DARGS: Dynamic AR Guiding System for Indoor Environments


Abstract
:1. Introduction
2. Motivation and Contribution
3. Related Work
3.1. Tracking for Indoor Navigation and Path Visualization
3.2. Path Planning
4. Proposed System
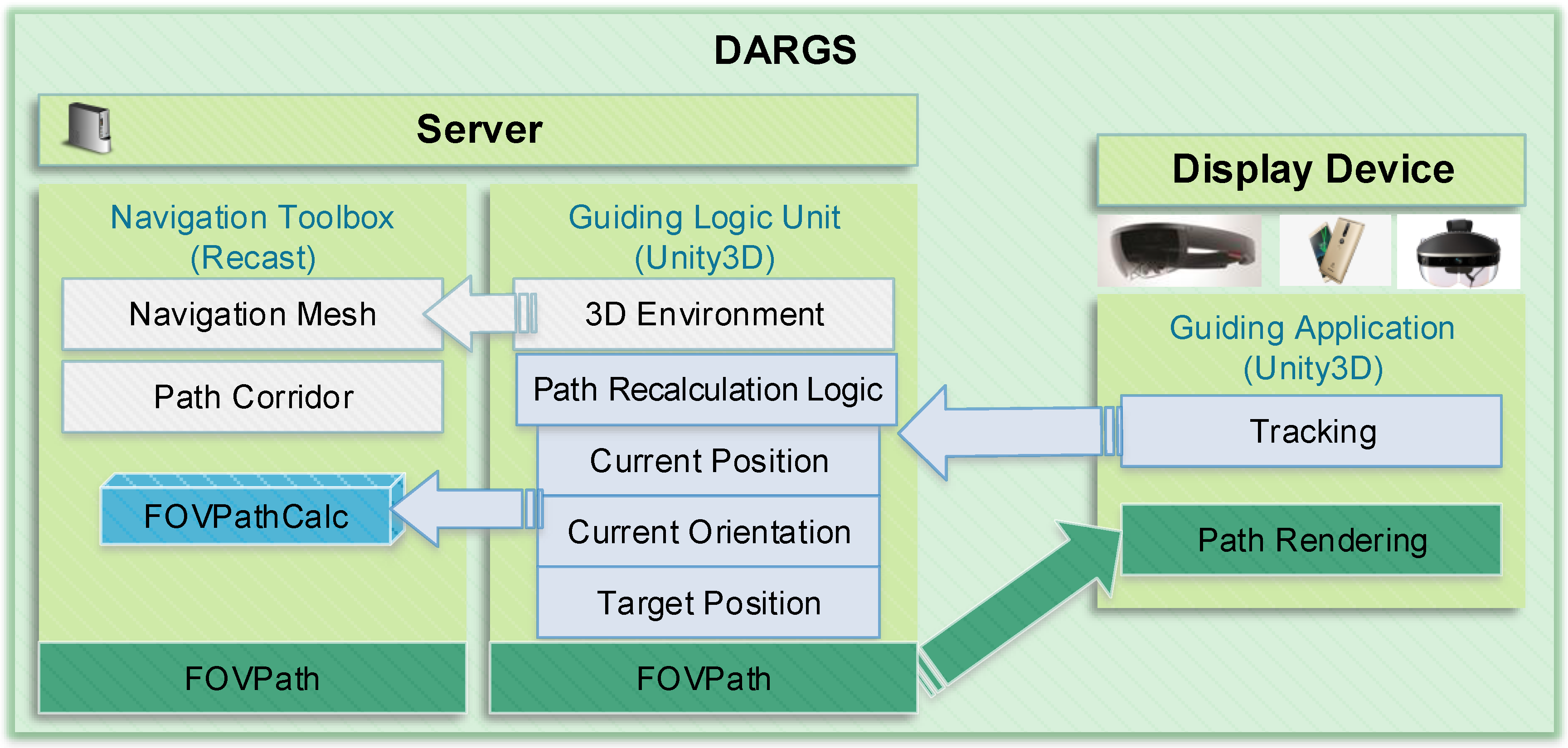
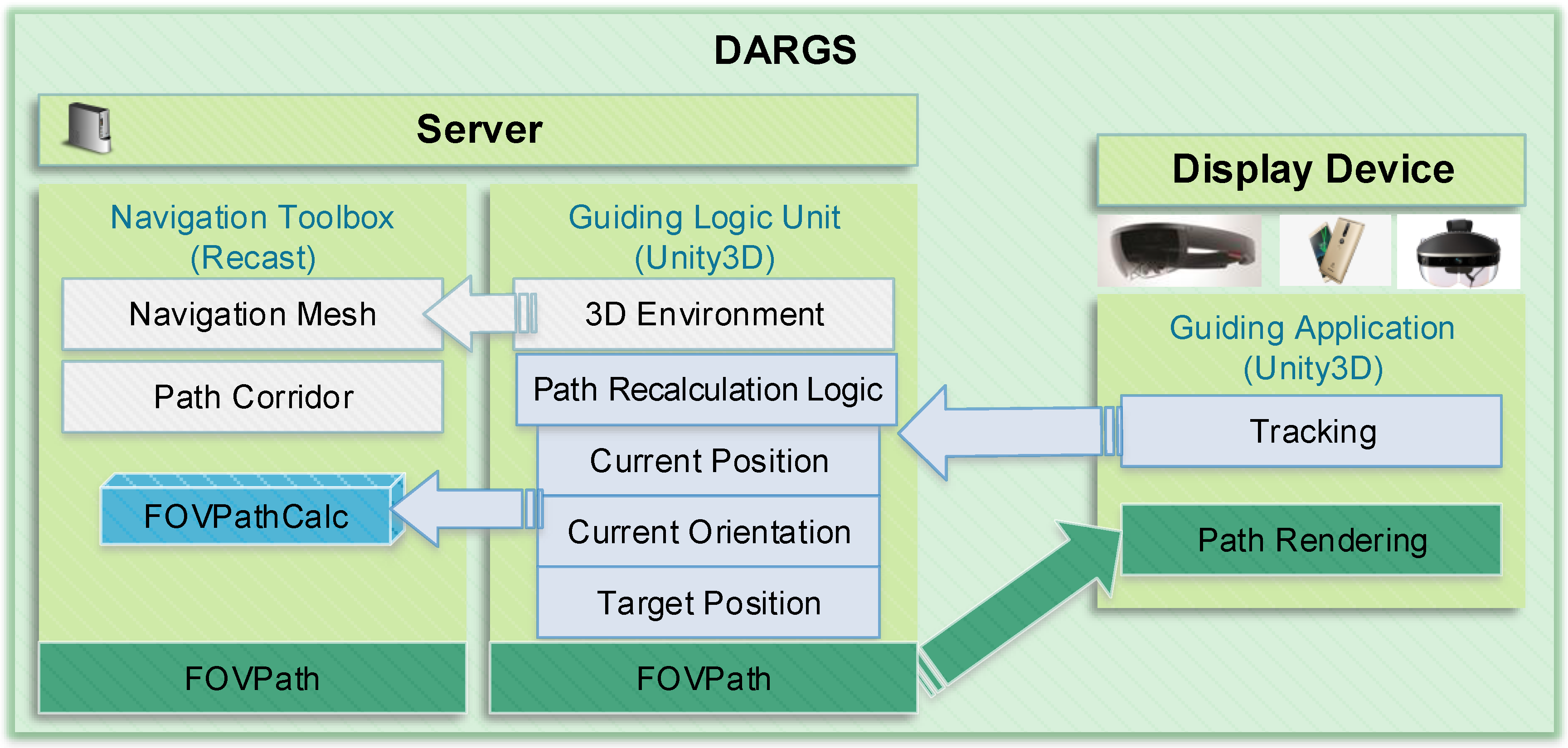
4.1. System Design
4.2. Implementation
4.2.1. Navigation Toolbox
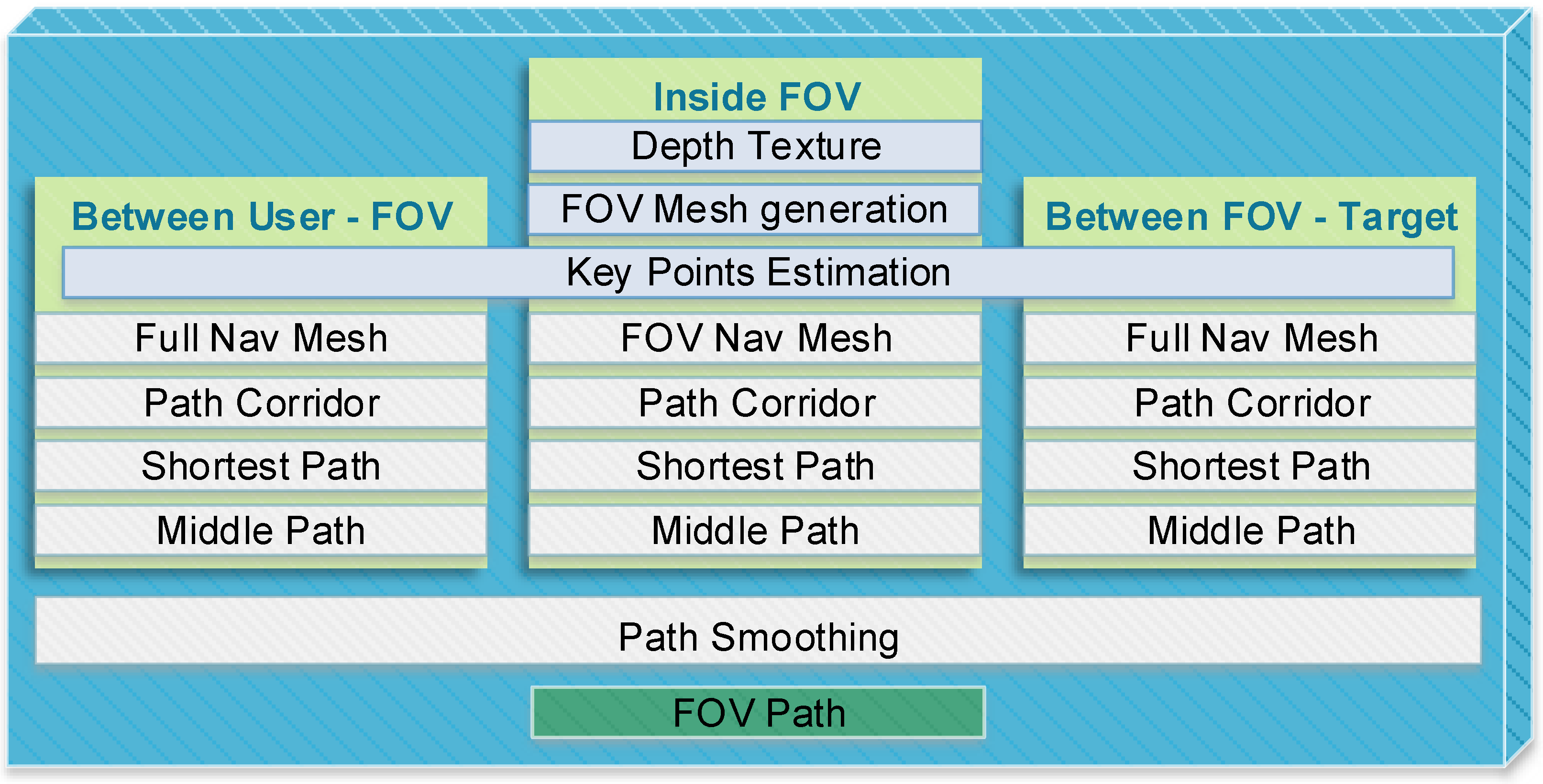
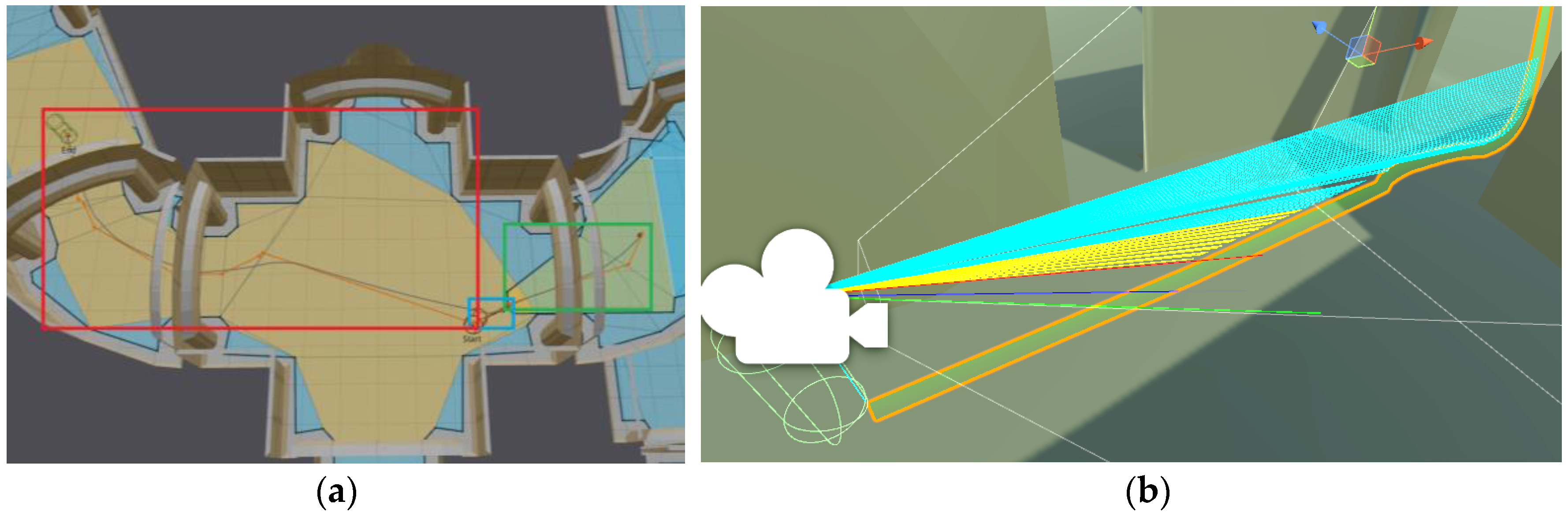
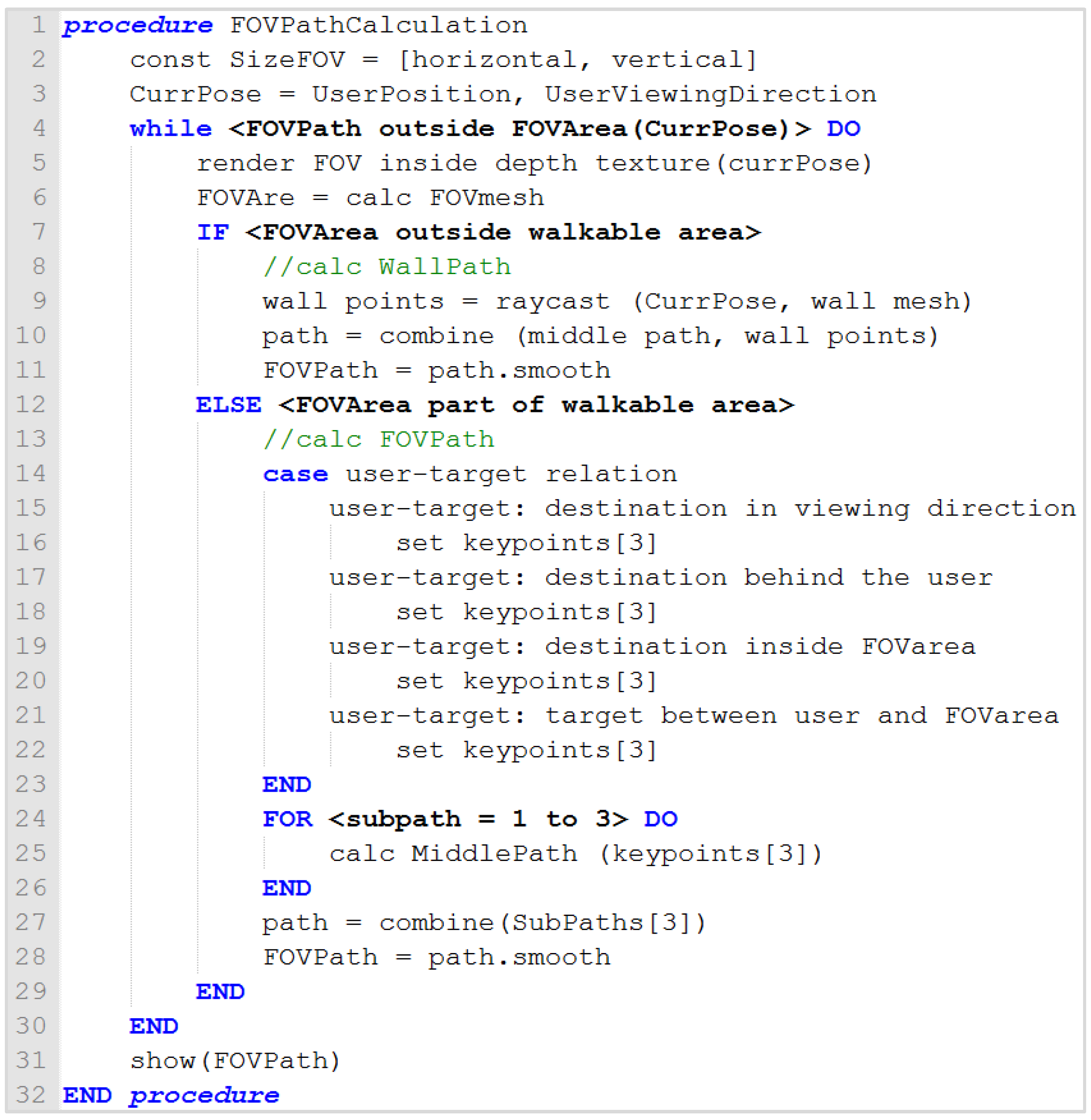
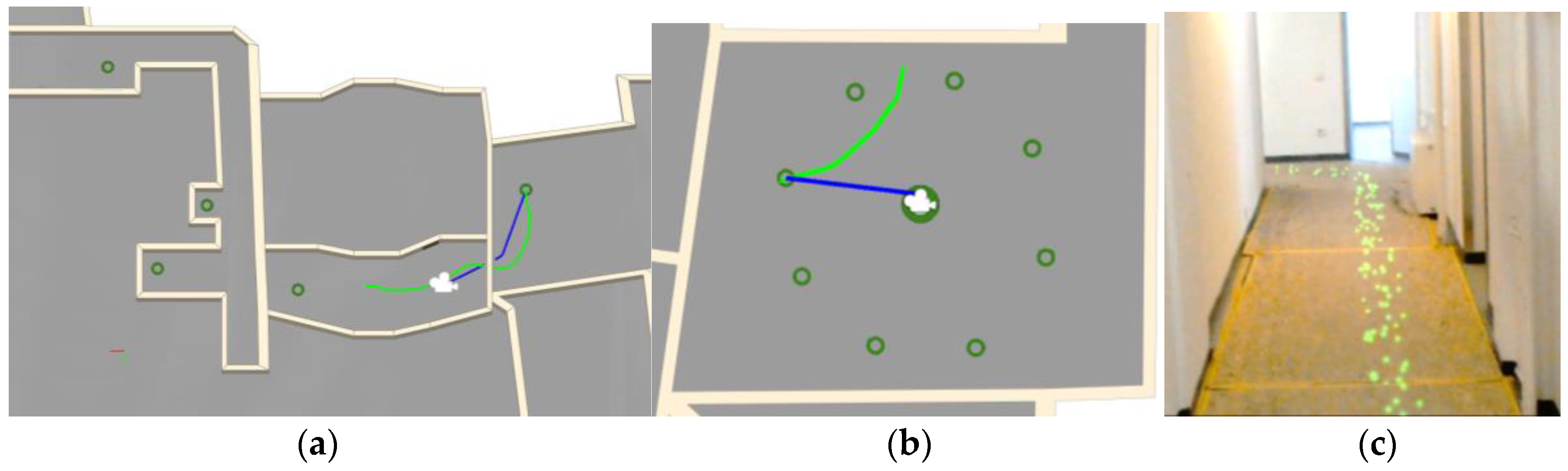
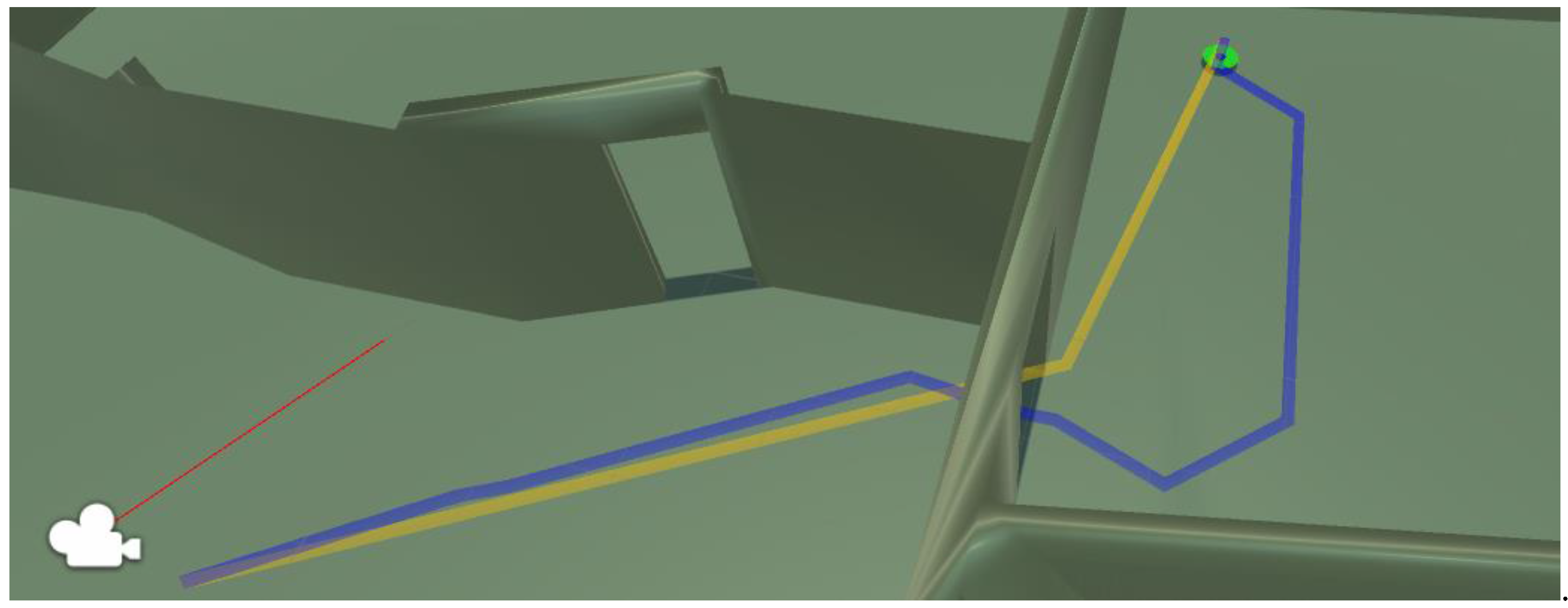
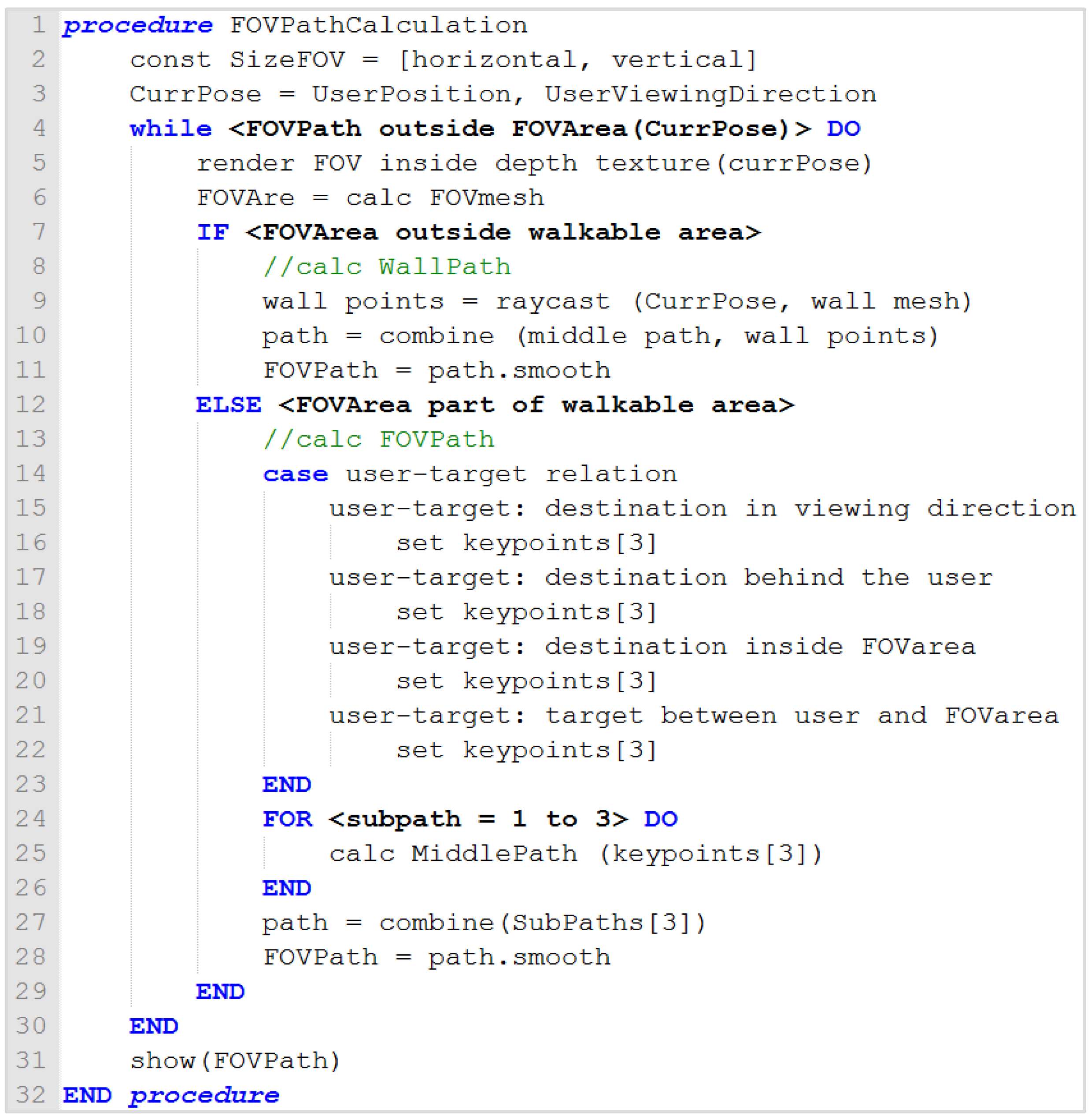
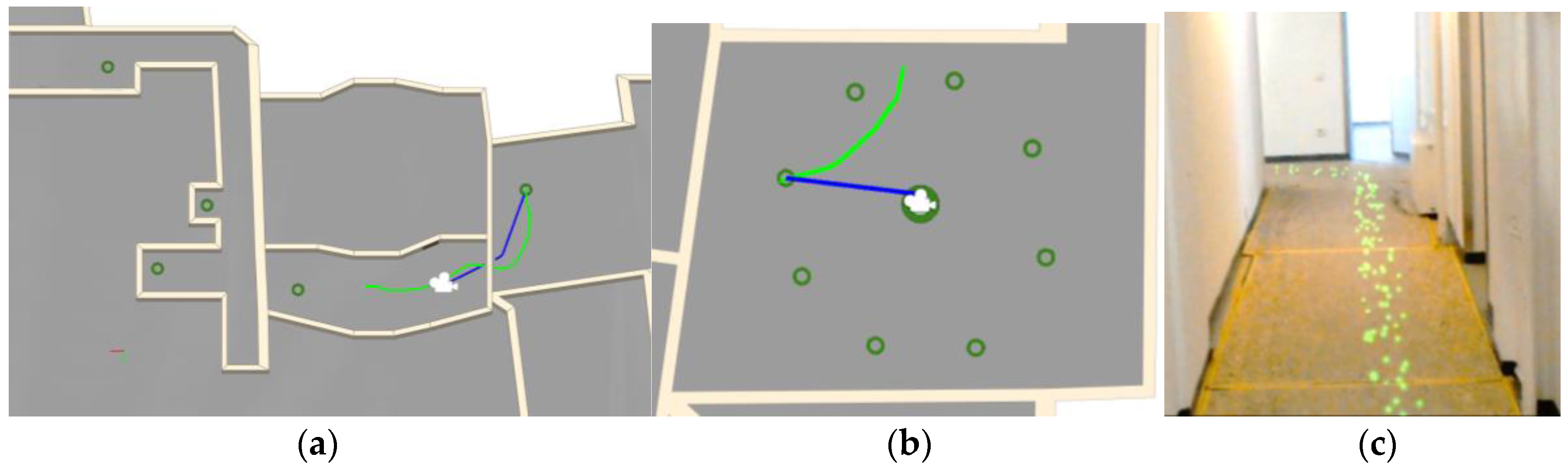
- The most common condition exists if the user is looking in direction of the shortest path (A*), which leads directly to the target, not considering the viewing direction. In this case, the Middle Path is calculated between the entry and exit point of the FOVNavMesh. This path is then combined with a Middle Path calculation between the exit point and the target and the position of the user and the entry point (see Figure 7a).
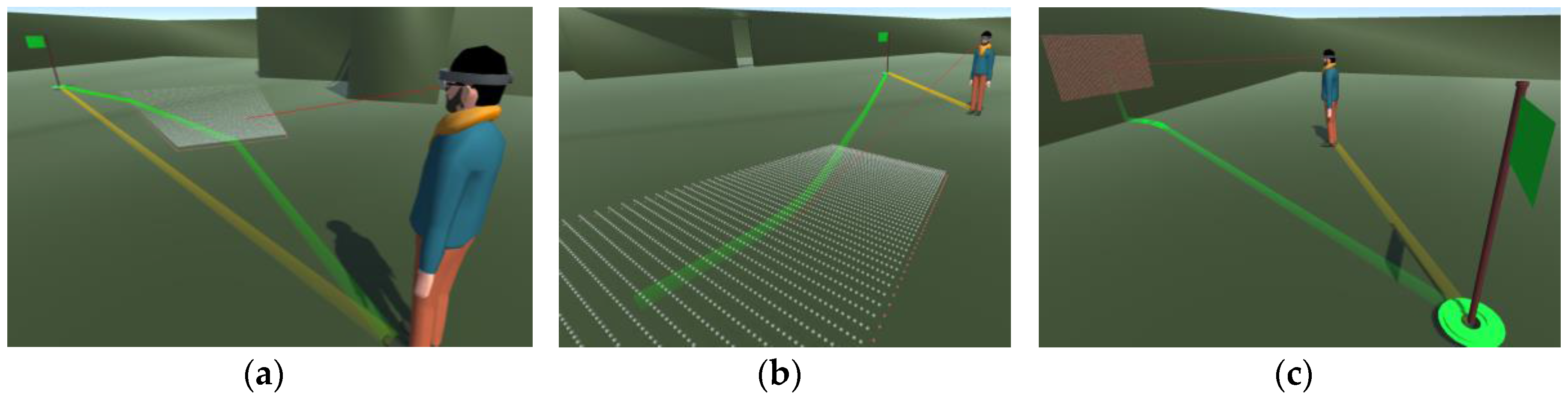
- If the user looks away from the shortest path, the path inside the FOV does not start at the entry point near the user, but at the center point of the FOV area towards the exit point. This thereby prevents the creation of a path in the shape of a loop (see Figure 7b). This calculation is triggered due to the angle between the viewing direction and the average direction of the first five points of the shortest path.
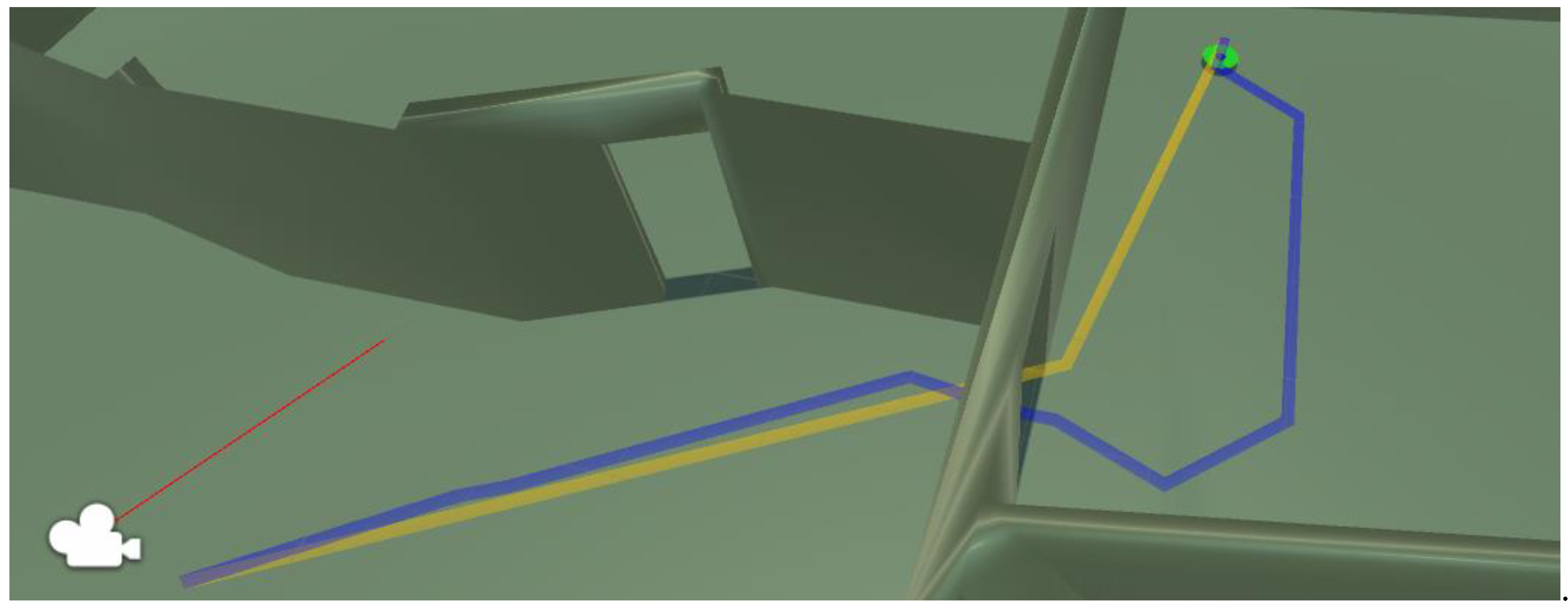
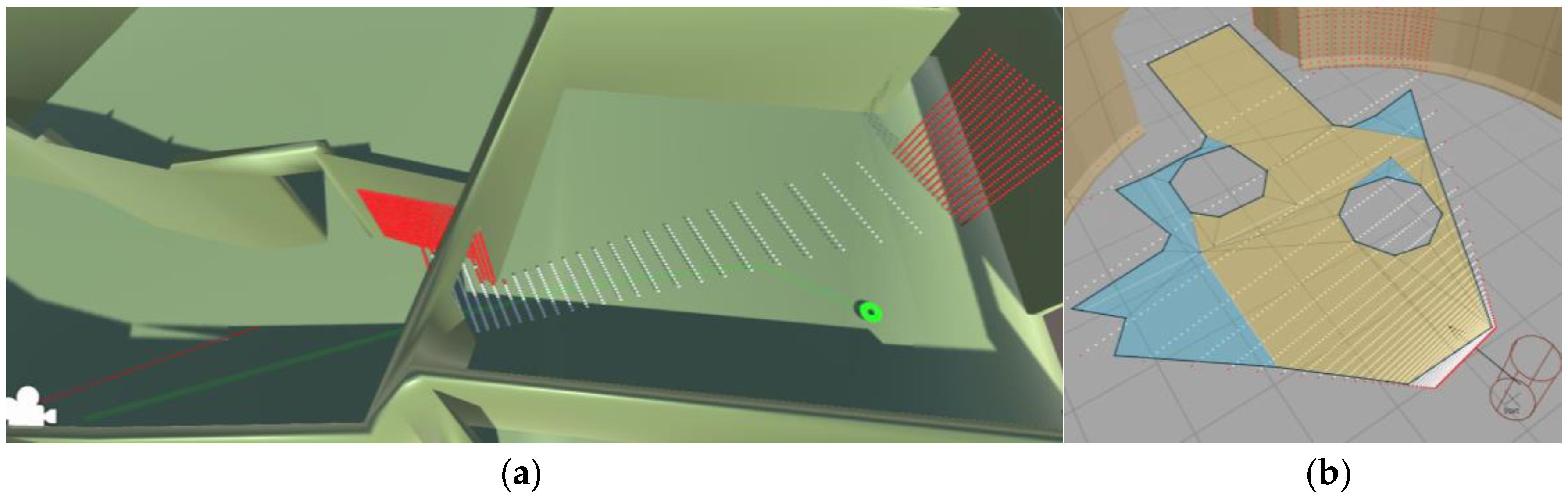
- In case the user is looking at a wall, where no navigation mesh is available, the authors designed the concept of a Wall Path. Figure 7c illustrates the outcome of this principle. It is necessary to generate a connection from the point the user is looking at towards a valid global path. Three points are defined before the Wall Path can be continued to the target. At first the point, where the center ray of the depth texture, representing the center of the FOV, hits an obstacle is calculated. This point is set as the first point of the new path. When projecting this point to the floor, the line between the projected point and the user’s position is calculated. The intersection point between this line and the edge of the navigation mesh is added as a second point of the path. A third point is added with a clearance distance to the wall and is also used as a starting point for a global path calculation.
- If the user is already close to the target, the destination could be inside the FOV area. In this case, the path is only calculated between the entry point and the target.
- The final situation appears when the user is walking towards the target and the FOV is already behind the target position. If this situation is detected by the algorithm, the center point of the FOV area is used as a starting point of the path. Additionally, the path shows the way towards the user.
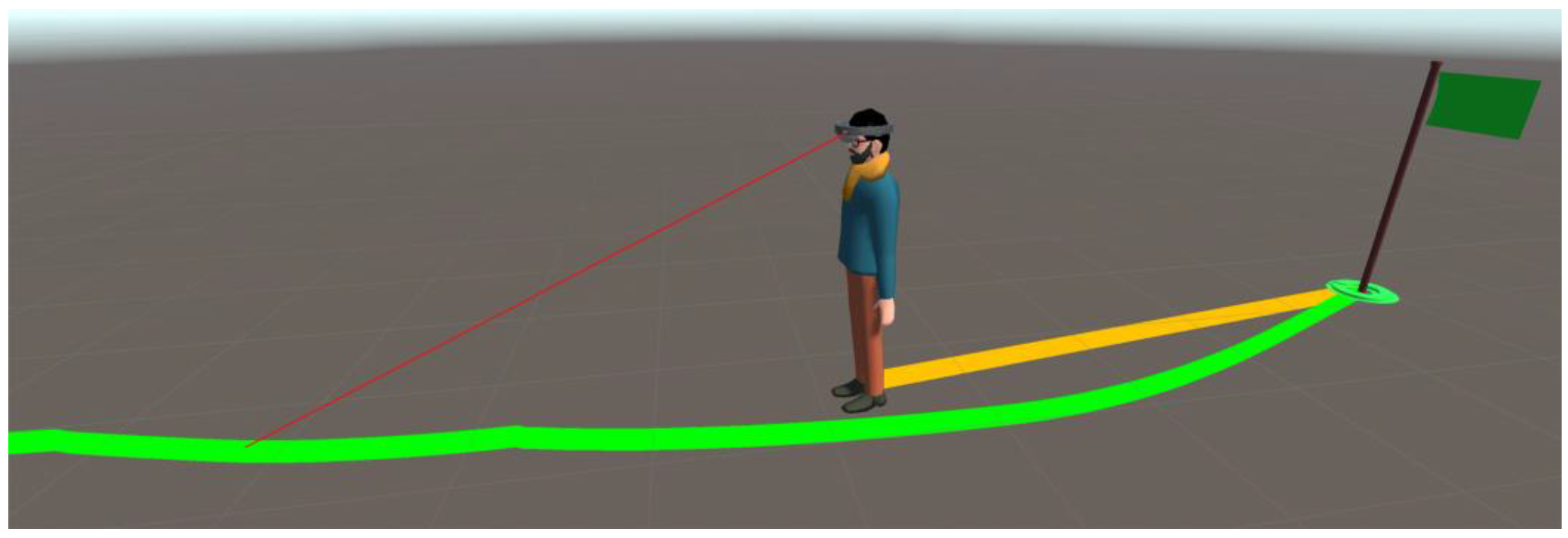
4.2.2. Guiding
5. Results
5.1. Technical Evaluation
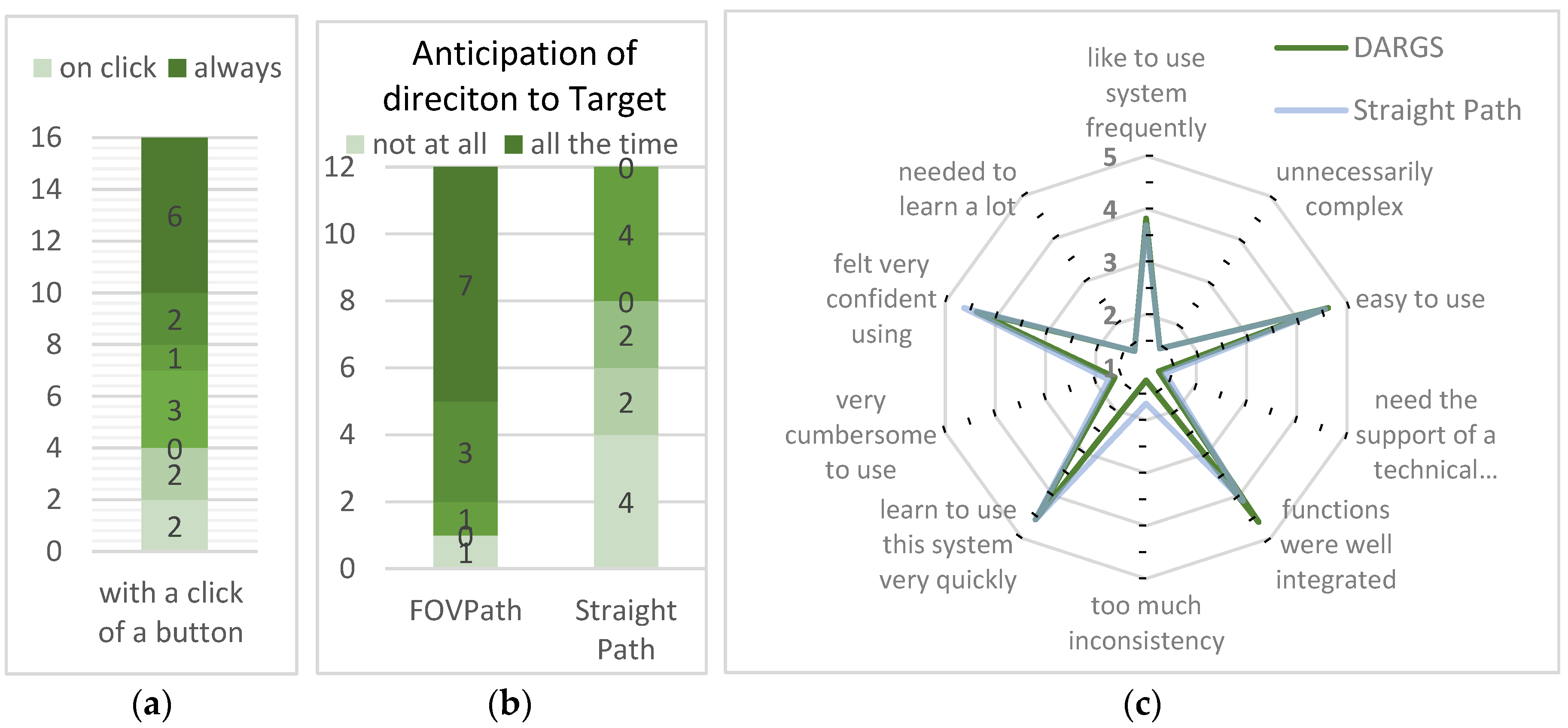
5.2. User Study
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Alnabhan, A.; Tomaszewski, B. INSAR. In Proceedings of the Sixth ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness (ISA ’14), Fort Worth, TX, USA, 4–7 November 2014; ACM: New York, NY, USA, 2014; pp. 36–43. [Google Scholar]
- Gerstweiler, G.; Vonach, E.; Kaufmann, H. HyMoTrack: A mobile AR navigation system for complex indoor environments. Sensors 2015, 16. [Google Scholar] [CrossRef] [PubMed]
- Snook, G. Simplified 3D Movement and Pathfinding Using Navigation Meshes. In Game Programming Gems; DeLoura, M., Ed.; Charles River Media: Newton Centre, MA, USA, 2000; pp. 288–304. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. Correction to “A Formal Basis for the Heuristic Determination of Minimum Cost Paths”. ACM SIGART Bull. 1972, 28–29. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Al Delail, B.; Weruaga, L.; Zemerly, M.J. CAViAR: Context aware visual indoor augmented reality for a University Campus. In Proceedings of the 2012 IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology Workshops (WI-IAT 2012), Macau, China, 4–7 December 2012; pp. 286–290. [Google Scholar]
- Kasprzak, S.; Komninos, A.; Barrie, P. Feature-based indoor navigation using augmented reality. In Proceedings of the 9th International Conference on Intelligent Environments, Athens, Greece, 16–17 July 2013; pp. 100–107. [Google Scholar] [CrossRef]
- Huey, L.C.; Sebastian, P.; Drieberg, M. Augmented reality based indoor positioning navigation tool. In Proceedings of the 2011 IEEE Conference on Open Systems (ICOS), Langkawi, Malaysia, 5–28 September 2011; pp. 256–260. [Google Scholar] [CrossRef]
- Reitmayr, G.; Schmalstieg, D. Location based applications for mobile augmented reality. In Proceedings of the Fourth Australasian User Interface Conference on User Interfaces 2003; Australian Computer Society, Inc.: Darlinghurst, Australia, 2003; pp. 65–73. [Google Scholar]
- Mulloni, A.; Seichter, H.; Schmalstieg, D. Handheld augmented reality indoor navigation with activity-based instructions. In Proceedings of the 13th International Conference on Human Computer Interaction with Mobile Devices and Services (MobileHCI ’11), Stockholm, Sweden, 30 August–2 September 2011; p. 211. [Google Scholar]
- Kim, J.; Jun, H. Vision-based location positioning using augmented reality for indoor navigation. IEEE Trans. Consum. Electron. 2008, 54, 954–962. [Google Scholar] [CrossRef]
- Möller, A.; Kranz, M.; Diewald, S.; Roalter, L.; Huitl, R.; Stockinger, T.; Koelle, M.; Lindemann, P.A. Experimental evaluation of user interfaces for visual indoor navigation. In Proceedings of the 32nd Annual ACM Conference on Human Factors in Computing Systems (CHI ’14), Toronto, ON, Canada, 26 April–1 May 2014; ACM Press: New York, NY, USA, 2014; pp. 3607–3616. [Google Scholar]
- Möller, A.; Kranz, M.; Huitl, R.; Diewald, S.; Roalter, L. A Mobile Indoor Navigation System Interface Adapted to Vision-based Localization. In Proceedings of the 11th International Conference on Mobile and Ubiquitous Multimedia (MUM ’12), Ulm, Germany, 4–6 December 2012; ACM: New York, NY, USA, 2012; pp. 4:1–4:10. [Google Scholar]
- Miyashita, T.; Meier, P.; Tachikawa, T.; Orlic, S.; Eble, T.; Scholz, V.; Gapel, A.; Gerl, O.; Arnaudov, S.; Lieberknecht, S. An augmented reality museum guide. In Proceedings of the 7th IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2008), Cambridge, UK, 15–18 September 2008; pp. 103–106. [Google Scholar]
- Rehman, U.; Cao, S. Augmented Reality-Based Indoor Navigation Using Google Glass as a Wearable Head-Mounted Display. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Kowloon, China, 9–12 October 2015; pp. 1452–1457. [Google Scholar]
- Wein, R.; Van Den Berg, J.P.; Halperin, D. The visibility-Voronoi complex and its applications. Comput. Geom. Theory Appl. 2007, 36, 66–87. [Google Scholar] [CrossRef]
- Kallmann, M. Shortest Paths with Arbitrary Clearance from Navigation Meshes. In Proceedings of the 2010 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Madrid, Spain, 2–4 July 2010; pp. 159–168. [Google Scholar]
- Kallmann, M. Dynamic and Robust Local Clearance Triangulations. ACM Trans. Graph. 2014, 33, 1–17. [Google Scholar] [CrossRef]
- Geraerts, R.; Overmars, M.H. The corridor map method: Real-time high-quality path planning. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1023–1028. [Google Scholar]
- Preparata, F.P. The Medial Axis of a Simple Polygon. In MFCS 1977: Mathematical Foundations of Computer Science 1977; Gruska, J., Ed.; Lecture Notes in Computer Science; Springer: New York, NY, USA, 1977; Volume 53, pp. 443–450. [Google Scholar]
- Van Toll, W.; Cook IV, A.F.; Geraerts, R. Navigation meshes for realistic multi-layered environments. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), San Francisco, CA, USA, 25–30 September 2011; pp. 3526–3532. [Google Scholar]
- Lee, J.; Ki-Joune, L.; Zlatanova, S.; Kolbe, T.H.; Nagel, C.; Becker, T. OGC IndoorGML. Draft Specification OGC; v.0.8.2; Open Geospatial Consortium Inc.: Wayland, MA, USA, 2014. [Google Scholar]
- Mikko Mononen Recast Library. Available online: https://github.com/recastnavigation/recastnavigation (accessed on 24 December 2017).
- Pavlidis, T. Algorithms for graphics and image processing. Proc. IEEE 1982, 301. [Google Scholar] [CrossRef]
- Ramer, U. An iterative procedure for the polygonal approximation of plane curves. Comput. Graph. Image Process. 1972, 1, 244–256. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or its Caricature. In Classics in Cartography: Reflections on Influential Articles from Cartographica; John Wiley & Sons: New York, NY, USA, 2011; pp. 15–28. ISBN 9780470681749. [Google Scholar]
- Likert, R. A technique for the measurement of attitudes. Arch. Psychol. 1932, 22, 55. [Google Scholar]
- Brooke, J. SUS—A quick and dirty usability scale. Usability Evaluation in Industy 1996, 189, 4–7. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage of the Algorithm | Path Length 50 m | FOV Size 10 m2 | ||
|---|---|---|---|---|
| FOV Size 20 m2 | FOV Size 120 m2 | Path Length 50 m | Path Length 160 m | |
| Path Corridor | 0.05 ms | 0.05 ms | 0.06 ms | 0.20 ms |
| Middle Path | 0.02 ms | 0.02 ms | 0.03 ms | 0.05 ms |
| Render FOV | 22.2 ms | 23.8 ms | 22.1 ms | 22.2 ms |
| Filter Floor Pixels | 0.27 ms | 0.09 ms | 0.12 ms | 0.1 ms |
| FOV NavMesh | 44.8 ms | 262.8 ms | 25.0 ms | 26.6 ms |
| FOV Path | 0.07 ms | 0.05 ms | 0.03 ms | 0.04 ms |
| Smooth FOV | 0.24 ms | 2.1 ms | 0.4 ms | 0.5 ms |
| Global Path | 0.10 ms | 0.08 ms | 0.12 ms | 0.4 ms |
| Global Smoothing | 19.4 ms | 14.6 ms | 17.9 ms | 159.9 ms |
| Full Runtime | 92.0 ms | 308.3 ms | 70.5 ms | 216.1 ms |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gerstweiler, G.; Platzer, K.; Kaufmann, H. DARGS: Dynamic AR Guiding System for Indoor Environments. Computers 2018, 7, 5. https://doi.org/10.3390/computers7010005
Gerstweiler G, Platzer K, Kaufmann H. DARGS: Dynamic AR Guiding System for Indoor Environments. Computers. 2018; 7(1):5. https://doi.org/10.3390/computers7010005
Chicago/Turabian StyleGerstweiler, Georg, Karl Platzer, and Hannes Kaufmann. 2018. "DARGS: Dynamic AR Guiding System for Indoor Environments" Computers 7, no. 1: 5. https://doi.org/10.3390/computers7010005
APA StyleGerstweiler, G., Platzer, K., & Kaufmann, H. (2018). DARGS: Dynamic AR Guiding System for Indoor Environments. Computers, 7(1), 5. https://doi.org/10.3390/computers7010005