1. Introduction
Traffic accidents remain a critical public safety concern, resulting in significant human and economic losses worldwide. According to the World Health Organization (WHO), more than 1.35 million people lose their lives in road accidents annually, with economic damages exceeding USD 800 billion in the United States alone. The increasing complexity of urban transportation systems, driven by rising population densities, evolving infrastructure, and unpredictable human behavior, necessitates advanced, data-driven solutions for improving traffic safety. Deep learning models, particularly Transformer architectures, have demonstrated remarkable performance in modeling sequential data [
1,
2,
3]. However, their effectiveness in real-world applications is often hindered by distribution shifts and class imbalance, two fundamental challenges that degrade prediction reliability [
4,
5].
Most existing traffic accident prediction models are trained on static datasets and struggle to generalize when deployed in dynamic, real-world scenarios. As a result, their predictions deteriorate under distribution shifts, where unseen environmental conditions lead to significant accuracy degradation. To address this, Test-Time Training (TTT) has been introduced, enabling Transformer-based models to dynamically refine their parameters during inferencing using self-supervised auxiliary tasks [
6]. This approach has shown success in various applications, such as handwritten document recognition, where an auxiliary branch continuously updates model parameters for enhanced adaptability [
7]. Recent advancements like Test-Time Self-Training (TeST) have further improved test-time adaptation by employing a student–teacher framework, allowing models to learn robust and invariant representations under distribution shifts [
8]. Comprehensive studies have emphasized the significance of TTT for handling such shifts across multiple domains [
9].
Traffic accident prediction models often struggle with class imbalance, where severe but infrequent accidents are underrepresented in training data, leading to biased predictions that favor more common, less severe events while failing to recognize high-risk scenarios [
5,
10]. An analysis of the dataset in this paper reveals a highly skewed long-tail distribution of accident severity, as illustrated in
Figure 1. The data show that moderate accidents (Level 2) constitute 79.6% of all cases, whereas severe accidents (Level 4) represent only 2.6%. The maximum-to-minimum imbalance ratio is as high as 93.2:1, highlighting the extreme disparity between frequent minor incidents and rare but critical severe accidents. To further characterize the Severity (levels 1–4) distribution and rule out any inadvertent train–test shifts, we computed skewness, kurtosis, and Jensen–Shannon divergence on the labels in both splits, as summarized in
Table 1. These statistics confirm that the training and testing severity labels share virtually identical higher-order moments (JS divergence ≈ 0.00085), indicating that the imbalance challenge stems from the inherent long-tail distribution rather than any split mismatch. This imbalance causes conventional models to prioritize majority classes, resulting in poor recall and frequent misclassification of severe accidents—the most critical category for traffic safety interventions [
11,
12]. Addressing this issue requires models that can adapt to the underlying distribution shifts while ensuring fair representation of minority accident types.
Previous studies address this challenge using Recurrent Neural Networks (RNNs) and Long Short-Term Memory (LSTM) networks, which improved temporal modeling but suffered from vanishing gradient issues and failed to capture long-range dependencies effectively [
13]. The emergence of Transformer models revolutionized sequence modeling by leveraging self-attention mechanisms, enabling better long-term dependency modeling in compared to RNNs and LSTMs [
2,
14]. However, even Transformer-based models remain vulnerable to class imbalance, leading to biased predictions toward frequent accident categories [
5,
11,
15].
Recent advancements in self-supervised learning and adaptive training provide promising solutions to addressing distribution shifts and class imbalance [
5,
6,
16]. While Test-Time Training (TTT) has demonstrated significant potential to dynamically adapt models during inferencing, the existing research has mainly focused on structured environments and standard classification tasks, with limited exploration of real-time traffic accident prediction [
16,
17,
18]. To date, there is no unified framework explicitly integrating TTT with advanced memory mechanisms, multi-scale feature extraction, and class-imbalance-aware strategies tailored specifically to traffic accident severity prediction. Such integration is crucial, as existing models continue to struggle to accurately differentiate between frequent minor accidents and rare, severe cases, resulting in biased predictions and insufficient recall on critical accident scenarios [
5,
11,
15]. Therefore, there is still an open research gap regarding a comprehensive approach that simultaneously addresses these challenges.
It should be noted that this study focuses on predicting the severity level of reported accidents rather than forecasting accident occurrences. This formulation is consistent with prior work on probabilistic risk modeling and supports more actionable safety interventions based on the severity of traffic incidents.
To address these challenges, in this paper, we introduce a unified Transformer-based framework that incorporates Test-Time Training (TTT) as the core adaptation mechanism for traffic accident severity prediction. TTT dynamically refines model parameters during inferencing, improving real-time adaptability and robustness to distribution shifts. Additionally, we integrate an Adaptive Memory Layer (AML) to retain long-term dependencies [
19,
20] and a Feature Pyramid Network (FPN) to enhance multi-scale feature extraction [
21,
22]. To specifically mitigate class imbalance, the proposed model combines Class-Balanced Attention (CBA), class-weighted cross-entropy, Focal Loss, and SMOTE-based oversampling [
15,
23]. Unlike prior approaches, in which these strategies are treated independently, our cohesive architecture simultaneously addresses distribution shifts and class imbalance at t data level, loss level, and model level. Our experimental results and ablation studies confirm that our model achieved significant improvements in robustness, inference efficiency, and recall for severe and rare accident scenarios, highlighting its suitability for real-time intelligent transportation systems.
2. Materials and Methods
We designed our study according to a structured methodology inspired by established workflows used in traffic accident prediction and machine learning research [
1,
24], aiming to develop a scalable and adaptive prediction framework. Specifically, our approach integrates deep learning models within a systematic workflow to enhance predictive performance. The subsequent subsections detail our research design, data-processing pipeline, model architecture, training procedures, evaluation metrics, and ablation studies conducted to assess the contributions of the different components of the model.
2.1. Data Collection
The dataset, sourced from Kaggle (DOI:10.34740/kaggle/ds/199387, available at
https://www.kaggle.com/datasets/sobhanmoosavi/us-accidents/data (accessed on 1 January 2025)), comprises traffic accident records from 49 states across the United States, spanning the years 2016 to 2023. A subset of 500,000 records was selected for model training and evaluation; these records included information on meteorological conditions, traffic density, road types, and accident severity. Accident severity, the target variable, is categorized into four levels: minor (minimal impact), moderate (traffic delays without major disruption), severe (significant congestion and possible injuries), and extreme (major disruptions with serious injuries or fatalities). As illustrated in
Figure 1, the dataset exhibits a highly imbalanced distribution, where moderate accidents dominate, while severe and extreme cases are significantly underrepresented. This predefined classification serves as the foundation for training models to distinguish varying levels of accident severity.
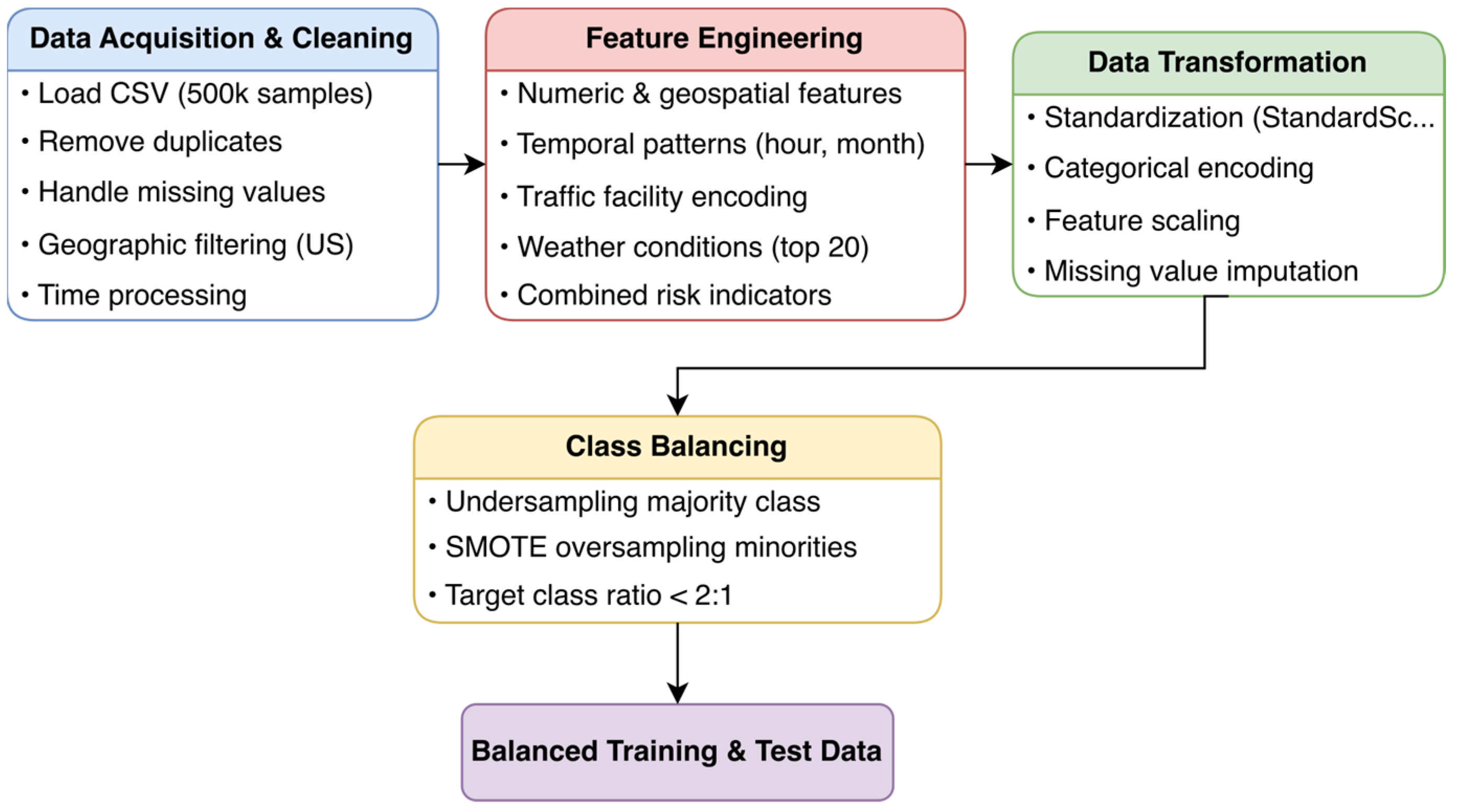
2.2. Data Preprocessing
A structured data pre-processing pipeline was developed to ensure consistency and enhance predictive performance. The features with more than 30% missing values were removed, while those with lower missing rates were imputed using mean or median values. To improve feature representation, temporal attributes such as hour, weekday/weekend, and seasonality were extracted to capture variations in accident risk, while geospatial factors, including proximity to highways, intersections, and traffic signals, were incorporated to identify accident hotspots. Interaction terms, such as temperature–visibility and humidity–wind speed, were introduced to account for environmental dependencies. Numerical attributes were standardized using Min–Max Scaling, and categorical variables, including weather conditions and accident locations, were encoded using one-hot encoding to prevent artificial ordinal relationships. Additionally, composite features, such as traffic density and weather impact scores, were derived to better capture patterns associated with accident severity. The complete pre-processing workflow, covering data cleaning, feature engineering, standardization, and class balancing, is illustrated in
Figure 2.
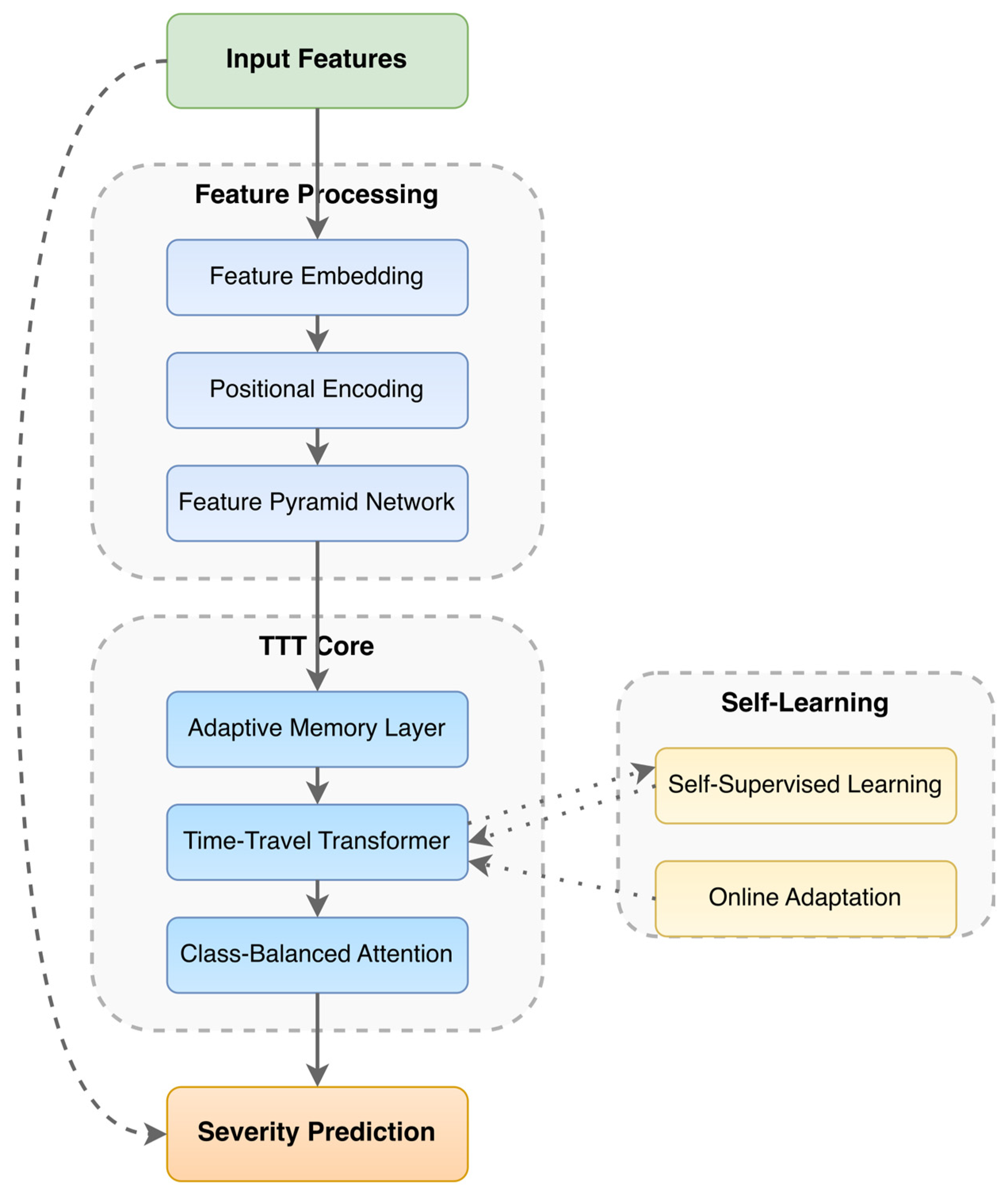
2.3. Model Architecture
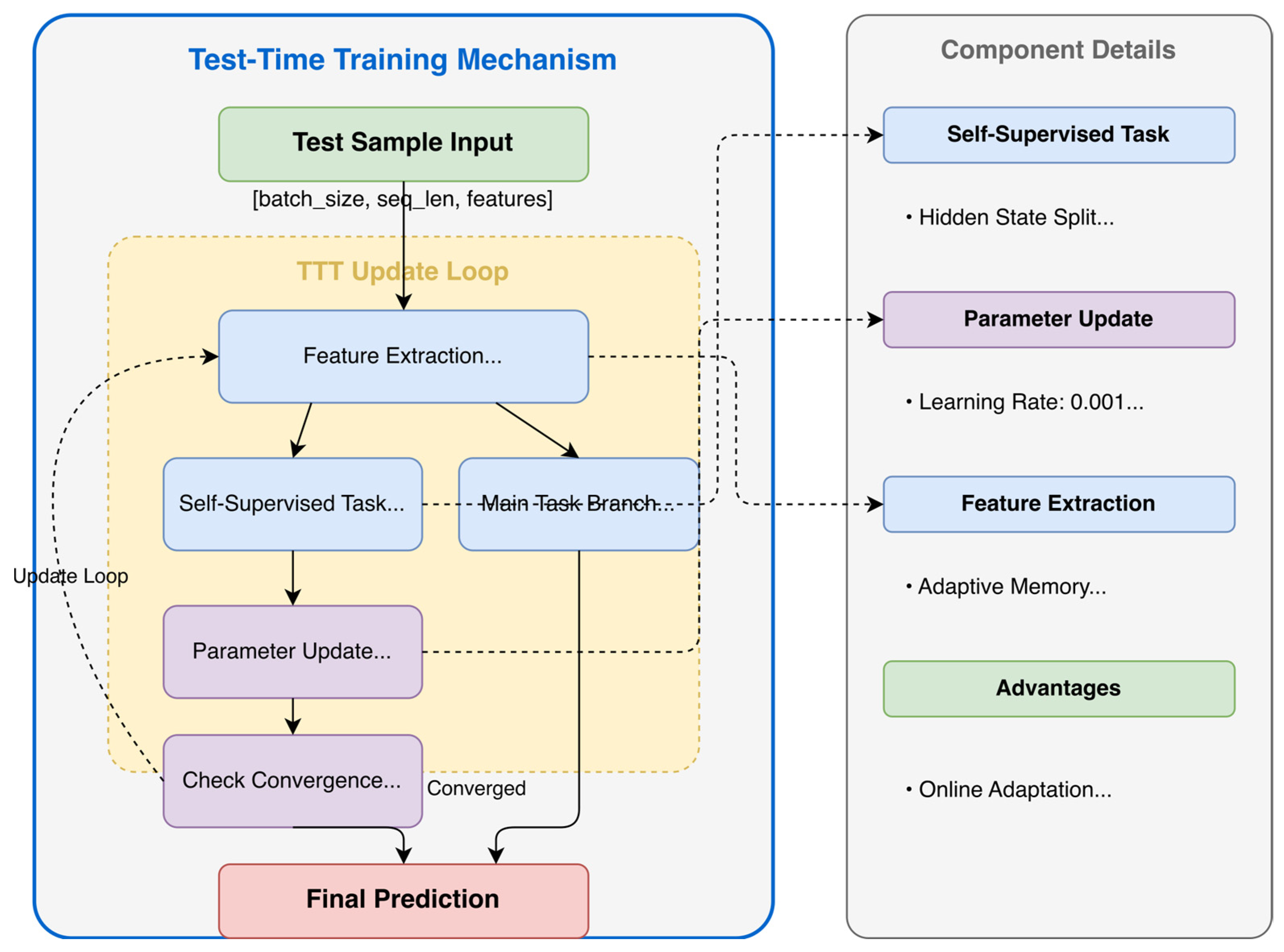
The proposed model extends the baseline Transformer by incorporating multi-scale feature extraction, adaptive memory, and TTT, as shown in
Figure 3. It consists of four key components: Feature Pyramid Network (FPN) for capturing hierarchical traffic patterns, Adaptive Memory Layer (AML) for retaining long-term dependencies, Class-Balanced Attention (CBA) for mitigating class imbalance, and TTT for real-time adaptation.
2.3.1. Multi-Scale Representation Learning via Feature Pyramid Network (FPN)
Traffic patterns exhibit hierarchical structures, wherein localized accident features interact with broader contextual influences. Standard Transformer models operate at a fixed resolution, potentially overlooking critical multi-scale dependencies. To address this limitation, a Feature Pyramid Network (FPN) is integrated to aggregate features across multiple spatial and temporal resolutions [
21,
25,
26].
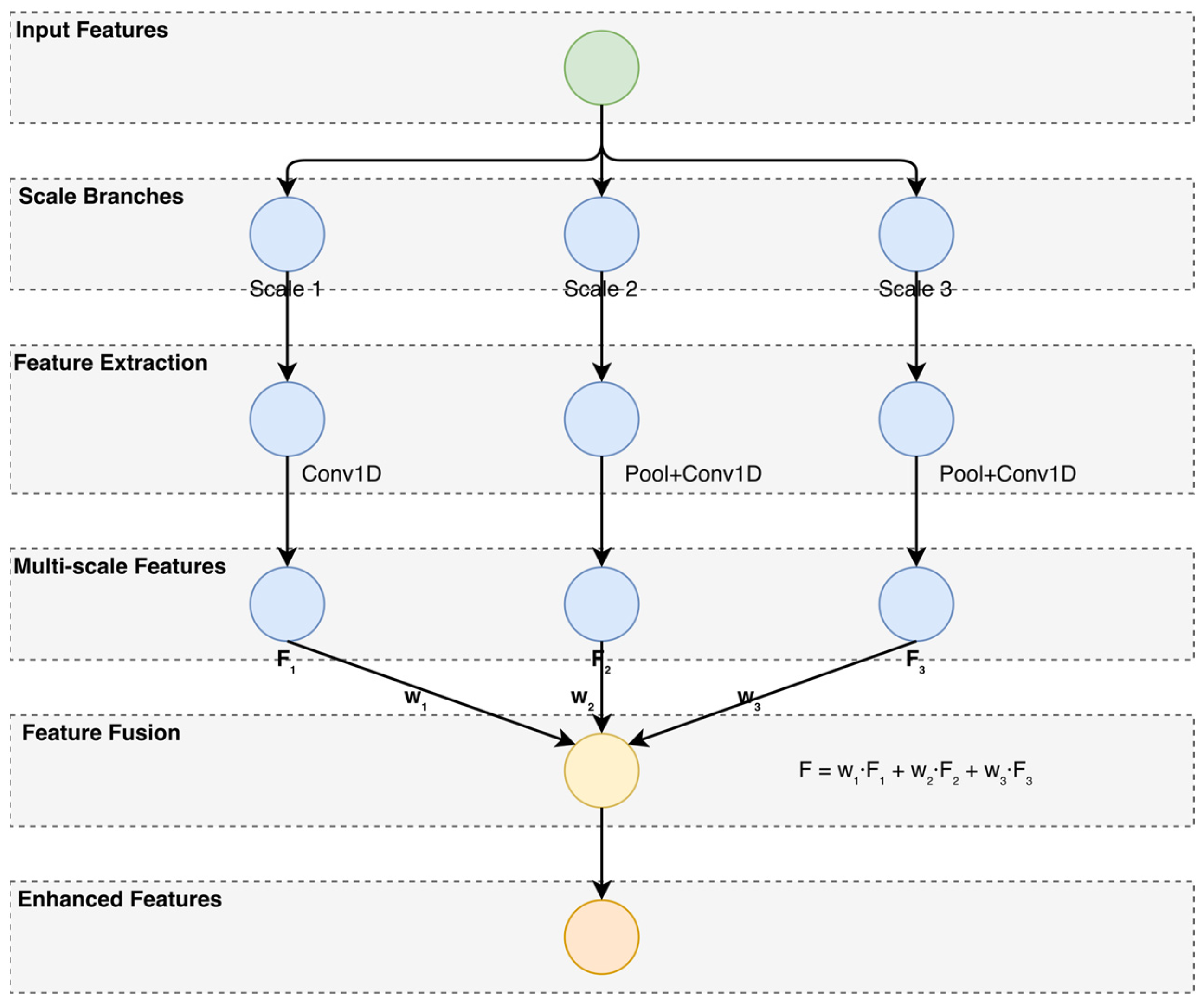
An FPN processes input feature maps at different scales—small, medium, and large—capturing both fine-grained accident characteristics and broader traffic patterns. Given an input feature map
at three different scales
,
, and
, the fused representation is computed as
where
,
, and
are learnable attention weights. Each scale-specific feature map is processed through 1D Convolutional Layers to refine temporal dependencies, enabling the model to retain both fine-grained and high-level accident patterns.
Figure 4 presents the detailed structure of the Feature Pyramid Network (FPN) used in this study.
2.3.2. Adaptive Memory Layer (AML) for Long-Term Dependency Modeling
Standard Transformers struggle to maintain long-term dependencies due to their fixed-length context windows, constituting a particularly problematic shortcoming for traffic accident prediction, where past incidents influence future risks [
3,
19,
20]. To address this, an Adaptive Memory Layer (AML) introduces an external memory module that dynamically retains and updates contextual information, ensuring that historical patterns are effectively incorporated into inferencing [
19,
20]. At each timestep
, the memory state
is updated recursively to maintain temporal continuity:
where
is a learnable decay factor that controls the balance between retaining past memory and incorporating new information, while
is a non-linear transformation extracting key accident-related features from the current input
.
where
and
are trainable parameters that determine which memory components are most relevant. The attention weight
selectively emphasizes critical historical patterns while filtering out less significant information [
20].
Unlike standard self-attention, which primarily captures short-range dependencies [
3], the proposed Adaptive Memory Layer (AML) is designed to maintain a dedicated memory state so that essential historical information remains accessible during inferencing [
19]. The learnable decay
allows the model to adapt dynamically to traffic conditions, balancing recent and historical accident data [
27,
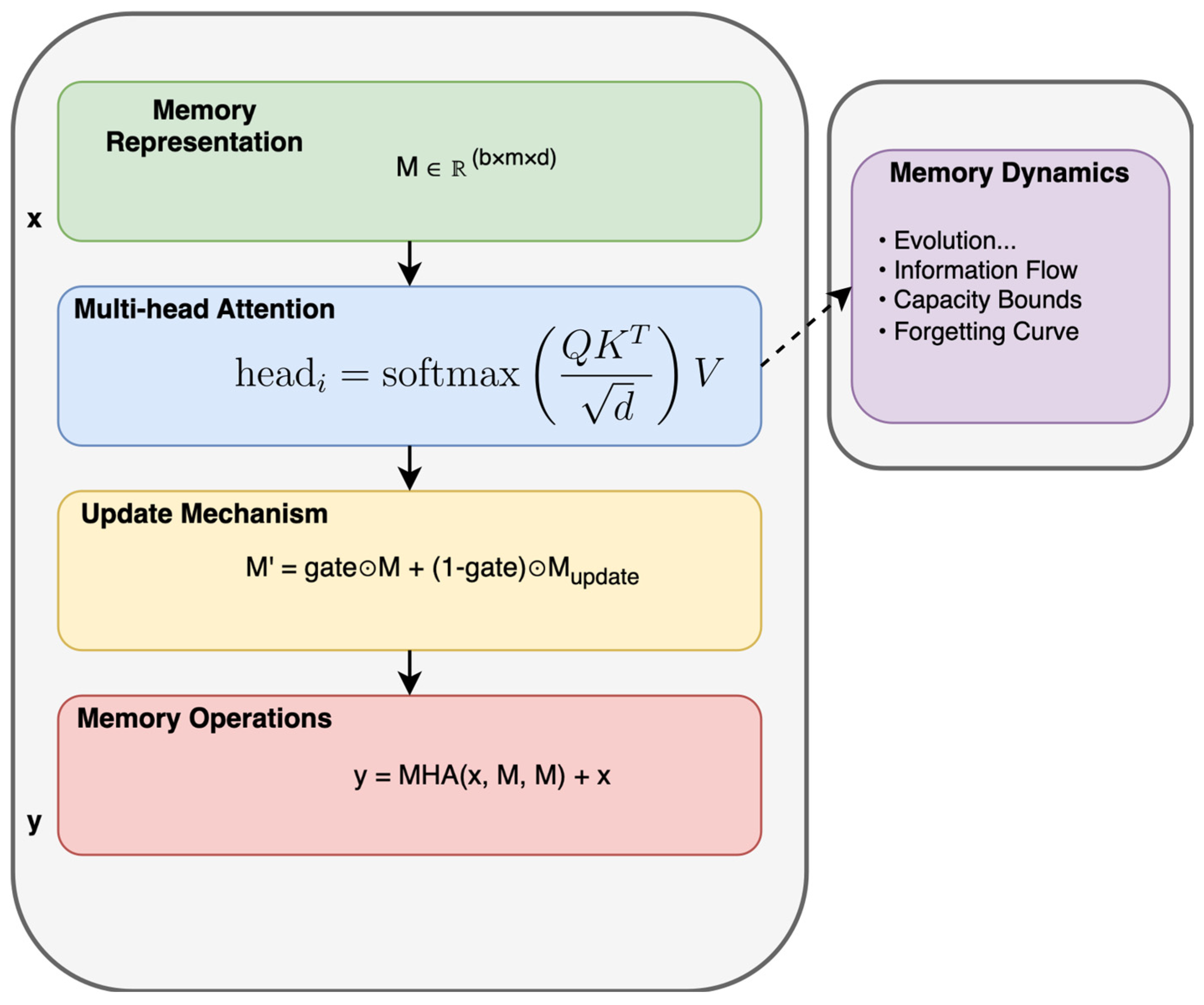
28]. We expect this mechanism will help the model recognize recurring traffic patterns and potentially improve prediction reliability, especially in accident-prone areas, where past incidents can offer useful predictive cues.
Figure 5 depicts the AML architecture, including its three key components—Memory Representation, Multi-Head Attention for Retrieval, and the Memory Update Mechanism [
19,
20,
29].
2.3.3. Class-Balanced Attention (CBA) for Class Imbalance Mitigation
Accident severity levels exhibit a long-tail distribution (
Figure 1), where severe accidents are significantly underrepresented [
30]. Conventional Transformers tend to focus on frequent accident types, leading to biased predictions. To counteract this, we introduce Class-Balanced Attention (CBA), which dynamically adjusts attention weights based on class importance [
23]. For each accident class
, the attention weight is computed as
where
is the learnable class importance weight, and
is the total number of classes. This formulation ensures that underrepresented accident categories receive more attention, thereby improving the model’s robustness against class imbalance [
15]. The computed attention weights
are then applied in the Transformer decoder to reweight accident severity predictions, ensuring that the model focuses adequately on severe accidents despite their lower rates of occurrence.
2.3.4. Test-Time Training (TTT) for Online Adaptation
Deep learning models often fail to adapt to dynamic traffic conditions due to their reliance on static training data [
6,
16]. Traditional Transformers assume a fixed data distribution, making them vulnerable to distribution shifts in real-world traffic scenarios. Test-Time Training (TTT) addresses this challenge by enabling real-time model updates through an auxiliary self-supervised learning (SSL) task [
8,
9]. Unlike conventional models, which remain unchanged after training, TTT continuously refines model parameters during inferencing, mitigating distribution shifts and enhancing predictive robustness [
18]. The optimization objective consists of classification loss
and self-supervised loss
, encouraging better generalization beyond the training set [
16]:
During inferencing, the model continuously refines its parameters based on incoming traffic data:
where
is the adaptive learning rate,
represents the current accident data input, and
denotes the Transformer’s parameters [
8]. This iterative update mechanism enables continuous adaptation to evolving traffic patterns, ensuring robustness in highly dynamic environments. To further enhance adaptability, TTT prioritizes recent accident data, adjusting feature importance weights as follows:
where
is the learning rate for feature weight updates [
16]. This ensures the model focuses on the most relevant and time-sensitive accident indicators while filtering outdated information.
Additionally, TTT integrates an online memory retention mechanism, allowing the model to store and retrieve historical accident patterns [
29]. By leveraging this memory, the model improves predictive accuracy in non-stationary environments where traffic risks evolve over time [
25].
Figure 6 illustrates the TTT framework, detailing the interaction between self-supervised learning, online parameter updates, and memory-based adaptation. The diagram highlights how the Transformer encoder, in conjunction with a self-supervised prediction module, iteratively refines model parameters until convergence, ensuring optimal real-time adaptation [
6,
16]. For reproducibility, the pseudocode of the proposed method is provided in
Appendix A (Algorithm A1).
2.3.5. Loss Function for Imbalanced Classification
In real-world accident data, severe accidents (Levels 3 and 4) are underrepresented. Traditional loss functions treat all samples equally, leading to a bias toward majority classes (minor accidents) [
5,
11,
15]. This model adopts Focal Loss, defined as follows:
where
is a class-dependent weighting factor,
is the model’s predicted probability for the correct class, and
is the focusing parameter, which reduces the impact of well-classified examples.
2.4. Our Experiments
To rigorously assess the effectiveness of the proposed TTT-Enhanced Transformer, a comprehensive experimental evaluation was conducted. In these experiments, we compared the proposed approach against existing models, investigated the contribution of key components through ablation studies, and analyzed performance using multiple evaluation metrics [
6,
16,
31].
2.4.1. Baseline Model Comparisons
The evaluation framework includes multiple baselines for comparison. A Long Short-Term Memory (LSTM) network was selected due to its strong ability to model temporal dependencies in sequential data [
32,
33,
34], serving as a traditional deep learning benchmark. Additionally, we implemented a Standard Transformer baseline to quantify the impact of our proposed enhancements [
1,
2,
14]. To ensure this baseline was sufficiently competitive, we applied a comprehensive three-step class imbalance mitigation pipeline comprising (i) random undersampling of the majority class (Severity 2), (ii) SMOTE-based oversampling of minority classes (Severities 1, 3 and 4), and (iii) cost-sensitive training using class-weighted cross-entropy loss with label smoothing. This setup ensures that the baseline addresses class imbalance at the data level, loss level, and training strategy level, providing a strong foundation for fair comparison with our TTT-Enhanced framework.
To further isolate the contributions of each individual mitigation technique, we introduced two additional variants: Transformer + Only SMOTE, which applies synthetic oversampling without undersampling or weighted loss [
5], and Transformer + Only Class-Weighted CE, which implements cost-sensitive learning without data-level balancing [
35]. These ablation models help quantify the incremental benefit of each component.
In addition, we compare the results against those obtained using TabM, a recent state-of-the-art tabular deep learning architecture designed for structured data [
36]. All models are evaluated using standard metrics such as overall accuracy, weighted precision, weighted recall, and weighted F1-score [
11,
12].
2.4.2. Ablation Studies
Ablation studies were conducted to quantify the contribution of individual components and training strategies within the proposed TTT-Enhanced Transformer [
18,
31]. In addition to systematically removing key modules—such as Test-Time Training (TTT), Adaptive Memory Layer (AML), Feature Pyramid Network (FPN), Class-Balanced Attention (CBA), and Focal Loss—we included two additional configurations to assess the isolated impact of CBA under data imbalance conditions, specifically without applying any sampling methods. All ablation variants were trained and evaluated under consistent experimental settings to enable fair comparison.
2.4.3. Evaluation Metrics
The performance of all models is assessed using multiple evaluation metrics to ensure a comprehensive understanding of predictive capabilities [
6,
29]. Overall accuracy measures the proportion of correct predictions [
6,
37], while weighted precision accounts for class imbalance by ensuring performance is evaluated fairly across different accident severity levels [
5]. Weighted recall evaluates a model’s ability to correctly identify severe accidents, adjusting for class imbalance [
5,
11]. The weighted F1-score, as the harmonic mean of precision and recall, ensures there is a balanced assessment of model performance across different severity levels [
5,
11]. The ROC-AUC score provides insight into a model’s discrimination ability across multiple severity categories [
11,
12]. A confusion matrix further analyzes classification errors and misclassifications, highlighting the challenges posed by imbalanced accident severity distributions [
5].
3. Results
The experimental results provide a comprehensive evaluation of the TTT-Enhanced Transformer, demonstrating its superior performance compared to traditional deep learning models. The model’s effectiveness is assessed through a comparison with baseline architectures, a detailed analysis of classification accuracy across accident severity levels, and an ablation study to quantify the contributions of key components.
3.1. Model Performance Comparison
To comprehensively evaluate the effectiveness of the proposed TTT-Enhanced Transformer, we compared its performance against several baseline models and the recent state-of-the-art (SOTA) TabM architecture.
As shown in
Table 2, the TTT-Enhanced Transformer consistently outperforms all baseline and comparison models across every evaluation metric. Compared to the LSTM baseline, which suffers from limited temporal modeling capabilities and heightened sensitivity to class imbalance (overall accuracy: 0.4798, F1-score: 0.55), the TTT-Enhanced Transformer achieved substantial improvements—particularly in recall (0.96 vs. 0.47)—demonstrating its effectiveness in identifying rare and severe accident cases [
5,
33].
The Transformer (Undersampling + SMOTE + Weighted CE) performed markedly better than LSTM due to its superior sequence modeling and multi-level class imbalance handling (overall accuracy: 0.9120, F1-score: 0.92), yet it lacks adaptation during inferencing time, making it vulnerable to real-world distributional shifts [
3,
5,
17]. The ablated variants—Transformer + Only SMOTE and Transformer + Only Class-Weighted CE—exhibited partial improvements but fell short of the balanced performance achieved by the full imbalance-aware baseline, which yielded the highest F1-score (0.920) among all Transformer-only configurations [
5].
TabM, a recent state-of-the-art tabular deep learning model, performed competitively (F1-score: 0.93) [
36]. However, its lack of temporal modeling and test-time adaptation limits its generalization capability under dynamic traffic conditions [
16,
17].
In contrast, the proposed TTT-Enhanced Transformer synergistically combines Focal Loss [
15] and class-balanced attention [
23] to address class imbalance, while employing memory-augmented encoding [
19,
20] and test-time training [
6,
7,
8,
16] to dynamically refine predictions during inferencing. This holistic design—spanning data-, loss-, and model-level strategies—enabled the model to achieve the highest overall accuracy, recall, and F1-score, particularly excelling in high-risk, low-frequency accident scenarios.
These findings strongly suggest that robust and generalizable performance in traffic accident severity prediction is best achieved through the integrated use of imbalance-aware learning techniques and real-time test-time adaptation [
5,
11,
15,
16,
17].
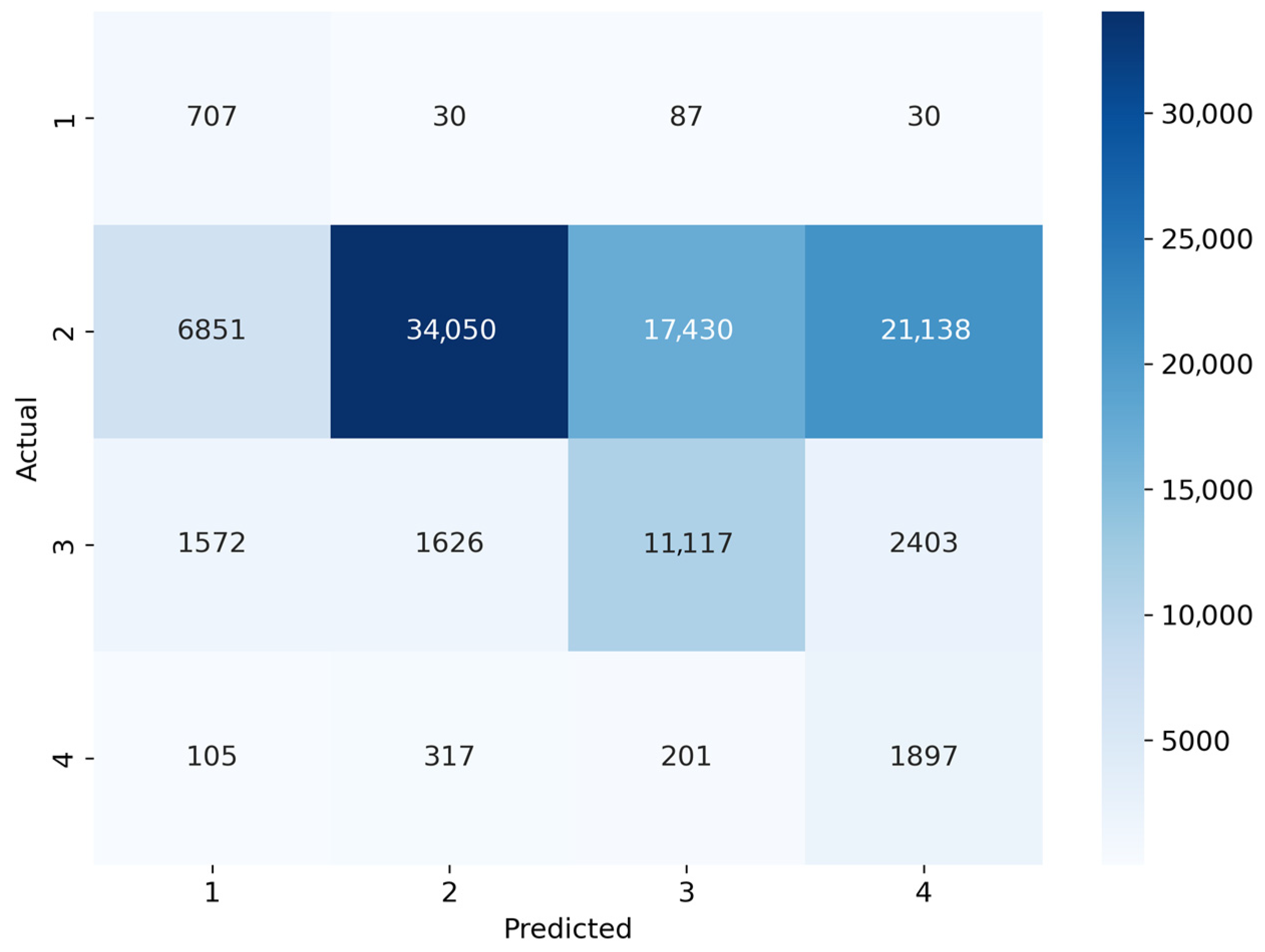
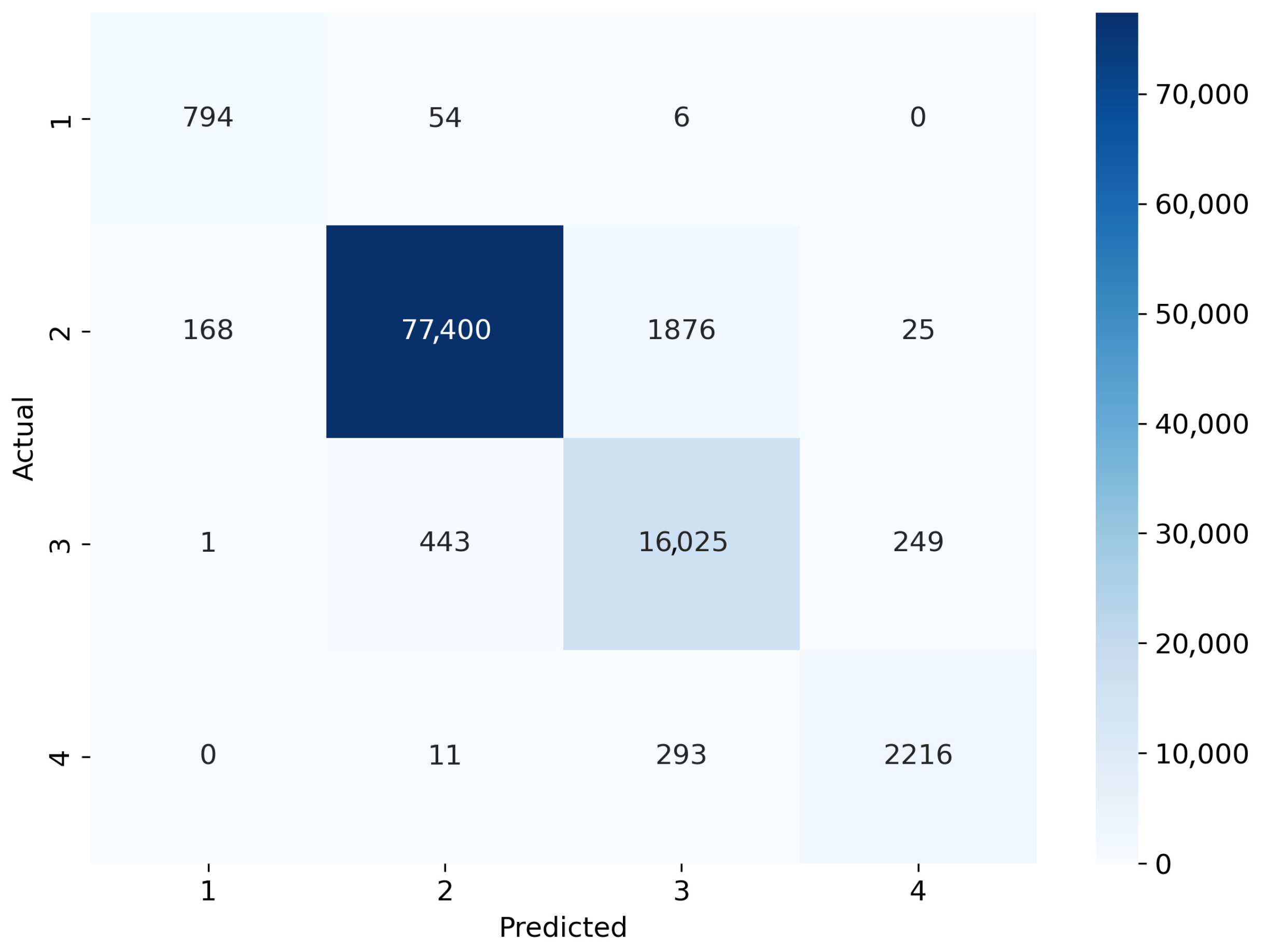
A more granular analysis of class-wise performance confirmed the effectiveness of adaptive learning mechanisms in improving prediction accuracy across all severity levels. The results of the confusion matrix analysis, as shown in
Figure 7,
Figure 8 and
Figure 9, illustrate the classification behavior of the three models. LSTM misclassified a significant proportion of moderate accidents (Level 2) as minor incidents, indicating its limitations in distinguishing subtle severity variations. The Standard Transformer exhibited improved classification stability but still struggled with identifying severe and extreme accident cases, resulting in higher false-negative rates in these categories. In contrast, the TTT-Enhanced Transformer achieved the most balanced classification, as evidenced by the higher diagonal values in the confusion matrix, indicating improved accuracy across all severity levels.
A comparison of the performance for underrepresented severe accident classes is summarized in
Table 3. The TTT-Enhanced Transformer maintained high accuracy for minor accidents (92.9%), achieved best-in-class performance for moderate accidents (97.4%), and yielded significantly improved severe (95.8%) and extreme accident prediction (87.9%). The improved performance regarding severe accidents suggests that the integration of TTT and memory-augmented learning provides substantial advantages in handling high-risk cases.
Prior studies have demonstrated that memory-aware architectures enhance long-term dependency retention, improving classification performance for underrepresented data distributions [
3,
29]. Additionally, TTT plays a critical role in refining predictions based on real-time environmental shifts, ensuring that severe accidents, which are often influenced by sudden changes in weather, traffic conditions, and road infrastructure, are more accurately identified [
8,
38]. The ability of the TTT-Enhanced Transformer to dynamically adjust class importance through Class-Balanced Attention further reduces misclassification bias, aligning with existing research on adaptive deep learning models for safety-critical applications [
23,
39].
The ROC-AUC analysis provides further evidence of the TTT-Enhanced Transformer’s superior discriminatory capacity across accident severity levels, as shown in
Figure 10. The model consistently achieved AUC scores ranging from 0.984 to 0.995, with severe and extreme accident cases reaching AUC = 0.993, indicating exceptionally strong predictive performance in high-risk scenarios. These results are in line with research on class-aware optimization techniques, where Focal-Loss-based approaches have been shown to improve model discrimination power in class-imbalanced datasets [
12,
15].
Furthermore, the TTT framework enables dynamic refinement of decision boundaries, significantly improving sensitivity to minority class instances. The ability to achieve high true-positive rates while minimizing false positives is imperative for real-world traffic forecasting, as erroneous classification of severe accidents could lead to inadequate emergency responses and suboptimal resource allocation [
5,
16].
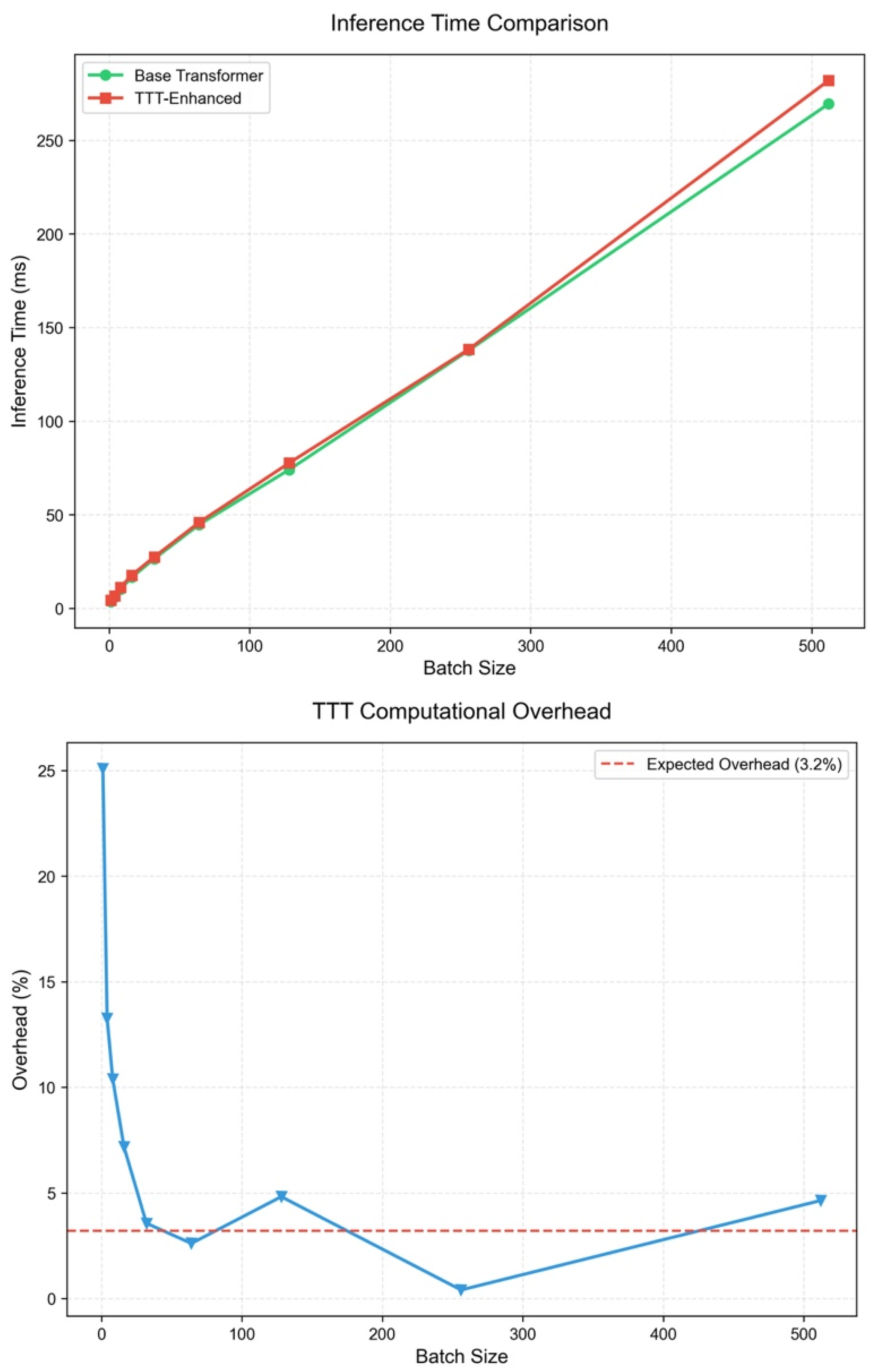
Computational Complexity Analysis
While TTT enhances generalization, it introduces additional computational overhead. The computational complexity of a standard Transformer inference is
due to the self-attention mechanism [
14]. In contrast, TTT incorporates an iterative update mechanism, increasing the computational cost to
, where T represents the number of adaptation steps required for convergence [
3]. To quantify this trade-off, the additional inference overhead must be defined as follows:
where
is the inference time with TTT enabled, and
is the inference time of the baseline Transformer model.
To provide a realistic benchmark, we measured inference latency on a consumer-grade Apple MacBook Pro (M1 Pro, 16 GB RAM)—a device whose computation budget is closer to typical edge-deployment or field-laptop scenarios than to high-end servers. As shown in
Figure 11 and summarized in
Table 4, the TTT mechanism introduces an average overhead of 3.3%, with latency remaining consistently low for typical deployment batch sizes (128–512), ranging between 2.1% and 3.43%. This confirms that TTT is both lightweight and scalable under realistic operational conditions.
Importantly, this minor computational overhead is far outweighed by the substantial improvements in classification performance for rare and severe accident categories (
Table 3 and
Table 5). In real-world traffic-monitoring applications, the ability to accurately identify high-risk incidents is far more critical than minor increases in inference time. These findings demonstrate the practical feasibility of integrating TTT into intelligent transportation systems to achieve robust and real-time accident severity prediction [
16,
17,
40,
41].
3.2. Ablation Study and Component Contribution Analysis
To quantify the contributions of key model components, ablation experiments were conducted by systematically removing core elements, and the performance impacts are summarized in
Table 5. The results affirm that TTT is the most crucial component, with its removal leading to the most significant degradation in performance. Without TTT, the overall accuracy declines by 5.65% (from 96.86% to 91.21%), severe accident recall drops by 9.51%, and the F1-score decreases by 0.08, reinforcing the role of continuous adaptation in mitigating distribution shifts [
9,
38].
Other model components also exert considerable influence. Class-Balanced Attention and Focal Loss contribute substantially to recall improvement for severe accidents, with their removal resulting in 6.6% and 6.3% declines in recall, respectively. These findings support prior research demonstrating that weighted attention mechanisms enhance minority class representation, effectively reducing misclassification biases in imbalanced datasets [
5,
11,
23]. The Feature Pyramid Network (FPN) and Adaptive Memory Layer (AML) also have a notable impact, particularly in enhancing model stability and multi-scale feature extraction. Removing the FPN resulted in a 4.0% recall drop for severe accidents, while removing AML led to a 3.7% decrease in recall, suggesting that hierarchical feature learning and memory-augmented processing are essential for accurate severity classification [
21,
26,
42].
To further isolate the contribution of Class-Balanced Attention (CBA), we introduced two additional ablation variants in a no-sampling scenario. As shown in
Table 5, adding CBA alone improved severe recall from 0.512 to 0.674 and the severe F1-score from 0.573 to 0.707, even without incorporating any data-level balancing strategies. These results demonstrate that CBA achieves significant gains in minority class recognition independently, highlighting its complementary role with respect to sampling techniques in mitigating class imbalance.
4. Discussion
This paper demonstrates that integrating TTT, memory-augmented learning, and multi-scale feature extraction significantly improves deep learning models for traffic accident prediction. The TTT-Enhanced Transformer effectively mitigates distribution shifts and improves generalization in non-stationary environments, making it well-suited for real-world intelligent transportation systems, where traffic patterns evolve due to weather, infrastructure changes, and traffic fluctuations.
Unlike conventional deep learning models, which rely on static training data, TTT dynamically refines model parameters during inferencing, ensuring improved generalization across unseen traffic conditions. The results confirm that TTT reduces misclassification rates for severe accidents by addressing distribution shifts. The challenge of class imbalance, which often leads to high false-negative rates for severe accidents, is alleviated through Class-Balanced Attention (CBA) and Focal Loss, which increase recall for severe and extreme accidents by 9.51%, supporting prior research on class-aware deep learning for safety-critical applications.
Beyond class imbalance, memory-augmented learning enhances predictive accuracy by retaining long-term dependencies in accident-prone areas. The Feature Pyramid Network (FPN) complements this by capturing both localized accident characteristics and broader traffic patterns, enabling more robust feature representations. These findings underscore the importance of combining hierarchical feature learning with adaptive memory mechanisms to improve accident-forecasting performance in real-world environments.
The proposed methodology extends beyond traffic accident prediction and has applications in autonomous-vehicle risk assessment, smart city infrastructure, and emergency response systems. In domains such as financial risk forecasting, medical diagnostics, and climate hazard modeling, where data distributions continuously evolve, the integration of memory-enhanced learning and test-time adaptation can improve predictive accuracy and robustness.
Although TTT introduces a slight computational overhead, empirical evaluation confirms that the 3.3% increase in inference time remains within an acceptable range for real-time deployment. The trade-off between minor computational costs and significantly improved predictive performance makes this approach practical for intelligent transportation systems. The ability to refine predictions online ensures stable and reliable performance in dynamic environments without introducing significant computational burdens.
5. Limitations and Ethical Considerations
Despite the strong empirical performance of the TTT-Enhanced Transformer, several technical limitations and ethical concerns must be acknowledged to ensure its responsible deployment.
From a technical standpoint, the model exhibits sensitivity to hyperparameter choices, particularly those governing test-time training—such as adaptation step size, learning rate, and the number of refinement iterations. Suboptimal settings may lead to unstable convergence or diminished generalization, particularly when there are severe distribution shifts. Moreover, while memory-augmented mechanisms improve long-term context retention, they can also amplify noise or outliers, especially in sparsely represented or mislabeled samples. Future work should explore more robust meta-learning strategies, uncertainty-aware adaptation, and automated hyperparameter optimization to enhance reliability under real-world conditions.
Ethically, traffic prediction models trained on historical and geospatial data should carefully manage risks related to privacy, bias, and accountability. Inadequate representation of certain regions or demographic groups may introduce algorithmic bias, resulting in inequitable predictions or emergency resource allocation. Furthermore, the use of location-sensitive data may raise privacy concerns if such data are not appropriately anonymized. To mitigate these risks, predictive frameworks should incorporate bias audits, fairness metrics, and privacy-preserving techniques. It is important to note that such models should serve as decision-support tools rather than autonomous systems—particularly in critical applications such as emergency dispatch, traffic control, or policy planning.
In summary, while the TTT-Enhanced Transformer demonstrates strong performance, its deployment must be accompanied by comprehensive safeguards to ensure fairness, robustness, and ethical integrity across diverse deployment contexts.
6. Conclusions
In this paper, we introduced the TTT-Enhanced Transformer, a novel deep learning framework tailored to tackling distribution shifts and class imbalance in traffic accident severity prediction. By synergistically integrating Test-Time Training (TTT) for adaptive inference, an Adaptive Memory Layer (AML) for enhanced sequential modeling, a Feature Pyramid Network (FPN) for multi-scale feature extraction, and specialized class imbalance techniques (Class-Balanced Attention (CBA) and Focal Loss), the proposed model significantly improved prediction accuracy and robustness. Empirical evaluations demonstrated its clear superiority over conventional LSTM and standard Transformer models, achieving a 5.65% improvement in overall accuracy and a notable 9.6% enhancement in recall for severe accident categories. Ablation analyses further confirmed the effectiveness of each module, especially highlighting the critical role of test-time adaptation in ensuring robust generalization under dynamically evolving traffic conditions.
Future research should focus on expanding this model’s applicability across diverse real-world settings. Specifically, we suggest exploring transfer learning strategies to adapt the model to traffic datasets from different geographic regions or infrastructure systems. This is essential for assessing the transferability and robustness of the framework beyond a single domain. In addition, integrating real-time sensor telemetry (e.g., GPS, weather, and traffic flow) may further improve predictive accuracy in evolving conditions. The development of lightweight variants optimized for edge computing could also facilitate real-time deployment in resource-constrained environments.
These findings suggest that incorporating adaptive learning mechanisms into traffic-forecasting pipelines can significantly enhance risk assessment, emergency response, and policymaking in intelligent transportation systems. Broader deployment, however, will require addressing domain adaptation, multi-modal data fusion, and fairness-driven evaluations to ensure reliable and equitable model performance at scale.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}