successful distance metric for this setting is earth mover’s distance (EMD). While early approaches for computing groupings of hands used L2 [
18], EMD has been shown to significantly outperform other approaches, and the strongest current approaches for game abstraction use EMD [
19]. Informally, EMD is the “minimum cost of turning one pile into the other, where the cost is assumed to be amount of dirt moved times the distance by which it is moved”, and there exists a linear-time algorithm for computing it for one-dimensional histograms (
Figure 3).
We define a new distance metric for our setting that generalizes EMD to multiple distributions. Suppose we want to compute the distance between training input vector X and testing input vector . Each vector contains 20 probabilities, 10 corresponding to player 1’s distribution and 10 to player 2’s. Our distance function will compute the EMD separately for each player, then return the average (Algorithm 1). We note that before the aggregation we normalize the EMD values by the maximum possible value (the distance between a point mass on the left-most and right-most columns) to ensure that the maximum of each is 1. We also create a new distance (i.e., cost) function between predicted output vector and the actual output vector from the training data Y (the output vectors have length 310, corresponding to 31 bet sizes for 10 hands). It computes EMD separately for the strategy vectors of size 31 for each hand which are then normalized and averaged (Algorithm 2). After specifying the form of the inputs and outputs and a distance metric between each pair of inputs and outputs, we have formulated the problem as a machine learning problem.
Note that our learning algorithms can take any cost function between output vectors as input. In addition to our generalized EMD metric, we can also compute exact exploitability. In two-player zero-sum games, the exploitability of a strategy
for player
i is the difference between the game value to player
i and the expected payoff of
against a nemesis strategy for the opponent. This is a good measure of the performance; all Nash equilibrium strategies have zero exploitability, and strategies with high exploitabilty can perform very poorly against a strong opponent. In general there exists a general linear program formulation for computing the best response payoff to a strategy (from which one can then subtract the game value to obtain exploitability) [
3]. However, we would like to avoid having to do a full linear program solve each time that a cost computation is performed during the run of a learning algorithm. There also exists a more efficient linear-time (in the size of the full game tree) algorithm called expectimax for computing best responses (and consequently exploitability as well) for two-player zero-sum games [
20]. For our specific setting (where both players are dealt a single card from a distribution and then select a single bet size from a discrete space), it turns out that we can obtain exploitability even faster by applying the technique described in Algorithm 3. This algorithm iterates over all bet sizes and for each, determines whether player 2 would prefer to call or fold against the given strategy of player 1 (depending on how often player 1 is betting with a worse vs. better hand in relation to the size of the pot). The key observation is that if player 2 calls, then he will win (betSize + 1) whenever player 1 has a worse hand, and he will lose betSize when player 1 has a better hand. So his expected payoff of calling will be
Since the expected payoff of folding is 0, he will prefer to call if
which yields the equation used in the algorithm.
| Algorithm 1 Distance between input vectors X, |
Inputs: cdf vectors , number of players n, deck size d
← cdf-to-pdf(X)
← cdf-to-pdf()
resultTotal ← 0
for to do
start ←
end ← start + d
result ← 0
for start to end−1 do
+
result ← result +
result ← result / (d−1)
resultTotal ← resultTotal + result
return (resultTotal / n) |
| Algorithm 2 Distance between output vectors Y, |
Inputs: Strategy vectors , deck size d, number of bet sizes b
resultTotal ← 0
for to do
start
end ← start + b
result ← 0
for start to end-1 do
+
result ← result +
result ← result / (b-1)
resultTotal ← resultTotal + result
return (resultTotal / d) |
| Algorithm 3 Compute exploitability |
Inputs: is probability P1 is dealt card i and P2 is dealt card j, is probability that
P1 bets the bet size with card i, is the bet size, is the game value to player 1
numCards
numBets
for to numCards do
for to numBets do
betSize
probWorse
probBetter
for to do
probWorse ← probWorse + probs[j][i] · strategy[j][b]
for to numCards do
probBetter ← probBetter + probs[j][i] · strategy[j][b]
sum ← probWorse + probBetter
if then
return () |
4. Experiments
We constructed a database of 100,000 game instances by generating random hand distributions and then computing a Nash equilibrium using the linear program formulation with Gurobi’s solver [
21]. The naïve approach for constructing the distributions (of assigning uniform distributions for the players independently) is incorrect because it does not account for the fact that if one player is dealt a card then the other player cannot also be dealt that card (as is the case in real poker). We instead used a Algorithm 5. We first generate the two distributions independently as in the naïve approach, using the procedure described in Algorithm 4. Algorithm 5 then multiplies these individual probabilities together only for situations where players are dealt different cards to compute a joint distribution.
| Algorithm 4 Generate point uniformly at random from n-dimensional simplex |
Inputs: dimension n
for to do
randomDouble(0,1)
for to do
return a |
| Algorithm 5 Generate private information distribution |
Inputs: dimension n, independent distributions
for to do
for to do
if i != j then
next
next
next
for to do
for to do
return |
We experimented with several data representations. The second uses the pdf values as the 20 features instead of the cdfs. The third separates each datapoint into 10 different points, one for each hand of player 1. Here the first 20 inputs are the cdfs as before, followed by a card number (1–10), which can be viewed as an additional 21st input, followed by the 31 strategy probabilities for that card. The fourth uses this approach with the pdf features. The 5th and 6th approaches are similar, but for the 21st input they list the cdf value of the card, not the card itself. The 7th–10th are similar to the 3rd–6th, but randomly sample a single bet size from the strategy vector to use as the output.
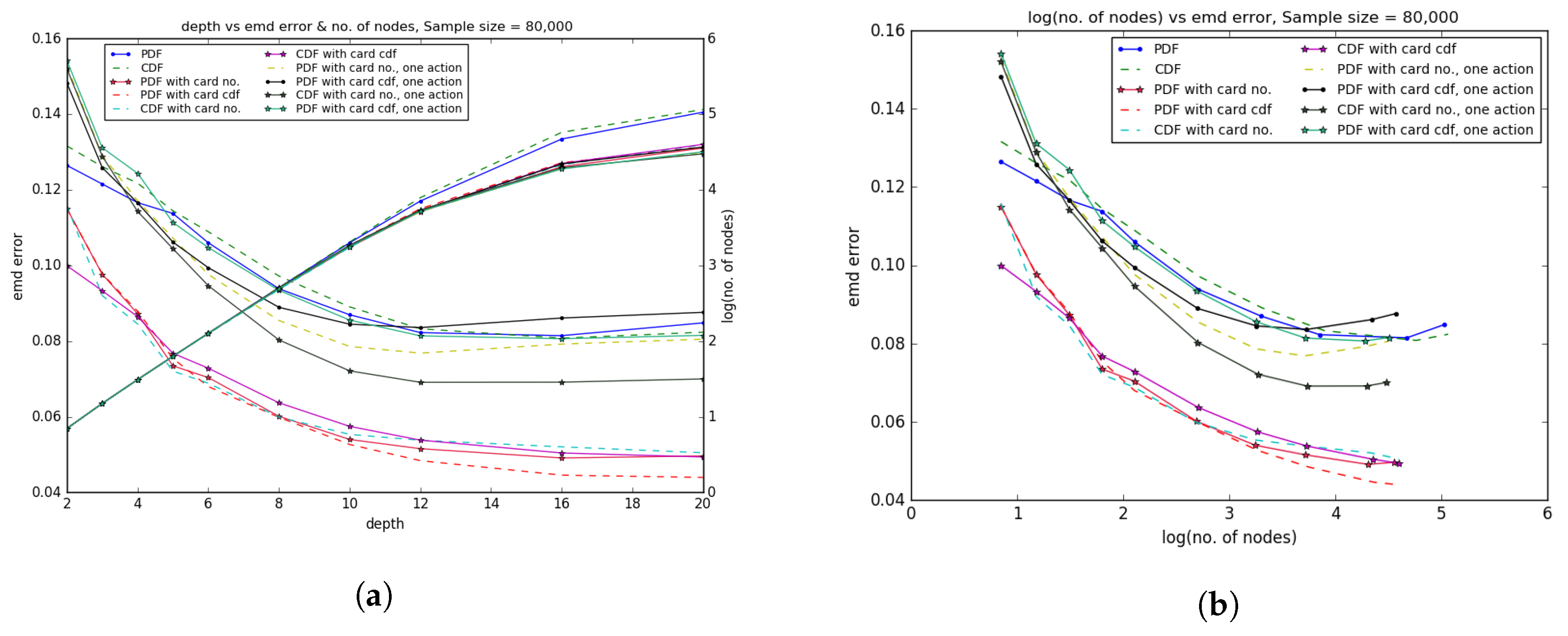
We created decision trees using 80,000 of the games from the database, using the standard division of 80% of the data for training and 20% for testing (so we trained on 64,000 games and tested on 16,000). We used Python’s built in decision tree regressor function from sklearn.tree from the scikit-learn library, which we were able to integrate with our new distance metrics. We constructed the optimal decision tree for depth ranging from 3 up to 20. From
Figure 4a, we can see the errors of the optimal tree as a function of the depth, for each of the different data representations. Not surprisingly error decreases monotonically with depth; however, increasing the depth leads to an exponential increase in the number of nodes.
Figure 4b shows how error decreases as a function of the (log of the) the number of nodes in the optimal decision tree.
The fourth representation, which uses the pdf values plus the cdf value of the card as the inputs, produces lowest error, and in general the approaches that output the data separately for each card produce lower errors than the ones that output full 310-length vectors. Note that if we were using full exploitability to evaluate the strategies produced then almost surely using the full 310 outputs would perform better, since they will take into account aggregate strategies across all hands to ensure the overall strategy is balanced; if we bet one size with a weak hand and a different size with a strong hand, it would be very easy for the opponent to exploit us. In fact, for other machine learning approaches, such as k-nn, using the full 310 outputs performs better; but for decision trees using separate outputs for each hand leads to better branching rules which produces lower error. Note that the pdf features encode more information than the cdfs (it is possible for two games with the same cdfs to have different pdfs), so we would expect pdf features to generally outperform cdf features.
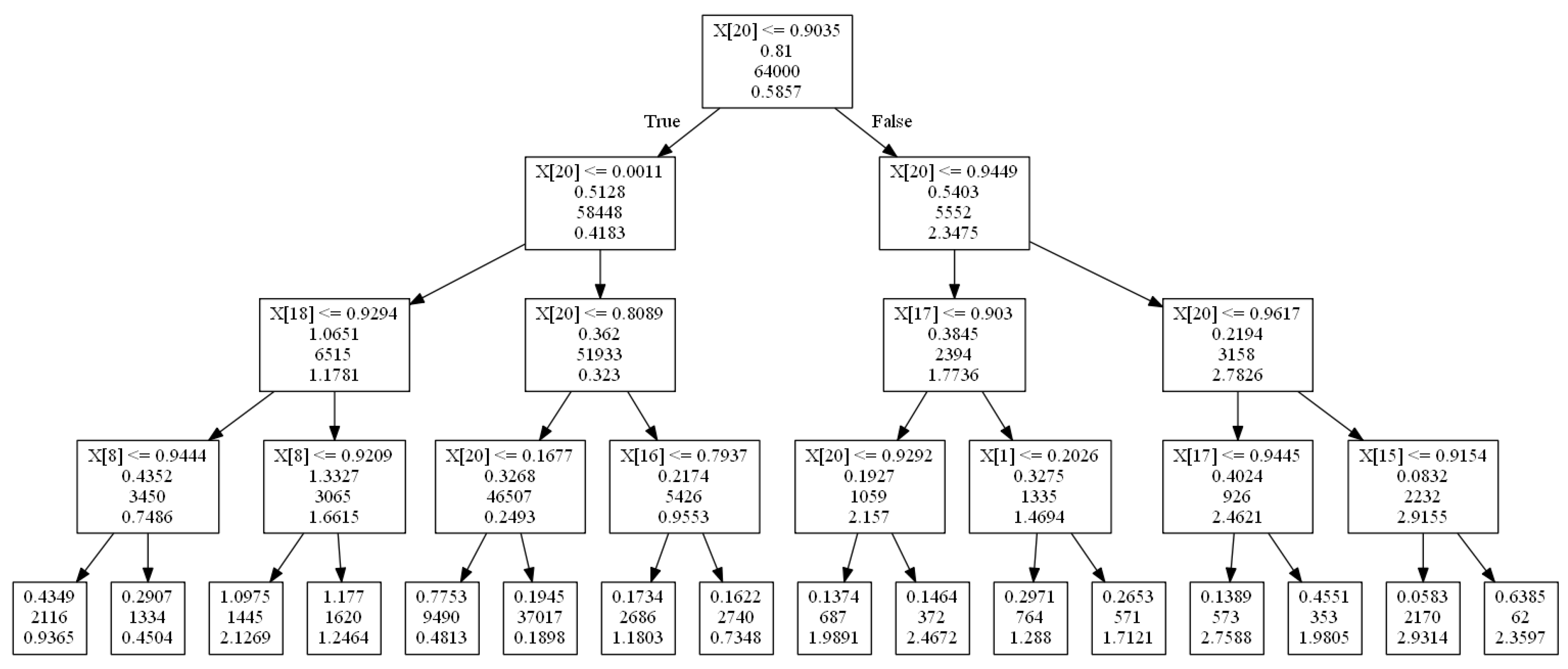
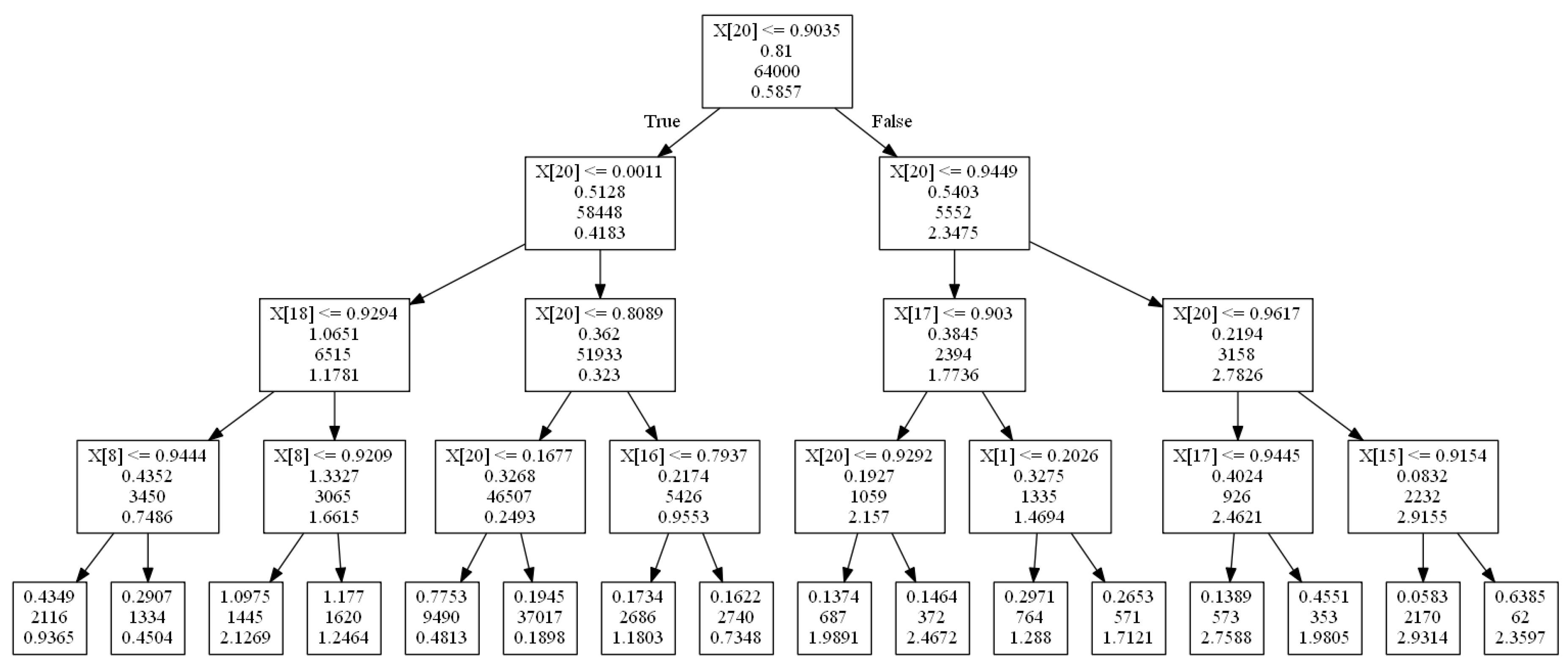
The optimal depth-4 decision tree for cdf input values, cdf value for a single card, and predicts a single bet size, is shown in
Figure 5. At each node the left edge corresponds to the True branch and the right to the False branch. The node entries are the variable/value branched on, the error induced due to the current branch split, the sample for the current split, and the output (i.e., bet size) predicted (leaf nodes only contain the final three). For example, the far right leaf node says that if
is false (i.e., player 1 has a hand with cdf value
), ..., if
is false (i.e., the cdf value of a card 6 for player 2 is
), then output a bet size of 2.3597.
From the optimal tree, we can deduce several fundamental rules of poker strategy. The “80-20 Rule” is based on the branch leading to the very small bet size of 0.1898, and the “All-in Rule” is based on the branch leading to the large bet size of 2.9314 on the far right of the tree.
Fundamental Rule of Poker Strategy 1 (80-20 Rule)
. If your hand beats between 20% and 80% of the opponent’s hand distribution, then you should always check (or make an extremely small bet).
Fundamental Rule of Poker Strategy 2 (All-In Rule)
. If your hand beats 95% of the opponent’s distribution of hands, and furthermore the opponent’s distribution contains a weak or mediocre hand no more than 90% of the time (i.e., it contains at least 10% strong hands), then you should go all-in.
Prior “fundamental rules” have been proposed, but often these are based on psychological factors or personal anecdotes, as opposed to rigorous analysis. For example, Phil Gordon writes, “
Limping1 is for Losers. This is
the most important fundamental in poker—for every game, for every tournament, every stake: If you are the first player to voluntarily commit chips to the pot, open for a raise. Limping is inevitably a losing play. If you see a person at the table limping, you can be fairly sure he is a bad player. Bottom line: If your hand is worth playing, it is worth raising” [
22]. However, some very strong agents such as Claudico [
11] and Libratus [
12] actually employ limping sometimes (in fact the name Claudico is Latin for “I limp”).
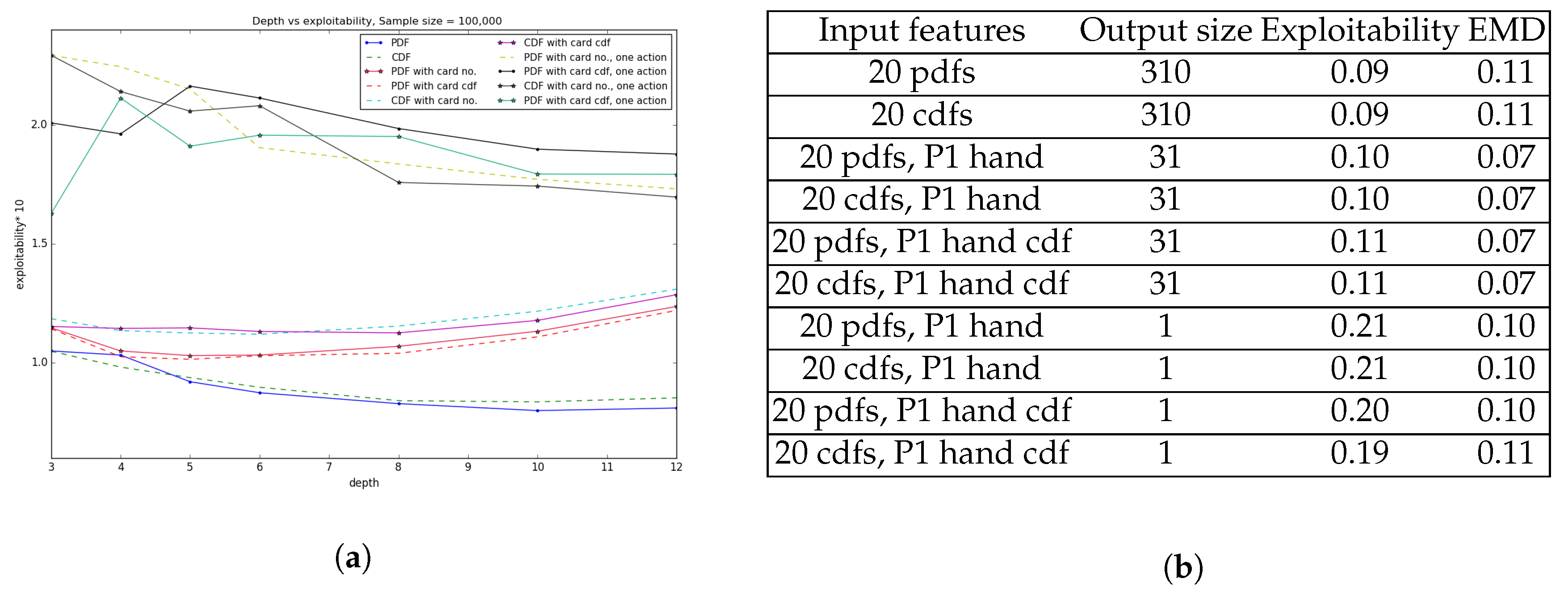
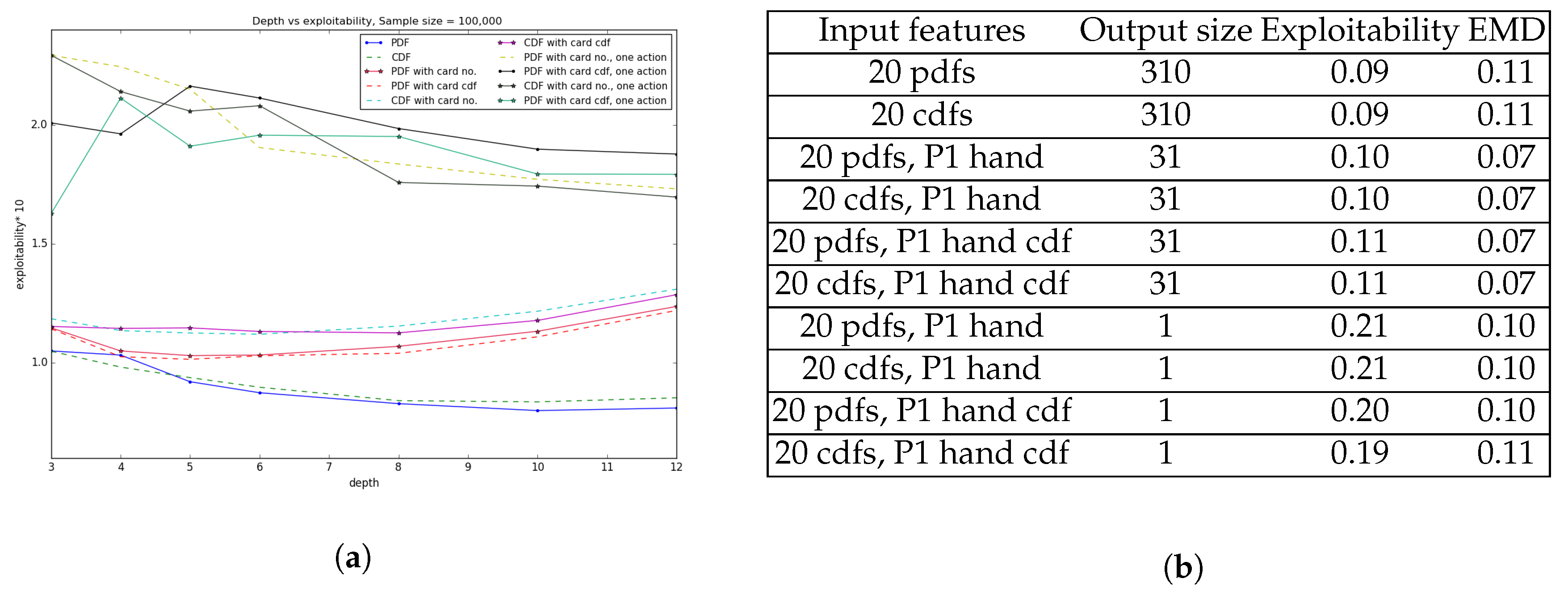
We also performed experiments using the exploitability cost function from Algorithm 3. For the first representation with 10 pdf values for both player’s each possible hand, joint probability distribution was calculated as above. The output strategy vector of the 31 bet sizes for each hand for player 1 was derived from the decision tree model. Then according to Algorithm 3 best response payoff for player 1 was calculated and subtracted from the presolved game value. For all the other representations with individual hand for player 1 as the 21th input feature, decision tree output was extracted for each card individually and then was combined into a single output strategy vector.
Figure 6a depicts the change in exploitability with respect to the depth of the decision tree. 310 output strategy outperforms 31 output vector strategy by a small margin whereas output with just the bet size in the last four representation produces relatively higher exploitability compared to the previous six comprehensive representations. Also later representations with just single bet size doesn’t result in smooth transition over depth for lower values due to the approximation in probability calculation considering only the most probable bet size, where there might exist other bet sizes for that particular hand with relatively smaller but positive probability. The table in
Figure 6b shows exploitability and EMD error among the different representations with depth of the tree limited to 5. It is evident from the experimental result that all the representations produce relatively negligible EMD error and exhibit low exploitability, i.e., in the range 0.09–0.21 as the maximum possible exploitability is the highest bet value of 3. The last four representations with single bet value over each individual hand are more prone to exploitability as expected since the probability of betting the other 30 possible values are totally ignored. Third to sixth entry of the table with 20 pdf and cdf representation along with player 1’s individual hand, where the output strategy is the 31 probability distribution over each bet size of that particular hand, best optimizes the tradeoff between exploitability and interpretability.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}