
A Robust Timing Synchronization Algorithm Based on PSSS for LTE-V2X



Abstract
:1. Introduction
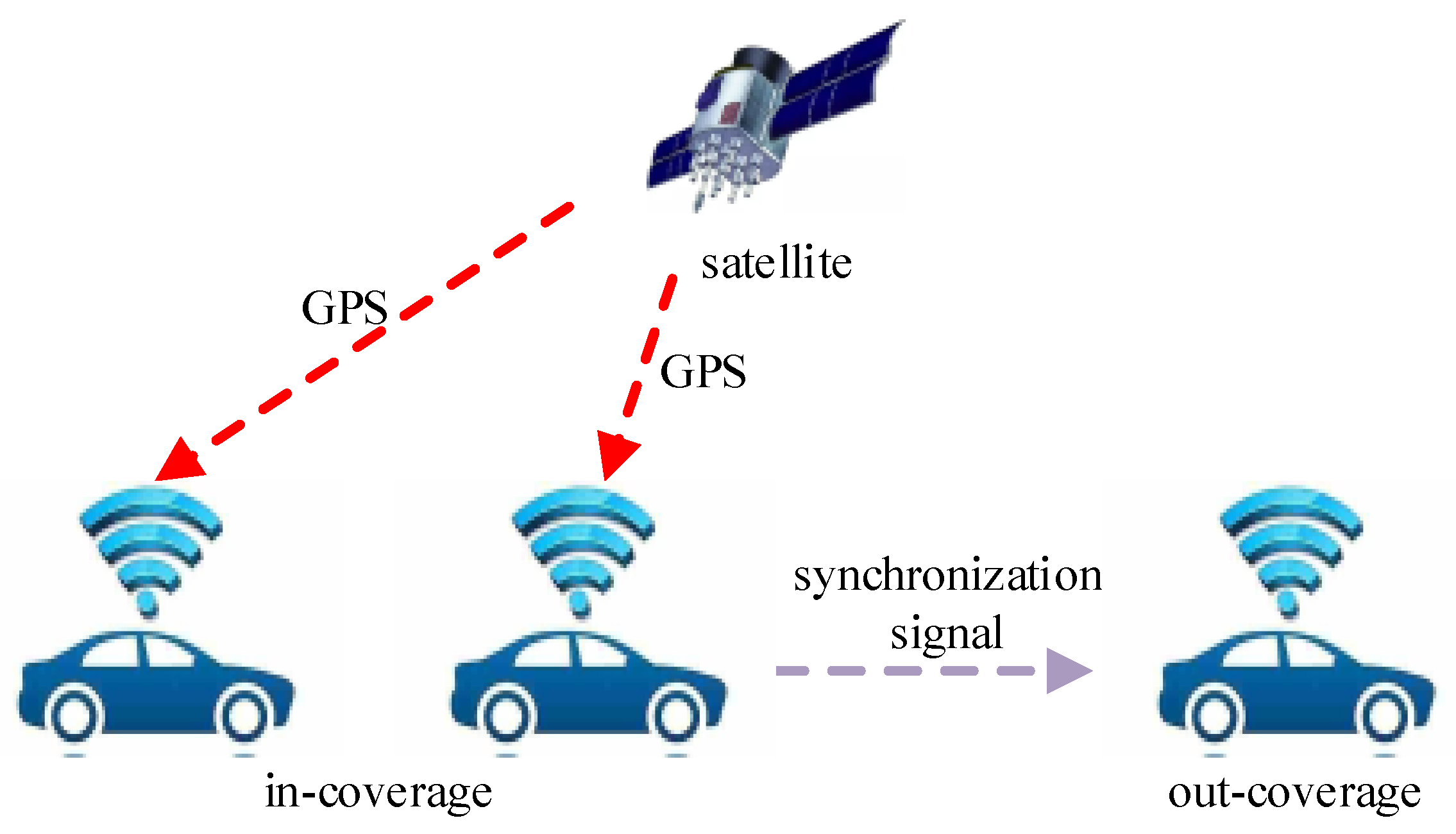
- V2X communication equipment utilizes Single Carrier Frequency Division Multiple Access (SC-FDMA) modulation, accompanied by low-transmission power. This necessitates the symbol timing synchronization algorithm at the receiver to set a low detection threshold, preventing the missed detection of the Primary Sidelink Synchronization Signal (PSSS). The On-Board Unit (OBU) antenna is typically mounted atop the vehicle, and the signal may be blocked by large vehicles or other obstacles during relative movement, leading to a deep fading of the SNR of the received signal.
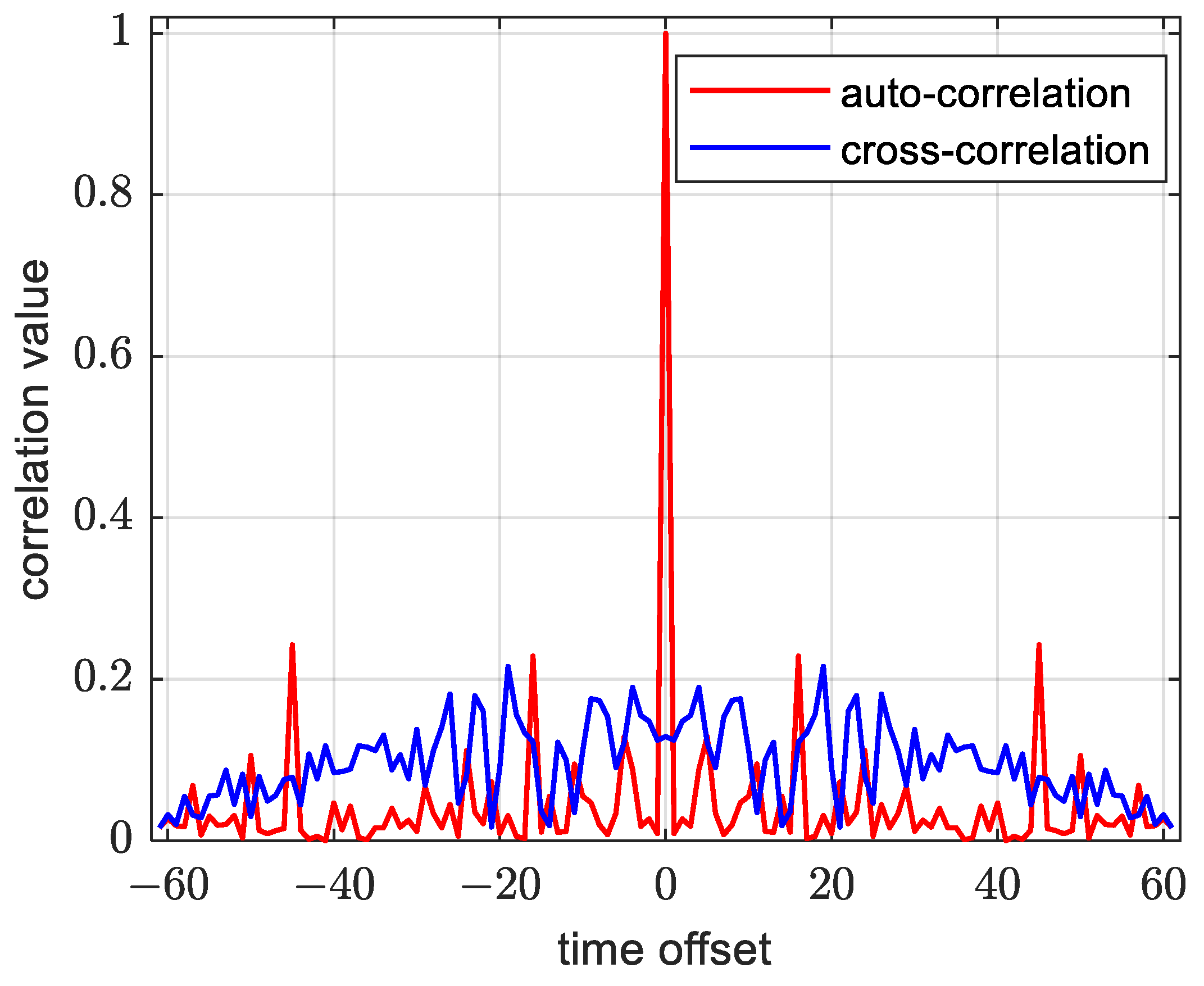
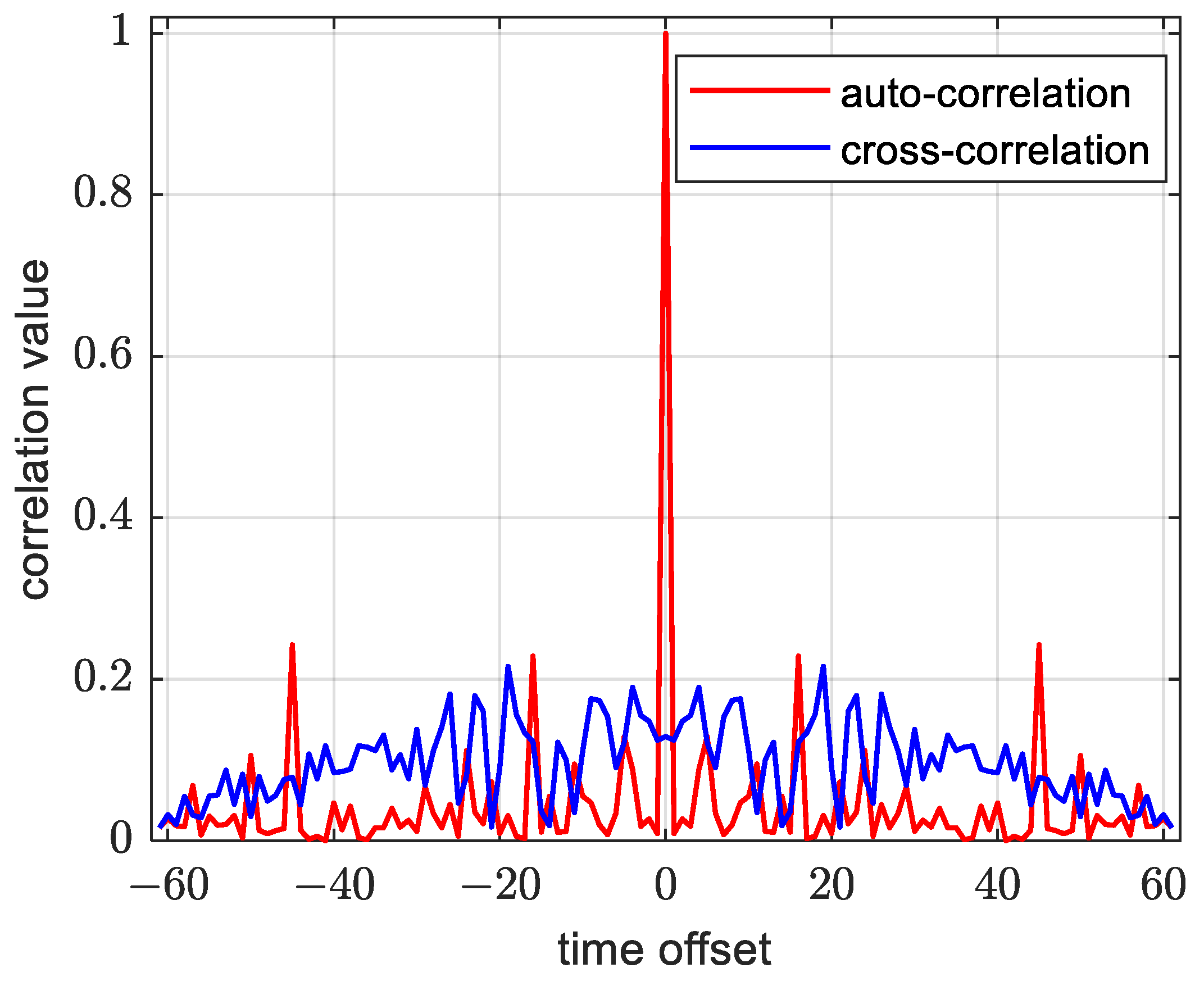
- The high speed of relative movement between nodes poses significant challenges to timing synchronization. The frequency of the LTE-V2X system is considerably higher than that of the LTE cellular network, with relative speeds between nodes potentially reaching up to 240 km/h, resulting in a substantial Doppler frequency offset. The instability of the local oscillator between the transmitter and receiver introduces a considerable frequency deviation. A 1 ppm error, for instance, leads to a frequency offset of 5.91 kHz at a frequency of 5.91 GHz. These factors contribute to the emergence of ‘secondary peaks’ near the correct correlation peak, thereby affecting the Correct Detection Rate (CDR) process in synchronization.
- The cycle of LTE-V2X synchronization signals (160 ms) is 32 times that of LTE 4G synchronization signals (5 ms) and 4 times that of LTE Device-to-Device (D2D) synchronization signals (40 ms). When utilizing correlation calculation results, especially those involving multi-symbol accumulation, for symbol synchronization, the computational complexity significantly increases, leading to a reduction in synchronization efficiency. In scenarios such as connected vehicle networks, where sensitivity to latency is critical, improving the efficiency of time synchronization is of paramount importance.
- We investigate and analyze several commonly used time synchronization algorithms based on the PSSS. We perform theoretical analyses on aspects such as synchronization signal detection performance and algorithm complexity.
- We propose an improved symbol timing synchronization algorithm based on the PSSS, aiming to enhance the robustness and accuracy of synchronization signal detection in LTE-V2X. We conduct simulation analyses to compare its performance with existing algorithms, demonstrating effective improvement in robustness under high frequency offset and low SNR scenarios in vehicular networks.
- We establish a hardware-in-the-loop simulation platform and compare the performance of the proposed improved algorithm with other existing algorithms in different scenarios and vehicle speeds. We validate, in high-speed mobile scenarios, that the proposed algorithm maintains a high CDR even under low SNR conditions.
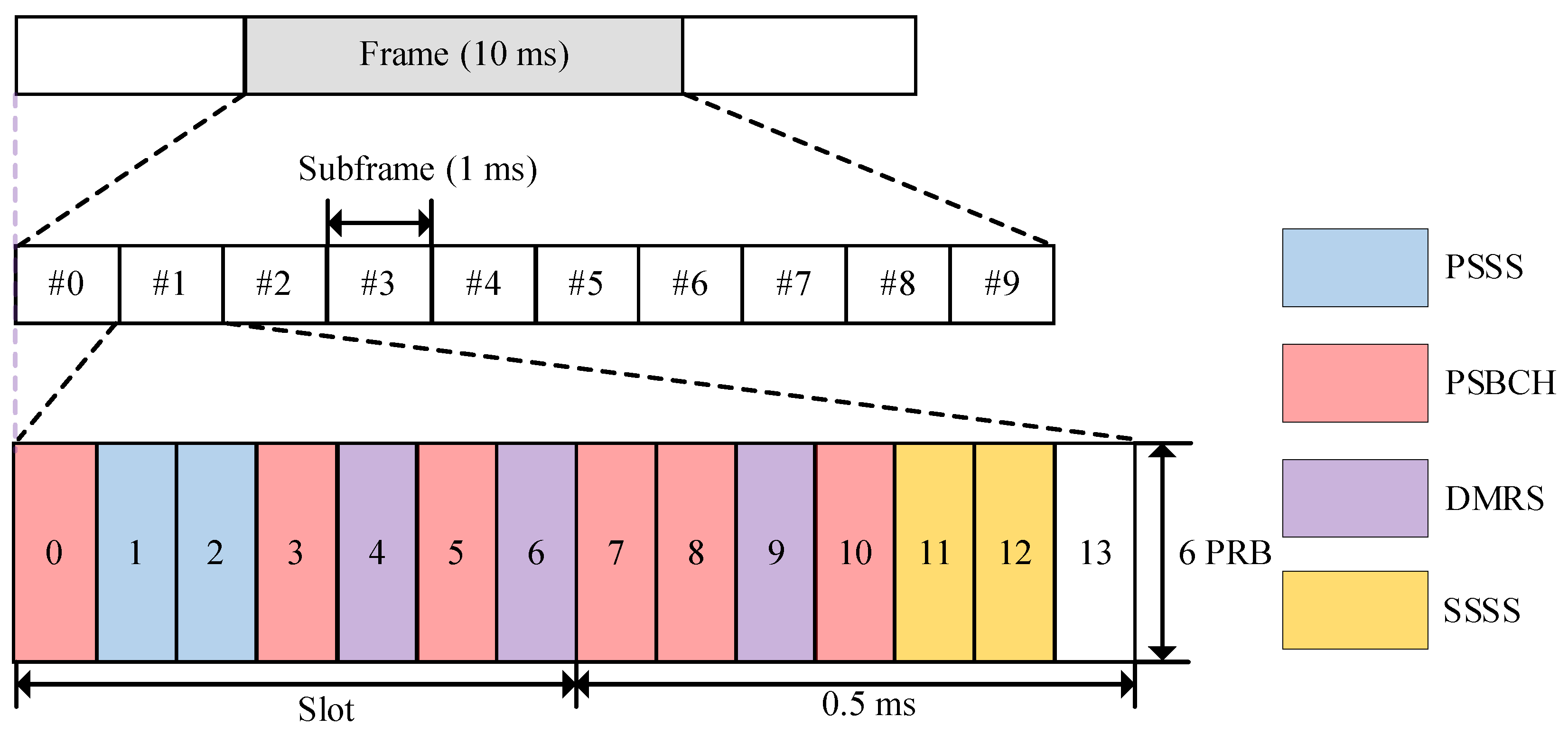
2. PSSS in LTE-V2X
3. Traditional PSSS-Based Time Synchronization Algorithm
3.1. PSSS-Based Time Domain Cross-Correlation Algorithm
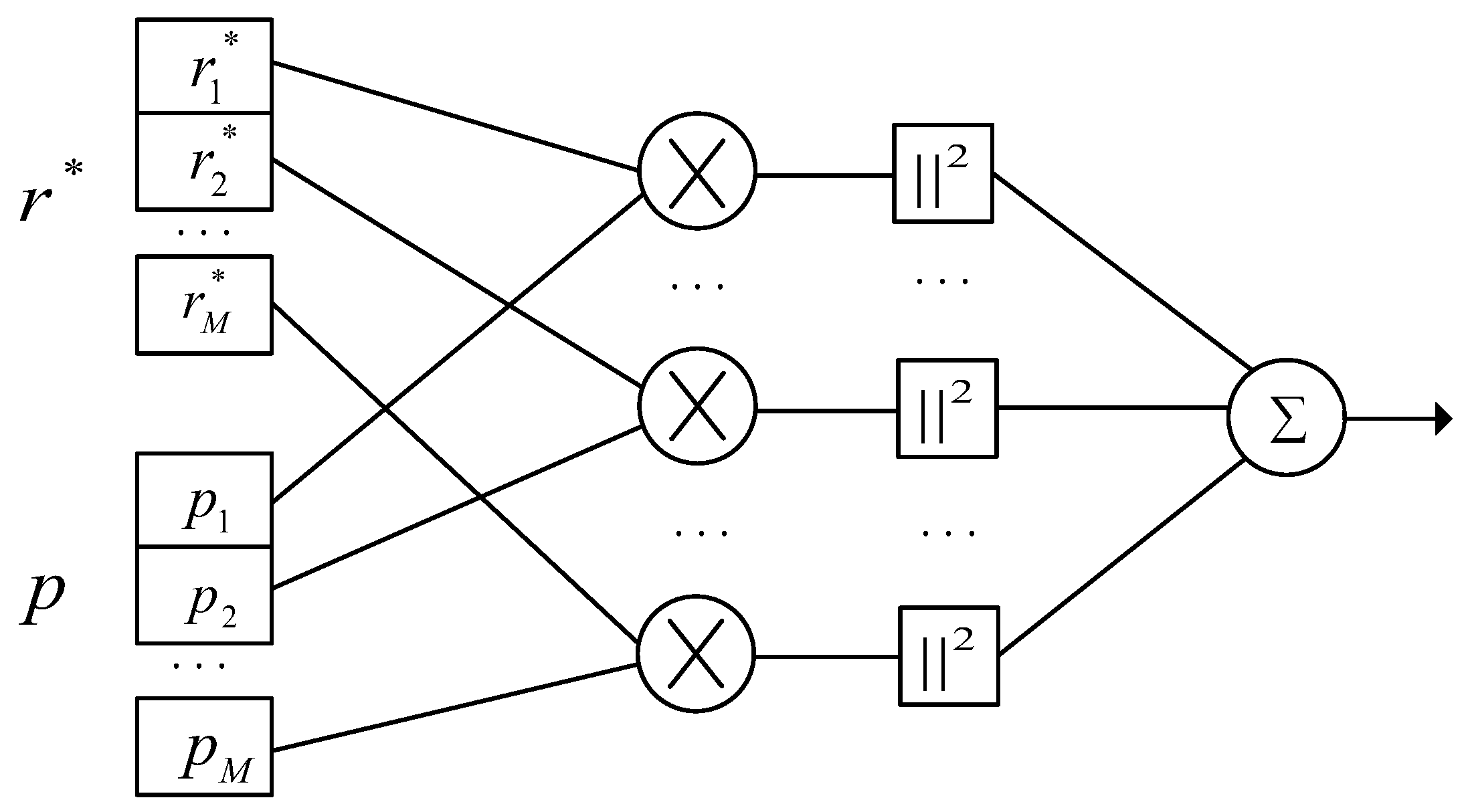
3.2. PSSS-Based Time Domain Block Cross-Correlation Algorithm
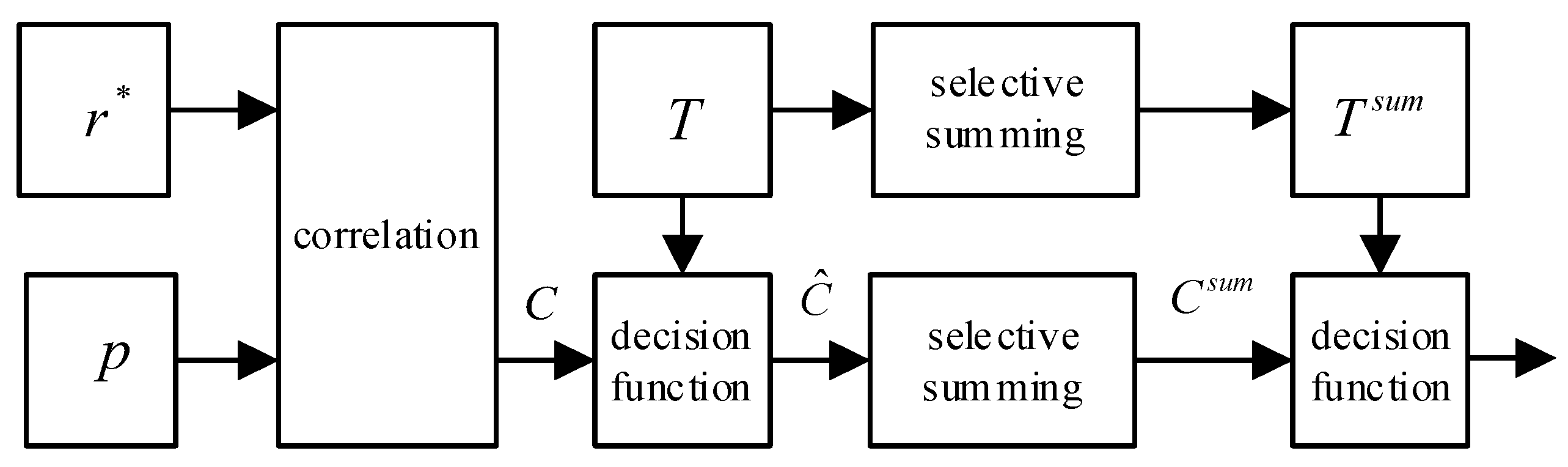
3.3. PSSS-Based Selective Summing Algorithm
4. Improved PSSS-Based Time Synchronization Algorithm
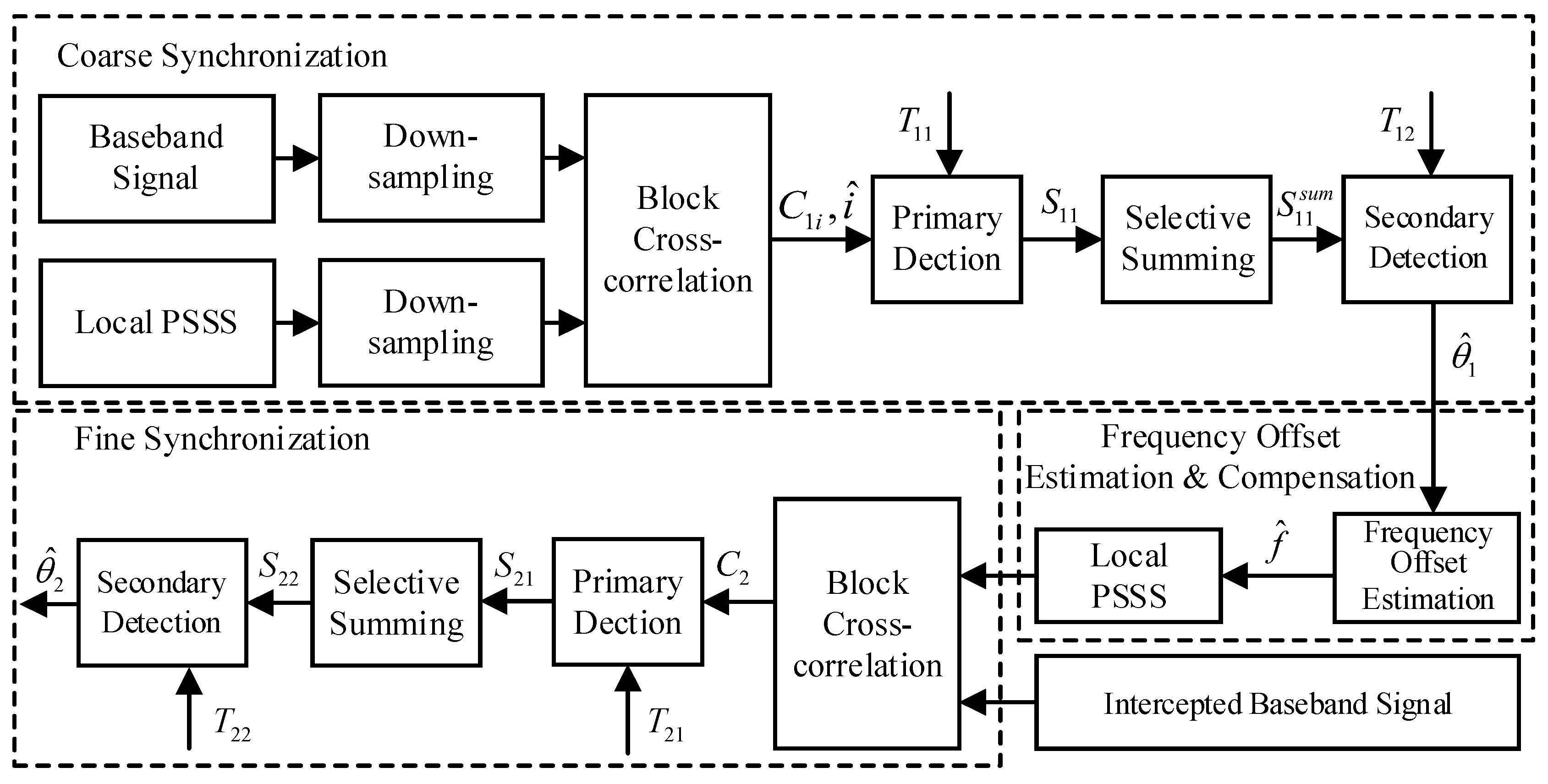
- The block cross-correlation algorithm and selective summing algorithm are improved and merged in the existing symbol timing synchronization algorithm, and the threshold is designed to make it more robust to frequency offset and noise.
- After coarse synchronization, the local synchronization signal and the received synchronization signal are used to estimate the frequency offset, and the local synchronization signal is compensated, which significantly improves the resistance of the algorithm to frequency offset.
- Although the baseband signal is downsampled before coarse synchronization, the baseband signal is intercepted before fine synchronization, which significantly reduces the number of correlation operations at the receiving end and makes the algorithm less complex, ensuring that the reliability and accuracy of the algorithm are high.
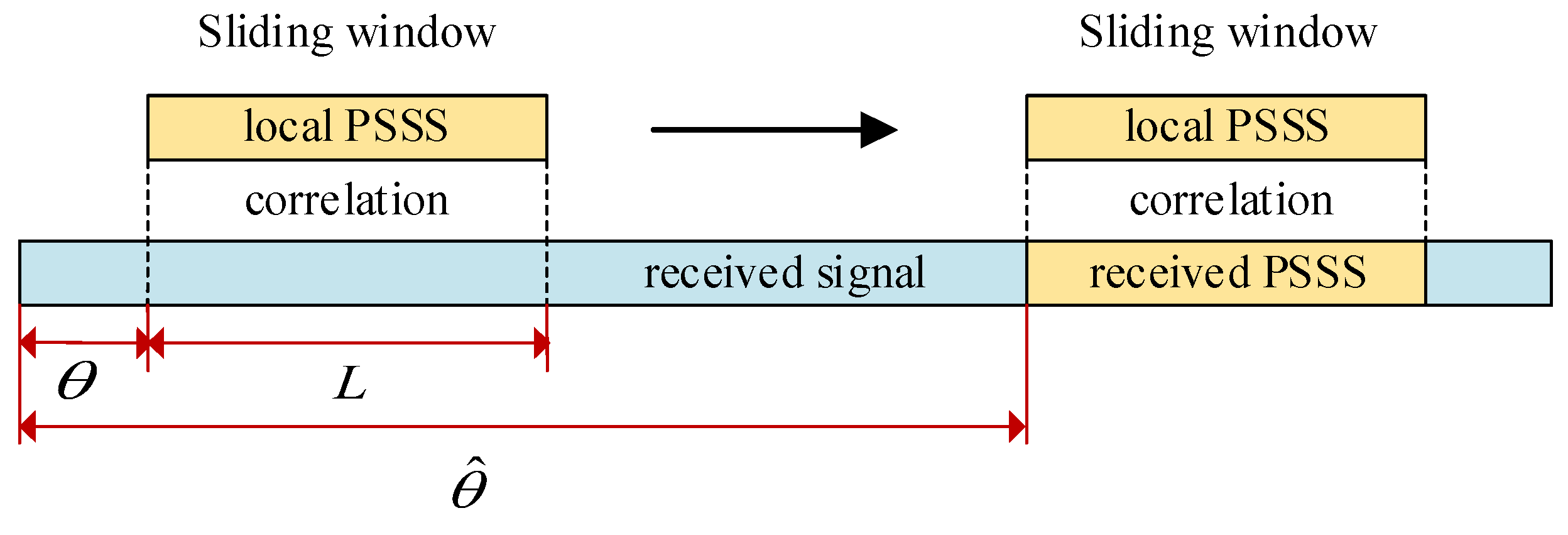
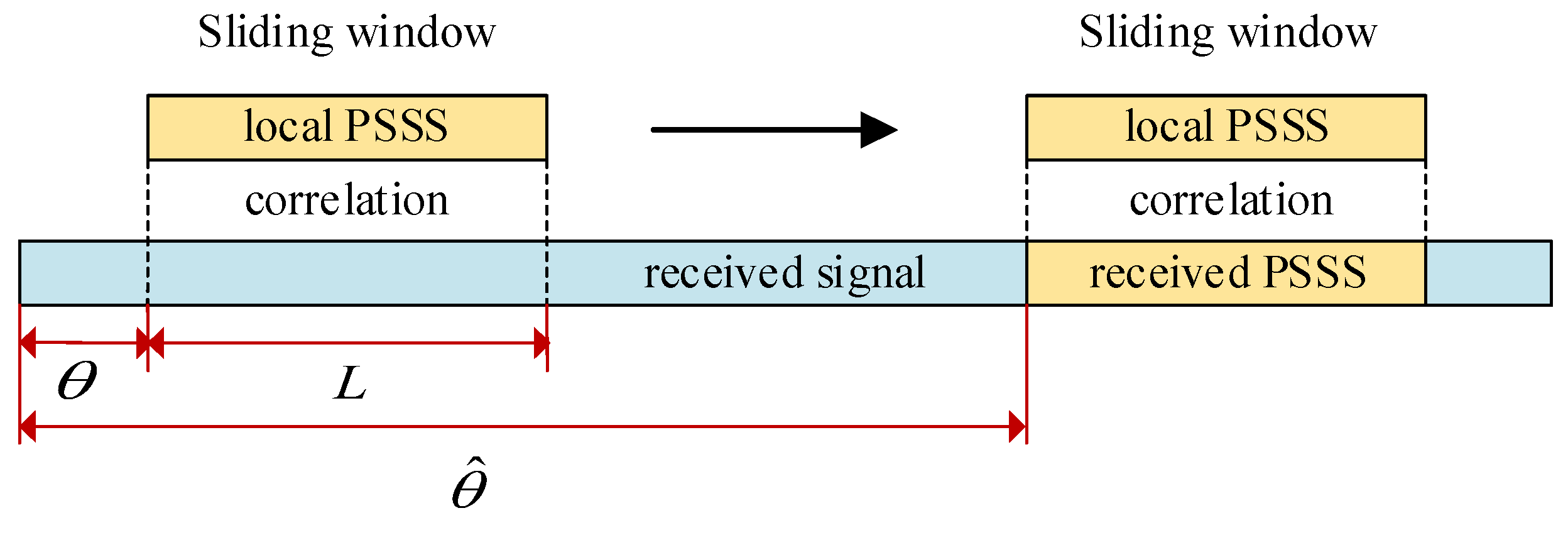
4.1. Coarse Synchronization
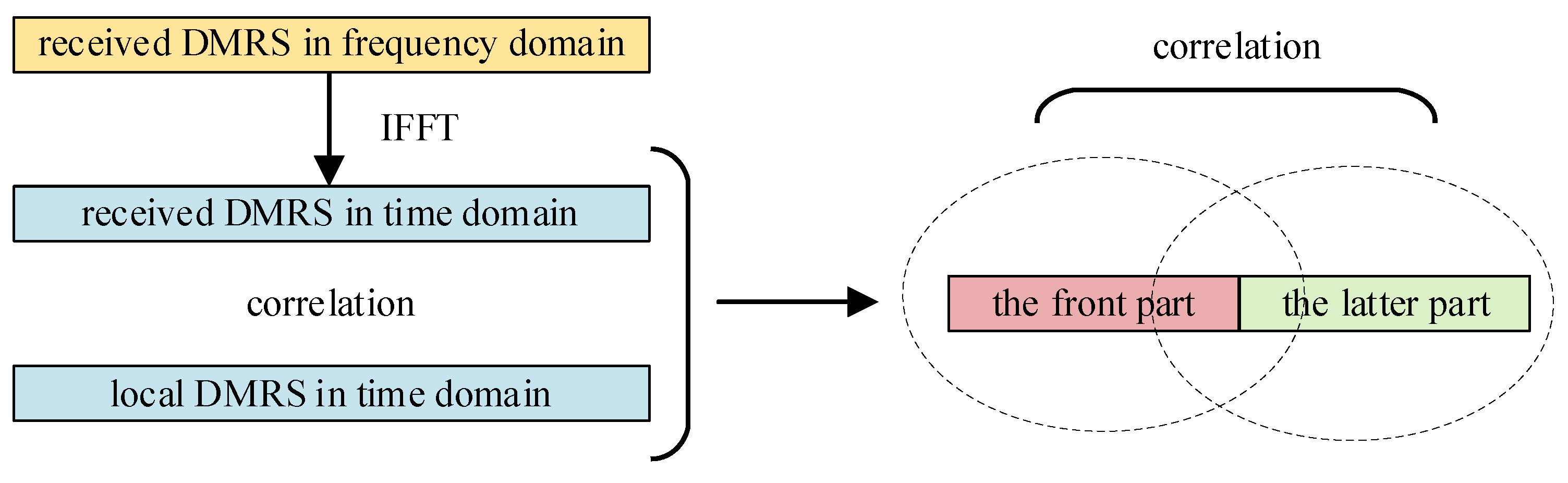
4.2. Frequency Offset Estimation
4.3. Fine Synchronization
5. Results and Discussion
5.1. Software Simulation
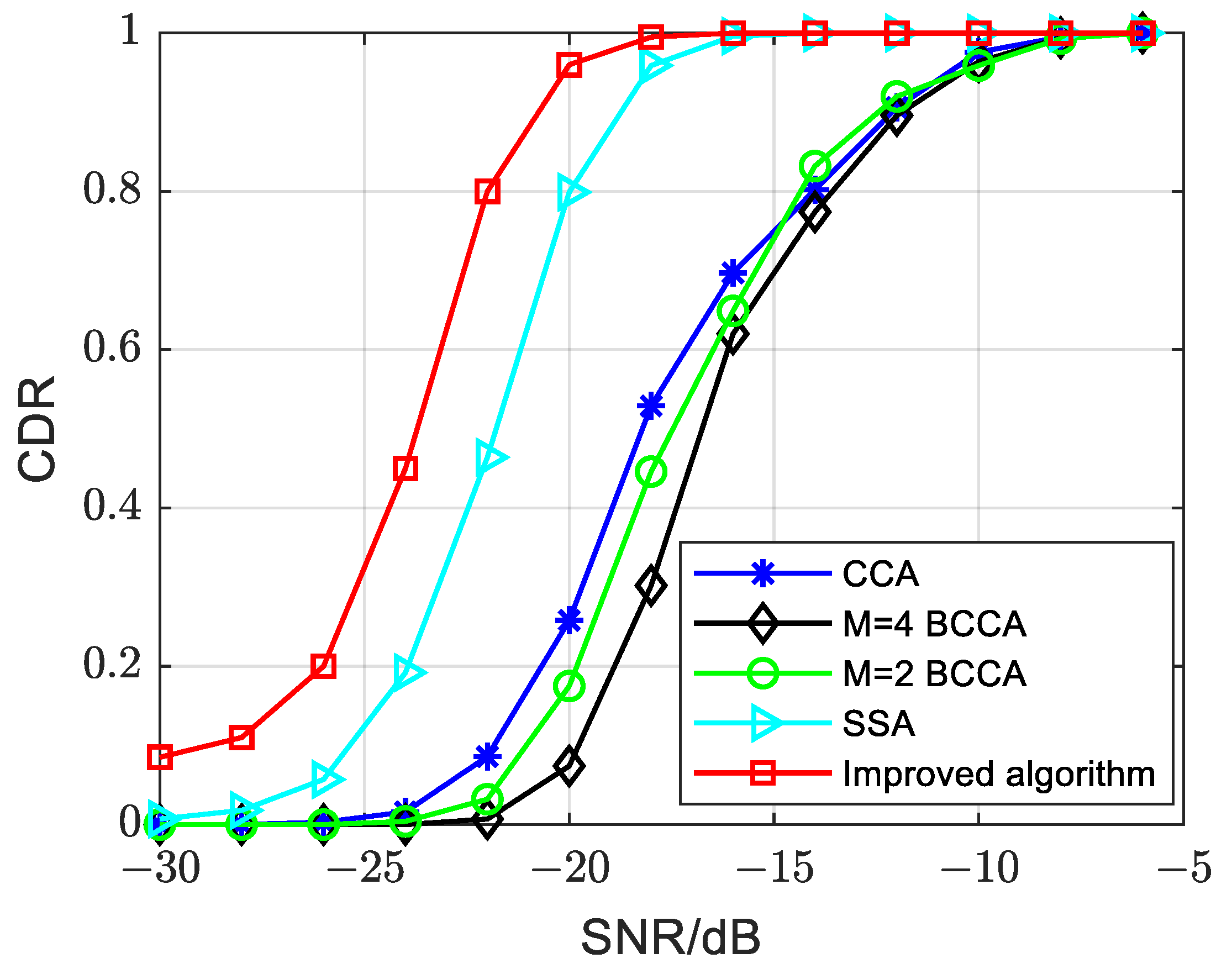
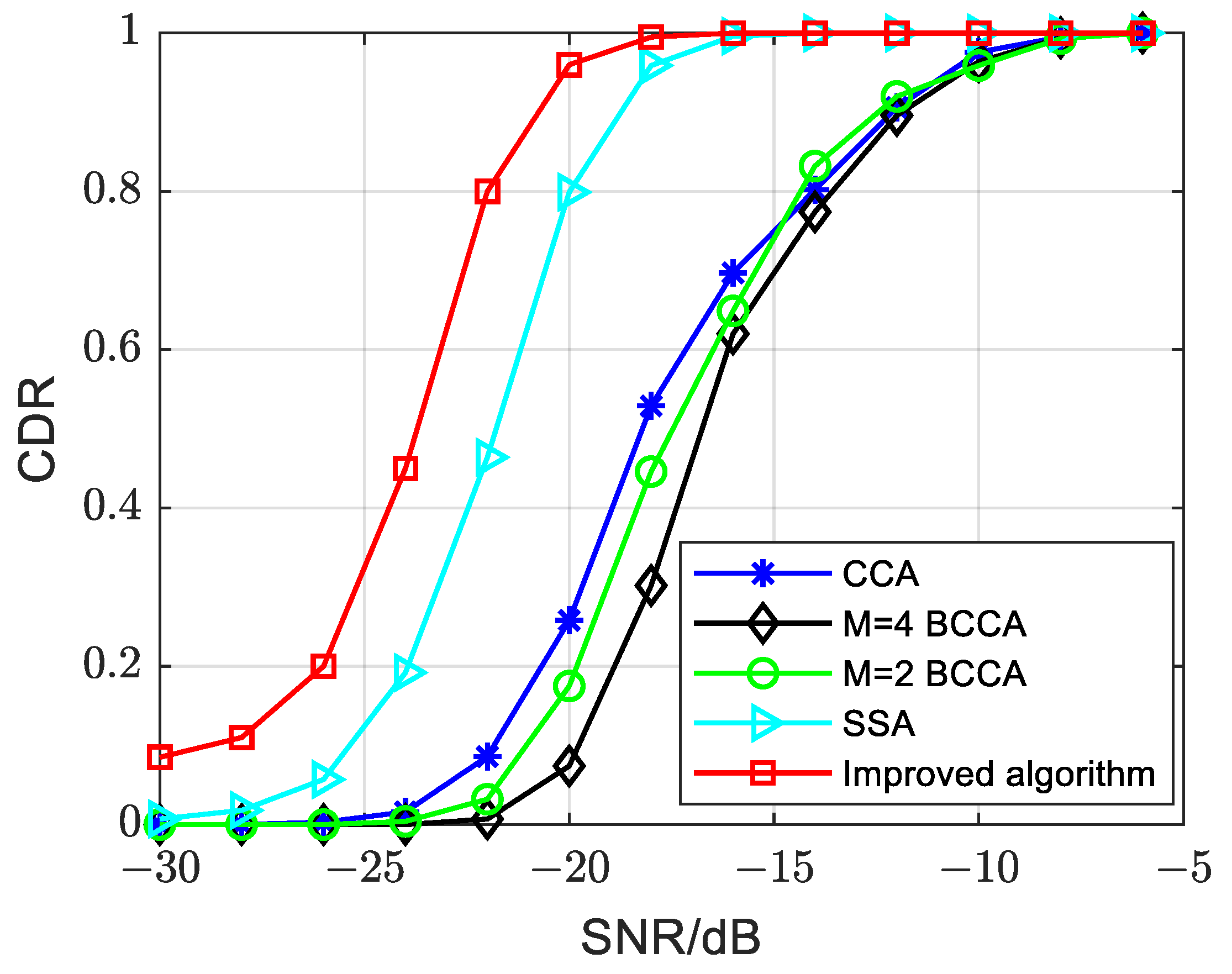
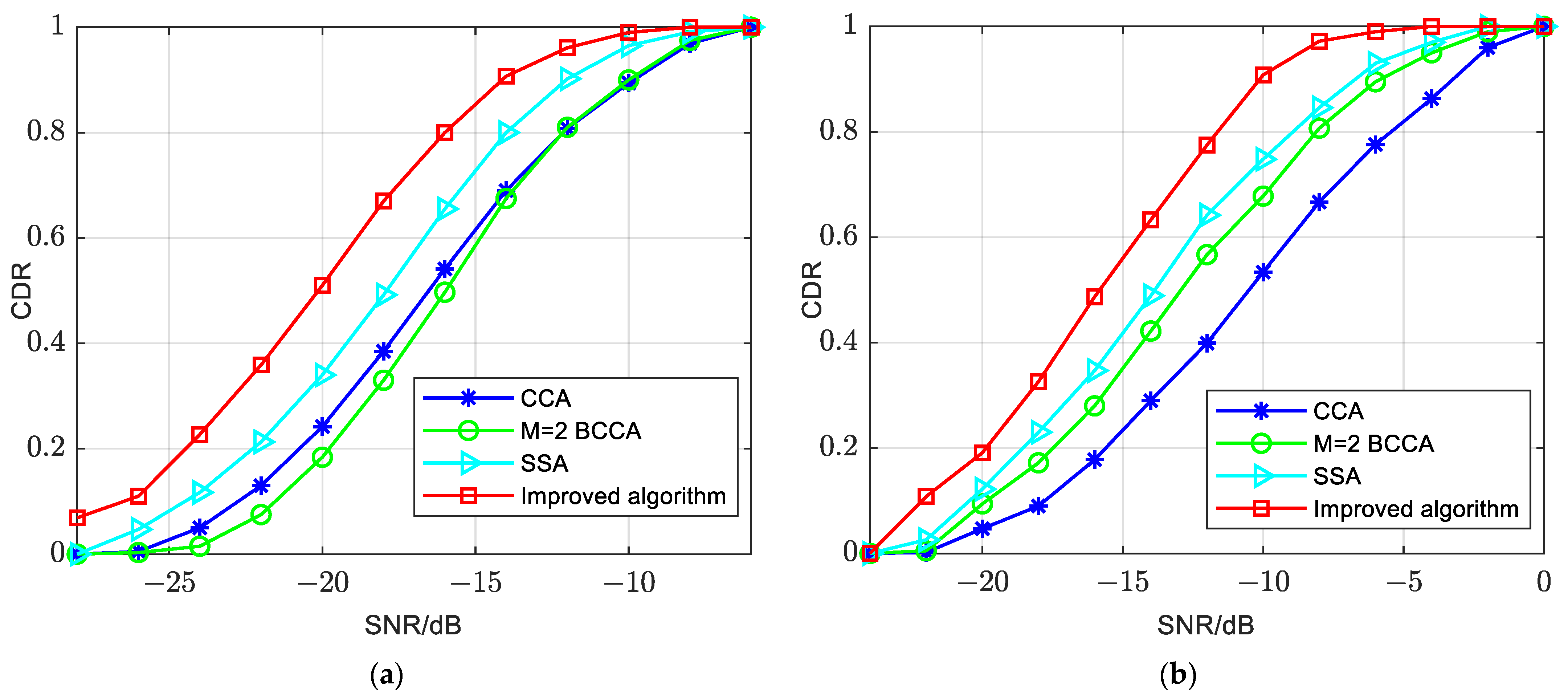
- The proposed improved algorithm in this paper exhibits significant improvement in PSSS detection compared to other algorithms. The enhancement is approximately 6–8 dB compared to the CCA, M = 4 and M = 2 BCCAs and around 2 dB compared to the SSA. The improved algorithm maintains a CDR close to 0.9 even at −20 dB.
- In comparison to the BCCA and CCA, the SSA demonstrates superior PSSS detection performance with an improvement of approximately 4–6 dB. The SSA achieves a CDR close to 0.9 at an SNR of −18 dB.
- The M = 2 and M = 4 BCCAs perform similarly to the CCA when the SNR is greater than −15 dB. However, when the SNR is below −15 dB, the performance of the M = 4 BCCA is 2–3 dB worse than that of the M = 2 BCCA and the CCA. This discrepancy is attributed to the increased number of blocks leading to noise superposition, resulting in poor synchronization performance at a low SNR.
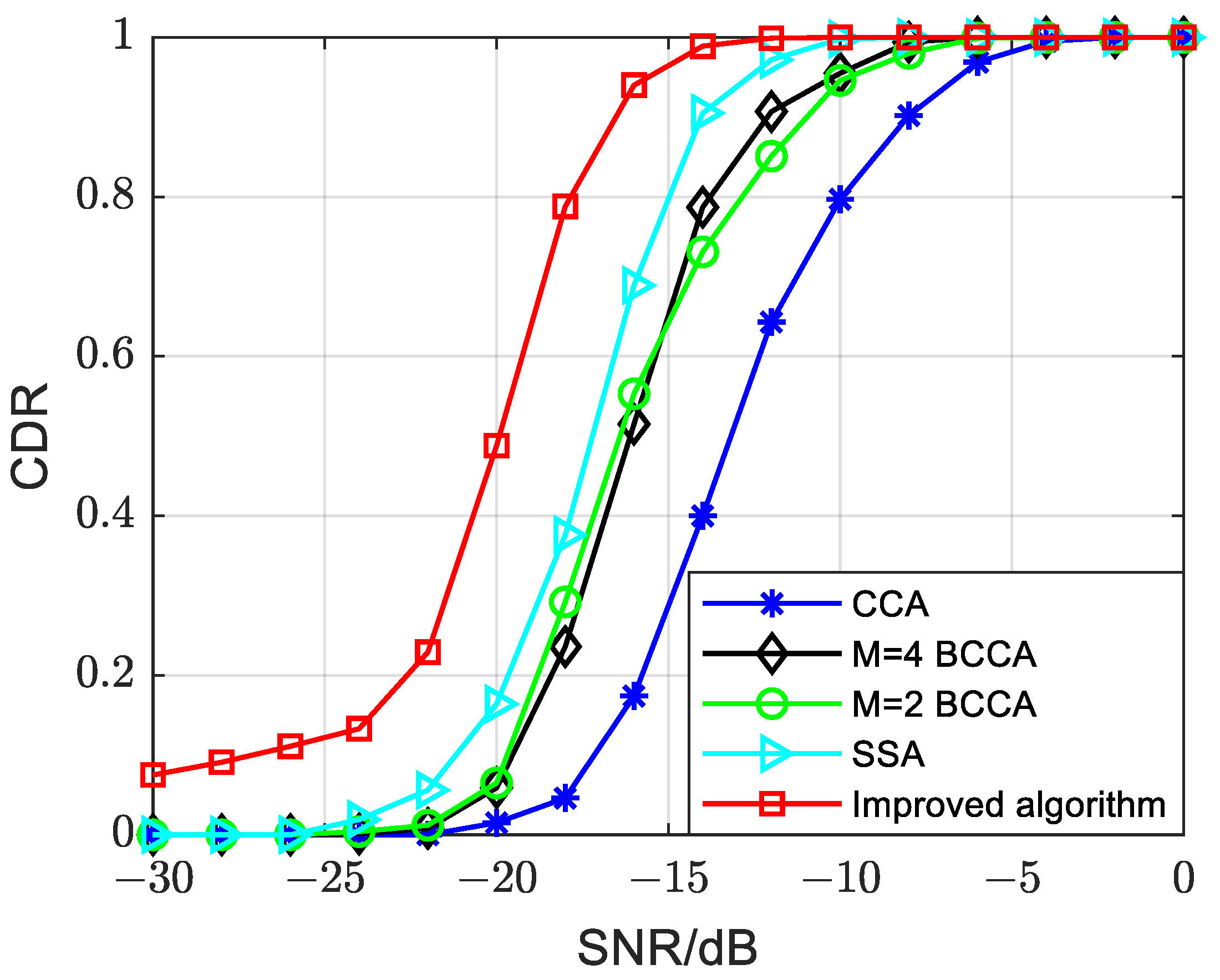
- The improved algorithm demonstrates superior PSSS detection performance compared to other algorithms, with an approximate 3 dB improvement over the SSA and about a 4 dB improvement over the M = 4 and M = 2 BCCAs. Additionally, the improved algorithm maintains a CDR close to 0.9 at −16 dB.
- For the M = 4 and M = 2 BCCAs, their performance surpasses that of the CCA. Under various SNRs, the CDR of the BCCA consistently exceeds that of the CCA. This is attributed to the block, which reduces the cumulative effect of frequency offset.
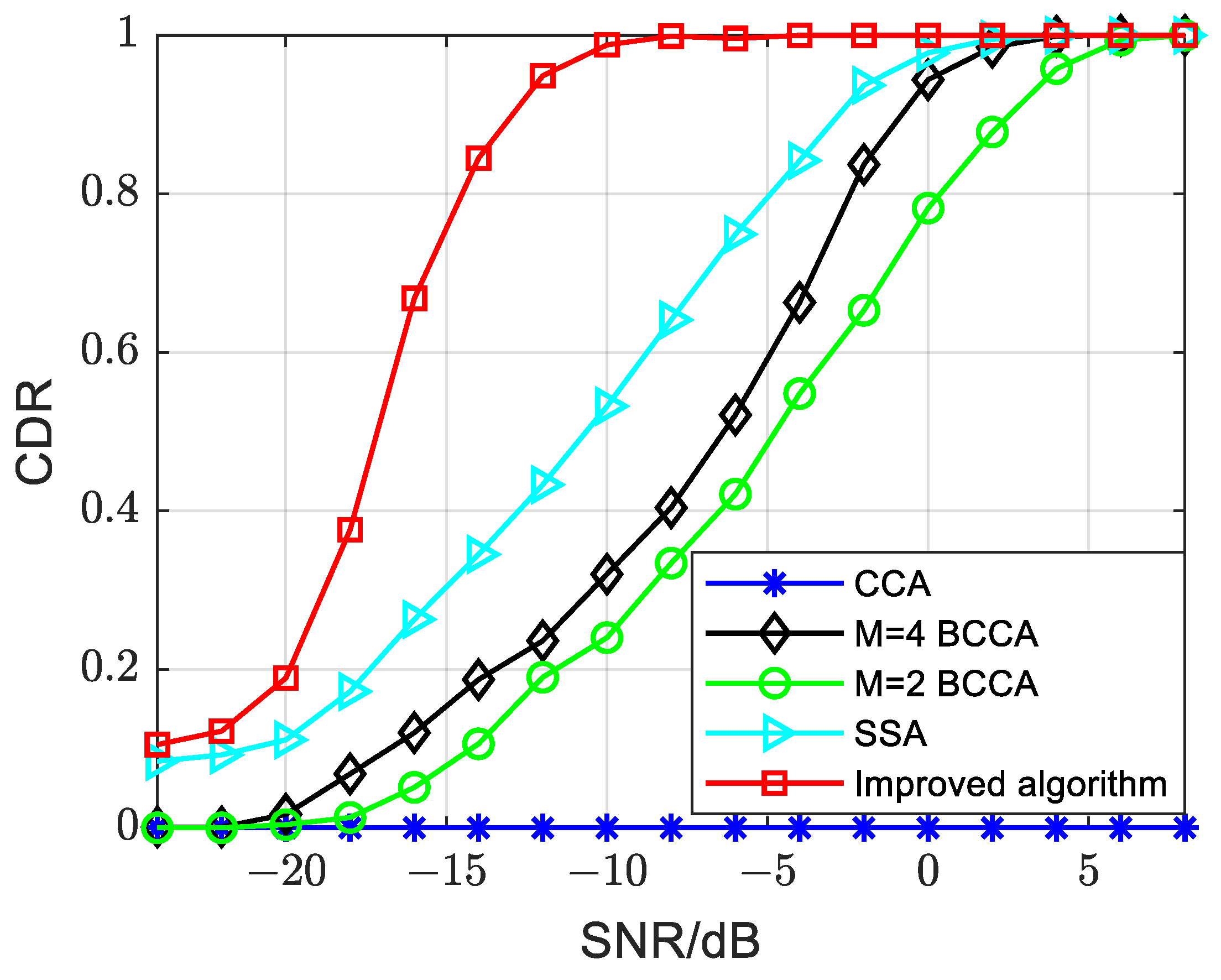
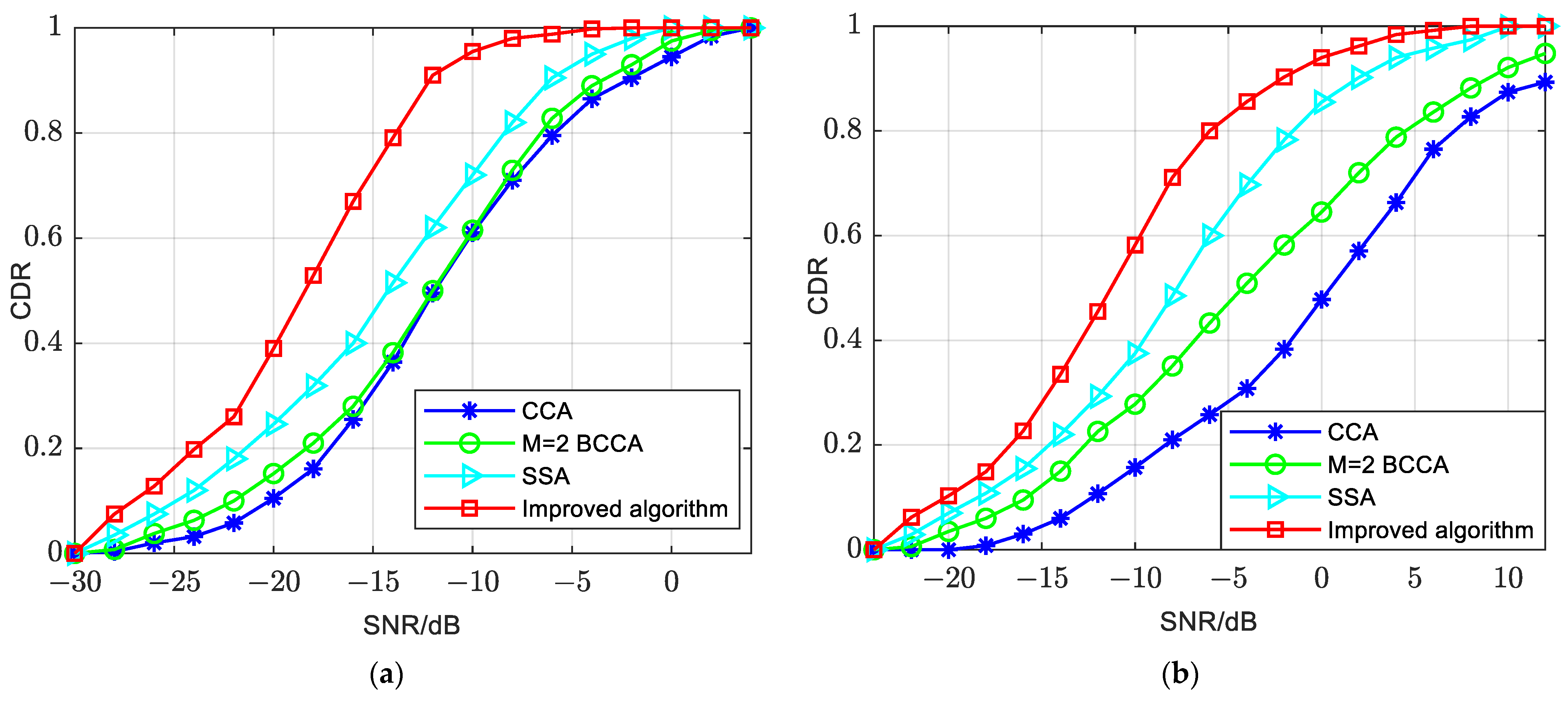
- The improved algorithm demonstrates superior resistance to a high frequency offset compared to other algorithms. Specifically, it achieves a performance improvement of up to 14 dB compared to the M = 4 and M = 2 BCCAs. In comparison to the SSA, the improvement reaches 10 dB. The improved algorithm attains a CDR of 0.9 at −14 dB.
- The CCA loses its ability to detect the PSSS when the normalized frequency offset reaches 1. The CDR of the CCA remains consistently at 0.
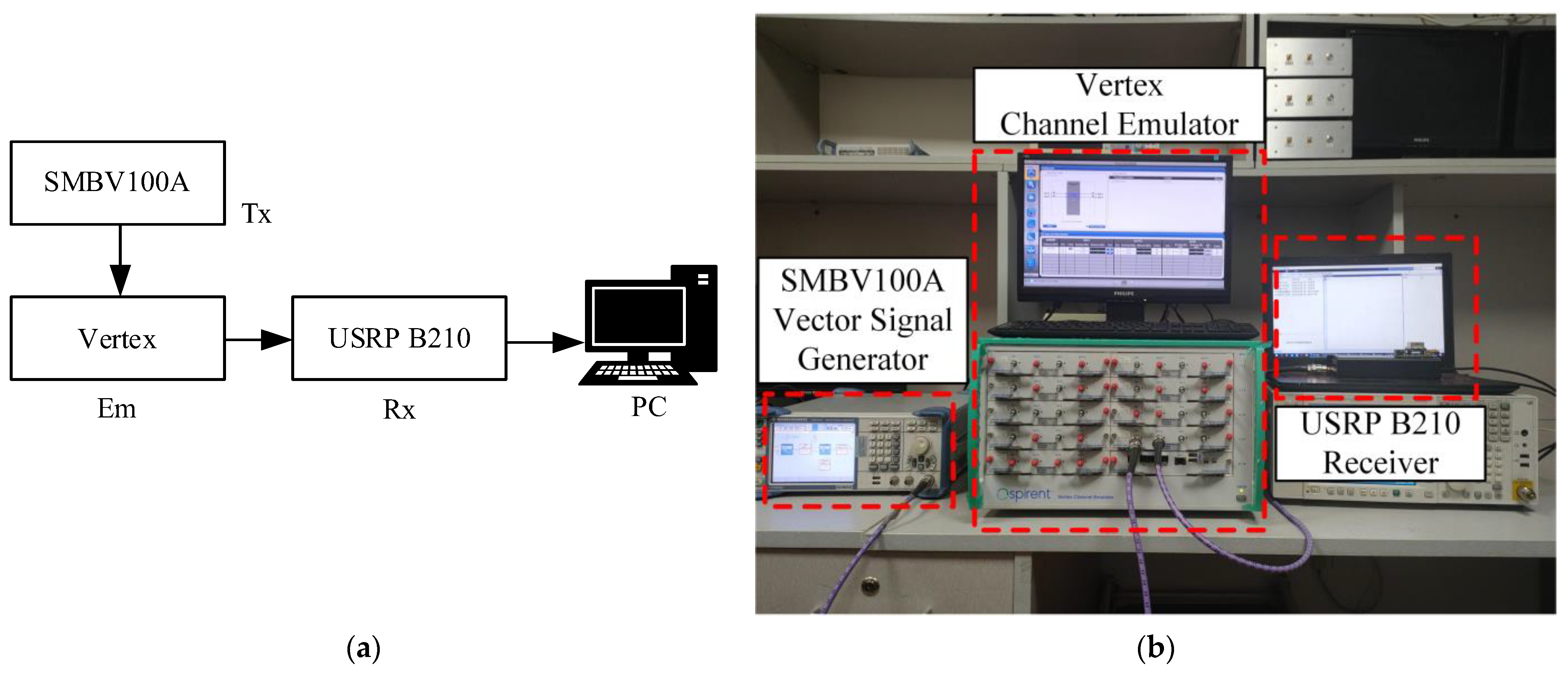
5.2. Hardware-in-the-Loop Simulation
- Efficient testing: The hardware-in-the-loop simulation overcomes the time-consuming nature and limited scope of field testing, allowing for a comprehensive analysis of communication performance in various channel conditions within a shorter timeframe. It provides valuable insights and corresponding deployment suggestions.
- Accuracy and reliability: In comparison to software simulation, the hardware-in-the-loop simulation platform utilizes an actual signal source as the transmitter, ensuring more accurate and reliable results.
- Versatility: The channel emulator supports the import of channel models, making use of models obtained by various research institutes. This versatility enhances the adaptability of the simulation platform.
- The improved algorithm enhances PSSS detection performance when the velocity is 0 km/h in this scenario. The improved algorithm can maintain a CDR close to 0.9 at −14 dB, the SSA achieves a CDR of 0.9 at −12 dB, and the M = 2 BCCA and CCA reach a CDR of 0.9 at −10 dB. Therefore, the SSA is approximately 2 dB worse than the improved algorithm, and the M = 2 BCCA and CCA are about 4 dB worse than the improved algorithm.
- The improved algorithm also enhances PSSS detection performance when the velocity is 120 km/h. The improved algorithm can maintain a CDR close to 0.9 at −10 dB. In contrast, the SSA achieves a CDR of 0.9 at −7 dB, which is about 3 dB worse than the improved algorithm.
- The improved algorithm appears to have better PSSS detection performance when the velocity is 0 km/h in this scenario. It maintains a CDR close to 0.9 at −12 dB. In contrast, the SSA achieves a CDR of 0.9 at −9 dB, indicating a 3 dB performance gap compared to the improved algorithm. The M = 2 BCCA and CCA achieve a CDR close to 0.9 at −2 dB, highlighting a 10 dB degradation compared to the improved algorithm.
- The improved algorithm also sustains superior PSSS detection performance when the velocity is 50 km/h in this scenario. At a velocity of 50 km/h, the improved algorithm maintains a CDR close to 0.9 at −2.5 dB. Conversely, the SSA achieves a CDR close to 0.9 at 2 dB, reflecting a performance gap of approximately 4.5 dB compared to the improved algorithm.
6. Conclusions
- Refinement of frequency offset estimation algorithms: Although this paper achieved coarse estimation of the frequency offset using a semi-symbol-based frequency offset estimation algorithm, there remains room for improvement. The inherent ±N error between the coarse synchronization point and the ideal synchronization point introduces a certain level of error in the frequency offset estimation. Therefore, future efforts should focus on exploring and developing more accurate frequency offset estimation algorithms to obtain precise frequency offset values.
- Enhancement of the SSSS detection algorithm: This paper primarily focused on researching and improving the primary synchronization signal detection algorithm. However, since the detection performance of the primary synchronization signal significantly influences overall synchronization signal detection, future work could delve into the development of a robust detection algorithm for secondary synchronization signals. Enhancing the algorithm to detect the SSSS can contribute to an overall improvement in synchronization signal detection performance.
- Symbol timing synchronization algorithm for 5G NR-V2X: NR-V2X has evolved from LTE-V2X, with the time–frequency resource definition for NR-V2X, having a subcarrier spacing of 15 kHz, being essentially similar to LTE-V2X. The difference lies in the fact that, in LTE-V2X, a 1 ms subframe contains two slots, and each time slot comprises 7 symbols. However, in NR-V2X with a subcarrier spacing of 15 kHz, a 1 ms subframe contains one slot, and the time slot consists of 14 symbols. Similar to LTE-V2X, the sidelink D2D link is also utilized in NR-V2X systems. Therefore, existing synchronization algorithms still hold reference value for NR-V2X. However, to support advanced applications (autonomous driving, vehicle platooning, etc.), NR-V2X introduces some new features, such as a flexible frame structure and the use of m-sequences to generate primary synchronization signals instead of ZC sequences. Hence, it is necessary to explore corresponding algorithms for NR-V2X systems based on the foundation of LTE-V2X timing synchronization algorithms.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, S.; Shi, Y.; Hu, J. Cellular Vehicle to Everything (C-V2X): A Review. Bull. Natl. Nat. Sci. Found. China 2020, 34, 179–185. [Google Scholar] [CrossRef]
- Saad, M.M.; Khan, M.T.R.; Shah, S.H.A.; Kim, D. Advancements in Vehicular Communication Technologies: C-V2X and NR-V2X Comparison. IEEE Commun. Mag. 2021, 59, 107–113. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L.; Li, W. A Vision of C-V2X: Technologies, Field Testing, and Challenges with Chinese Development. IEEE Internet Things J. 2020, 7, 3872–3881. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L. Technologies, standards and applications of LTE-V2X for vehicular networks. Telecommun. Sci. 2018, 34, 1–11. [Google Scholar]
- Hur, D.; Lee, D.; Oh, J.; Won, D.; Song, C.; Cho, S. Survey on Challenges and Solutions of C-V2X: LTE-V2X Communication Technology. In Proceedings of the 2023 Fourteenth International Conference on Ubiquitous and Future Networks (ICUFN), Paris, France, 4–7 July 2023; pp. 639–641. [Google Scholar] [CrossRef]
- Gyawali, S.; Xu, S.; Qian, Y.; Hu, R.Q. Challenges and Solutions for Cellular Based V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 222–255. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L. LTE-V: A TD-LTE-Based V2X Solution for Future Vehicular Network. IEEE Internet Things J. 2016, 3, 997–1005. [Google Scholar] [CrossRef]
- The 3rd Generation Partnership Project. Evolved Universal Terrestrial Radio Access (E-UTRA), Physical Layer Procedures: TS 36.213 v14.2.0; 3GPP Support Office: Sophia Antipolis Valbonne, France, 2017; Available online: https://www.etsi.org/deliver/etsi_ts/136200_136299/136213/14.02.00_60/ts_136213v140200p.pdf (accessed on 27 December 2023).
- The 3rd Generation Partnership Project. Physical Layer Procedures: TS36.331 v.14.5.1; 3GPP Support Office: Sophia Antipolis Valbonne, France, 2018; Available online: https://www.etsi.org/deliver/etsi_ts/136200_136299/136212/14.05.01_60/ts_136212v140501p.pdf (accessed on 27 December 2023).
- Gul, M.M.U.; Ma, X.; Lee, S. Timing and Frequency Synchronization for OFDM Downlink Transmissions Using Zadoff-Chu Sequences. IEEE Trans. Wirel. Commun. 2015, 14, 1716–1729. [Google Scholar] [CrossRef]
- van de Beek, J.J.; Sandell, M.; Borjesson, P.O. ML estimation of time and frequency offset in OFDM systems. IEEE Trans. Signal Process. 1997, 45, 1800–1805. [Google Scholar] [CrossRef]
- Park, B.; Cheon, H.; Ko, E.; Kang, C.; Hong, D. A blind OFDM synchronization algorithm based on cyclic correlation. IEEE Signal Process. Lett. 2004, 11, 83–85. [Google Scholar] [CrossRef]
- Zhang, D.M.; Li, X.; Chen, J.T. Research on Timing Synchronization Algorithm of Primary Synchronization Signal in 5G System. Study Opt. Commun. 2019, 3, 59–64. [Google Scholar]
- Nassralla, M.H.; Mansour, M.M.; Jalloul, L.M. A Low-Complexity Detection Algorithm for the Primary Synchronization Signal in LTE. IEEE Trans. Veh. Technol. 2016, 65, 8751–8757. [Google Scholar] [CrossRef]
- Abdzadeh-Ziabari, H.; Zhu, W.-P.; Swamy, M.N.S. Joint Maximum Likelihood Timing, Frequency Offset, and Doubly Selective Channel Estimation for OFDM Systems. IEEE Trans. Veh. Technol. 2018, 67, 2787–2791. [Google Scholar] [CrossRef]
- Bhamri, A.; Li, Z.; Lindh, L.; Ribeiro, C. Primary synchronization signal detection method for device-to-device in LTE-Rel 12 and beyond. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- You, Y.-H.; Song, H.-K. Sequential Detection of Cyclic Prefix Mode, Sidelink Synchronization Signal, and Frequency Offset for LTE Device-to-Device Networks. IEEE Trans. Ind. Inform. 2020, 17, 3982–3991. [Google Scholar] [CrossRef]
- Du, S. The Synchronization Techniques in the LTE-V2X System. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2018. [Google Scholar]
- Vankayala, S.K.; Akhtar, J.; Krishnan, K.A.; Sah, A.K. Accelerated Detection Schemes for PSS in 5G-NR. In Proceedings of the 2020 IEEE 3rd 5G World Forum (5GWF), Bangalore, India, 10–12 September 2020; pp. 460–466. [Google Scholar] [CrossRef]
- Zheng, R.; Wang, X.; Pan, W.; Chen, X. Research and simulation on synchronization algorithm of PSS in a 5G system based on block cross-coirelation. J. Southeast Univ. (Engl. Ed.) 2021, 37, 245–250. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Berggren, F.; Popović, B.M. Primary Synchronization Signal for D2D Communications in LTE-Advanced. IEEE Commun. Lett. 2015, 19, 1241–1244. [Google Scholar] [CrossRef]
- Morelli, M.; Moretti, M. A Robust Maximum Likelihood Scheme for PSS Detection and Integer Frequency Offset Recovery in LTE Systems. IEEE Trans. Wirel. Commun. 2016, 15, 1353–1363. [Google Scholar] [CrossRef]
- Qualcomm Incorporated. DMRS Enhancements for V2V PSCCH and PSSCH: 3GPP R1-164417. In Proceedings of the 3GPP TSG RAN WG1 Meeting#85, Nanjing, China, 23–27 May 2016; p. 7. [Google Scholar]
- CATT. Discussion on Resource Selection Mechanism in PC5-Based V2V: 3GPP R1-164201. In Proceedings of the 3GPP TSG RAN WG1 Meeting#85, Nanjing, China, 23–27 May 2016. [Google Scholar]
- LG Electronics. Revision of WI: Support for V2V Services Based on LTE Sidelink: RP-160649. In Proceedings of the 3GPP TSG RAN Meeting #71, Göteborg, Sweden, 7–10 March 2016. [Google Scholar]
- The 3rd Generation Partnership Project. Study on LTE-Based V2X Services: 3GPP TR 36.885 v14.4.0; 3GPP Support Office: Sophia Antipolis Valbonne, France, 2016.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Carrier Frequency | 5.915 GHz |
| Sub-carrier Spacing | 15 kHz |
| Transmission Bandwidth | 20 M (100 RBs) |
| FFT Size | 2048 |
| Sample Rate | 30.72 M |
| LTE-V2X Subframe | SC-FDMA |
| Cyclic Prefix Type | Normal |
| Threshold | T1 = 0.2/T2 = 0.7 |
| Modulation Order | QPSK (Quadrature Phase Shift Keying) |
| Channel Parameters | AWGN ε = 0/ε = 0.5/ε = 1 |
| Simulation Window | 1000 LTE-V2X subframe |
| Parameters | Values |
|---|---|
| Carrier Frequency | 5.915 GHz |
| Transmit Power | −40 dBm |
| Sub-carrier Spacing | 15 kHz |
| Transmission Bandwidth | 20 M (100 RBs) |
| FFT Size | 2048 |
| Sample Rate | 30.72 M |
| LTE-V2X Subframe | SC-FDMA |
| Cyclic Prefix Type | Normal |
| SLID | 0 |
| Number of Subframes | 1000 |
| Scenario | Channel Model | Velocity [km/h] |
|---|---|---|
| Urban-NLOS | Umi-NLOS micro-cell | 0 |
| Urban-NLOS | Umi-NLOS micro-cell | 50 |
| Highway-LOS | Umi-LOS micro-cell | 0 |
| Highway-LOS | Umi-LOS micro-cell | 120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Chen, B.; Qiu, J.; Zhuang, L.; Wang, Z.; Liu, L. A Robust Timing Synchronization Algorithm Based on PSSS for LTE-V2X. Computers 2024, 13, 12. https://doi.org/10.3390/computers13010012
Zhang J, Chen B, Qiu J, Zhuang L, Wang Z, Liu L. A Robust Timing Synchronization Algorithm Based on PSSS for LTE-V2X. Computers. 2024; 13(1):12. https://doi.org/10.3390/computers13010012
Chicago/Turabian StyleZhang, Ju, Bin Chen, Jiahui Qiu, Lingfan Zhuang, Zhiyuan Wang, and Liu Liu. 2024. "A Robust Timing Synchronization Algorithm Based on PSSS for LTE-V2X" Computers 13, no. 1: 12. https://doi.org/10.3390/computers13010012
APA StyleZhang, J., Chen, B., Qiu, J., Zhuang, L., Wang, Z., & Liu, L. (2024). A Robust Timing Synchronization Algorithm Based on PSSS for LTE-V2X. Computers, 13(1), 12. https://doi.org/10.3390/computers13010012