A Compromise Programming for Multi-Objective Task Assignment Problem


Abstract
1. Introduction
1.1. Background
1.2. Related Work
1.3. Contribution
2. Mathematical Problem
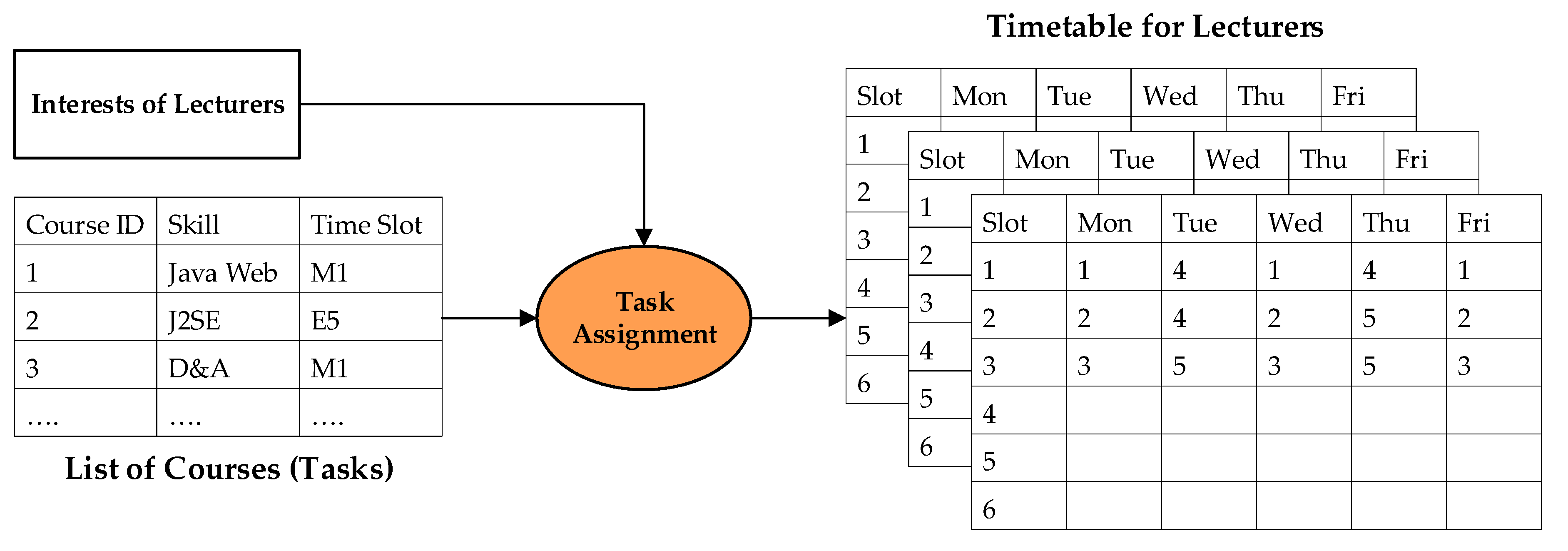
2.1. Multi-Objective Task Assignment Problem
- Let is the number of lecturers.
- Denote is the number of subjects.
- is the number of available time slots, in our case, as described in Table 1.
- is the number of section, a section represents a particular class studies a specific subject at a timeslot.
- are class, subject, and time slot of section -th respectively.
- is a number of classes that lecturer -th prefers to teach.
- is a minimum number of classes that the lecturer -th has to teach.
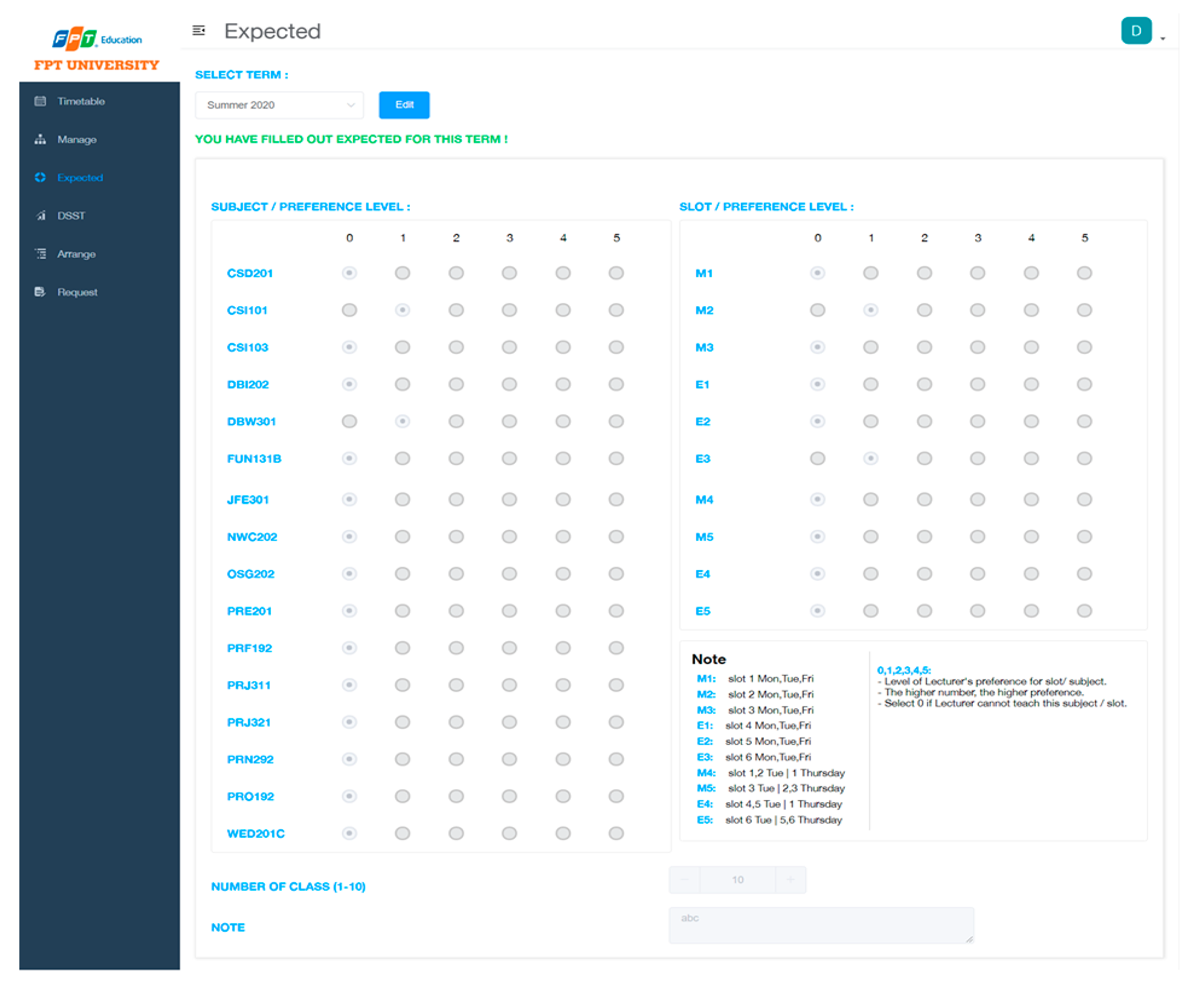
- as integer for every represent the rating of the lecturer -th to teach subject -th. The value indicates that the lecturer does not want to teach the subject. Other values respectively mean “like a little” to “like very much”.
- as integer for every denote the rating of the lecturer -th to teach at time slot -th. The value indicates that the lecturer does not want to teach at the time slot. Other values respectively mean “like a little” to “like very much.”
- is the decision variable for every . if the lecturer -th is assigned to section -th, otherwise.
- All section must be assigned lecturer and at most one lecturer is assigned to a section.
- A particular lecturer does not teach the subject that he/she does not have skill.
- A particular lecturer does not teach at the time-slot that he/she is not available.
- All lecturers have to satisfy the quota for the number of sections they have to teach.
- Maximize the expectations of the lecturers on the subject they want to teach.
- Maximize the expectations of the lecturers on the time slots they want to teach.
- Minimize the errors on the number of classes that the lecturers want to teach.
2.2. Compromise Programming for MOP
- How much faculty satisfaction on preferred time-slot and skill is good? Ideally, what they receive should be what they expect.
- Denote is the matrix of idea timetable.
- Let is the matrix of the solution. where is the vector of final timetable for lecturer -th, such that:
- is the matrix of the worse possible solution. where is the vector of the worse timetable for lecturer -th, such that:
3. Proposed Algorithm
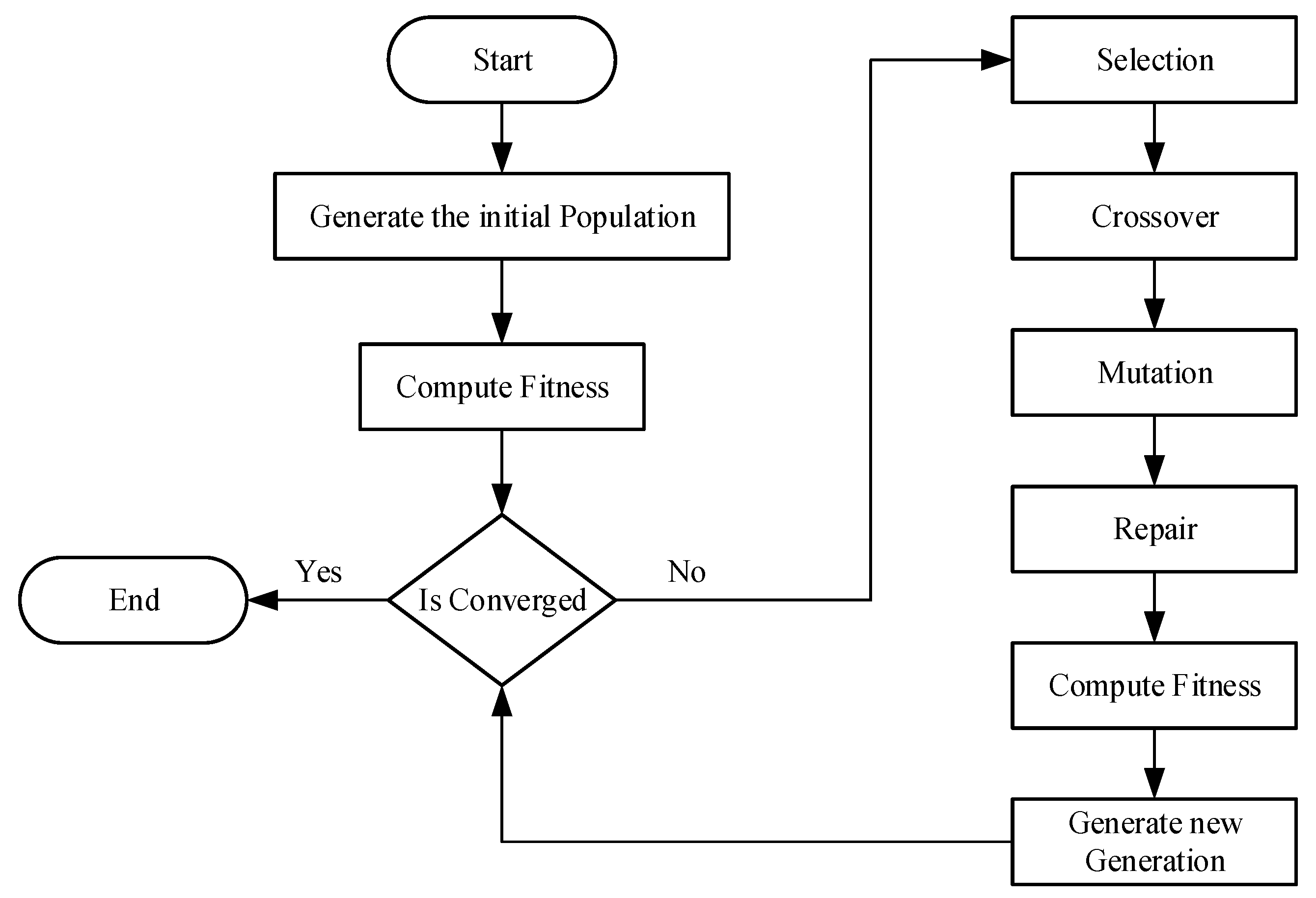
3.1. Introduction to Genetic Algorithm
3.2. Genetic Algorithm Scheme
3.2.1. Genetic Representation
3.2.2. Fitness Function
3.2.3. Algorithm Operations
- represents the size of the population.
- as the population at generation -th.
- as the individual -th of the population at generation -th, represented as chromosome matrix described in Section 3.2.1. denotes the value of the cell at row -th and column -th.
- as the set of sections that learn at time-slot -th.
- as the tournament size for selection.
- Β as the mutation rate
3.2.4. Repair Process
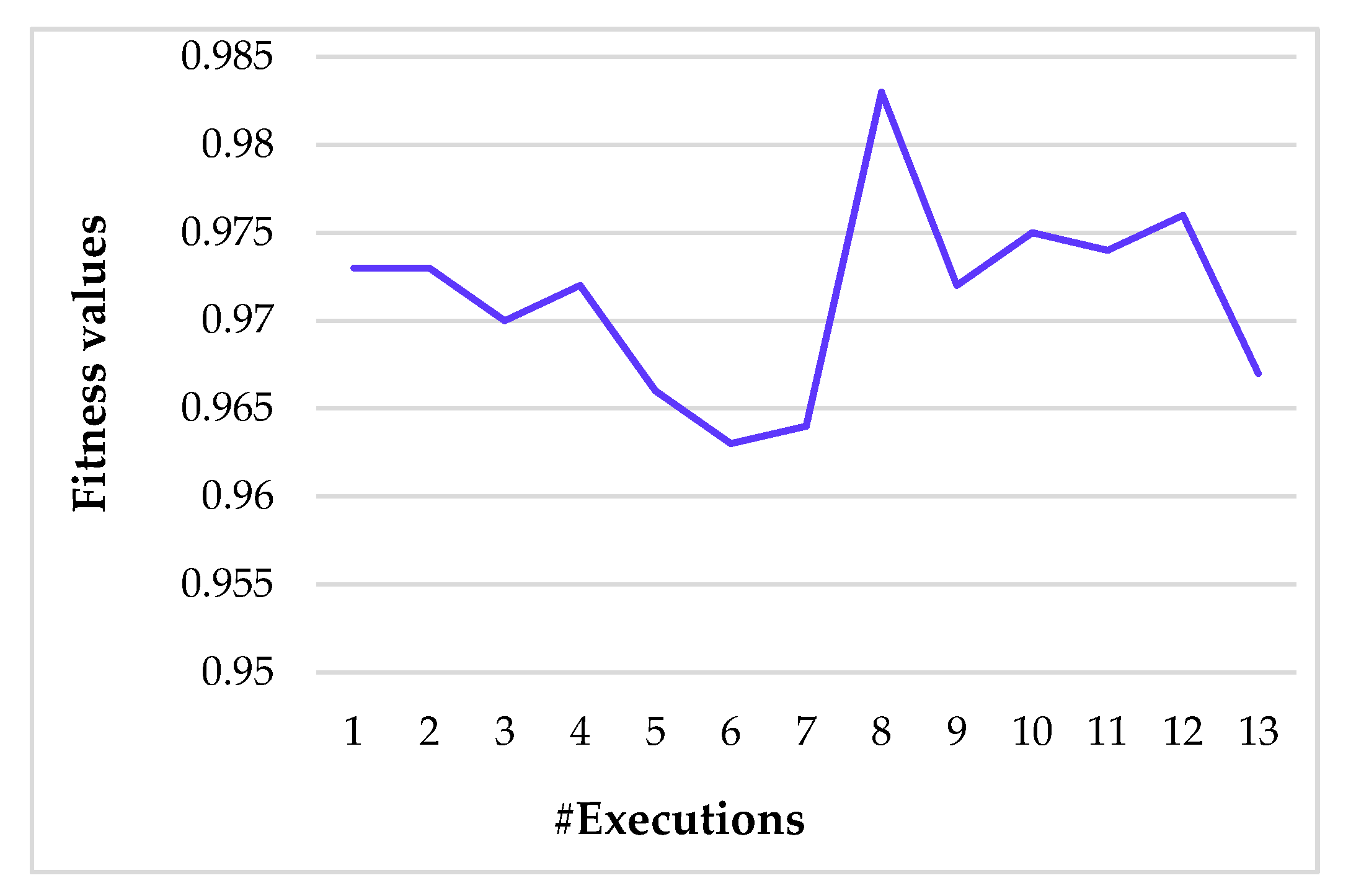
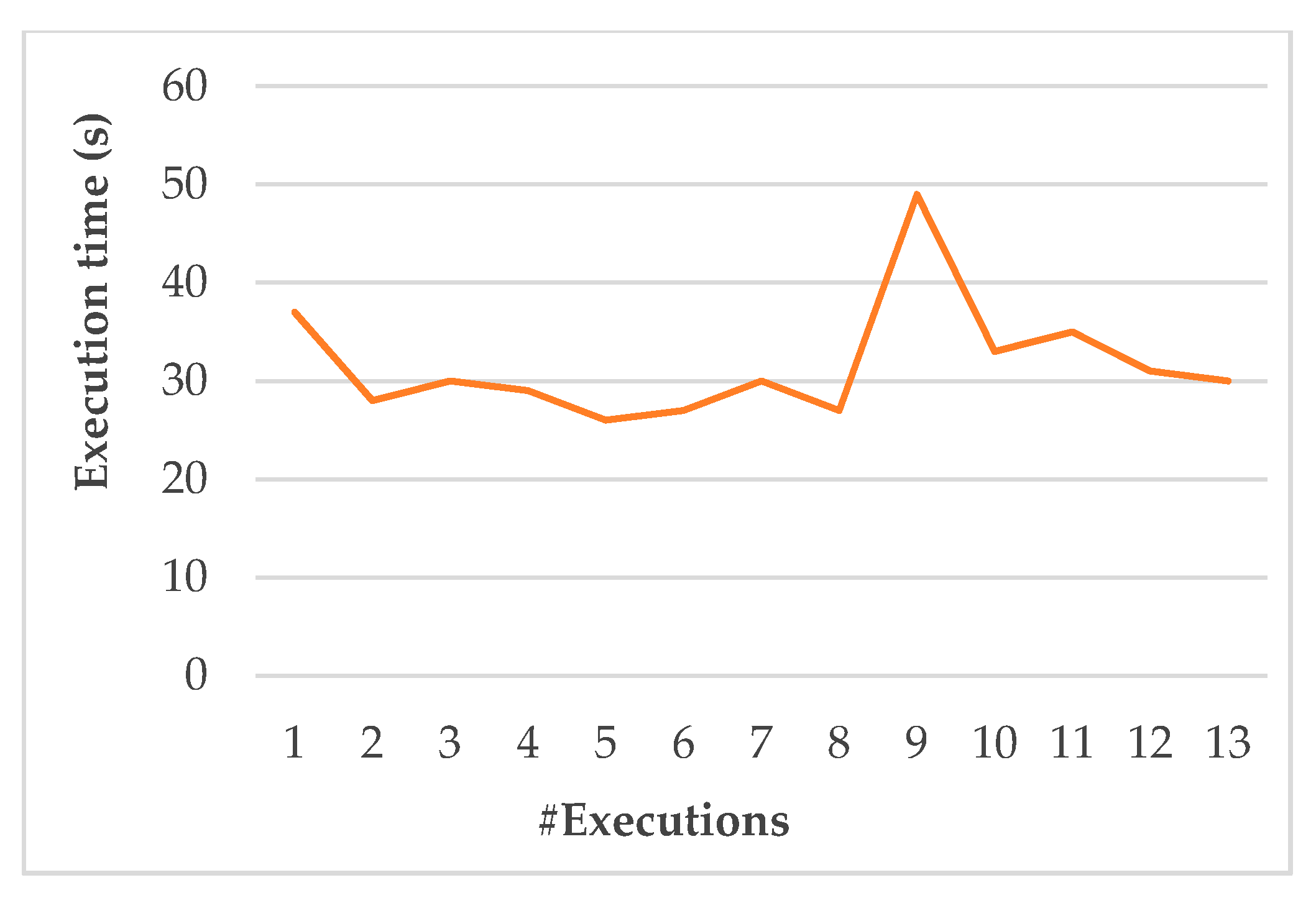
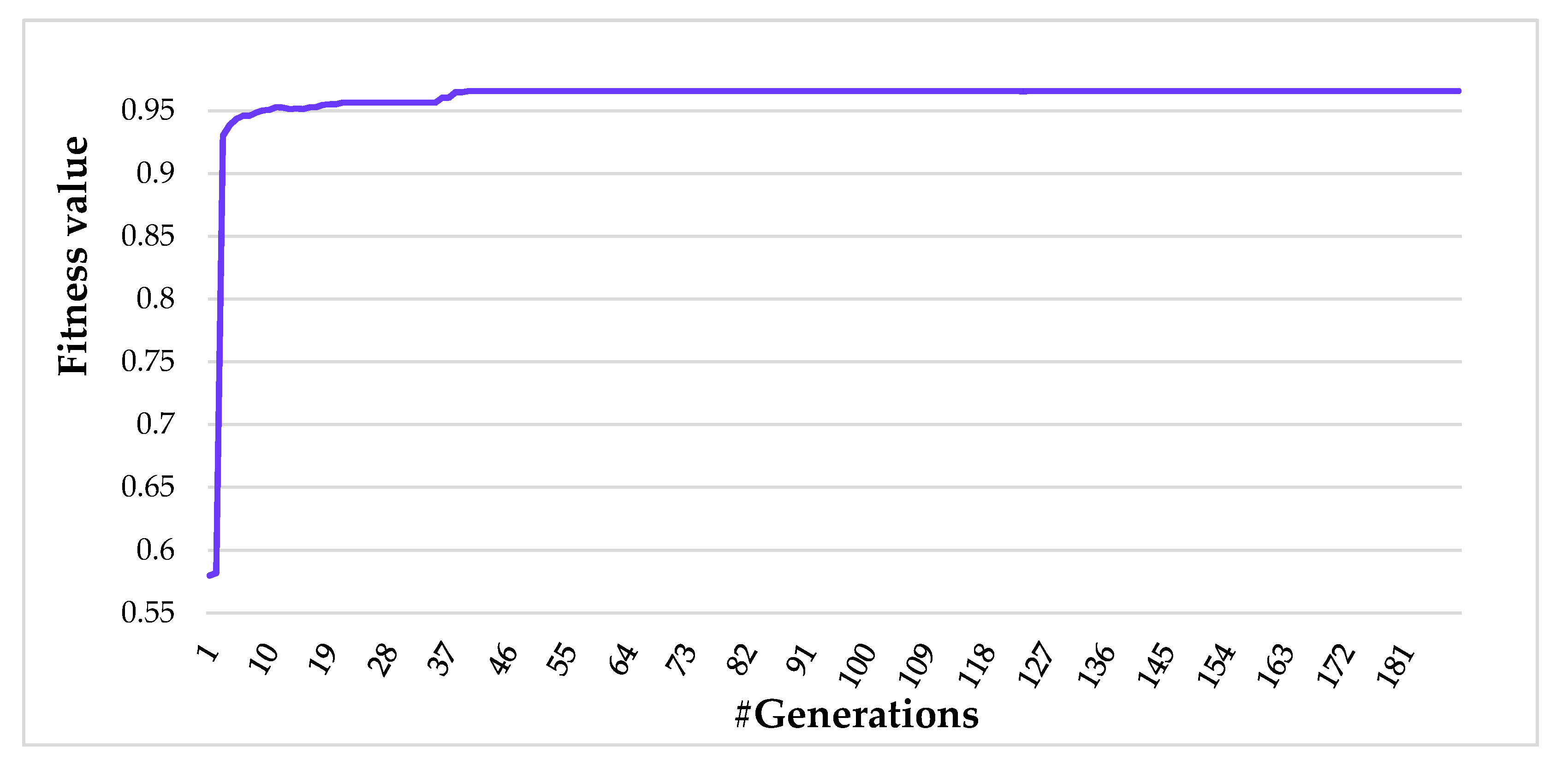
4. Experiment and Result
| Function: | |
| Input: | |
| 1: | |
| 2: | = |
| 3: | |
| 4: | If and () Return |
| 5: | If and () Return |
| 6: | If and () Return |
| 7: | If and () Return |
| 8: | If and () Return |
| 9: | If and () Return |
| 10: | If and () Return |
| 11: | If and () Return |
| 12: | If and () Return |
| 13: | If Return |
| The function defined as: | |
| Function: | |
| Input: | |
| 1: | |
| 2: | If () Then |
| 3: | If () Then |
| 4: | If () Then |
| 5: | If () Then |
| 6: | Return |
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Andrade, P.R.L.; Steiner, M.T.A.; Góes, A.R.T. Optimization in timetabling in schools using a mathematical model, local search and Iterated Local Search procedures. Gestão Produção 2019, 26, e3421. [Google Scholar] [CrossRef]
- Lemos, A.; Melo, F.S.; Monteiro, P.T.; Lynce, I. Room usage optimization in timetabling: A case study at Universidade de Lisboa. Oper. Res. Perspect. 2018, 100092. [Google Scholar] [CrossRef]
- Ghiani, G.; Manni, E.; Romano, A. Training offer selection and course timetabling for remedial education. Comput. Ind. Eng. 2017, 111, 282–288. [Google Scholar] [CrossRef]
- Vermuyten, H.; Lemmens, S.; Marques, I.; Beliën, J. Developing compact course timetables with optimized student flows. Eur. J. Oper. Res. 2016, 251, 651–661. [Google Scholar] [CrossRef]
- Babaei, H.; Karimpour, J.; Hadidi, A. A survey of approaches for university course timetabling problem. Comput. Ind. Eng. 2015, 86, 43–59. [Google Scholar] [CrossRef]
- Pentico, D.W. Assignment problems: A golden anniversary survey. Eur. J. Oper. Res. 2007, 176, 774–793. [Google Scholar] [CrossRef]
- Daskalaki, S.; Birbas, T.; Housos, E. An integer programming formulation for a case study in university timetabling. Eur. J. Oper. Res. 2004, 153, 117–135. [Google Scholar] [CrossRef]
- Feng, X.; Lee, Y.; Moon, I. An integer program and a hybrid genetic algorithm for the university timetabling problem. Optim. Methods Softw. 2016, 32, 625–649. [Google Scholar] [CrossRef]
- Nouri, H.E.; Driss, O.B. MATP: A Multi-agent Model for the University Timetabling Problem. In Software Engineering Perspectives and Application in Intelligent Systems; Silhavy, R., Senkerik, R., Oplatkova, Z., Silhavy, P., Prokopova, Z., Eds.; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2016; Volume 465. [Google Scholar] [CrossRef]
- Nouri, H.E.; Driss, O.B. Distributed model for university course timetabling problem. In Proceedings of the 2013 International Conference on Computer Applications Technology (ICCAT), Sousse, Tunisia, 20–22 January 2013. [Google Scholar] [CrossRef]
- Malik, B.B.; Nordin, S.Z. Mathematical model for timetabling problem in maximizing the preference level. In Proceeding of the 25th National Symposium on Mathematical Sciences (Sksm25): Mathematical Sciences as the Core of Intellectual Excellence, Pahang, Malaysia, 27–29 August 2017; AIP Conference Proceedings. p. 020037. [Google Scholar] [CrossRef]
- Santos, H.G.; Uchoa, E.; Ochi, L.S.; Maculan, N. Strong bounds with cut and column generation for class-teacher timetabling. Ann. Oper. Res. 2012, 194, 399–412. [Google Scholar] [CrossRef][Green Version]
- Dorneles, Á.P.; de Araújo, O.C.B.; Buriol, L.S. A fix-and-optimize heuristic for the high school timetabling problem. Comput. Oper. Res. 2014, 52, 29–38. [Google Scholar] [CrossRef]
- Hmer, A.; Mouhoub, M. Teaching Assignment Problem Solver. Lect. Notes Comput. Sci. 2010, 298–307. [Google Scholar] [CrossRef]
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Fisher, M.L.; Jaikumar, R.; Wassenhove, L.N.V. A multiplier adjustment method for the generalized assignment problem. Manag. Sci. 1986, 32, 1095–1103. [Google Scholar] [CrossRef]
- Lewis, R. A survey of metaheuristic-based techniques for University Timetabling problems. OR Spectr. 2007, 30, 167–190. [Google Scholar] [CrossRef]
- Muthuraman, S.; Venkatesan, V.P. A Comprehensive Study on Hybrid Meta-Heuristic Approaches Used for Solving Combinatorial Optimization Problems. In Proceedings of the 2017 World Congress on Computing and Communication Technologies (WCCCT), Tiruchirappalli, India, 2–4 February 2017. [Google Scholar]
- Sigl, B.; Golub, M.; Mornar, V. Solving timetable scheduling problem using genetic algorithms. In Proceedings of the 25th International Conference on Information Technology Interfaces (ITI 2003), Cavtat, Croatia, 19 June 2003; pp. 519–524. [Google Scholar]
- Savić, A.; Tošić, D.; Marić, M.; Kratica, J. Genetic algorithm approach for solving the task assignment problem. Serdica J. Comput. 2008, 2, 267–276. [Google Scholar]
- Sapru, V.; Reddy, K.; Sivaselvan, B. Time table scheduling using Genetic Algorithms employing guided mutation. In Proceedings of the 2010 IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 28–29 December 2010; pp. 1–4. [Google Scholar]
- Yang, S.; Jat, S.N. Genetic algorithms with guided and local search strategies for university course timetabling. Syst. Man Cybern. Part C Appl. Rev. 2011, 41, 93–106. [Google Scholar] [CrossRef]
- Corne, D.; Ross, P.; Fang, H. Evolving timetables. In The Practical Handbook of Genetic Algorithms; Chambers, L.C., Ed.; CRC: Boca Raton, FL, USA, 1995; Volume 1, pp. 219–276. [Google Scholar]
- Hwang, C.-L.; Masud, A.S.M. Multiple Objective Decision Making, Methods and Applications: A State-of-the-Art Survey; Springer: Berlin/Heidelberg, Germany, 1979; ISBN 978-0-387-09111-2. [Google Scholar]
- Zeleny, M. Compromise Programming. In Multiple Criteria Decision Making; Cochrane, J.L., Zeleny, M., Eds.; University of South Carolina Press: Columbia, SC, USA, 1973; pp. 262–301. [Google Scholar]
- Son, N.T.; Thanh, L.V.; Duong, T.B.; Anh, B.N. A decision support tool for cross-functional team selection: Case study in ACM-ICPC team selection. In Proceedings of the 2018 International Conference on Information Management & Management Science (IMMS‘18); ACM: New York, NY, USA, 2018; pp. 133–138. [Google Scholar] [CrossRef]
- Son, N.T.; Thuy, T.T.; Anh, B.N.; van Dinh, T. DCA-Based Algorithm for Cross-Functional Team Selection. In Proceedings of the 2019 8th International Conference on Software and Computer Applications (ICSCA‘19); ACM: New York, NY, USA, 2019; pp. 125–129. [Google Scholar] [CrossRef]
- Ngo, T.S.; Bui, N.A.; Tran, T.T.; Le, P.C.; Bui, D.C.; Nguyen, T.D.; Phan, L.D.; Kieu, Q.T.; Nguyen, B.S.; Tran, S.N. Some Algorithms to Solve a Bi-Objectives Problem for Team Selection. Appl. Sci. 2020, 10, 2700. [Google Scholar] [CrossRef]
- Mahmudova, S. Application of the TOPSİS method to improve software efficiency and to optimize its management. Soft Comput. 2020, 24, 697–708. [Google Scholar] [CrossRef]
- Xu, X.; Hu, Z.; Su, Q.; Xiong, Z. Multiobjective Collective Decision Optimization Algorithm for Economic Emission Dispatch Problem. Complexity 2018, 2018, 1027193. [Google Scholar] [CrossRef]
- Wei, W.; Tian, Z.-Y. An improved multi-objective optimization method based on adaptive mutation particle swarm optimization and fuzzy statistics algorithm. J. Stat. Comput. Simul. 2017, 1–14. [Google Scholar] [CrossRef]
- Van Veldhuizen, D.A.; Lamont, G.B. Multiobjective Evolutionary Algorithms: Analyzing the State-of-the-Art. Evol. Comput. 2000, 8, 125–147. [Google Scholar] [CrossRef] [PubMed]
- Thede, S.M. An Introduction to Genetic Algorithms. J. Comput. Sci. Coll. 2004, 20. [Google Scholar]
- Miller, B.; Goldberg, D. Genetic Algorithms, Tournament Selection, and the Effects of Noise. Complex Syst. 1995, 9, 193–212. [Google Scholar]
- Otman, A.; Jaafar, A. A comparative study of adaptive crossover operators for genetic algorithms to resolve the travelling salesman problem. Int. J. Comput. Appl. 2011, 31, 49–57. [Google Scholar]
- Hopcroft, J.E.; Karp, R.M. An n5/2 algorithm for maximum matchings in bipartite graphs. SIAM J. Comput. 1973, 2, 225–231. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DoW | Monday | Tuesday | Wednesday | Thursday | Friday | Part of the Day | |
|---|---|---|---|---|---|---|---|
| Time-Slot | |||||||
| 1 | M1 | M4 | M1 | M4 | M1 | Morning | |
| 2 | M2 | M2 | M5 | M2 | |||
| 3 | M3 | M5 | M3 | M3 | |||
| 4 | E1 | E4 | E1 | E4 | E1 | After Noon | |
| 5 | E2 | E2 | E5 | E2 | |||
| 6 | E3 | E5 | E3 | E3 | |||
| Param | Value | Observation Results |
|---|---|---|
| mutation | 0.9–1 | Stable results, processing time increased slightly |
| 0.5–0.8 | Stable results, processing time increased | |
| 0–0.5 | Stable results, stable time execution | |
| tournament size | 2 | Results decreased slightly, stable time execution |
| 3 | Stable results, processing time increased | |
| 5 | Stable results, stable time execution | |
| 7 | Stable results, processing time decreased | |
| 9 | Stable results, processing time decreased | |
| population size | 100–150 | Stable results, processing time increased |
| 151–200 | Stable results decreased, processing time increased |
| Parameter | Stop after | |||||
| Value | 0.4 | 100 | 7 | 30 | 0.3 | 0.7 |
| Algorithm | Fitness Values | Time Execution (s) |
|---|---|---|
| Brute Force | 0.95919 | 468 |
| Genetic Algorithm | 0.95919 | 0.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ngo, S.T.; Jaafar, J.; Aziz, I.A.; Anh, B.N. A Compromise Programming for Multi-Objective Task Assignment Problem. Computers 2021, 10, 15. https://doi.org/10.3390/computers10020015
Ngo ST, Jaafar J, Aziz IA, Anh BN. A Compromise Programming for Multi-Objective Task Assignment Problem. Computers. 2021; 10(2):15. https://doi.org/10.3390/computers10020015
Chicago/Turabian StyleNgo, Son Tung, Jafreezal Jaafar, Izzatdin Abdul Aziz, and Bui Ngoc Anh. 2021. "A Compromise Programming for Multi-Objective Task Assignment Problem" Computers 10, no. 2: 15. https://doi.org/10.3390/computers10020015
APA StyleNgo, S. T., Jaafar, J., Aziz, I. A., & Anh, B. N. (2021). A Compromise Programming for Multi-Objective Task Assignment Problem. Computers, 10(2), 15. https://doi.org/10.3390/computers10020015